Система подвески для транспортного средства, содержащая электромагнитный привод - RU2448000C2
Код документа: RU2448000C2
Чертежи






Описание
Область техники
Настоящее изобретение относится к системе подвески, включающей в себя электромагнитный привод.
Уровень техники
В последние годы была разработана в качестве системы подвески для транспортного средства так называемая система электромагнитной подвески, включающая в себя электромагнитный привод, выполненный с возможностью формирования относительно подрессоренной части и неподрессоренной части силы в направлении, в котором подрессоренная часть и неподрессоренная часть перемещаются к и от друг друга на основании силы электромагнитного двигателя. Например, в публикации JP 2007-203933 раскрыта такая система электромагнитной подвески. Раскрытая система подвески предполагается в качестве высокоэффективной системы подвески ввиду преимущества, что можно легко осуществлять характеристику демпфирования колебаний на основании так называемой теории верхней подвески, так как система подвески может вырабатывать толкающую силу по относительному перемещению подрессоренной части и неподрессоренной части.
Краткое описание изобретения
В системе подвески, раскрытой в вышеуказанной публикации JP 2007-203933, пружина расположена последовательно с электромагнитным приводом, например, с целью борьбы с высокочастотными колебаниями. Однако в сконструированной таким образом системе, когда привод вырабатывает силу привода, сформированная сила привода передается на подрессоренную часть и неподрессоренную часть через пружину. Соответственно, система подвески страдает от проблемы, что сила привода, которая вырабатывается, не может передаваться вследствие временного запаздывания, которое является результатом передачи силы привода через пружину, и тому подобное. Настоящее изобретение было сделано ввиду ситуации, описанной выше. Поэтому задачей изобретения является создание системы подвески, в которой сила, которая действует между подрессоренной частью и неподрессоренной частью благодаря приводу и соединительному механизму, делается надлежащей.
Для решения указанной выше задачи система подвески для транспортного средства согласно настоящему изобретению составлена включением в состав соединительного механизма для упругого соединения: одного из узла подрессоренной стороны и узла неподрессоренной стороны, которые являются составляющими элементами привода; и одной из подрессоренной части и неподрессоренной части, к которой присоединен один из узла подрессоренной стороны и узла неподрессоренной стороны, и настоящая система подвески отличается определением целевой силы привода на основе: (a) требуемой действующей силы, которая требуется для действия между подрессоренной частью и неподрессоренной частью благодаря приводу и соединительному механизму; и (b) инерционной силы одного из узла подрессоренной стороны и узла неподрессоренной стороны по отношению к смещению одной из подрессоренной части и неподрессоренной части наряду с использованием: первой передаточной функции, которая является передаточной функцией, согласно которой выдается величина смещения одного из узла подрессоренной стороны и узла неподрессоренной стороны относительно одной из подрессоренной части и неподрессоренной части, когда вводится сила привода; и второй передаточной функции, которая является передаточной функцией, согласно которой выдается фактическая действующая сила, которая является силой, которая фактически действует между подрессоренной частью и неподрессоренной частью, когда вводится величина смещения.
В системе подвески согласно изобретению сила, которая должна формироваться приводом, определяется с учетом зависимости между силой привода и силой, которая фактически действует между подрессоренной частью и неподрессоренной частью в результате передачи силы привода через соединительный механизм, и, кроме того, с учетом влияния смещения одной из подрессоренной части и неподрессоренной части, к которой присоединен один из узла подрессоренной стороны и узла неподрессоренной стороны соединительным механизмом. Соответственно, сила, которая действует между подрессоренной частью и неподрессоренной частью, может делаться надлежащей.
Варианты осуществления изобретения
Далее будут пояснены различные варианты изобретения, которые считаются способными быть предметом формулы изобретения (в дальнейшем указываемые ссылкой как «способное быть предметом притязания изобретение» там, где уместно). Каждый из вариантов изобретения пронумерован подобно прилагаемым пунктам формулы изобретения и зависит от другого варианта или вариантов там, где уместно. Это предназначено для более легкого понимания изобретения и должно быть понятно, что комбинации составляющих элементов, которые составляют изобретение, не ограничены описанными в последующих вариантах. То есть должно быть понятно, что способное быть предметом притязания изобретение должно интерпретироваться в свете последующих описаний различных вариантов и предпочтительных вариантов осуществления. Кроме того, должно быть понятно, что любой вариант, в котором один или более элементов добавляются в или удаляются из любого одного из следующих вариантов, может рассматриваться в качестве одного варианта, способного быть предметом притязания изобретения.
(1) Система подвески транспортного средства содержит:
электромагнитный привод, включающий в себя: узел подрессоренной стороны, присоединенный к подрессоренной части; узел неподрессоренной стороны, который присоединен к неподрессоренной части и который подвижен относительно узла подрессоренной стороны в соответствии с перемещением подрессоренной части и неподрессоренной части к и от друг друга; и электромагнитный двигатель, привод является сконфигурированным для вырабатывания на основании силы электромагнитного двигателя силы привода, которая является силой по относительному перемещению узла подрессоренной стороны и узла неподрессоренной стороны;
соединительный механизм, который включает в себя опорную пружину для предоставления одному из узла подрессоренной стороны и узла неподрессоренной стороны возможности упруго подпираться одной из подрессоренной части и неподрессоренной части, к которой присоединен упомянутый один из узла подрессоренной стороны и узла неподрессоренной стороны, соединительный механизм является сконфигурированным для соединения упомянутого одного из узла подрессоренной стороны и узла неподрессоренной стороны и упомянутой одной из подрессоренной части и неподрессоренной части; и
контроллер, который включает в себя часть определения целевой силы привода, сконфигурированную для определения согласно предписанному закону управления целевой силы привода, которая является силой привода, требуемой для формирования приводом, контроллер является сконфигурированным для управления силой привода, которая должна формироваться приводом, на основании целевой силы привода,
при этом часть определения целевой силы привода выполнена с возможностью определения целевой силы привода на основе: (a) требуемой действующей силы, которая является силой, требуемой для действия между подрессоренной частью и неподрессоренной частью благодаря приводу и соединительному механизму; и (b) инерционной силы упомянутого одного из узла подрессоренной стороны и узла неподрессоренной стороны по отношению к смещению упомянутой одной из подрессоренной части и неподрессоренной части наряду с использованием: первой передаточной функции, которая является передаточной функцией, согласно которой выдается величина смещения упомянутого одного из узла подрессоренной стороны и узла неподрессоренной стороны относительно упомянутой одной из подрессоренной части и неподрессоренной части, когда вводится сила привода; и второй передаточной функции, которая является передаточной функцией, согласно которой выдается фактическая действующая сила, которая является силой, которая фактически действует между подрессоренной частью и неподрессоренной частью, когда вводится величина смещения.
В качестве системы подвески, имеющей электромагнитный привод, была предложена система, в которой пружина расположена последовательно с приводом с целью борьбы с высокочастотными колебаниями, производимыми, когда транспортное средство, например, наталкивается на неровную поверхность дороги или поверхность дороги с непрерывной неровностью. Система согласно вышеприведенному варианту (1) относится к такой системе. В тех случаях, когда система подвески сконструирована таким образом, сила привода, сформированная приводом, передается на подрессоренную часть и неподрессоренную часть через опорную пружину. Соответственно, сила привода, которая вырабатывается, не может передаваться, вызывая разность между силой привода и фактической действующей силой, которая фактически действует на подрессоренную часть и неподрессоренную часть. Более точно, обеспечивается разность между значением силы привода и значением фактической действующей силы, например, обусловленная временным запаздыванием, которое является результатом передачи силы привода через опорную пружину. Такая разность между силой привода и фактической действующей силой вызывает проблему, что, например, колебания, возникающие в транспортном средстве, не могут демпфироваться надлежащим образом.
Согласно варианту (1) определение целевой силы привода основано на требуемой действующей силе и использует первую передаточную функцию и вторую передаточную функцию, в силу чего целевая сила привода может определяться с учетом характеристики передачи силы привода относительно передачи силы привода на подрессоренную часть и неподрессоренную часть через соединительный механизм. Соответственно, сила, которая действует между подрессоренной частью и неподрессоренной частью, может делаться надлежащей. То есть сила привода, такая как демпфирующая сила, может делаться надлежащей.
В тех случаях, когда используются «первая передаточная функция» и «вторая передаточная функция», описанные в варианте (1), может быть получена зависимость между силой привода и фактической действующей силой. Вкратце, в тех случаях, когда учитывается зависимость между силой привода и фактической действующей силой, сила привода, которая должна вырабатываться приводом, может определяться из условия, чтобы фактическая действующая сила становилась равной требуемой действующей силе. Однако первая передаточная функция и вторая передаточная функция устанавливаются с учетом только перемещения одного из узла подрессоренной стороны и узла неподрессоренной стороны относительно одной из подрессоренной части и неподрессоренной части. Фактически одна из подрессоренной части и неподрессоренной части смещена в любой момент времени. Соответственно, желательно учитывать влияние смещения одной из подрессоренной части и неподрессоренной части. Ввиду этого в варианте (1) целевая сила привода определяется на основании требуемой действующей силы наряду с использованием вышеуказанных первой передаточной функции и второй передаточной функции, а кроме того, на основании инерционной силы одного из узла подрессоренной стороны и узла неподрессоренной стороны по отношению к смещению одной из подрессоренной части и неподрессоренной части. Согласно варианту (1) поэтому сила, которая действует между подрессоренной частью и неподрессоренной частью, может делаться надлежащей, учитывая влияние смещения одной из неподрессоренной части и подрессоренной части, гарантируя эффективное демпфирование колебаний. Соответственно, можно предотвращать ухудшение комфорта во время движения транспортного средства, управляемости и устойчивости транспортного средства и так далее, являющееся результатом последовательной компоновки соединительного механизма по отношению к приводу.
