Устройство управления транспортного средства и способ управления транспортным средством - RU2568048C1
Код документа: RU2568048C1
Чертежи
























Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к устройству управления и способу управления для управления состоянием транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] Патентный документ 1 раскрывает технологию для оценки скорости рабочего хода из флуктуаций скорости вращения колес в предварительно определенной частотной области и модификации демпфирующей силы амортизатора с регулируемой демпфирующей силой в соответствии со скоростью рабочего хода, чтобы управлять поведением подрессоренных масс.
ДОКУМЕНТЫ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
ПАТЕНТНЫЕ ДОКУМЕНТЫ
[0003] Патентный документ 1. Выложенная заявка на патент Японии № 2009-241813
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ПРОБЛЕМЫ, РАЗРЕШАЕМЫЕ ИЗОБРЕТЕНИЕМ
[0004] Тем не менее, проблема, встречающаяся в вышеуказанном предшествующем уровне техники, заключается в том, что когда возникают возмущения скорости вращения колес в предварительно определенной частотной области, понижается точность оценки скорости рабочего хода.
С учетом вышеприведенного, цель настоящего изобретения заключается в том, чтобы предоставлять устройство управления и способ управления транспортным средством, посредством которых можно определять снижение точности оценки состояния подрессоренной массы.
СРЕДСТВО ДЛЯ РЕШЕНИЯ УКАЗАННЫХ ПРОБЛЕМ
[0005] Чтобы достигать вышеуказанной цели, в устройстве управления транспортного средства настоящего изобретения, состояние подрессоренной массы оценивается на основе информации скорости вращения колес в предварительно определенной частотной области, определенной посредством датчиков скорости вращения колес, и актуаторы управляются таким образом, чтобы переводить оцененное состояние подрессоренной массы в целевое состояние подрессоренной массы, а также вычислять опорную скорость вращения колес для каждого колеса на основе модели при виде сверху кузова транспортного средства. Затем, когда дифференциал между опорными скоростями вращения колес для колес на низкочастотной стороне относительно предварительно определенной частотной области, в которой возникает поведение подрессоренной массы, равен или превышает предписанное значение, определено то, что снижена точность оценки состояния подрессоренной массы.
ПРЕИМУЩЕСТВО ИЗОБРЕТЕНИЯ
[0006] Следовательно, может быть определено то, что снижена точность оценки состояния подрессоренной массы, и могут не допускаться случаи, в которых управление продолжается при снижении точности оценки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Фиг. 1 является принципиальной схемой системы, показывающей устройство управления транспортного средства согласно первому варианту осуществления.
Фиг. 2 является блок-схемой управления, показывающей конфигурацию управления, выполняемого посредством устройства управления транспортного средства согласно первому варианту осуществления.
Фиг. 3 является концептуальной схемой, показывающей конфигурацию системы управления скоростью вращения колес с обратной связью согласно первому варианту осуществления.
Фиг. 4 является блок-схемой управления, показывающей конфигурацию модуля оценки состояния вождения первого варианта осуществления.
Фиг. 5 является блок-схемой управления, показывающей подробности управления в модуле вычисления скорости рабочего хода первого варианта осуществления.
Фиг. 6 является блок-схемой, показывающей конфигурацию модуля вычисления опорной скорости вращения колес первого варианта осуществления.
Фиг. 7 является принципиальной схемой, показывающей модель вибрации кузова транспортного средства.
Фиг. 8 является блок-схемой управления, показывающей управление наклоном при торможении в первом варианте осуществления.
Фиг. 9 является графиком, одновременно показывающим частотный профиль скорости вращения колес, определенный посредством датчика скорости вращения колес, и частотный профиль рабочего хода из датчика рабочего хода, не установленного в настоящем варианте осуществления.
Фиг. 10 является блок-схемой управления, показывающей частотно-чувствительное управление при управлении демпфированием вибрации подрессоренной массы в первом варианте осуществления.
Фиг. 11 является графиком корреляции, показывающим профили ощущений человека в различных частотных областях.
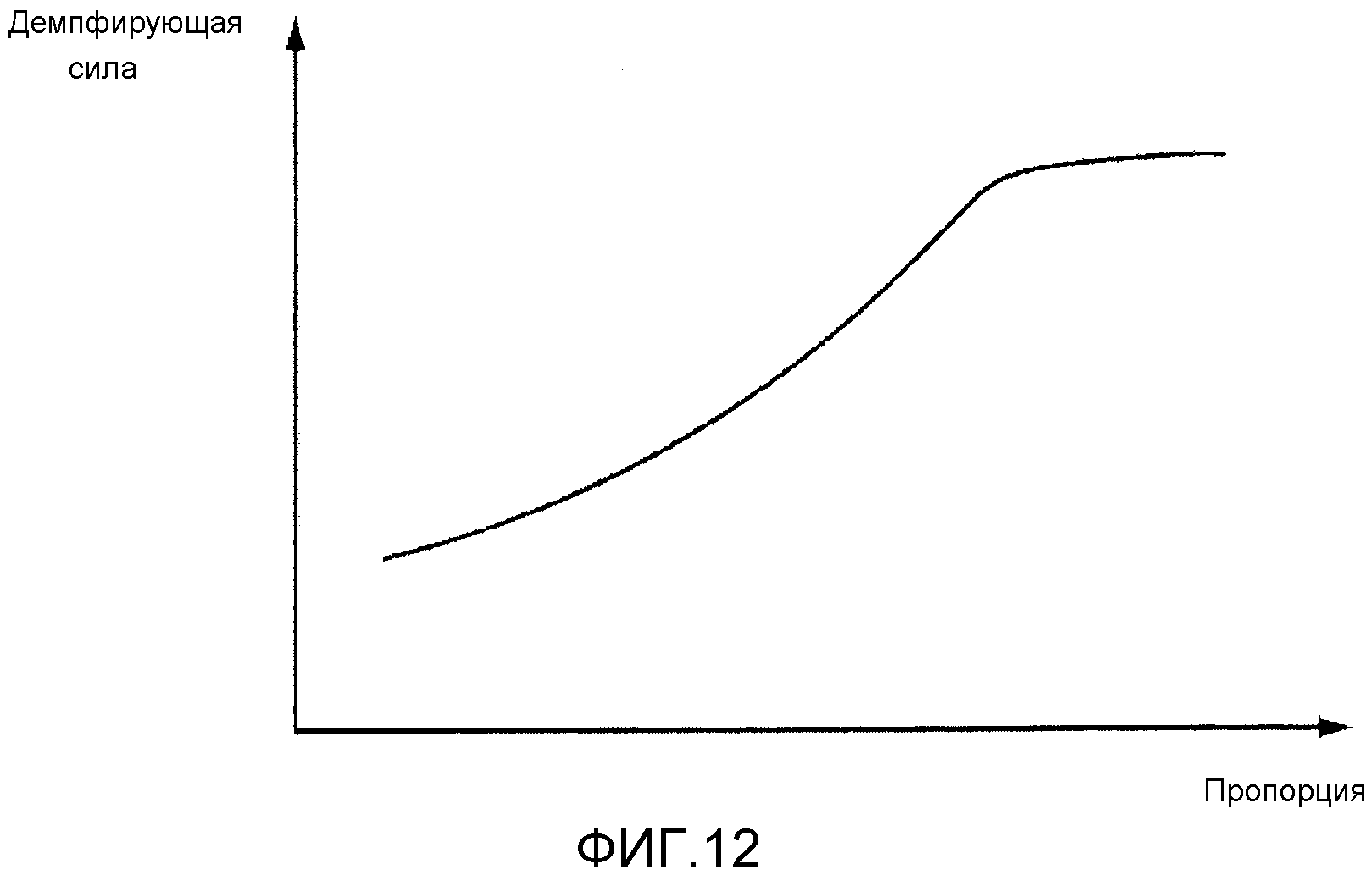
Фиг. 12 является графиком, показывающим взаимосвязь между пропорцией "засоренности" вибрации и демпфирующей силой в области покачивания при частотно-чувствительном управлении первого варианта осуществления.
Фиг. 13 является схемой, показывающей частотный профиль скорости вращения колес, определенный посредством датчика скорости вращения колес в определенных условиях вождения.
Фиг. 14 является блок-схемой управления, показывающей конфигурацию управления минимизацией угловой скорости крена в первом варианте осуществления.
Фиг. 15 является временной диаграммой, показывающей процесс формирования формы сигнала огибающей для управления минимизацией угловой скорости крена в первом варианте осуществления.
Фиг. 16 является блок-схемой, показывающей конфигурацию управления для управления демпфированием вибрации неподрессоренной массы в первом варианте осуществления.
Фиг. 17 является блок-схемой управления, показывающей конфигурацию управления для модуля управления демпфирующей силой первого варианта осуществления.
Фиг. 18 является блок-схемой последовательности операций способа для процесса согласования коэффициентов демпфирования, выполняемого во время стандартного режима в первом варианте осуществления.
Фиг. 19 является блок-схемой последовательности операций способа для процесса согласования коэффициентов демпфирования, выполняемого во время спортивного режима в первом варианте осуществления.
Фиг. 20 является блок-схемой последовательности операций способа для процесса согласования коэффициентов демпфирования, выполняемого во время комфортного режима в первом варианте осуществления.
Фиг. 21 является блок-схемой последовательности операций способа для процесса согласования коэффициентов демпфирования, выполняемого во время режима движения по шоссе в первом варианте осуществления.
Фиг. 22 является временной диаграммой, показывающей изменения коэффициента демпфирования во время вождения по поверхности дороги с подъемом и по поверхности ухабистой дороги.
Фиг. 23 является блок-схемой последовательности операций способа для процесса выбора режима на основе состояния вождения, выполняемого посредством модуля согласования коэффициентов демпфирования первого варианта осуществления.
Фиг. 24 является блок-схемой управления, показывающей конфигурацию управления устройства управления транспортного средства согласно первому варианту осуществления.
Фиг. 25 является блок-схемой управления, показывающей конфигурацию модуля управления определенной сниженной точностью оценки в первом варианте осуществления.
Фиг. 26 является описательной схемой, показывающей способ задания коэффициента демпфирования при сниженной точности оценки в модуле задания коэффициентов демпфирования первого варианта осуществления.
ПОЯСНЕНИЯ НОМЕРОВ ССЫЛОК
[0008] 1 - двигатель
1a - контроллер двигателя (модуль управления двигателем)
2 - модуль управления тормозом
2a - тормозной контроллер (модуль управления тормозом)
3 - S/A (амортизатор с регулируемой демпфирующей силой)
3a - S/A-контроллер
5 - датчик скорости вращения колес
6 - интегрированный датчик
7 - датчик угла поворота при рулении
8 - датчик скорости транспортного средства
20 - тормоз
31 - модуль управления входными воздействиями от водителя
32 - модуль оценки состояния вождения
33 - модуль управления демпфированием вибрации подрессоренной массы
33a - модуль управления подвеской по принципу "skyhook"
33b - модуль частотно-чувствительного управления
34 - модуль управления демпфированием вибрации неподрессоренной массы
35 - модуль управления демпфирующей силой
331 - модуль вычисления первой целевой величины управления ориентацией
332 - модуль вычисления величины управления ориентацией посредством двигателя
333 - модуль вычисления второй целевой величины управления ориентацией
334 - модуль вычисления величины управления ориентацией посредством тормоза
335 - модуль вычисления третьей целевой величины управления ориентацией
336 - модуль вычисления величины управления ориентацией посредством амортизатора
ПРЕДПОЧТИТЕЛЬНЫЕ ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0009] ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Фиг. 1 является принципиальной схемой системы, показывающей устройство управления транспортного средства согласно первому варианту осуществления. Транспортное средство содержит двигатель 1, составляющий источник мощности, тормоза 20 для формирования тормозного крутящего момента посредством приложения силы трения к колесам (тормоза, соответствующие отдельным колесам, далее упоминаются следующим образом: передний правый тормоз: 20FR; передний левый тормоз: 20FL; задний правый тормоз: 20RR; задний левый тормоз: 20RL) и амортизаторы 3, допускающие управление переменной демпфирующей силой, предоставленные между каждым из колес и кузовом транспортного средства ("амортизатор" сокращенно называется "S/A" в нижеприведенном описании, и S/A, соответствующие отдельным колесам, упоминаются следующим образом: передний правый S/A: 3FR; передний левый S/A: 3FL; задний правый S/A: 3RR; задний левый S/A: 3RL).
[0010] Двигатель 1 имеет контроллер 1a двигателя (также упоминается в дальнейшем как модуль управления двигателем и соответствует средству управления источником мощности). Контроллер 1a двигателя управляет рабочим режимом двигателя (число об/мин двигателя, выходной крутящий момент двигателя и т.д.) требуемым образом посредством управления открытием дроссельного клапана, уровнем впрыска топлива, распределением зажигания и т.п. двигателя 1. Тормоза 20 формируют тормозной крутящий момент, на основе гидравлического давления, подаваемого из модуля 2 управления тормозом допускающего управление тормозным гидравлическим давлением для каждого из колес, согласно состоянию вождения. Модуль 2 управления тормозом имеет тормозной контроллер 2a (также упоминается в дальнейшем как модуль управления тормозом) для управления тормозным крутящим моментом, сформированным посредством тормозов 20, требуемым гидравлическим давлением, сформированным в тормозах 20 для каждого из колес посредством открытия и закрытия множества соленоидных клапанов с использованием давления в главном цилиндре, сформированного посредством нажатия водителем педали тормоза, или давлением насоса, сформированным посредством встроенного насоса с приводом от электромотора, в качестве источника гидравлического давления.
[0011] S/A 3 представляет собой устройства формирования демпфирующей силы для демпфирования упругого перемещения спиральных пружин, предоставленных между неподрессоренной массой (осями, колесами и т.д.) и подрессоренной массой (кузовом транспортного средства и т.д.) транспортного средства, причем демпфирующая сила спроектирована так, что она является переменной за счет работы актуаторов. Каждый S/A 3 имеет цилиндр, в котором герметизируется жидкость, поршень, который выполняет рабочие ходы в цилиндре, и диафрагму для управления перемещением жидкости между жидкостными камерами, сформированными выше и ниже поршня. Диафрагмы, имеющие различные диаметры диафрагмы, формируются в поршне, и диафрагма, соответствующая команде управления, выбирается из различных диафрагм, когда актуатор S/A работает. В силу этого формируется демпфирующая сила, соответствующая диаметру диафрагмы. Перемещение поршня проще ограничивается, если диаметр диафрагмы является небольшим, за счет чего демпфирующая сила является более высокой, и перемещение поршня сложнее ограничивается, если диаметр диафрагмы является большим, снижая демпфирующую силу.
[0012] Помимо выбора диаметра диафрагмы, демпфирующая сила также может задаваться, например, посредством расположения регулирующего соленоидного клапана в соединительном канале, соединяющем жидкость, образующуюся выше и ниже поршня, и управляющим величиной открытия и закрытия регулирующего соленоидного клапана; изобретение не ограничено конкретным образом в этом отношении. Каждый S/A 3 имеет S/A-контроллер 3a (соответствующий средству управления демпфирующей силой) для управления демпфирующей силой S/A 3, причем демпфирующая сила управляется через регулирование диаметра диафрагмы посредством актуатора S/A.
[0013] Также предоставлены датчики 5 скорости вращения колес для определения скорости вращения колес для каждого из колес (ниже при указании скоростей вращения колес, соответствующих отдельным колесам, они упоминаются как: скорость вращения переднего правого колеса: 5FR; скорость вращения переднего левого колеса: 5FL; скорость вращения заднего правого колеса: 5RR; скорость вращения заднего левого колеса: 5RL); интегрированный датчик 6 для определения ускорения при движении вперед/назад, угловой скорости рысканья и поперечного ускорения, действующего на центр тяжести транспортного средства; датчик 7 угла поворота при рулении для определения угла поворота при рулении, указывающего величину, на которую водитель поворачивает руль; датчик 8 скорости транспортного средства для определения скорости транспортного средства, датчик 9 крутящего момента двигателя для определения крутящего момента двигателя; датчик 10 числа об/мин двигателя для определения числа об/мин двигателя; датчик 11 давления в главном цилиндре для определения давления в главном цилиндре; тормозной переключатель 12 для вывода сигнала включенного состояния, когда нажата педаль тормоза; датчик 13 открытия акселератора для определения степени открытия педали акселератора; и температурный датчик 14 для определения температуры наружного воздуха. Сигналы из этих различных датчиков вводятся в контроллер 1 двигателя, тормозной контроллер 2a и S/A-контроллер 3a по мере необходимости. Интегрированный датчик 6 может быть расположен в местоположении центра тяжести транспортного средства или в некотором другом местоположении без конкретного ограничения при условии, что активирована конфигурация, посредством которой является возможной оценка различных значений в позиции центра тяжести. Датчик не должен обязательно иметь интегрированный тип; также могут предоставляться отдельные датчики для определения угловой скорости рысканья, ускорения при движении вперед/назад и поперечного ускорения.
[0014] ОБЩАЯ КОНФИГУРАЦИЯ УСТРОЙСТВА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА
В устройстве управления транспортного средства согласно первому варианту осуществления, три актуатора используются для того, чтобы управлять вибрационным состоянием, возникающим в подрессоренной массе. Поскольку управление, соответственно, выполняемое посредством них, служит для того, чтобы управлять состоянием подрессоренной массы в это время, помехи являются проблемой. Помимо этого, элементы, управляемые посредством двигателя 1, элементы, управляемые посредством тормозов 20, и элементы, управляемые посредством S/A 3, соответственно, отличаются, и вопрос касательно того, в каких комбинациях должны управляться эти элементы, представляет собой другую проблему.
Например, тормоза 20 допускают управление вертикальным колебательным движением и движением наклона, но управление обоими видами движения создает сильное чувство замедления и имеет тенденцию создавать дискомфорт для водителя. S/A 3 допускает полное управление движением крена, вертикальным колебательным движением и движением наклона, но в случаях, в которых в широких диапазонах все выполняется посредством S/A 3, затраты на изготовление S/A 3 могут быть больше, и демпфирующая сила зачастую является более высокой, создавая тенденцию для ввода высокочастотной вибрации от поверхности дороги и имея тенденцию создавать дискомфорт для водителя. Другими словами, существует компромисс в том, что управление, выполняемое посредством тормозов 20, не должно приводить к ухудшению высокочастотной вибрации, но должно приводить к усиленному чувству замедления, тогда как управление, выполняемое посредством S/A 3, не должно создавать чувство замедления, но может приводить к вводу высокочастотной вибрации.
[0015] Таким образом, в устройстве управления транспортного средства первого варианта осуществления, выполняется всесторонняя оценка этих проблем, и для того чтобы достигать конфигурации управления с использованием соответствующих преимуществ соответствующих характеристик управления при взаимной компенсации их слабостей, чтобы за счет этого предоставлять устройство управления транспортного средства, которое, при том, что является недорогим, предлагает превосходные рабочие характеристики демпфирования вибрации, система управления в целом создана с учетом главным образом следующих примерных аспектов.
(1) Величина управления посредством S/A 3 минимизируется посредством параллельного управления двигателем 1 и тормозами 20.
(2) Движение, подлежащее управлению посредством тормозов 20, ограничивается движением наклона, в силу этого исключая чувство замедления, возникающее вследствие управления посредством тормозов 20.
