Активная система подвески транспортного средства (варианты) - RU2412068C2
Код документа: RU2412068C2
Чертежи

Описание
Активные системы подвески транспортных средств обычно включают в себя управляемый элемент подвески, такой как привод с изменяемым усилием. Управляемый элемент подвески обычно соединяют между колесным узлом и шасси транспортного средства при помощи промежуточной опоры.
Согласно первому объекту настоящего изобретения создана активная система подвески для транспортного средства, содержащая активный элемент подвески, который, по существу, жестко прикреплен к раме транспортного средства для того, чтобы, по существу, исключить механическую связь движения якоря активного элемента подвески с боковым перемещением колеса транспортного средства, и тягу управления, которая прикреплена между якорем активного элемента подвески и колесом транспортного средства, причем первый конец тяги управления прикреплен к якорю активного элемента подвески с помощью шарового шарнира или втулки.
Предпочтительно, по существу, исключена механическая связь активного элемента подвески с тягой подвески транспортного средства.
Предпочтительно, по существу, исключена механическая связь активного элемента подвески с рулевым приводом транспортного средства.
Предпочтительно, боковое перемещение содержит, по меньшей мере, одно из продольного и поперечного движений.
Предпочтительно, система дополнительно содержит пассивный элемент подвески, который выполнен с возможностью удерживания части массы транспортного средства.
Предпочтительно, расстояние между активным элементом подвески и шиной транспортного средства составляет, по меньшей мере, два сантиметра.
Согласно второму объекту настоящего изобретения создан способ активной подвески шасси транспортного средства, при котором прикрепляют активный элемент подвески к раме транспортного средства, для того чтобы, по существу, исключить связь движения якоря активного элемента подвески с боковым перемещением колеса транспортного средства, и прикрепляют тягу управления между якорем активного элемента подвески и колесом транспортного средства, причем первый конец тяги управления прикрепляют к якорю активного элемента подвески с помощью шарового шарнира или втулки.
Предпочтительно, дополнительно прикрепляют пассивный элемент подвески к раме транспортного средства.
Предпочтительно, по существу, исключают механическую связь активного элемента подвески с тягой подвески транспортного средства.
Предпочтительно, по существу, исключают механическую связь массы активного элемента подвески с рулевым приводом транспортного средства.
Предпочтительно, боковое перемещение содержит, по меньшей мере, одно из продольного и поперечного движений.
Согласно третьему объекту настоящего изобретения создана активная система подвески для транспортного средства, содержащая линейный электромагнитный привод, содержащий статор и якорь, который выполнен с возможностью перемещения относительно статора, причем статор, по существу, жестко прикреплен к раме транспортного средства, и тягу управления, имеющую первый конец, прикрепленный к якорю, и имеющую второй конец, прикрепленный к колесу транспортного средства таким образом, что движение якоря вызывает движение колеса транспортного средства относительно рамы транспортного средства, при этом первый конец тяги управления прикреплен к якорю активного элемента подвески с помощью шарового шарнира или втулки.
Предпочтительно, система дополнительно содержит пассивный элемент подвески, соединенный между рамой транспортного средства и колесом транспортного средства.
Предпочтительно, пассивный элемент подвески выбран из группы, содержащей пружину и амортизатор.
Предпочтительно, линейный электромагнитный привод содержит электромагнитный привод с подвижным магнитом.
Предпочтительно, система дополнительно содержит пассивный элемент подвески, соединенный между шасси транспортного средства и колесом транспортного средства.
Предпочтительно, статор прикреплен к раме транспортного средства при помощи втулки.
Предпочтительно, движение якоря вызывает движение колеса транспортного средства, по существу, в вертикальном направлении относительно горизонтальной плоскости транспортного средства.
Предпочтительно, отношение перемещения якоря к перемещению колеса составляет, по существу, один к одному.
Предпочтительно, отношение перемещения якоря к перемещению колеса составляет меньше одного к одному.
Предпочтительно, система дополнительно содержит датчик, прикрепленный к одному из линейного электромагнитного привода, рамы и колеса.
Предпочтительно, датчик интегрирован в линейный электромагнитный привод.
Предпочтительно, тяга управления содержит изогнутую часть.
Предпочтительно, по существу, исключена механическая связь движения якоря с движением колеса.
Предпочтительно, система дополнительно содержит покрытие, которое, по существу, изолирует якорь.
Предпочтительно, система дополнительно содержит гофр, который окружает, по меньшей мере, часть тяги управления.
Предпочтительно, по существу, исключена механическая связь линейного электромагнитного привода с рулевым приводом транспортного средства.
Согласно четвертому объекту изобретения создан способ активной подвески шасси транспортного средства, при котором: прикрепляют статор линейного электромагнитного привода к раме транспортного средства, при этом шасси транспортного средства прикреплено к раме; прикрепляют первый конец тяги управления к якорю линейного электромагнитного привода, причем якорь выполнен подвижным относительно статора; и прикрепляют второй конец тяги управления к колесу транспортного средства таким образом, что движение якоря вызывает движение колеса транспортного средства относительно рамы транспортного средства.
Предпочтительно, дополнительно прикрепляют пассивный элемент подвески между рамой транспортного средства и колесом транспортного средства.
Предпочтительно, пассивный элемент подвески выбирают из группы, содержащей пружину и амортизатор.
Предпочтительно, линейный электромагнитный привод содержит электромагнитный привод с подвижным магнитом.
Предпочтительно, дополнительно прикрепляют пассивный элемент подвески между шасси транспортного средства и колесом транспортного средства.
Предпочтительно, дополнительно прикрепляют статор к раме транспортного средства при помощи втулки.
Предпочтительно, дополнительно соединяют шаровой шарнир первого конца тяги управления с якорем.
Предпочтительно, дополнительно прикрепляют первый конец тяги управления к якорю при помощи втулки.
Предпочтительно, движение якоря вызывает движение колеса транспортного средства, по существу, в вертикальном направлении относительно горизонтальной плоскости транспортного средства.
Согласно пятому объекту изобретения создан линейный электромагнитный привод для активной системы подвески транспортного средства, содержащий статор; якорь, имеющий магнитную связь со статором; первую опорную систему, механически соединенную с якорем, причем первая опорная система поддерживает воздушный зазор между якорем и статором; и вторую опорную систему, механически соединенную со статором, причем вторая опорная система поглощает изгибающие нагрузки, относящиеся к подвеске, тем самым минимизируя изгибающие нагрузки на якорь, относящиеся к подвеске, каретку, механически соединенную с первой опорной системой таким образом, что каретка перемещается относительно первой опоры.
