Подвеска задних колес и моторное транспортное средство - RU2619147C2
Код документа: RU2619147C2
Чертежи





Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится, в целом, к подвеске задних колес моторного транспортного средства, в частности, легковых автомобилей, вседорожников (SUV) и легких грузовиков. Более конкретно, настоящее изобретение относится к подвеске задних колес, как определено в преамбуле пункта 1 формулы изобретения. Настоящее изобретение также относится к моторному транспортному средству, содержащему такую подвеску задних колес.
ИЗВЕСТНЫЙ УРОВЕНЬ ТЕХНИКИ
Подвеска задних колес для моторного транспортного средства соединяет конструкцию подрессоренной массы транспортного средства с конструкцией неподрессоренных и вращающихся задних колес и ассоциированных шин, задних колес в сборе с шинами. Кроме того, подвеска задних колес управляет траекторией движения задних колес в сборе с шинами относительно внешнего воздействия от дороги, а также относительно внутреннего воздействия от продвижения вперед, торможения и рулевого управления, которое инициируется водителем через систему трансмиссии двигателя, тормозную систему, систему рулевого управления и подвески задних и передних колес.
Общая управляемость с точки зрения рулевого управления, продвижения вперед и торможения транспортного средства тесно связана с траекторией движения четырех колес в сборе с шинами. Движения передних колес в сборе с шинами обычно управляются посредством двух независимых подвесок передних колес, тогда как для задних колес в сборе с шинами подвеска задних колес, которая определена выше, управляет двумя задними колесами в сборе с шинами посредством многорычажной подвески, где два устройства подвески, по одному для каждого колеса в сборе с шиной, соединяются друг с другом через поперечную балку со специальными характеристиками, при этом четыре продольных рычага, по два с каждой стороны, соединяют левое и правое устройства подвески с кузовом транспортного средства.
Подвески передних колес и подвеска задних колес вместе с четырьмя колесами в сборе с шинами составляют неподрессоренные массы, соединенные с подрессоренной массой транспортного средства, с которой соединен водитель. Во время движения транспортного средства из объединенного движения вперед (продольное перемещение), вертикального перемещения, бокового перемещения/отклонения, наклона относительно продольной оси, наклона относительно поперечной оси и поворота вокруг вертикальной оси, эти траектории движения и их временные производные во всех направлениях управляются так, что способность обычного водителя к управлению предоставляет возможность полностью контролировать безопасным образом всю синтезированную траекторию движения транспортного средства из способности подвески преобразовывать наложенные полезные управляющие сигналы и действующие помехи, где объективно измеряемые действующие помехи часто превосходят полезный управляющий сигнал, так что шумовой сигнал преобразуется в хорошо определенные воспринимаемые управляющие сигналы для того, чтобы усиливать полезные управляющие сигналы.
Транспортные средства являются сложными системами с людьми в контуре управления. Хотя динамический характер поведения транспортных средств в ответ на входные данные от водителя может быть смоделирован или измерен, это понимание не определяет проблему «хорошего управления», если не дополнено пониманием того, как люди работают в качестве систем управления, и как мозг водителя работает при управлении транспортным средством.
Следовательно, важно обеспечивать механизацию системы с синтезированной работой контура связи, определенного как «отказ в работе, отказ в работе, безотказный», обычно используемый в критичных в отношении безопасности системах, таких как транспортные средства с активной системой управления, CCV. Это требует контура связи четырехкратной избыточности и разнородной системы резервирования, где средой передачи команд в нашем случае является вся архитектура подвески транспортного средства. Избыточность в среде передачи команд здесь должна рассматриваться как потоки информации наложенных слоев спектров мощности, где чувствительная система водителя имеет способность ощущать одновременно происходящие траектории движения способом, аналогичным тому, как наш глаз одновременно может воспринимать несколько цветов, или наши уши одновременно могут воспринимать несколько тонов в музыке. Спектры, как характеризованные различными частотами, должны быть в гармонии друг с другом, т.е. избыточные сигналы должны быть когерентными.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является предоставление улучшенной подвески заднего колеса для моторного транспортного средства. В частности, оно нацелено на подвеску задних колес, имеющую высокую поперечную жесткость. Более точно, целью настоящего изобретения является предоставление подвески задних колес, которая стремится к максимальному сцеплению с дорогой. Еще более точно, целью настоящего изобретения является максимизация однородного тензора энергии-импульса в контакте между колесом в сборе с шиной и дорогой при движении по поверхности дороги. Кроме того, целью настоящего изобретения является предоставление моторного транспортного средства, которое стремится к максимизированному согласующемуся с человеком управлению для нормальных, а также для критических, неожиданных случаев.
Дополнительной целью настоящего изобретения является предоставление подвески задних колес, допускающей управление структурным связыванием взаимодействия шины с дорогой, и управление различными инерционными системами с перекрестными обратными связями, из которых состоит транспортное средство.