(3) Величина управления, выполняемого посредством двигателя 1 и тормозов 20, ограничивается меньше фактически выводимой величины управления, за счет этого уменьшая нагрузку на S/A 3, при минимизации неестественного ощущения, ассоциированного с управлением, выполняемым посредством двигателя 1 и тормозов 20.
(4) Управление подвеской по принципу "skyhook" выполняется посредством всех актуаторов. Это дает возможность выполнения управления подвеской по принципу "skyhook" через недорогую конфигурацию с использованием всех датчиков скорости вращения колес, установленных в транспортном средстве, без использования датчика рабочего хода, датчика вертикального ускорения подрессоренной массы и т.п., которые обычно требуются для управления подвеской по принципу "skyhook".
(5) Введено новое скалярное управление (частотно-чувствительное управление) для того, чтобы разрешать проблемы, связанные с вводом высокочастотной вибрации, которые трудно разрешать с использованием управления подвеской по принципу "skyhook" или других типов векторного управления, во время управления подрессоренной массой посредством S/A 3.
(6) Режим управления, который должен осуществляться посредством S/A 3, выбирается надлежащим образом согласно состоянию вождения, за счет этого предоставляя режим управления, подходящий для условий вождения.
Выше полностью обобщаются признаки системы управления, созданной согласно варианту осуществления. Далее последовательно описываются подробности этих отдельных признаков.
[0016] Фиг. 2 является блок-схемой управления, показывающей конфигурацию управления посредством устройства управления транспортного средства согласно первому варианту осуществления. В первом варианте осуществления, устройства управления состоят из трех модулей: контроллер 1a двигателя, тормозной контроллер 2a и S/A-контроллер 3a, при этом система управления скоростью вращения колес с обратной связью конфигурируется в соответствующих устройствах управления. Отдельно от соответствующих устройств управления, система имеет модуль 4a определения снижения точности оценки для определения снижения точности оценки, который указывает надежность оценок состояния, проведенных посредством модулей оценки состояния вождения, поясненных ниже (первого модуля 100 оценки состояния вождения, второго модуля 200 оценки состояния вождения и третьего модуля 32 оценки состояния вождения); и модуль 5a управления определенной сниженной точностью оценки, для перехода в подходящий режим управления, когда определено снижение точности оценки. Ниже подробно описываются модуль 4a определения снижения точности оценки и модуль 5a управления определенной сниженной точностью оценки.
Здесь, в первом варианте осуществления показана конфигурация, содержащая три устройства управления в качестве устройств управления; тем не менее, также допустима конфигурация, в которой все устройства управления состоят из интегрированного устройства управления, без конкретных ограничений. Конфигурация, содержащая три устройства управления в первом варианте осуществления, предоставляет переназначение контроллера двигателя и тормозного контроллера существующего транспортного средства в качестве модуля управления двигателем 1a и модуля 2a управления тормозом, при установке отдельного S/A-контроллера 3a, с тем чтобы реализовывать устройство управления транспортного средства согласно первому варианту осуществления.
[0017] КОНФИГУРАЦИЯ КОНТРОЛЛЕРА ДВИГАТЕЛЯ
Контроллер 1a двигателя имеет первый модуль 100 оценки состояния вождения для оценки, на основе скорости вращения колес, определенной главным образом посредством датчиков скорости вращения колес, скорости рабочего хода, угловой скорости вертикального колебательного движения, угловой скорости крена и угловой скорости наклона каждого колеса, для использования при управлении подвеской по принципу "skyhook" посредством модуля 101a управления демпфированием вибрации подрессоренной массы, поясненного ниже; модуль 101 управления ориентацией посредством двигателя для вычисления величины управления ориентацией посредством двигателя, составляющей команду управления крутящим моментом двигателя; и модуль 102 управления двигателем для управления рабочим режимом двигателя 1 на основе вычисленной величины управления ориентацией посредством двигателя. Ниже поясняются подробности процесса оценки посредством первого модуля 100 оценки состояния вождения.
Модуль 101 управления ориентацией посредством двигателя имеет модуль 101a управления демпфированием вибрации подрессоренной массы, который вычисляет величину управления подрессоренной массой для минимизации вертикального колебательного движения и движения крена, вызываемых посредством управления подвеской по принципу "skyhook"; модуль 101b управления нагрузкой при контакте с землей, который вычисляет величину управления минимизацией флуктуации нагрузки при контакте с землей для минимизации флуктуации нагрузки при контакте с землей передних колес и задних колес; и модуль 101c управления входными воздействиями от водителя на стороне двигателя для вычисления, на основе сигналов из датчика 7 угла поворота при рулении и датчика 8 скорости транспортного средства, величины управления откликом по рысканью, соответствующей поведению транспортного средства, которого хочет достигать водитель. Модуль 101 управления ориентацией посредством двигателя вычисляет величину управления ориентацией посредством двигателя, при которой величины управления, вычисленные посредством модулей управления, достигают минимума, причем осуществляет это через оптимальное управление (LQR), и выводит конечную величину управления ориентацией посредством двигателя в модуль 102 управления двигателем. Посредством минимизации вертикального колебательного движения и движения наклона посредством двигателя 1 таким способом, может быть уменьшена величина управления демпфирующей силой в S/A 3, и может не допускаться усиление высокочастотной вибрации. Поскольку S/A 3 может фокусироваться на минимизации движения крена, может эффективно минимизироваться движение крена.
[0018] КОНФИГУРАЦИЯ ТОРМОЗНОГО КОНТРОЛЛЕРА
Тормозной контроллер 2a имеет второй модуль 200 оценки состояния вождения, который, на основе скорости вращения колес, определенной посредством датчиков 5 скорости вращения колес, оценивает скорость рабочего хода, угловую скорость наклона и т.д. для каждого колеса; модуль 201 управления подвеской по принципу "skyhook", который, на основе управления подвеской по принципу "skyhook" на основе оцененной скорости рабочего хода и угловой скорости наклона, вычисляет величину управления ориентацией посредством тормоза (подробно пояснена ниже); и модуль 202 управления тормозом, который управляет тормозным крутящим моментом тормозов 20 на основе вычисленной величины управления ориентацией посредством тормоза. В первом варианте осуществления, используются процессы, идентичные процессам оценки в первом модуле 100 оценки состояния вождения и втором модуле 200 оценки состояния вождения; тем не менее, могут использоваться другие процессы оценки при условии, что процессы заключают в себе оценку из скорости вращения колес. За счет принудительного управления движением наклона посредством тормозов 20 таким способом, может быть уменьшена величина управления демпфирующей силой в S/A 3, и может не допускаться усиление высокочастотной вибрации. Поскольку S/A 3 может фокусироваться на минимизации движения крена, может эффективно минимизироваться движение крена.
[0019] КОНФИГУРАЦИЯ УСТРОЙСТВА УПРАВЛЕНИЯ S/A
S/A-контроллер 3a имеет модуль 31 управления входными воздействиями от водителя, который выполняет управление входными воздействиями от водителя, чтобы достигать требуемой ориентации транспортного средства на основе операции от водителя (операции руления, операции нажатия педали акселератора, операции нажатия педали тормоза и т.п.); третий модуль 32 оценки состояния вождения, который оценивает состояние вождения на основе значений, определенных посредством различных датчиков (главным образом значений датчиков скорости вращения колес из датчиков 5 скорости вращения колес); модуль 33 управления демпфированием вибрации подрессоренной массы, который управляет состоянием вибрации подрессоренной массы на основе оцененного состояния вождения; модуль 34 управления демпфированием вибрации неподрессоренной массы, который управляет состоянием вибрации неподрессоренной массы на основе оцененного состояния вождения; и модуль 35 управления демпфирующей силой, который на основе величины управления ориентацией посредством амортизатора, выводимой посредством модуля 31 управления входными воздействиями от водителя, величины демпфирования вибрации подрессоренной массы, выводимой посредством модуля 33 управления демпфированием вибрации подрессоренной массы, и величины демпфирования вибрации неподрессоренной массы, выводимой посредством модуля 34 управления демпфированием вибрации неподрессоренной массы, определяет демпфирующую силу, которая должна задаваться для S/A 3, и выполняет управление демпфирующей силой S/A. В первом варианте осуществления, используются процессы оценки, идентичные процессам оценки в первом модуле 100 оценки состояния вождения, во втором модуле 200 оценки состояния вождения и в третьем модуле 32 оценки состояния вождения; тем не менее, могут использоваться другие процессы оценки без конкретных ограничений при условии, что процессы заключают в себе оценку из скорости вращения колес.
[0020] В первом варианте осуществления, механизмы управления с обратной связью создаются с возможностью использовать датчики 5 скорости вращения колес всех актуаторов. Фиг. 3 является концептуальной схемой, показывающей конфигурацию системы управления скоростью вращения колес с обратной связью согласно первому варианту осуществления. Двигатель 1, тормоза 20 и S/A 3, соответственно, составляют отдельную систему управления двигателем с обратной связью, систему управления тормозом с обратной связью и систему управления S/A с обратной связью. Когда соответствующие актуаторы работают отдельно без мониторинга их взаимных рабочих режимов, управление помехами становится проблемой. Тем не менее, поскольку эффекты, сформированные посредством управления каждым актуатором, проявляются в качестве флуктуаций соответствующих скоростей вращения колес, за счет создания системы управления скоростью вращения колес с обратной связью, эффекты актуаторов взаимно отслеживаются, как результат исключая помехи управления. Например, когда определенная вибрация подрессоренной массы минимизируется посредством двигателя 1, флуктуации в скорости вращения колес возникают в ассоциации с этим. Даже если другие актуаторы не имеют подробных сведений по управлению, выполняемому посредством двигателя 1, управление посредством тормозов 20 и S/A 3 выполняется на основе скорости вращения колес, которая отражает эти эффекты. В частности, поскольку механизм управления с обратной связью состоит в применении совместно используемых значений скорости вращения колес даже во время отдельного управления без применения взаимного мониторинга для целей управления, управление в конечном счете выполняется на основе взаимного мониторинга (в дальнейшем в этом документе, такое управление называется "совместным управлением"), и ориентация транспортного средства может задаваться с возможностью сходиться в устойчивом направлении. Ниже последовательно описываются системы управления с обратной связью.
[0021] МОДУЛЬ ОЦЕНКИ СОСТОЯНИЯ ВОЖДЕНИЯ
Сначала описываются первый, второй и третий модули оценки состояния вождения, которые предоставляются в системах управления с обратной связью и совместно используют общую конфигурацию. В первом варианте осуществления, используются процессы оценки, идентичные процессам оценки в первом модуле 100 оценки состояния вождения, во втором модуле 200 оценки состояния вождения и в третьем модуле 32 оценки состояния вождения. Следовательно, поскольку процессы в модулях оценки являются общими для каждого из них, процесс оценки, осуществляющийся в третьем модуле 32 оценки состояния вождения, описывается как характерный. При условии, что скорость вращения колес используется в оценке состояния, каждый из этих модулей оценки состояния вождения может содержать отдельную модель оценки без конкретных ограничений.
[0022] Фиг. 4 является блок-схемой управления, показывающей конфигурацию третьего модуля оценки состояния вождения первого варианта осуществления. Третий модуль 32 оценки состояния вождения первого варианта осуществления вычисляет скорость рабочего хода, угловую скорость вертикального колебательного движения, угловую скорость крена и угловую скорость наклона для каждого колеса, используемого при управлении подвеской по принципу "skyhook", выполняемом посредством модуля 33 управления демпфированием вибрации подрессоренной массы, как описано ниже, причем осуществляет это фундаментально на основе скоростей вращения колес, определенных посредством датчиков 5 скорости вращения колес. Во-первых, значения из датчика 5 скорости вращения колес для каждого из колес вводятся в модуль 321 вычисления скорости рабочего хода, и скорость перемещения подрессоренной массы вычисляется посредством модуля 321 вычисления скорости рабочего хода из скоростей рабочих ходов, вычисленных для колес.
[0023] Фиг. 5 является блок-схемой управления, показывающей подробности управления в модуле вычисления скорости рабочего хода первого варианта осуществления. Модуль 321 вычисления скорости рабочего хода предоставляется отдельно для каждого колеса, и блок-схема управления, показанная на фиг. 5, является блок-схемой управления, сфокусированной на конкретном колесе. Модуль 321 вычисления скорости рабочего хода имеет модуль 300 вычисления опорной скорости вращения колес для вычисления опорной скорости вращения колес на основе значений из датчиков 5 скорости вращения колес, угла σf поворота при рулении передними колесами, определенного посредством датчика 7 угла поворота при рулении, угла σr поворота при рулении задними колесами (фактического угла поворота при рулении задними колесами, когда предоставляется устройство рулевого управления задними колесами; в противном случае равен нулю), поперечной скорости кузова транспортного средства и фактической угловой скорости рысканья, определенных посредством интегрированного датчика 6; модуль 321a вычисления частоты вибрации при вращении шин для вычисления частоты вибрации при вращении шин на основе вычисленной опорной скорости вращения колес; модуль 321b вычисления отклонения для вычисления отклонения между опорной скоростью вращения колес и значениями датчика скорости вращения колес (т.е. варьирования скорости вращения колес); модуль 321c GEO-преобразования для преобразования отклонения, вычисленного посредством модуля 321b вычисления отклонения, в величину рабочего хода подвески; модуль 321d калибровки скорости рабочего хода для калибровки преобразованной величины рабочего хода как скорости рабочего хода; и процессор 321e сигналов для применения полосового режекторного фильтра, соответствующего частоте, вычисленной посредством модуля 321a вычисления частоты вибрации при вращении шин, к калиброванному значению из модуля 321d калибровки скорости рабочего хода, чтобы исключать первичный компонент вибрации при вращении шин и вычислять конечную скорость рабочего хода.
[0024] МОДУЛЬ ВЫЧИСЛЕНИЯ ОПОРНОЙ СКОРОСТИ ВРАЩЕНИЯ КОЛЕС
Ниже описывается модуль 300 вычисления опорной скорости вращения колес. Фиг. 6 является блок-схемой, показывающей конфигурацию модуля вычисления опорной скорости вращения колес первого варианта осуществления. Опорная скорость вращения колес указывает значение, из которого исключены различные типы помех для каждой из скоростей вращения колес. Другими словами, разность между значением датчика скорости вращения колес и опорной скоростью вращения колес является значением, связанным с компонентом, который варьируется согласно рабочему ходу, сформированному посредством вертикального колебательного поведения кузова транспортного средства, поведения при крене, поведения при наклоне или неподрессоренной вертикальной вибрации; в настоящем варианте осуществления, скорость рабочего хода вычисляется на основе этой разности.
[0025] Модуль 301 извлечения компонента движения на плоской поверхности, с использованием значений датчика скорости вращения колес в качестве вводов, вычисляет первую скорость V0 вращения колес в качестве опорной скорости вращения колес для каждого из колес на основе модели при виде сверху кузова транспортного средства; ω (рад/с) является значением датчика скорости вращения колес, определенным посредством датчика 5 скорости вращения колес, σf (рад) является фактическим углом поворота при рулении передними колесами, определенным посредством датчика 7 угла поворота при рулении, σr (рад) является фактическим углом поворота при рулении задними колесами, Vx является поперечной скоростью кузова транспортного средства, γ (рад/с) является угловой скоростью рысканья, определенной посредством интегрированного датчика 6, V (м/с) является скоростью кузова транспортного средства, оцененной из вычисленной опорной скорости ω0 вращения колес, VFL, VFR, VRL и VRR являются опорными скоростями вращения колес, которые должны быть вычислены, Tf является шириной колеи передних колес, Tr является шириной колеи задних колес, Lf является расстоянием до передних колес от местоположения центра тяжести транспортного средства, и Lr является расстоянием до задних колес из местоположения центра тяжести транспортного средства. Модель при виде сверху кузова транспортного средства выражается следующим образом с использованием обозначений, описанных выше.
[0026] (Формула 1)
VFL=(V-Tf/2*γ)coσsf+(Vx+Lf*γ)sinσf
VFR=(V+Tf/2*γ)coσsf+(Vx+Lf*γ)sinσf
VRL=(V-Tr/2*γ)coσsr+(Vx-Lr*γ)sinσr
VRR=(V+Tr/2*γ)coσsr+(Vx-Lr*γ)sinσr
При условии вождения в нормальном режиме, в котором отсутствует поперечное скольжение транспортного средства, 0 может вводиться для поперечной скорости Vx кузова транспортного средства. При перезаписи со значениями на основе V в соответствующих формулах, выражения представляют собой следующее. При перезаписи таким образом, V обозначается как V0FL, V0FR, V0RL и V0RR (эквивалентно первым скоростям вращения колес) в качестве значений, соответствующих соответствующим колесам.
(Формула 2)
V0FL={VFL-Lf*γsinσf}/coσsf+Tf/2*γ
V0FR={VFR-Lf*γsinσf}/coσsf-Tf/2*γ
V0RL={VRL+Lr*γsinσr}/coσsr+Tr/2*γ
V0RR={VRR+Lf*γsinσf}/coσsR-Tr/2*γ
[0027] Модуль 302 исключения помех при крене, с использованием первой скорости V0 вращения колес в качестве ввода, вычисляет вторые скорости V0F, V0R вращения колес в качестве опорных скоростей вращения колес для передних и задних колес на основе модели при виде спереди кузова транспортного средства. Модель при виде спереди кузова транспортного средства используется для того, чтобы исключать разности скоростей вращения колес, сформированные посредством движения крена, возникающего вокруг центра вращения по крену на вертикальной линии, проходящей через центр тяжести транспортного средства, при просмотре транспортного средства спереди, и представляется посредством следующих формул.
V0F=(V0FL+V0FR)/2
V0R=(V0RL+V0RR)/2
Это дает в результате вторые скорости V0F, V0R вращения колес, из которых исключены помехи на основе крена.
[0028] Модуль 303 исключения помех при движении наклона, с использованием вторых скоростей V0F, V0R вращения колес в качестве вводов, вычисляет третьи скорости VbFL, VbFR, VbRL и VbRR вращения колес, составляющие опорные скорости вращения колес для всех колес на основе модели при виде сбоку кузова транспортного средства. Здесь, модель при виде сбоку кузова транспортного средства представляет собой модель, используемую для того, чтобы исключать разности скоростей вращения колес, сформированные посредством движения наклона, возникающего вокруг центра вращения наклона, проходящей через центр тяжести транспортного средства, при просмотре транспортного средства спереди, и представляется посредством следующей формулы.
(Формула 3)
VbFL=VbFR=VbRL=VbRR={Lr/(Lf+Lr)}V0F+{Lf/(Lf+Lr)}V0R
Модуль 304 перераспределения опорной скорости вращения колес, соответственно, заменяет VbFL (=VbFR=VbRL=VbRR) для V в модели при виде сверху кузова транспортного средства, показанной в формуле 1, чтобы вычислять конечные опорные скорости VFL, VFR, VRL, VRR вращения колес для каждого колеса, каждая из которых делится на радиус r0 шины, чтобы вычислять опорную скорость ω0 вращения колес.