Предпочтительно, статор содержит, по меньшей мере, одну катушку.
Предпочтительно, якорь содержит, по меньшей мере, один магнит.
Предпочтительно, первая опорная система удерживает магнитную нагрузку от взаимодействия якоря и статора.
Предпочтительно, первая опорная система механически связана со второй опорной системой при помощи одного из пальца и изогнутого элемента.
Предпочтительно, привод дополнительно содержит каретку, которая механически связана со второй опорной системой.
Предпочтительно, каретка механически связана с первой опорной системой при помощи пальца или изогнутого элемента.
Предпочтительно, палец или изогнутый элемент обеспечивают перемещение каретки относительно первой опорной системы.
Предпочтительно, каретка механически связана с колесом транспортного средства при помощи тяги управления.
Предпочтительно, один конец тяги управления соединен с кареткой при помощи одного из шарового шарнира и втулки.
Согласно шестому объекту изобретения создан линейный электромагнитный привод для активной системы подвески транспортного средства, содержащий: статор; якорь, имеющий магнитную связь со статором, причем якорь выполнен подвижным относительно статора; корпус, окружающий статор и якорь, причем огибающая корпуса остается зафиксированной независимо от положения якоря относительно статора; тягу управления, имеющую первый конец, прикрепленный к якорю, и имеющую второй конец, прикрепленный к колесу транспортного средства таким образом, что движение якоря вызывает движение колеса транспортного средства относительно рамы транспортного средства.
Предпочтительно, корпус, по существу, жестко прикреплен к раме транспортного средства.
Предпочтительно, огибающая корпуса имеет размеры корпуса.
Предпочтительно, якорь механически связан со статором при помощи опоры.
Согласно седьмому объекту изобретения создана активная система подвески для транспортного средства, содержащая: линейный электромагнитный привод, содержащий статор и якорь, который выполнен с возможностью перемещения относительно статора, причем статор, по существу, жестко прикреплен к раме транспортного средства, и контроллер, имеющий электрическую связь с линейным электромагнитным приводом посредством одного или более неизгибающихся кабелей.
Предпочтительно, один или более неизгибающихся кабелей содержит, по меньшей мере, один из сигнального кабеля и силового кабеля.
Предпочтительно, линейный электромагнитный привод дополнительно содержит усилитель, имеющий электрическую связь с контроллером.
Предпочтительно, статор прикреплен к раме транспортного средства при помощи втулки.
Предпочтительно, система дополнительно содержит тягу управления, имеющую первый конец, прикрепленный к якорю, и имеющую второй конец, прикрепленный к колесу транспортного средства таким образом, что движение якоря вызывает движение колеса транспортного средства относительно рамы транспортного средства.
Согласно восьмому объекту изобретения создан электромагнитный привод для активной системы подвески транспортного средства, содержащий: статор; якорь, имеющий магнитную связь со статором, причем якорь выполнен подвижным относительно статора; корпус, окружающий статор и якорь; и первый механический стопор, расположенный в корпусе, причем имеет место относительное перемещение между якорем и стопором, когда якорь движется, при этом стопор ограничивает перемещение якоря в первом направлении.
Предпочтительно, привод дополнительно включает второй механический стопор, расположенный в корпусе, причем имеет место относительное перемещение между якорем и вторым стопором, когда якорь движется, при этом второй стопор ограничивает перемещение якоря во втором направлении, противоположном первому направлению.
Предпочтительно, привод дополнительно включает третий механический стопор, расположенный в корпусе, причем имеет место относительное перемещение между якорем и третьим стопором, когда якорь движется, при этом третий стопор ограничивает перемещение якоря во втором направлении.
Предпочтительно, стопор имеет круглое сечение.
Предпочтительно, стопор имеет канавку.
Предпочтительно, привод дополнительно включает опорную направляющую, которая направляет движение якоря, при этом стопор охватывает опорную направляющую.
Предпочтительно, стопор включает неопрен.
Предпочтительно, стопор включает этиленпропилендиеновый мономер.
Согласно девятому объекту изобретения создан электромагнитный привод для активной системы подвески транспортного средства, содержащий: статор; якорь, имеющий магнитную связь со статором, причем якорь выполнен подвижным относительно статора; корпус, окружающий статор и якорь; и механический стопор, расположенный в корпусе, причем механический стопор выполнен из материала, включающего полимерный эластомер.
Предпочтительно, эластомер представляет собой термореактивный полимерный эластомер.
Предпочтительно, термореактивный полимерный эластомер включает материал, выбранный из группы, состоящей из этиленпропилендиенового мономера, неопрена, нитрилового каучука, полиуретана, кремнийорганического каучука, натурального каучука, стиролбутадиенового каучука и фторуглеродов.
Предпочтительно, эластомер представляет собой термопластический полимерный эластомер.
Предпочтительно, термопластический полимерный эластомер включает динамически вулканизированный эластомер.
Предпочтительно, полимерный эластомер имеет форму, выбранную из группы, состоящей из плотной пены или ячеистой пены.
Согласно десятому объекту изобретения создан электромагнитный привод для активной системы подвески транспортного средства, содержащий: статор; якорь, имеющий магнитную связь со статором, причем якорь выполнен подвижным относительно статора; корпус, окружающий статор и якорь; и механический стопор, расположенный в корпусе, причем механический стопор имеет толщину от 10 мм до 60 мм.
Предпочтительно, механический стопор имеет толщину от 20 мм до 50 мм.
Предпочтительно, механический стопор имеет толщину от 30 мм до 40 мм.
Предпочтительно, механический стопор имеет толщину 35 мм.
Согласно одиннадцатому объекту изобретения создан электромагнитный привод для активной системы подвески транспортного средства, содержащий: статор; якорь, имеющий магнитную связь со статором, причем якорь выполнен подвижным относительно статора; первую опорную направляющую, которая направляет движение якоря; и первую опору для удерживания первого конца опорной направляющей, причем опора обеспечивает перемещение первого конца опорной направляющей из первого исходного положения, когда к опорной направляющей прилагается первая сила, и опора возвращает первый конец опорной направляющей в исходное положение, когда прекращается приложение силы к первой опорной направляющей.
