Электронная система управления клиренсом транспортного средства с большим количеством входных сигналов - RU2391222C2
Код документа: RU2391222C2
Чертежи












Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится в основном к системе подвески транспортного средства и, более конкретно, к электронному устройству управления клиренсом для регулирования клиренса транспортного средства.
Предпосылки к созданию изобретения
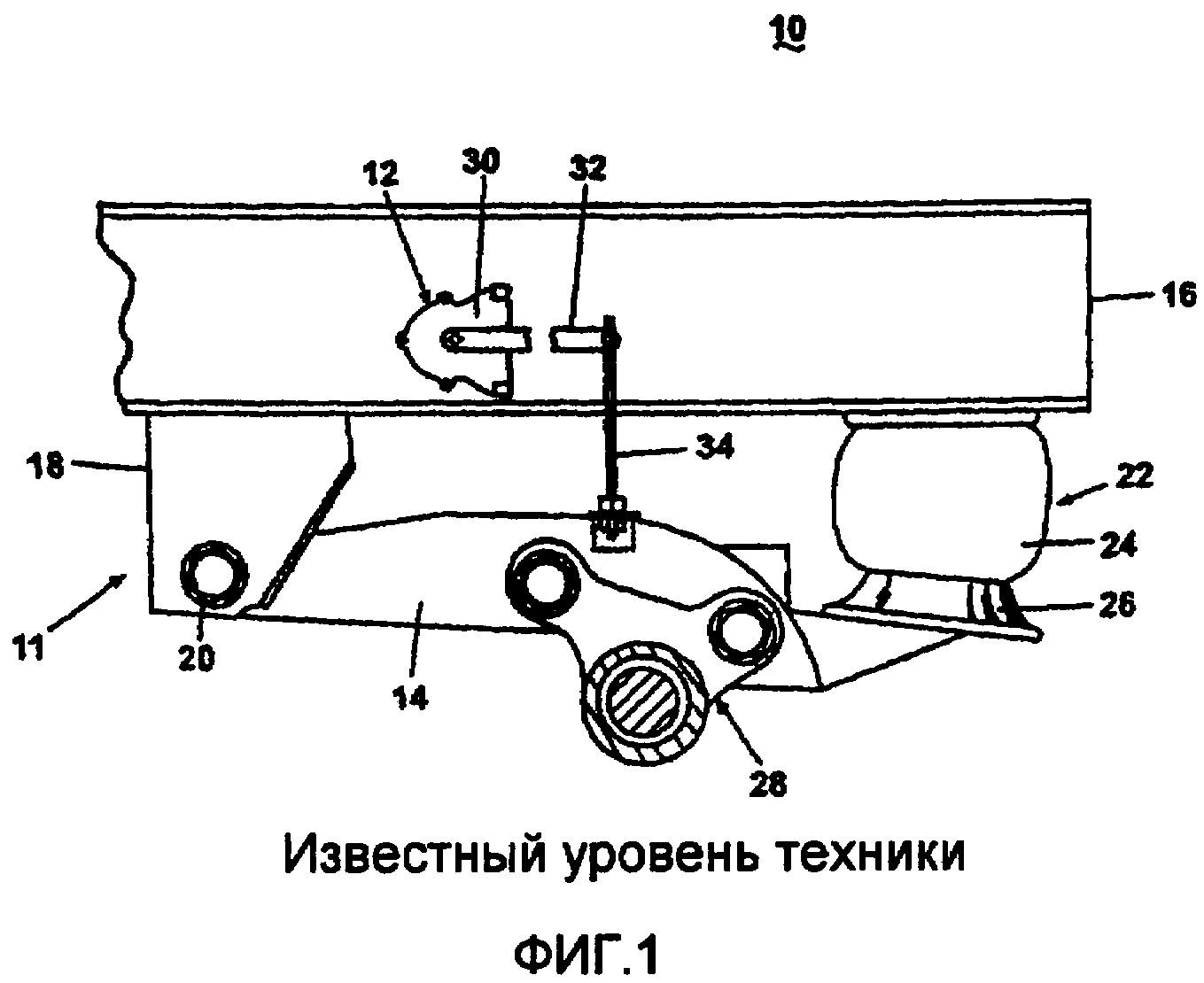
Системы подвески транспортных средств с механически соединенными и движимыми клапанами регулирования высоты хорошо известны. Фиг.1 изображает такую продольно-рычажную подвеску 10 с клапаном регулирования высоты 12. Продольно-рычажная подвеска 10 содержит расположенные напротив узлы продольных рычагов 11, закрепленные на противоположных сторонах транспортного средства, предпочтительно на лонжеронах 16 рамы транспортного средства. Каждый узел продольного рычага включает продольный рычаг 14, имеющий один конец, соединенный с возможностью вращения с подвесным кронштейном 18 с помощью шарнирного соединения 20. Подвесной кронштейн подвешен на лонжероне 16 рамы транспортного средства 16. Другой конец продольного рычага 14 крепится к пневматической рессоре 22, которая прикреплена к лонжерону 16. Пневматическая рессора 22 демпфирует поворот продольного рычага 14 вокруг подвесного кронштейна 18 относительно лонжерона 16 рамы.
Узел 28 оси колеса обычно соединяет и крепится или держится на продольных рычагах 14. Узел 28 оси колеса соединяется с возможностью вращения с колесом для сцепления с дорогой (не показано). Любое перемещение колес при их контакте с дорогой будет приводить к повороту продольных рычагов 14, которое сдерживается пневматическими рессорами 22.
Пневматические рессоры 22 обычно включают пневмоподушку 24 и поршень 26. Поршень 26 крепится к продольному рычагу 14, а пневмоподушка 24 соединяет поршень с рамой. Текучая среда под давлением может впускаться или выпускаться для регулирования амортизирующего эффекта пневматической рессоры. Кроме того, объем воздуха в пневматической рессоре может регулироваться для изменения высоты расположения лонжеронов рамы относительно продольных рычагов. Часто существует предпочтительный или базовый клиренс транспортного средства, и в зависимости от загрузки транспортного средства или дорожных условий фактический или существующий в данный момент клиренс может изменяться со временем. Сжатый воздух впускается или выпускается из пневмоподушек для регулирования относительной высоты лонжерона рамы кузова относительно продольных рычагов для поддержания клиренса кузова на базовой величине при конкретной загрузке или дорожных условиях.
Регулирование клиренса кузова осуществляется с помощью клапана регулирования высоты 13, который имеет впускное отверстие, рабочее отверстие и выпускное отверстие. Впускное отверстие соединено с возможностью прохождения текучей среды с источником сжатого воздуха для транспортного средства. Рабочее отверстие соединено с возможностью прохождения текучей среды с пневмоподушками 24 пневматических рессор, а выпускное отверстие соединено с возможностью прохождения текучей среды с атмосферой. Клапан регулирования высоты управляет соединением по текучей среде рабочего отверстия с впускным отверстием и выпускным отверстием для впуска или выпуска воздуха из пневматической рессоры, чтобы тем самым регулировать высоту транспортного средства.
Клапан регулирования высоты обычно крепится к раме 16 транспортного средства и имеет вращающееся плечо рычага 32, которое соединено с возможностью взаимодействия с продольным рычагом 14 через регулируемый стержень 34, посредством чего любое перемещение продольного рычага 14 вызывает соответствующее перемещение плеча рычага для перемещения клапана и соединения рабочего отверстия либо с впускным отверстием, либо с выпускным отверстием.
Традиционный клапан регулирования высоты имеет три положения: положение нагнетания, нейтральное положение и положение выпуска. В положении нагнетания плечо рычага 32 повернуто вверх, и рабочее отверстие соединено с впускным отверстием. В нейтральном положении 20 плечо рычага 32 обычно расположено горизонтально, и рабочее отверстие не соединено ни с впускным, ни с выпускным отверстием. В положении выпуска плечо рычага повернуто вниз, и рабочее отверстие соединено с выпускным отверстием.
Существующие в настоящее время различные клапаны регулирования высоты могут срабатывать с задержкой по времени или могут реагировать на изменения высоты без задержки. Конструкция таких клапанов обычно включает множество подпружиненных поршней или подобных элементов, которые уплотняют различные отверстия в ответ на относительное перемещение продольного рычага. Примеры клапанов регулирования высоты такого типа раскрыты в патенте США №5,161,579 от 10 ноября 1992 г., патенте США №5,560,591 от 1 октября 1996 г. и патенте США №5,375,819 от 27 декабря 1994 г.
Широко используемые клапаны регулирования высоты, независимо от их конструкции, подвержены повреждению вследствие механического соединения между продольным рычагом и клапаном регулирования высоты. На механическое соединение непосредственно влияют внешние условия работы продольно-рычажной подвески, которые могут быть очень тяжелыми. Кроме того, большинство клапанов с механическим приводом подвержены «застыванию», если не используются регулярно.
Учитывая недостатки клапанов регулирования высоты с механическим приводом и управлением, были разработаны устройства регулирования высоты с электронным управлением и электроприводом. Такие системы с электронным управлением обычно используют различные датчики для контроля высоты транспортного средства и используют клапаны с электроприводом, такие как электромагнитные клапаны, для управления впуском и выпуском воздуха из пневматических рессор. Одно такое устройство рассматривается в публикации патента США №2002/0096840 (Sulzyc и др.), где целью является создание устройства управления подъемом и опусканием корпуса транспортного средства с пневматической подвеской, включая управление уровнем. Патент Sulzyc и др. раскрывает устройство, которое включает избыточные линии электропитания, для того чтобы можно было использовать как электронное, так и механическое управление высотой. Однако устройство, предложенное Sulzyc и др., не решает проблему создания электронного устройства управления, которое может получать, обрабатывать и реагировать на большое количество входных сигналов, обеспечивая безопасное и точное регулирование высоты расположение кузова транспортного средства. Например, устройство, предложенное Sulzyc и др., не имеет входов для дистанционно вводимой заданной высоты расположения кузова или для сигнала сброса подачи текучей среды, или сигнала тормозной системы, такого как входной сигнал системы автоматического торможения (Automatic Braking System - ABS) или входной сигнал тормозной системы с электронным управлением (Electronic Braking System - EBS).
Сущность изобретения
Следовательно, требуется создать электронное устройство управления высотой, которое обеспечивает усовершенствованное управление системой подвески транспортного средства.
С этой целью было создано электронное устройство управления клиренсом транспортного средства для подвески, которая поддерживает мост, который несет на себе колеса для сцепления с дорогой. Данное электронное устройство управления поддерживает расположение кузова транспортного средства на базовой высоте относительно земли. Подвеска включает датчик высоты, который измеряет клиренс транспортного средства в данный момент и генерирует выходной сигнал, характеризующий клиренс в данный момент. Надуваемая пневмоподушка закреплена с возможностью управления между узлом колеса и транспортным средством, при этом впуск воздуха в пневмоподушку и выпуск воздуха из нее, соответственно, увеличивает и уменьшает относительное расстояние между узлом оси и транспортным средством для регулирования клиренса транспортного средства. Для накачивания пневмоподушки используется источник сжатого воздуха. Клапан селективно соединяет (связывает) с возможностью прохождения текучей среды пневмоподушку с источником сжатого воздуха или атмосферой, чтобы тем самым, соответственно, впускать или выпускать воздух из пневмоподушки.