[0029] После того, как опорная скорость ω0 вращения колес вычислена для каждого колеса посредством процесса, описанного выше, вычисляется отклонение между этой опорной скоростью ω0 вращения колес и значениями датчика скорости вращения колес; поскольку это отклонение представляет варьирование скорости вращения колес, ассоциированное с рабочим ходом подвески, оно преобразуется в скорость Vzs рабочего хода. По существу, рабочий ход подвески, при удерживании колес, осуществляется не только в вертикальном направлении; дополнительно центры вращения колес перемещаются вперед или назад в ассоциации с рабочим ходом, и оси, оснащенные датчиками 5 скорости вращения колес, сами становятся наклоненными, создавая разность в угле вращения от колес. Поскольку это перемещение вперед и назад приводит к изменениям скорости вращения колес, отклонения между опорной скоростью вращения колес и значениями датчика скорости вращения колес могут быть извлечены посредством ассоциированных с рабочим ходом флуктуаций. Степень флуктуации, которая возникает, может задаваться надлежащим образом, согласно геометрии подвески.
[0030] После того, как скорости Vz_sFL, Vz_sFR, Vz_sRL, Vz_sRR рабочего хода для каждого колеса вычислены посредством модуля 321 вычисления скорости рабочего хода согласно процессу, описанному выше, модуль 322 вычисления скорости перемещения подрессоренной массы вычисляет угловую скорость вертикального колебательного движения, угловую скорость крена и угловую скорость наклона, для использования при управлении подвеской по принципу "skyhook".
[0031] МОДЕЛЬ ОЦЕНКИ
Управление подвеской по принципу "skyhook" означает процесс, за счет которого демпфирующая сила задается на основе взаимосвязи между скоростью рабочего хода S/A 3 и скоростью перемещения подрессоренной массы, и ориентация подрессоренной массы управляется с тем, чтобы достигать состояния плоского вождения. Здесь, для того чтобы достигать управления ориентацией подрессоренной массы через управление подвеской по принципу "skyhook", необходима обратная связь по скорости перемещения подрессоренной массы. Скорость рабочего хода является значением, определимым от датчика 5 скорости вращения колес, и поскольку подрессоренная масса не содержит датчик вертикального ускорения и т.п., скорость перемещения подрессоренной массы должна быть оценена с использованием модели оценки. Ниже поясняются вопросы, связанные с моделью оценки и надлежащей конфигурацией модели, которую следует приспосабливать.
[0032] Фиг. 7 является принципиальной схемой, показывающей модель вибрации кузова транспортного средства. Фиг. 7(a) является моделью для транспортного средства, содержащего S/A, имеющий постоянную демпфирующую силу (в дальнейшем называется "традиционным транспортным средством"), и фиг. 7(b) является моделью для случая, в котором предоставляется S/A с регулируемой демпфирующей силой, и выполняется управление подвеской по принципу "skyhook". На фиг. 7, Ms указывает подрессоренную массу, Mu указывает неподрессоренную массу, Ks указывает модуль упругости спиральной пружины, Cs указывает коэффициент демпфирования S/A, Ku указывает модуль упругости неподрессоренной массы (шины), Cu указывает коэффициент демпфирования неподрессоренной массы (шины), и Cv указывает переменный коэффициент демпфирования; z2 указывает позицию подрессоренной массы, z1 указывает позицию неподрессоренной массы, и z0 указывает позицию поверхности дороги.
[0033] В случае использования модели традиционного транспортного средства, показанной на фиг. 7(a), уравнение движения для подрессоренной массы выражается следующим образом. Дифференциал первого порядка для z1 (т.е. скорость) представляется посредством dz1, а дифференциал второго порядка (т.е. ускорение) представляется посредством ddz1.
(Формула 1 оценки)
Ms*ddz2=-Ks(z2-z1)-Cs(dz2-dz1)
Применение преобразования Лапласа к этому выражению отношения дает в результате следующую формулу.
(Формула 2 оценки)
dz2=-(1/Ms)*(1/s2)*(Cs*s+Ks)(dz2-dz1)
Здесь, dz2-dz1 является скоростью (Vz_sFL, Vz_sFR, Vz_sRL, Vz_sRR) рабочего хода, и следовательно, скорость перемещения подрессоренной массы может быть вычислена из скорости рабочего хода. Тем не менее, модификация демпфирующей силы через управление подвеской по принципу "skyhook" значительно уменьшает точность оценки, создавая такую проблему, что в модели традиционного транспортного средства не может прикладываться большая сила управления ориентацией (модификация демпфирующей силы).
[0034] Тем не менее, возможно использование модели транспортного средства на основе управления подвеской по принципу "skyhook", такой как модель, показанная на фиг. 7(b). Модификация демпфирующей силы по существу заключает в себе модификацию силы, которая ограничивает скорость перемещения поршня S/A 3, ассоциированного с рабочим ходом подвески. Вследствие того факта, что используется полуактивный S/A 3, в котором поршни не могут активно перемещаться в требуемом направлении, приспосабливается модель полуактивной подвески, и вычисление скорости перемещения подрессоренной массы заключается в следующем.
(Формула 3 оценки)
dz2=-(1/Ms)*(1/s2)*{(CS+CV)*s+Ks}(dz2-dz1)
Здесь:
если dz2*(dz2-dz1)0, то Cv=Csky*{dz21(dz2-dz1)}, и
если dz2*(dz2-dz1)<0, то Cv=0.
Иными словами, Cv является прерывистым значением.
[0035] В случаях, в которых требуется оценивать скорость перемещения подрессоренной массы с использованием простого фильтра в модели полуактивной подвески, когда сама модель рассматривается в качестве фильтра, переменные должны быть эквивалентными коэффициентам фильтрации, и псевдодифференциальный член {(Cs+Cv)*s+Ks} включает в себя прерывистый переменный коэффициент Cv демпфирования; следовательно, характеристика фильтра является неустойчивой, и не может получаться подходящая точность оценки. В частности, неустойчивая характеристика фильтра должна приводить к сдвигу фазы. Управление подвеской по принципу "skyhook" не может выполняться, если нарушается отношение соответствия фазы и знака скорости перемещения подрессоренной массы. Следовательно, определено оценивать скорость перемещения подрессоренной массы посредством использования модели активной подвески, в которой можно использовать устойчивый Csky непосредственно, а не на основе взаимосвязи знака скорости перемещения подрессоренной массы и скорости рабочего хода, даже в случаях, в которых используется полуактивный S/A 3. Если приспосабливается модель активной подвески, вычисление скорости перемещения подрессоренной массы заключается в следующем.
[0036] (Формула 4 оценки)
dz2=-(1/s)*{1/(s+Csky/Ms)}*{(Cs/Ms)s+(Ks/Ms)}(dz2-dz1)
В этом случае, псевдодифференциальный член {(Cs/Ms)s+(Ks/Ms)} не обуславливает неоднородность, и термин {1/(s+Csky/Ms)} может быть сконфигурирован посредством фильтра нижних частот. Следовательно, характеристика фильтра является устойчивой, и может быть получена подходящая точность оценки. Следует отметить, что несмотря на приспособление модели активной подвески здесь, на практике возможно только полуактивное управление, и в силу этого управляемый диапазон делится на два. Абсолютная величина оцененной скорости перемещения подрессоренной массы, следовательно, меньше фактической скорости в полосе частот ниже резонанса подрессоренной массы; тем не менее, поскольку фаза является самым важным элементом при управлении подвеской по принципу "skyhook", управление подвеской по принципу "skyhook" может осуществляться при условии, что может поддерживаться соответствие между фазой и знаком; абсолютная величина скорости перемещения подрессоренной массы может регулироваться с использованием других коэффициентов и т.п. и, следовательно, не приводит к проблеме.
[0037] Из вышеуказанной взаимосвязи следует принимать во внимание, что может оцениваться скорость перемещения подрессоренной массы при условии, что известна скорость рабочего хода каждого колеса. Поскольку фактическое транспортное средство имеет не одно колесо, а четыре, далее анализируется оценка состояния подрессоренной массы с использованием скорости рабочего хода каждого колеса через модальное разложение на угловую скорость крена, угловую скорость наклона, угловую скорость вертикального колебательного движения. При вычислении вышеуказанных трех компонентов из скоростей рабочего хода четырех колес, один соответствующий компонент отсутствует, что приводит к неопределенному решению; в силу этого, вводится угловая скорость отклонения от вертикали, которая указывает перемещение противостоящих по диагонали колес. Если xsB обозначает член вертикального колебательного движения, xsR - член крена, xsP - член наклона и xsW - член отклонения от вертикали величины рабочего хода, и z_sFL, z_sFR, z_sRL, z_sRR обозначают величины рабочего хода, соответствующие Vz_sFL, Vz_sFR, Vz_sRL, Vz_sRR, следующая формула является истинной.
[0038] (Формула 1)

Из выражения отношения, показанного выше, дифференциалы dxsB, ..., для xsB, xsR, xsP, xsW могут выражаться посредством следующих формул.
dxsB=1/4(Vz_sFL+Vz_sFR+Vz_sRL+Vz_sRR)
dxsR=1/4(Vz_sFL-Vz_sFR+Vz_sRL-Vz_sRR)
dxsP=1/4(-Vz_sFL-Vz_sFR+Vz_sRL+Vz_sRR)
dxsW=1/4(-Vz_sFL+Vz_sFR+Vz_sRL-Vz_sRR)
[0039] Здесь, взаимосвязь скорости перемещения подрессоренной массы и скорости рабочего хода получается из вышеприведенной формулы 4 оценки; таким образом, в формуле 4 оценки, в которой часть -(1/s)*{1/(s+Csky/Ms)}*{(Cs/Ms)s+(Ks/Ms)} обозначается как G, значения, которые учитывают модальные параметры согласно члену вертикального колебательного движения, члену крена и члену наклона Csky, Cs и Ks, соответственно, (CskyB, CskyR, CskyP, CsB, CsR, CsP, KsB, KsR, KsP), обозначаются как GB, GR и GP; и угловая скорость вертикального колебательного движения обозначается как dB, угловая скорость крена - как dR, а угловая скорость наклона оси - как dP, могут вычисляться следующие значения dB, dR и dP.
dB=GB*dxsB
dR=GR*dxsR
dP=GP*dxsP
Как показано выше, оценки состояния подрессоренной массы фактического транспортного средства могут быть выполнены на основе скоростей рабочего хода для различных колес.
[0040] МОДУЛЬ УПРАВЛЕНИЯ ДЕМПФИРОВАНИЕМ ВИБРАЦИИ ПОДРЕССОРЕННОЙ МАССЫ
Далее описывается конфигурация управления подвеской по принципу "skyhook", выполняемого в модуле 101a управления демпфированием вибрации подрессоренной массы, модуле 201 управления подвеской по принципу "skyhook" и модуле 33 управления демпфированием вибрации подрессоренной массы. Во время управления подвеской по принципу "skyhook", управление выполняется для того, чтобы переводить состояние подрессоренной массы, которое оценено на основе скорости вращения колес вышеописанным способом, в целевое состояние подрессоренной массы. Другими словами, изменения скорости вращения колес являются изменениями, соответствующими состоянию подрессоренной массы, и в случаях, в которых состояние подрессоренной массы, т.е. вертикальное колебательное движение, крен и наклон, управляется в целевое состояние подрессоренной массы, управление выполняется таким образом, что изменения определенной скорости вращения колес равны изменениям скорости вращения колес, соответствующим целевому состоянию подрессоренной массы.
[0041] КОНФИГУРАЦИЯ МОДУЛЯ УПРАВЛЕНИЯ ПОДВЕСКОЙ ПО ПРИНЦИПУ "SKYHOOK"
Устройство управления транспортного средства согласно первому варианту осуществления содержит три актуатора для осуществления управления ориентацией подрессоренной массы, а именно, двигатель 1, тормоза 20 и S/A 3. Из них два элемента (угловая скорость вертикального колебательного движения и угловая скорость наклона) предназначаются для управления посредством модуля 101a управления демпфированием вибрации подрессоренной массы в контроллере 1a двигателя; угловая скорость наклона предназначается для управления посредством модуля 201 управления подвеской по принципу "skyhook" в тормозном контроллере 2a; и три элемента (угловая скорость вертикального колебательного движения, угловая скорость крена и угловая скорость наклона) предназначаются для управления посредством модуля 33a управления подвеской по принципу "skyhook" в S/A 3.
[0042] Величина управления подвеской по принципу "skyhook" в вертикальном направлении следующая:
FB=CskyB*dB
Величина управления подвеской по принципу "skyhook" в направлении крена следующая:
FR=CskyR*dR
Величина управления подвеской по принципу "skyhook" в направлении наклона следующая:
FP=CskyP*dP
Величина FB управления подвеской по принципу "skyhook" в вертикальном направлении.
Величина FB управления подвеской по принципу "skyhook" в вертикальном направлении вычисляется как часть величины управления ориентацией посредством двигателя в модуле 101a управления демпфированием вибрации подрессоренной массы и также вычисляется как часть величины управления ориентацией за счет использования S/A в модуле 33a управления подвеской по принципу "skyhook".
Величина FR управления подвеской по принципу "skyhook" в направлении крена.
Величина FR управления подвеской по принципу "skyhook" в направлении крена вычисляется как часть величины управления ориентацией за счет использования S/A в модуле 33a управления подвеской по принципу "skyhook".
Величина FP управления подвеской по принципу "skyhook" в направлении наклона.
Величина FP управления подвеской по принципу "skyhook" в направлении наклона вычисляется как часть величины управления ориентацией посредством двигателя в модуле 101a управления демпфированием вибрации подрессоренной массы, вычисляется как часть величины управления ориентацией посредством тормоза в модуле 201 управления подвеской по принципу "skyhook" и также вычисляется как часть величины управления ориентацией за счет использования S/A в модуле 33a управления подвеской по принципу "skyhook".
[0043] В модуле 101 управления ориентацией посредством двигателя, устанавливается предельное значение для ограничения величины управления крутящим моментом двигателя согласно величине управления ориентацией посредством двигателя, с тем чтобы не допускать дискомфорта для водителя. Таким образом, величина управления крутящим моментом двигателя, если преобразована в ускорение при движении вперед/назад, ограничивается пределами предписанного диапазона ускорения при движении вперед/назад. Следовательно, при вычислении величины управления ориентацией посредством двигателя (величина управления крутящим моментом двигателя на основе FB или FP), когда вычисляется значение, равное или превышающее предельное значение, величина управления ориентацией посредством двигателя выводится посредством величины управления подвеской по принципу "skyhook" для угловой скорости вертикального колебательного движения или угловой скорости движения наклона, достижимой при предельном значении. В модуле 102 управления двигателем величина управления крутящим моментом двигателя вычисляется на основе величины управления ориентацией посредством двигателя, соответствующей предельному значению, и выводится в двигатель 1.
[0044] В модуле 201 управления подвеской по принципу "skyhook", аналогично двигателю 1, устанавливается предельное значение для ограничения величины управления тормозным крутящим моментом, с тем чтобы не допускать дискомфорта для водителя (предельное значение подробно поясняется ниже). Таким образом, величина управления тормозным крутящим моментом, если преобразована в ускорение при движении вперед/назад, ограничивается пределами предписанного диапазона ускорения при движении вперед/назад (предельным значением, извлекаемым из дискомфорта пассажира, срока службы актуатора и т.п.). Следовательно, при вычислении величины управления ориентацией посредством тормоза на основе FP, когда вычисляется значение, равное или превышающее предельное значение, величина минимизации угловой скорости движения наклона (в дальнейшем обозначается как "величина управления ориентацией посредством тормоза"), достижимая при предельном значении, выводится в модуль 202 управления тормозом. В модуле 202 управления тормозом величина управления тормозным крутящим моментом вычисляется на основе величины управления ориентацией посредством тормоза, соответствующей предельному значению, и выводится в тормоза 20.
[0045] Управление движением наклона при торможении
Ниже описывается управление движением наклона при торможении. В общем, тормоза 20 допускают управление как вертикальным колебательным движением, так и движением наклона; в силу этого для них может считаться предпочтительным управлять обоими видами движения. Тем не менее, когда управление вертикальным колебательным движением выполняется посредством тормозов 20, тормозная сила формируется во всех четырех колесах одновременно, и даже в направлениях с низким приоритетом управления, имеется довольно сильное ощущение замедления относительно трудности при формировании регулирующего эффекта, и это зачастую вызывает у водителя дискомфорт. Таким образом, приспосабливается конфигурация, в которой управление движением наклона выполняется специальным способом посредством тормозов 20. Фиг. 8 является блок-схемой управления, показывающей управление движением наклона при торможении в первом варианте осуществления. При задании m в качестве массы кузова транспортного средства, BFf в качестве силы торможения передних колес, BFr в качестве силы торможения задних колес, Hcg в качестве высоты между центром тяжести транспортного средства и поверхностью дороги, a в качестве ускорения транспортного средства, Mp в качестве момента наклона и Vp в качестве угловой скорости движения наклона, следующие взаимосвязи являются истинными.
[0046] BFf+BFr=m*a
m*a*Hcg=Mp
Mp=(BFf+BFr)*Hcg
Если тормозная сила прикладывается, когда угловая скорость Vp наклона является положительной, т.е. когда сторона передних колес транспортного средства проседает, сторона передних колес должна дополнительно проседать, усиливая движение наклона; в силу этого тормозная сила не прикладывается в таких случаях. С другой стороны, когда угловая скорость Vp наклона является отрицательной, т.е. сторона передних колес транспортного средства поднимается, момент наклона при торможении прикладывает тормозную силу, минимизируя подъем на стороне передних колес. Это обеспечивает поле зрения для водителя, упрощая обзор перед собой и способствуя улучшенному восприятию безопасности и плоскости езды. Из вышеуказанного, применяются следующие величины управления:
когда Vp>0 (проседание передних колес), Mp=0
когда Vp≤0 (подъем передних колес), Mp=CskyP*Vp
Таким образом, тормозной крутящий момент формируется только тогда, когда передняя сторона транспортного средства поднимается, обеспечивая возможность ослабления чувства замедления, возникающего вследствие этого, по сравнению со случаем, когда тормозной крутящий момент формируется и когда передняя сторона поднимается, и когда она проседает. Помимо этого, рабочая частота актуаторов должна составлять только половину от обычной, что позволяет использовать недорогие актуаторы.
[0047] На основе взаимосвязей, описанных выше, модуль 334 вычисления величины управления ориентацией посредством тормоза состоит из следующих блоков управления. В модуле 3341 определения знака обработки в мертвой зоне определяется знак входной угловой скорости Vp наклона; когда знак является положительным, управление не требуется, так что 0 выводится в процессор 3342 уменьшения восприятия замедления, а когда знак является отрицательным, определяется, что управление является возможным, и сигнал угловой скорости наклона выводится в процессор 3342 уменьшения восприятия замедления.
[0048] ПРОЦЕСС ОСЛАБЛЕНИЯ ЧУВСТВА ЗАМЕДЛЕНИЯ
Далее описывается процесс ослабления чувства замедления. Этот процесс является процессом, который соответствует пределу, созданному посредством вышеуказанного предельного значения, которое задано в модуле 334 вычисления величины управления ориентацией посредством тормоза. Процессор 3342a возведения в квадрат возводит в квадрат сигнал угловой скорости наклона. Это меняет знак на обратный и сглаживает повышение управляющей силы. Модуль 3342b вычисления момента демпфирования квадрата угловой скорости наклона умножает возведенную в квадрат угловую скорость наклона на усиление CskyP подвески для члена наклона, который принимает во внимание процесс возведения в квадрат, и вычисляет момент Mp наклона. Модуль 3342c вычисления целевого замедления делит момент Mp наклона на массу m и высоту Hcg между центром тяжести транспортного средства и поверхностью дороги и вычисляет целевое замедление.