Дополнительной целью настоящего изобретения является удовлетворение множества функций, чтобы максимизировать тяговое усилие в каждом конкретном состоянии движения и максимизировать совместимость с возможностями человека, чтобы управлять взаимодействием между водителем, транспортным средством и дорогой на пределе сцепления, когда возвратно-поступательное движение дипольного соединения, как расширенный вид сил Ван-дер-Ваальса, изменяется между структурным межмолекулярным соединением и потерей этого структурного межмолекулярного соединения.
Дополнительной целью настоящего изобретения является удовлетворение множества функций, чтобы максимизировать тяговое усилие в каждом конкретном состоянии движения и максимизировать совместимость с возможностями человека, чтобы управлять взаимодействием между водителем, транспортным средством и дорогой для условий вождения, когда инерция подрессоренного кузова воздействует на контур управления водителя транспортного средства, на которое влияют взаимосвязанные перемещения относительно продольной оси и относительно вертикальной оси.
Эти и дополнительные цели достигаются посредством подвески задних колес, определенной первоначально, которая характеризуется тем, что поперечная балка конфигурируется, чтобы предоставлять возможность изгибания, чтобы обеспечивать отклонение первого и второго устройств подвески в направлении вдоль продольной оси, чтобы регулировать первый и второй, соответственно, угол схождения, и в направлении вдоль вертикальной оси, чтобы регулировать первый и второй, соответственно, угол развала так, что изменения первого и второго углов развала, когда первая и вторая плоскости колеса сходятся к верхней точке выше центра колеса каждого из первого и второго устройств подвески, связаны с управляемой регулировкой первого и второго углов схождения так, что первая и вторая плоскости колеса сходятся непосредственно к задней точке, расположенной позади центра колеса каждого из первого и второго устройств подвески.
Согласно настоящему изобретению каждое из левого и правого заднего колеса в сборе с шиной, каждое из которых соединяется с соответствующей осью колеса и с первым и вторым устройствами подвески, соответственно, соединяется с продольным рычагом подвески и с продольным направляющим рычагом, направляющими каждое устройство подвески по хорошо определенной траектории движения относительно кузова транспортного средства. Два устройства подвески соединяются друг с другом через поперечную балку с конфигурацией, предоставляющей возможность поперечной балке сгибаться, как определено в пункте 1 формулы изобретения.
Поперечная балка согласно настоящему изобретению, таким образом, сконфигурирована, чтобы предоставлять возможность определенного изгибания в определенном направлении. Сгибание поперечной балки будет изменять угол развала, и, как следствие, это изменение также изменяет или регулирует угол схождения задних колес вследствие конфигурации и тому факту, что поперечная балка присоединяется к первому и второму устройствам подвески. Изменение угла развала, таким образом, соединяется или связывается с регулировкой угла схождения. Угол развала может быть отрицательным в статическом состоянии и в нормальном положении расчетной нагрузки. Угол схождения может быть в состоянии положительного схождения в статическом состоянии и в нормальном положении расчетной нагрузки, например, в состоянии положительного схождения 0,05-0,25°, т.е. общее положительное схождение оси 0,3°, или для каждой стороны приблизительно 0,15°.
Регулировка угла схождения может включать в себя уменьшение угла положительного схождения до меньшего угла положительного схождения или, в зависимости от первоначального значения угла схождения, от положительного схождения до отрицательного схождения. Следует отметить, что угол схождения также может быть отрицательным схождением уже в статическом состоянии или в нормальном положении расчетной нагрузки. Также следует отметить, что изменения угла развала и угла схождения, обсужденные выше, допускаются посредством изгибания поперечной балки. Другие события во время вождения также могут иметь в результате дополнительные или накладываемые изменения угла развала и угла схождения.
Следовательно, сложная траектория движения каждого заднего колеса в сборе с шиной и взаимозависящее от них взаимодействие подвески задних колес характеризуется почти постоянной шириной колеи для всех режимов вертикального движения одновременно с объединенным точно управляемым упруго-кинематическим движением синхронизированного отклонения отрицательного схождения и отрицательного развала.
Вследствие заданному изгибанию поперечной балки будет достигаться более равномерное давление контакта между колесом, т.е. шиной, и дорогой во время различных условий вождения. Улучшенное межмолекулярное структурное связывание между шиной и дорогой будет гарантировать высокое тяговое усилие в каждом режиме вождения. В случаях, когда рабочие характеристики моторного транспортного средства, требуемые водителем, не могут поддерживаться посредством структурного связывания, эта потеря тяги будет смягчаться до характера поведения, совместимого со способностями водителя к управлению.
Каждый центр колеса может иметь траекторию движения, характеризуемую углом поворотного рычага на виде сбоку, определенным одновременным движением вверх вдоль вертикальной оси с движением назад вдоль продольной оси. Это совпадает с эффектом небольшого управляемого подруливания оси, с которой каждое из двух колес соединяется, так, что желаемая степень эффекта подруливания шины относительно земли каждого колеса в сборе с шиной обеспечивается посредством кинематики и упругой кинематики, обусловленной топологией рычагов в комбинации с выбором жесткости втулок во всех рычагах и с характеристиками поперечной балки относительно изгибания в развале и схождении, а также в скручивании, в качестве стратегических проектных параметров подвески, способствующих точно управляемому индивидуальному, а также взаимосвязанному, эффекту подруливания каждого из двух колес в сборе с шинами. Известный подход рулевой геометрии Аккермана в передней подвеске, в задней подвеске настоящего изобретения трансформируется в рулевую «инвертированную геометрию» Аккермана за счет использования специальных характеристик поперечной балки, см. фиг. 12.