Система управления клиренсом кузова характеризуется тем, что привод клапана соединен с датчиком высоты и с клапаном, при этом привод клапана получает в качестве входной информации выходной сигнал датчика высоты и селективно управляет перемещением клапана между нейтральным положением, в котором пневмоподушка не соединена с возможностью прохождения текучей среды ни с источником сжатого воздуха, ни с атмосферой; положением нагнетания, в котором пневмоподушка соединена с возможностью прохождения текучей среды с источником сжатого воздуха для впуска воздуха в нее; и положением выпуска, в котором пневмоподушка соединена с возможностью прохождения текучей среды с атмосферой для выпуска воздуха из нее. Путем соединения с возможностью прохождения текучей среды пневмоподушки либо с источником сжатого воздуха, либо с атмосферой привод клапана позволяет устройству управления клиренсом регулировать эту величину относительно базовой.
Предпочтительно, если привод клапана включает устройство управления, которое запрограммировано с помощью логики управления. Устройство управления использует выходной сигнал датчика высоты в сочетании с логикой управления для приведения в действие клапана для регулирования клиренса. Электродвигатель может быть установлен с приводом клапана и соединен с возможностью управления с устройством управления и соединен с клапаном, посредством чего устройство управления приводит в действие электродвигатель для селективного приведения в действие клапана.
Предпочтительно, если электродвигатель имеет выходную шестерню, которая входит в зацепление с раздаточным механизмом, прикрепленным к клапану таким образом, чтобы приведение в действие электродвигателя вращало выходную шестерню для вращения раздаточного механизма и тем самым обеспечивало перемещение клапана между положением нагнетания и положением выпуска. Предпочтительно, если электродвигатель является реверсивным, и устройство управления управляет электродвигателем в первом направлении для перемещения клапана в положение нагнетания и во втором направлении для перемещения клапана в положение выпуска. В одном предпочтительном варианте осуществления предусмотрено, что выходной шестерней является червячная шестерня.
Предпочтительно, если выходным сигналом датчика является сигнал напряжения, который имеет положительный или отрицательный знак, и устройство управления использует знак сигнала напряжения для определения направления работы электродвигателя. Предпочтительно, если логика управления является такой, чтобы устройство управления поддерживало на базовой величине клиренс транспортного средства. Устройство управления использует знак сигнала напряжения как индикатор, показывающий расположение транспортного средства выше или ниже базового дорожного просвета.
Устройство управления может включать, например, любое микропроцессорное устройство, программируемое или конфигурируемое логическое устройство (устройства), включая, например, конфигурируемые вентильные матрицы и подобные устройства, пригодные для обработки выходных сигналов датчиков и генерирования сигнала управления для приведения в действие клапана. Кроме того, в одном аспекте настоящего изобретения устройство управления предусматривает получение множества входных сигналов из различных источников, включая входы для дистанционно вводимой заданной высоты расположения кузова, или для сигнала сброса подачи текучей среды, или для сигнала тормозной системы, такого как входной сигнал системы автоматического торможения (Automatic Braking System - ABS) или входного сигнала тормозной системы с электронным управлением (Electronic Braking System - EBS) для обеспечения усовершенствованного управления системы подвески транспортного средства.
Предпочтительно, если клапан содержит впускное отверстие для соединения с источником сжатого воздуха, отверстие пневмоподушки для соединения с возможностью прохождения текучей среды с пневмоподушкой, выпускное отверстие для соединения с возможностью прохождения текучей среды с атмосферой и вращающийся элемент клапана, имеющий канал управления, который селективно соединяет с возможностью прохождения текучей среды отверстие пневмоподушки с впускным отверстием или выпускным отверстием при вращении элемента клапана. Клапан может также включать в себя корпус клапана, который образует внутреннюю камеру, с которой впускное отверстие, отверстие пневмоподушки и выпускное отверстие соединены по текучей среде.
Элемент клапана может разделять с невозможностью прохождения текучей среды впускное отверстие и выпускное отверстие. В такой конфигурации сжатый воздух, поступающий в корпус из впускного отверстия, будет перемещать элемент клапана на уплотняющую опору на корпусе клапана. Предпочтительно, если элементом клапана является вращающийся диск и может быть расположен на неподвижном диске, прикрепленном к корпусу. В одном варианте осуществления вращающийся и неподвижный диски могут быть из керамических или других подобных материалов.