[0049] Модуль 3342d ограничения пороговых значений рывка определяет то, находится или нет темп изменения вычисленного целевого замедления, т.е. рывка, в предварительно установленных диапазонах для порогового значения рывка при замедлении и порогового значения рывка при отпускании педали тормоза, и находится или нет целевое замедление в диапазоне предельных значений ускорения при движении вперед/назад. Когда любое из пороговых значений превышается, целевое замедление корректируется до значения в диапазонах для пороговых значений рывка. Когда целевое замедление превышает предельное значение, оно задается в рамках предельного значения. За счет этого можно формировать темп замедления таким образом, что в результате не возникает дискомфорт у водителя.
[0050] Модуль 3343 преобразования целевого момента наклона умножает ограниченное целевое замедление, вычисленное посредством модуля 3342d ограничения пороговых значений рывка, на массу m и высоту Hcg и вычисляет целевой момент наклона, который выводится в модуль 2a управления тормозом.
[0051] МОДУЛЬ ЧАСТОТНО-ЧУВСТВИТЕЛЬНОГО УПРАВЛЕНИЯ
Далее описывается процесс частотно-чувствительного управления, выполняемый в модуле управления демпфированием вибрации подрессоренной массы. В первом варианте осуществления, по существу, скорость перемещения подрессоренной массы оценивается на основе значений, определенных посредством датчиков 5 скорости вращения колес, и управление подвеской по принципу "skyhook" выполняется на ее основе, чтобы за счет этого выполнять управление демпфированием вибрации подрессоренной массы. Тем не менее, возникают случаи, в которых, возможно, достаточная точность оценки из датчиков 5 скорости вращения колес не гарантируется, и случаи, в которых желательно активно гарантировать комфортное состояние вождения (т.е. мягкую езду, а не ощущение плоскости кузова транспортного средства) в зависимости от условий вождения или пожеланий водителя. В таких случаях, при векторном управлении, в котором взаимосвязь (фаза и т.д.) знаков скорости рабочего хода и скорости перемещения подрессоренной массы является важной, к примеру, в случае управления подвеской по принципу "skyhook", вследствие незначительных сдвигов фаз может оказаться затруднительным осуществлять надлежащее управление, и следовательно, вводится частотно-чувствительное управление, заключающее в себе управление демпфированием вибрации подрессоренной массы согласно скалярным величинам профиля вибрации.
[0052] Фиг. 9 является схемой, одновременно иллюстрирующей частотный профиль скорости вращения колес, определенный посредством датчика скорости вращения колес, и частотный профиль рабочего хода из датчика рабочего хода, не установленного в настоящем варианте осуществления. Здесь, "частотный профиль" означает профиль, в котором абсолютная величина амплитуды в зависимости от частоты проиллюстрирована на оси Y в качестве скалярной величины. Сравнение частотного компонента датчика 5 скорости вращения колес и частотного компонента датчика рабочего хода показывает то, что примерно аналогичные скалярные величины могут быть проиллюстрированы от компонента резонансной частоты подрессоренной массы до компонента резонансной частоты неподрессоренной массы. Таким образом, демпфирующая сила задана на основе этого частотного профиля, из значений, определенных посредством датчика 5 скорости вращения колес. Здесь, область, в которой находится компонент резонансной частоты подрессоренной массы, представляет собой частотную область, в которой пассажир имеет восприятие покачивания в воздух вследствие покачивания всего тела пассажира, или иначе говоря, такое восприятие, что снижено гравитационное ускорение, действующее на пассажира, и обозначается как область покачивания (0,5-3 Гц). Область между компонентом резонансной частоты подрессоренной массы и компонентом резонансной частоты неподрессоренной массы представляет собой частотную область, в которой хотя отсутствует восприятие уменьшенного гравитационного ускорения, имеется восприятие, напоминающее быстрое, частое вертикальное колебательное движение, испытываемое человеком на спине лошади при скачке рысью, или иначе говоря, восприятие вертикального возвратно-поступательного движения, которому может следовать все тело, и упоминается в качестве области вертикального колебательного движения (3-6 Гц). Область, в которой находится компонент резонансной частоты неподрессоренной массы, представляет собой частотную область, в которой хотя не испытывается вертикальное перемещение до такой степени, что ему следует масса тела, вибрация в виде подрагивания передается в часть тела пассажира, т.е. на бедренные кости, и упоминается в качестве области дрожания (6-23 Гц).
[0053] Фиг. 10 является блок-схемой управления, показывающей частотно-чувствительное управление при управлении демпфированием вибрации подрессоренной массы в первом варианте осуществления. Из значений датчика скорости вращения колес, полосовой режекторный фильтр 350 отсекает шум, за исключением компонента вибрации, используемого для того, чтобы осуществлять управление. Модуль 351 разделения предварительно определенной частотной области разделяет область на соответствующие полосы частот области покачивания, области вертикального колебательного движения и области дрожания. Процессор 352 преобразования Гильберта выполняет преобразование Гильберта для разделенных полос частот, преобразуя их в скалярные величины (в частности, в области, вычисленные с использованием амплитуды и полосы частот) на основе амплитуды частоты.
Модуль 353 взвешивания для вибрационной системы транспортного средства устанавливает весовые коэффициенты для фактического распространения вибрации на транспортное средство в полосах частот области покачивания, области вертикального колебательного движения и области дрожания. Модуль 354 взвешивания ощущений человека устанавливает весовые коэффициенты для распространения вибрации пассажирам в полосах частот области покачивания, области вертикального колебательного движения и области дрожания.
[0054] Ниже описывается установление весовых коэффициентов ощущений человека. Фиг. 11 является графиком корреляции, показывающим профиль ощущений человека, проиллюстрированный в зависимости от частоты. Как показано на фиг. 11, чувствительность пассажира к частотам является сравнительно низкой в области покачивания, которая представляет собой низкочастотную область с чувствительностью, постепенно увеличивающейся во время перехода в области более высокой частоты. Частоты в высокочастотных областях в пределах и выше области дрожания постепенно все труднее передавать пассажиру. С учетом этого, весовой коэффициент Wf ощущений человека в области покачивания задается равным 0,17, весовой коэффициент Wh ощущений человека в области вертикального колебательного движения задается равным 0,34, что выше Wf, и весовой коэффициент Wb ощущений человека в области дрожания задается равным 0,38, что выше Wf и Wh. За счет этого можно увеличивать корреляцию между скалярными величинами различных полос частот и вибрацией, фактически распространяемой пассажирам. Эти два весовых коэффициента могут быть модифицированы надлежащим образом согласно концепции транспортного средства или предпочтениям пассажиров.
[0055] Из весовых коэффициентов полос частот средство 355 определения весовых коэффициентов вычисляет пропорции, занимаемые посредством весового коэффициента для каждой из полос частот. При задании a в качестве весового коэффициента области покачивания, b в качестве весового коэффициента области вертикального колебательного движения и c в качестве весового коэффициента области дрожания, весовой коэффициент для области покачивания составляет (a/(a+b+c)), весовой коэффициент для области вертикального колебательного движения составляет (b/(a+b+c)), а весовой коэффициент для области дрожания составляет (c/(a+b+c)).
Модуль 356 вычисления скалярных величин умножает скалярные величины полос частот, вычисленные посредством процессора 352 преобразования Гильберта, на весовые коэффициенты, вычисленные в средстве 355 определения весовых коэффициентов, и выводит конечные скалярные величины. Процесс до этого момента выполняется для значений датчика скорости вращения колес для каждого из колес.
[0056] Модуль 357 выбора максимальных значений выбирает максимальное значение из конечных скалярных величин, вычисленных для каждого из четырех колес. Значение 0,01, возникающее в самом низу, устанавливается для того, чтобы не допускать наличия 0 в качестве знаменателя, поскольку сумма максимальных значений используется в качестве знаменателя в последующем процессе. Модуль 358 вычисления пропорций вычисляет пропорцию с использованием суммы максимальных значений скалярных величин для каждой из полос частот в качестве знаменателя и максимального значения скалярной величины полосы частот, соответствующей области покачивания, в качестве числителя. Другими словами, вычисляется пропорция "засоренности" (далее просто "пропорция") в области покачивания, содержащейся во всех компонентах вибрации. Фильтр 359 резонанса подрессоренной массы выполняет процесс фильтрации, имеющий резонансную частоту подрессоренной массы примерно в 1,2 Гц, для вычисленной пропорции, и извлекает из вычисленной пропорции компонент полосы резонансных частот подрессоренной массы, представляющий область покачивания. Другими словами, поскольку область покачивания существует приблизительно при 1,2 Гц, считается, что пропорция этой области также должна варьироваться приблизительно при 1,2 Гц. Конечная извлеченная пропорция затем выводится в модуль 35 управления демпфирующей силой, и выводится величина частотно-чувствительного управления демпфирующей силой в соответствии с пропорцией.
[0057] Фиг. 12 является графиком, показывающим взаимосвязь между демпфирующей силой и пропорцией "засоренности" вибрации области покачивания, сформированную посредством частотно-чувствительного управления в первом варианте осуществления. Как показано на фиг. 12, высокий уровень демпфирующей силы устанавливается, когда область покачивания занимает значительную пропорцию, за счет этого уменьшая уровень вибрации резонанса подрессоренной массы. Даже когда устанавливается высокая демпфирующая сила, поскольку пропорции области вертикального колебательного движения и области дрожания являются небольшими, высокочастотная вибрация или упругая вертикальная вибрация не передается пассажирам. Между тем, установление низкого уровня демпфирующей силы, когда пропорция области покачивания является небольшой, уменьшает профиль передачи вибрации при и выше резонанса подрессоренной массы, минимизируя высокочастотную вибрацию и обеспечивая в результате плавную езду.
[0058] Ниже описываются преимущества частотно-чувствительного управления по сравнению с частотно-чувствительным управлением и управлением подвеской по принципу "skyhook". Фиг. 13 является схемой, показывающей частотный профиль скорости вращения колес, определенный посредством датчика 5 скорости вращения колес при определенных условиях вождения. Этот профиль, в частности, наблюдается во время вождения на поверхности дороги, имеющей непрерывные небольшие неровности, к примеру, щебень. Когда управление подвеской по принципу "skyhook" выполняется при вождении на поверхности дороги, демонстрирующей этот профиль, возникает такая проблема, что поскольку при управлении подвеской по принципу "skyhook" демпфирующая сила определяется из значения пиковой амплитуды, ухудшения оценки фазы для высокочастотного вибрационного ввода вызывают установление чрезвычайно высокой демпфирующей силы в некорректное время, что приводит к усилению высокочастотной вибрации.
В отличие от этого, если управление выполняется на основе скалярных величин, а не векторов, как при частотно-чувствительном управлении, область покачивания занимает небольшую пропорцию на поверхности дороги, как показано на фиг. 13, что приводит к установлению низкой демпфирующей силы. Таким образом, даже если амплитуда вибрации в области дрожания является высокой, профиль передачи вибрации уменьшается в достаточной степени, обеспечивая возможность недопущения усиления высокочастотной вибрации. Как показано выше, высокочастотная вибрация может быть минимизирована через частотно-чувствительное управление на основе скалярных величин в областях, в которых управление затруднено вследствие сниженной точности оценки фазы, даже если управление подвеской по принципу "skyhook" выполняется с использованием дорогих датчиков.
[0059] МОДУЛЬ УПРАВЛЕНИЯ ВХОДНЫМИ ВОЗДЕЙСТВИЯМИ ОТ ВОДИТЕЛЯ В S/A
Далее описывается модуль управления входными воздействиями от водителя в S/A. В модуле 31 управления входными воздействиями от водителя в S/A, на основе сигналов из датчика 7 угла поворота при рулении и датчика 8 скорости транспортного средства, величина управления демпфирующей силой при входных воздействиях от водителя, соответствующая поведению транспортного средства, которого хочет достигать водитель, вычисляется и выводится в модуль 35 управления демпфирующей силой. Например, когда носовой конец транспортного средства поднимается во время операции ускорения водителя, поле зрения водителя зачастую отклоняется от поверхности дороги, и следовательно, в этом случае, демпфирующая сила для четырех колес выводится в качестве величины управления демпфирующей силой при входных воздействиях от водителя, с тем чтобы не допускать подъема носовой части. Дополнительно, выводится величина управления демпфирующей силой при входных воздействиях от водителя для минимизации крена, возникающего во время поворачивания.
[0060] УПРАВЛЕНИЕ КРЕНОМ ЧЕРЕЗ УПРАВЛЕНИЕ ВХОДНЫМИ ВОЗДЕЙСТВИЯМИ ОТ ВОДИТЕЛЯ НА СТОРОНЕ S/A
Здесь описывается управление для того, чтобы минимизировать крен, выполняемое через управление входными воздействиями от водителя на стороне S/A. Фиг. 14 является блок-схемой управления, показывающей конфигурацию управления минимизацией угловой скорости крена в первом варианте осуществления. В модуле 31b1 оценки поперечного ускорения, поперечное ускорение Yg оценивается на основе угла σf поворота при рулении передними колесами, определенного посредством датчика 7 угла поворота при рулении, угла σr поворота при рулении задними колесами (фактического угла поворота при рулении задними колесами, когда предоставляется устройство рулевого управления задними колесами; в противном случае равен нулю) и скорости VSP транспортного средства, определенной посредством датчика 8 скорости транспортного средства. Это поперечное ускорение Yg вычисляется из следующей формулы с использованием оцененного значения γ угловой скорости рысканья.
Yg=VSP*γ
Оцененное значение γ угловой скорости рысканья вычисляется из следующей формулы.

Здесь:

Угол β скольжения кузова
Скорость γ рысканья кузова
Угол σf поворота при рулении передними колесами
Угол σr поворота при рулении задними колесами
Кузов V
CP Ktf передних колес
CP Ktv задних колес
Расстояние Lf передних колес от центра тяжести
Расстояние Lr задних колес от центра тяжести
Масса M кузова
[0061] В модуле 31b2 создания компонента опережения по фазе на 90° различается оцененное поперечное ускорение Yg, и выводится значение dYg дифференцирования поперечного ускорения. В модуле 31b3 создания компонента отставания по фазе на 90° выводится компонент F(dYg), в котором фаза значения дифференцирования поперечного ускорения отстает на 90°. Компонент F(dYg) восстанавливает фазу компонента, в котором низкочастотная область исключена посредством модуля 31b2 создания компонента опережения по фазе на 90°, в фазу поперечного ускорения Yg и представляет компонент DC-среза поперечного ускорения Yg, т.е. переходный компонент поперечного ускорения Yg. В модуле 31b4 создания компонента отставания по фазе на 90°, выводится компонент F(Yg), в котором фаза оцененного поперечного ускорения Yg отстает на 90°. В модуле 31b5 умножения на усиление поперечное ускорение Yg, значение dYg дифференцирования поперечного ускорения, компонент F(dYg) DC-среза поперечного ускорения и компонент F(Yg) отставания по фазе на 90°, соответственно, умножаются на усиление. Каждое усиление устанавливается на основе коэффициента передачи угловой скорости крена для угла поворота при рулении. Кроме того, каждое усиление может регулироваться согласно четырем режимам управления, поясненным ниже. В модуле 31b6 вычисления возведения в квадрат, возводятся в квадрат и выводятся компоненты, умноженные на усиление. В модуле 31b7 синтеза, суммируются значения, выводимые посредством модуля 31b6 вычисления возведения в квадрат. В модуле 31b8 умножения на усиление, умножаются на усиление и выводятся возведенные в квадрат значения суммированных компонентов. В модуле 31b9 вычисления квадратного корня, вычисляется квадратный корень значения, выводимого посредством модуля 31b7 умножения на усиление, чтобы за счет этого вычислять величину управления ориентацией на основе входных воздействий от водителя для целей управления минимизацией угловой скорости крена, которая выводится в модуль 35 управления демпфирующей силой.
Модуль 31b2 создания компонента опережения по фазе на 90°, модуль 31b3 создания компонента отставания по фазе на 90°, модуль 31b4 создания компонента отставания по фазе на 90°, модуль 31b5 умножения на усиление, модуль 31b6 вычисления возведения в квадрат, модуль 31b7 синтеза, модуль 31b8 умножения на усиление и модуль 31b9 вычисления квадратного корня соответствуют модулю 31b10 преобразования Гильберта, который использует преобразование Гильберта для того, чтобы формировать форму сигнала огибающей.
[0062] Фиг. 15 является временной диаграммой, показывающей процесс формирования формы сигнала огибающей для управления минимизацией угловой скорости крена в первом варианте осуществления.
Когда руление инициируется водителем во время t1, начинает формироваться угловая скорость крена. В это время, посредством формирования формы сигнала огибающей через добавление компонента опережения по фазе на 90° dYg и вычисления величины управления ориентацией на основе входных воздействий от водителя на основе скалярной величины на основе формы сигнала огибающей, может минимизироваться формирование угловой скорости крена в начальной фазе руления. Дополнительно, посредством формирования формы сигнала огибающей через добавление компонента F(dYg) DC-среза поперечного ускорения, может минимизироваться эффективно угловая скорость крена, сформированная в переходном состоянии во время инициирования или завершения руления водителем. Другими словами, в установившемся состоянии поворачивания, в котором формируется постоянный крен, демпфирующая сила не увеличивается чрезмерно, и не допускается ухудшенный комфорт во время езды.
Затем, когда водитель переходит в состояние руления во время t2, компонент опережения по фазе на 90° dYg и компонент F(dYg) DC-среза поперечного ускорения исчезают, и теперь добавляется компонент F(Yg) отставания по фазе на 90°. В это время, даже в случае, если фактически нет большого изменения угловой скорости крена в установившемся состоянии поворачивания, после начального крена формируется компонент резонанса угловой скорости крена, который соответствует "отдаче" по крену. Если не добавлен компонент F(Yg) отставания по фазе, демпфирующая сила должна задаваться равной небольшому значению от времени t2 до времени t3, вызывая риск нарушения устойчивости поведения транспортного средства посредством компонента резонанса угловой скорости крена. Компонент F(Yg) отставания по фазе на 90° способствует минимизации этого компонента резонанса угловой скорости крена.
[0063] Когда водитель переходит от состояния руления к движению вперед по прямой во время t3, поперечное ускорение Yg становится меньше, и угловая скорость крена также сходится на небольшом значении. Здесь, поскольку демпфирующая сила жестко обеспечена через действие компонента F(Yg) отставания по фазе на 90, может не допускаться нарушение устойчивости поведения транспортного средства вследствие компонента резонанса угловой скорости крена.
[0064] МОДУЛЬ УПРАВЛЕНИЯ ДЕМПФИРОВАНИЕМ ВИБРАЦИИ НЕПОДРЕССОРЕННОЙ МАССЫ
Далее описывается конфигурация модуля управления демпфированием вибрации неподрессоренной массы. Как пояснено в контексте традиционного транспортного средства, показанного на фиг. 7(a), полоса резонансных частот также присутствует в шинах, поскольку они обладают как модулем упругости, так и коэффициентом демпфирования. Тем не менее, поскольку шина имеет массу, которая меньше массы подрессоренной массы, а также высокий модуль упругости, полоса частот присутствует в высокочастотном крае резонанса подрессоренной массы. Этот компонент резонанса неподрессоренной массы вызывает подрагивание шин в неподрессоренной массе, потенциально ухудшая контакт с землей. Помимо этого, подрагивание в неподрессоренной массе может быть некомфортным для пассажиров. Таким образом, демпфирующая сила устанавливается в ответ на компонент резонанса неподрессоренной массы, чтобы минимизировать вызываемое резонансом неподрессоренной массы подрагивание.
