Автомобиль промышленного назначения с управляемым мостом в качестве гасителя колебаний - RU2469898C2
Код документа: RU2469898C2
Чертежи






Описание
Изобретение относится к подвеске управляемого жесткого моста, который посредством управляющего устройства подвижно соединен с рамой, кузовом или надстройкой транспортного средства, причем управляющее устройство содержит, по меньшей мере, один исполнительный блок, посредством которого происходит управление движением жесткого моста относительно рамы, кузова или надстройки в зависимости от, по меньшей мере, одного, зарегистрированного сенсорным блоком рабочего параметра транспортного средства.
В частности, тяжелые грузовые автомобили и автобусы нередко располагают дополнительно к управляемому водителем переднему мосту и ведомому, неуправляемому заднему мосту третьим мостом. Если такой третий мост расположен за ведомым мостом, то он называется задним поддерживающим мостом. Соответственно третий мост может быть расположен также перед ведомым мостом, причем в этом случае он называется передним поддерживающим мостом. В большинстве случаев такие поддерживающие мосты являются неведомыми и/или поднимаемыми, однако могут быть выполнены также в виде дополнительно ведомых мостов.
Кроме того, подвески разделяются на такие, в которых третий мост управляется водителем, в частности, посредством кинематической связи с управлением передним мостом, и такие, в которых третий мост управляется только за счет возникающих во время движения сил и/или за счет управления в зависимости от эксплуатационного состояния транспортного средства. Подобные, не связанные с собственно рулевым управлением транспортного средства мосты называются «свободно управляемыми мостами», иногда также «принудительно управляемыми мостами», в частности, если они управляются исключительно за счет сил, действующих на мост во время движения от дорожного полотна, прежде всего, за счет возникающих во время движения на поворотах боковых сил. В этой связи следует указать на то, что изобретение касается исключительно мостов названного последним типа, которые кинематически не связаны с управлением передним мостом транспортного средства.
Типовая подвеска с управляемым или жестким задним мостом известна из DE 29608229 U1. Описанное шарнирное сочленение заднего моста включает в себя два изменяемых по длине продольных рычага и треугольный рычаг. Описанная подвеска отличается, прежде всего, тем, что предусмотрены блок управления и соответствующие исполнительные органы, которые влияют на длину продольных рычагов таким образом, что их жесткий мост может совершать движение относительно рамы транспортного средства. При этом, прежде всего, исполнительные штанги продольных рычагов выполнены с возможностью управления таким образом, что в зависимости от скорости и/или при движении на поворотах выдвигание исполнительных штанг предотвращается или ограничивается, по меньшей мере, заданным предельным значением.
Далее из WO 2004/080783 известен управляемый мост, у которого за счет блокировки принудительно управляемого моста должна быть улучшена боковая устойчивость транспортного средства при движении на поворотах, если обнаружена критическая дорожная ситуация. Для этого регистрируется множество параметров транспортного средства, в том числе частота вращения колес, ускорения колес, значения буксования и тормозные моменты на отдельных колесах, а также углы поворота рулевого колеса, по зарегистрированным значениям определяется специфический для дорожной ситуации параметр, и если он принимает критическое значение, в частности при движении транспортного средства на повороте, блокируется управление принудительно управляемого моста.
Преимущество таких управляемых мостов, кинематически не связанных с собственно рулевым управлением, состоит, прежде всего, в минимизации износа шин при движении на поворотах, а также в повышении маневренности транспортного средства. Однако недостаток в том, что транспортные средства, располагающие одним или несколькими принудительно управляемыми мостами, как правило, имеют меньшую боковую жесткость шин, что, в частности, при повышенных скоростях может привести к уменьшению устойчивости при движении.
Помимо требований к транспортному средству в отношении ходовых свойств, в том числе к маневренности и устойчивости при движении, в настоящее время к ним предъявляются высокие требования в отношении комфортабельности езды. На нее, однако, часто оказывают негативные влияния возникающие в зависимости от дорожных условий и скорости движения колебания или вибрации ходовой части, рамы и/или надстроек транспортного средства.
В этой связи, например, из DE 10227888 A1 и DE 3843676 A1 известно расположение в зоне подвески или кузова транспортного средства гасителей колебаний, которые сами имеют колебательную массу. Подходящая сенсорика обнаруживает возникающие в транспортном средстве колебания, компенсируемые за счет встречных колебаний, которые выполняются возбужденными в зависимости от обнаруженных колебаний гасителями колебаний.
Исходя из известной в уровне техники проблематики, в основу изобретения была положена задача создания устройства, которое относительно простым и надежным образом компенсировало бы колебания, возникающие в транспортных средствах с двухосными тележками и, по меньшей мере, одним управляемым мостом. Устройство и основанный на нем способ должны найти применение предпочтительно в тяжелых автомобилях промышленного назначения (грузовики, автобусы и т.п.), часто имеющих надстройки большого объема. Прежде всего, соответствующее техническое решение должно, по меньшей мере, значительно сократить число необходимых гасителей колебаний, в частности для транспортных средств большого объема, например для туристических автобусов. Благодаря такому устройству для гашения колебаний должно быть также возможным компенсировать с помощью относительно простой стратегии измерения и регулирования возникающие в зависимости от скорости колебания в зоне надстройки, а также кузова, в частности в зоне каркаса автобуса.
Поставленная выше задача решается посредством специально выполненной подвески моста по п.1 и ее использования в грузовом автомобиле по п.14 формулы. Предпочтительные модификации изобретения являются объектом зависимых пунктов и более подробно поясняются ниже с частичной ссылкой на чертежи.
Изобретение основано на специальном выполнении подвески с управляемым жестким мостом, который посредством управляющего устройства подвижно соединен с рамой, кузовом или надстройкой транспортного средства, причем управляющее устройство содержит, по меньшей мере, один исполнительный блок, который управляет движением жесткого моста относительно рамы, кузова или надстройки в зависимости от, по меньшей мере, одного, зарегистрированного сенсорным блоком эксплуатационного параметра транспортного средства. Согласно изобретению, подвеска усовершенствована таким образом, что сенсорный блок содержит, по меньшей мере, один датчик колебаний, с помощью которого регистрируется колебание, по меньшей мере, одной детали транспортного средства и передается на блок управления, в котором на основе зарегистрированного колебания вырабатывается управляющий сигнал и подается на исполнительный блок, и на основе этого сигнала жесткий мост посредством исполнительного блока приводится в движение таким образом, что созданные за счет движения жесткого моста колебания, по меньшей мере, частично компенсируют зарегистрированные колебания, по меньшей мере, одной детали транспортного средства.
Благодаря предложенному решению сравнительно простым образом можно компенсировать колебания, возникающие во время движения в раме, кузове или надстройке, за счет ввода в транспортное средство через управляемый мост дополнительного колебания. С помощью сенсорики возникающие в транспортном средстве колебания сначала регистрируются, затем оцениваются в блоке управления, после чего управляемый жесткий мост движется с помощью подходящего исполнительного блока таким образом, что создаются колебания, по меньшей мере, в значительной степени взаимно уничтожаются с зарегистрированными колебаниями. За счет инициированного в зависимости от зарегистрированных колебаний движения управляемого моста вырабатываются силы, которые должны вводиться в раму, кузов или настройку и поглощаться ею. Поскольку эти силы с помощью исполнительного блока и подходящего регулирования варьируются предпочтительным образом по силе и периодичности, в частности в отношении частоты возбуждения, возбуждаются колебания надстройки или кузова, которые, по меньшей мере, в значительной степени взаимно уничтожаются с колебаниями, созданными в зависимости от качества дорожного полотна и/или скорости движения. Таким образом, с помощью дополнительно созданного колебания можно, например, гарантировать уменьшение или гашение воспринимаемых как неприятных колебаний, которые больше не воспринимаются как неприятные или даже вообще не ощущаются.
