11з()б Н гение относится к средствам .механизации се,()зяйственных процессов
н ус.човиях наклонного расположения полей, преимущественно к тракторам для возде-
. 1ывания iiponaiHHbix культур.
Це/И) и (обретения повышение качества
вы11о,1няемы рабог сельскохозяйственных (iHe|iaiuiii мхтем повьипения .курсовой устой-
чиносги при с)Х)анении параллельно обра- багынаемо HOBCJIXHOCTH склона положения
4;Hu4ii(MiH)ii на ocTOFi сельскохозяйстнен О , а гакже у,|уч111е1П1Я агротехн.-че
ской BiHicbnuii MOCTH трактора н межд- ря.аья пропа Н1НЫХ Ky.iiiTy р.
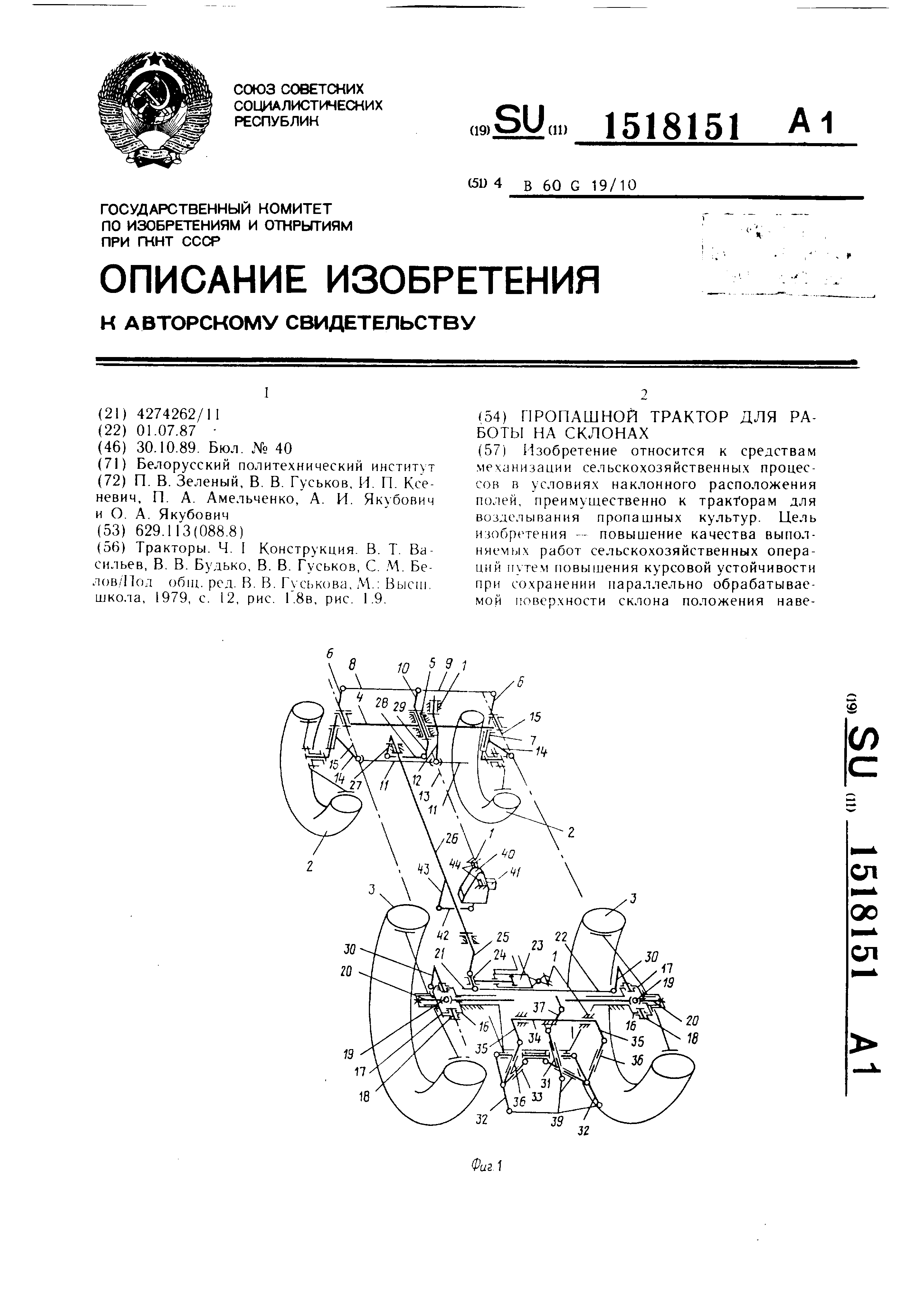
Па (()И1 1 и 1()б|)ажена пространственная кинема ическа:-: схема Hjioiiannioro трактора;
на фиг. 2 II .1 ва)нанты установки датчика крепа; на фиг. 4 схема к определению
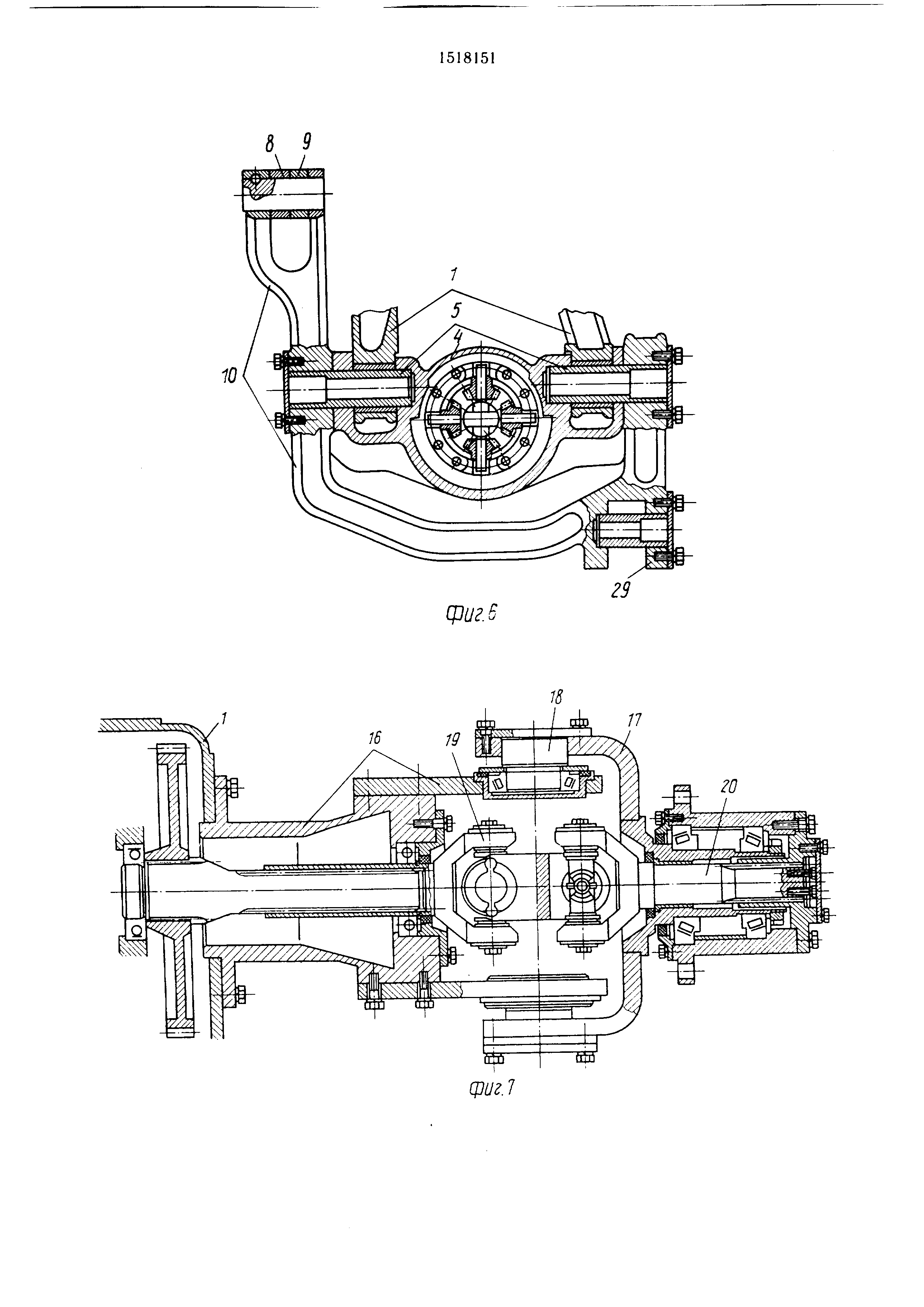
|)асп(1.1(1жения осей поворота KO. iec; на фиг. 5 и (т конструкция нереднег о моста
трактора; на фиг. 7 конструкция шкворневого .механи: ма задних ко.чес; на фиг. 8
ки нема гическая связь колес; на фиг. 9 и 10 принцип работы устройства.