Предпочтительно, если датчиком высоты является преобразователь, включающий оптический датчик, такой как светоизлучающий диод или лазер, и оптическое кодирующее устройство, емкостный датчик, датчик на эффекте Холла, такой как датчик переменного сопротивления или магнитострикционный датчик, ультразвуковой датчик или комбинации из них.
В другом аспекте настоящее изобретение относится к подвеске транспортного средства с регулируемой высотой. Подвеска включает узел оси колеса для удержания колес для сцепления с дорогой, которые приспособлены для прикрепления с возможностью перемещения к транспортному средству. Предусмотрен датчик высоты, который измеряет высоту расположения кузова транспортного средства в данный момент и генерирует выходной сигнал, характеризующий высоту расположения кузова в данный момент. Надуваемая пневмоподушка подсоединена с возможностью управления между узлом оси на транспортном средстве, посредством чего впуск воздуха в пневмоподушку и выпуск воздуха из нее, соответственно, увеличивает и уменьшает относительное расстояние между узлом оси и транспортным средством для регулирования клиренса транспортного средства. Источник сжатого воздуха используется для надувания пневмоподушки. Предусмотрен клапан для селективного соединения с возможностью прохождения текучей среды пневмоподушки с источником сжатого воздуха или атмосферой, чтобы тем самым, соответственно, впускать или выпускать воздух из пневмоподушки.
Подвеска с регулируемой высотой включает привод клапана, соединенный с датчиком высоты и клапаном, при этом привод клапана получает в качестве входной информации выходной сигнал датчика высоты и селективно перемещает клапан между нейтральным положением, в котором пневмоподушка не соединена ни с источником сжатого воздуха, ни с атмосферой; положением нагнетания, в котором пневмоподушка соединена с возможностью прохождения текучей среды с источником сжатого воздуха для впуска воздуха в нее; и положением выпуска, в котором пневмоподушка соединена с возможностью прохождения текучей среды с атмосферой для выпуска воздуха из нее и тем самым регулирования клиренса на основе величины клиренса в данный момент, измеряемого с помощью датчика высоты.
Используемые здесь термины «соединенный», «соединенный с», «связанный с» означают взаимосвязь между двумя или более устройствами, аппаратами, файлами, программами, средами, компонентами, сетями, системами, подсистемами и/или средствами, образующими какое-либо одно или более (а) соединение, либо прямое, либо через одно или более других устройств, аппаратов, файлов, программ, сред, компонентов, сетей, систем, подсистем или средств, (b) связь, либо прямую, либо через одно или более других устройств, аппаратов, файлов, программ, сред, компонентов, сетей, систем, подсистем или средств, и/или (с) функциональную зависимость, в которой работа какого-либо одного или более устройств, аппаратов, файлов, программ, сред, компонентов, сетей, систем, подсистем или средств зависит, полностью или частично, от работы какого-либо одного или более других из них.
Используемый здесь термин «данные» означает любые признаки, сигналы, знаки, символы, области, наборы символов, изображения и любую другую физическую форму или формы представления информации, будь то постоянные или временные, визуальные, звуковые, акустические, электрические, магнитные, электромагнитные или какие-либо другие. Подразумевается, что термин «данные», используемый здесь для представления заранее установленной информации в одной физической форме, охватывает любое и все представления той же самой заранее установленной информации в другой физической форме или формах.
Используемый здесь термин «сеть» включает как сети, так и объединенные сети всех видов, включая Интернет, и не ограничивается какой-либо конкретной сетью или объединенной сетью.
Другие цели настоящего изобретения и его конкретные особенности и преимущества станут более понятными из рассмотрения следующих чертежей и сопровождающего их подробного описания.
Краткое описание чертежей
Фиг.1 изображает вертикальный вид сбоку продольно-рычажной подвески, соответствующей известному уровню техники, включающей известный клапан регулирования высоты с механическим управлением и приводом;
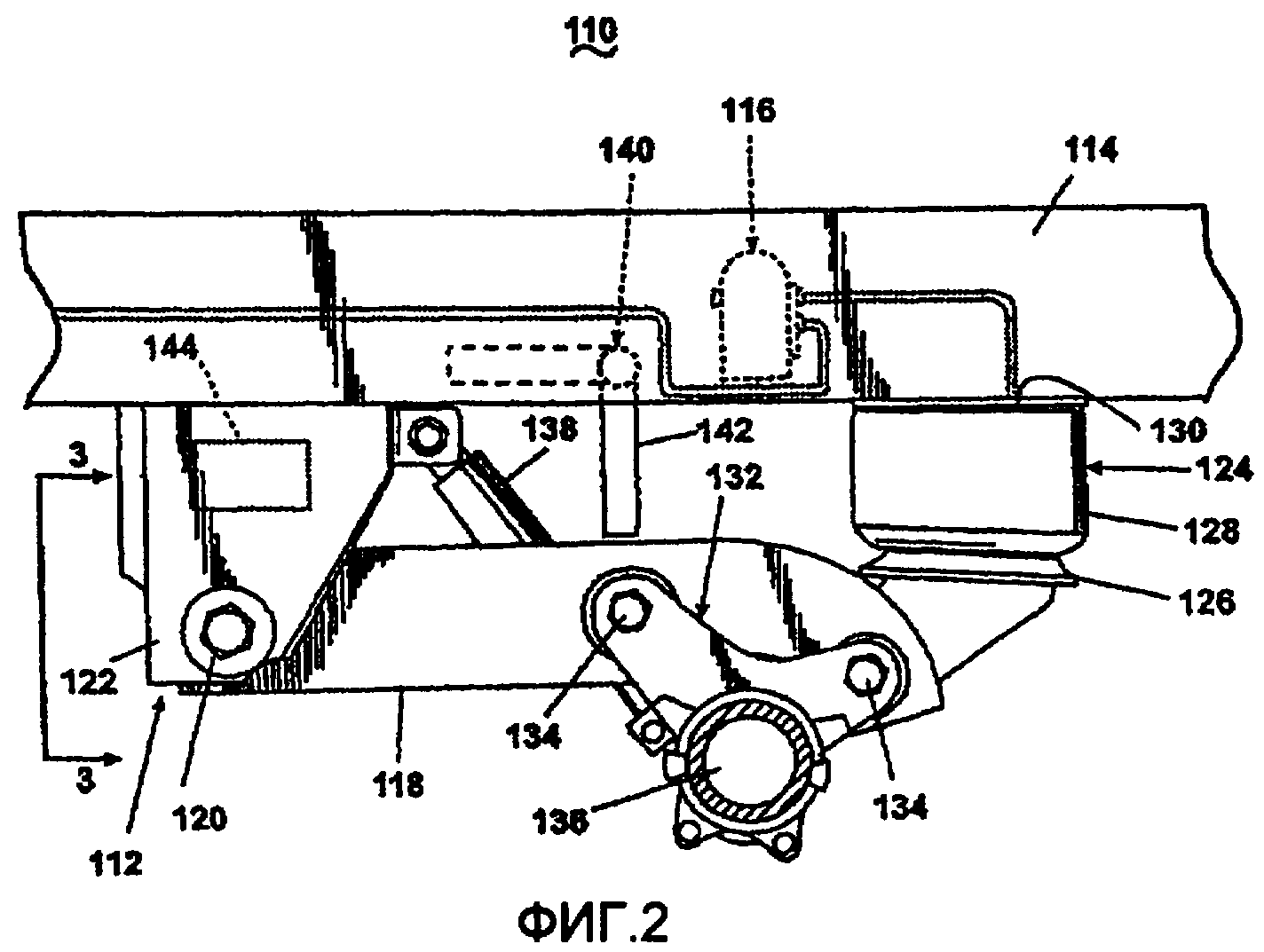
Фиг.2 изображает вертикальный вид сбоку продольно-рычажной подвески с устройством управления высотой в соответствии с настоящим изобретением, включающей датчик высоты, соединенный с клапаном регулирования высоты, оснащенным электродвигателем, с помощью устройства управления;