Каждая из первой передаточной функции и второй передаточной функции может быть определена в качестве отношения преобразования Лапласа выходного сигнала к преобразованию Лапласа входного сигнала или отношения z-преобразования выходного сигнала к z-преобразованию входного сигнала (z-преобразование может быть пояснено в качестве преобразования Лапласа на дискретной группе). Что касается «части определения целевой силы привода», описанной в варианте (1), ее часть для выполнения расчета двух передаточных функций особо не ограничена по конструкции, но может быть создана включением в состав вычислительного узла, такого как схема для расчета выходного значения по входному значению. В качестве альтернативы, часть определения целевой силы привода может быть создана включением в состав части для выполнения обработки согласно программе, которая хранится в компьютере общего применения, также используемого для другого управления и который предназначен для расчета выходного значения по входному значению.
В тех случаях, когда один из узла подрессоренной стороны и узла неподрессоренной стороны считается смещаемым в соответствии со смещением одной из подрессоренной части и неподрессоренной части, «инерционная сила», описанная в варианте (1), может рассматриваться в качестве силы, имеющей модуль в соответствии с ускорением одной из подрессоренной части и неподрессоренной части в вертикальном направлении. Отмечено, что инерционная сила не означает инерционную силу, имеющую модуль только в соответствии с фактической массой одного из узла подрессоренной стороны и узла неподрессоренной стороны. Инерционная сила может быть определена, как изложено ниже. В тех случаях, когда привод включает в себя винтовой механизм для преобразования относительно друг друга вращательного движения поворотного двигателя и относительного перемещения узла подрессоренной стороны и узла неподрессоренной стороны, момент инерции двух узлов может быть преобразован в инерциальную массу, а сила, имеющая модуль, который соответствует инерциальной массе, может рассматриваться в качестве инерционной силы. То есть в варианте (1) инерциальная масса может определяться с использованием так называемой эквивалентной инерциальной массы.
«Привод» в варианте (1) не является особо ограниченным по своей конструкции. Могут применяться различные электромагнитные приводы, известные в данной области техники. Сила, вырабатываемая приводом, является силой по относительному перемещению узла подрессоренной стороны и узла неподрессоренной стороны. Сила включает в себя не только силы сопротивления против относительного перемещения, но также и силу, посредством которой узел подрессоренной стороны и узел неподрессоренной стороны положительно перемещаются относительно друг друга, а именно толкающей силы, и силу, посредством которой относительное перемещение двух узлов предохраняется от внешней силы, подаваемой в него, а именно удерживающей силы. Тип «электромагнитного двигателя» привода может не быть ограниченным особым образом, но может надлежащим образом выбираться из числа различных типов, включающих в себя бесщеточный электродвигатель постоянного тока. Исходя из способа движения двигателя двигатель может быть поворотным двигателем или линейным двигателем.
«Закон управления» для определения целевой силы привода, например, включает в себя правило, относящееся к управлению демпфированием колебаний. Чтобы быть более точным, закон управления включает в себя правило для выполнения управления на основании так называемой теории амортизаторов верхней подвески для вырабатывания демпфирующей силы по отношению к колебаниям подрессоренной части (то есть подрессоренных колебаний). Правило может быть предназначено для одновременного выполнения в дополнение к управлению демпфированием колебаний, управления сдерживанием крена для сдерживания крена кузова транспортного средства, являющегося результатом поворачивания транспортного средства, управления сдерживанием продольного раскачивания для сдерживания продольного раскачивания кузова транспортного средства, являющегося результатом ускорения и замедления транспортного средства, и управления для регулировки расстояния между подрессоренной частью и неподрессоренной частью, а именно управления регулировкой высоты. В тех случаях, когда закон управления предназначен для одновременного выполнения множества управляющих воздействий, сумма составляющих силы привода в соответствующих управляющих воздействиях приведена в качестве требуемой действующей силы, и целевая сила привода может определяться на основании требуемой действующей силы, двух передаточных функций и инерционной силы.
«Соединительный механизм» в варианте (1) главным образом может быть предусмотрен, например, для борьбы с колебаниями, чья частота относительно высока. Несмотря на то, что соединительный механизм может включать в себя опорную пружину в качестве основного составляющего элемента, соединительный механизм может также включать в себя гидравлический амортизатор, который будет пояснен подробно, для демпфирования колебаний, производимых благодаря установке опорной пружины. Опорная пружина может иметь любую конструкцию. В тех случаях, когда соединительный механизм включает в себя гидравлический амортизатор, как пояснено ниже, может применяться винтовая пружина. В этом случае амортизатор в качестве цилиндрического устройства расположен, чтобы быть вставленным через винтовую пружину или размещенным в винтовой пружине, в силу чего может быть реализована система подвески, которая компактна по размеру.
Термин «соединять», используемый в настоящем описании изобретения, означает не только непосредственное соединение, но также и опосредованное соединение, при котором элементы присоединены друг к другу опосредованно некоторым компонентом, деталью, узлом или тому подобным, вставленным между ними. Например, в тех случаях, когда узел подрессоренной стороны и узел неподрессоренной стороны присоединены к подрессоренной части и неподрессоренной части соответственно, чьи узлы могут быть непосредственно присоединены к подрессоренной части и неподрессоренной части или опосредованно к подрессоренной части и неподрессоренной части через пружину, гидравлический амортизатор или тому подобное, вставленные между ними.
(2) Система подвески согласно варианту (1), в которой сложная передаточная функция установлена в качестве обратной функции от функции, которая является произведением первой передаточной функции и второй передаточной функции,
при этом часть определения целевой силы привода выполнена с возможностью определения целевой силы привода на основе выходного значения, полученного вводом требуемой действующей силы в сложную передаточную функцию, и инерционной силы.
(3) Система подвески согласно варианту (2), в которой часть определения целевой силы привода выполнена с возможностью определения целевой силы привода согласно зависимости между выходным значением, полученным вводом требуемой действующей силы в сложную передаточную функцию, и инерционной силой, зависимость указывает, что разность между выходным значением и целевой силой привода соответствует инерционной силе.
В вышеприведенных двух вариантах (2) и (3) воплощена технология расчета целевой силы привода. «Сложная передаточная функция», описанная в вышеприведенных двух вариантах, является передаточной функцией, согласно которой выдается значение силы привода, когда фактическая действующая сила вводится в нее. То есть посредством подачи требуемой действующей силы в сложную передаточную функцию выдается сила привода, которая должна формироваться приводом. Однако так как выходное значение, указывающее силу привода, выдаваемую из сложной передаточной функции, не учитывает смещение одной из подрессоренной части и неподрессоренной части, как описано выше, выходное значение, которое выдается из сложной передаточной функции, может корректироваться на основании инерционной силы. Более точно, как в последнем варианте (3), инерционная сила может прибавляться к или вычитаться из выходного значения сложной функции, принимая во внимание направление, в котором работает инерционная сила, в силу чего определяется целевая сила привода.
(4) Система подвески согласно любому одному из вариантов (1)-(3), в которой соединительный механизм выполнен с возможностью соединения узла неподрессоренной стороны в качестве упомянутого одного из узла подрессоренной стороны и узла неподрессоренной стороны и неподрессоренной части в качестве упомянутой одной из подрессоренной части и неподрессоренной части и сконфигурирован из условия, чтобы опорная пружина давала узлу неподрессоренной стороны возможность упруго подпираться неподрессоренной частью,
при этом часть определения целевой силы привода выполнена с возможностью определения целевой силы привода на основе требуемой действующей силы и инерционной силы узла неподрессоренной стороны по отношению к смещению неподрессоренной части наряду с использованием первой передаточной функции, согласно которой выдается величина смещения узла неподрессоренной части относительно неподрессоренной части, когда вводится сила привода, и второй передаточной функции, согласно которой выдается фактическая действующая сила, которая является силой, которая фактически действует между подрессоренной частью и неподрессоренной частью, когда вводится величина смещения.
Согласно вышеприведенному варианту (4) соединительный механизм расположен между неподрессоренной частью и узлом неподрессоренной стороны привода, в силу чего сотрясение, подаваемое с колеса и передаваемое на привод, смягчается и преодолеваются высокочастотные колебания, такие как резонанс неподрессоренных масс. Согласно варианту (4) поэтому сотрясение, передаваемое на электромагнитный двигатель, и высокочастотные колебания могут эффективно подавляться, так что реализуется система подвески с высокой надежностью.
В случае, когда колесо, например, проходит по выступам и впадинам поверхности дороги, неподрессоренная часть перемещается энергично, так что энергично перемещается узел неподрессоренной стороны. Соответственно, считается, что часто возникает ситуация, в которой инерционная сила узла неподрессоренной стороны становится относительно большой. В варианте (4) целевая сила привода определяется с учетом инерционной силы узла неподрессоренной стороны по отношению к смещению неподрессоренной части, так что сила привода может делаться более подходящей.