В одном предпочтительном варианте осуществления изобретения исполнительный блок содержит, по меньшей мере, один, приводимый в действие пневматически, электрически и/или гидравлически исполнительный цилиндр. Преимущественно в этой связи предусмотрен электрически-гидравлически приводимый исполнительный цилиндр, который в качестве исполнительного блока взаимодействует с принудительно управляемым жестким мостом таким образом, что в результате срабатывания исполнительного цилиндра движутся управляющее устройство и жесткий мост. В зависимости от выполнения управляющего устройства можно предусмотреть один или несколько исполнительных цилиндров, находящихся в активном соединении с управляющим устройством непосредственно или через подходящие связующие элементы.
В другом предпочтительном варианте осуществления изобретения подвеска моста содержит, по меньшей мере, один продольный рычаг. Предпочтительно в нижней зоне жесткого моста с обеих сторон предусмотрено по одному продольному рычагу, тогда как в верхней зоне на жестком мосту в его коленной зоне закреплен треугольный рычаг. В отношении особенно специальных модификаций изобретения можно придать каждому продольному рычагу в качестве исполнительного блока исполнительный цилиндр или даже интегрировать исполнительный цилиндр в продольный рычаг. В последнем варианте преимущественно сам продольный рычаг выполнен в виде цилиндра с соответствующим исполнительным штоком. В одном альтернативном варианте предусмотрен исключительно один исполнительный цилиндр, который одним концом закреплен со стороны транспортного средства, т.е. на раме, кузове или надстройке, тогда как другим концом он соединен с управляющим устройством и здесь, в частности, с продольным рычагом посредством связующего элемента.
В одном варианте осуществления изобретения в отношении связующего элемента предусмотрено, что он выполнен в виде установленного с возможностью вращения рычага, причем вращательное движение рычага происходит приблизительно в горизонтальном направлении. Преимущественно жесткий мост находится в активном соединении с рамой, кузовом или надстройкой посредством двух продольных и одного треугольного рычага, причем продольные рычаги одним концом соединены с рычагом, установленным посередине с возможностью вращения на надстройке, кузове или раме. Если в таком техническом решении рычаг движется исполнительным цилиндром, совершая вращательное движение, то оба продольных рычага автоматически движутся в продольном направлении транспортного средства, что вызывает вращательное движение всего жесткого моста. Это вращательное движение инициируется потому, что при вращении рычага продольные рычаги смещаются навстречу друг другу, так что, например, левый продольный рычаг тянется вперед, если смотреть в направлении движения, тогда как в то же самое время правый продольный рычаг смещается назад на ту же величину.
В другом предпочтительном варианте осуществления изобретения предусмотрено, что треугольный рычаг в коленной зоне обоих своих плеч посредством опоры закреплен на теле (балке) жесткого моста. Активные линии треугольного рычага пересекаются в этой точке, так что подвижный жесткий мост совершает, в конце концов, вокруг этой точки вращательное движение при движении продольных рычагов. Как только за счет срабатывания исполнительного блока и соответствующего движения управляющего устройства, например при помощи исполнительного цилиндра, произойдет управление принудительно управляемым задним мостом, ускоряется масса заднего моста, движущегося вокруг описанной точки вращения. За счет этого в зависимости от скорости вращения жесткого моста создается сила реакции, которая должна вводиться в раму, кузов или надстройку транспортного средства и поглощаться там. Созданные, таким образом, силы реакции могут изменяться за счет подходящего, преимущественно электрического регулирования между заданными предельными значениями по силе и периодичности, т.е. по своей частоте. За счет этого вызванного, согласно изобретению, ввода сил реакции в транспортное средство с помощью управляемого моста могут возбуждаться колебания транспортного средства, особенно рамы, кузова или надстройки. За счет подходящего выбора или настройки возбужденных колебаний предпочтительным образом возможна компенсация колебаний, возникающих в транспортном средстве вследствие качества дорожного полотна в сочетании со скоростью движения в данный момент. Для этого, согласно изобретению, предусмотрен блок управления и, по меньшей мере, один датчик колебаний, с помощью которых регистрируется и оценивается возникающее в зоне транспортного средства колебание, после чего вырабатывается исполнительный сигнал, передаваемый на описанный выше исполнительный блок.
В одном особом варианте осуществления изобретения продольный рычаг и/или треугольный рычаг закреплен удаленным от моста концом косвенно или непосредственно на раме, кузове или надстройке транспортного средства. В качестве крепежных средств рассматриваются обычно используемые конструктивные элементы, например опорные кронштейны с соответствующими опорными элементами, в частности когтевыми опорами. Крепление рычагов на мосту происходит также посредством известных опорных элементов, причем треугольный рычаг в своей коленной зоне сочленен с жестким мостом предпочтительно посредством когтевой опоры.
Выполненная, согласно изобретению, подвеска моста подходит, в частности, для применения в автомобилях промышленного назначения, которые в зоне ведомого заднего моста содержат так называемую двухосную тележку. По отношению к таким тележкам, используемым как в грузовых автомобилях большой грузоподъемности, так и в автобусах, следует указать на то, что нередко один из мостов является ведомым, тогда как выполненный в виде переднего или заднего поддерживающего моста второй мост не является ведомым. Разумеется, в принципе, можно выполнить передние или задние поддерживающие мосты в виде ведомых мостов. Кроме того, возможно выполнение переднего или заднего поддерживающего моста в виде поднимаемого моста.
Независимо от остального вида применения моста предложенная подвеска может применяться предпочтительным образом в сочетании со всеми управляемыми мостами, не находящимися в кинематической связи с управлением передним мостом, т.е. вне зависимости от того, идет ли речь о передних поддерживающих мостах, задних поддерживающих мостах, поднимаемых мостах, ведомых или управляемых жестких мостах. Предпочтительно выполненный, согласно изобретению, жесткий мост может применяться в тяжелых автомобилях промышленного назначения, в частности в туристических автобусах. Датчик колебаний регистрирует колебание рамы, кузова и/или надстройки автомобиля промышленного назначения, в частности каркаса автобуса. Исполнительный блок, находящийся в активном соединении с одной стороны с рамой, кузовом или надстройкой, а с другой стороны, по меньшей мере, с одной деталью управляющего устройства, на основе зарегистрированного и оцененного блоком управления колебания приводит жесткий мост в движение относительно рамы, кузова или надстройки. В этой связи жесткий мост движется так, что в результате этого движения в транспортное средство вводится колебание, которое, по меньшей мере, в значительной степени взаимно уничтожается с первоначально зарегистрированным колебанием рамы, кузова или надстройки.
Частично в автобусах в зависимости от скорости движения и основания дорожного полотна возникают колебания зоны крыши по отношению к зоне пола, причем нередко крыша и пол движутся в противоположных направлениях. Такие колебания каркаса автобуса возникают, прежде всего, потому, что центральная зона автобуса в противоположность передней и задней частям является менее жесткой, прежде всего, из-за больших оконных поверхностей, так что могут возникнуть встречные колебания зон крыши и пола. Такие колебания часто ощущаются как неприятные и, тем самым, ухудшают комфортабельность езды в автобусе.
Поэтому в одном особенно подходящем варианте осуществления изобретения, по меньшей мере, один датчик колебаний расположен в зоне каркаса автобуса, преимущественно в зоне крыши и/или пола. В этом варианте колебание каркаса автобуса регистрируется датчиком колебаний, и измеренные значения передаются на блок управления. На основе этих измеренных значений блок управления вырабатывает управляющий сигнал, передаваемый на исполнительный блок управляющего устройства, которое на его основе движется посредством исполнительного блока таким образом, что через управляемый жесткий мост в каркас автобуса вводятся колебания, которые компенсируются измеренными колебаниями каркаса автобуса в зоне крыши и/или пола. Благодаря описанной мере предпочтительным образом можно, тем самым, повысить комфортабельность езды для пассажиров, так что в зоне салона ощущаемые как мешающие колебания или вибрации больше не воспринимаются.