Согласно варианту осуществления изобретения, первое отношение, между регулировкой первого угла схождения и изменением первого угла развала, и второе отношение, между регулировкой второго угла схождения и изменением второго угла развала, формируют соотношение, которое поддерживается в определенном интервале при вертикальной нагрузке на транспортное средство при движении прямо вперед. Такое соотношение обеспечивает безопасное сцепление с дорогой, когда моторное транспортное средство движется прямо вперед с большой скоростью и во время сильного ускорения и замедления. Кроме того, такое соотношение способствует низкому сопротивлению качения и, таким образом, низкому расходу топлива. Преимущественно, определенный интервал упомянутого соотношения равен 0,01-0,25, предпочтительно, 0,015-0,1, более предпочтительно, 0,015-0,05, а наиболее предпочтительно приблизительно 0,035.
Согласно дополнительному варианту осуществления изобретения, упомянутое изгибание содержит отклонение вдоль продольной оси, чтобы регулировать направления первого угла схождения и второго угла схождения, чтобы поворачивать непосредственно к общей передней точке, расположенной спереди центра колеса, когда транспортное средство движется в повороте. Это изгибание поперечной балки способствует полезному рулению каждого из первого и второго устройств подвески, обеспечивающих упомянутую «инвертированную геометрию Аккермана» для поперечного действия задних колес, которые должны быть синхронизированы по направлению к центру действия, общему для задних колес и передних колес, когда моторное транспортное средство движется в повороте.
Согласно дополнительному варианту осуществления изобретения поперечная балка имеет форму поперечного сечения, определяющую первую основную ось инерции и вторую основную ось инерции, первая основная ось инерции является перпендикулярной ко второй основной оси инерции, и при этом поперечная балка имеет более высокую жесткость на изгиб, или более высокий геометрический момент инерции, для изгибания вокруг второй основной оси инерции, чем для изгибания вокруг первой основной оси инерции. Преимущественно, первая основная ось инерции наклонена вперед, чтобы формировать острый угол по отношению к вертикальной оси. Такая направленная жесткость на изгиб, или направленный геометрический момент инерции, могут достигаться посредством поперечной балки, имеющей более длинную протяженность вдоль первой основной оси инерции, чем вдоль второй основной оси инерции. Поперечная балка может иметь прямоугольное, шестиугольное, овальное или другое подходящее поперечное сечение, также возможно добиваться направленной жесткости на изгиб или направленного геометрического момента инерции посредством других конфигураций балки.
Поперечная балка преимущественно является легкой или относительно легкой. Согласно дополнительному варианту осуществления изобретения это может быть достигнуто посредством полой поперечной балки. Кроме того, поперечная балка может быть прямой или искривленной или иметь любую другую подходящую форму вдоль поперечной оси, предоставляющую возможность вышеописанного определенного изгибания.
Согласно дополнительному варианту осуществления изобретения поперечная балка имеет или определяет линию центра сдвига, которая предусмотрена на расстоянии и за центром колеса. В дополнение к содействию вышеупомянутого изгибания поперечной балки эта конфигурация может также создавать пространство для размещения приводных валов, соединенных с задними колесами. Линия центра сдвига балки протягивается на протяжении всей поперечной балки между корпусами осей колес.
Согласно дополнительному варианту осуществления изобретения продольный рычаг подвески протягивается в направлении продольного рычага подвески, а направляющий рычаг протягивается в направлении направляющего рычага, и при этом направление продольного рычага подвески и направление направляющего рычага сходятся к секущей линии спереди центра колеса, по меньшей мере, когда транспортное средство находится в нормальном положении расчетной нагрузки. Преимущественно, упомянутая секущая линия располагается выше центра колеса.
Было доказано, что конфигурация с рычагами в виде сбоку, где нижние продольные рычаги и верхние направляющие рычаги на каждой стороне оси поперечной балки пересекаются в точке, обеспечивающей угол поворотного рычага на виде сбоку, формирующий односторонний толчок и эффекты подруливания, так что два взаимозависимо взаимодействующих колеса в сборе с шинами на одной и той же оси в любых условиях вождения направляют поперечное тяговое усилие двух шин по направлению к общему центру действия, и подвеска колес обеспечивает более однородную спектральную плотность тяговой мощности по всей площади контакта шины. Когда определенное таким образом максимизированное тяговое усилие с целью поддержания уровня характеристик транспортного средства, который запрашивается посредством действия водителя, находится за пределами возможности структурного связывания, потеря сцепления в поперечном направлении смягчается посредством обусловленных толчками эффектов подруливания за счет использования стохастического вертикального воздействия дороги на поведение, совместимое с возможностями управления водителя.