(5) Система подвески согласно любому одному из вариантов (1)-(4), в которой соединительный механизм включает в себя амортизатор, расположенный параллельно с опорной пружиной и выполненный с возможностью выработки демпфирующей силы по отношению к относительному перемещению упомянутого одного из узла подрессоренной стороны и узла неподрессоренной стороны и упомянутой одной из подрессоренной части и неподрессоренной части.
(6) Система подвески согласно варианту (5), в которой первая передаточная функция и вторая передаточная функция установлены на основании коэффициента демпфирования амортизатора.
В вышеприведенных двух вариантах (5) и (6) применяется соединительный механизм, в котором гидравлический амортизатор расположен параллельно опорной пружине. «Амортизатор» может быть предусмотрен для содействия опорной пружине, а именно для демпфирования колебаний, имеющих относительно высокую частоту. Согласно вышеприведенным двум вариантам поэтому можно эффективно демпфировать высокочастотные колебания, такие как резонанс неподрессоренных масс. Наряду с тем, что конструкция амортизатора особо не ограничена, амортизатор может иметь конструкцию в качестве цилиндрического устройства, имеющего корпус, поршень и т.д. В тех случаях, когда соединительный механизм включает в себя амортизатор, первая передаточная функция и вторая передаточная функция устанавливаются с использованием коэффициента демпфирования амортизатора, как описано в последнем варианте (6).
(7) Система подвески согласно варианту (6), в которой амортизатор выполнен таким образом, чтобы его коэффициент демпфирования делался разным в зависимости от направления относительного перемещения упомянутого одного из узла подрессоренной стороны и узла неподрессоренной стороны и упомянутой одной из подрессоренной части и неподрессоренной части,
при этом часть определения целевой силы привода выполнена с возможностью изменения первой передаточной функции и второй передаточной функции, которые должны использоваться в зависимости от направления относительного перемещения.
В «амортизаторе» согласно вышеприведенному варианту (7) его коэффициент демпфирования в пределах хода, в котором один из узла подрессоренной стороны и узла неподрессоренной стороны и одна из подрессоренной части и неподрессоренной части перемещаются друг к другу, сделан отличным от коэффициента демпфирования в пределах хода, в котором один из узла подрессоренной стороны и узла неподрессоренной стороны и одна из подрессоренной части и неподрессоренной части перемещаются друг от друга. Например, коэффициент демпфирования может делаться меньшим в пределах хода перемещения друг к другу, чем коэффициент демпфирования в пределах хода перемещения друг от друга, с целью эффективного ослабления толчкового сотрясения, которое возникает, например, когда колесо проходит по выступам и впадинам поверхности дороги. В тех случаях, когда соединительный механизм имеет амортизатор, первая передаточная функция и вторая передаточная функция устанавливаются с использованием коэффициента демпфирования амортизатора. Соответственно, вариант (7) может быть выполнен с возможностью из условия, чтобы первая передаточная функция и вторая передаточная функция изменялись между теми, которые установлены с использованием коэффициента демпфирования в пределах хода перемещения друг к другу, и теми, которые установлены с использованием коэффициента демпфирования в пределах хода перемещения друг от друга. Согласно варианту (7) оценивается направление относительного перемещения одного из узла подрессоренной стороны и узла неподрессоренной стороны и одной из подрессоренной части и неподрессоренной части, и целевая сила привода определяется в зависимости от направления, в силу чего модуль силы, которая действует между подрессоренной частью и неподрессоренной частью, может делаться более подходящим.
(8) Система подвески согласно варианту (7), дополнительно содержащая датчик величины перемещения для определения величины перемещения подрессоренной части и неподрессоренной части к и от друг друга и датчик величины действия двигателя для определения величины действия электромагнитного двигателя,
при этом часть определения целевой силы привода выполнена с возможностью оценки направления относительного перемещения упомянутого одного из узла подрессоренной стороны и узла неподрессоренной стороны и упомянутой одной из подрессоренной части и неподрессоренной части на основе значения, определенного датчиком величины перемещения, и значения, определенного датчиком величины действия двигателя.
В вышеприведенном варианте (8) воплощена технология оценки направления относительного перемещения одного из узла подрессоренной стороны и узла неподрессоренной стороны и одной из подрессоренной части и неподрессоренной части. Привод сконструирован из условия, чтобы относительное перемещение узла подрессоренной стороны и узла неподрессоренной стороны и работа двигателя были взаимосвязаны. Соответственно, величина относительного перемещения узла подрессоренной стороны и узла неподрессоренной стороны (в дальнейшем указываемая ссылкой как «величина относительного перемещения узлов», где уместно) может оцениваться по определенному значению датчика величины действия двигателя. Поэтому направление вытягивания и сжатия амортизатора может оцениваться по изменению разности между величиной перемещения подрессоренной части и неподрессоренной части к и от друг друга, определенной датчиком величины перемещения, и величиной относительного перемещения узлов, оцененной по определенному значению датчика величины действия двигателя. Так как датчик величины перемещения и датчик величины действия двигателя являются требуемыми при обычном управлении приводом и тому подобном, выполняемом системой подвески, вариант (8) устраняет установку дополнительных датчиков, предохраняя систему от усложнения.
Краткое описание чертежей
Фиг.1 - схематичный вид, иллюстрирующий общую структуру системы подвески для транспортного средства согласно одному из вариантов осуществления изобретения.
Фиг.2 - увеличенный вид в разрезе, иллюстрирующий сборку пружины-поглотителя, показанную на фиг.1.
Фиг.3 - смоделированный вид сборки пружины-поглотителя по фиг.2.
Фиг.4 - смоделированный вид сборки пружины-поглотителя по фиг.2 в случае, когда учитывается смещение неподрессоренной части.
Фиг.5 - блок-схема последовательности операций способа, показывающая программу управления приводом, выполняемую электронным блоком управления подвески, показанным на фиг.1.
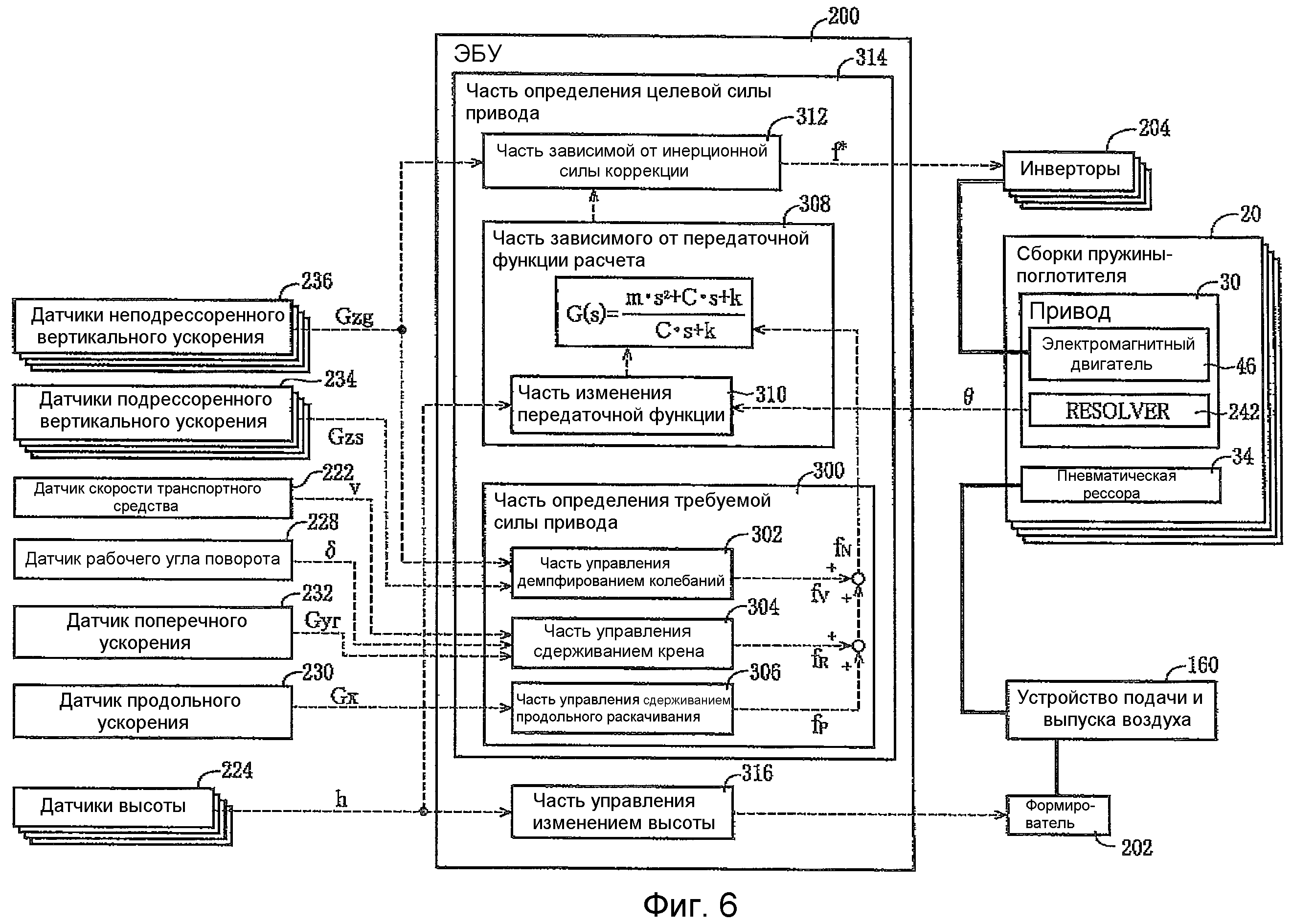
Фиг.6 - структурная схема, показывающая функции контроллера системы подвески по фиг.1.