Фиг.3 изображает вид с торца с частичным разрезом по линии 3-3 в соответствии с Фиг.2, иллюстрирующий механическое соединение между датчиком высоты и продольно-рычажной подвеской;
Фиг.4 изображает вид в разрезе датчика в соответствии с Фиг.2 и 3 и показывающий излучатель света для датчика в исходном положении относительно оптического моста узла светочувствительных датчиков;
Фиг.5 идентична Фиг.4 за исключением того, что излучатель света показан в альтернативном положении относительно оптического моста;
Фиг.6 изображает перспективный вид с пространственным разделением элементов клапана регулирования высоты, оснащенного электродвигателем, в соответствии с настоящим изобретением с частью корпуса, удаленной для наглядности;
Фиг.7 изображает вид сверху корпуса клапана регулирования высоты в соответствии с Фиг.6 с крышкой и узлом клапана, удаленными для наглядности;
Фиг.8 изображает вид в разрезе по линии 8-8 в соответствии с Фиг.7, иллюстрирующий каналы 20 прохождения текучей среды через корпус;
Фиг.9 изображает увеличенный перспективный вид неподвижного сдвигового диска узла клапана в соответствии с Фиг.7;
Фиг.10 изображает перспективный вид, показывающий подвижный сдвиговый диск узла клапана в соответствии с Фиг.7;
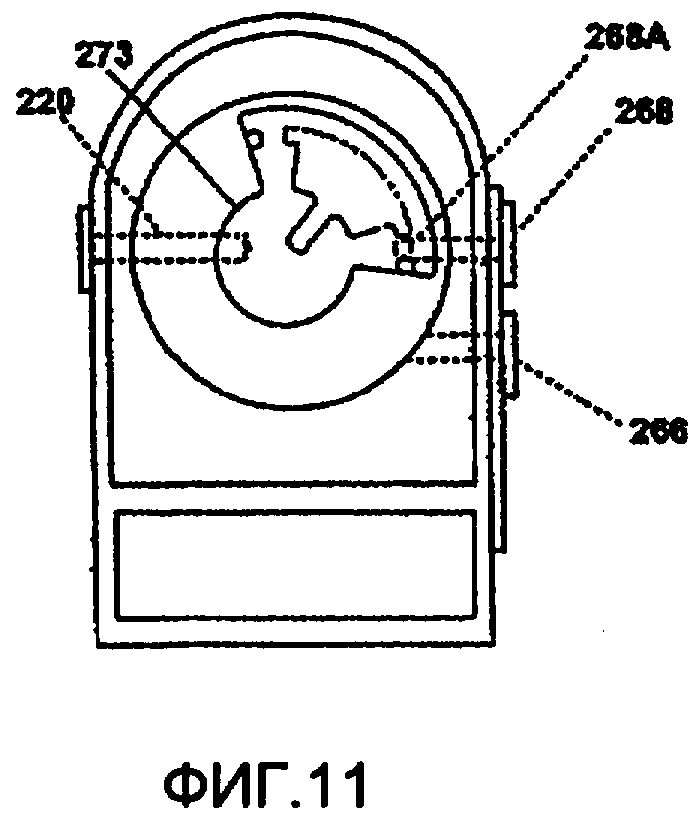
Фиг.11 изображает схематичный вид, иллюстрирующий клапан регулирования высоты в соответствии с Фиг.7 в нейтральном положении;
Фиг.12 изображает схематичный вид, иллюстрирующий клапан регулирования высоты в соответствии с Фиг.7 в положении нагнетания;
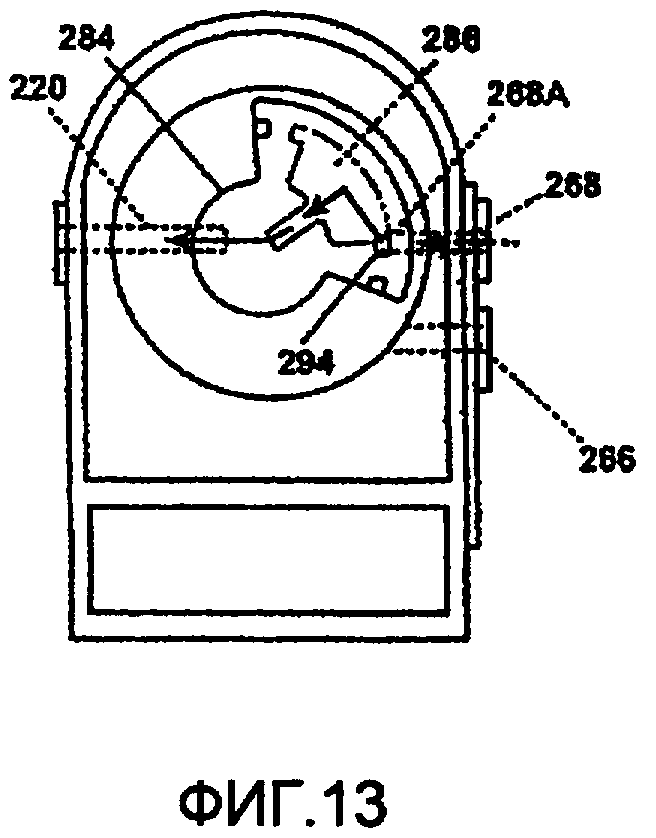
Фиг.13 изображает схематичный вид, иллюстрирующий клапан регулирования высоты в соответствии с Фиг.7 в положении выпуска;
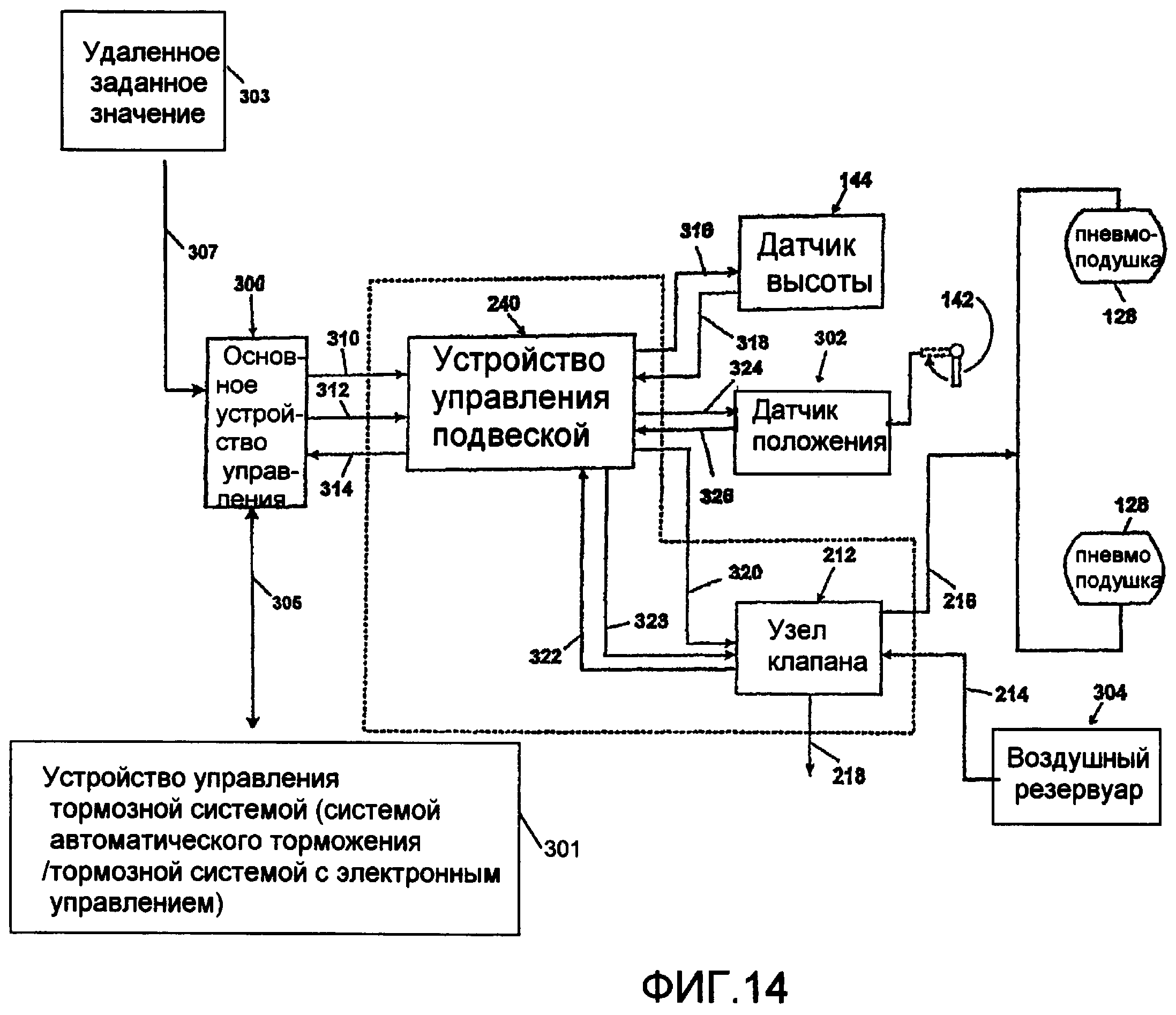
Фиг.14 изображает блок-схему управления в соответствии с настоящим изобретением;
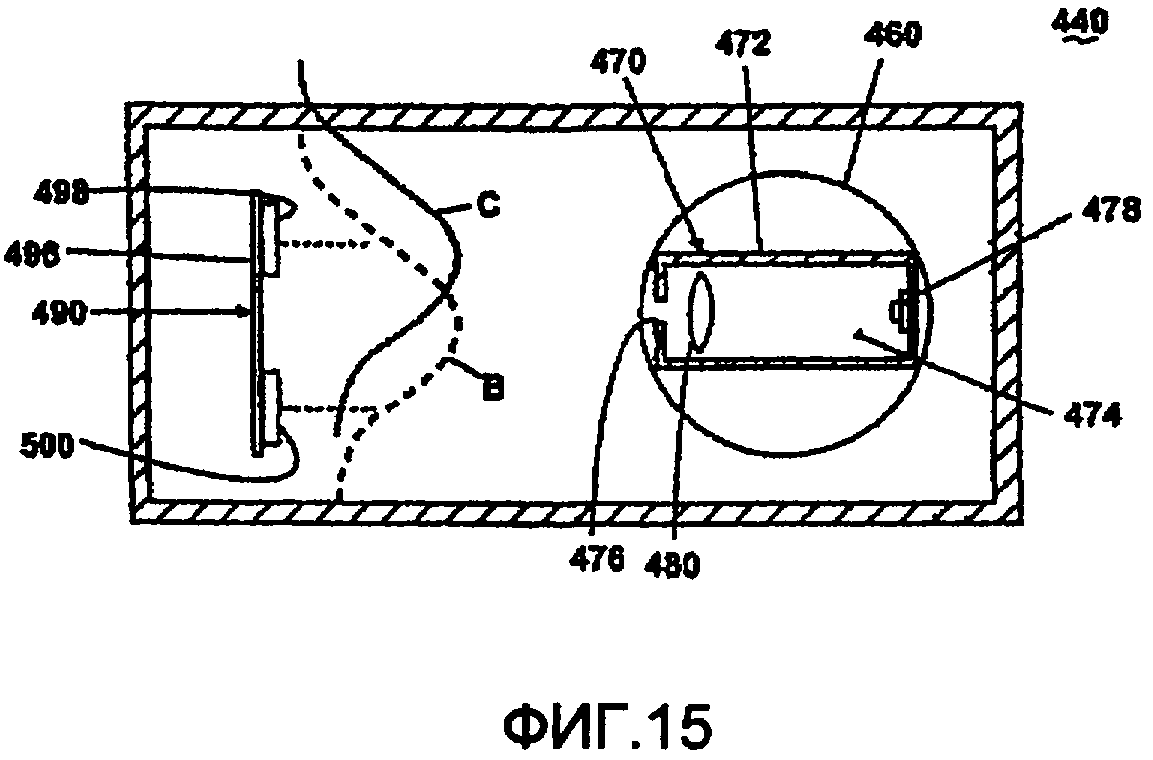
Фиг.15 изображает датчик высоты по второму варианту осуществления в соответствии с настоящим изобретением;
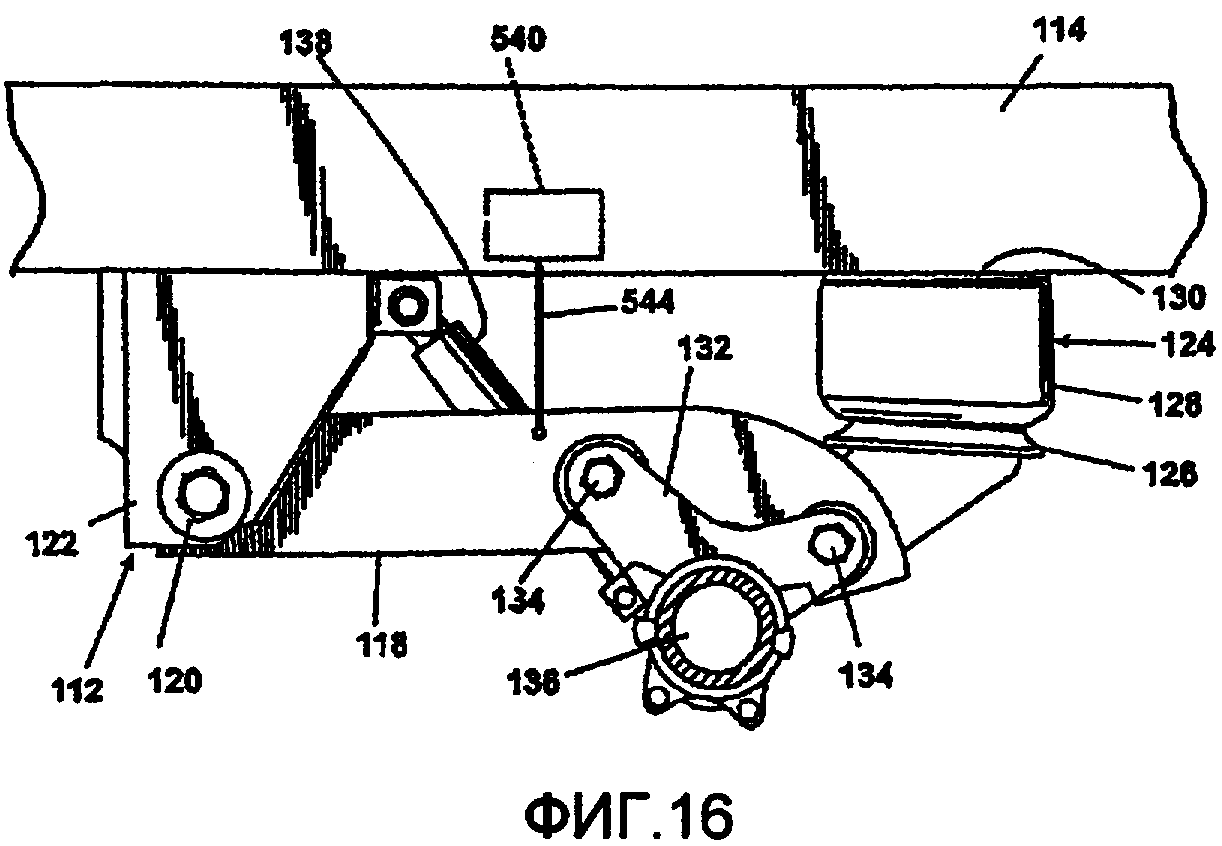
Фиг.16 изображает продольно-рычажную подвеску, включающую датчик высоты по третьему варианту осуществления в соответствии с настоящим изобретением;
Фиг.17 изображает вид в разрезе датчика высоты по третьему варианту осуществления;
Фиг.18 изображает вид в разрезе датчика высоты по четвертому варианту осуществления в соответствии с настоящим изобретением;
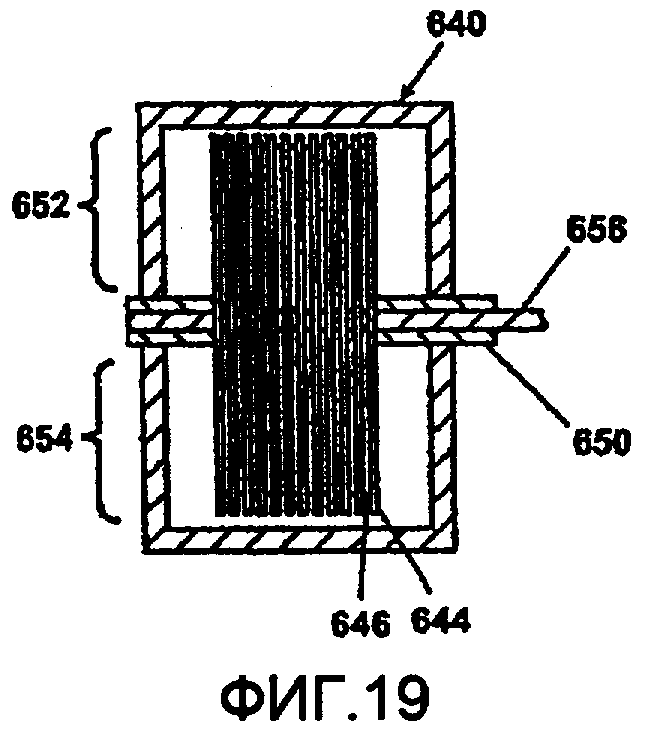
Фиг.19 изображает вид в разрезе по линии 19-19 в соответствии с Фиг.18 для датчика высоты по третьему варианту осуществления;
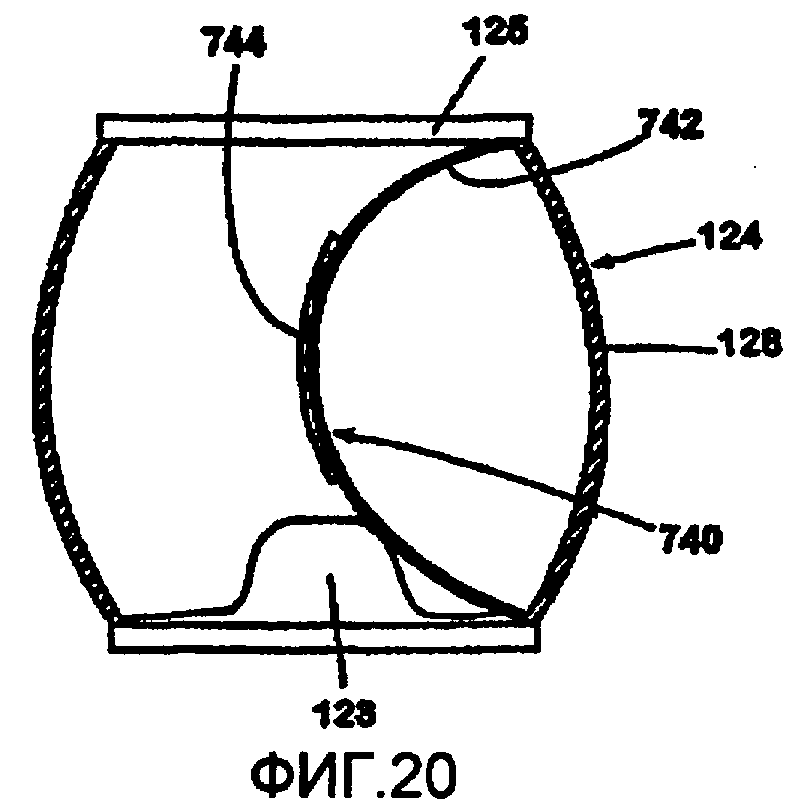
Фиг.20 изображает датчик высоты по пятому варианту осуществления в соответствии с настоящим изобретением;
Фиг.21 изображает датчик высоты по шестому варианту осуществления в соответствии с настоящим изобретением применительно к амортизатору;
Фиг.22 изображает датчик высоты по седьмому варианту осуществления в соответствии с настоящим изобретением и
Фиг.23 изображает вид в разрезе по линии 23-23 в соответствии с Фиг.22.
Подробное описание изобретения
На чертежах во всех показанных видах подобные ссылочные номера обозначают соответствующие элементы конструкции.
На Фиг.2 показана продольно-рычажная подвеска 110 в соответствии с настоящим изобретением. Продольно-рычажная подвеска включает пару (показан только один) узлов продольного рычага 112, прикрепленных к раме 114 транспортного средства и включающих клапан 116 регулирования высоты, оснащенный приводом, в соответствии с настоящим изобретением. Узел продольного рычага 112 включает продольный рычаг 118, имеющий один конец, прикрепленный с возможностью вращения посредством втулки 120 к кронштейну рамы 122, связанному с рамой 114 транспортного средства. Пневматическая рессора 124, включающая в себя поршень 126, прикрепленный к части продольного рычага 118, и пневмоподушку 128, прикрепленную к раме 114 посредством пластины 130, соединяет продольный рычаг 118 с рамой транспортного средства 114. Кронштейн узла 132 оси колеса прикреплен к продольному рычагу между кронштейном рамы 122 и пневматической рессорой 124 с помощью пары втулок 134. Кронштейн узла оси колеса удерживает узел 136 оси колеса, к которому прикреплены с возможностью вращения колеса для сцепления с дорогой (не показанные). Амортизатор 138 проходит между кронштейном узла 132 оси колеса и кронштейном рамы 122.
Хотя принцип работы продольно-рычажной подвески общеизвестен, краткое описание может быть полезно для понимания следующего раскрытия изобретения. Когда колеса (не показанные) транспортного средства сталкиваются с изменениями на поверхности дороги, они прикладывают реактивную силу к продольному рычагу 118, поворачивая продольный рычаг 118 относительно кронштейна 122 рамы и рамы 114 транспортного средства. Вращение продольного рычага 118 демпфируется пневматической рессорой 124.