Согласно дополнительному варианту осуществления изобретения направляющий рычаг протягивается назад от положения крепления направляющего рычага относительно продольной оси, продольный рычаг подвески протягивается вперед от положения крепления продольного рычага относительно продольной оси, и положение крепления направляющего рычага выше положения крепления продольного рычага. Преимущественно, положение крепления направляющего рычага может быть расположено выше центра колеса, а положение крепления продольного рычага располагается ниже центра колеса.
Движение оси вала вращения колеса, определенное топологией подвески, а также деформативностью подвески и специальными характеристиками поперечной балки, все из которых определены посредством локальных проектных параметров в системе координат транспортного средства, имеет очень правильное и точно определенное действие, которое должно быть направлено к общему центру действия, которое требует, чтобы эффект подруливания движущегося в повороте внутреннего и движущегося в повороте внешнего колеса в сборе с шиной имел эффекты подруливания, как видно в фиксированной системе координат кузова. Этот результат достигается из объединения вертикального воздействия и топологии рычагов и кинематики, обеспечивающей задуманные эффекты подруливания в комбинации с коэффициентом сопротивления шины боковому уводу, и упругой кинематики, обеспечивающей эффекты подруливания из местоположения линии центра сдвига поперечной балки далеко позади центра колеса. Выбор топологии, кинематики и упругой кинематики таков, что эти накладываемые движения будут совпадать, так что контакт шины с дорогой будет максимизировать однородное распределение нагрузок так, чтобы максимизировать структурное связывание и силу сцепления шины с дорогой. Кроме того, топология предоставляет возможность учета требований по синхронизации изменения развала и схождения от упругой кинематики в результате специальных характеристик поперечной балки. В любой момент времени транспортное средство с боковым ускорением следует пути, определенному мгновенным центром дуги в фиксированной системе координат. Радиус этой дуги может изменяться, но в любой момент путь является конкретной дугой. Шины транспортного средства с возможностью сцепления от структурного связывания в течение микросекунд требуют синхронизации силы сцепления двух шин, так что мгновенные действия движения всех различных элементов подвески будут совпадать для пользы максимизированного структурного связывания на протяжении всего пятна контакта шины в течение чрезвычайно короткого периода продолжительности сил Ван-дер-Ваальса с общим направлением, синхронизированным к мгновенному центру поворота транспортного средства в фиксированной системе координат дороги. Точно определенная рычажная топология, дополненная местоположением и упругими характеристиками поперечной балки, обеспечивает адаптацию ко всем различным уровням поперечного ускорения и путям дуг так, что внутреннее колесо и внешнее колесо заставляют функции движения сходиться непосредственно к центру поворота транспортного средства, который определен в фиксированной системе координат дороги.
Согласно дополнительному варианту осуществления изобретения каждое из первого и второго устройств подвески содержит заднюю пружину транспортного средства для переноса части веса кузова транспортного средства и крепление пружины транспортного средства, сконфигурированное для поддержки задней пружины транспортного средства, и при этом крепление пружины транспортного средства предоставляется позади центра колеса. Преимущественно, крепления пружин транспортного средства могут быть предоставлены на поперечной балке поблизости от первого устройства подвески и второго устройства подвески, соответственно.
Согласно дополнительному варианту осуществления изобретения подвеска заднего колеса содержит поперечную рычажную структуру для амортизации поперечных сил, действующих на кузов транспортного средства и на задние колеса. Поперечная рычажная структура может содержать одно из тяги Панара, тяги Скотта-Расселла или тяги Уатта.
Следует отметить, что подвеска колес согласно изобретению подходит для транспортных средств с ведомой или ведущей задней осью. Рычаги могут соединяться с упрощенной рамной структурой, которая соединяется с кузовом транспортного средства. Этот подход дает возможность производителю транспортных средств использовать идентичные конфигурации кузова и оборудование для сборки на производственной линии, где 5-рычажная подвеска, относящаяся к патентной заявке WO 2008/05034, используется для транспортных средств, имеющих переднее расположение двигателя транспортного средства с ведомой или ведущей задней осью.
Цели, обсужденные выше, также достигаются посредством моторного устройства согласно пункту 15 формулы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение теперь должно быть объяснено более подробно посредством описания различных вариантов осуществления, приведенных только в качестве примера, и со ссылкой на чертежи, присоединенные к ним.
Фиг. 1 показывает схематично перспективный вид моторного транспортного средства, указывающего шесть степеней свободы транспортного средства.
Фиг. 2 показывает схематично вид сверху моторного транспортного средства, имеющего подвеску задних колес согласно изобретению.