Изобретение более подробно поясняется ниже без ограничения общей изобретательской идеи со ссылкой на чертежи, на которых изображают:
- фиг.1: подвеска моста с двумя продольными и одним треугольным рычагами, исполнительным цилиндром в качестве исполнительного блока и рычагом в качестве связующего элемента;
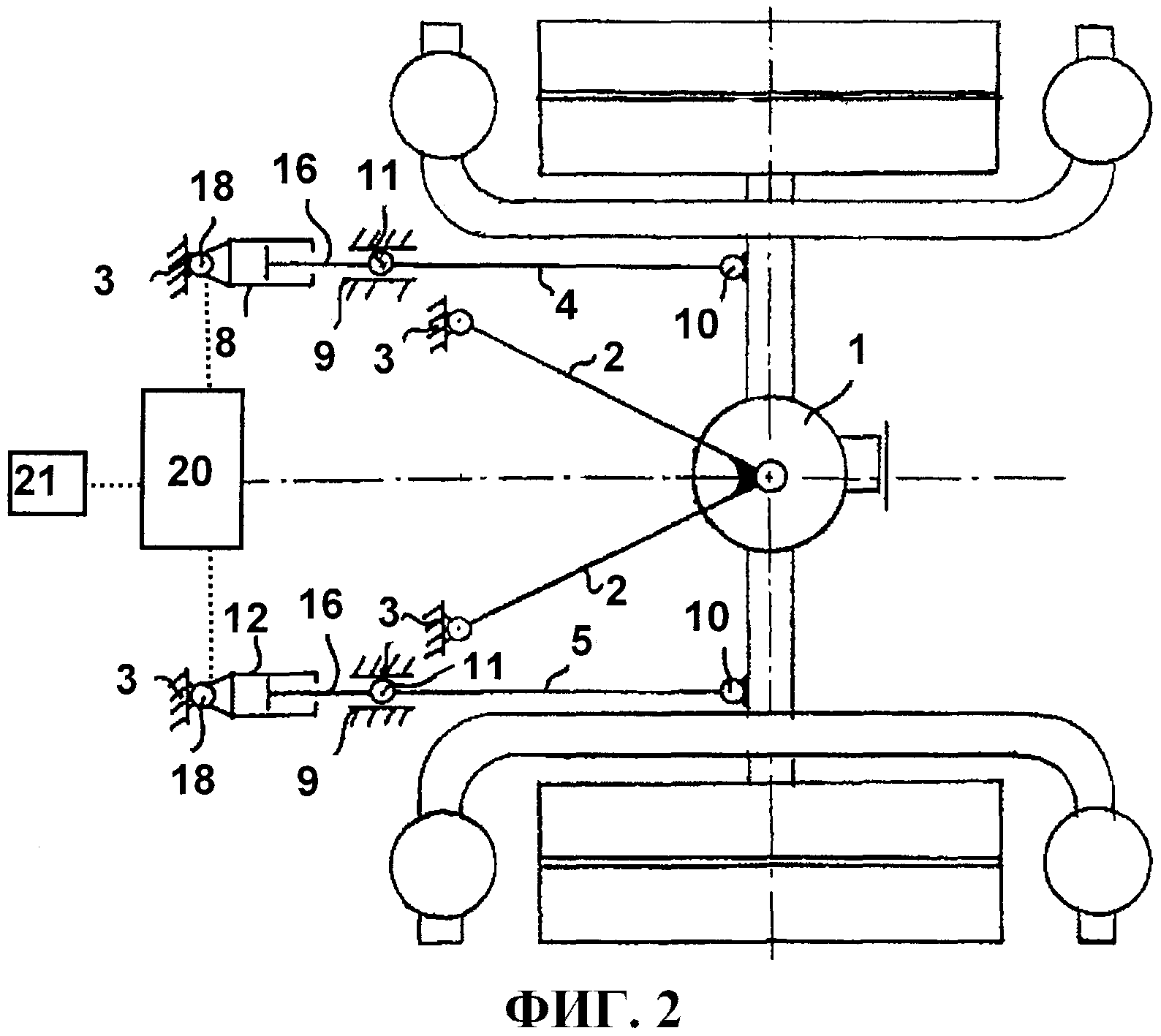
- фиг.2: подвеска моста с двумя продольными и одним треугольным рычагами, а также двумя исполнительными цилиндрами в качестве исполнительного блока;
- фиг.3: подвеска моста с одним треугольным рычагом и двумя продольными рычагами, выполненными соответственно в качестве исполнительного блока;
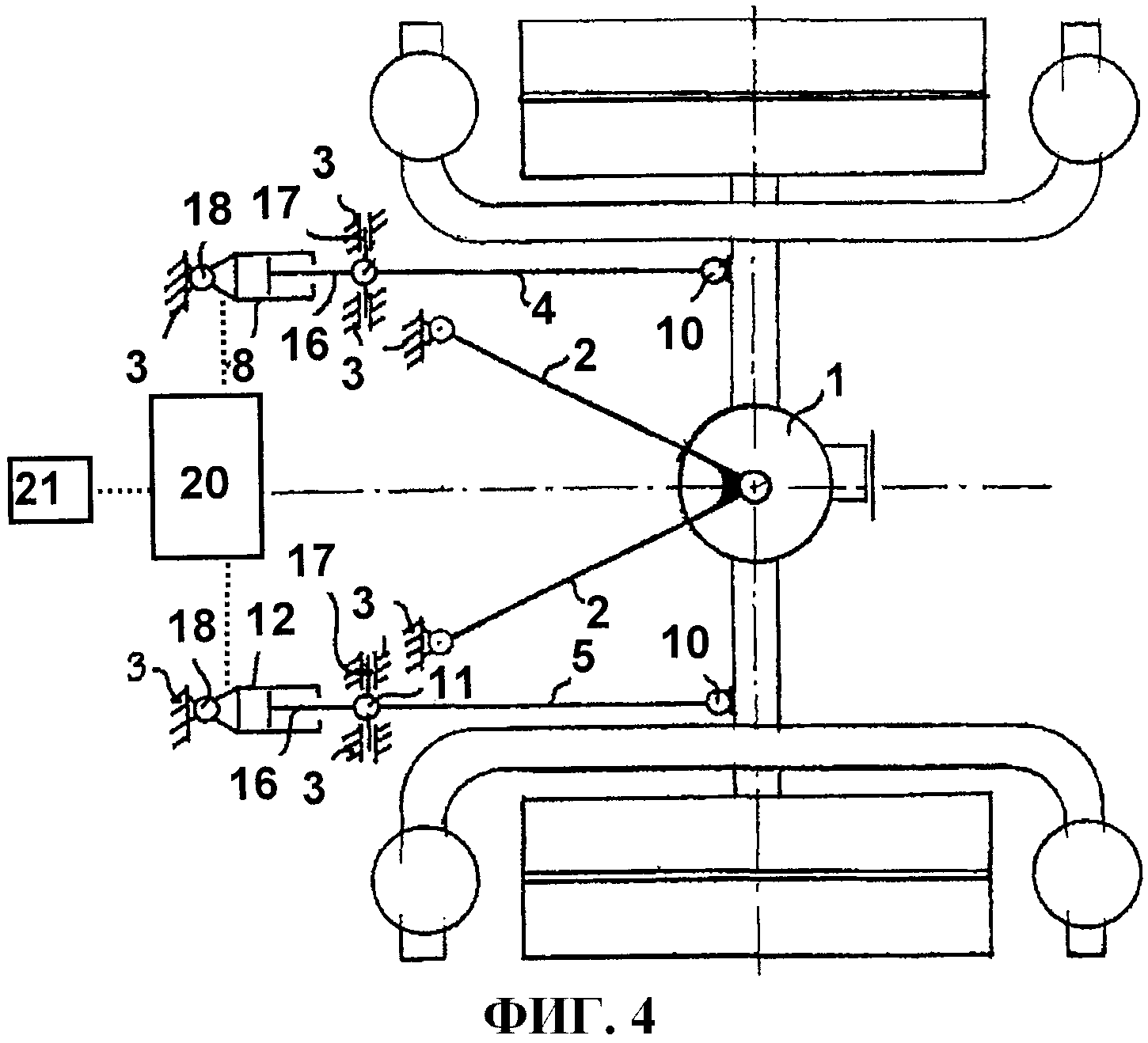