Фиг.7(a) - структурная схема части определения целевой силы привода в варианте осуществления, способного быть предметом притязания изобретения, и фиг.7(b) - структурная схема части определения целевой силы привода в модифицированном варианте осуществления.
Подробное описание вариантов осуществления изобретения
Один из вариантов осуществления способного быть предметом притязания изобретения и его модифицированный вариант осуществления будут подробно пояснены со ссылкой на чертежи. Однако должно быть понятно, что способное быть предметом притязания изобретение не ограничено последующими вариантами осуществления, но может быть воплощено с различными изменениями и модификациями, такими как описанные в разделе описания варианты осуществления изобретения, которые могут приходить на ум специалистам в данной области техники. Кроме того, должно быть понятно, что модифицированный вариант осуществления последующего варианта осуществления предоставлен посредством использования технических вопросов, описанных в пояснении каждого из вариантов в вариантах изобретения.
1. Конструкция системы подвески
Фиг.1 схематично показывает систему 10 подвески для транспортного средства согласно варианту осуществления, способного быть предметом притязания изобретения. Система 10 подвески включает в себя четыре независимых устройства подвески, которые соответственно соответствуют четырем колесам 12, а именно переднему левому колесу, переднему правому колесу, заднему левому колесу и заднему правому колесу. Каждое из устройств подвески включает в себя сборку 20 пружины-поглотителя, в которой объединены подвесная рессора и амортизатор. Четыре колеса 12 и четыре сборки 20 пружины-поглотителя совместно указываются ссылкой как колесо 12 и сборка 20 пружины-поглотителя соответственно. Там где необходимо проводить отличие четырех колес 12 друг от друга и проводить отличие четырех сборок 20 пружины-поглотителя друг от друга, присоединены индексы «FL», «FR», «RL» и «RR» соответственно, указывающие переднее левое колесо, переднее правое колесо, заднее левое колесо и заднее правое колесо.
Как показано на фиг.2, сборка 20 пружины-поглотителя расположена между нижним рычагом 22 подвески, удерживающим колесо 12 и частично составляющим неподрессоренную часть, и установочной частью 24, расположенной на кузове транспортного средства и частично составляющей подрессоренную часть, с тем чтобы соединять нижний рычаг 22 подвески и установочную часть 24. Сборка 20 пружины-поглотителя, в целом, сегментирована на электромагнитный привод 30, соединительный механизм 32 для соединения привода 30 и нижнего рычага 22 и пневматической рессоры 34 в качестве подвесной рессоры. Сборка 20 пружины-поглотителя включает в себя в качестве своих составляющих элементов привод 30, соединительный механизм 32 и пневматическую рессору 34, которые объединены.
Привод 30 включает в себя шариковый винтовой механизм, электромагнитный двигатель 46 роторного типа (в дальнейшем указанный ссылкой просто как «двигатель 46», где уместно) и корпус 48, который вмещает двигатель 46. Шариковый винтовой механизм включает в себя резьбовой стержень 42 в качестве части с наружной резьбой, в котором сформирована канавка, муфту 44 в качестве части с внутренней резьбой, которая удерживает шарики подшипника и которая свинчена с резьбовым стержнем 42. Корпус 48 с возможностью вращения удерживает резьбовой стержень и присоединен на своей круговой части к установочной части 24. Двигатель 46 имеет полый вал 50 двигателя. Резьбовой стержень 42, проходящий через вал 50 двигателя, прикреплен к верхней торцевой части вала 60 двигателя. То есть двигатель 46 выполнен с возможностью выдачи поворачивающей силы на резьбовой стержень 42.
Привод 30 включает в себя наружную трубу 60, прикрепленную на своем верхнем торце к корпусу 48, с резьбовым стержнем 42, вставленным через нее, и уступчатую внутреннюю трубу 62, помещенную в наружную трубу 60 и выступающую вниз из нижней торцевой части наружной трубы 60. Внутренняя труба 62 имеет верхнюю торцевую часть большого диаметра, в которой удерживается муфта 44, из условия, чтобы муфта 44 свинчивалась с резьбовым стержнем 42. Наружная труба 60 сформирована на своей внутренней поверхности стенки с парой направляющих канавок 64, которые проходят в направлении, в котором проходит ось привода 30 (в дальнейшем указываемом ссылкой как «направление оси», где уместно). В пару направляющих канавок 64 установлена пара шпонок 66, предусмотренных в верхней торцевой части внутренней трубы 62. Благодаря направляющим канавкам 64 и шпонкам 66, помещенным в них, наружная труба 60 и внутренняя труба 62 могут быть относительно подвижными в осевом направлении будучи не поворачиваемыми по отношению друг к другу. Внутренняя труба 62 присоединена в своей нижней торцевой части к соединительному механизму 32.
Соединительный механизм 32 имеет гидравлический амортизатор 70. Несмотря на то, что конструкция амортизатора 70 подробно не описана, амортизатор 70 имеет конструкцию, подобную таковой у гидравлического амортизатора двухтрубного типа. Амортизатор 70 включает в себя корпус 72, в который вмещена рабочая текучая среда, поршень 74, непроницаемым для текучей среды и допускающим скольжение образом вмещенный во внутренней части корпуса 72, и шток 76 поршня, присоединенный на своем нижнем конце к поршню 74 и проходящий вверх от верхней торцевой части корпуса 72. Корпус 72 присоединен к нижнему рычагу 22 через втулку 78, предусмотренную на нижнем торце корпуса 72. Шток 76 поршня присоединен в своей верхней концевой части, которая проходит вверх от верхней торцевой части корпуса 72, к нижней торцевой части внутренней трубы 62. Согласно конструкции внутренняя труба 62 присоединена к нижнему рычагу 22 через амортизатор 70.
Кольцевая нижняя тарелка 90 прикреплена к наружной круговой части корпуса 72 амортизатора 70. Защитная труба 92, которая вмещает внутреннюю трубу 62, нижнюю торцевую часть наружной трубы 60 и верхнюю часть амортизатора 70, прикреплена в своей нижней торцевой части к нижней тарелке 90. Плавающий элемент 94 прикреплен к части соединения внутренней трубы 62 и штока 76 поршня. Плавающий элемент 94 удерживается посредством и между винтовой пружиной 96 сжатия, расположенной между плавающим элементом 94 и нижней тарелкой, и винтовой пружиной 100 сжатия, расположенной между плавающим элементом 94 и кольцевой выступающей частью 98, функционирующей в качестве верхней тарелки и сформированной внутри защитной трубы 92.
Пневматическая рессора 34 включает в себя гильзу 120 камеры, прикрепленную к установочной части 24, защитную трубу 92, функционирующую в качестве воздушного поршневого цилиндра, и диафрагму 124, соединяющую гильзу 120 камеры и защитную трубу 92. Гильза 120 камеры присоединена в своей колпачковой части 126 к корпусу 48 привода 30 через пружинную опору 128, которая имеет резиновую деталь демпфирования колебаний. Колпачковая часть 126 гильзы 120 камеры присоединена к установочной части 24 через верхнюю опору 130, имеющую резиновую деталь демпфирования колебаний. Диафрагма 124 прикреплена на одном своем конце к нижней торцевой части гильзы 120 камеры, а на другом ее конце к верхней торцевой части защитной трубы 92. Гильза 120 камеры, защитная труба 92 и диафрагма взаимодействуют друг с другом, чтобы определять камеру 132 давления, в которой заполнен сжатый воздух в качестве флюида. Благодаря конструкции нижний рычаг 22 и установочная часть 24, а именно колесо и кузов транспортного средства, упруго подпираются относительно друг друга давлением сжатого воздуха пневматической рессоры 34. Следует отметить, что жесткость пружины в случае, где предполагается, что вышеуказанные винтовые пружины 96, 100 сжатия должны составлять единую пружину, делается большей, чем жесткость пружины пневматического амортизатора 34.
В конструкции, описанной выше, привод 30 включает в себя узел подрессоренной стороны, включающий в себя резьбовой стержень 42, двигатель 46, корпус 48, наружную трубу 60 и т.д. и присоединенный к установочной части 24, и узел неподрессоренной стороны, включающий в себя муфту 44, внутреннюю трубу 62, плавающий элемент 94 и т.д. и присоединенный к нижнему рычагу 22. Привод 30 сконфигурирован из условия, чтобы узел подрессоренной стороны и узел неподрессоренной стороны являлись невращаемыми относительно друг друга и были подвижны относительно друг друга в осевом направлении в соответствии с перемещением подрессоренной части и неподрессоренной части к и от друг друга. Соединительный механизм 32, указанный выше, расположен между (a) узлом неподрессоренной стороны в качестве одного из узла подрессоренной стороны и узла неподрессоренной стороны и (b) неподрессоренной части в качестве одной из подрессоренной части и неподрессоренной части, которая присоединена к узлу неподрессоренной стороны. Соединительный механизм 32 выполнен с возможностью соединения узла неподрессоренной стороны и неподрессоренной части. Две винтовые пружины 96, 100 сжатия функционируют в качестве одной опорной пружины (в дальнейшем винтовые пружины 96, 100 сжатия указываются ссылкой как «опорная пружина 96, 100»).