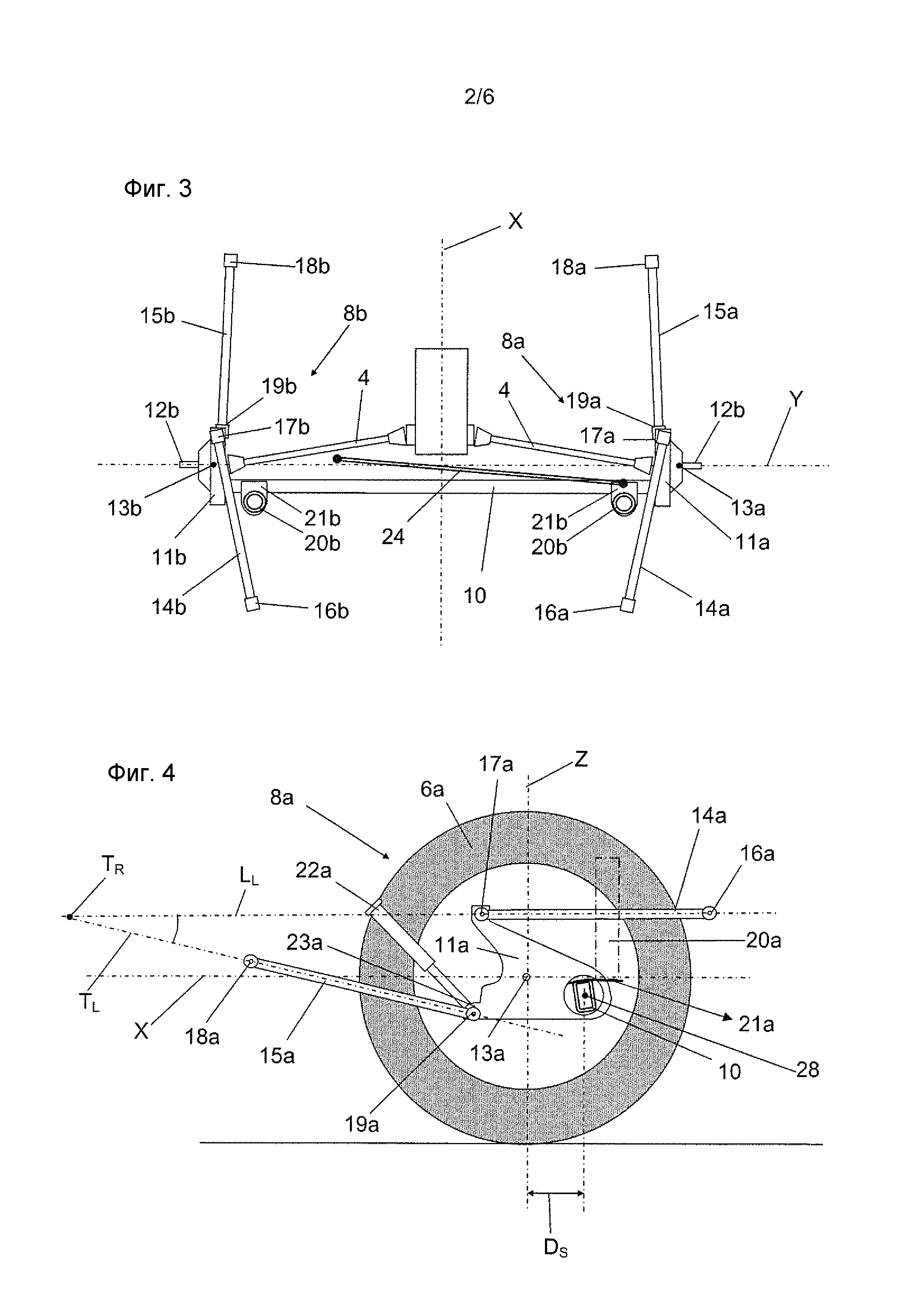
Фиг. 3 показывает схематично вид сверху задней подвески согласно изобретению.
Фиг. 4 показывает схематично вид сбоку устройства подвески для задней подвески на Фиг. 3.
Фиг. 5 показывает схематично вид сзади частей задней подвески на Фиг. 3, указывая угол развала и изменение угла развала.
Фиг. 6 показывает схематично вид сверху частей задней подвески на Фиг. 3, указывая угол схождения и изменение угла схождения.
Фиг. 7 показывает схематично вид в разрезе через первый вариант поперечной балки задней подвески на Фиг. 3.
Фиг. 8 показывает схематично вид в разрезе через второй вариант поперечной балки задней подвески на Фиг. 3.
Фиг. 9 показывает схематично вид в разрезе через третий вариант поперечной балки задней подвески на Фиг. 3.
Фиг. 10 показывает схематично вид сверху задней подвески, имеющей альтернативную поперечную рычажную структуру.
Фиг. 11 показывает схематично вид сверху задней подвески, имеющей другую альтернативную поперечную рычажную структуру.
Фиг. 12 показывает вид сверху моторного транспортного средства, имеющего устройство задней подвески и движущегося через поворот.