Предпочтительно, привод дополнительно включает в себя вторую опору для удерживания второго конца опорной направляющей, причем вторая опора обеспечивает перемещение второго конца опорной направляющей из второго исходного положения, когда к опорной направляющей прилагается сила, и вторая опора возвращает второй конец опорной направляющей во второе исходное положение, когда прекращается приложение силы к первой опорной направляющей.
Предпочтительно, привод дополнительно содержит: вторую опорную направляющую, которая направляет движение якоря; и третью опору для удерживания первого конца второй опорной направляющей, причем третья опора обеспечивает перемещение первого конца второй опорной направляющей из третьего исходного положения, когда ко второй опорной направляющей прилагается вторая сила, и третья опора возвращает первый конец второй опорной направляющей в третье исходное положение, когда прекращается приложение второй силы ко второй опорной направляющей.
Предпочтительно, привод дополнительно включает в себя четвертую опору для удерживания второго конца второй опорной направляющей, причем четвертая опора обеспечивает перемещение второго конца второй опорной направляющей из четвертого исходного положения, когда ко второй опорной направляющей прилагается вторая сила, и четвертая опора возвращает второй конец второй опорной направляющей в четвертое исходное положение, когда прекращается приложение силы ко второй опорной направляющей.
Предпочтительно, опора включает в себя механический стопор, который ограничивает движение якоря.
Настоящее изобретение описано более детально в подробном описании изобретения. Указанные выше и дополнительные преимущества настоящего изобретения могут быть лучше поняты при ознакомлении с нижеследующим описанием, приведенным со ссылкой на прилагаемые чертежи, на которых одинаковые ссылочные позиции обозначают одинаковые элементы конструкции и признаки на разных чертежах. Чертежи необязательно выполнены в масштабе, и особое значение вместо этого придано иллюстрации принципов изобретения. На чертежах:
фиг.1 - схема обычной активной системы подвески для одного колеса транспортного средства;
фиг.2 - вид активной системы подвески для одного колесного узла транспортного средства, соответствующей одному варианту осуществления изобретения;
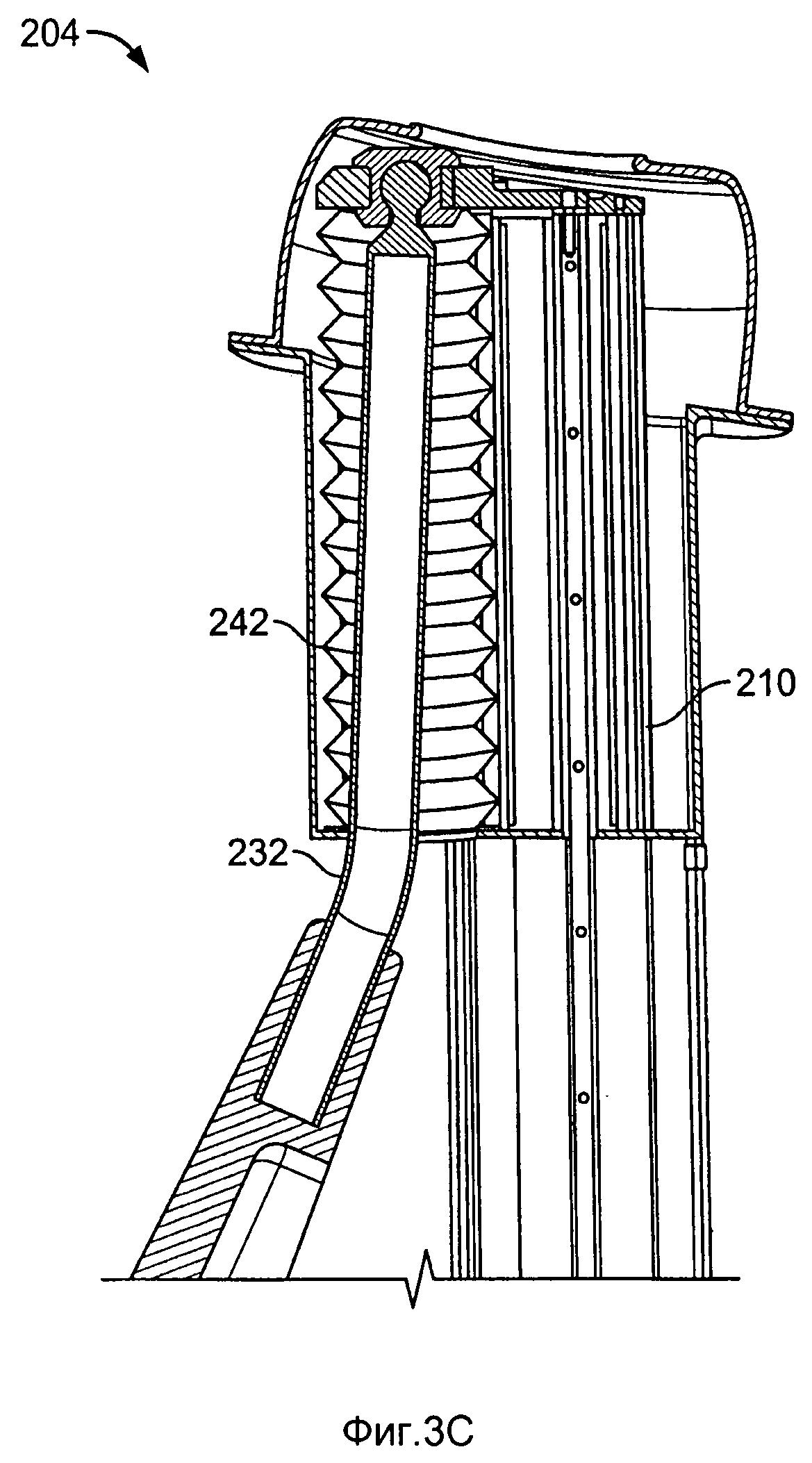
фиг.3А-3С - иллюстрации перемещения тяги управления относительно активного элемента подвески, соответствующего настоящему изобретению;
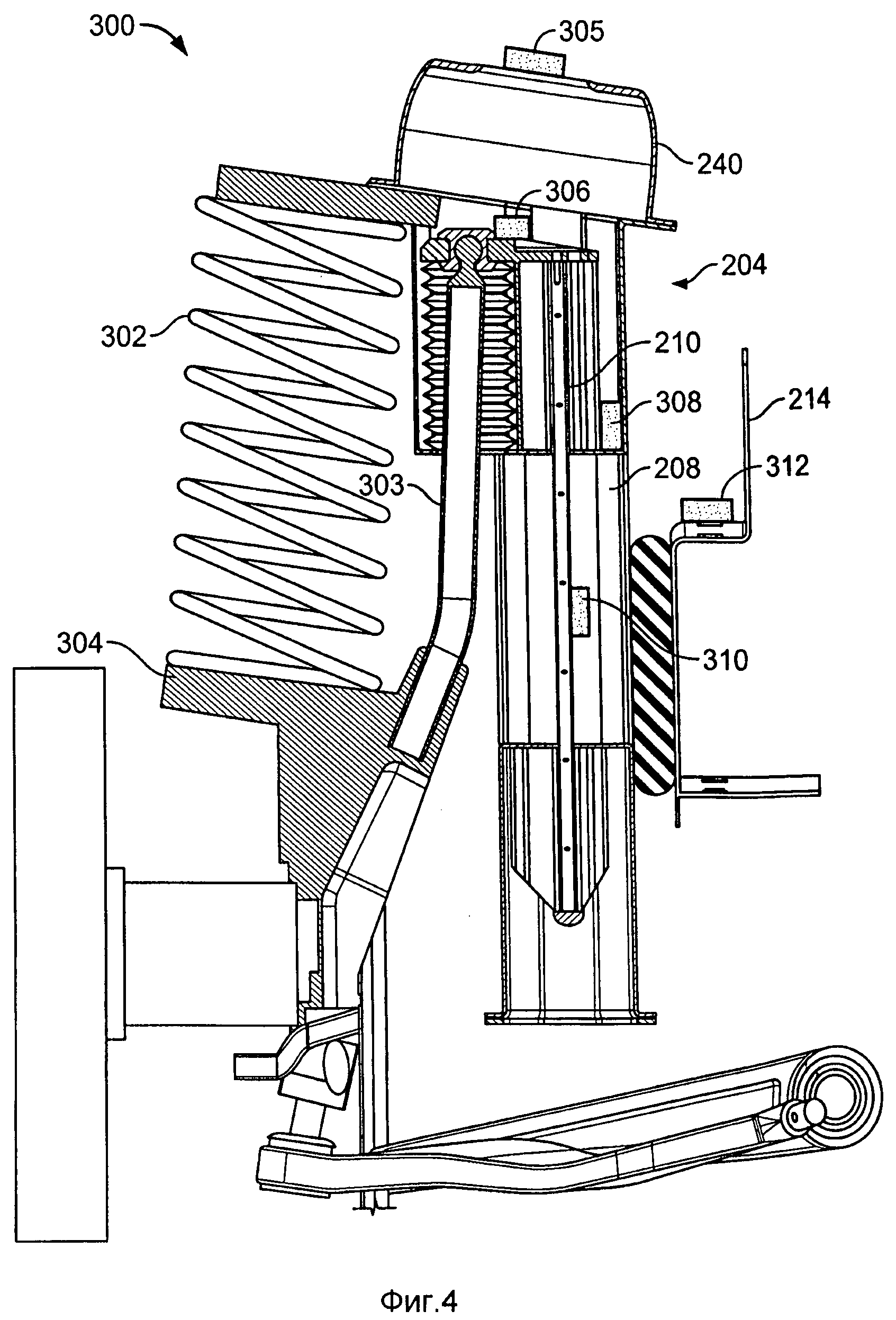
фиг.4 - вид активной системы подвески для одного колесного узла транспортного средства, соответствующей другому варианту осуществления изобретения;
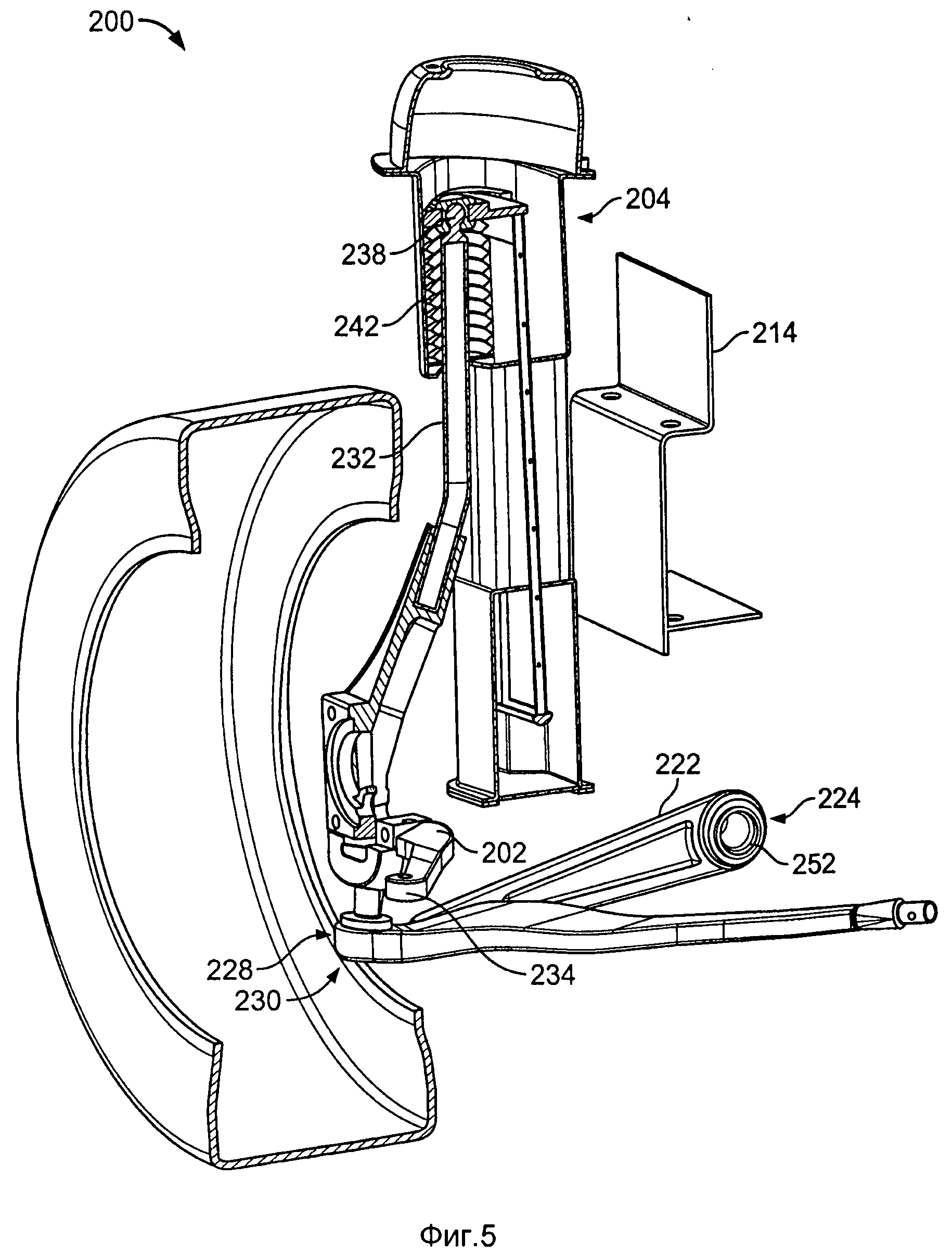
фиг.5 - вид в перспективе активной системы подвески с фиг.2;
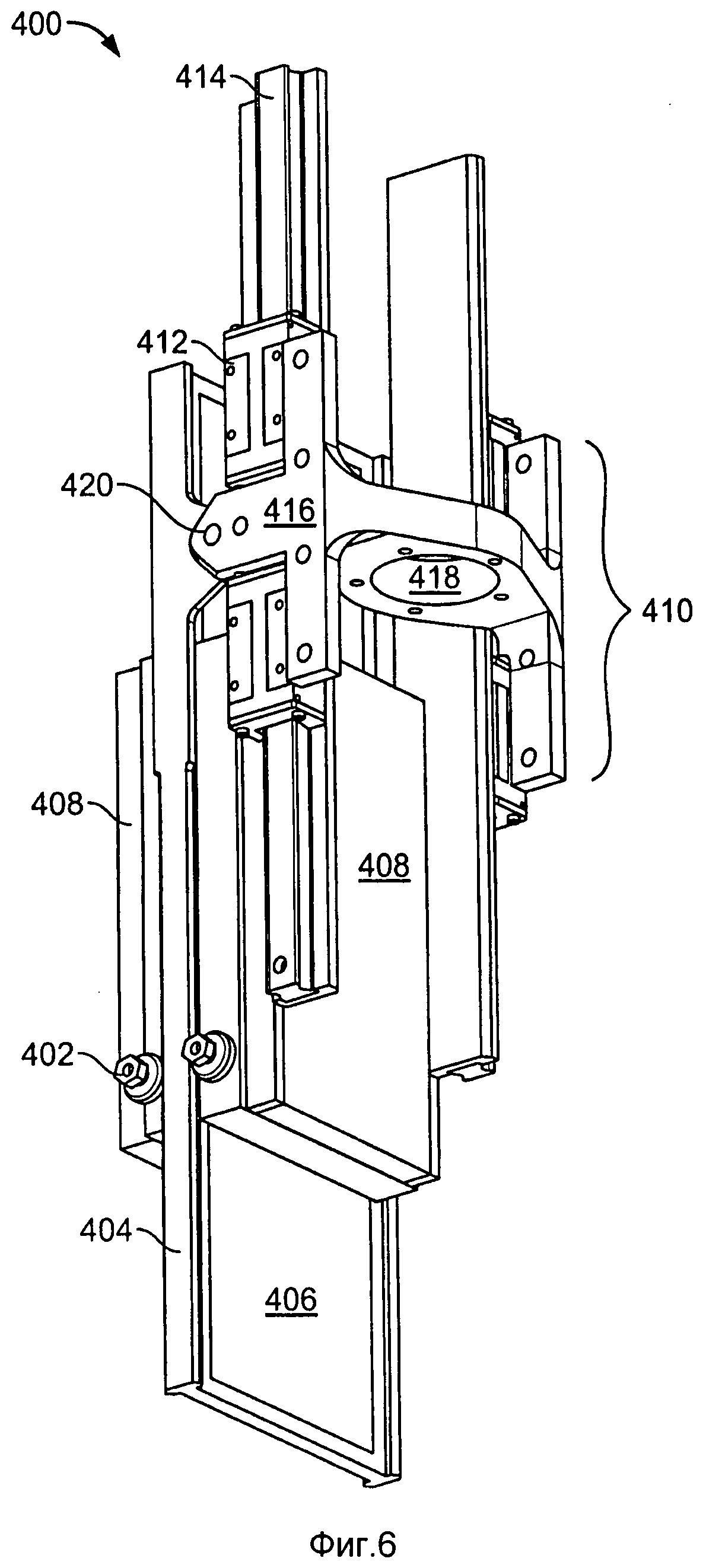
фиг.6 - вид электромагнитного привода, соответствующего одному варианту осуществления изобретения.