Помимо демпфирования вращательного движения продольного рычага 118 пневматическая рессора 124 используется также для регулирования высоты рамы 114 относительно земли. Например, в статических условиях, когда воздух подается в пневмоподушку 128, рама 114 транспортного средства поднимается относительно продольного рычага 118, так как продольный рычаг 118 фактически зафиксирован относительно земли вследствие контакта между колесами и дорогой. По аналогии, если сжатый воздух выпускается из пневмоподушки 128, рама 114 транспортного средства будет опускаться по высоте относительно земли.
Устройство 140 предотвращения сползания установлено на раме 114 транспортного средства и предназначено для ограничения вращения продольного рычага 118 во время загрузки, которая ведет к снижению высоту рамы транспортного средства. Это явление известно в данной области техники как сползание трейлера и происходит из-за того, что во время загрузки подача воздуха в пневматические рессоры обычно прекращается. Хотя вес трейлера увеличивается, пневматическая рессора не может быть накачана, для того чтобы противодействовать увеличению веса, что приводит к опусканию рамы. Когда рама опускается, продольный рычаг фактически поворачивается относительно втулки, в результате чего колеса вращаются и вынуждают трейлер сойти с погрузочной площадки.
Устройство 140 предотвращения сползания включает в себя стопорный рычаг 142, который закреплен на раме 114 транспортного средства с возможностью вращения. Стопорный рычаг может поворачиваться от убранного положения (показанного пунктирными линиями) до выдвинутого положения, в котором конец стопорного рычага 142 расположен выше продольного рычага 118 и ограничивает поворот продольного рычага 118 вверх относительно рамы транспортного средства. Перемещение стопорного рычага 142 между убранным и выдвинутым положениями обычно регулируется с помощью пневматического привода (не показанного) путем впуска или выпуска сжатого воздуха из привода. Данный тип устройства 140 предотвращения сползания хорошо известен и не будет описан более подробно.
Датчик контроля высоты 144 прикреплен к кронштейну 122 рамы и соединен с возможностью взаимодействия с продольным рычагом 118 таким образом, что датчик 144 контролирует ориентацию продольного рычага и выдает сигнал, соответствующий данной ориентации. Датчик контроля высоты 144 электрически связан с клапаном 116 регулирования высоты, снабженным приводом, для передачи в клапан 116 регулирования высоты сигнала, показывающего положение продольного рычага.
Как показано на Фиг.2 и 3, датчик 144 жестко прикреплен к внутренней поверхности кронштейна 122 рамы и механически соединен с втулкой 120 через звено 146. Кронштейн 122 рамы имеет расположенные напротив боковые стенки 148, которые соединяются с помощью торцевой стенки 150. Втулка 120 включает в себя наружную втулку 152, которая запрессована в продольном рычаге 118, и внутреннюю втулку 152, которая концентрично расположена в наружной втулке 152. Кольцо из эластомерного материала 155 зажато между наружной втулкой 152 и внутренней втулкой 154. Торцы внутренней втулки 154 упираются во внутренние поверхности боковых стенок 148 соответственно. Крепежный болт 156 прикрепляет с возможностью сжатия боковую стенку 148 к торцам внутренней втулки 154, чтобы зафиксировать внутреннюю втулку относительно кронштейна 122 рамы. При такой конструкции поворот продольного рычага вызывает вращение наружной втулки 152 относительно внутренней втулки 154. Данное вращение осуществляется с помощью эластомерного кольца 155, которое обеспечивает вращение наружной втулки 152 относительно внутренней втулки 154.
Датчик 144 содержит внешнюю ось 160, которая связана со звеном 146, которое соединено с наружной втулкой 152. Звено 146 может иметь любую подходящую форму при условии, что вращательное движение наружной втулки соответственно превращается во вращение внешней оси 160. Например, звено может включать рычаги 162, 164, которые соединяются за счет того, что один из рычагов имеет штифт, который размещается в пазу в конце другого рычага, благодаря чему вращательное движение наружной втулки соответственно передается внешней оси 160 датчика 144, обеспечивая согласованное относительное вертикальное перемещение между рычагами 162, 164.
На Фиг.4 и 5 показан предпочтительный тип датчика 144. Датчик 144 включает в себя излучатель света 170, который закреплен на внешней оси 160. Предпочтительно, если излучатель света 170 образован из цельного блока 172 из металла или пластмассы, имеющего камеру с источником света 174 и световой канал 176, оптически соединяющий световую камеру 174 с внешней поверхностью излучателя света 170. Источник света 178, такой как светоизлучающий диод или лазер, расположен в световой камере 174 и излучает свет, который выходит из блока 172 через световой канал 176 по траектории А.
Датчик высоты 144 включает в себя также узел 190 светочувствительных датчиков, содержащий светонепроницаемый корпус 192, имеющий открытый конец, в котором жестко закреплен рассеивающий элемент 194, такой как матовое стекло. Приемник светового излучения в виде оптического моста 196 расположен в светонепроницаемом корпусе 192 за рассеивающим элементом 194. Оптический мост 196 включает в себя два расположенных на расстоянии друг от друга датчика 198, 200, которыми могут быть резистивные фотоэлементы или детекторы с фотодиодами. Каждый светочувствительный датчик выдает сигнал напряжения, характеризующий интенсивность света, который он воспринимает. Сигналы напряжения и их разности используются для оценки изменения высоты транспортного средства. Предпочтительно, если оптическим мостом 196 является мост для измерения сопротивления (мост Уитстона), использующий резистивные фотоэлементы в конфигурации либо полумоста (из 2-х элементов), либо полного моста (из 4-х элементов).
Работа светочувствительного датчика 144 лучше всего описана со ссылкой на Фиг.4 и 5. Фиг.4 изображает положение излучателя света 170, когда транспортное средство установлено с базовым клиренсом. Следует отметить, что хотя Фиг.4 изображает излучатель света 170, ориентированный по существу перпендикулярно узлу светочувствительных датчиков 190, когда транспортное средство расположено с базовым клиренсом, излучатель света 170 может быть ориентирован под углом относительно узла светочувствительных датчиков 190 для восстановления базового клиренса.
В исходном положении, показанном на Фиг.4, излучатель света 170 излучает луч света вдоль траектории А. Когда луч света контактирует с рассеивающим элементом 194 узла 190 светочувствительных датчиков, лучи рассеянного света контактируют со светочувствительными датчиками 198, расположенными на расстоянии друг от друга. Лучи света проходят расстояние D1 и D2 от рассеивающего элемента 194 до светочувствительных датчиков 198, 200, соответственно. Расстояние, которое проходит свет, влияет на интенсивность света, воспринимаемую светочувствительными датчиками, в результате чего датчики выдают соответствующий выходной сигнал напряжения.
Как показано на Фиг.5, если клиренс транспортного средства изменяется, например, при загрузке или выгрузке товара из транспортного средства, продольный рычаг 118 будет поворачиваться относительно кронштейна 122 рамы, вызывая соответствующее вращение наружной втулки 152, которое приводит к соответствующему вращению внешней оси 160 датчика высоты 144. Когда внешняя ось датчика высоты 160 поворачивается, излучатель света 170 поворачивается в новое положение, и луч света А падает на рассеивающий элемент 194 в другом месте. В этом случае лучи света, выходящие из рассеивающего элемента 194 и попадающие в светочувствительные датчики 198, должны пройти расстояния D3 и D4. Как можно видеть путем сравнения с расстояниями D1 и D2, расстояние D3, пройденное лучом света, входящим в датчик 198, меньше, чем предыдущее расстояние D1. Расстояние D4, напротив, больше, чем расстояние D2, пройденное лучом света, входящим в датчик 200. Изменение положения излучателя света 170 от Фиг.4 до Фиг.5 приводит к тому, что датчик 198 воспринимает свет большей интенсивности, а датчик 200 воспринимает свет меньшей интенсивности. Изменение в интенсивности соответствует изменению в выходном сигнале напряжения светочувствительных датчиков 198, 200. Изменение выходных сигналов датчиков 198, 200 непосредственно связано с поворотом продольного рычага 118 относительно рамы 114 транспортного средства и обеспечивает меру для изменения высоты транспортного средства от заранее установленного положения. Выходные сигналы светочувствительных датчиков 198, 200 могут быть использованы для регулирования впуска и выпуска сжатого воздуха из пневматических рессор для подъема и опускания рамы транспортного средства до тех пор, пока излучатель света 170 не повернется назад в исходное положение.
Фиг.6 изображает компоненты клапана 116 регулирования высоты, снабженного приводом, в соответствии с настоящим изобретением. Клапан 116 регулирования высоты, снабженный приводом, включает в себя корпус, состоящий из двух частей, имеющий основание 202 и крышку 204, которая показана удаленной от основания 202. Основание 202 функционально разделено на два участка: участок электрического соединения 206 и участок управления текучей средой 208. Участок электрического соединения 206 включает в себя интерфейс 210 ввода-вывода, который имеет необходимые электрические соединения для соединения датчика регулирования высоты 144 и любых других датчиков. Участок управления текучей средой 208 включает в себя узел клапана 212 и коллектор текучей среды 214, имеющий впускное отверстие 216 и рабочее отверстие 218. Выпускное отверстие 220 расположено на противоположной стороне основания 202 по отношению к впускному отверстию 216 и рабочему отверстию 218. Узел клапана 212 управляет потоком текучей среды, проходящим в рабочее отверстие и из рабочего отверстия 218 либо из впускного отверстия 216, либо в выпускное отверстие 220, чтобы таким образом управлять впуском сжатого воздуха в пневматическую рессору и выпуском сжатого воздуха из пневматической рессоры 124.
Привод 222 клапана соединен с возможностью управления с узлом 212 клапана. Привод 222 клапана содержит двигатель 224, имеющий выходную ось 226, на которой установлен приводной механизм 228. Раздаточный механизм 230 соединен с приводным механизмом 228 и имеет ось 232 управления, которая соединена с узлом клапана, посредством чего приведение в действие двигателя 224 вращает приводной механизм 228, который через раздаточный механизм обеспечивает соединение с возможностью прохождения текучей среды между рабочим отверстием 218 и либо впускным отверстием 216, либо выпускным отверстием 220.
В клапане 116 регулирования высоты, оснащенном приводом, установлено также устройство 240 управления. Устройство 240 управления может быть образовано с помощью монтажной платы 242, на которой установлены двигатель 224 и раздаточный механизм 230. Микропроцессор 244 размещается на монтажной плате 242 и электрически связан с интерфейсом 210 ввода-вывода и двигателем 224. Датчик положения клапана 246 также установлен на монтажной плате 242 и электрически связан с процессором 244. Датчик положения клапана 246 включает в себя привод 248, расположенный на узле клапана 212.
На Фиг.7 и 8 основание 202 показано с удаленным узлом 212 клапана. Основание 202 включает внутреннюю камеру 260, открытую с одной стороны для размещения узла клапана. Внутренняя камера 260 частично образована с помощью внутренней боковой стенки 262 корпуса и внутренней периферийной стенки 264, которая отходит от боковой стенки 262. Канал 266 подачи воздуха и канал 268 пневматической рессоры проходят из камеры 260 к впускному отверстию 216 и рабочему отверстию 218, соответственно. Канал подачи воздуха образует щелевое отверстие 266А в периферийной стенке 264. Канал пневматической пружины образует отверстие 268А в стенке 262. Выпускной канал 270 проходит с наружной стороны основания к выпускному отверстию 220.