ПОДРОБНОЕ ОПИСАНИЕ РАЗЛИЧНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Фиг. 1 раскрывает динамику моторного транспортного средства в шести степенях свободы, обозначенных следующим образом:
Движение вверх и вниз = вертикальные перемещения;
Движение влево и вправо = боковое перемещение;
Движение вперед и назад = продольное перемещение;
Угловое изменение вокруг горизонтальной поперечной оси Y = наклон относительно поперечной оси;
Угловое изменение вокруг вертикальной оси Z = поворот вокруг вертикальной оси; и
Угловое изменение вокруг горизонтальной продольной оси X = наклон относительно продольной оси.
Фиг. 2 раскрывает моторное транспортное средство, содержащее кузов 1 транспортного средства и систему 2 двигатель-трансмиссия, содержащую двигатель 3 и трансмиссию, содержащую множество различных приводных валов 4. Двигатель 3 в раскрытом варианте осуществления предусмотрен в передней части моторного транспортного средства. Моторное транспортное средство имеет две подвески колес, одну подвеску передних колес для передних колес 5a, 5b и одну подвеску задних колес для задних колес 6a, 6b. Приводные валы 4 соединяют трансмиссию 3 с колесами 5a, 5b, 6a, 6b с различными конфигурациями привода, такими как передний, задний или привод на все колеса моторного транспортного средства. Подвеска передних колес содержит первое устройство 7a подвески для подвешивания правого переднего колеса 5a и второе устройство 7b подвески для подвешивания левого переднего колеса 5b. Подвеска задних колес содержит первое устройство 8a подвески для подвешивания правого заднего колеса 6a и второе устройство 8b подвески для подвешивания левого заднего колеса 6b.
Подвеска задних колес теперь будет объяснена более подробно со ссылкой на Фиг. 3-9. Подвеска задних колес определяет продольную ось X, которая параллельна с нормальным направлением движения вперед моторного транспортного средства. Подвеска задних колес также определяет вертикальную ось Z, которая перпендикулярна продольной оси X и является вертикальной, когда моторное транспортное средство находится в нормальном состоянии движения. Наконец, подвеска задних колес определяет поперечную ось Y, которая перпендикулярна продольной оси X и вертикальной оси Z.
Первое устройство 8a подвески задней подвески сконфигурировано, чтобы нести правое заднее колесо в сборе с шиной, содержащее правое заднее колесо 6a, вращающееся в первой плоскости колеса, формирующей первый угол d схождения, см. Фиг. 6, относительно продольной оси X и первый угол γ развала, см. Фиг. 5, относительно вертикальной оси Z. Второе устройство 8b подвески задней подвески сконфигурировано, чтобы нести левое заднее колесо в сборе с шиной, содержащее левое заднее колесо 6b, вращающееся во второй плоскости колеса, формирующей второй угол d схождения, см. Фиг. 6, относительно продольной оси X и второй угол g развала, см. Фиг. 5, относительно вертикальной оси Z.
Задняя подвеска также содержит поперечную балку 10, соединяющую первое устройство 8a подвески и второе устройство 8b подвески и протягивающуюся вдоль поперечной оси Y.
Каждое из первого и второго устройств 8a, 8b подвески содержит корпус 11a, 11b оси колеса, прикрепленный к соответствующему концу поперечной балки 10. Корпус 11a, 11b оси колеса поддерживает ось 12a, 12b колеса, на которой должно быть установлено заднее колесо 6a, 6b. Корпус 11a, 11b оси колеса определяет центр 13a, 13b колеса.
Каждое из первого и второго устройств 8a, 8b подвески также содержит направляющий рычаг 14a, 14b и продольный рычаг 15a, 15b. Направляющий рычаг 14a, 14b соединяется или прикрепляется к кузову 1 транспортного средства или к подрамнику, в положении 16a, 16b крепления направляющего рычага к кузову посредством подходящего соединения, и к корпусу 11a, 11b оси в положении 17a, 17b крепления направляющего рычага посредством подходящего соединения. Продольный рычаг 15a, 15b соединяется или прикрепляется к кузову 1 транспортного средства, или к подрамнику, в положении 18a, 18b крепления продольного рычага к кузову посредством подходящего соединения и к корпусу 11a, 11b оси и/или к кронштейну (не раскрыт на чертежах) на поперечной балке 10 в положении 19a, 19b крепления продольного рычага посредством подходящего соединения.
Направляющий рычаг 14a, 14b протягивается назад от положения 17a, 17b крепления направляющего рычага относительно продольной оси X вдоль направления LL направляющего рычага. Продольный рычаг 15a, 15b протягивается вперед от положения 19a, 19b крепления продольного рычага относительно продольной оси X вдоль направления TL продольного рычага. Как может быть видно на Фиг. 4, направление TL продольного рычага и направление LL направляющего рычага сходятся по направлению к секущей линии TR впереди центра 13a, 13b колеса, по меньшей мере, когда транспортное средство находится в статическом состоянии или нормальном положении расчетной нагрузки. Секущая линия TR располагается выше центра 13a, 13b колеса.