Пропашной rptiKTOp д,1я работы на скло- па. содержит остг)п 1, объединяющий двигатель
, трансмиссию, верхнее строение трактора . Остов опирается на ходовую часть,
сос1() из передних управляемых Ko, iec 2 ма,1ого диаметра и задних ведущих колес 3
бо, 1ыного .чиаметра. Передние ко,чеса связаны с остово.м посредством поперечной балки
4, своб(;1дно качающейся вокруг горизон- та.ч1)П(Л () нарнира 5, позволяя колесам копировать
ре,чьеф опорной поверхн(к-ти. К конпам балки прикреплены на горизонталь-
пьгх шарнирах бортовые рычаги 6, нижние концы которых fiecyT поворотные цапфы 7
передних ко,чес, а верхние 1 1арнирно связаны между собой 1осредств(ш поперечных тяг 8
и ). Тяги соединены между собой поворот- кронштейном 10, установленным на остове
с возможностью поворота вокруг оси качания поперечной балки. Поворотные
нанфы 7 д.чя свя.зи с ру.чевым механизмом
снабжены рулевой трапецией, Г1оперечные
тяги 11 рулевой трапеции обеспечивают связь цапф с поворотной сошкой 12, приче.м
точка шарнирного соединения тяг и сотки лежит на прямой 13, совпадающей с осью
качания поперечной балки, а точки njapnnpHbix соединений тяг с рычагами 14 цапф лежат
на прямых 15, совпадающих с ося.ми горизонтальных шарниров крепления бортовых
рычагов с балкой. Эти кинематические условия необходимы для исключения влияния
процесса качания балки и поворота бортовых рычагов на ней на управление перед-
иими колесами. В случае выполнения передних колес ведущими балка, бортовые рычаги
и цапфы выполнены полыми для размещения в них элементов привода, образуя передний ведущий мост.
Колеса 3 заднего моста снабжены механизмом стабилизации их в вертикальном
положении. Для этого на остове имеются два шкворневых устройства. Каждое шкворневое
устройство имеет неподвижную цапфу 16, установленную на остове, и поворотную
цапфу 17, на которую непосредственно опирается колесо 3 своей ступицей. Цапфы
соединены между собой кольцами 18, образующими горизонтальный шарнир. Соосно
общей оси пальцев между цапфами располож н шарнир 19 карданного вала 20 привода
кол- С. Поворотные цапфы связаны между собой посредством поперечных тяг 21 и 22,
обеспечивающих согласованный поворот колес в вертикальной поперечной плоскости.
Поперечные тяги 21 и 22 снабжены приводом
перемещения от силового цилиндра 23, один
конец которого щарнирно связан с остовом, а второй -- с тягами посредством пальцев 24.
Этот же na,iien обеспечивает связь тяг 21 и 22 с рычагом 25 продольного вала 26. Второй
конец вала 26 также снабжен рычагом 27,
шарнирно связанным поперечной тягой 28
с рычагом 29, выполненным на поворотном кронштейне 10. Вал 26 установлен на остове
с возможностью поворота.
Для согласования кинематики поворота
передних 2 и задних 3 колес в поперечных вертикальных плоскостях, обеспечивающей
их одинаковое угловое положение, рычаг 27 равен по длине рычагу 29 и параллелен ему,
а рычаг 25 равен по длине рычагам 30 поворотных цапф и также параллелен им.