Канал 266 подачи воздуха приспособлен для соединения источника сжатого воздуха с внутренней камерой 260 с возможностью прохождения текучей среды. Канал пневматической пружины 268 соединяет внутреннюю камеру 260 с воздушной оболочкой 128 с возможностью прохождения текучей среды. Выпускной канал 270 соединяет камеру 260 с атмосферой с возможностью прохождения текучей среды.
Как показано на Фиг.9 и 10, узел 212 клапана включает в себя сдвижной клапан, включающий статический сдвижной диск 272 и динамический диск 273. Статический диск 272 имеет осевой канал в виде отверстия 274 и канал для прохождения текучей среды в виде отверстия 276, которые оба проходят через диск 272. Статический сдвижной диск 272 включает невидимые выравнивающие отверстия 278 и 280, в которых размещаются установочные штифты 282 и 284, проходящие из основания 202 во внутреннюю камеру 260 для выравнивания статического сдвижного диска 272 относительно основания 202 таким образом, чтобы отверстие 276 было центрировано с отверстием 268А канала пневматической рессоры 268. Осевое отверстие 274 центрируется с выпускным каналом 270. Таким образом, отверстие 276 и осевое отверстие 274 обеспечивают соединение с возможностью прохождения текучей среды между верхней поверхностью статического диска 272 и рабочим отверстием 218 и выпускным отверстием 220.
На Фиг.10 динамический сдвижной диск 273 показан на его нижней поверхности. Динамический сдвижной диск 273 расположен во внутренней камере 260 основания 202 таким образом, что нижняя поверхность динамического сдвижного диска находится в состоянии поджима с верхней поверхностью статического сдвижного диска 270. Динамический сдвижной диск 273 включает сектор 282, от которого отходит округлый выступ 284. Канал в виде обычной Т-образной выемки 286 образован в динамическом сдвижном диске 273 и включает в себя дугообразную часть 288 и канал 290. Дугообразная часть 288 преимущественно расположена в секторе 282 и включает расположенные напротив выпускные профилированные пазы 294. Впускной профилированный паз 296 расположен на наружной стороне сектора 282 и соответствует одному из выпускных профилированных пазов 294. Глухой паз 298 образован в верхней поверхности динамического сдвижного диска 273 и имеет размеры для размещения конца оси управления 232.
При сборке отверстие 276 сдвижного диска 272 будет находиться между одной из пар выпускных профилированных пазов 294 и впускных профилированных пазов 296. Глухой паз 298 принимает нижний конец оси управления 232. Канал 290 соединяет с возможностью прохождения текучей среды дугообразную часть 288 и выпускные профилированные пазы с выпускным отверстием 220 через выпускной канал 270.
На Фиг.11-13 показаны три основных рабочих положения сдвижного клапана: положение нагнетания, нейтральное положение и положение выпуска. Применительно к данному описанию будет сделано допущение в том, что клапан регулирования высоты начинает работать в нейтральном положении. В нейтральном положении, показанном на Фиг.11, динамический сдвижной диск 273 ориентирован относительно сдвижного диска 272 таким образом, что отверстие 276 сдвижного диска расположено между внутренним пазом 294 и наружным пазом 296 и в состоянии поджима с динамическим сдвижным диском 273, эффективно уплотняя отверстие 268А канала 268 пневматической рессоры и блокируя прохождение текучей среды либо из отверстия 266 подачи воздуха, либо из выпускного канала 270 в канал 268 пневматической рессоры.
Если по какой-либо причине происходит относительное перемещение продольного рычага 118 в направлении рамы 114 транспортного средства, например, при загрузке трейлера, клапан 116 перемещается в положение нагнетания, как показано на Фиг.12, для впуска воздуха в пневмоподушку 128 для подъема рамы 114 транспортного средства относительно продольного рычага 118. Как показано на Фиг.12, при таких условиях двигатель 224 поворачивает динамический сдвижной диск 273 таким образом, что отверстие 276 соединяется с возможностью прохождения текучей среды с наружным пазом 296 для открытия канала пневматической рессоры 268 во внутреннюю камеру 260. Так как внутренняя камера 260 постоянно открыта для подачи воздуха через отверстие 266 подачи воздуха, сжатый воздух будет направляться в канал 268 пневматической рессоры, и сжатый воздух будет впускаться в пневматические рессоры 124.
Если продольный рычаг 118 и рама 114 транспортного средства смещаются, отдаляясь друг от друга, например, при выгрузке товаров из трейлера, воздух должен выпускаться из воздушных оболочек 128, для того чтобы возвратить раму 114 транспортного средства на базовую высоту. Как показано на Фиг.13, при таких условиях клапан перемещается в положение выпуска с помощью двигателя 224, перемещающего динамический сдвижной диск 273 относительно сдвижного диска 272 таким образом, что внутренний паз 294 входит в соединение с возможностью прохождения текучей среды с отверстием 276. В положении выпуска канал 268 пневматической рессоры соединяется с возможностью прохождения текучей среды с выпускным каналом 270 через канал 290.
Фиг.14 является схематичной иллюстрацией устройства управления высотой для подвески 110 и показывает соединения между основным устройством 300 управления транспортным средством 300, устройством управления подвеской 240, датчиком высоты 144 и узлом 212 клапана. Данная схема включает также датчик 302 для измерения положения рычагов 142 устройства предотвращения сползания. Воздушный резервуар 304 подает сжатый воздух в пневматическую систему подвески и пневматическую систему тормозов.
Основное устройство 300 управления транспортным средством управляет многими эксплуатационными характеристиками транспортного средства. Устройство управления может включать, например, любое микропроцессорное устройство, программируемое или конфигурируемое логическое устройство (устройства), включая, например, конфигурируемые вентильные матрицы и подобные устройства, подходящие для обработки выходных сигналов датчиков и генерирования сигнала управления для приведения в действие клапана. В предпочтительном варианте осуществления основное устройство 300 управления транспортным средством включает микропроцессор.
Основное устройство 300 управления транспортным средством обычно соединено с множеством отдельных устройств управления, каждое из которых может включать микропроцессор или программируемое или конфигурируемое логическое устройство (устройства), как описано выше. Множество отдельных устройств управления управляют конкретными эксплуатационными характеристиками, как, например, устройство 240 управления подвеской. Основное устройство 300 управления включает в себя канал 310 питания, который подает энергию в устройство 240 управления подвеской. Каналы 312, 314 для передачи данных обеспечивают, соответственно, передачу данных (выходной) в устройство управления подвеской и получение данных (входной) из устройства 240 управления подвеской. Предпочтительно, если выходной канал 312 передает информационный сигнал выбранной пользователем функции/режима из основного устройства 300 управления в устройство 240 управления подвеской, и который используется устройством 240 управления подвеской для определения своего режима работы. Предпочтительно, если входной канал 314 обеспечивает основное устройство 300 управления данными высоты, данными режима и/или пневматическими данными из устройства 240 управления подвеской.
Кроме того, основное устройство 300 управления предусматривает получение множества входных сигналов из разных источников, включая ввод через канал для передачи данных 307 дистанционно вводимой заданной высоты расположения кузова 303, которая может быть установлена, например, пользователем или может быть связана с режимом работы. Кроме того, предполагается, что основное устройство 300 управления может получать сигнал сброса подачи текучей среды, который в одном варианте осуществления может передаваться через канал 314 для передачи данных. Кроме того, основное устройство 300 управления может получать через канал 305 для передачи данных входной сигнал из устройства 301 управления тормозной системой. Устройство 301 управления тормозной системой может обеспечить сигнал системы автоматического торможения (Automatic Braking System - ABS) и/или сигнал тормозной системы с электронным управлением (Electronic Braking System - EBS). Основное устройство 300 управления может затем обрабатывать все входные данные, обеспечивающие усовершенствование управления устройством подвески транспортного средства.
Датчик 144 высоты включает в себя канал 316 питания, который обеспечивает подачу электроэнергии из устройства 240 управления подвеской в датчик 144 высоты. Канал 318 для передачи данных обеспечивает подачу в устройство 240 управления подвеской входного сигнала, который показывает высоту транспортного средства в данный момент.
Узел 212 клапана включает в себя канал 320 питания, который обеспечивает подачу энергии из устройства 240 управления подвеской в узел 212 клапана. Канал 322 для передачи данных обеспечивает подачу в устройство 240 управления подвеской входного сигнала, который показывает положение динамического диска относительно стационарного диска. Приводной канал 323 обеспечивает подачу информационного сигнала из устройства 240 управления подвеской в узел 212 клапана для управления работой двигателя 224. Как было описано выше, впускное отверстие 216 клапана 116 регулирования высоты соединено с возможностью прохождения текучей среды с резервуаром 304 со сжатым воздухом для транспортного средства. Аналогичным образом рабочее отверстие 218 соединено с возможностью прохождения текучей среды с пневматической рессорой 124. Выпускное отверстие 220 соединено с возможностью прохождения текучей среды с атмосферой.
Канал 324 питания обеспечивает подачу энергии из устройства 240 управления подвеской в датчик 302. Как и в случае других датчиков, канал 326 для передачи данных обеспечивает устройство 240 управления подвеской входным сигналом, показывающим положение рычага 142. Для измерения положения рычага 142 пригодны и в настоящее время используются многие подходящие датчики. Учитывая, что рычаг 142 приводится в движение с помощью выпуска сжатого воздуха из пневматических стояночных тормозов, обычный датчик представляет собой реле давления, которое выдает электрический сигнал, когда воздух выпускается из стояночных тормозов.
Устройство 240 управления подвеской включает запоминающее устройство, предпочтительно энергонезависимое запоминающее устройство, которое содержит необходимую логику для управления подвеской транспортного средства, особенно управления высотой транспортного средства. Устройство 240 управления включает также алгоритм фильтрации, который используется для обработки данных, полученных от датчика 144 высоты, для устранения частых изменений, которые обычно показывают временные изменения высоты, и тем самым предотвращения регулирование высоты транспортного средства без необходимости. Компенсационные швы на поверхности дороги и другие повторяющиеся или неповторяющиеся отклонения являются примерами частых изменений в высоте транспортного средства, которые не требуют изменения высоты расположения кузова транспортного средства.
Необходимость предотвращения необязательного регулирования высоты транспортного средства является важной для эксплуатации транспортного средства. Правительственные регламентирующие документы требуют, чтобы воздухопровод тормозной системы был отделен от всех других воздухопроводов, включая воздухопровод системы подвески. На большинстве транспортных средств существует только два воздухопровода или две пневматические системы: пневматическая система тормозов и пневматическая система подвески, которая также обеспечивает подачу воздуха в любые пневматические устройства. Большинство пневматических систем получают сжатый воздух для обеих систем из одного и того же воздушного резервуара 304 путем использования клапана (пневматического предохранительного клапана), который подает воздух только в воздуховод тормозной системы, когда давление в данном воздушном резервуаре падает ниже заранее установленного уровня. Если высота транспортного средства регулируется без необходимости, например, реагируя на временные изменения высоты, можно забирать сжатый воздух из воздушного резервуара 304 со скоростью, превышающей возможности бортового компрессора, пополняющего запас воздуха в данном воздушном резервуаре, что приводит к преждевременному и ненужному отключению устройства регулирования высоты до тех пор, пока давление воздуха не поднимется до уровня, превышающего пороговое значение.