Привод 30 сконфигурирован из условия, чтобы, когда подрессоренная часть и неподрессоренная часть перемещаются к и от друг друга, узел подрессоренной стороны и узел неподрессоренной стороны были подвижны относительно друг друга в осевом направлении, а именно резьбовой стержень 42 и муфта 44 являются подвижными относительно друг друга в осевом направлении, и резьбовой стержень 42 вращается относительно муфты 44 в соответствии с относительным перемещением. Соответственно, вал 50 двигателя вращается. Двигатель 46 может выдавать крутящий момент на резьбовой стержень 42. Благодаря крутящему моменту можно формировать силу сопротивления против относительного вращения резьбового стержня 42 и муфты 44 в направлении для предотвращения относительного вращения. Сила сопротивления применяется в качестве демпфирующей силы по отношению к относительному перемещению узла подрессоренной стороны и узла неподрессоренной стороны и, соответственно, в качестве демпфирующей силы по отношению к перемещению подрессоренной части и неподрессоренной части к и от друг друга, в силу чего привод 30 функционирует в качестве так называемого амортизатора. В дополнение, привод 30 способен к формированию толкающей силы по отношению к относительному движению подрессоренной части и неподрессоренной части. Соответственно, система 10 способна к выполнению управления на основе так называемой теории амортизаторов верхней подвески, теории амортизаторов нижней подвески и тому подобного. Кроме того, благодаря крутящему моменту двигателя 46 можно сохранять расстояние между подрессоренной частью и неподрессоренной частью на произвольном расстоянии, в силу чего крен кузова транспортного средства при повороте и продольное раскачивание кузова транспортного средства при ускорении и замедлении транспортного средства могут эффективно сдерживаться или подавляться и может настраиваться высота транспортного средства. Расстояние между подрессоренной частью и неподрессоренной частью в дальнейшем указывается ссылкой как «подрессоренное-неподрессоренное расстояние», где уместно.
Узел неподрессоренной стороны привода 30 и нижний рычаг 22 соединены соединительным механизмом, который включает в себя амортизатор 70 и винтовые пружины 96, 100 сжатия. Амортизатор 70 выполнен с возможностью вырабатывания демпфирующей силы по отношению к относительному перемещению узла неподрессоренной стороны и неподрессоренной части, в силу чего относительные колебания узла неподрессоренной стороны и неподрессоренной части могут эффективно демпфироваться. Несмотря на то, что это и не пояснено подробно, амортизатор сконфигурирован из условия, чтобы его коэффициент демпфирования при его ходе сжатия и коэффициент демпфирования при его ходе расширения были взаимно отличными друг от друга. Более точно, коэффициент Cc демпфирования в пределах хода сжатия, а именно в случае, где узел неподрессоренной стороны и неподрессоренная часть перемещаются друг к другу, сделан меньшим, чем коэффициент Ct демпфирования в пределах хода расширения, а именно в случае, где узел неподрессоренной стороны и неподрессоренная часть перемещаются друг от друга с целью эффективного ослабления тряски, которая пробивает колесо, когда колесо проходит по выступам на поверхности дороги.
При сосредоточении на функции демпфирования колебаний привода 30 перемещение привода 30 идет плавно по отношению к низкочастотным колебаниям в 5 Гц или ниже, в силу чего такие низкочастотные колебания могут эффективно демпфироваться. Однако трудно эффективно демпфировать высокочастотные колебания, превышающие 10 Гц, так как перемещение привода 30 едва ли будет отслеживать. В настоящей сборке 20 пружины-поглотителя привод 30 и нижний рычаг 22 соединены соединительным механизмом, указанным выше, так что передача таких высокочастотных колебаний, превышающих 10 Гц, с неподрессоренной части на подрессоренную часть может эффективно подавляться соединительным механизмом 32.
Как показано на фиг.1, система 10 подвески имеет устройство впуска и выпуска текучей среды для обеспечения возможности воздуху в качестве текучей среды втекать в и вытекать из пневматической рессоры 34 каждой сборки 20 пружины-поглотителя, более точно, устройство 160 подачи и выпуска воздуха, которое присоединено к камере 132 давления каждой пневматической рессоры 34, с тем чтобы подавать воздух в камеру 132 давления и выпускать воздух из таковой 132. Несмотря на то, что не пояснено подробно, объем воздуха в камере 132 давления каждого пневматического амортизатора 34 может регулироваться устройством 160 подачи и выпуска воздуха в сконструированной таким образом системе 10 подвески. Посредством регулировки объема воздуха длина рессоры у каждой пневматической рессоры 34 может изменяться и в силу этого изменяется подрессоренное-неподрессоренное расстояние для каждого колеса 12. Более точно, объем воздуха в камере 132 давления увеличивается, тем самым увеличивая подрессоренное-неподрессоренное расстояние наряду с тем, что объем воздуха в камере 132 давления уменьшается, тем самым уменьшая подрессоренное-неподрессоренное расстояние. Другими словами, настоящая система 10 способна к настройке высоты транспортного средства.
В системе 10 подвески сборка 20 пружины-поглотителя управляется электронным блоком 200 управления подвески в качестве контроллера (в дальнейшем указываемого ссылкой как «ЭБУ 200», где уместно), а именно привод 30 и пневматическая рессора 34 управляются посредством ЭБУ 200. ЭБУ 200 подвески, принципиально, составлен компьютером, оснащенным ЦПУ (центральным процессорным устройством), ПЗУ (постоянным запоминающим устройством), ОЗУ (оперативным запоминающим устройством) и т.д. К ЭБУ 200 подвески присоединены: формирователь 202 в качестве схемы возбуждения для устройства 160 подачи и выпуска воздуха и инверторы 204, предусмотренные, с тем чтобы соответствовать соответственным двигателям 46 приводов 30. Каждый инвертор 204 функционирует в качестве схемы возбуждения для управления соответствующим двигателем 46. ЭБУ 200 подвески управляет пневматическими рессорами 34, управляя формирователем 202, и управляет силой привода, вырабатываемой каждым из приводов 30, управляя четырьмя инверторами. Формирователь 202 и инверторы 204 присоединены к аккумуляторной батарее [BAT] 208 через конвертер [CONV] 206. Электрическая мощность подводится из источника электропитания, созданного включением в состав конвертера 206 и аккумуляторной батареи 208, к клапанам управления, двигателю насоса и тому подобному у устройства 160 подачи и выпуска воздуха и двигателям 46 соответственных приводов 30. Инвертор 204 сконфигурирован из условия, чтобы электрическая мощность, вырабатываемая двигателем 46 благодаря электродвижущей силе, могла регенерироваться в источник электропитания. Двигатель 46 выполнен с возможностью формирования не только силы двигателя, которая зависит от тока питания, который является электрическим током, подаваемым из источника электропитания в двигатель 46, но также и силы двигателя, которая зависит от электродвижущей силы. Инвертор 204 выполнен с возможностью регулировки электрического тока, втекающего в двигатель 46, а именно посредством управления током возбуждения двигателя 46, независимо от того, вводится ли электрический ток из источника электропитания или вырабатывается электродвижущей силой для управления силой двигателя. В этом отношении каждый инвертор 204 изменяет коэффициент заполнения последовательности импульсов, то есть отношение времени включения импульса ко времени выключения импульса, согласно широтно-импульсной модуляции (ШИМ), тем самым регулируя ток возбуждения каждого двигателя 46.
Транспортное средство содержит: замок 220 зажигания [I/G]; датчик 222 скорости транспортного средства [v] для определения ходовой скорости транспортного средства (в дальнейшем указываемой ссылкой как «скорость транспортного средства», где уместно); четыре датчика 224 высоты [h], каждый в качестве датчика величины перемещения для определения подрессоренного-неподрессоренного расстояния для соответствующего колеса 12; переключатель 226 изменения высоты транспортного средства [HSw], управляемый водителем транспортного средства для отправки управляющих сигналов на изменение высоты транспортного средства; датчик 228 рабочего угла управления [δ] для определения угла управления рулевого колеса; датчик 230 продольного ускорения [Gx] для определения фактического продольного ускорения, фактически производимого в кузове транспортного средства; датчик 232 бокового ускорения [Gy] для определения фактического бокового ускорения, фактически производимого в кузове транспортного средства; четыре датчика 234 подрессоренного вертикального ускорения [Gzs] соответственно для определения вертикального ускорения установочных частей 24 кузова транспортного средства, соответствующих соответственным колесам 12; четыре датчика 236 неподрессоренного вертикального ускорения [Gzg] соответственно для определения вертикального ускорения соответственных колес 12; датчик 238 дросселя [Sr] для определения степени открывания дроссельной заслонки; датчик 240 давления в тормозной системе [Br] для определения давления в главном цилиндре тормозной системы и четыре круговых датчика 242 положения [θ], каждый в качестве датчика величины действия двигателя для определения угла поворота каждого двигателя 46. Эти датчики и переключатели присоединены к компьютеру ЭБУ 200. ЭБУ 200 выполнен с возможностью управления работой каждой сборки 20 пружины-поглотителя на основании сигналов, отправляемых с этих датчиков и переключателей. Символ в каждых квадратных скобках используется на чертежах для указания соответствующего датчика или переключателя. В ПЗУ компьютера ЭБУ 200 хранятся программы, относящиеся к управлению приводами 300, различные данные и т.д.