[0065] Фиг. 16 является блок-схемой, показывающей конфигурацию управления для управления демпфированием вибрации неподрессоренной массы в первом варианте осуществления. Модуль 341 извлечения компонента резонанса неподрессоренной массы применяет полосовой фильтр к флуктуациям скорости вращения колес, выводимым из модуля 321b вычисления отклонения в модуле 32 оценки состояния вождения, чтобы извлекать компонент резонанса неподрессоренной массы. Компонент резонанса неподрессоренной массы извлекается из области примерно в 10-20 Гц в частотном компоненте скорости вращения колес. Модуль 342 формирования формы сигнала огибающей скаляризует извлеченный компонент резонанса неподрессоренной массы и с использованием фильтра огибающей формирует форму сигнала огибающей. Модуль 343 умножения на усиление умножает скаляризованный компонент резонанса неподрессоренной массы на усиление и вычисляет величину управления демпфирующей силой вибрации неподрессоренной массы, которая выводится в модуль 35 управления демпфирующей силой. В первом варианте осуществления, компонент резонанса неподрессоренной массы извлекается посредством применения полосового фильтра к флуктуациям скорости вращения колес, выводимым из модуля 321b вычисления отклонения модуля 32 оценки состояния вождения, но также приемлемо применять полосовой фильтр к значениям, определенным посредством датчиков скорости вращения колес, чтобы извлекать компонент резонанса неподрессоренной массы, либо для модуля 32 оценки состояния вождения оценивать скорость неподрессоренной массы вместе со скоростью перемещения подрессоренной массы и извлекать компонент резонанса неподрессоренной массы.
[0066] КОНФИГУРАЦИЯ МОДУЛЯ УПРАВЛЕНИЯ ДЕМПФИРУЮЩЕЙ СИЛОЙ
Далее описывается конфигурация модуля 35 управления демпфирующей силой. Фиг. 17 является блок-схемой управления, показывающей конфигурацию управления для модуля управления демпфирующей силой первого варианта осуществления. Величина управления демпфирующей силой при входных воздействиях от водителя, выводимая из модуля 31 управления входными воздействиями от водителя, величина управления ориентацией за счет использования S/A, выводимая из модуля 33a управления подвеской по принципу "skyhook", величина частотно-чувствительного управления демпфирующей силой, выводимая из модуля 33b частотно-чувствительного управления, величина управления демпфирующей силой вибрации неподрессоренной массы, выводимая из модуля 34 управления демпфированием вибрации неподрессоренной массы, и скорость рабочего хода, вычисленная посредством модуля 32 оценки состояния вождения, вводятся в модуль 35a преобразования коэффициента эквивалентного демпфирования за счет вязкого трения, который преобразует эти значения в коэффициент эквивалентного демпфирования за счет вязкого трения.
[0067] Из коэффициентов демпфирования, преобразованных посредством модуля 35a преобразования коэффициента эквивалентного демпфирования за счет вязкого трения (далее обозначаемых, соответственно, как коэффициент k1 демпфирования входных воздействий от водителя, коэффициент k2 демпфирования ориентации за счет использования S/A, частотно-чувствительный коэффициент k3 демпфирования и коэффициент k4 демпфирования вибрации неподрессоренной массы), модуль 35b согласования коэффициентов демпфирования согласует то, какие коэффициенты демпфирования должны быть использованы в качестве основы для управления, и выводит конечный коэффициент демпфирования. Модуль 35c преобразования управляющих сигналов преобразует управляющий сигнал (значение управляющего тока), которое должно отправляться в S/A 3, причем осуществляет это на основе скорости рабочего хода и коэффициента демпфирования, согласованных посредством модуля 35b согласования коэффициентов демпфирования, и выводит сигнал в S/A 3.
[0068] МОДУЛЬ СОГЛАСОВАНИЯ КОЭФФИЦИЕНТОВ ДЕМПФИРОВАНИЯ
Далее описываются подробности согласования, выполняемого посредством модуля 35b согласования коэффициентов демпфирования. Устройство управления транспортного средства первого варианта осуществления имеет четыре режима управления. Первым является стандартный режим, который представляет собой состояние, в котором подходящее состояние поворачивания может быть получено во время вождения на типичных городских улицах и т.п. Вторым является спортивный режим, который представляет собой состояние, в котором устойчивое состояние поворачивания может быть получено при агрессивной езде вдоль извилистой дороги и т.п. Третьим является комфортный режим, который представляет собой состояние, в котором приоритет предоставляется комфорту во время езды, к примеру, при приведении в движение на низкой скорости транспортного средства. Четвертым является режим движения по шоссе, который представляет собой состояние вождения на высоких скоростях транспортного средства на автостраде и т.п. с многочисленными прямыми участками.
[0069] В стандартном режиме, управление выполняется при предоставлении приоритета управлению демпфированием вибрации неподрессоренной массы посредством модуля 34 управления демпфированием вибрации неподрессоренной массы, в то время как управление подвеской по принципу "skyhook" выполняется посредством модуля 33a управления подвеской по принципу "skyhook".
В спортивном режиме, выполняются управление подвеской по принципу "skyhook" посредством модуля 33a управления подвеской по принципу "skyhook" и управление демпфированием вибрации неподрессоренной массы посредством модуля 34 управления демпфированием вибрации неподрессоренной массы, при предоставлении приоритета управлению входными воздействиями от водителя посредством модуля 31 управления входными воздействиями от водителя.
В комфортном режиме, управление выполняется при предоставлении приоритета управлению демпфированием вибрации неподрессоренной массы посредством модуля 34 управления демпфированием вибрации неподрессоренной массы, в то время как частотно-чувствительное управление выполняется посредством модуля 33b частотно-чувствительного управления.
В режиме движения по шоссе, управление выполняется при добавлении величины управления для управления демпфированием вибрации неподрессоренной массы посредством модуля 34 управления демпфированием вибрации неподрессоренной массы к управлению подвеской по принципу "skyhook", выполняемому посредством модуля 33a управления подвеской по принципу "skyhook", также при предоставлении приоритета управлению входными воздействиями от водителя, выполняемому посредством модуля 31 управления входными воздействиями от водителя.
Ниже описывается согласование коэффициентов демпфирования в каждом из этих режимов.
[0070] СОГЛАСОВАНИЕ В СТАНДАРТНОМ РЕЖИМЕ
Фиг. 18 является блок-схемой последовательности операций способа, показывающей процесс согласования коэффициентов демпфирования, выполняемый в стандартном режиме в первом варианте осуществления.
На этапе S1, выполняется определение в отношении того, превышает коэффициент k2 демпфирования ориентации за счет использования S/A или нет коэффициент k4 демпфирования вибрации неподрессоренной массы, и когда это имеет место, процесс переходит к этапу S4, на котором k2 задается в качестве коэффициента демпфирования.
На этапе S2 пропорция скалярных величин для области дрожания вычисляется на основе скалярных величин области покачивания, области вертикального колебательного движения и области дрожания, описанных в контексте модуля 33b частотно-чувствительного управления.
На этапе S3, выполняется определение в отношении того, равна или превышает либо нет пропорция области дрожания предварительно определенное значение, когда это имеет место, процесс переходит к этапу S4, на котором низкое значение k2 устанавливается в качестве коэффициента демпфирования, касательно такой проблемы, что высокочастотная вибрация будет ухудшать комфорт во время езды. С другой стороны, в случаях, в которых пропорция области дрожания меньше предварительно определенного значения, нет оснований для такой проблемы, что высокочастотная вибрация должна ухудшать комфорт во время езды, даже если устанавливается высокий коэффициент демпфирования, и следовательно, процесс переходит к этапу S5, на котором k4 задается в качестве коэффициента.
[0071] В стандартном режиме, как пояснено выше, в качестве общего правила, приоритет предоставляется управлению демпфированием вибрации неподрессоренной массы, которое минимизирует резонанс в неподрессоренной массе. Тем не менее, когда демпфирующая сила, требуемая для управления подвеской по принципу "skyhook", меньше демпфирующей силы, требуемой для управления демпфированием вибрации неподрессоренной массы, и кроме того, пропорция области дрожания является большой, демпфирующая сила для управления подвеской по принципу "skyhook" устанавливается таким образом, чтобы не допускать усиления профиля высокочастотной вибрации, ассоциированного с удовлетворением требованиям по управлению демпфированием вибрации неподрессоренной массы. Это дает возможность получения оптимального профиля демпфирования согласно состоянию вождения, за счет этого не допуская вызываемого высокочастотной вибрацией ухудшения комфорта во время езды при одновременном достижении ощущения плоскости кузова транспортного средства.
[0072] СОГЛАСОВАНИЕ В СПОРТИВНОМ РЕЖИМЕ
Фиг. 19 является блок-схемой последовательности операций способа, показывающей процесс согласования коэффициентов демпфирования, выполняемый во время спортивного режима в первом варианте осуществления.
На этапе S11 коэффициенты распределения демпфирующей силы для четырех колес вычисляются на основе коэффициентов k1 демпфирования входных воздействий от водителя для четырех колес, устанавливаемых через управление входными воздействиями от водителя. При задании k1fr в качестве коэффициента демпфирования входных воздействий от водителя переднего правого колеса, k1fl в качестве коэффициента демпфирования входных воздействий от водителя переднего левого колеса, k1rr в качестве коэффициента демпфирования входных воздействий от водителя заднего правого колеса, k1rl в качестве коэффициента демпфирования входных воздействий от водителя заднего левого колеса и xfr, xfl, xrr и xrl в качестве коэффициентов распределения демпфирующей силы для каждого из колес, коэффициенты распределения вычисляются следующим образом:
xfr=k1fr/(k1fr+k1fl+k1rr+k1rl)
xfl=k1fl/(k1fr+k1fl+k1rr+k1rl)
xrr=k1rr/(k1fr+k1fl+k1rr+k1rl)
xrl=k1rl/(k1fr+k1fl+k1rr+k1rl)
[0073] На этапе S12, выполняется определение в отношении того, находится или нет и коэффициент x распределения демпфирующей силы в предварительно определенном диапазоне (больше α и меньше β), и когда это имеет место, выполняется определение того, что распределение практически равно для всех колес, и процесс переходит к этапу S13; но если даже один коэффициент находится за пределами предварительно определенного диапазона, процесс переходит к этапу S16.
На этапе S13, выполняется определение в отношении того, превышает коэффициент k4 демпфирования вибрации неподрессоренной массы или нет коэффициент k1 демпфирования входных воздействий от водителя, и когда это имеет место, процесс переходит к этапу S15, на котором k4 задается в качестве первого коэффициента k демпфирования. С другой стороны, когда коэффициент k4 демпфирования вибрации неподрессоренной массы равен или меньше коэффициента k1 демпфирования входных воздействий от водителя, процесс переходит к этапу S14, на котором k1 задается в качестве первого коэффициента k демпфирования.
[0074] На этапе S16, выполняется определение в отношении того, равен или нет коэффициент k4 демпфирования вибрации неподрессоренной массы максимальному значению max, устанавливаемому для S/A 3; и когда имеет место то, что он равен максимальному значению max, процесс переходит к этапу S17, либо если это не имеет место, процесс переходит к этапу S18.
На этапе S17 такой коэффициент демпфирующей силы, при котором максимальное значение коэффициентов k1 демпфирования входных воздействий от водителя для четырех колес равно коэффициенту k4 демпфирования вибрации неподрессоренной массы, и который удовлетворяет коэффициенту распределения демпфирующей силы, вычисляется как первый коэффициент k демпфирования. Другими словами, вычисляется значение, которое увеличивает коэффициент демпфирования до максимума при удовлетворении коэффициенту распределения демпфирующей силы.
На этапе S18, вычисляется коэффициент демпфирования, который удовлетворяет коэффициенту распределения демпфирующей силы в диапазоне, в котором коэффициент k1 демпфирования входных воздействий от водителя для каждого из четырех колес равен или превышает k4. Другими словами, вычисляется значение, которое удовлетворяет коэффициенту распределения демпфирующей силы, устанавливаемому через управление входными воздействиями от водителя, и которое удовлетворяет требованиям в конце управления демпфированием вибрации неподрессоренной массы.
[0075] На этапе S19, выполняется определение в отношении того, меньше или нет первые коэффициенты k демпфирования, заданные на вышеуказанных этапах, коэффициента k2 демпфирования ориентации за счет использования S/A, устанавливаемого через управление подвеской по принципу "skyhook"; в случае определения того, что меньше, коэффициент демпфирования, требуемый на стороне управления подвеской по принципу "skyhook", больше, и следовательно, процесс переходит к этапу S20, и задается k2. С другой стороны, если k равен или превышает k2, задается k, и процесс переходит к этапу S21, и задается k.
[0076] В спортивном режиме, как пояснено выше, в качестве общего правила, приоритет предоставляется управлению демпфированием вибрации неподрессоренной массы, которое минимизирует резонанс неподрессоренной массы. Тем не менее, поскольку коэффициент распределения демпфирующей силы, требуемый со стороны управления входными воздействиями от водителя, тесно связан с ориентацией кузова транспортного средства и, в частности, глубоко связан с изменением линии прямой видимости водителя вследствие режима крена, по сути, предельный приоритет предоставляется обеспечению коэффициента распределения демпфирующей силы, а не коэффициента демпфирования, требуемого со стороны управления входными воздействиями от водителя. Для движения, которое вызывает изменение ориентации кузова транспортного средства в состоянии, в котором поддерживается коэффициент распределения демпфирующей силы, устойчивая ориентация кузова транспортного средства может сохраняться через выбор "высокого уровня" для управления подвеской по принципу "skyhook".
[0077] СОГЛАСОВАНИЕ В КОМФОРТНОМ РЕЖИМЕ
Фиг. 20 является блок-схемой последовательности операций способа, показывающей процесс согласования коэффициентов демпфирования, выполняемый во время комфортного режима в первом варианте осуществления.
На этапе S30, выполняется определение в отношении того, превышает частотно-чувствительный коэффициент k3 демпфирования или нет коэффициент k4 демпфирования вибрации неподрессоренной массы, и в случае определения того, что превышает, процесс переходит к этапу S32, на котором задается частотно-чувствительный коэффициент k3 демпфирования. С другой стороны, в случае определения того, что частотно-чувствительный коэффициент k3 демпфирования равен или меньше коэффициента k4 демпфирования вибрации неподрессоренной массы, процесс переходит к этапу S32, на котором задается коэффициент k4 демпфирования вибрации неподрессоренной массы.
[0078] В комфортном режиме, как пояснено выше, по существу, приоритет предоставляется управлению демпфированием резонанса неподрессоренной массы, чтобы минимизировать резонанс неподрессоренной массы. Поскольку сначала частотно-чувствительное управление выполняется в качестве управления демпфированием вибрации подрессоренной массы, за счет этого устанавливая оптимальный коэффициент демпфирования согласно состояниям поверхности дороги, может выполняться управление для того, чтобы обеспечивать комфорт во время езды, и ощущение недостаточного контакта с землей вследствие дрожания неподрессоренной массы может не допускаться через управление демпфированием вибрации неподрессоренной массы. В комфортном режиме, аналогично стандартному режиму, допустимо переключение коэффициента демпфирования согласно пропорции дрожания в частотной скалярной величине. Это обеспечивает возможность сверхкомфортного режима, в котором лучше обеспечивается комфорт во время езды.
[0079] СОГЛАСОВАНИЕ В РЕЖИМЕ ДВИЖЕНИЯ ПО ШОССЕ
Фиг. 21 является блок-схемой последовательности операций способа, показывающей процесс согласования коэффициентов демпфирования, выполняемый во время режима движения по шоссе в первом варианте осуществления. Процесс согласования на этапах S11-S18 является идентичным процессу согласования в спортивном режиме, и следовательно, его описание опускается.
На этапе S40, коэффициент k2 демпфирования ориентации за счет использования S/A, предоставленный посредством управления подвеской по принципу "skyhook", суммируется с согласованным первым коэффициентом k демпфирования, предоставленным посредством процесса вплоть до этапа S18, и выводится коэффициент.
[0080] В режиме движения по шоссе, как пояснено выше, значение, полученное посредством суммирования коэффициента k2 демпфирования ориентации за счет использования S/A с согласованным первым коэффициентом k демпфирования, используется при согласовании коэффициента демпфирования. Эта операция описывается ниже со ссылкой на чертежи. Фиг. 22 является временной диаграммой, показывающей изменение коэффициента демпфирования во время вождения на поверхности дороги с подъемом и поверхности ухабистой дороги. Например, при попытке минимизировать движение, обуславливающее поперечное колебательное движение кузова транспортного средства вследствие эффектов небольшого подъема на поверхности дороги во время вождения на высокой скорости транспортного средства, если предпринимается попытка добиваться этого только через управление подвеской по принципу "skyhook", необходимо определять незначительные флуктуации в скорости вращения колес, что требует установления сравнительно высокого усиления управления подвеской по принципу "skyhook". В таких случаях, может минимизироваться поперечное колебательное движение, но когда имеются ухабы и т.п. на поверхности дороги, возникает риск того, что коэффициент усиления системы управления является слишком большим, что приводит к чрезмерно высокому коэффициенту усиления системы управления и чрезмерному управлению демпфирующей силой. Это обуславливает проблемы ухудшенного комфорта во время езды или ориентации кузова транспортного средства.
[0081] В отличие от этого, поскольку первый коэффициент k демпфирования постоянно задается аналогично режиму движения по шоссе, данный уровень демпфирующей силы может постоянно обеспечиваться, и поперечное колебательное движение кузова транспортного средства может минимизироваться, даже когда коэффициент демпфирования, сформированный через управление подвеской по принципу "skyhook", является низким. Дополнительно, поскольку нет необходимости повышать коэффициент усиления управления подвеской по принципу "skyhook", с ухабами на поверхности дороги можно справляться надлежащим образом через обычный коэффициент усиления системы управления. Кроме того, поскольку управление подвеской по принципу "skyhook" выполняется в состоянии, в котором коэффициент k демпфирования установлен, в отличие от случая предела по коэффициенту демпфирования, операция согласно этапу уменьшения коэффициента демпфирования является возможной в области полуактивного управления, обеспечивая устойчивую ориентацию транспортного средства во время вождения на высокой скорости.
[0082] ПРОЦЕСС ВЫБОРА РЕЖИМА
Далее описывается процесс выбора режима для выбора вышеуказанных режимов вождения. Фиг. 23 является блок-схемой последовательности операций способа, показывающей процесс выбора режима на основе состояния вождения, выполняемый посредством модуля согласования коэффициентов демпфирования первого варианта осуществления.
На этапе S50, на основе значения из датчика 7 угла поворота при рулении, выполняется определение в отношении того, существует или нет состояние движения вперед по прямой, и если определяется то, что состояние движения вперед по прямой существует, процесс переходит к этапу S51, тогда как в случае определения того, что существует состояние поворачивания, процесс переходит к этапу S54.