Положение 17a, 17b крепления направляющего рычага находится выше положения 19a, 19b крепления продольного рычага, как может быть видно на Фиг. 4. Положение 17a, 17b крепления направляющего рычага также располагается выше центра 13a, 13b колеса, тогда как положение 19a, 19b крепления продольного рычага располагается ниже центра 13a, 13b колеса.
Каждое из первого и второго устройств 8a, 8b подвески содержит заднюю пружину 20a, 20b транспортного средства для переноса части веса кузова 1 транспортного средства. Пружина 20a, 20b транспортного средства поддерживается или предусмотрена на креплении 21a, 21b пружины транспортного средства. Крепление 21a, 21b пружины транспортного средства предусмотрено позади центра 13a, 13b колеса. Кроме того, в раскрытых вариантах осуществления крепление 21a, 21b пружины транспортного средства предусмотрено на поперечной балке 10.
Каждое из первого и второго устройств 8a, 8b подвески также содержит задний амортизатор 22a, только один из которых раскрыт. Амортизатор 22a, в раскрытых вариантах осуществления, прикрепляется к корпусу 11a, 11b оси колеса в положении 23a крепления амортизатора посредством любого подходящего соединения.
Подвеска задних колес также содержит поперечную рычажную структуру 24 для передачи поперечных сил, действующих между кузовом 1 транспортного средства и подвеской задних колес, соединенной с задними колесами 6a, 6b. В варианте осуществления, раскрытом на Фиг. 3, поперечная рычажная структура 24 содержит так называемую тягу Панара, соединяющую подвеску задних колес с кузовом 1 транспортного средства или с подрамником. Фиг. 10 иллюстрирует другую поперечную рычажную структуру 24, содержащую так называемую тягу Скотта-Рассела, имеющую тягу, прикрепленную к корпусу 11a оси правого колеса и к кузову 1 транспортного средства или подрамнику для заднего дифференциала трансмиссии системы 2 двигатель-трансмиссия. Фиг. 11 иллюстрирует дополнительную альтернативу поперечной рычажной структуры 24, содержащей так называемую тягу Уатта, имеющую поворотный рычаг, прикрепленный к кузову 1 транспортного средства или подрамнику. Первый рычаг прикрепляется к одному концу поворотного рычага и корпусу 11a оси правого колеса. Второй рычаг прикрепляется к другому концу поворотного рычага и к корпусу 11b оси левого колеса.
Поперечная балка 10 устойчиво и неподвижно прикрепляется к корпусам 11a, 11b осей колес первого и второго устройств 8a, 8b подвески. Поперечная балка 10, см. Фиг. 7-9, имеет форму поперечного сечения, определяющую первую основную ось инерции A1 и вторую основную ось инерции A2. Первая основная ось инерции A1 перпендикулярна ко второй основной оси инерции A2. Поперечная балка 10 имеет более высокую жесткость на изгиб или более высокий геометрический момент инерции для изгибания вокруг второй основной оси инерции A2, чем для изгибания вокруг первой основной оси инерции A1. Как иллюстрировано на Фиг. 7-9, первая основная ось инерции A1 наклонена вперед, чтобы формировать острый угол a по отношению к вертикальной оси Z. Острый угол α больше нуля и меньше 20°, предпочтительно меньше 15°, а более предпочтительно, меньше 10°.
В раскрытых вариантах осуществления поперечная балка 10 является полой или трубчатой. Такая конфигурация дает в результате низкий вес поперечной балки 10. Вариант поперечной балки 10, показанный на Фиг. 7, имеет прямоугольную форму поперечного сечения. Вариант поперечной балки 10, показанный на Фиг. 8, имеет шестиугольную форму поперечного сечения, а вариант на Фиг. 9 имеет эллиптическую или овальную форму. Следует отметить, что также возможны другие формы поперечного сечения для удовлетворения требования более высокой жесткости на изгиб, или более высокого геометрического момента инерции, для изгибания вокруг второй основной оси инерции A2, чем для изгибания вокруг первой основной оси инерции A1. Форма поперечного сечения или размерность поперечной балки 10 может также изменяться вдоль поперечной оси Y. Кроме того, в раскрытых вариантах осуществления поперечная балка 10 является прямой или в значительной степени прямой на своем протяжении вдоль поперечной оси Y. Однако поперечная балка 10 может иметь другую форму вдоль поперечной оси Y, например, поперечная балка 10 может быть искривлена или слегка искривлена. Поперечная балка 10 имеет или определяет линию 28 центра сдвига балки по всей протяженности между корпусами 11a, 11b осей колес. Линия 28 центра сдвига поперечной балки предусмотрена на расстоянии Ds от и позади центра 13a, 13b колеса на всем протяжении поперечной балки 10, см. Фиг. 4.