фиг.7А-7С - иллюстрации движения гофра электромагнитного привода, показанного на фиг.6;
фиг.8 - вид в перспективе электромагнитного привода, соответствующего другому варианту осуществления изобретения;
фиг.9 - вид, показанный на фиг.8, с удаленной частью корпуса для облегчения видения каретки в срединном положении;
фиг.10 - вид в перспективе механического стопора, который может использоваться в варианте осуществления изобретения, показанном на фиг.8;
фиг.11 - вид, показанный на фиг.9, с кареткой, показанной на одном конце пути ее движения;
фиг.12 - вид, показанный на фиг.9, с кареткой, показанной на другом конце пути ее движения;
фиг.13 - вид в перспективе электромагнитного привода, соответствующего другому варианту настоящего изобретения;
фиг.14 - вид, показанный на фиг.13, с удаленной частью корпуса для облегчения видения каретки в срединном положении;
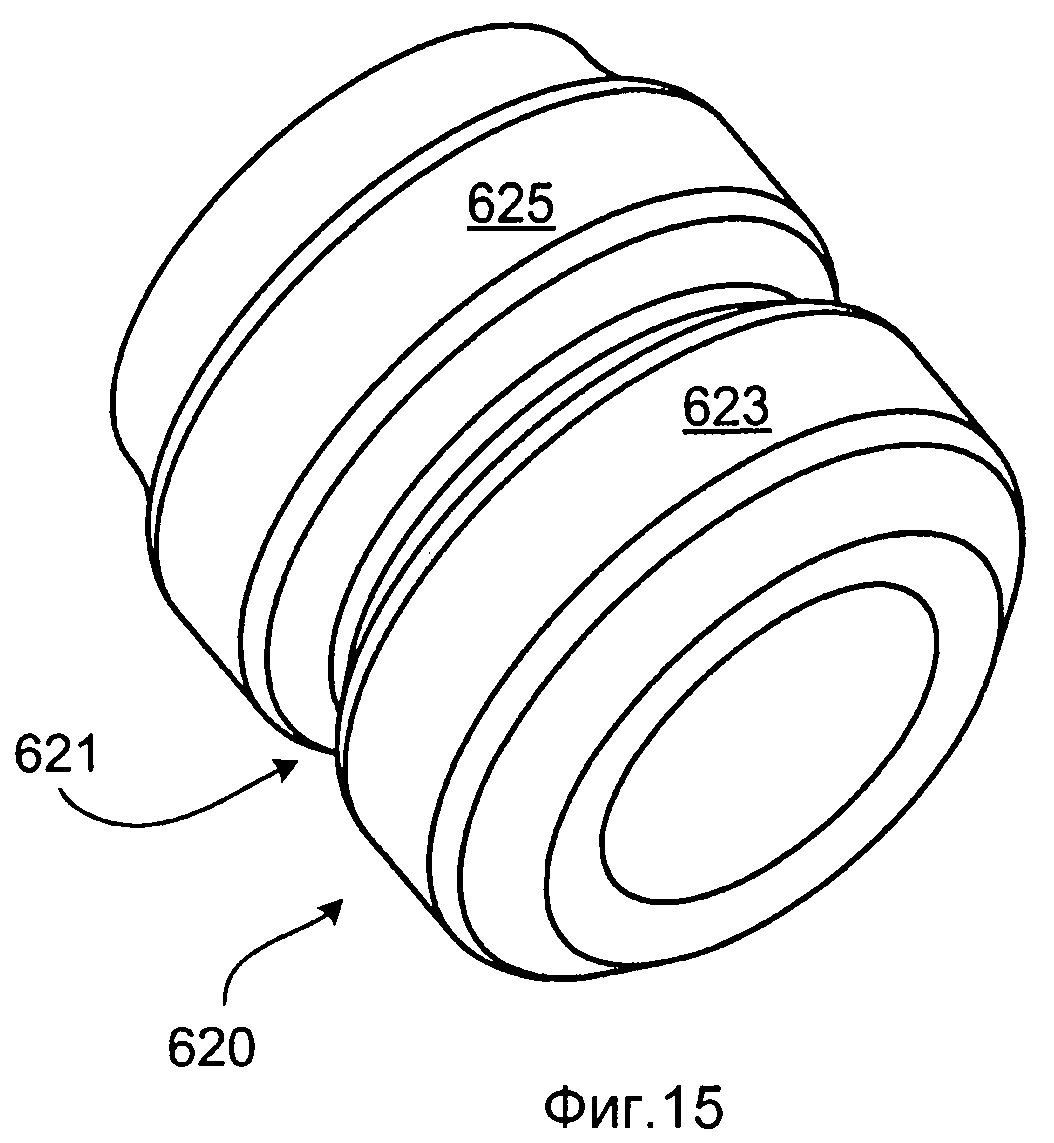
фиг.15 - вид в перспективе механического стопора, который может использоваться в варианте осуществления изобретения, показанном на фиг.13;
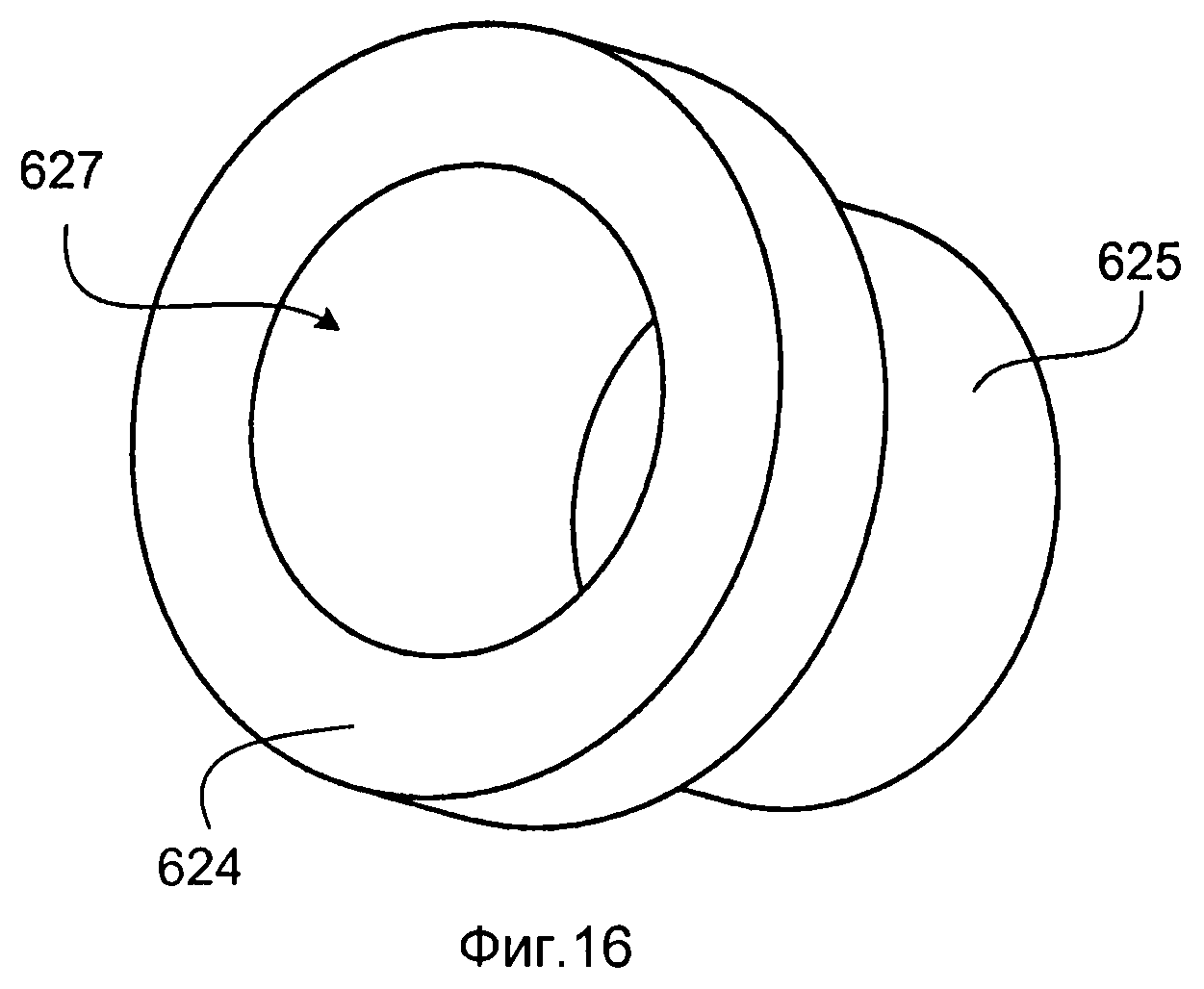
фиг.16 - вид в перспективе механического стопора, который может использоваться в варианте осуществления изобретения, показанном на фиг.13;
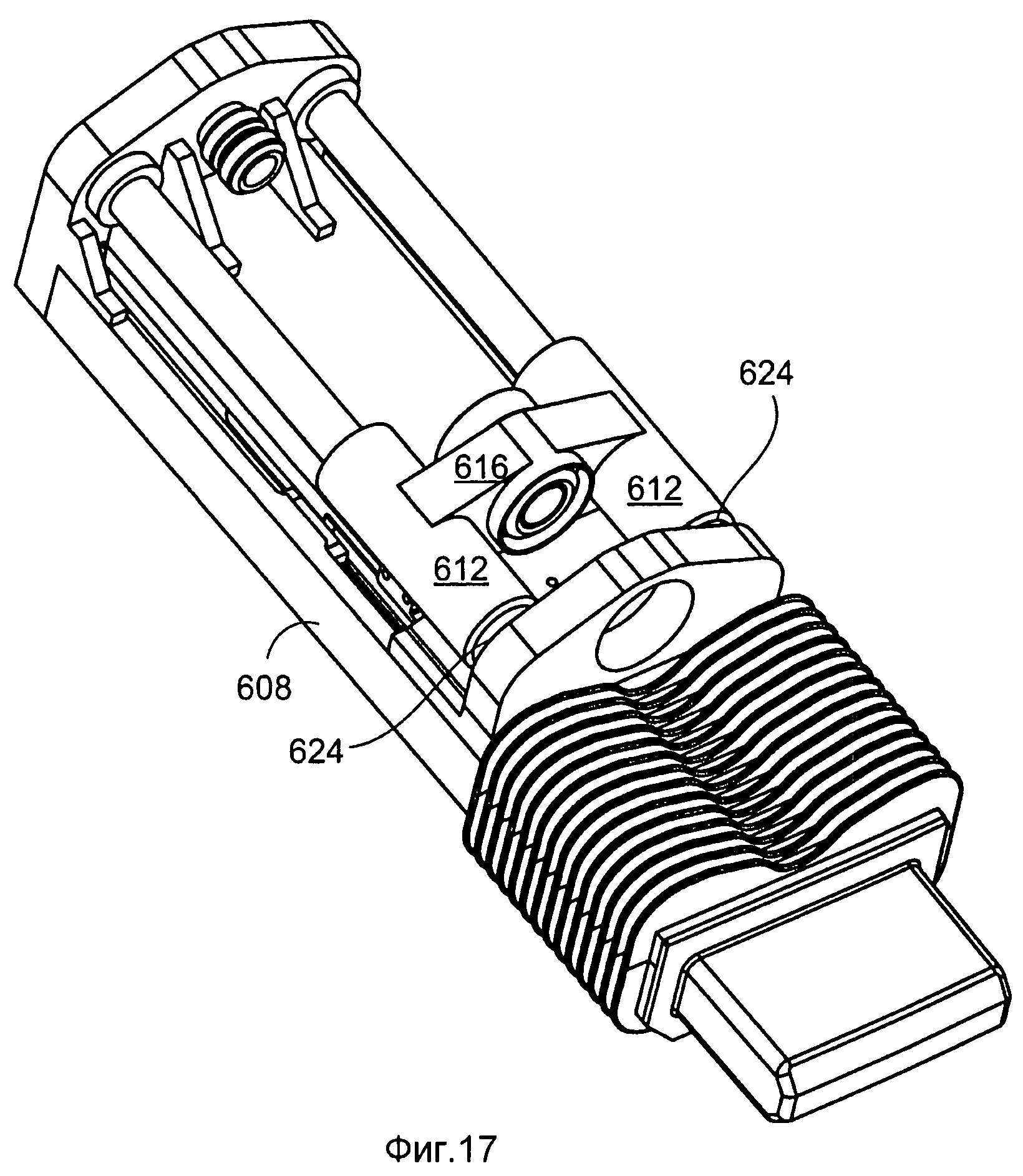
фиг.17 - вид, показанный на фиг.14, с кареткой, показанной на одном конце пути ее движения;