На этапе S51, на основе значения из датчика 8 скорости транспортного средства, выполняется определение в отношении того, достигнута или превышена либо нет предварительно определенная скорость VSP1 транспортного средства, указывающая состояние высокой скорости транспортного средства, и в случае определения того, что VSP1 достигнута или превышена, процесс переходит к этапу S52, и выбирается стандартный режим. С другой стороны, в случае определения того, что скорость меньше VSP1, процесс переходит к этапу S53, и выбирается комфортный режим.
На этапе S54, на основе значения из датчика 8 скорости транспортного средства, выполняется определение в отношении того, достигнута или превышена либо нет предварительно определенная скорость VSP1 транспортного средства, указывающая состояние высокой скорости транспортного средства, и в случае определения того, что VSP1 достигнута или превышена, процесс переходит к этапу S55, и выбирается режим движения по шоссе. С другой стороны, в случае определения того, что скорость меньше VSP1, процесс переходит к этапу S56, и выбирается спортивный режим.
[0083] Иными словами, стандартный режим выбирается во время вождения на высокой скорости транспортного средства при движении вперед по прямой, в силу этого позволяя обеспечивать устойчивость ориентации кузова транспортного средства через управление подвеской по принципу "skyhook", обеспечивать комфорт во время езды посредством минимизации вызываемого высокочастотной вибрацией вертикального колебательного движения или дрожания и минимизации резонанса в неподрессоренной массе. Выбор комфортного режима во время вождения на низких скоростях позволяет минимизировать резонанс в неподрессоренной массе при минимизации передачи вибрации, к примеру, вертикального колебательного движения или дрожания, пассажирам.
[0084] Между тем, режим движения по шоссе выбирается во время вождения на высокой скорости транспортного средства в состоянии поворачивания, за счет этого осуществляя управление с использованием значения, в котором прибавлен коэффициент демпфирования; в силу этого в результате, как правило, получается высокая демпфирующая сила. Таким образом, можно минимизировать резонанс неподрессоренной массы при активном обеспечении резонанса неподрессоренной массы во время поворота через управление входными воздействиями от водителя, даже при движении на высокой скорости транспортного средства. Выбор спортивного режима во время вождения на низкой скорости транспортного средства дает возможность минимизации резонанса неподрессоренной массы при активном обеспечении ориентации кузова транспортного средства во время поворота через управление входными воздействиями от водителя и выполнении управления подвеской по принципу "skyhook" надлежащим образом, в силу этого обеспечивая вождение с устойчивой ориентацией транспортного средства.
[0085] В первом варианте осуществления, представлен пример процесса выбора режима, в котором определяется состояние вождения, и автоматически переключается режим, но также можно предоставлять переключатель режима и т.п., который может управляться водителем таким образом, чтобы выбирать режим вождения. Это дает в результате комфорт во время езды и поворачиваемость, совпадающие с требуемым состоянием вождения водителя.
[0086] СНИЖЕНИЕ ТОЧНОСТИ ОЦЕНКИ
Далее описывается снижение точности оценки. Как упомянуто выше, в первом варианте осуществления, в каждом из модулей 100, 200, 32 оценки состояния вождения, скорость рабочего хода, угловая скорость вертикального колебательного движения, угловая скорость крена и угловая скорость наклона для использования при управлении подвеской по принципу "skyhook" посредством модуля 101a или 33 управления демпфированием подрессоренной массы или посредством модуля 201 управления подвеской по принципу "skyhook" оцениваются для каждого колеса, причем это осуществляется на основе скорости вращения колес, определенной посредством датчиков 5 скорости вращения колес. Тем не менее, могут быть предусмотрены сценарии, в которых во время оценки скорости рабочего хода или состояния подрессоренной массы из скорости вращения колес, точность оценки понижается по любой из различных причин. Например, в случае вождения по дороге, имеющей низкое значение µ, имеет тенденцию возникать скольжение, и трудно выявлять, обусловлены или нет флуктуации в скорости вращения колес, возникающие в ассоциации с этим скольжением, неровностями на поверхности дороги. Кроме того, в случае дороги, имеющей низкое значение µ, величина флуктуации в скорости вращения колес, приписываемая неровностям на поверхности дороги или изменениям состояния подрессоренной массы, зачастую является небольшой, затрудняя отличение от других типов шума. Кроме того, поскольку флуктуации в движущей/тормозной силе также обуславливают флуктуации в скорости вращения колес, может быть затруднительным отличать между этими флуктуациями и состоянием подрессоренной массы или скоростью рабочего хода. Дополнительно, флуктуации в скорости вращения колес могут быть результатом поперечного ускорения или угловой скорости рысканья в нелинейных областях, таких как предел по кругу трения шин, и их может быть затруднительным отличать от других типов шума. Когда точность оценки понижается, могут быть случаи, в которых, например, демпфирующая сила задается равной низкому уровню, несмотря на необходимость задаваться равной высокому уровню, затрудняя обеспечение устойчивости состояния подрессоренной массы.
[0087] Это понижение точности оценки приводит к проблеме просто с точки зрения точности, и поскольку оно не заключает в себе сбоя в работе датчиков или сбоя в работе актуатора, желательно продолжать управление в диапазоне, в котором оно возможно. Соответственно, в первом варианте осуществления, модуль 4a определения снижения точности оценки предоставлен для того, чтобы определять случаи снижения точности оценки, и в случаях снижения точности оценки, управление продолжается по мере возможности при обеспечении рабочих характеристик, которые, по меньшей мере, не хуже или лучше рабочих характеристик обычного транспортного средства, в котором не выполняется управление демпфированием вибрации транспортного средства, с тем чтобы обеспечивать устойчивость поведения подрессоренной массы, ассоциированного со снижением точности оценки.
[0088] ПРОЦЕССЫ ОПРЕДЕЛЕНИЯ СНИЖЕНИЯ ТОЧНОСТИ ОЦЕНКИ
Фиг. 24 является блок-схемой управления, показывающей процессы определения снижения точности оценки первого варианта осуществления. В модуле 4a определения снижения точности оценки несколько процессов определения снижения точности оценки выполняются на основе различных видов сигналов, и в модуле 400 приема сигналов, когда определено снижение точности в даже одном из соответствующих процессов, сигнал со сниженной точностью выводится в модуль 401 хранения снижения точности. В модуле 401 хранения снижения точности, в течение интервала, в котором принимается сигнал со сниженной точностью, и в течение предварительно определенного времени после отсечки сигнала со сниженной точностью (в случае первого варианта осуществления, односекундного интервала), флаг снижения точности задается непрерывно активированным. Таким образом, частое переключение флага снижения точности может быть минимизировано при недопущении режимов управления на основе ошибочных значений оценки состояния. Ниже последовательно описываются соответствующие процессы определения снижения точности оценки.
[0089] ОПРЕДЕЛЕНИЕ ЧЕРЕЗ ФЛАГИ ABS, VDC ИЛИ TCS
Транспортное средство первого варианта осуществления имеет модуль антиблокировочного управления тормозом (в дальнейшем называется "модулем ABS-управления") для определения состояния скольжения колес во время торможения и выполнения регулирующего управления давлением, чтобы приводить скорость скольжения к предварительно определенному значению или ниже; модуль динамического управления транспортного средства (в дальнейшем называется "модулем VDC-управления") для управления давлением тормозной жидкости предписанных колес, чтобы переводить состояние поворачивания транспортного средства (например, угловая скорость рысканья) в целевое состояние поворачивания; и модуль управления тягой (в дальнейшем называется "модулем TCS-управления") для выполнения управления повышением тормозного давления или управления понижением крутящего момента двигателя, чтобы минимизировать скольжение при приведении в движение, когда транспортное средство начинает двигаться, и т.п.
В случаях, в которых эти модули управления работают, они должны оказывать влияние на флуктуации скорости вращения колес для колес, в силу этого приводя к риску снижения точности оценки. Следовательно, в случаях, в которых активированы флаг ABS, флаг VDC или флаг TCS, которые указывают то, что эти средства управления работают, сигнал активации флага выводится в модуль 410 хранения флага управления тормозом. В модуле 410 хранения флага управления тормозом, сигнал со сниженной точностью оценки выводится в течение интервала, в котором принимается сигнал активации флага. Сигнал со сниженной точностью продолжает выводиться в течение предварительно определенной длительности (в случае первого варианта осуществления, пятисекундного интервала) после потери сигнала активации флага. Таким образом, установившийся сигнал со сниженной точностью оценки может выводиться даже в таких случаях, когда флаг управления тормозом многократно активируется/деактивируется.
[0090] ОПРЕДЕЛЕНИЕ НА ОСНОВЕ ОПОРНОЙ СКОРОСТИ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА
Далее описывается определение на основе опорной скорости кузова транспортного средства. В первом варианте осуществления, в первом-третьем модулях 100, 200, 32 оценки состояния вождения, когда скорость рабочего хода оценивается из данных скорости вращения колес, опорная скорость вращения колес вычисляется для того, чтобы определять компонент, который флуктуирует в ассоциации с рабочим ходом S/A 3. Цель этого заключается в том, чтобы извлекать дифференциалы между опорной скоростью вращения колес и значениями датчика скорости вращения колес, в качестве компонента флуктуации в ассоциации с рабочим ходом. Хотя эта опорная скорость вращения колес может обеспечивать точную оценку скорости рабочего хода при условиях, в которых не возникает скольжение и т.п., когда возникает скольжение, становится затруднительным отличать то, являются или нет флуктуации флуктуациями, ассоциированными с рабочим ходом, или флуктуациями скорости вращения колес, ассоциированными со скольжением. В частотной области, включающей в себя компонент скорости рабочего хода, компонент скорости перемещения подрессоренной массы и т.п., невозможно отличать от шума и т.п., и следовательно, не может быть гарантирована точность сигнала. Соответственно, фильтр нижних частот для частоты на низкочастотном крае (в первом варианте осуществления, 0,5 Гц) относительно частот вибрации, возникающих вследствие скорости рабочего хода, скорости перемещения подрессоренной массы и т.п., применяется к опорной скорости вращения колес, и в случаях, в которых после применения этого фильтра нижних частот наблюдается переменность опорной скорости вращения колес между колесами, определено то, что флуктуации скорости вращения колес обусловлены скольжением, и что снижена точность оценки.
[0091] В модуле 420 оценки опорной скорости вращения колес, как описано в контексте модуля вычисления опорной скорости вращения колес по фиг. 6, первая скорость V0 вращения колес, которая служит в качестве опорной скорости вращения колес для каждого из колес, вычисляется на основе модели при виде сверху кузова транспортного средства. Здесь, ω (рад/с) является датчиком скорости вращения колес, определенным посредством датчика 5 скорости вращения колес, σf (рад) является фактическим углом поворота при рулении передними колесами, определенным посредством датчика 7 угла поворота при рулении, σr (рад) является фактическим углом поворота при рулении задними колесами, Vx является поперечной скоростью кузова транспортного средства, γ (рад/с) является угловой скоростью рысканья, определенной посредством интегрированного датчика 6, V (м/с) является скоростью кузова транспортного средства, оцененной из вычисленной опорной скорости ω0 вращения колес, VFL, VFR, VRL и VRR являются опорными скоростями вращения колес, которые должны быть вычислены, Tf является шириной колеи передних колес, Tr является шириной колеи задних колес, Lf является расстоянием от позиции центра тяжести транспортного средства до передних колес, и Lr является расстоянием от позиции центра тяжести транспортного средства до заднего колеса. Модель при виде сверху кузова транспортного средства выражается следующим образом с использованием обозначений, описанных выше.
[0092] (Формула 1)
VFL=(V-Tf/2*γ)coσsf+(Vx+Lf*γ)sinσf
VFR=(V+Tf/2*γ)coσsf+(Vx+Lf*γ)sinσf
VRL=(V-Tr/2*γ)coσsr+(Vx-Lr*γ)sinσr
VRR=(V+Tr/2*γ)coσsr+(Vx-Lr*γ)sinσr
При условии вождения в нормальном режиме, в котором отсутствует поперечное скольжение транспортного средства, 0 может вводиться для поперечной скорости Vx кузова транспортного средства. При перезаписи со значениями на основе V в соответствующих формулах, выражения представляют собой следующее. При перезаписи таким образом, V обозначается как V0FL, V0FR, V0RL и V0RR (эквивалентно первым скоростям вращения колес) в качестве значений, соответствующих соответствующим колесам.
(Формула 2)
V0FL={VFL-Lf*γsinσf}/coσsf+Tf/2*γ
V0FR={VFR-Lf*γsinσf}/coσsf-Tf/2*γ
V0RL={VRL+Lr*γsinσr}/coσsr+Tr/2*γ
V0RR={VRR+Lf*γsinσf}/coσsR-Tr/2*γ
Опорная скорость вращения колес для каждого колеса вычисляется на основе этих выражений отношения.
[0093] Затем, в фильтре 421 нижних частот, фильтрация при 0,5 Гц, которая представляет область на низкочастотном крае относительно частотной области, включающей в себя скорость рабочего хода и скорость перемещения подрессоренной массы, выполняется для опорной скорости V0FL, FR, RL, RR вращения колес, вычисленной для каждого колеса, и извлекается стационарный компонент. В модуле 422 определения дифференциалов вычисляются следующие соответствующие значения.
Компонент крена (дифференциал левых-правых колес)
df1=VOFL-VOFR
df2=VORL-VORR
Компонент наклона (дифференциал передних-задних колес)
df3=VOFL-VORL
df4=VOFR-VORR
Компонент отклонения от вертикали (диагональный дифференциал)
df5=VOFL-VORR
df6=VOFR-VORL
[0094] По существу, в случае вычисления этих дифференциалов с использованием значений, полученных после прохождения через фильтр 421 нижних частот, при условии, что не возникает скольжение, опорные скорости вращения колес всех колес равны, и следовательно, дифференциалы равны 0 или чрезвычайно небольшим значениям. Тем не менее, когда возникает скольжение, происходит изменение стационарного компонента, и следовательно, в случаях, в которых любой дифференциал df1-df5 значения, полученного после прохождения через фильтр 421 нижних частот, равен или превышает предварительно установленное предписанное значение dfthi, сигнал со сниженной точностью оценки выводится в модуль 423 хранения опорной скорости вращения колес. Кроме того, с тем чтобы предотвращать неравномерную работу во время этого определения, вывод сигнала со сниженной точностью оценки прекращается в случаях, в которых дифференциал равен или меньше значения, полученного посредством умножения предписанного значения dfthi на 0,8. В модуле 423 хранения опорной скорости вращения колес, в течение определенной длительности, когда принимается сигнал со сниженной точностью оценки, и в течение предписанной длительности после завершения приема (в случае первого варианта осуществления, двухсекундного интервала), непрерывно выводится сигнал со сниженной точностью. Таким образом, установившийся сигнал со сниженной точностью оценки может выводиться даже в случаях, в которых многократно активируется/деактивируется сигнал со сниженной точностью оценки модуля 422 определения дифференциалов.
[0095] ОПРЕДЕЛЕНИЕ НА ОСНОВЕ МОДЕЛИ ПРИ ВИДЕ СВЕРХУ
Далее описывается определение на основе модели при виде сверху. Как описано выше на фиг. 14, когда управление минимизацией угловой скорости крена выполняется при управлении входными воздействиями от водителя, устанавливается модель при виде сверху, и оценивается поперечное ускорение Yg.
Yg=(VSP2/(1+A*VSP2))* σf
Здесь, A является предписанным значением. Угловая скорость крена оценивается из поперечного ускорения Yg, оцененного на основе этой взаимосвязи. В это время, при таких условиях, что точность оценки скорости рабочего хода понижается вследствие возникновения скольжения и т.п., оцененное значение вышеуказанного поперечного ускорения расходится от фактического значения. Соответственно, фильтр нижних частот для частоты (в первом варианте осуществления, 0,5 на низкочастотном крае) относительно частот вибрации, сформированных посредством скорости рабочего хода, скорости перемещения подрессоренной массы и т.п., применяется к оцененному поперечному ускорению, и когда поперечное ускорение после применения этого фильтра нижних частот расходится от фактического поперечного ускорения, определенного посредством датчика поперечного ускорения, определено то, что флуктуации скорости вращения колес обусловлены скольжением, и что снижена точность оценки.
[0096] В модуле 430 оценки состояния движения транспортного средства считываются скорость VSP транспортного средства, определенная посредством датчика 8 скорости вращения колес, и угол поворота при рулении, определенный посредством датчика 7 угла поворота при рулении, и поперечное ускорение оценивается на основе модели при виде сверху. Аналогично, угловая скорость рысканья оценивается на основе модели при виде сверху. Относительно оценки угловой скорости рысканья, когда, например, угловая скорость рысканья обозначается как γ, она может быть вычислена из взаимосвязи Yg=VSP*γ или оценена на основе формулы 1 или формулы 2.
[0097] Затем, в фильтре 431 нижних частот, фильтрация посредством фильтра нижних частот на частоте 0,5 Гц, которая представляет область на низкочастотном крае относительно частотной области, включающей в себя скорость рабочего хода и скорость перемещения подрессоренной массы, выполняется для оцененного поперечного ускорения, оцененной угловой скорости рысканья и значения датчика из интегрированного датчика 6, и извлекается стационарный компонент. Затем, в модуле 432 определения дифференциалов, вычисляются дифференциалы соответствующего оцененного значения и значений датчиков.
dfyrss = оцененная угловая скорость рысканья - фактическая угловая скорость рысканья
dflgss = оцененное поперечное ускорение - фактическое поперечное ускорение
[0098] По существу, в случаях, в которых эти дифференциалы dfyrss, dflgss вычислены с использованием значений, полученных после прохождения через фильтр 431 нижних частот, когда не возникает скольжение и т.п., оцененные значения и значения датчиков приблизительно равны, и, следовательно, дифференциалы равны 0 или чрезвычайно небольшим значениям. Тем не менее, когда возникает скольжение, происходит изменение стационарного компонента, и следовательно, в случаях, в которых любой дифференциал dfyrss, dflgss значения, полученного после прохождения через фильтр 431 нижних частот, равен или превышает предварительно установленное предписанное значение dfthi, сигнал со сниженной точностью оценки выводится в модуль 433 хранения модели при виде сверху. Кроме того, с тем чтобы предотвращать неравномерную работу во время этого определения, вывод сигнала со сниженной точностью оценки прекращается в случаях, в которых дифференциал равен или меньше значения, полученного посредством умножения предписанного значения dfthi на 0,8. В модуле 433 хранения модели при виде сверху, в течение определенной длительности, когда принимается сигнал со сниженной точностью оценки, и в течение предписанной длительности после завершения приема (в случае первого варианта осуществления, двухсекундного интервала), непрерывно выводится сигнал со сниженной точностью. Таким образом, установившийся сигнал со сниженной точностью оценки может выводиться даже в случаях, в которых многократно активируется/деактивируется сигнал со сниженной точностью оценки модуля 432 определения дифференциалов.