2. Управление в системе подвески
В настоящей системе 10 подвески четыре сборки 20 пружины-поглотителя могут управляться независимо друг от друга. В четырех сборках 20 пружины-поглотителя сила привода у привода 30 регулируется независимо, тем самым выполняется управление для демпфирования колебаний кузова транспортного средства и колеса 12, а именно колебаний подрессоренной части (то есть подрессоренных колебаний) и колебаний неподрессоренной части (то есть неподрессоренных колебаний). В дальнейшем управление указывается ссылкой как «управление демпфированием колебаний», где уместно. Кроме того, выполняются: (a) управление для сдерживания крена кузова транспортного средства, который является результатом поворачивания транспортного средства (в дальнейшем указываемое ссылкой как «управление сдерживанием крена») и (b) управление для сдерживания продольного раскачивания кузова транспортного средства, которое является результатом ускорения и замедления транспортного средства (в дальнейшем указываемое ссылкой как «управление сдерживанием продольного раскачивания»). Вначале требуемая действующая сила, которая требуется для действия между подрессоренной частью и неподрессоренной частью, получается суммированием составляющей демпфирования колебаний при управлении демпфированием колебаний, составляющей сдерживания крена при управлении сдерживанием крена и составляющей сдерживания продольного раскачивания при управлении сдерживанием продольного раскачивания, каждая из которых является составляющей силы привода при соответствующем управлении. Затем целевая сила привода определяется из условия, чтобы сила, которая фактически действует между подрессоренной частью и неподрессоренной частью, становилась равной требуемой действующей силе, и привод 30 управляется, чтобы вырабатывать целевую силу привода. Таким образом, указанные выше управление демпфированием колебаний, управление сдерживанием крена и управление сдерживанием продольного раскачивания выполняются искусственно. В последующем пояснении сила привода и ее составляющая являются положительными значениями при соответствии силе по направлению (то есть направлению обратного хода пружины), в котором подрессоренная часть и неподрессоренная часть перемещаются друг от друга, и отрицательными значениями при соответствии силе по направлению (то есть направлению прямого хода пружины), в котором подрессоренная часть и неподрессоренные части перемещаются друг к другу.
i) Управление сдерживанием колебаний
При управлении сдерживанием колебаний определяется составляющая fV демпфирования колебаний силы привода для формирования силы привода, имеющей модуль, соответствующий угловой скорости колебаний транспортного средства и колеса 12, которые должны демпфироваться. То есть управление сдерживанием колебаний является управлением, при котором искусственно выполняется управление, основанное на так называемой теории верхней подвески, и управление, основанное на теории амортизаторов нижней псевдоподвески. Более точно, составляющая fV демпфирования колебаний рассчитывается согласно следующей формуле на основе (1) скорости перемещения установочной части 24 в вертикальном направлении, полученной из подрессоренного вертикального ускорения, которое определено датчиком 234 подрессоренного вертикального ускорения, расположенным на установочной части 24, то есть так называемой абсолютной подрессоренной скорости VS; и (2) скорости перемещения колеса 12 в вертикальном направлении, полученной из неподрессоренного вертикального ускорения, которое определено датчиком 236 неподрессоренного вертикального ускорения, расположенным на нижнем рычаге 22, то есть так называемой абсолютной неподрессоренной скорости Vg:
fV=Cs·Vs-Cg·Vg.
В вышеприведенной формуле Cs - коэффициент усиления для формирования силы демпфирования в соответствии со скоростью перемещения установочной части 24 в вертикальном направлении, а Cg - коэффициент усиления для формирования силы демпфировании в соответствии со скоростью перемещения колеса 12 в вертикальном направлении. То есть коэффициенты Cs, Cg усиления могут считаться коэффициентами демпфирования по отношению к так называемым подрессоренным абсолютным колебаниям и неподрессоренным абсолютным колебаниям соответственно.
ii) Управление сдерживанием крена
При поворачивании транспортного средства подрессоренная часть и неподрессоренная часть, расположенные на внутренней стороне по отношению к повороту, перемещаются друг от друга наряду с тем, что подрессоренная часть и неподрессоренная часть, расположенные на внешней стороне по отношению к повороту, перемещаются друг к другу вследствие момента крена, который является результатом поворачивания. При управлении сдерживанием крена привод 30, расположенный на внутренней стороне по отношению к повороту, управляется, чтобы вырабатывать в качестве силы сдерживания крена силу привода в направлении прямого хода пружины наряду с тем, что привод 30, расположенный на внешней стороне по отношению к повороту, управляется, чтобы вырабатывать в качестве силы сдерживания крена силы привода в направлении обратного хода пружины для сдерживания относительного перемещения подрессоренной части и неподрессоренной части, расположенных на внутренней стороне по отношению к повороту, друг от друга и для сдерживания относительного перемещения подрессоренной части и неподрессоренной части, расположенных на внешней стороне по отношению к повороту, друг к другу. Более точно, используемое в управлении боковое ускорение Gy*, которое должно использоваться при управлении, определяется в качестве бокового ускорения, указывающего момент крена, который принимает кузов транспортного средства, согласно следующей формуле на основе: (1) оценочного бокового ускорения Gyc, которое оценивается на основании рабочего угла δ управления рулевого колеса и скорости v транспортного средства; и (2) фактического бокового ускорения Gyr, которое фактически измеряется датчиком 232 бокового ускорения:
Gy*=K1·Gyc+K2·Gyr (K1, K2: коэффициенты усиления)
Составляющая fR сдерживания крена определяется на основании определенного таким образом используемого в управлении бокового ускорения Gy* согласно следующей формуле:
fR=K3·Gy* (K3: коэффициент усиления)
iii) Управление сдерживанием продольного раскачивания
Когда кузов транспортного средства наклоняется вперед при замедлении, таком как при торможении, подрессоренные части и неподрессоренные части, расположенные на стороне передних колес транспортного средства, перемещаются друг к другу наряду с тем, что подрессоренные части и неподрессоренные части, расположенные на стороне задних колес транспортного средства, перемещаются друг от друга вследствие момента продольного раскачивания, который вызывает наклон вперед. Когда кузов транспортного средства припадает к земле при ускорении, подрессоренные части и неподрессоренные части, расположенные на стороне передних колес транспортного средства, перемещаются друг от друга наряду с тем, что подрессоренные части и неподрессоренные части, расположенные на стороне задних колес транспортного средства, перемещаются друг к другу вследствие момента продольного раскачивания, который вызывает припадание к земле. При управлении сдерживанием продольного раскачивания сила привода вырабатывается в качестве силы сдерживания продольного раскачивания для сдерживания или подавления изменения с подрессоренного-неподрессоренного расстояния при клевании носом и припадании к земле. Более точно, фактическое продольное ускорение Gx, которое фактически измеряется датчиком 230 продольного ускорения, используется в качестве продольного ускорения, указывающего момент продольного раскачивания, который принимает кузов транспортного средства. На основе фактического продольного ускорения Gx составляющая fP сдерживания продольного раскачивания определяется согласно следующей формуле:
fP=K4·Gx (K4: коэффициент усиления)
Управление сдерживанием продольного раскачивания выполняется, когда степень открывания дроссельной заслонки, определенная датчиком 238 дроссельной заслонки, превышает предписанное пороговое значение, или давление в главном цилиндре, определенное датчиком 240 давления в тормозной системе, превышает предписанное пороговое значение.
iv) Определение требуемой действующей силы
После того как составляющая fV демпфирования колебаний, составляющая fR сдерживания крена и составляющая fP сдерживания продольного раскачивания были определены, как описано выше, требуемая действующая сила fN, которая требуется для действия между подрессоренной частью и неподрессоренной частью, определяется на основе таких составляющих согласно следующей формуле:
fN=fV+fR+fP
На основе определенной таким образом требуемой действующей силы fN определяется целевая сила f* привода, которая является силой привода, требуемой для формирования приводом 30. В настоящей системе 10 подвески соединительный механизм 32, включающий в себя винтовые пружины 96, 100 сжатия, и амортизатор 70 расположены последовательно с приводом 30. Соответственно, сила привода передается между подрессоренной частью и неподрессоренной частью через соединительный механизм 32. В настоящей системе 10 поэтому целевая сила f* привода определяется с учетом характеристик передачи сборки 20 пружины-поглотителя относительно передачи силы привода подрессоренной части и неподрессоренной части через соединительный механизм 32.
v) Характеристика передачи
В дальнейшем характеристика передачи сборки 20 пружины-поглотителя будет пояснена подробно. Фиг.3 - смоделированный вид сборки 20 пружины-поглотителя. В тех случаях, когда сила привода определена в качестве «fA(t)», а величина смещения узла неподрессоренной стороны относительно неподрессоренной части определена в качестве «x(t)», посредством использования времени «t» в качестве параметра, уравнение движения в отношении узла неподрессоренной стороны представлено, как изложено ниже. Величина x(t) смещения положительна, когда узел неподрессоренной стороны смещен вверх.