При эксплуатации транспортного средства пользователь сначала выбирает рабочий режим подвески, который затем передается в устройство 240 управления подвеской. Выбор режима может включать заранее установленную высоту расположения кузова транспортного средства. В качестве альтернативы предпочтительная высота расположения кузова и входной сигнал с помощью пользователя могут быть установлены равными высоте подвески в данный момент. После того как установлен начальный рабочий режим и высота расположения кузова транспортного средства, управление подвеской 110 передается устройству 240 управления подвеской. Однако следует отметить, что данное устройство предусматривает дистанционное заданное значение 303, когда при необходимости пользователь может, например, вручную устанавливать заданное значение.
Хотя устройство 240 управления подвеской может управлять многими операциями, относящимися к подвеске, применительно к устройству регулирования высоты в соответствии с настоящим изобретением самой существенной операцией, осуществляемой с помощью устройства 240 управления подвеской, является управление клиренсом транспортного средства в ответ на данные клиренса, получаемые от датчика 144 высоты, и соответствующее регулирование клиренса транспортного средства путем регулирования объема воздуха в пневмоподушках 128 пневматических рессор 124. Предпочтительно, если устройство 240 управления подвеской получает поток данных высоты расположения кузова от датчика 144 высоты через канал 318 для передачи данных. Поток данных высоты кузова анализируется с помощью устройства 240 управления подвеской для отслеживания как высокочастотных, так и низкочастотных изменений в высоте расположения кузова. Предпочтительно, если устройство 240 управления подвеской для обработки потока данных высоты кузова использует фильтр для удаления результатов обработки, относящихся к высокочастотным изменениям в высоте кузова транспортного средства, которые обычно вносятся явлениями, которые не являются основанием для изменения клиренса в данный момент.
После фильтрации данные о клиренсе контролируются и сравниваются с базовой величиной клиренса транспортного средства. Если изменение клиренса в данный момент превышает базовую величину на заранее установленную величину «дельта» (пороговое значение), устройство 240 управления подвеской регулирует клиренс транспортного средства в данный момент, соответственно, впуская или выпуская сжатый воздух из пневматической рессоры 124. Обычно клиренс в данный момент контролируется на протяжении заранее установленного порогового периода «времени выборки», чтобы гарантировать, что изменение в данный момент относительно базового клиренса не является кратковременным. Если клиренс превышает величину дельта за время выборки, это обычно является показателем того, что существует постоянное изменение клиренса транспортного средства и что его в данный момент нужно регулировать до базовой величины. Не стоит упоминать, что абсолютная величина дельта обычно одинакова независимо от того, будет ли клиренс в данный момент выше или ниже базовой величины. Однако в соответствии с формулой данного изобретения величина дельта имеет разные значения в зависимости от того, будет ли клиренс в данный момент выше или ниже базовой величины. Следует также отметить, что величина дельта обычно определяется пользователем и может варьироваться в зависимости от транспортного средства, подвески, дорожных условий или других факторов.
Если клиренс в данный момент выше базового значения на величину, превышающую пороговое значение дельта за время выборки, то клиренс в данный момент является слишком высоким и должен быть снижен до базового значения. Для перемещения подвески до базового значения клиренса устройство 240 управления подвеской передает сигнал управления через канал 323 в узел 212 клапана, чтобы запустить двигатель 224 и тем самым обеспечить поворот динамического диска 273 для перемещения клапана в положение выпуска, в котором рабочее отверстие 216 соединено с возможностью прохождения текучей среды с выпускным отверстием 212 для выпуска воздуха из пневмоподушек 128 и снижения высоты подвески в данный момент до контрольной высоты. Устройство 240 управления подвеской продолжает получать данные высоты от датчика 144 высоты, при этом воздух выпускается из пневмоподушки 128 через узел 212 клапана. Когда устройство 240 управления подвеской определяет из данных высоты, что высота подвески в данный момент по существу равна контрольной высоте, устройство 240 управления подвеской передает сигнал управления в двигатель 224 для перемещения динамического сдвижного диска 273 назад в нейтральное положение для прекращения выпуска воздуха из пневмоподушки 128.
Если клиренс в данный момент ниже базового значения на величину, превышающую дельта за время выборки, то клиренс в данный момент является слишком низким и должен быть увеличен до базовой величины. Для перемещения подвески до контрольной высоты устройство 240 управления подвеской передает сигнал управления по каналу 323 в узел 212 клапана, чтобы запустить двигатель 224 и тем самым обеспечить поворот динамического диска 273 для перемещения клапана в положение нагнетания, в котором рабочее отверстие 218 соединено с возможностью прохождения текучей среды с впускным отверстием 216 для впуска воздуха в пневмоподушки 128 и увеличения клиренса в данный момент до базовой величины. Устройство 240 управления подвеской продолжает получать данные высоты от датчика 144 высоты, при этом воздух впускается в пневмоподушку 128 через узел клапана 212. Когда устройство 240 управления подвеской определяет из данных высоты, что клиренс в данный момент по существу равен базовой величине, устройство 240 управления подвеской передает сигнал управления в двигатель 224 для перемещения динамического сдвижного диска 273 назад в нейтральное положение для прекращения впуска воздуха в пневмоподушку 128.
Предпочтительно, если устройство управления подвеской 240 посредством своей программной логики контролирует скорость изменения клиренса, когда он приближается к базовой величине, чтобы предотвратить перерегулирование, которое в случае, если оно достаточно велико, может потребовать дополнительного регулирования клиренса транспортного средства в обратном направлении. В самом худшем сценарии это может привести к эффекту неустойчивого состояния, в котором клиренс непрерывно изменяется то выше, то ниже базового значения, что, скорее всего, приведет к падению давления воздуха в воздушном резервуаре 304 ниже пороговой величины.
Хотя существует много способов, с помощью которых устройство 240 управления подвеской может передавать сигнал управления в узел 212 клапана для приведения в действие двигателя 224 для управления положением динамического диска 273 и тем самым управления впуском и выпуском сжатого воздуха из пневмоподушки 128, предпочтительно, чтобы устройство управления подвеской 240 и сигнал управления имели либо положительное, либо отрицательное напряжение. Знак сигнала напряжения может, например, управлять, соответственно, прямым и обратным ходом двигателя 224 (электродвигателя). В сочетании с положительным или отрицательным сигналом напряжения устройство 240 управления подвеской получает поток данных по каналу 322 независимо от положения динамического сдвижного диска 273. Информация о положении используется для определения положения динамического сдвижного диска 273 и обеспечения устройства 240 управления подвеской информацией, необходимой для определения соответствующего знака сигнала напряжения, необходимого для перемещения динамического сдвижного диска 273 в требуемое положение для перемещения клапана в положение нагнетания, нейтральное положение или положение выпуска.
Фиг.15 изображает датчик 440 высоты по второму варианту осуществления для использования с настоящим изобретением. Датчик 440 высоты во многом подобен датчику высоты по первому варианту осуществления, поэтому подобные номера будут использованы для обозначения аналогичных элементов, и только основные отличия между первым и вторым вариантами осуществления будут рассмотрены подробно. Датчик 440 высоты включает в себя излучатель 470 света, который закреплен на внешней оси 160 и излучает дифракционный оптический сигнал на светочувствительный датчик 490. Излучатель света 470 включает в себя блок 472, имеющий световую камеру 474 и дифракционную щель 476, оптически соединяющую световую камеру 474 с наружной частью блока 472. Излучатель света, такой как светоизлучающий диод или диодный лазер, расположен в световой камере 474. Коллимирующая линза расположена между источником света 478 и дифракционной щелью 476.
Узел 490 светочувствительных датчиков включает в себя оптический мост 496, имеющий расположенные на расстоянии друг от друга светочувствительные датчики 498, 500. Оптический мост 490 не размещается в корпусе как в первом варианте осуществления. Отсутствует также и рассеивающий элемент между оптическим мостом 496 и излучателем 470 света.
Излучатель 470 света излучает дифракционную картинку, как показано пунктирной линией В. Пунктирная линия В показывает интенсивность света относительно светочувствительных датчиков 498, 500. Как можно видеть, в исходном положении, как показано на Фиг.7, максимальная интенсивность дифракционной картинки по существу наблюдается посредине между светоизлучающими датчиками 498, 500. Предпочтительно, если светочувствительные датчики 498, 500 расположены таким образом, чтобы они воспринимали часть дифракционной картинки, которая соответствует примерно 50% максимальной интенсивности. Когда выходная ось 460 поворачивается в ответ на изменение высоты транспортного средства, дифракционная картинка смещается в сторону относительно оптического моста 496, как показано, с помощью дифракционной картинки С. Смещение дифракционной картинки изменяет интенсивность света, воспринимаемого датчиками 498, 500. Оптический мост 496 выдает сигнал напряжения, который соответствует интенсивности, которая в данный момент воспринимается оптическими датчиками 498, 500. Выходной сигнал обрабатывается точно так же, как выходной сигнал для первого варианта осуществления, как было описано ранее.
Для второго варианта осуществления предпочтительно, если излучателем света является или узкополосный инфракрасный светодиод с высокой мощностью выходного излучения (с длиной волны примерно 940 нм), или инфракрасный диодный лазер. Предпочтительно, если свет от излучателя света соответствует или оптимизирован с чувствительностью светочувствительных датчиков 498, 500, которые могут включать, например, резистивные фотоэлементы, инфракрасные фотодиоды или инфракрасные фотогальванические элементы.
В данном изобретении важно также, чтобы свет, излучаемый излучателем 470 света, был коллимированным и затем излучался через щель для получения дифракционной картинки. Поэтому форма щели должна контролироваться с высокой точностью для получения дифракционной картинки. Например, если излучатель света излучает длину волны 940 нм, тогда щель должна иметь размер порядка от 0,00005 м до 0,0001 м. Свет, выходящий из щели 476, должен пройти расстояние, которое является относительно большим по сравнению с размером щели, до контактирования с оптическим мостом. Например, в вышеприведенном примере достаточным будет расстояние 5 см.
Фиг.16 и 17 иллюстрируют датчик 540 высоты по третьему варианту осуществления в условиях продольно-рычажной подвески и транспортного средства, показанных на Фиг.1. Датчик 540 по третьему варианту осуществления по существу аналогичен первому варианту осуществления за исключением того, что датчик 540 высоты контролирует изменение высоты продольного рычага 118, а не поворот продольного рычага 118 для оценки отклонения высоты рамы транспортного средства от базового положения. Поэтому аналогичные элементы в третьем варианте осуществления по сравнению с первым и вторым вариантами осуществления будут обозначены сходными номерами. Например, датчик 540 высоты может использовать также излучатель 170 света и узел 190 светочувствительных датчиков, как раскрыто в первом варианте осуществления.
Основным отличием между датчиком 540 высоты и датчиком 440 высоты является то, что излучатель 570 света закреплен, и перемещающаяся в поперечном направлении линза Френеля 542 расположена между излучателем 570 света и узлом 190 светочувствительных датчиков. Линза Френеля 542 механически соединена с продольным рычагом 118 с помощью звена 544. Когда продольный рычаг поворачивается относительно кронштейна 122 рамы, звено 544 совершает возвратно-поступательное перемещение относительно датчика 540 высоты и перемещает линзу Френеля 542 относительно закрепленного положения излучателя 170 света и узла 190 светочувствительных датчиков.