- фиг.4: подвеска моста с двумя продольными и одним треугольным рычагами, а также двумя шарнирно сочлененными с продольными рычагами исполнительными цилиндрами;
- фиг.5: частный случай ввода колебаний по отношению к фиг.4;
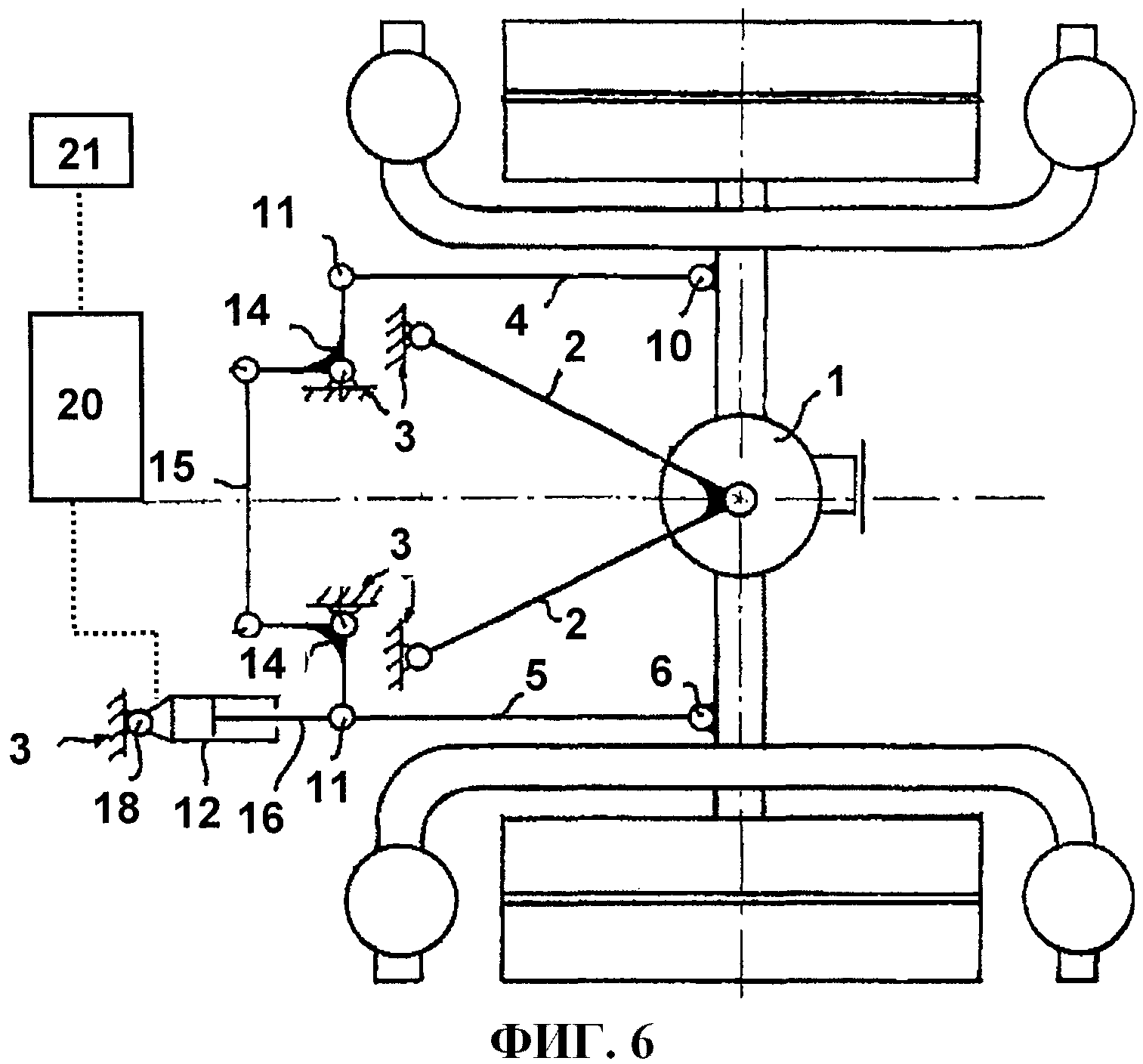
- фиг.6: подвеска моста с двумя продольными и одним треугольным рычагами, поперечной рулевой тягой и исполнительным цилиндром;
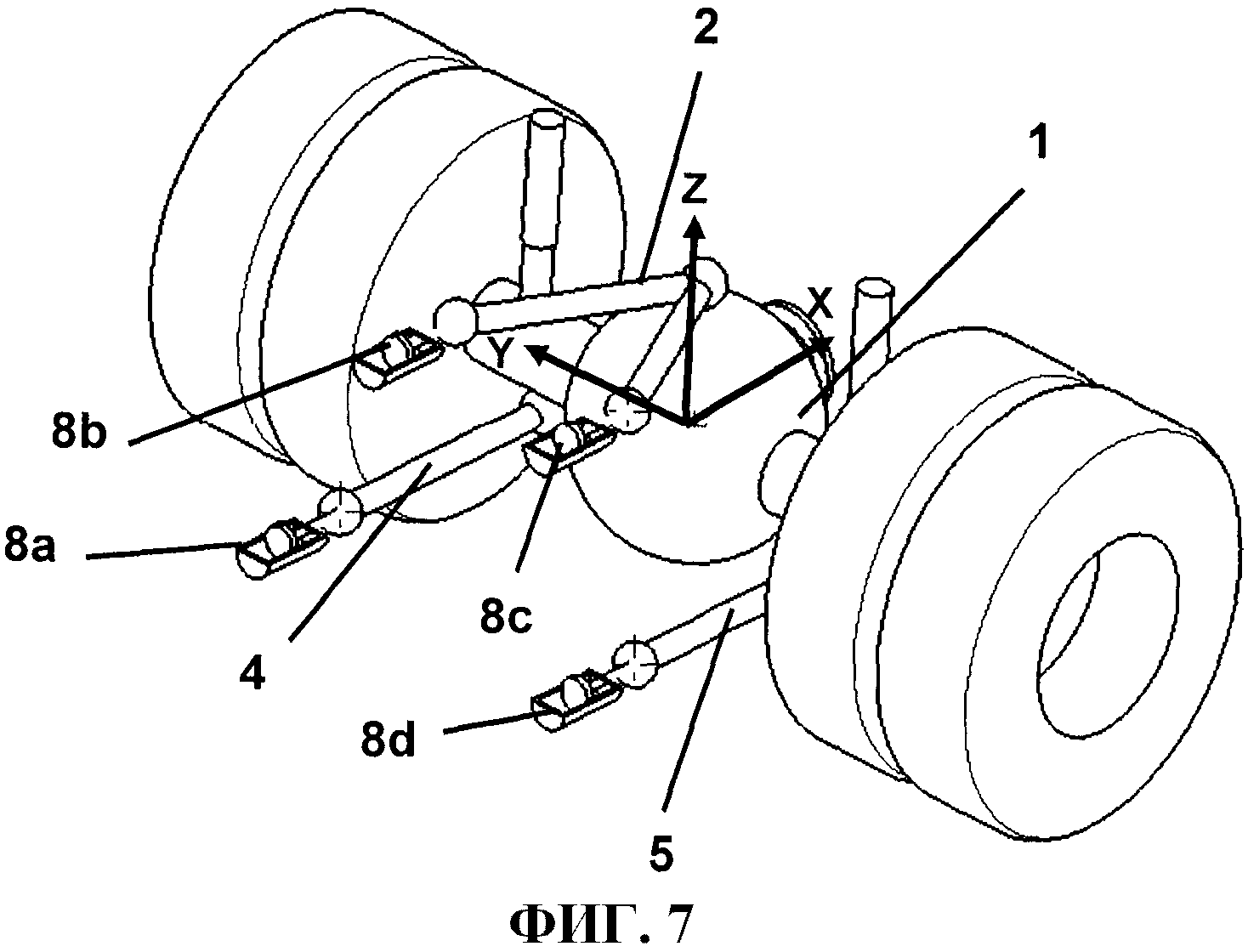
- фиг.7: изометрический вид ведомого жесткого моста с четырьмя исполнительными цилиндрами в нейтральном положении;
- фиг.8: вид сверху ведомого жесткого моста с четырьмя исполнительными цилиндрами в нейтральном положении;
- фиг.9: вид сбоку ведомого жесткого моста с четырьмя исполнительными цилиндрами в нейтральном положении;