В вышеприведенном уравнении «m» представляет инерциальную массу узла неподрессоренной стороны, «C» представляет коэффициент демпфирования амортизатора 70, а «k» представляет жесткость пружины в случае, где предполагается, что две винтовые пружины 96, 100 сжатия должны составлять одну пружину. Вышеприведенное уравнение (1) подвергается преобразованию Лапласа с использованием в качестве параметра «s», который является оператором Лапласа, в силу чего получается следующая формула:
Следует отметить, что «X(s)» и «FA(s)» являются функциями, полученными посредством преобразования Лапласа от «x(t)» и fA(t) соответственно. То есть первая передаточная функция G1(s) представлена в качестве G1(s)=-1/(m·s2+C·s+k). Первая передаточная функция является передаточной функцией, согласно которой выдается величина смещения узла неподрессоренной стороны относительно неподрессоренной части, когда вводится сила привода.
В тех случаях, когда фактическая действующая сила, которая фактически действует на неподрессоренную часть, определена в качестве «fr(t)» наряду с тем, что величина смещения узла неподрессоренной стороны относительно неподрессоренной части определена в качестве «x(t)», как описано выше, уравнение движения в отношении неподрессоренной части представлено, как изложено ниже:
Следующая формула (4) получается посредством преобразования Лапласа по вышеприведенному уравнению (3):
Следует отметить, что «Fr(s)» является функцией, полученной преобразованием Лапласа от fr(t). То есть вторая передаточная функция G2(s) представлена в качестве G2(s)=-(C·s+k).
Вторая передаточная функция является передаточной функцией, согласно которой выдается фактическая действующая сила, когда вводится величина смещения узла неподрессоренной стороны относительно неподрессоренной части. Подстановкой формулы (2) в формулу (4) получается следующая формула:
Поскольку сила fA(t) привода, которой требуется формироваться приводом 30, определяется из условия, чтобы фактическая действующая сила fr(t) становилась равной требуемой действующей силе, сила привода рассчитывается согласно следующей формуле:
vi) Определение целевой силы привода
В модели, показанной на фиг.3, неподрессоренная часть неподвижна и принимается во внимание только перемещение узла неподрессоренной стороны относительно неподрессоренной части. Однако, поскольку сборка 20 пружины-поглотителя является смещенной в любой момент времени вследствие входного воздействия от колеса, желательно учитывать влияние смещения неподрессоренной части. Соответственно, модель сборки 20 пружины-поглотителя, показанной на фиг.4, на которой неподрессоренная часть смещается, рассматривается наряду с определением абсолютного смещения неподрессоренной части в качестве «x1(t)». Согласно модели считается, что узел неподрессоренной стороны будет иметь инерционную силу, имеющую модуль в соответствии с неподрессоренным вертикальным ускорением dx1(t)/dt. Поэтому F*(s), которая получена преобразованием Лапласа целевой силы f*(t) привода, представлена следующей формулой наряду с учетом инерционной силы m·dx1(t)/dt, чей модуль соответствует неподрессоренному вертикальному ускорению узла неподрессоренной стороны:
Соответственно, целевая сила привода определяется на основе: выходного значения, указывающего силу привода, когда требуемая действующая сила вводится в сложную передаточную функцию G(s)=(m·s2+C·s+k)/(C·s+k), которая установлена в качестве обратной функции от функции, которая является произведением первой передаточной функции и второй передаточной функции; и инерционной силы узла неподрессоренной стороны по отношению к смещению неподрессоренной части.
Уравнение движения в отношении узла неподрессоренной стороны и уравнение движения в отношении неподрессоренной части согласно модели, показанной на фиг.4, представлены следующими формулами (8) и (9) соответственно:
Следующие формулы (10) и (11) получаются посредством преобразования Лапласа по вышеприведенным уравнениям (8) и (9) соответственно:
Вышеприведенные формулы (10) и (11) организованы в следующую формулу:
То есть получается формула (12), подобная формуле (7).
Вышеуказанное преобразование Лапласа выполняется над непрерывными значениями, а именно аналоговыми данными. Однако требуемая действующая сила fN, которая должна подаваться в сложную передаточную функцию G(s), определяется каждый раз, когда выполняется программа, которая будет пояснена, а потому является дискретным значением по времени TS шага выполнения программы. Соответственно, целевая сила привода рассчитывается согласно передаточной функции G(z), полученной посредством дискретизации вышеуказанной сложной передаточной функции G(s) с использованием так называемого z-преобразования, которое может быть пояснено в качестве преобразования Лапласа на дискретной группе.
Будет кратно пояснен один из примеров z-преобразования. «an+1» определен в качестве «z·an», то есть an+1=z·an, где данные в определенный момент tn времени определены в качестве «a», а интервал выборки определен как «TS», и используется оператор «z», указывающий порядок дискретных данных. Аппроксимация «da(tn)/dt» с использованием дискретных данных дает следующую формулу:
Вышеприведенная формула (13) преобразуется с использованием «an+1=z·an», так что получается формула:
Кроме того, преобразование Лапласа от «da(tn)/dt» дает «s·A(s)». То есть оператор V Лапласа в формуле (7) замещается на «(1-z-1)/TS», а «F*(s)» и «FN(s)» в формуле (7) соответственно преобразуются в «f*» и «fN», каждое в качестве дискретных данных, с тем чтобы получить следующую формулу:
Поскольку «s2·1(s)» представляет неподрессоренное вертикальное ускорение, «s2·X1(s)» замещается неподрессоренным вертикальным ускорением Gzg, определенным датчиком 236 неподрессоренного вертикального ускорения. В этом отношении текущее выходного значение «G(z)» рассчитывается с использованием текущего входного значения и предыдущего входного значения и предыдущего выходного значения. Таким образом выполняется расчет согласно формуле (15), в силу чего определяется целевая сила f* привода.
Как описано выше, амортизатор 70 сконфигурирован из условия, чтобы его коэффициент C демпфирования делался разным в зависимости от направления сжатия и растягивания. Соответственно, первая передаточная функция и вторая передаточная функция изменяются в зависимости от направления относительного перемещения узла неподрессоренной стороны и неподрессоренной части. Более точно, коэффициент C демпфирования амортизатора 70, установленный в каждой из первой передаточной функции и второй передаточной функции, избирательно изменяется между коэффициентом Cc демпфирования в случае, где узел неподрессоренной стороны и неподрессоренная часть перемещаются друг к другу, и коэффициентом Ct демпфирования в случае, где узел неподрессоренной стороны и неподрессоренная часть перемещаются друг от друга. Относительное смещение узла неподрессоренной стороны и неподрессоренной части является разностью между: величиной перемещения подрессоренной части и неподрессоренной части к и от друг друга, определенной датчиком 224 высоты; и величиной относительного перемещения узла подрессоренной стороны и узла неподрессоренной стороны, оцененной по результату определения кругового датчика 242 положения. Соответственно, направление относительного перемещения узла неподрессоренной стороны и неподрессоренной части оценивается на основании результатов определения датчика 224 высоты и кругового 242 датчика положения.
Привод 30 управляется, чтобы формировать целевую силу f* привода, определенную, как описано выше. Действие двигателя 46 для формирования целевой силы f* привода управляется инвертором 204. Более точно, целевой коэффициент заполнения последовательности импульсов определяется на основании определенной таким образом целевой силы f* привода, и команда, основанная на определенном коэффициенте заполнения последовательности импульсов, отправляется в инвертор 204. Переключающие элементы инвертора 204 управляются, чтобы открываться и закрываться при надлежащем коэффициенте заполнения последовательности импульсов, в силу чего двигатель 46 приводится в действие, с тем чтобы формировать целевую силу f* привода.
vii) Управление изменением высоты
В настоящей системе 10 подвески также выполняется управление для изменения посредством пневматических рессор 34, высоты транспортного средства на основании стремления водителя, например, в попытке справиться с движением по поверхности дороги с высокой степенью неровности. В дальнейшем управление указывается ссылкой как «управление изменением высоты», где уместно. Управление изменением высоты будет кратко пояснено. Управление изменением высоты выполняется, когда целевая высота, которая является одной из предопределенных высот, которая должна быть реализована посредством действия переключателя 226 изменения высоты транспортного средства на основании намерения водителя. Для каждой из предопределенных высот заблаговременно устанавливается целевое подрессоренное-неподрессоренное расстояние для каждого из четырех колес 12. Действие устройства 160 подачи и выпуска воздуха управляется из условия, чтобы подрессоренные-неподрессоренные расстояния для соответственных колес 12 становились равными соответственным целевым расстояниям на основании значений, определенных соответственными датчиками 224 высоты, в силу чего подрессоренные-неподрессоренные расстояния для соответственных колес 12 изменяются подходящим образом в соответствии с целевой высотой. При управлении изменением высоты также выполняется так называемое автоматическое выравнивание для борьбы с изменением высоты транспортного средства, обусловленное изменением количества пассажиров, едущих на транспортном средстве, изменением веса грузов, перевозимых транспортным средством, и тому подобным.