Поперечная балка 10 конфигурируется, чтобы предоставлять возможность изгибания поперечной балки 10 по действием вертикальных нагрузок, чтобы обеспечивать отклонение первого устройства 8a подвески и второго устройства 8b подвески в направлении вдоль продольной оси X, чтобы регулировать первый и второй, соответственно, угол δ схождения, и в направлении вдоль вертикальной оси Z, чтобы регулировать первый и второй, соответственно, угол γ развала. Отклонение корпусов 11a, 11b осей колес становится таким, что изменения Δγ первого и второго углов γ развала, когда плоскости первого и второго колеса сходятся к верхней точке выше центра 13a, 13b колеса каждого из первого и второго устройств 8a, 8b подвески, связаны для регулировки, или управляемой регулировки, Δδ первого и второго углов δ схождения, так что плоскости первого и второго колеса сходятся непосредственно к задней точке, расположенной сзади центра 13a, 13b колеса каждого из первого и второго устройств 8a, 8b подвески.
Поперечная балка 10 будет, таким образом, предоставлять возможность определенного изгибания в определенном направлении. Сгибание будет изменять угол γ развала и, как следствие этого изменения, также регулировать угол δ схождения задних колес 6a, 6b вследствие конфигурации поперечной балки 10 и тому факту, что поперечная балка 10 прикрепляется к первому и второму устройствам 8a, 8b подвески. Изменение Δγ угла γ развала, таким образом, связывается с управляемым регулированием Δδ угла δ схождения. Как иллюстрировано на Фиг. 5, угол γ развала является отрицательным в статическом состоянии и в нормальном положении расчетной нагрузки. Угол δ схождения находится в состоянии положительного схождения в статическом состоянии, например, в состоянии положительного схождения 0,05-0,25°, т.е. общее положительное схождение оси 0,3°, или для каждой стороны приблизительно 0,15°.
Существует первое отношение между регулировкой Δδ первого угла δ схождения и изменением Δγ первого угла γ развала и второе отношение между регулировкой Δδ второго угла δ схождения и изменением Δγ второго угла γ развала. Каждое из первого и второго отношений формирует соотношение Δδ/Δγ, которое поддерживается в определенном интервале при вертикальной нагрузке на транспортное средство при движении прямо вперед. Определенный интервал соотношения Δδ/Δγ равен 0,01-0,25, предпочтительно, 0,015-0,1, более предпочтительно, 0,015-0,05, а наиболее предпочтительно, приблизительно 0,035.
Со ссылкой на Фиг. 6 и 12, может быть видно, что изгибание поперечной балки 10 также содержит отклонение вдоль продольной оси X, чтобы регулировать направления первого угла δ схождения и второго угла δ схождения, чтобы поворачиваться непосредственно к общей передней точке, расположенной спереди центра 13a, 13b колеса, когда транспортное средство движется через поворот. В примере, раскрытом на Фиг. 12, моторное транспортное средство поворачивает налево. Левое заднее колесо 6b будет находиться в состоянии положительного схождения, а правое заднее колесо 6a будет находиться в состоянии отрицательного схождения. Абсолютное значение угла положительного схождения левого заднего колеса 6b больше абсолютного значения угла правого заднего колеса 6a. Таким образом, будет общее положительное схождение оси для задних колес 6a, 6b. Этот эффект достигается вследствие конфигурации подвески задних колес и, в частности, конфигурации поперечной балки 10, которая, будучи устойчиво или неподвижно прикрепленной к корпусам 11a, 11b осей колес, предоставляет возможность этого изгибания, когда поперечные силы действуют на задние колеса 6a, 6b во время движения через поворот. Вследствие взаимного общего отрицательного схождения оси для передних колес 5a, 5b, поперечное действие задних колес 6a, 6b будет синхронизировано по направлению к центру действия CA, или мгновенному центру действия или мгновенному центру поворота, общему для задних колес 6a, 6b и передних колес 5a, 5b, когда моторное транспортное средство движется через поворот, таким образом, обеспечивая вышеупомянутую «инвертированную геометрию Аккермана», как иллюстрировано на Фиг. 12.
Настоящее изобретение не ограничивается раскрытыми вариантами осуществления, но может быть изменено и модифицировано в рамках последующей формулы изобретения.
Реферат
Группа изобретений относится к подвеске задних колес моторного транспортного средства. Подвеска задних колес определяет продольную ось (X), сконфигурированную так, чтобы быть параллельной с нормальным направлением движения вперед моторного транспортного средства, вертикальную ось (Z), перпендикулярную продольной оси (X) и сконфигурированную, чтобы быть вертикальной, когда моторное транспортное средство находится в нормальном состоянии движения, и поперечную ось (Y), перпендикулярную продольной оси (X) и вертикальной оси (Z). Подвеска задних колес содержит первое устройство (8a) подвески, второе устройство (8b) подвески и поперечную балку (10), соединяющую и прикрепленную к первому устройству (8a) подвески и второму устройству (8b) подвески и проходящую вдоль поперечной оси (Y). Каждое из первого и второго устройств (8a, 8b) подвески содержит корпус (11a, 11b) оси колеса, направляющий рычаг (14a, 14b) и продольный рычаг (15a, 15b). Достигается создание подвески задних колес, имеющей высокую поперечную жесткость, и которая стремится к максимальному сцеплению с дорогой. 2 н. и 13 з.п. ф-лы, 12 ил.
Комментарии