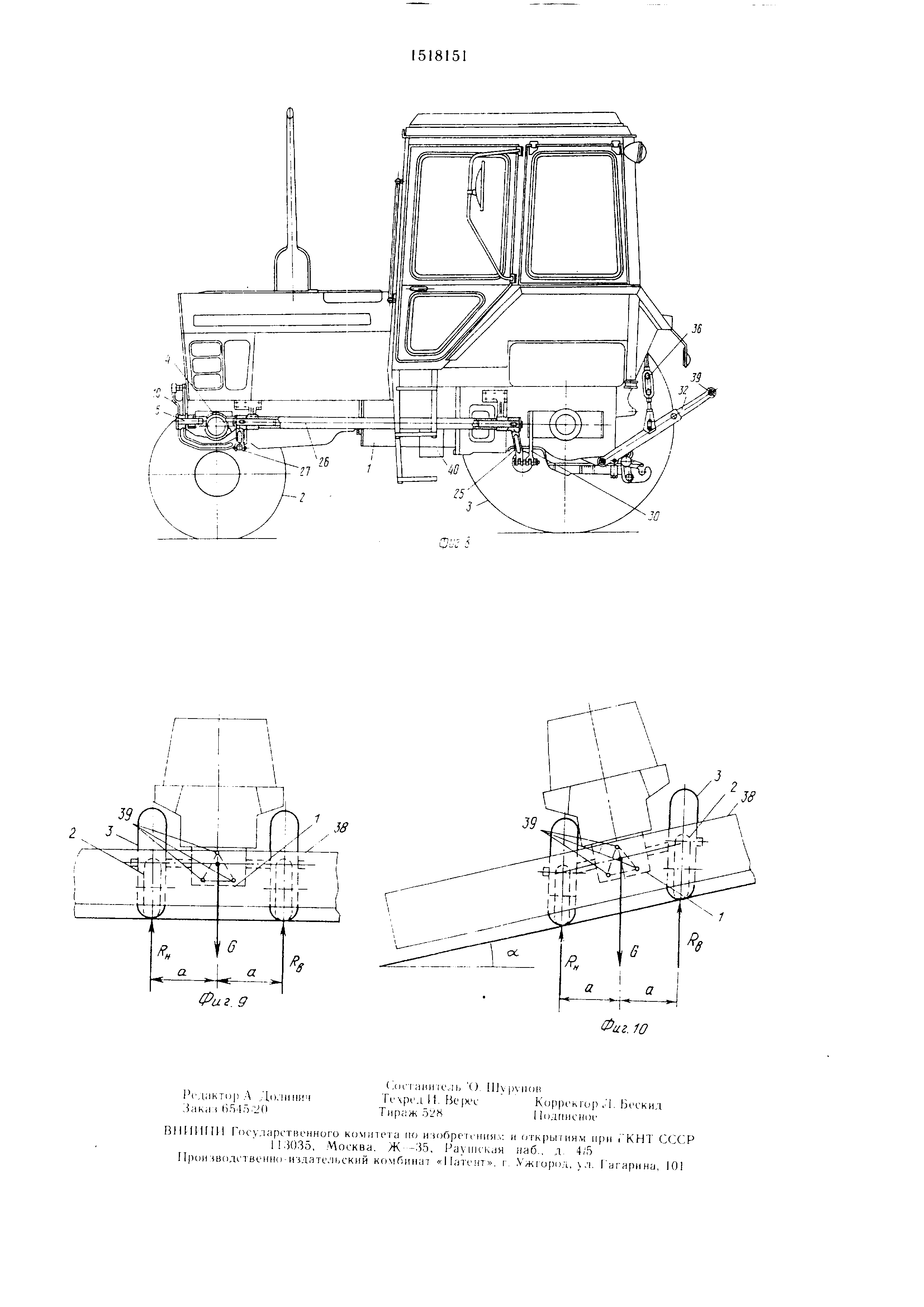
В задней части в непосредственной близости от задних колес 2 на остове установлен
механизм навески сельскохозяйственных машин, выполненный по трехточечной схеме
и включающий: центральную тягу 31, нижние тяги 32 с раскосами 33 и привод подъема
и опускания нижних тяг, состояи1,ий из поперечного вала 34, связанных с его рычагами
35 вертикальных тяг 36 и силового цилиндра (на схемах не показывается), соединенного
с поперечным валом посредством плеча 37. Раскосы, центральные и вертика,ть-
ные тяги выполнены регулируемой длины для корректировки положения навесной м
шины 38, подсоединяемой .иарииром 39 на концах тяг.