3. Управляющая программа
Управление приводом 30, поясненное выше, выполняется из условия, чтобы программа управления приводом, показанная блок-схемой последовательности операций способа по фиг.5, многократно реализовывалась посредством ЭБУ 200 с временем TS шага, например, от нескольких миллисекунд до нескольких десятков миллисекунд, с замком 220 зажигания транспортного средства, помещенным во включенное состояние. В дальнейшем поток управления будет кратко пояснен со ссылкой на блок-схему последовательности операций способа. Программа управления привода выполняется для каждого из четырех приводов 30 соответственных сборок 20 пружин-поглотителей, предусмотренных для соответственных четырех колес 12. В последующем описании будет пояснена обработка посредством программы, выполняемой в одном из четырех приводов 30, в интересах краткости.
В программе управления приводом составляющая fV демпфирования колебаний, составляющая fR сдерживания крена и составляющая fP сдерживания продольного раскачивания определяются на этапе с S1 (в дальнейшем «этап» опущен там, где уместно) по S3 согласно способу, поясненному выше. Затем S4 реализуется для суммирования таких трех составляющих fV, fR, fP, посредством этого определяя требуемую действующую силу fN, которая действует между подрессоренной частью и неподрессоренной частью. Впоследствии, на S5, получается величина x относительного смещения узла неподрессоренной стороны и неподрессоренной части из разности между: величиной перемещения подрессоренной части и неподрессоренной части к и от друг друга, которая получена по результату определения датчика 224 высоты, и величиной относительного перемещения узла подрессоренной стороны и узла неподрессоренной стороны, оцененной по результату определения кругового датчика 242 положения. На S6 текущая величина относительного смещения и предыдущая величина относительного смещения сравниваются друг с другом и оценивается направление относительного перемещения узла неподрессоренной стороны и подрессоренной части. В тех случаях, когда оценено, что узел неподрессоренной стороны и неподрессоренная часть перемещаются друг к другу, реализуется S7 для установки коэффициента C демпфирования амортизатора 70 в Cc. В тех случаях, когда оценено, что узел неподрессоренной стороны и неподрессоренная часть перемещаются друг от друга, реализуется S8 для установки коэффициента C демпфирования амортизатора 70 в Ct.
Впоследствии, на этапе S9, выполняется расчет согласно передаточной функции G(s)=(m·s2+C·s+k)/(C·s+k), поясненной выше, посредством чего выдается сила fAпривода, которая должна вырабатываться приводом 30 согласно требуемой действующей силе fN, определенной на этапе S4 в качестве входного значения. Затем, на этапе S10, определяется целевая сила f*(=fA-m·Gzg) привода с учетом инерционной силы m·Gzg узла неподрессоренной стороны по отношению к смещению неподрессоренной части. Этап S10 сопровождается этапом S11, на котором коэффициент заполнения последовательности импульсов для управления двигателем 46 определяется на основе определенной силы f* привода, и команда на основе коэффициента заполнения последовательности импульсов отправляется в инвертер 204. Благодаря обработке управляется действие двигателя 46 у каждого привода 30, так что каждый привод формирует силу привода, которая требуется.
4. Функциональная структура контроллера
Считается, что ЭБУ 200, который выполняет вышеуказанное управление каждым приводом 30, должен иметь различные функциональные части для выполнения различных видов обработки. Чтобы быть более точным, ЭБУ 200 включает в себя функциональную часть для определения требуемой действующей силы посредством выполнения обработки на S1-S4 вышеуказанной программы управления приводом, а именно часть 300 определения требуемой действующей силы. Часть 300 определения требуемой действующей силы включает в себя: часть 302 управления демпфированием колебаний в качестве функциональной части для определения составляющей fV демпфирования колебаний; часть 304 управления сдерживанием крена в качестве функциональной части для определения составляющей fR сдерживания крена и часть 306 управления сдерживанием продольного раскачивания в качестве функциональной части для определения составляющей fP сдерживания продольного раскачивания. ЭБУ 200 включает в себя часть 308 зависимого от передаточной функции расчета в качестве функциональной части для расчета согласно сложной передаточной функции, в которую вводится требуемая действующая сила и которая установлена в качестве обратной функции у функции, которая является произведением первой передаточной функции и второй передаточной функции. Часть, которая выполняет обработку на S5-S9 программы, соответствует части 308 зависимого от передаточной функции расчета. Часть 308 зависимого от передаточной функции расчета включает в себя часть 310 изменения передаточной функции, которая выполняет обработку на S5-S8 программы и которая изменяет первую передаточную функцию и вторую передаточную функцию посредством изменения коэффициента демпфирования амортизатора в зависимости от направления относительного перемещения узла неподрессоренной стороны и неподрессоренной части. ЭБУ 200 дополнительно включает в себя часть 312 зависимой от инерционной силы коррекции, которая выполняет обработку на S10 программы и которая корректирует на основе инерционной силы узла неподрессоренной стороны по отношению к смещению неподрессоренной части выходное значение, указывающее силу привода, выдаваемую из части 308 зависимого от передаточной функции расчета, с тем чтобы определять целевую силу привода. Часть 314 определения целевой силы привода создана включением в состав части 300 определения требуемой действующей силы, части 308 зависимого от передаточной функции расчета и части 312 зависимой от инерционной силы коррекции. ЭБУ 200 дополнительно включает в себя часть 316 управления изменением высоты, которая выполняет изменение высоты транспортного средства посредством пневматических рессор 34.
В настоящей системе 10 подвески целевая сила привода определяется на основе: (a) требуемой действующей силы, которая требуется для действия между подрессоренной частью и неподрессоренной частью благодаря приводу 30 и соединительному механизму 32; и (b) инерционной силы узла неподрессоренной стороны по отношению к смещению неподрессоренной части наряду с использованием: первой передаточной функции, которая является передаточной функцией, согласно которой выдается величина смещения узла неподрессоренной части относительно неподрессоренной части, когда вводится сила привода; и второй передаточной функции, которая является передаточной функцией, согласно которой выдается фактическая действующая сила, которая является силой, которая фактически действует между подрессоренной частью и неподрессоренной частью, когда вводится величина смещения. Соответственно, компоновка обеспечивает надлежащую силу, которая фактически действует на подрессоренную часть и неподрессоренную часть в результате передачи силы привода через соединительный механизм 32. Другими словами, настоящая система 10 предотвращает ухудшение комфорта во время движения транспортного средства, управляемости и устойчивости транспортного средства и так далее, что является результатом последовательной компоновки соединительного механизма по отношению к приводу.
Модифицированные варианты осуществления изобретения
В системе согласно проиллюстрированному варианту осуществления часть определения целевой силы привода сконфигурирована из условия, чтобы требуемая действующая сила подавалась в сложную передаточную функцию G(s), установленную в качестве обратной функции от функции, которая является произведением первой передаточной функции и второй передаточной функции, как показано на фиг.7(a). Часть определения целевой силы привода может быть сконфигурирована из условия, чтобы целевая сила привода рассчитывалась с использованием сложной передаточной функции H(s), показанной на фиг.7(b). Сложная передаточная функция H(s) является передаточной функцией, которая является приближением к передаточной функции G(s) в проиллюстрированном варианте осуществления и представлена, как изложено ниже:
H(s)=G'(s)/{1+G'(s)·A(s)}
В вышеприведенной формуле «G'(s)» и «A(s)» являются передаточными функциями, представленными следующими формулами соответственно:
G'(s)=P+I/s+D·s
A(s)=(C·s+k)/(m·s2+C·s+k)
В вышеприведенных формулах «P», «I» и «D» являются пропорциональным коэффициентом усиления, интегральным коэффициентом усиления и дифференциальным коэффициентом усиления соответственно и установлены в соответствующие значения, с тем чтобы приближаться к передаточной функции G(s) в проиллюстрированном варианте осуществления. Передаточная функция G(s) в проиллюстрированном варианте осуществления является линейной функцией по отношению к «s» наряду с тем, что передаточная функция A(s) в модифицированном варианте осуществления является функцией, содержащей член «1/s». Соответственно, передаточная функция A(s) в модифицированном варианте осуществления обеспечивает устойчивое вычисление по сравнению с передаточной функцией G(s) в проиллюстрированном варианте осуществления.
Реферат
Изобретение относится к системе подвески транспортного средства, включающей в себя электромагнитный привод. Система содержит электромагнитный привод, соединительный механизм, контроллер. Электромагнитный привод содержит узел подрессоренной стороны, узел неподрессоренной стороны, электромагнитный двигатель. Соединительный механизм содержит опорную пружину. Контроллер содержит часть определения целевой силы привода и выполнен с возможностью управления силой привода. Часть определения целевой силы привода определяет целевую силу привода на основе требуемой действующей силы и инерционной силы наряду с использованием первой передаточной функции и второй передаточной функции. Первая передаточная функция является функцией, согласно которой выдается величина смещения узла подрессоренной стороны и узла неподрессоренной стороны относительно подрессоренной части и неподрессоренной части, когда вводится сила привода. Вторая передаточная функция является функцией, согласно которой выдается фактическая действующая сила между подрессоренной частью и неподрессоренной частью, когда вводится величина смещения. Технический результат заключается в улучшении управляемости и устойчивости транспортного средства. 7 з.п. ф-лы, 7 ил.
Комментарии