- фиг.10: виды сверху и сбоку ведомого жесткого моста с четырьмя исполнительными цилиндрами и движением моста вокруг вертикальной оси z;
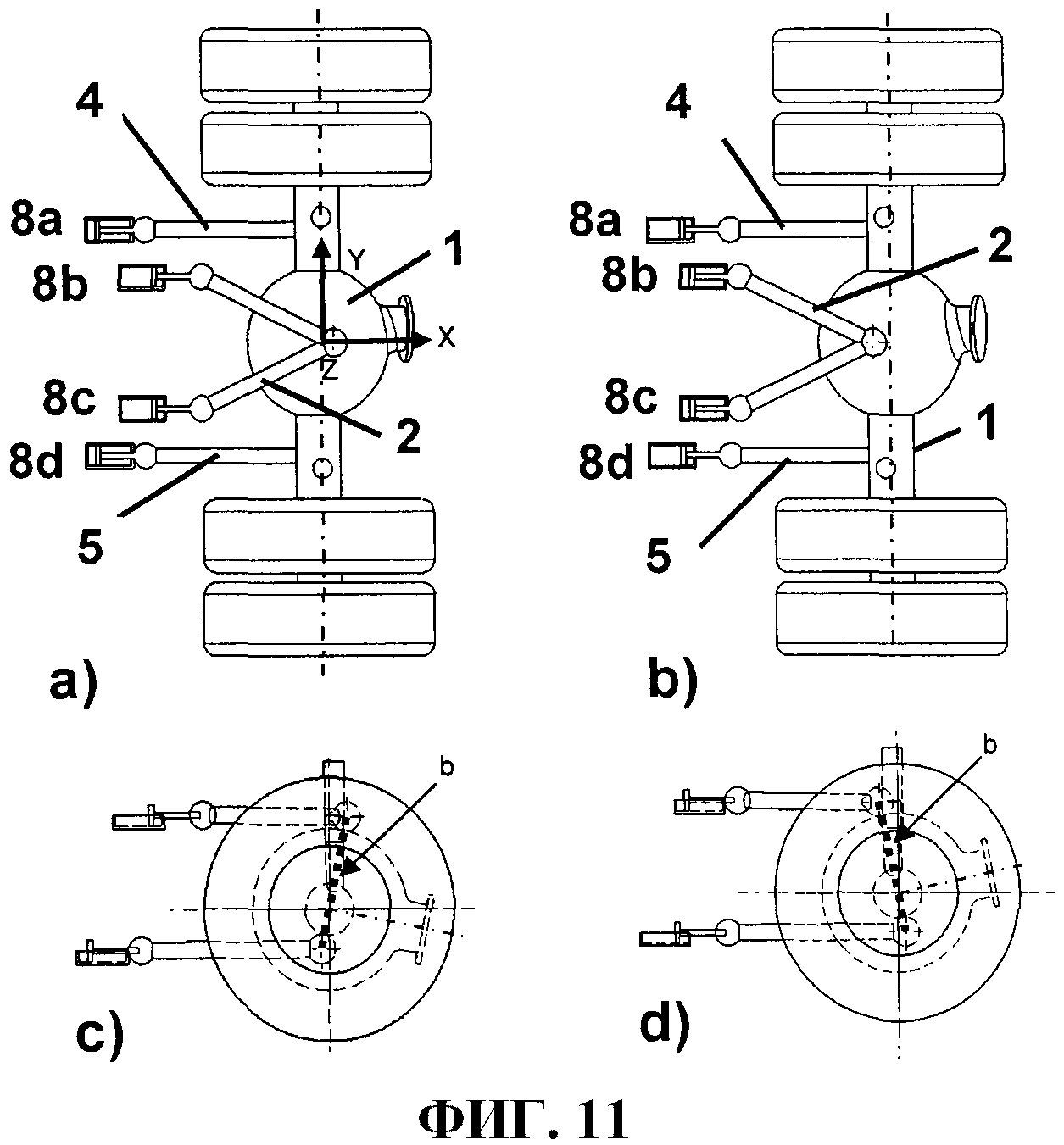
- фиг.11: виды сверху и сбоку ведомого жесткого моста с четырьмя исполнительными цилиндрами и движением моста вокруг оси y, проходящей поперек направления движения;
- фиг.12: виды сверху и сбоку ведомого жесткого моста с четырьмя исполнительными цилиндрами и движением моста вокруг оси х, проходящей вдоль направления движения;
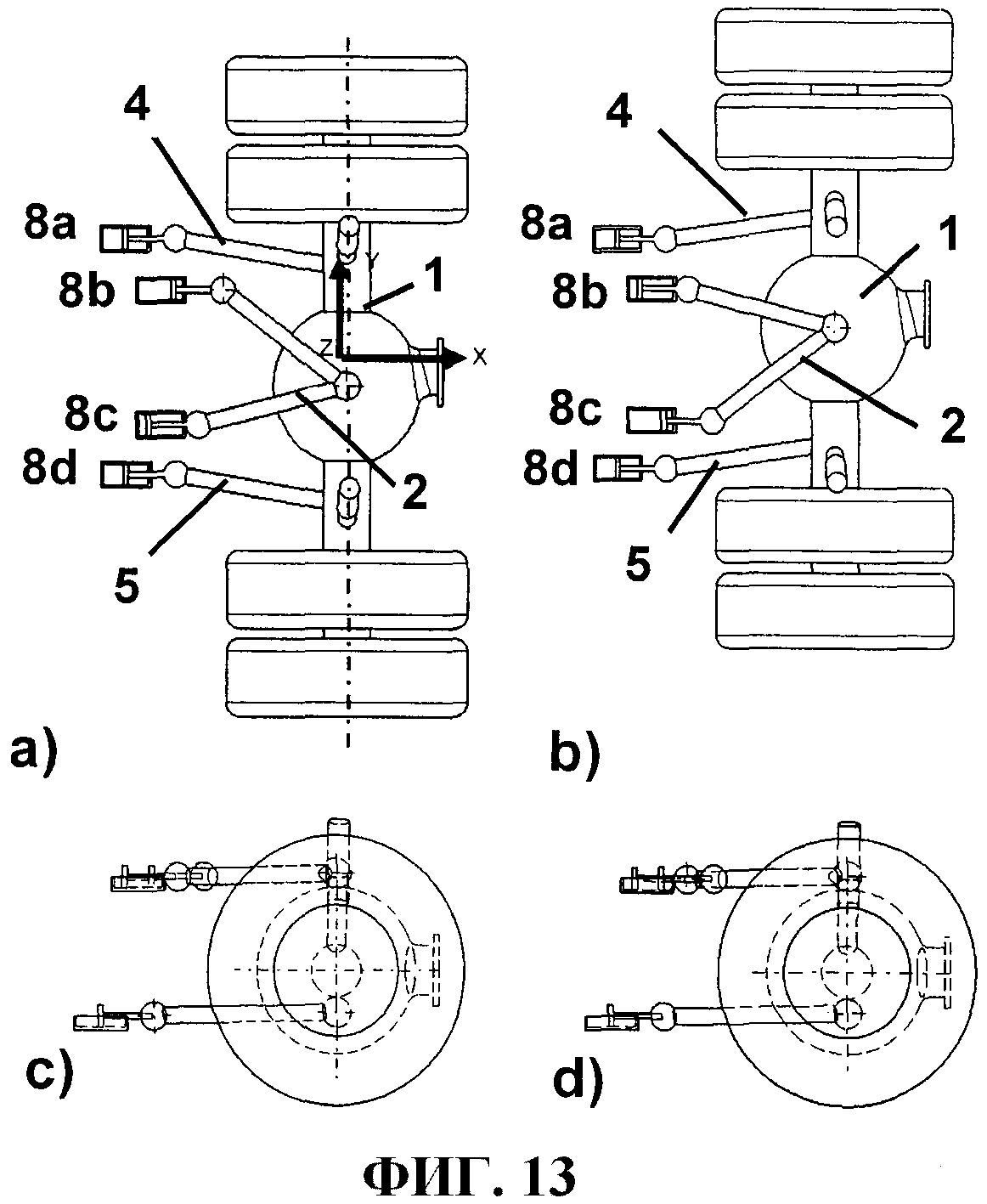
- фиг.13: виды сверху и сбоку ведомого жесткого моста с четырьмя исполнительными цилиндрами и поступательным движением моста в плоскости, образованной проходящей поперек направления движения осью y и проходящей вдоль направления движения осью х.