Силовой ци,пиндр 23 подсоединен к гидросистеме трактора. Управление подачи
жидкости в его гихчости может ocyiij ocTB- ляться ) путем ноздейпвия водителя
на рычаг гидрораспределителя гидросистемы (не показано) или же автоматически. Во
втором случае тракт()) снабжаю датчиком крена (вертика,:|и), распс1. :оженпым п т-
дельном корпусе 40. В качестве датчика может быть использован маятник, подримиен-
ный в корпусе 40 на горизонтальной оси и кинематически связанный с золотником спе-
1|иального гидрораспределителя 41, чере:-, который силовой цилиндр 23 сообщен с гидросистемой
тракто|)а. Г идрораспределитель установлен на корпусе 40 датчика, f avi датчик
установлен на остове с возможн()стьк) поворота вокруг оси, пара, 1лельн()й оси подвеса
маятника, и кинематически С11язап с поворотными цапфами (внутреннее ycTpoii-
ство датчика и гидрорасч1ределителя на схеме не изображено).
Кинематическая связь корпуса 41) датчика с цапфами может бьпь выги).1Н( гак.
чтобы датчик занима, такое же по. южеиие в поперечной вертикальной плоскости, что и колеса.
Кинематическая связь (фиг. 1) вьпюл- нена посредством тяги 42 и шарнирно связанного
с ней плеча 43, несомого продо,тьным валом 26. Второй конец тяги шарнирно соединен
с нижней частью корпуса 40. Верхней частью корпус 40 становлен на остове посредством
полуосей 44, соосных оси подвеса маятника. Л.чина плеча 43 равна расстоянию
от полуосей 44 до шарнира крепления к корпусу тяги 42 для согласования кинематики
поворота корпуса и цапф 17.
Возможно непосредственное креп, 1ение
корпуса 40 датчика вертика,ти на продо, 1ь- ном валу (фи1. 2) и.-1и же обьедипение кор0
пуса 40 с рычагом 25 для снижения метал лоемкости устройства и упрощения конструкции (фиг. 3).
Соблюдение соосности осей поворота корпуса и подвеса маятника необходимо
для обеспечения устойчивой работы датчика вертикали (сведения к минимуму в,пияния
факторов могущих вызвать раскачивание маятника при срабатывании системы). С
этой же целью ось подвеса маятника целесообразно располагать вблизи центра масс трактора.
Поскольку трактор является пропашным, то для вписывае.мости его в междурядья
культурных растений необходимо, чтобы 5 передние колеса вписывались при стабилизации
в поперечный габарит задних (фиг. 4). Зто требование налагает ограничение на
относительную высоту расположения осей 15 шарниров бортовых рычагов и осей 18 поворота
цапф. Очевидно, что есми не пред ста11 1яе1ся воз.можным обеспечить одну
высоту расположения этих осей, то в соответствии со схемой на фиг. 4 разность высот
должна удовлетворять неравенству
8-6
0
5
/У;
1ме // разность высот расгиможенпя шар- Hiipo ti поио)ота цапф и 6opT)Biii piiiMarois
| Л,1Я Ы их геометрическим осям); В ;i Ь 111И|1Иг1а профи,тей ко,пес соответственно за.;него
и переднего мостов; а
преде,1ьныи
0
(1 склона, на котором возможно механи- зщюванпое возделывание пропашных ку. н,тур .
/1ля иск. цочения дополнительного крена
- ;)с-1ова трактора при стабилизации задних
Ko.iec в вертика, 1ьном положении г еометрические оси пальцев 18 должны распо.чагаться
в продольных плоскостях симметрии колес.
вариант конкретной конструктивной про0
работки устройства стабилизации ко,пес П)(1мените,пьно к трактору «Бе.тарусь «.МТЗ
83- и,ч. юстрирован схемами, где на фиг. 5 I h установка новоротного кронштейна 10
на оси. качания попе)ечной балки 4 переднего моста; на фиг. 7 конструкция 1нквор5
нево| о механизма колес заднего моста; па ( 8 - продольный вал 26 с рычагами 27
и 25 на концах, обеепечиваюший кинематическую связь поворотных цапф задних
колес с бортовыми рычагами передних колес. Устройство работает следующим об- р а зо м.
В равнинных ус.човиях движения, когда возможные наклоны опорной поверхности
незначительны и не могут существенно по- в.лиять на курсовую устойчивость против
5 опрокидывания трактора, в агрегате с навесной машиной систему стабилизации колес
отключают, например, заблокировав по.чости силового цилиндра 23 специально предусмотренным для этой цели краном в вертикальном положении колес.