[0099] ОПРЕДЕЛЕНИЕ НА ОСНОВЕ ПОЗИЦИИ ПЕРЕКЛЮЧЕНИЯ КОРОБКИ ПЕРЕДАЧ
Далее описывается определение на основе позиции переключения коробки передач. В случае, если, например, выбран диапазон заднего хода, направление вращения колес является противоположным направлением относительно направления во время перемещения вперед, и изменение, ассоциированное с флуктуациями скорости вращения колес, также отличается от изменения во время перемещения вперед. В случае, если выбран диапазон парковки, поскольку транспортное средство остановлено, нет необходимости оценивать скорость рабочего хода, и сама оценка является затруднительной. Следовательно, в модуле 440 определения переключения коробки передач, когда сигнал переключения коробки передач указывает либо диапазон заднего хода, либо диапазон парковки, сигнал со сниженной точностью выводится непрерывно в модуль 441 хранения позиций переключения коробки передач. С точки зрения предотвращения неравномерной работы в модуле 441 хранения позиций переключения коробки передач в ассоциации с операциями переключения передач, сигнал со сниженной точностью выводится непрерывно в течение предписанной длительности (в первом варианте осуществления, односекундного интервала) после завершения приема сигнала со сниженной точностью оценки.
[0100] ОПРЕДЕЛЕНИЕ НА ОСНОВЕ ТОРМОЗНОГО ПЕРЕКЛЮЧАТЕЛЯ
Далее описывается определение на основе тормозного переключателя. Когда водитель нажимает педаль тормоза, чтобы формировать тормозную силу, а затем выполняется операция отпускания педали тормоза, флуктуации крутящего момента, возникающие во время прекращения торможения, выступают в качестве импульсного ввода. Поскольку вибрация спереди назад возбуждается посредством этого импульсного ввода, заставляя флуктуировать скорость вращения колес, понижается точность оценки скорости рабочего хода и состояния подрессоренной массы. Соответственно, модуль 450 определения прекращения действия тормозной силы определяет то, переключен или нет тормозной переключатель из включенного в выключенное состояние, и в случае определения того, что он переключен, выводит сигнал со сниженной точностью в модуль 451 хранения состояний тормозного переключателя. Сигнал со сниженной точностью выводится непрерывно в течение предписанной длительности (в первом варианте осуществления, односекундного интервала) после момента времени, когда тормозной переключатель выключается.
[0101] ОПРЕДЕЛЕНИЕ НА ОСНОВЕ КРУТЯЩЕГО МОМЕНТА ПРИВЕДЕНИЯ В ДВИЖЕНИЕ НА ОБОДЕ КОЛЕСА
Далее описывается определение на основе крутящего момента приведения в движение на ободе колеса. Когда внезапное изменение крутящего момента возникает вследствие внезапного ускорения или переключения коробки передач, происходят изменения крутящего момента ведущих колес, в частности, изменения крутящего момента приведения в движение на ободе колеса, заставляя флуктуировать скорость вращения колес. Следовательно, в случаях, в которых возникает изменение крутящего момента приведения в движение на ободе колеса, равное или превышающее предписанный уровень, может определяться то, что снижена точность оценки. Оценка крутящего момента приведения в движение на ободе колеса во время ускорения может проводиться на основе информации, включающей в себя эффективный крутящий момент двигателя, число об/мин двигателя, число об/мин турбины, число об/мин выходного вала автоматической трансмиссии и позицию переключения коробки передач; более конкретно, она может быть представлена посредством следующей формулы.
Tw=Te*RTRQCVT*RAT*RFINAL*ηTOTAL
Здесь, Tw обозначает крутящий момент приведения в движение на ободе колеса, Te - крутящий момент двигателя, RTRQCVT - отношение крутящих моментов преобразователя крутящего момента, RAT - передаточное отношение автоматической трансмиссии, RFINAL - конечное передаточное отношение, и ηTOTAL - эффективность приводной системы.
Крутящий момент приведения в движение на ободе колеса аналогично также флуктуирует во время торможения. В этом случае, поскольку тормозная сила является пропорциональной давлению в колесном тормозном цилиндре (в случае нормального торможения, в котором не выполняется такое управление, как ABS, по существу давлению в главном цилиндре), тормозная сила на каждом колесе оценивается посредством умножения усиления на давление в главном цилиндре.
[0102] Когда крутящий момент приведения в движение на ободе колеса (или тормозной крутящий момент на ободе колеса) оценивается вышеуказанным способом, фильтрация посредством фильтра нижних частот на 0,5 Гц, который представляет область на низкочастотном крае относительно частотной области, включающей в себя скорость рабочего хода и скорость перемещения подрессоренной массы, выполняется для крутящего момента приведения в движение на ободе колеса посредством фильтра 460 нижних частот, и извлекается стационарный компонент. Псевдодифференциальный модуль 461 затем вычисляет, посредством дифференцирования, темп изменения крутящего момента приведения в движение на ободе колеса. В модуле 462 определения темпа изменения, когда вычисленный темп изменения крутящего момента приведения в движение на ободе колеса равен или превышает предварительно установленное предписанное значение dfthi, сигнал со сниженной точностью оценки выводится в модуль 463 хранения крутящего момента приведения в движение на ободе колеса. Кроме того, с тем чтобы предотвращать неравномерную работу во время этого определения, вывод сигнала со сниженной точностью оценки прекращается в случаях, в которых дифференциал равен или меньше значения, полученного посредством умножения предписанного значения dfthi на 0,8. В модуле 463 хранения характеристики зависимости скорости от крутящего момента приведения в движение на ободе колеса, в течение временного интервала, когда принимается сигнал со сниженной точностью оценки, и в течение предписанного интервала после завершения приема (в случае первого варианта осуществления, односекундного интервала), непрерывно выводится сигнал со сниженной точностью. Таким образом, установившийся сигнал со сниженной точностью оценки может выводиться даже в случаях, в которых многократно активируется/деактивируется сигнал со сниженной точностью оценки модуля 462 определения темпа изменения.
Когда во время выполнения вышеуказанных процессов определения снижение точности определяется в любом из них, активируется флаг сниженной точности оценки, и выполняется процесс управления, подходящий в моменты времени снижения точности. Процесс управления в моменты времени снижения точности описывается ниже.
[0103] ПРОЦЕСС УПРАВЛЕНИЯ В МОМЕНТЫ ВРЕМЕНИ СНИЖЕНИЯ ТОЧНОСТИ
В случаях, в которых флаг сниженной точности оценки активирован, в частности, когда определяется снижение точности оценки скорости рабочего хода, модуль 5a управления определенной сниженной точностью оценки выводит "нуль" в качестве величины управления ориентацией посредством двигателя в модуль 102 управления двигателем.
Дополнительно, в случаях, в которых флаг сниженной точности оценки активирован, модуль 5a управления определенной сниженной точностью оценки выводит "нуль" в качестве величины управления ориентацией посредством тормоза в модуль 202 управления тормозом.
В это время, в модуле 202 управления тормозом, величина управления ориентацией посредством тормоза постепенно понижается таким образом, что величина управления ориентацией посредством тормоза плавно понижается до нуля в течение фиксированного переходного интервала (например, односекундного интервала).
[0104] Когда управление движением наклона при торможении в целях поддержания скорости движения наклона подрессоренной массы равной низкому уровню внезапно прекращено, скорость движения наклона, которая до этого момента поддерживается равной низкому уровню, внезапно растет, что может приводить к дискомфорту для водителя, а также вызывать риск увеличенного поведения наклона или потерь загрузки шины при контакте с землей, что приводит к возмущениям в поведении транспортного средства. Посредством постепенного понижения величины управления тормозным крутящим моментом вышеуказанным способом, могут минимизироваться внезапные увеличения скорости движения наклона, и следовательно, может уменьшаться дискомфорт для водителя, и минимизируются возмущения в поведении транспортного средства.
[0105] Таким образом, как указано выше, в моменты времени, когда определяется снижение точности оценки скорости рабочего хода, приостанавливается управление демпфированием вибрации подрессоренной массы посредством двигателя 1 и тормозов 20. В первом варианте осуществления, скорость рабочего хода оценивается из флуктуаций скорости вращения колес в предписанном частотном диапазоне, и управление поведением подрессоренной массы с использованием двигателя 1 и тормозов 20 выполняется согласно скорости рабочего хода; следовательно, при условиях снижения точности оценки скорости рабочего хода, оценка состояния становится затруднительной, и возмущения в поведении подрессоренной массы вследствие ухудшенной управляемости являются проблемой. Следовательно, в таких случаях, посредством приостановки управления поведением подрессоренной массы посредством двигателя 1 и тормозов 20, могут минимизироваться возмущения в ориентации кузова транспортного средства, ассоциированные со снижением точности оценки, и может поддерживаться устойчивая ориентация кузова транспортного средства.
[0106] В случаях, в которых флаг сниженной точности оценки активирован, модуль 5a управления определенной сниженной точностью оценки выводит конкретный для сниженной точности оценки управляющий сигнал (значение управляющего тока) в модуль 35 управления демпфирующей силой. Фиг. 25 является блок-схемой управления, показывающей конфигурацию модуля 5a управления определенной сниженной точностью оценки в первом варианте осуществления. Модуль 501 вычисления скорости транспортного средства вводит флаг сниженной точности оценки, скорость VSP транспортного средства, определенную посредством датчика 8 скорости транспортного средства, и значение скорости VSP транспортного средства, наблюдаемое в предыдущем одном цикле дискретизации (одном тактовом сигнале). В случае, если флаг сниженной точности оценки деактивирован, модуль 501 вычисления скорости транспортного средства выводит в задерживающий элемент 502 скорость VSP транспортного средства, определенную посредством датчика 8 скорости транспортного средства; и в случае, если флаг сниженной точности оценки активирован, в течение временного интервала до тех пор, пока не будет деактивирован флаг, выводит в модуль 503 задания коэффициентов демпфирования скорость транспортного средства, наблюдаемую в предыдущем одном цикле дискретизации, в частности, скорость транспортного средства, наблюдаемую непосредственно перед тем, когда определено снижение точности оценки скорости рабочего хода. Задерживающий элемент 502 задерживает сигнал на один тактовый цикл. Модуль 503 задания коэффициентов демпфирования вводит скорость транспортного средства, наблюдаемую непосредственно перед тем, когда определено снижение точности оценки скорости рабочего хода, температуру наружного воздуха, определенную посредством температурного датчика 14, и текущий режим вождения и выводит коэффициент k5 демпфирования при сниженной точности оценки. Ниже поясняется способ установления коэффициента k демпфирования. В модуле 504 вычисления величины управления демпфирующей силой, управляющий сигнал для S/A 3 вычисляется на основе коэффициента k5 демпфирования и предварительно определенной гипотетической скорости рабочего хода. Здесь, гипотетическая скорость рабочего хода является фиксированным значением, представляющим скорость рабочего хода, так что демпфирующая сила S/A 3 является сравнимой с демпфирующей силой традиционных амортизаторов, например, 0,1 м/с.
[0107] Фиг. 26 является описательной схемой, показывающей способ задания коэффициента демпфирования при сниженной точности оценки в модуле задания коэффициентов демпфирования первого варианта осуществления. Коэффициент k5 демпфирования по существу является значением, пропорциональным скорости транспортного средства (скорости транспортного средства, наблюдаемой непосредственно перед тем, когда определено снижение точности оценки скорости рабочего хода), и имеет такой профиль, что для данной скорости транспортного средства, коэффициент демпфирования для стороны Fr передних колес выше коэффициента демпфирования для стороны Rr задних колес. Значение коэффициента k5 демпфирования также согласуется с режимом управления. Более конкретно, значение является наибольшим в спортивном режиме и режиме движения по шоссе и наименьшим в комфортном режиме. В стандартном режиме значение является промежуточным между спортивным режимом (режимом движения по шоссе) и комфортным режимом. Коэффициент k5 демпфирования в спортивном режиме и режиме движения по шоссе является коэффициентом демпфирования на верхнем пределе уровня, на котором вибрация в области вертикального колебательного движения (3-6 Гц) не передается пассажирам.
В случае комфортного режима, модуль задания коэффициентов демпфирования 504 задает коэффициент демпфирования в случаях, в которых температура наружного воздуха находится за пределами предписанного диапазона (например, температура наружного воздуха ≤5°C, или температура наружного воздуха ≥30°C или выше), равным значению выше коэффициента демпфирования в случаях, в которых температура наружного воздуха находится в предписанном диапазоне (например, 5°C< температура наружного воздуха <30°C) (коэффициент демпфирования, идентичный коэффициенту демпфирования комфортного режима).
[0108] Таким образом, как указано выше, в течение моментов времени, когда определяется снижение точности оценки скорости рабочего хода, используется чувствительное к скорости транспортного средства управление, в котором демпфирующая сила S/A3 задается равной фиксированной демпфирующей силе, соответствующей режиму управления. Причина состоит в том, что в моменты времени снижения точности оценки, хотя не возникает сбой сигнала датчика или приведения в действие актуатора, тем не менее, оценка состояния является затруднительной, и следовательно, требуется управление, при котором устойчивости назначается больший весовой коэффициент относительно обычных моментов времени, когда точность оценки не снижена. При чувствительном к скорости транспортного средства управлении, фиксированный коэффициент демпфирования определяется из скорости транспортного средства, наблюдаемой непосредственно перед тем, когда определено снижение точности оценки, и по сути не зависит от скорости рабочего хода, имеющей высокую вероятность ошибочной оценки, за счет чего, через переход в устойчивое состояние из неустойчивого состояния в зависимости от скорости рабочего хода, могут минимизироваться пониженная устойчивость при рулении/ухудшенные показатели комфорта во время езды и нарушение устойчивости поведения.
[0109] При чувствительном к скорости транспортного средства управлении, коэффициент k5 демпфирования устанавливается на основе скорости транспортного средства, наблюдаемой непосредственно перед тем, когда определено снижение точности оценки, и фиксированная демпфирующая сила определяется на основе коэффициента k5 демпфирования и предписанной гипотетической скорости рабочего хода (0,1 м/с). В это время, поскольку коэффициент k5 демпфирования задается равным значению, которое является более высоким в ассоциации с более высокой скоростью транспортного средства, наблюдаемой непосредственно перед тем, когда определено снижение точности оценки, получается оптимальная демпфирующая сила, соответствующая скорости транспортного средства. Иными словами, можно обеспечивать комфорт во время езды в зоне низких скоростей и обеспечивать устойчивое маневрирование в зоне высоких скоростей.
[0110] Кроме того, поскольку коэффициент k5 демпфирования допускает последовательно более высокие значения в спортивном режиме/режиме движения по шоссе, стандартном режиме и комфортном режиме, в этом порядке, может устанавливаться фиксированная демпфирующая сила, которая согласуется с режимом управления. Иными словами, в спортивном режиме и режиме движения по шоссе, демпфирующая сила является высокой, предоставляя приоритет устойчивому маневрированию; в комфортном режиме демпфирующая сила является низкой, предоставляя приоритет комфорту во время езды; и в стандартном режиме, демпфирующая сила является промежуточной, так что достигаются как устойчивое маневрирование, так и комфорт во время езды. Кроме того, в каждом режиме управления, фиксированная демпфирующая сила передних колес превышает фиксированную демпфирующую силу задних колес, за счет чего может минимизироваться опускание носовой части, тенденция недостаточной поворачиваемости может приспосабливаться в качестве тенденции руления, и может обеспечиваться устойчивое поведение при повороте.
[0111] Как показано выше, во время вождения в комфортном режиме, когда определяется снижение точности оценки скорости рабочего хода, и кроме того, температура наружного воздуха находится за пределами предписанного диапазона (например, температура наружного воздуха ≤5°C или температура наружного воздуха ≥30°C или выше), фиксированная демпфирующая сила задается равной более высокому уровню по сравнению с уровнем в случаях, в которых температура наружного воздуха находится за пределами предписанного диапазона (например, температура наружного воздуха ≤5°C или температура наружного воздуха ≥30°C или выше). Другими словами, в случаях, в которых пониженная точность оценки определена во время вождения в состоянии низкого коэффициента трения между шинами и поверхностью дороги в комфортном режиме, фиксированная демпфирующая сила должна задаваться равной более высокому уровню по сравнению с уровнем в случаях во время вождения в состоянии высокого коэффициента трения между шинами и поверхностью дороги. Причина состоит в том, что в случаях, в которых температура наружного воздуха находится внутри предписанного диапазона, можно определять то, что значение µ дороги является высоким, а когда температура наружного воздуха находится за пределами предписанного диапазона, коэффициент трения между шинами и поверхностью дороги может быть определен как низкий вследствие пониженной силы сцепления шин.
[0112] В случаях, в которых опускание носовой части возникает вследствие снижения точности оценки, вызывая изменение в направлении, которое уменьшает нагрузку на шины задних колес при контакте с землей, во время вождения на дороге с высоким значением µ так, что пороговый предел силы сцепления шин является высоким (круг трения является большим), существует низкая вероятность превышения порогового предела силы сцепления шин во время поворота; тем не менее, во время вождения на дороге с низким значением µ так, что пороговый предел силы сцепления шин является низким (круг трения является небольшим), существует высокая вероятность превышения порогового предела силы сцепления шин во время поворота. В частности, в комфортном режиме, в котором комфорт во время езды имеет приоритет, фиксированная демпфирующая сила допускает свое наименьшее значение по сравнению с другими тремя режимами, и следовательно, вышеописанная проблема становится довольно заметной. Следовательно, в случаях снижения точности оценки скорости рабочего хода во время вождения на дороге с низким значением µ в комфортном режиме, возникает риск пониженной устойчивости поведения при повороте, к примеру, вынужденное руление задним ходом и т.п. Здесь, руление задним ходом означает изменение тенденции руления, с тенденции недостаточной поворачиваемости на тенденцию избыточной поворачиваемости, во время поворота. По этой причине, согласно первому варианту осуществления, в комфортном режиме, фиксированная демпфирующая сила во время вождения на дороге с низким значением µ задается равной более высокому уровню по сравнению с демпфирующей силой во время вождения на дороге с высоким значением µ. Таким образом, может минимизироваться уменьшение нагрузки на задние шины при контакте с землей, и подавляться возникновение опускания носовой части, за счет этого минимизируя подверженность тенденции руления превращаться в тенденцию избыточной поворачиваемости и обеспечивая устойчивое поведение при повороте.
[0113] С другой стороны, в спортивном режиме, режиме движения по шоссе и стандартном режиме, фиксированная демпфирующая сила во время вождения на дороге с низким значением µ задается равной значению, идентичному значению демпфирующей силы во время вождения на дороге с высоким значением µ. Причина состоит в том, что, поскольку фиксированная демпфирующая сила в этих трех режимах превышает фиксированную демпфирующую силу в комфортном режиме, вероятность превышения порогового предела силы сцепления шин во время поворота во время вождения на дороге с низким значением µ является низкой. Кроме того, в спортивном режиме и режиме движения по шоссе, фиксированная демпфирующая сила равна максимальной фиксированной демпфирующей силе, при которой вибрация, формирующая вертикальное колебательное движение, не передается пассажирам, и следовательно, может минимизироваться ухудшение комфорта во время езды и повышаться устойчивость маневрирования.