На чертежах изображены управляемые жесткие мосты 1, используемые в автомобилях промышленного назначения. При этом изобретение описано на примере управления ведомыми жесткими мостами автобусов. Поскольку двигатель автобусов находится, как правило, в задней части, связь выполненного в виде карданного вала приводного вала происходит на обратной стороне моста 1. Если смотреть от моста, то продольные рычаги 4, 5 и треугольный рычаг 2 проходят, тем самым, в направлении движения автобуса.
Предпочтительное применение выполненного, согласно изобретению, управляемого сочленения моста в автобусах, в частности в туристических автобусах, объясняется, прежде всего, тем, что в трехосных туристических автобусах нередко, несмотря на хорошие дорожные условия на скоростях 80-100 км/ч, возникают колебания надстройки, т.е. каркаса автобуса. В этих случаях каркас крыши испытывает колебания поперек направления движения. Каркас пола также испытывает колебания поперек направления движения, однако в противоположном направлении.
Поскольку каркас крыши соединен с нижним каркасом только посредством сравнительно небольшого числа жестких оконных стоек, а также каркасов передней и задней частей, происходит так, что крыша в этом месте колеблется, например, влево, тогда как каркас пола - вправо. Эта встречная колебательная характеристика воспринимается пассажирами определенных рядов сидений как некомфортная вибрация. Описанные колебания каркаса автобуса, которые могут возникать, разумеется, аналогичным образом в рамах, кузовах автомобилей или надстройках грузовых автомобилей или их прицепов и/или полуприцепов, предпочтительным образом компенсируются подробно описанными ниже подвесками управляемых задних мостов.
На фиг.1 изображен управляемый задний мост 1 автомобиля промышленного назначения, который кинематически не связан с управлением переднего моста и содержит на своих концах колеса со сдвоенными шинами. При этом жесткий задний мост 1 посредством треугольного рычага 2 соединен с каркасом 3 автобуса. В своей коленной зоне треугольный рычаг 2 соединен с телом (балкой) жесткого моста 1 посредством опоры, преимущественно когтевой опоры. Оба плеча треугольного рычага 2 с помощью подходящих опорных кронштейнов соединены с каркасом 3 автобуса. Кроме того, предусмотрены два продольных рычага 4, 5, которые одним концом с помощью подходящих опор 10 соединены с жестким мостом 1, а другим, удаленным от моста концом с помощью связующего элемента 7 - с каркасом 3. Соединение продольных рычагов 4, 5 со связующим элементом 7 осуществляется посредством опор 11. Связующий элемент 7 установлен с возможностью вращения вокруг точки 6 приблизительно в горизонтальном направлении таким образом, что при его вращении оба продольных рычага 4, 5 движутся в направлении своей протяженности.
На одной стороне связующий элемент 7 находится в активном соединении с выполненным в виде исполнительного цилиндра 12 исполнительным блоком 8. Исполнительный цилиндр 12 содержит приводимый в движение гидравлически исполнительный шток 16, который, в свою очередь, внецентрично сочленен со связующим элементом 7. В свою очередь, исполнительный цилиндр 12 посредством подходящей опоры 18 закреплен на каркасе 3. При срабатывании исполнительного цилиндра 12 связующий элемент 7 приводится в горизонтальное вращательное движение вокруг точки 6 вращения. Если вращательное движение происходит, например, по часовой стрелке, то продольный рычаг 4 подвергается давлению, в то время как находящийся на противоположной стороне транспортного средства продольный рычаг 5 тянется связующим элементом 7. За счет этих движений связующего элемента 7 и продольных рычагов 4, 5 управляемый задний мост 1 вращается вокруг точки А в коленной зоне треугольного рычага 2.
Вращательное движение управляемого заднего моста 1 вокруг точки А приводит к тому, что его масса ускоряется и в зависимости от скорости вращения создаются соответствующие силы реакции. Через опоры, соответственно, или точки сочленения треугольного рычага 2 и исполнительного цилиндра 12 эти силы реакции вводятся в каркас 3 и воспринимаются или поглощаются им.
Управление исполнительным цилиндром 12 происходит с помощью подходящей сенсорики и блока 20 управления. В этой связи предусмотрен датчик 21 колебаний, расположенный преимущественно в зоне крыши и/или пола автобуса. При возникновении колебаний в этих зонах они обнаруживаются датчиком 21 и соответствующие измеренные значения передаются на блок 20 управления. В нем на основе зарегистрированных значений колебаний вырабатываются управляющие сигналы, передаваемые на исполнительный цилиндр 12. На основе управляющих сигналов исполнительный цилиндр 12 движется таким образом, что через управляющее устройство, содержащее треугольный рычаг 2, два продольных рычага 4, 5 и соответствующие опорные, соответственно, соединительные элементы, и также через жесткий мост 1 в каркас 3 преимущественно периодически вводятся силы реакции. При этом введенные силы реакции рассчитываются таким образом, что это вызывает колебания в каркасе 3, которые, по меньшей мере, в значительной степени взаимно уничтожаются или гасятся зарегистрированными измерительным датчиком 21 колебаниями каркаса 3.
За счет описанного гашения колебаний, достигаемого активно вызванным наложением различных колебаний, можно, тем самым, предпочтительным образом гарантировать комфортабельность езды, достаточную в отношении колебательной характеристики автомобиля промышленного назначения, в частности туристических автобусов.
В этой связи полноты ради следует указать на то, что предложенный функциональный принцип, т.е. измерение колебаний, их оценка и ввод дополнительного колебания в каркас автобуса или в кузов или раму транспортного средства, осуществляется с помощью управления жестким мостом на основе зарегистрированных колебаний со всеми изображенными на фиг.1-13 сочленениями. Прежде всего, со всеми изображенными на фиг.1-13 сочленениями управляемых мостов предпочтительным образом возможен ввод колебаний в каркас автобуса, надстройку или раму транспортного средства для компенсации или гашения колебаний, возникающих в зависимости от качества дорожного полотна и скорости движения. При этом активное вмешательство в управление жестким мостом для компенсации колебаний может осуществляться с произвольными частотой и амплитудой, чтобы ввести в надстройку транспортного средства, например, поперечные силы и/или моменты, подходящие для гашения или демпфирования ее колебаний.
У изображенной на фиг.2 подвески управляемого заднего моста 1 управление жестким мостом 1 происходит также за счет встречного движения продольных рычагов 4, 5, расположенных на разных сторонах транспортного средства. В противоположность варианту на фиг.1 каждый продольный рычаг 4, 5 соединен с выполненным в виде исполнительного цилиндра 12 исполнительным блоком 8. Удаленные от моста опоры 11 продольных рычагов 4, 5 соединены с исполнительными штоками 16 исполнительных цилиндров 12 и проходят в соединенных с каркасом 3 скользящих шарнирах 9 (поступательных кинематических парах). За счет перемещения исполнительных штоков 16 посредством скользящих шарниров 9 происходит перемещение продольных рычагов 4, 5 приблизительно параллельно продольной оси транспортного средства. Соединение обоих продольных рычагов 4, 5 между собой в этом случае отсутствует. Напротив, предусмотрены два исполнительных цилиндра 12, находящихся в активном соединении с продольными рычагами 4, 5.