При включенной системе стабилизации колес блокированием полостей силового
цилиндра 23, а также сообщением одной из них с источником давления рабочей жидкости
, а второй - со сливом, гидросистемой трактора управляет гидрораспределитель 41
датчика крена. В положении колес 2 и 3, а также кинематически связанного с ними
корпуса 40 датчика, близком к вертикальному (в пределах чувствительности датчика)
золотник гидрораспределителя 41 удерживается маятником датчика в нейтральном
положении, запирая полости гидроцилиндра 23. При крене колес, а следовательно,
и корпуса 40 в одну из сторон маятник датчика , продолжая занимать вертикальное
положение, переключает золотник гидрораспределителя 41 в одну из крайних позиций,
сообщив соответствующую полость силового цилиндра к источнику давления рабочей
жидкости. Вторая полость окажется сообщенной со сливом гидросистемы. Под давлением
рабочей жидкости силовой цилиндр перемещает тяги 21 и 22 в поперечном направлении
в соответствующую сторону, обеспечив возвращение колес 3 в вертикальное
положение, одновременно с перемещение.м тяг 21 и 22 получит вращение вал 26 и кинематически
связанный с ним кронщтей); При вращении кронщтейна тяги 8 и 9 переднего
моста будут перемещаться в поперечном направлении, обеспечивая поворот в вертикальное
по. южение бортовых рычагов 6 и несомых и.1и передних колес 2. Поворот
продольного ва;1а 26 обеспечит также возвращение в вертикальное положение корпуса
40 датчика крена. Как только это произойдет , золотник гидрораспределителя 41
окажется возвращенным в исходную нейтральную позицию, заперев полости силового
цилиндра до очередного крена колес.
Формула изобретения
1. Пропапжой трактор для работы на склонах, содержащий остов, балку заднего
моста, ходовую часть, гидросисте.му и механизмы навешивания сельскохозяйственных
мащин, установленные на остове, причем передние управляемые колеса выполнены
меньшего диаметра, чем задние ведущие.
0
0
и связаны с остовом посредством поперечной
свободно качающейся на продольно-горн- зонтальном шарнире балки с вертикально
установленными на ее концах бортовыми
рычагами, несущими оси колес, отличающийся
тем, что, с целью повышения качества выполняемых работ сельскохозяйственных
операций путем повышения курсовой устойчивости при сохранении параллельного обрабатываемой
поверхности склона положения навешенной на остов машины, а также улучшения агротехнической вписываемости
трактора в междурядья пропашных культур, балка заднего моста снабжена установленными
на ее концах шкворневыми механиз5 мами, выполненными в внде двух, поворотной
и неподвижной, связанных горизонтальным шарниром цапф, несущих оси задних
колес, а на поперечной балке установлен с возможностью поворота вокруг шарнира
ее качания двуплечий вертикально расположенный рычаг, причем верхнее плечо рычага
шарнирно связано поперечными тягами с бортовыми рычагами балки, установленными
на ней с возможностью поворота в поперечной вертикальной плоскости, а нижнее
5 плечо рычага кинематически связано посредством тяг и продольного вала с поворотными
цапфами, несущими оси задних колес и снабженными управляемым приводом поворота.
2.Трактор по п. 1, отличающийся тем, 0 что управляемый привод поворота цапф
выполнен в виде силового цилиндра, подключенного к гидросистеме трактора через
авто.матически управляемый датчиком вертикали гидрораспределитель, причем датчик
вертикали, выполненный в виде подвешен- 5 ного на горизонтальной оси маятника, установлен
на продольном валу и ось его подвеса совпадает с осью поворота продольного вала.
3.Трактор по п. 1, отличающийся тем, что, с целью повышения устойчивости к опQ
рокидыванию, центр масс трактора в агрегате с навесной машиной расположен не
выше горизонтальных шарниров поворота цапф.
4.Трактор по п. 1, отличающийся тем, что, с целью повышения точности удержания
5 машины параллельно поверхности склона при повороте колес в вертнкальное положение
, горизонтальные шарниры поворота цапф расположены в продольных плоскостях симметрии колес.
26
Ци
25
фиг. 2
39
Фиг. 3
(риг. 5
Г
иг. 9
J(f


Комментарии