[0114] В модуле 35c преобразования управляющих сигналов модуля 35 управления демпфирующей силой, в случае, если значение управляющего тока (конкретное для сниженной точности оценки значение управляющего тока) выведено посредством модуля 5a управления определенной сниженной точностью оценки, конкретное для сниженной точности оценки значение управляющего тока выводится в S/A 3 вместо значения управляющего тока (нормального значения управляющего тока) на основе скорости рабочего хода и коэффициента демпфирования, согласованного посредством модуля 35b согласования коэффициентов демпфирования. В это время, значение управляющего тока постепенно изменяется, с тем чтобы плавно осуществлять переход значения управляющего тока от текущего значения управляющего тока к конкретному для сниженной точности оценки значению управляющего тока, причем это осуществляется в течение предписанного времени перехода. Здесь, это время перехода является временем, эквивалентным, по меньшей мере, циклу резонанса подрессоренной массы (1,2 Гц) или меньше (например, 0,5 Гц), например, односекундному интервалу.
Во время переключения значения управляющего тока для S/A 3 с нормального значения управляющего тока на основе скорости рабочего хода на конкретное для сниженной точности оценки значение управляющего тока на основе скорости транспортного средства, в случаях, в которых значение управляющего тока для S/A 3 превышает разность двух значений управляющего тока, возникает риск внезапного изменения демпфирующей силы S/A, нарушая ориентацию кузова транспортного средства. Посредством постепенного изменения значения управляющего тока вышеописанным способом, чтобы ограничивать степень флуктуации демпфирующей силы, как указано выше, могут быть минимизированы возмущения ориентации кузова транспортного средства в моменты времени снижения точности оценки.
[0115] Как описано выше, первый вариант осуществления предоставляет следующие преимущества.
(1) Система содержит двигатель 1, тормоза 20 и S/A 3 (актуаторы), для выполнения управления подрессоренной массой; датчики 5 скорости вращения колес (средство определения скорости вращения колес) для определения скорости вращения колес, первое средство 100 оценки состояния вождения, второй модуль 200 оценки состояния вождения и третье средство 32 оценки состояния вождения (средство оценки состояния подрессоренной массы) для оценки состояния подрессоренной массы на основе информации в предписанной частотной области скорости вращения колес, определенной посредством датчиков 5 скорости вращения колес; контроллер 1a двигателя, тормозной контроллер 2a и S/A-контроллер 3a (средство управления ориентацией посредством актуатора) служат для управления актуаторами таким образом, чтобы переводить оцененное состояние подрессоренной массы в целевое состояние подрессоренной массы; модуль 420 оценки опорной скорости вращения колес (средство вычисления опорной скорости вращения колес), содержащий модуль 301 извлечения компонента движения на плоской поверхности (первый модуль вычисления) для вычисления первой скорости вращения колес, которая служит в качестве опорной скорости вращения колес для каждого колеса, причем осуществления этого на основе модели при виде сверху кузова транспортного средства, имеющей значения датчика скорости вращения колес в качестве ввода, модуль 302 исключения помех при крене (второй модуль вычисления) для вычисления второй скорости вращения колес, которая служит в качестве опорной скорости вращения колес для передних и задних колес, причем осуществления этого на основе модели при виде спереди кузова транспортного средства, имеющей первую скорость вращения колес в качестве ввода, модуль 303 исключения помех при движении наклона (третий модуль вычисления) для вычисления третьей скорости вращения колес, которая служит в качестве опорной скорости вращения колес для всех колес, причем осуществления этого на основе модели при виде сбоку кузова транспортного средства, имеющей вторые скорости вращения передних и задних колес в качестве ввода, и модуль 304 перераспределения опорной скорости вращения колес (модуль вычисления опорной скорости вращения колес) для вычисления опорной скорости вращения колес для каждого колеса, причем осуществления этого на основе модели при виде сверху кузова транспортного средства, имеющей третью скорость вращения колес в качестве ввода; и модуль 4a определения снижения точности оценки (средство определения снижения точности оценки), который определяет снижение точности, с которой оценка выполняется посредством первого модуля 100 оценки состояния вождения, второго модуля 200 оценки состояния вождения и третьего модуля 32 оценки состояния вождения, когда дифференциал между опорными скоростями вращения колес для колес на низкочастотной стороне относительно предварительно определенной частотной области, в которой возникает поведение подрессоренной массы, равен или превышает предписанное значение.
Следовательно, может быть определено то, что снижена точность оценки состояния подрессоренной массы, и могут не допускаться случаи, в которых управление продолжается при снижении точности оценки.
[0116] (2) Система содержит модуль 5a управления определенной сниженной точностью оценки (средство управления торможением), который, когда определено снижение точности оценки посредством модуля 4a определения снижения точности оценки, командует контроллеру 1a двигателя, тормозному контроллеру 2a и S/A-контроллеру 3a выполнять управление более ограниченным способом относительно ситуации, когда точность оценки не снижена.
Следовательно, ошибочное управление может минимизироваться через ограничение функциональности посредством модуля 5a управления определенной сниженной точностью оценки во времена, когда может минимизироваться снижение точности оценки состояния подрессоренной массы, и может достигаться устойчивая ориентация транспортного средства.
[0117] (3) Когда дифференциал, указывающий разность скорости вращения левых/правых колес, разность скорости вращения передних/задних колес или разность противолежащих углов между опорными скоростями вращения колес для колес, равен или превышает предписанное значение, модуль 4a определения снижения точности оценки определяет снижение точности, с которой оценка выполняется посредством первого модуля 100 оценки состояния вождения, второго модуля 200 оценки состояния вождения или третьего модуля 32 оценки состояния вождения.
Следовательно, снижение точности оценки может быть определено быстро с хорошей точностью.
[0118] (4) Актуаторы представляют собой S/A 3, допускающий варьирование демпфирующей силы, и модуль 5a управления определенной сниженной точностью оценки осуществляет переход демпфирующей силы S/A 3 к фиксированной демпфирующей силе.
Следовательно, может не допускаться дискомфорт, ассоциированный с управлением переменной демпфирующей силой, выполняемым на основе ошибочной информации, и может гарантироваться устойчивость транспортного средства.
[0119] (5) S/A-контроллер 3a имеет режим движения по шоссе, спортивный режим, стандартный режим и комфортный режим (множество режимов управления), в которых различные диапазоны управления демпфирующей силой устанавливаются для данной скорости рабочего хода, и модуль 5a управления определенной сниженной точностью оценки осуществляет переход к фиксированной демпфирующей силе в соответствии с преобладающим режимом управления в момент, когда определено снижение точности оценки посредством модуля 4a определения снижения точности оценки.
Например, когда определяется снижение точности оценки при вождении в комфортном режиме, может быть предусмотрен сценарий, в котором задание коэффициента демпфирования фиксированно равным низкому значению затрудняет обеспечение достаточной устойчивости с точки зрения состояния транспортного средства. В таких случаях, устойчивость может быть обеспечена посредством задания демпфирующей силы фиксированно равной более высокому уровню по сравнению с демпфирующей силой, устанавливаемой в комфортном режиме.
[0120] (6) Модуль 5a управления определенной сниженной точностью оценки осуществляет переход к фиксированной демпфирующей силе в соответствии со скоростью транспортного средства, наблюдаемой непосредственно перед определением снижения точности оценки посредством модуля 4a определения снижения точности оценки. Следовательно, фиксированная демпфирующая сила может устанавливаться на основе скорости транспортного средства, фактически используемой в каждом режиме управления, а не на основе скорости транспортного средства при снижении точности оценки, и может повышаться устойчивость транспортного средства.
[0121] (7) При осуществлении перехода демпфирующей силы S/A 3 к фиксированной демпфирующей силе, модуль 5a управления определенной сниженной точностью оценки осуществляет постепенное изменение в течение времени перехода, равного или меньшего частоты для резонансной частоты подрессоренной массы (в первом варианте осуществления, одна секунда). Следовательно, может не допускаться нарушение устойчивости транспортного средства в ассоциации с флуктуациями во время перехода к фиксированной демпфирующей силе, и может обеспечиваться устойчивость транспортного средства.
[0122] (8) Актуаторы представляют собой двигатель 1 (источник мощности транспортного средства), тормоза 20 (фрикционные тормоза) и S/A3 (амортизаторы с переменной демпфирующей силой); средства управления актуаторами представляют собой контроллер 1a двигателя, тормозной контроллер 2a и S/A-контроллер 3a; и когда определено снижение точности оценки посредством модуля 4a определения снижения точности оценки, модуль 5a управления определенной сниженной точностью оценки приостанавливает управление посредством контроллера 1a двигателя и тормозного контроллера 2a.
В частности, когда актуатор, который способствует ускорению при переднем/заднем ходе транспортного средства, такому как тормозной крутящий момент/крутящий момент приведения в движение, выполняет управление крутящим моментом в направлении переднего/заднего хода с использованием ошибочной информации или информации с низкой точностью, возникает риск создания непреднамеренного ускорения, не имеющего отношения к состоянию подрессоренной массы. В отличие от этого, посредством приостановки управления, влияющего на тормозной крутящий момент/крутящий момент приведения в движение в направлении переднего/заднего хода, может не допускаться риск дискомфорта для водителя.
[0123] (9) Система имеет датчики 5 скорости вращения колес для определения скорости вращения колес и содержит контроллер 1a двигателя, тормозной контроллер 2a и S/A-контроллер 3a (устройства управления) для оценки состояния подрессоренной массы на основе информации в предварительно определенной частотной области скорости вращения колес, определенной посредством датчиков 5 скорости вращения колес, и управления актуаторами таким образом, чтобы переводить оцененное состояние подрессоренной массы в целевое состояние подрессоренной массы, а также вычисления первой скорости вращения колес, которая служит в качестве опорной скорости вращения колес для каждого колеса, причем осуществления этого на основе модели при виде сверху кузова транспортного средства, имеющей значения датчика скорости вращения колес в качестве ввода, вычисления второй скорости вращения колес, которая служит в качестве опорной скорости вращения колес для передних и задних колес, причем осуществления этого на основе модели при виде спереди кузова транспортного средства, имеющей первую скорость вращения колес в качестве ввода, вычисления третьей скорости вращения колес, которая служит в качестве опорной скорости вращения колес для всех колес, причем осуществления этого на основе модели при виде сбоку кузова транспортного средства, имеющей вторые скорости вращения передних и задних колес в качестве ввода, вычисления опорной скорости вращения колес для каждого колеса, причем осуществления этого на основе модели при виде сверху кузова транспортного средства, имеющей третью скорость вращения колес в качестве ввода, и определения того, что снижена точность оценки, когда дифференциал между опорными скоростями вращения колес для колес на низкочастотной стороне относительно предварительно определенной частотной области, в которой возникает поведение подрессоренной массы, равен или превышает предписанное значение.
Следовательно, может быть определено то, что снижена точность оценки состояния подрессоренной массы, и могут не допускаться случаи, в которых управление продолжается при снижении точности оценки.
[0124] (10) Система имеет датчики 5 скорости вращения колес для определения скорости вращения колес; и контроллер 1a двигателя, тормозной контроллер 2a и S/A-контроллер 3a (устройства управления), которые оценивают состояние подрессоренной массы на основе информации в предварительно определенной частотной области скорости вращения колес, определенной посредством датчиков 5 скорости вращения колес, и управляют актуаторами таким образом, чтобы переводить оцененное состояние подрессоренной массы в целевое состояние подрессоренной массы, а также вычисления первой скорости вращения колес, которая служит в качестве опорной скорости вращения колес для каждого колеса, причем осуществления этого на основе модели при виде сверху кузова транспортного средства, имеющей значения датчика скорости вращения колес в качестве ввода, вычисления второй скорости вращения колес, которая служит в качестве опорной скорости вращения колес для передних и задних колес, причем осуществления этого на основе модели при виде спереди кузова транспортного средства, имеющей первую скорость вращения колес в качестве ввода, вычисления третьей скорости вращения колес, которая служит в качестве опорной скорости вращения колес для всех колес, причем осуществления этого на основе модели при виде сбоку кузова транспортного средства, имеющей вторые скорости вращения передних и задних колес в качестве ввода, вычисления опорной скорости вращения колес для каждого колеса, причем осуществления этого на основе модели при виде сверху кузова транспортного средства, имеющей третью скорость вращения колес в качестве ввода, и определения того, что снижена точность оценки, когда дифференциал между опорными скоростями вращения колес для колес на низкочастотной стороне относительно предварительно определенной частотной области, в которой возникает поведение подрессоренной массы, равен или превышает предписанное значение.
Следовательно, может быть определено то, что снижена точность оценки состояния подрессоренной массы, и могут не допускаться случаи, в которых управление продолжается при снижении точности оценки.
Реферат
Состояние подрессоренной массы оценивают на основании информации в предварительно определенной частотной области скорости вращения колес, определенной посредством датчика скорости вращения колес. Управляют актуатором таким образом, чтобы переводить оцененное состояние подрессоренной массы в целевое состояние подрессоренной массы. Вычисляют опорную скорость вращения колес для каждого колеса на основе модели при виде сверху кузова транспортного средства. Когда дифференциал между опорными скоростями вращения колес для колес на низкочастотной стороне относительно предварительно определенной частотной области, в которой возникает поведение подрессоренной массы, равен или превышает предписанное значение, определяют то, что понижается точность оценки состояния подрессоренной массы, и управление, выполняемое посредством средства управления ориентацией посредством актуатора, реализуют более ограниченным способом относительно ситуации, когда точность оценки не снижена. Предложены также устройства управления транспортным средством. Достигается определение снижения точности оценки состояния подрессоренной массы. 3 н.з. и 7 з.п. ф-лы, 26 ил.
Формула
- актуатор для выполнения управления демпфированием вибрации подрессоренной массы;
- средство определения скорости вращения колес для определения скорости вращения колес;
- средство оценки состояния подрессоренной массы для оценки состояния подрессоренной массы на основе информации в предписанном частотном диапазоне скорости вращения колес, определенной посредством средства определения скорости вращения колес;
- средство управления ориентацией посредством актуатора для управления актуатором таким образом, чтобы переводить оцененное состояние подрессоренной массы в целевое состояние подрессоренной массы;
- средство вычисления опорной скорости вращения колес, включающее в себя:
- первый модуль вычисления для вычисления первой скорости вращения колес, которая служит в качестве опорной скорости вращения колес для отдельных колес, причем осуществления этого на основе модели при виде сверху кузова транспортного средства, имеющей значения датчика скорости вращения колес в качестве ввода;
- второй модуль вычисления для вычисления второй скорости вращения колес, которая служит в качестве опорной скорости вращения колес для передних и задних колес, причем осуществления этого на основе модели при виде спереди кузова транспортного средства, имеющей первую скорость вращения колес в качестве ввода;
- третий модуль вычисления для вычисления третьей скорости вращения колес, которая служит в качестве опорной скорости вращения колес для всех колес, причем осуществления этого на основе модели при виде сбоку кузова транспортного средства, имеющей вторые скорости вращения передних и задних колес в качестве ввода; и
- модуль вычисления опорной скорости вращения колес для вычисления опорной скорости вращения колес для каждого колеса, причем осуществления этого на основе модели при виде сверху кузова транспортного средства, имеющей третью скорость вращения колес в качестве ввода; и
- средство определения снижения точности оценки, которое определяет снижение точности, с которой оценка выполняется посредством средства оценки состояния подрессоренной массы, когда дифференциал между опорными скоростями вращения колес для колес на низкочастотной стороне относительно предварительно определенной частотной области, в которой возникает поведение подрессоренной массы, равен или превышает предписанное значение.
- средство ограниченного управления, которое реализует управление, выполняемое посредством средства управления ориентацией посредством актуатора, более ограниченным способом относительно ситуации, когда не снижается точность оценки, по сравнению со случаем, когда определено снижение точности оценки посредством средства определения снижения точности оценки.
- актуатор представляет собой амортизатор с переменной демпфирующей силой, допускающий варьирование демпфирующей силы, и
- средство ограниченного управления осуществляет переход демпфирующей силы амортизатора с переменной демпфирующей силой к фиксированной демпфирующей силе.
- средство ограниченного управления осуществляет переход к фиксированной демпфирующей силе, соответствующей режиму управления, преобладающему, когда определено снижение точности оценки посредством средства определения снижения точности оценки.
- актуатор представляет собой источник мощности транспортного средства, фрикционный тормоз и амортизатор с переменной демпфирующей силой;
- средство управления актуатором включает в себя средство управления ориентацией посредством источника мощности, средство управления ориентацией посредством тормоза и средство управления демпфирующей силой; и
- причем когда определено снижение точности оценки посредством средства определения снижения точности оценки, средство ограниченного управления приостанавливает управление, выполняемое посредством средства управления ориентацией посредством источника мощности и средства управления ориентацией посредством тормоза.
- датчик скорости вращения колес для определения скорости вращения колес; и
- контроллер для оценки состояния подрессоренной массы на основе информации в предварительно определенной частотной области скорости вращения колес, определенной посредством датчика скорости вращения колес; для управления актуатором таким образом, чтобы переводить оцененное состояние подрессоренной массы в целевое состояние подрессоренной массы; для вычисления первой скорости вращения колес, которая служит в качестве опорной скорости вращения колес для отдельных колес, причем осуществления этого на основе модели при виде сверху кузова транспортного средства, имеющей значение датчика скорости вращения колес в качестве ввода; для вычисления второй скорости вращения колес, которая служит в качестве опорной скорости вращения колес для передних и задних колес, причем осуществления этого на основе модели при виде спереди кузова транспортного средства, имеющей первую скорость вращения колес в качестве ввода; для вычисления третьей скорости вращения колес, которая служит в качестве опорной скорости вращения колес для всех колес, причем осуществления этого на основе модели при виде сбоку кузова транспортного средства, имеющей вторые скорости вращения передних и задних колес в качестве ввода; для вычисления опорной скорости вращения колес для каждого колеса, причем осуществления этого на основе модели при виде сверху кузова транспортного средства, имеющей третью скорость вращения колес в качестве ввода; и для определения того, что снижена точность оценки, когда дифференциал между опорными скоростями вращения колес для колес на низкочастотной стороне относительно предварительно определенной частотной области, в которой возникает поведение подрессоренной массы, равен или превышает предписанное значение.
- датчик скорости вращения колес для определения скорости вращения колес; и
- контроллер, оценивающий состояние подрессоренной массы на основе информации в предварительно определенной частотной области скорости вращения колес, определенной посредством датчика скорости вращения колес; управляющий актуатором таким образом, чтобы переводить оцененное состояние подрессоренной массы в целевое состояние подрессоренной массы; вычисляющий первую скорость вращения колес, которая служит в качестве опорной скорости вращения колес для каждого колеса, причем осуществляющий это на основе модели при виде сверху кузова транспортного средства, имеющей значение датчика скорости вращения колес в качестве ввода; вычисляющий вторую скорость вращения колес, которая служит в качестве опорной скорости вращения колес для передних и задних колес, причем осуществляющий это на основе модели при виде спереди кузова транспортного средства, имеющей первую скорость вращения колес в качестве ввода; вычисляющий третью скорость вращения колес, которая служит в качестве опорной скорости вращения колес для всех колес, причем осуществляющий это на основе модели при виде сбоку кузова транспортного средства, имеющей вторые скорости вращения передних и задних колес в качестве ввода; вычисляющий опорную скорость вращения колес для каждого колеса, причем осуществляющий это на основе модели при виде сверху кузова транспортного средства, имеющей третью скорость вращения колес в качестве ввода; и определяющий то, что снижена точность оценки, причем дифференциал между опорными скоростями вращения колес для колес на низкочастотной стороне относительно предварительно определенной частотной области, в которой возникает поведение подрессоренной массы, равен или превышает предписанное значение.
Комментарии