На фиг.3 изображен другой вариант подвески, у которой сами продольные рычаги 4, 5 выполнены в виде исполнительных цилиндров 12. Движение управляемого заднего моста 1 происходит в этом случае за счет укорачивания или удлинения выполненных в виде исполнительных цилиндров 12 продольных рычагов 4, 5. Исполнительные блоки 8 и продольные рычаги 4, 5 образуют соответственно конструктивный элемент.
Если с помощью датчика 21 колебаний в зоне надстройки обнаруживается колебание, то блок 20 обработки оценивает его и посылает выведенные из него исполнительные сигналы на оба выполненных в виде исполнительных цилиндров 12 продольных рычага 4, 5. В соответствии с переданными исполнительными сигналами продольные рычаги 4, 5 укорачиваются или удлиняются, в результате чего задний мост 1 приводится преимущественно в периодические движения. Величина сил реакции и частота их возникновения выбираются так, чтобы активно введенные в надстройку 3 колебания подходящим образом накладывались на обнаруженные датчиком 21 колебания, гася зарегистрированные колебания надстройки 3.
В изображенном на фиг.4 и 5 варианте подвески продольные рычаги 4, 5 движутся посредством двух отдельно закрепленных на каркасе 3 исполнительных цилиндров 12. В противоположность продольным рычагам 4, 5 на фиг.2 здесь они установлены со стороны рамы не в скользящем шарнире 9, а соединены с каркасом 3 с возможностью вращательного движения посредством предусмотренных с каждой стороны транспортного средства вертикальных рычагов 17. При этом подвеска изображена на фиг.4 на виде сверху, а на фиг.5 - при виде сбоку.
За счет исполнительного движения исполнительных цилиндров 12, в частности исполнительных штоков 16, продольные рычаги 4, 5 приводятся в движение приблизительно параллельно продольной оси транспортного средства. Направление продольных рычагов 4, 5 обеспечивается вертикальными рычагами 17. Также в этом случае для вращения жесткого моста продольные рычаги 4, 5 движутся в противоположных направлениях, причем удаленные от моста опоры 11 продольных рычагов 4, 5 совершают вращательное движение вокруг соединенных с каркасом опор вертикальных рычагов 17. Когда продольные рычаги 4, 5 перемещаются вокруг образующих эти точки вращения опоры 19 навстречу друг другу, также в этом случае управляемый жесткий мост 1 поворачивается вокруг точки А, т.е. точки сочленения в коленной зоне треугольного рычага 2 с жестким мостом 1. Привод и блокировка происходят, как и в остальных вариантах, посредством подходящего управления исполнительными цилиндрами 12.
Обозначенный буквой «Х» фрагмент изображенного на фиг.5 вида сбоку показывает особый вариант подвески. Отличие от подвески на фиг.4 и 5 состоит в том, что оба плеча треугольного рычага 2 своими удаленными от моста концами, соответственно, вместе с верхним концом вертикального рычага 17 закреплены на каркасе 3 посредством общего опорного кронштейна.
Изображенная на фиг.6 подвеска аналогична подвеске на фиг.1 в том отношении, что для управления жесткой осью 1 предусмотрены только один исполнительный цилиндр 12 в качестве исполнительного блока 8 и связующий элемент 7. В этом техническом решении последний образован по существу двумя отклоняющими рычагами 14, поперечной рулевой тягой 15 и подходящими опорными, соответственно, соединительными элементами. Продольные рычаги 4, 5 подвижно соединены между собой посредством обоих отклоняющих рычагов 14, закрепленных, в свою очередь, на каркасе 3, и посредством поперечной рулевой тяги 15.
Исполнительный цилиндр 12 может быть закреплен на выбор с правой или левой стороны каркаса. При срабатывании исполнительного цилиндра 12 продольный рычаг 5, находящийся на той же стороне транспортного средства, что и он, движется непосредственно, тогда как продольный рычаг 4, находящийся на противоположной стороне, движется посредством отклоняющих рычагов 14 и поперечной рулевой тяги 15.
На фиг.7-9 изображен ведомый жесткий мост 1 с выполненным, согласно изобретению, сочленением. При этом на фиг.7 изображен изометрический вид, на фиг.8 - вид сверху, а на фиг.9 - вид сбоку ведомого жесткого моста 1. В направлении движения на обратной стороне моста 1 находится фланец для закрепления карданного вала. Мост 1 предпочтительным образом используется в качестве ведущего моста автобуса.
В противоположность уже описанным сочленениям моста в этом случае на обоих плечах треугольного рычага 2 и на продольных рычагах 4, 5 предусмотрены выполненные в виде исполнительных цилиндров исполнительные блоки 8а, 8b, 8c, 8d, с помощью которых мост в зависимости от обнаруженного датчиком 21 колебания и выработанного из него в блоке 20 управления исполнительного сигнала движется таким образом, что обнаруженное колебание в кузове или надстройке, по меньшей мере, в значительной степени гасится дополнительно введенным колебанием. Разумеется, также в связи с примером на фиг.7-9 можно заменить комбинацию из исполнительного цилиндра и рычага одним исполнительным цилиндром соответствующей длины, причем в этом случае исполнительный шток исполнительного цилиндра выполняет заодно функцию рычага.
На фиг.7 жесткий мост 1 изображен при движении по прямой. Исполнительные цилиндры 8а, 8b, 8c, 8d находятся в нейтральном положении, так что не происходит ни движения моста вдоль оси y, ни вращения вокруг оси z. Точно так же в этом эксплуатационном состоянии отсутствует смещение по высоте, так что не происходит также никакого движения в вертикальном направлении.
В дополнение к изображению жесткого моста 1 на фиг.7 фиг.8 показывает вид сверху, а фиг.9 - вид сбоку, причем исполнительные цилиндры 8 находятся в нейтральном положении, как сказано выше.
На фиг.10 также изображен ведомый жесткий мост 1, у которого плечи треугольного рычага 2 и продольные рычаги 4, 5 соединены с рамой и/или кузовом, или надстройкой с возможностью движения посредством выполненных в виде исполнительных цилиндров исполнительных блоков 8. В противоположность режиму движения на фиг.7-9 на фиг.10а показано движение жесткого моста 1 вокруг оси z влево, а на фиг.10b - движение вокруг оси z вправо. Вращение происходит вокруг центрального шарнира в коленной зоне треугольного рычага 2. Как следует из соответствующих видов сбоку на фиг.10с, 10d, также здесь дополнительно к вращательному движению жесткого моста 1 вокруг оси z не происходит его движения в вертикальном направлении. Кроме того, за счет изменения отношения хода исполнительных цилиндров 8а, 8d на продольных рычагах 4, 5 к ходу исполнительных цилиндров 8b, 8с на треугольном рычаге 2 точку вращения можно сместить вдоль соединительных прямых «а», расположенных со стороны моста шарниров продольных и треугольного рычагов.
Перемещение исполнительных цилиндров 8 происходит в зависимости от исполнительного сигнала, вырабатываемого блоком 20 управления. Чтобы достичь показанного вращения моста 1, внешние исполнительные цилиндры 8а, 8d движутся в противоположном направлении, тогда как внутренние исполнительные цилиндры 8b, 8с остаются в нейтральном положении.