Как хорошо известно, линза Френеля 542 включает ряд концентрических колец 548, при этом каждое кольцо имеет лицевую или отражающую поверхность, которая ориентирована под разным углом так, чтобы свет, падающий на плоскую поверхность 546 линзы Френеля, проходил через линзу и фокусировался с помощью концентрических колец в заранее установленной фокальной точке.
В датчике 540 высоты плоская поверхность 546 линзы Френеля 542 обращена к излучателю 170 света, а концентрические кольца 548 обращены к рассеивающему элементу 194 узла светочувствительных датчиков 190. Поэтому свет, излучаемый излучателем 170 света и падающий на плоскую поверхность 546 линзы Френеля, фокусируется с помощью концентрических колец в точке на рассеивающем элементе 194. Угловая ориентация преломляющих поверхностей, образованных концентрическими канавками, выбирается таким образом, чтобы свет, излучаемый излучателем света, фокусировался на участке рассеивающего элемента 194.
Когда продольный рычаг 118 перемещается относительно транспортного средства, линза Френеля 542 смещается в сторону относительно рассеивающего элемента, изменяя расположение фокальной точки на рассеивающем элементе и тем самым изменяя интенсивность света, воспринимаемого светочувствительными датчиками 398, 400. Точка, в которой свет контактирует с рассеивающим элементом 194 после прохождения через линзу Френеля 542, обрабатывается по существу так же, как описано для первого варианта осуществления.
Фиг.18 и 19 изображают датчик 640 высоты по четвертому варианту осуществления в соответствии с настоящим изобретением. Датчик 640 высоты по четвертому варианту осуществления подобен первому и третьему вариантам осуществления в том отношении, что он реагирует на вращение продольного рычага 118 относительно рамы 114 транспортного средства. Датчик 640 высоты отличается тем, что он использует изменение емкости для генерирования сигнала управления для определения изменения высоты рамы транспортного средства относительно продольного рычага 118.
Датчик 640 высоты имеет конденсатор переменной емкости, включающий ряд расположенных на расстоянии друг от друга неподвижных пластин 644, между которыми размещается ряд подвижных пластин 646, которые образуют схему конденсаторного моста 642. Неподвижные пластины 644 образованы парой расположенных напротив полукругов 648, при этом каждый полукруг крепится к опорной трубке 650. Полукруглые пластины 648 прикреплены к опорной трубке 650 таким образом, что они расположены на небольшом расстоянии друг от друга, чтобы эффективно разделить неподвижные пластины 644 на первый и второй комплекты 652, 654, соответственно. Первый и второй комплекты 652, 654 электрически разделены. Подвижные пластины 646 имеют форму сектора или клина и закреплены на вращающейся оси управления 656, которая закреплена в опорной трубке 650 и соединена с внешней осью 160 таким образом, чтобы вращение оси приводило к вращению подвижных пластин 646 относительно неподвижных пластин 644.
В предпочтительном исходном положении подвижные пластины 646 расположены относительно первого и второго комплектов 652, 654 неподвижных пластин 644 таким образом, что зазор между первым и вторым комплектами 652, 654 находится примерно посредине относительно подвижной пластины. Предпочтительно, если пространство между неподвижными и подвижными пластинами заполнено подходящим диэлектрическим материалом.
При эксплуатации, когда продольный рычаг 118 поворачивается относительно рамы 114 транспортного средства в ответ на изменение высоты транспортного средства, внешняя ось 160 вращает ось управления 656 соответственно, которая перемещает подвижные пластины 646 относительно первого и второго комплектов 652, 654 полукруглых пластин. Когда подвижные пластины закрывают большую площадь на одном комплекте полукруглых пластин, емкость на данном комплекте полукруглых пластин увеличивается, в результате чего возникает разность емкостей между первым и вторым комплектами пластин. Разность емкостей связана с величиной изменения высоты и выдается датчиком высоты для использования в регулировании высоты транспортного средства.
Фиг.20 изображает датчик 740 высоты по пятому варианту осуществления в соответствии с настоящим изобретением. В отличие от первых четырех вариантов осуществления датчик 740 высоты непосредственно не связан с продольным рычагом 118. Вместо этого датчик 740 высоты расположен во внутренней части пневматической рессоры 124. Датчик 740 высоты включает плоскую пружину 742, имеющую один конец, соединенный с верхним листом 125 пневматической рессоры 124, и другой конец, соединенный с поршнем 123 пневматической рессоры 124. Гибкий переменный резистор 744 закреплен на плоской пружине 742. Гибкий переменный резистор хорошо известен и подробно описан в патенте США №5,086,785, который включен согласно ссылке. Гибкий резистор 744 изменяет свое сопротивление при его изгибании.
Характерная особенность гибкого резистора 744, изменяющего свое сопротивление в ответ на его изгибание, используется для указания степени изменения высоты транспортного средства относительно контрольного положения. Например, когда высота транспортного средства изменяется в ответ на загрузку или разгрузку транспортного средства, воздушная оболочка 128 будет соответственно сжиматься или расширяться, что приводит к сгибанию плоской пружины 742 и гибкого переменного резистора 744. Изменение сопротивления гибкого переменного резистора 744 в данном случае становится индикатором степени изменения высоты.
Для стабильности измерений важно, чтобы гибкий переменный резистор 744 одинаково сгибался многократно. Плоская пружина 742 образует основание для гибкого переменного резистора 744 и облегчает многократное одинаковое сгибание гибкого переменного резистора 744.
Фиг.21 изображает датчик 840 высоты по шестому варианту осуществления в соответствии с настоящим изобретением. Датчик высоты 840 подобен датчику 740 в том, что он использует гибкий переменный резистор 744, который обмотан вокруг витков винтовой или спиральной пружины 842. Спиральная пружина 842 расположена во внутренней части амортизатора 138.
Амортизатор включает наружный кожух 844, который прикреплен с возможностью перемещения к цилиндру 846 и покрывает цилиндр 846, от которого отходит вал поршня 848, который также проходит через кожух 844. Спиральная пружина 842 обвивает вал поршня 848 и имеет один конец, прикрепленный к кожуху 844, и другой конец, прикрепленный к верхней части цилиндра 846.
Датчик 840 высоты работает по существу так же, как датчик 740 высоты, в том плане, что когда продольный рычаг 118 поворачивается относительно рамы 114 транспортного средства, кожух амортизатора 844 совершает возвратно-поступательное движение относительно корпуса 846 для сжатия или расширения спиральной пружины 842, которая сгибает гибкий переменный резистор 744. Как и в случае датчика высоты 740, сгибание гибкого переменного резистора 744 датчика высоты 840 приводит к тому, что датчик высоты 840 выдает сигнал, который соответствует относительному перемещению рамы 114 транспортного средства и продольного рычага 118.
Фиг.22 и 23 изображают датчик высоты по седьмому варианту осуществления 940 в соответствии с настоящим изобретением, а также применительно к амортизатору 138. Различие между датчиком 940 высоты по седьмому варианту осуществления и датчиком 840 высоты по шестому варианту осуществления заключается в том, что вместо спиральной пружины 842 используется плоская пружина 942. Плоская пружина 942 удерживается в отдельной камере 645, образованной в кожухе 844 амортизатора.
Как и в случае датчика высоты 740, плоская пружина 942 датчика высоты может иметь различные изначально изогнутые формы. Например, плоская пружина, описанная в датчике 740 высоты, имеет преимущественно С-образный профиль, тогда как плоская пружина 942 имеет профиль полупериода синусоидальной волны или, другими словами, червеобразную форму. Данный профиль может также быть S-образной формы, ориентированной либо по вертикали, либо по горизонтали, или в виде нескольких синусоидальных волн.
Хотя настоящее изобретение описано со ссылкой на конкретную схему размещения деталей, элементов и т.п., они не исчерпывают всех возможных схем или элементов, и в действительности специалисты в данной области могут обнаружить много других модификаций или изменений.
Реферат
Группа изобретений относится к технике реализации регулирования высоты пневматических подвесок транспортного средства. Система содержит устройство управления, которое получает и обрабатывает множество переменных входных данных для обеспечения усовершенствованного управления высотой расположения кузова. Входные данные охватывают сигнал тормозной системы, включающий сигнал системы автоматического торможения (ABS) и/или сигнал тормозной системы с электронным управлением (EBS), сигнал дистанционного задания значения клиренса, и/или сигнал сброса подачи текучей среды. Устройство обеспечивает также измерение текущего клиренса транспортного средства, фильтрацию результатов измерения, определение превышения отфильтрованным сигналом порогового уровня и соответствующее регулирование клиренса. Группа изобретений обеспечивает качественное управление пневматической подвеской транспортного средства. 2 н. и 13 з.п. ф-лы, 23 ил.
Формула
датчик, который измеряет расстояние между мостом транспортного средства и рамой транспортного средства и генерирует сигнал датчика, характеризующий его;
клапан, имеющий впускное отверстие, связанное с источником сжатой текучей среды, рабочее отверстие, связанное с подушкой для текучей среды, расположенной между мостом транспортного средства и рамой транспортного средства, и выпускное отверстие, соединенное с атмосферой;
двигатель, соединенный с указанным клапаном для селективного приведения в действие клапана между положением нагнетания, в котором впускное отверстие связано с возможностью прохождения текучей среды с рабочим отверстием, положением выпуска, в котором рабочее отверстие связано с возможностью прохождения текучей среды с выпускным отверстием, и нейтральным положением, в котором соответствующие отверстия изолированы друг от друга с невозможностью прохождения текучей среды;
устройство управления, связанное с указанным датчиком для получения сигнала датчика и генерирования выходного сигнала для управления указанным двигателем, причем указанное устройство управления содержит основное устройство управления и устройство управления подвеской;
канал для передачи данных между указанным основным устройством управления и устройством управления подвеской для передачи сигнала сброса подачи текучей среды на основное устройство управления, и
устройство управления тормозной системой, связанное с указанным устройством управления и генерирующее сигнал тормозной системы, при этом указанный сигнал тормозной системы выбирается из группы, состоящей из сигнала системы автоматического торможения (Automatic Braking System - ABS), сигнала тормозной системы с электронным управлением (Electronic Braking System - EBS) и комбинаций из них.
соединения датчика с устройством управления;
измерения клиренса транспортного средства посредством датчика и генерирования потока данных клиренса, указывающего на него;
передачи потока данных клиренса в устройство управления;
соединения двигателя с устройством управления;
соединения двигателя с клапаном, при этом клапан имеет отверстия, связанные с источником сжатой текучей среды, подушкой для текучей среды и атмосферой;
анализа потока данных клиренса для контроля высокочастотных и низкочастотных изменений клиренса транспортного средства;
фильтрации результатов обработки данных, связанных с периодическими изменениями в клиренсе транспортного средства;
сравнения отфильтрованных данных клиренса с пороговой величиной для определения, не превышают ли отфильтрованные данные клиренса пороговый уровень, и
селективного приведения в действие двигателя для селективного перемещения клапана на основании отфильтрованных данных клиренса для образования соединения между: источником сжатой текучей среды и подушкой для текучей среды в положении нагнетания, подушкой для текучей среды и атмосферой в положении выпуска и изолирования источника сжатой текучей среды, подушки для текучей среды и атмосферы друг от друга с невозможностью прохождения текучей среды в нейтральном положении.
Документы, цитированные в отчёте о поиске
Подвеска с продольными рычагами и система регулирования высоты с клапаном с управлением от двигателя, предназначенным для подвески
Комментарии