Также на фиг.11 изображен ведомый жесткий мост, у которого плечи треугольного рычага 2 и продольные рычаги 4, 5 соединены с рамой и/или кузовом, соответственно, надстройкой с возможностью движения посредством выполненных в виде исполнительных цилиндров исполнительных блоков 8. В противоположность режиму движения на фиг.7-9, 10 на фиг.11 показано движение жесткого моста 1 вокруг оси y, т.е. вращение моста в вертикальной плоскости. Режим движения, показанный на фиг.11а на виде сверху, а на фиг.11с - на виде сбоку, представляет собой вращение моста 1 в продольном направлении транспортного средства, т.е. вперед, тогда как на фиг.11b, 11d - вращение моста 1 против продольного направления транспортного средства, т.е. назад. Смещения ведомого жесткого моста 1 в вертикальном направлении или движения вокруг оси z не происходит. Вращение ведомого моста 1 вызвано в этом случае тем, что воздействующие на продольные рычаги 4, 5 исполнительные цилиндры 8а, 8d движутся в одном направлении, а воздействующие на треугольный рычаг исполнительные цилиндры 8b, 8c движутся также в одном направлении, однако навстречу воздействующим на продольные рычаги 4, 5 исполнительным цилиндрам 8а, 8d. За счет изменения отношения хода исполнительных цилиндров 8а, 8d на продольных рычагах 4, 5 к ходу исполнительных цилиндров 8b, 8с, предусмотренных на треугольном рычаге 2, точку вращения можно сместить вдоль соединительных прямых «b», проходящих через расположенные со стороны моста шарниры продольных и треугольного рычагов.
На фиг.12 изображено другое эксплуатационное состояние жесткого моста 1 с выполненным, согласно изобретению, сочленением, содержащим четыре выполненных в виде исполнительных цилиндров исполнительных блока 8а, 8b, 8c, 8d. На фиг.12 показано вызванное срабатыванием исполнительных цилиндров 8 смещение жесткого моста 1 в направлении х, причем фиг.12а, 12с показывают на виде сверху и сбоку смещение моста 1 в направлении движения, а фиг.12b, 12d - против него. Чтобы обеспечить такое движение моста в направлении х, управление сочленением происходит таким образом, что все четыре исполнительных цилиндра 8а, 8b, 8c, 8d движутся в одном направлении, а именно в нужном направлении движения жесткого моста 1.
В заключение на фиг.13 изображено эксплуатационное состояние жесткого моста 1 с выполненным, согласно изобретению, сочленением, содержащим четыре выполненных в виде исполнительных цилиндров исполнительных блока 8а, 8b, 8c, 8d, в котором мост смещен вдоль оси y, т.е. поперек направления движения. При этом фиг.13а, 13с показывают на виде сверху и сбоку смещение в левую сторону транспортного средства, если смотреть в направлении движения, тогда как фиг.13b, 13d показывают смещение моста вправо.
Чтобы в зависимости от эксплуатационных параметров автобуса, в частности его колебательной характеристики, достичь смещения сочлененного, согласно изобретению, жесткого моста 1 в направлении y, внешние, связанные с продольными рычагами 4, 5 исполнительные цилиндры 8а, 8d остаются в нейтральном положении, тогда как внутренние, связанные с плечами треугольного рычага 2 исполнительные цилиндры 8b, 8c движутся противоположно. В показанных на фиг.13 эксплуатационных состояниях для смещения моста влево, как показано на фиг.13а, 13с, правый 8b из воздействующих на треугольный рычаг 2 исполнительных цилиндров 8b, 8с движется по отношению к направлению движения назад, а левый 8с - вперед. Для смещения жесткого моста вправо, как показано на фиг.13b, 13d, исполнительные цилиндры 8b, 8c движутся в противоположном направлении.
С помощью управляемых описанным выше образом жестких мостов, комбинированных с подходящим управлением и сенсорикой, предпочтительным образом можно за счет ввода колебаний компенсировать колебания, возникающие в зоне надстройки транспортного средства, в частности в каркасе автобуса. Таким образом, на систему управления накладывается в некотором роде управляющее колебание в виде вращения вокруг оси z и/или y и/или поступательное смещение в направлении х и/или y с произвольными частотой и амплитудой, чтобы, при необходимости, ввести в кузов или надстройку моменты и/или поперечные силы. За счет дополнительно введенных колебаний можно сравнительно простым образом погасить или демпфировать колебания, возникающие в кузове и/или надстройке.
Предпочтительным в описанных управляющих устройствах для управляемых жестких мостов для гашения колебаний является, с одной стороны, то, что число необходимых в транспортном средстве гасителей колебаний можно, по меньшей мере, уменьшить, а, с другой стороны, то, что гашение колебаний представляет собой дополнительную функцию, которую жесткие мосты могут выполнять без ограничения необходимой в остальном функциональности.
Так, например, возможно, чтобы описанные с помощью фиг.1-13 исполнительные блоки смещали управляемый задний мост в зависимости от необходимой динамики движения одно- или встречно направленно по отношению к повороту управляемых колес на переднем мосту. Соответствующие параметры могут сохраняться в блоке управления. При этом встречно направленное срабатывание обоих мостов дает то преимущество, что транспортное средство может проходить меньшие круги поворота. Однонаправленное срабатывание, напротив, повышает устойчивость движения при изменении колеи во время быстрого движения транспортного средства. Поскольку каждый рычаг моста сочленен отдельно посредством исполнительного цилиндра, мост может предпочтительным образом настраиваться электронным путем. С помощью подходящей настройки исполнительных цилиндров, как это пояснялось, в частности, в связи с фиг.10-13, можно оптимизировать позиционирование моста относительно карданного вала, позиционировать мост посередине транспортного средства и/или обеспечить движение транспортного средства по прямой или предотвратить так называемое «влияние» (отклонения из стороны в сторону). Далее при использовании электронного регулирования исполнительных цилиндров можно компенсировать неточности кинематики. Кроме того, за счет воздействия на движение жесткого моста в вертикальном направлении можно способствовать эффективности подвески транспортного средства и поддерживать в значительной степени постоянными ходы пружин подвески. Благодаря такой мере можно, например, увеличить срок службы карданного вала и/или достичь одновременного упора в предусмотренных для этого резиновых амортизаторах при прогибе, в частности баллонов пневматических рессор.
Следует подчеркнуть, что, несмотря на описанные меры, в частности активное перерегулирование управляющего устройства для компенсации колебаний, управляющее устройство в значительной степени не оказывает влияния на подвеску и кинематику выполненного жестким заднего моста.
Перечень ссылочных позиций
1 - управляемый жесткий мост
2 - треугольный рычаг
3 - рама/каркас автобуса
4 - продольный рычаг
5 - продольный рычаг
6 - точка вращения связующего элемента
7 - связующий элемент
8 - исполнительный блок
9 - скользящий шарнир
10 - опора продольного рычага со стороны моста
11 - опора продольного рычага, удаленная от моста
12 - исполнительный цилиндр
13 - соединительный элемент между исполнительным блоком и продольным рычагом
14 - отклоняющий рычаг
15 - поперечная рулевая тяга
16 - исполнительный шток
17 - вертикальный рычаг
18 - опора исполнительного блока на раме или каркасе автобуса
19 - опора вертикального рычага на раме или каркасе автобуса
20 - блок управления
21 - датчик колебаний
Реферат
Изобретение относится к подвеске управляемого жесткого моста. Автомобиль промышленного назначения с двухосной тележкой содержит управляемый жесткий мост и управляющее устройство. Жесткий мост посредством управляющего устройства подвижно соединен с рамой, кузовом или надстройкой транспортного средства. Управляющее устройство содержит, по меньшей мере, один исполнительный блок. Исполнительный блок выполнен с возможностью управления движением жесткого моста относительно рамы, кузова или надстройки. Управление движением происходит в зависимости, по меньшей мере, от одного зарегистрированного сенсорным блоком рабочего параметра транспортного средства. Сенсорный блок содержит, по меньшей мере, один датчик колебаний, выполненный с возможностью регистрации колебаний, по меньшей мере, одной детали транспортного средства и передачи на блок управления. Блок управления выполнен с возможностью вырабатывания на основе зарегистрированного колебания управляющего сигнала и его подачи на исполнительный блок. На основе этого сигнала жесткий мост приводится в движение исполнительным блоком таким образом, что созданные за счет движения жесткого моста колебания, по меньшей мере, частично компенсируют зарегистрированные колебания, по меньшей мере, одной детали транспортного средства. Достигается возможность компенсировать колебания, возникающие во время движения в раме, кузове или надстройке. 2 н. и 14 з.п. ф-лы, 25 ил.
Комментарии