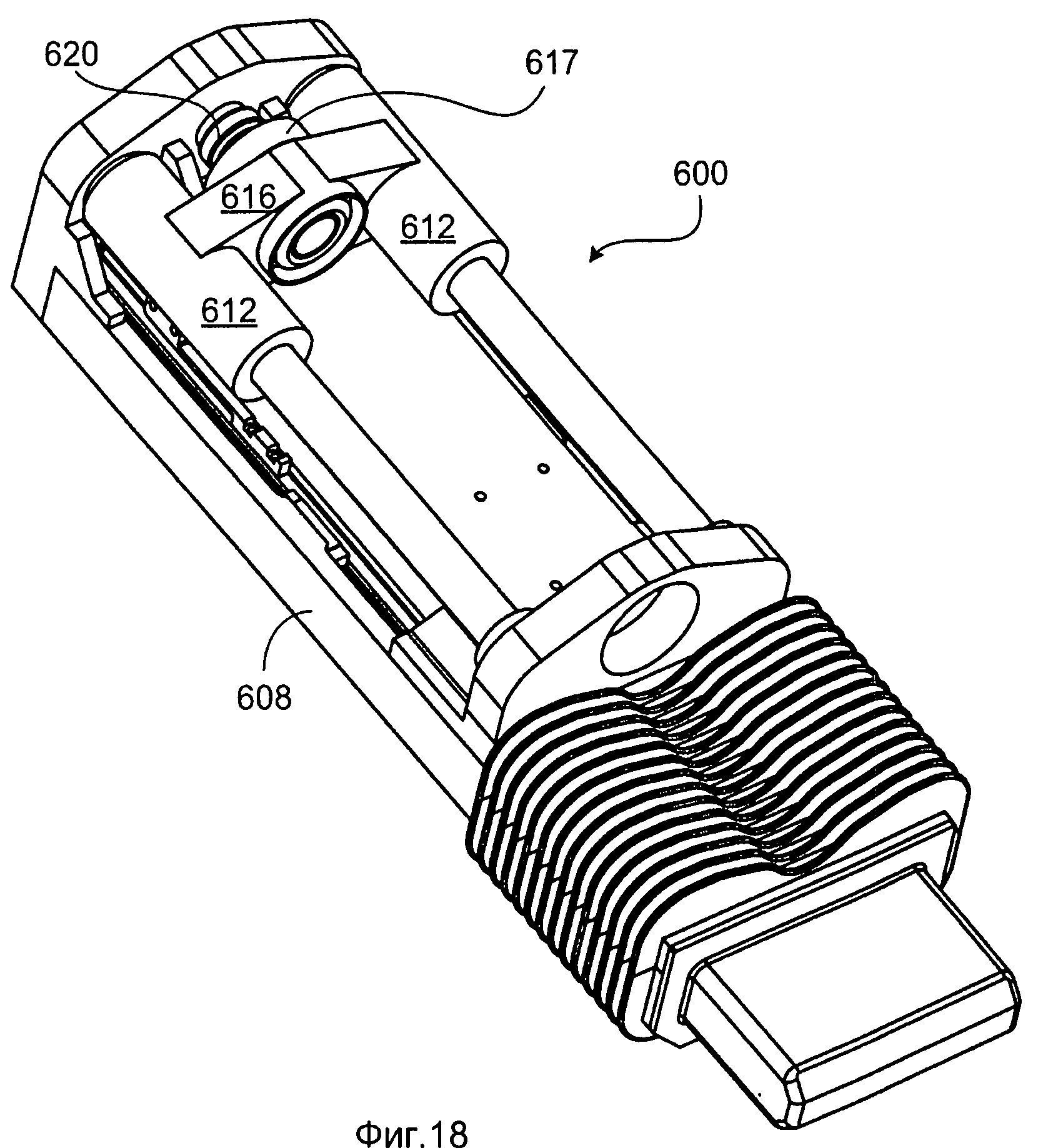
фиг.18 - вид, показанный на фиг.14, с кареткой, показанной на другом конце пути ее движения;
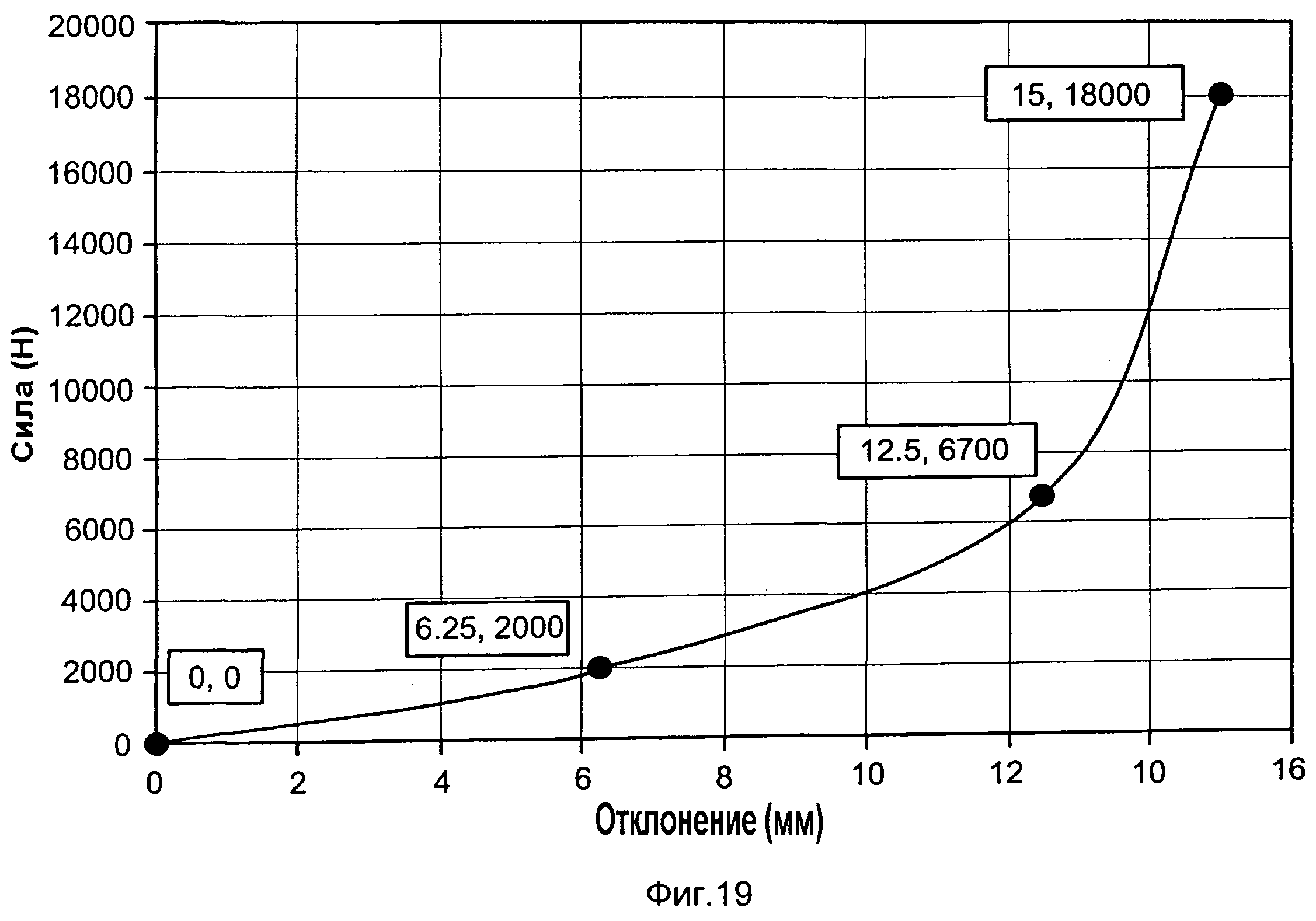
фиг.19 - диаграмма жесткости для механического стопора.
Система активной подвески для транспортного средства включает в себя управляемый источник силы, который создает изменяемую силу между колесным узлом транспортного средства и шасси транспортного средства. Колесный узел состоит из различных подвижных частей, которые механически соединены с колесом, таких как тяги, рычаги управления, ступицы, оси и т.д. Подвижные части увеличивают общую массу колесного узла. Обычно желательно уменьшать подвижную массу колеса.
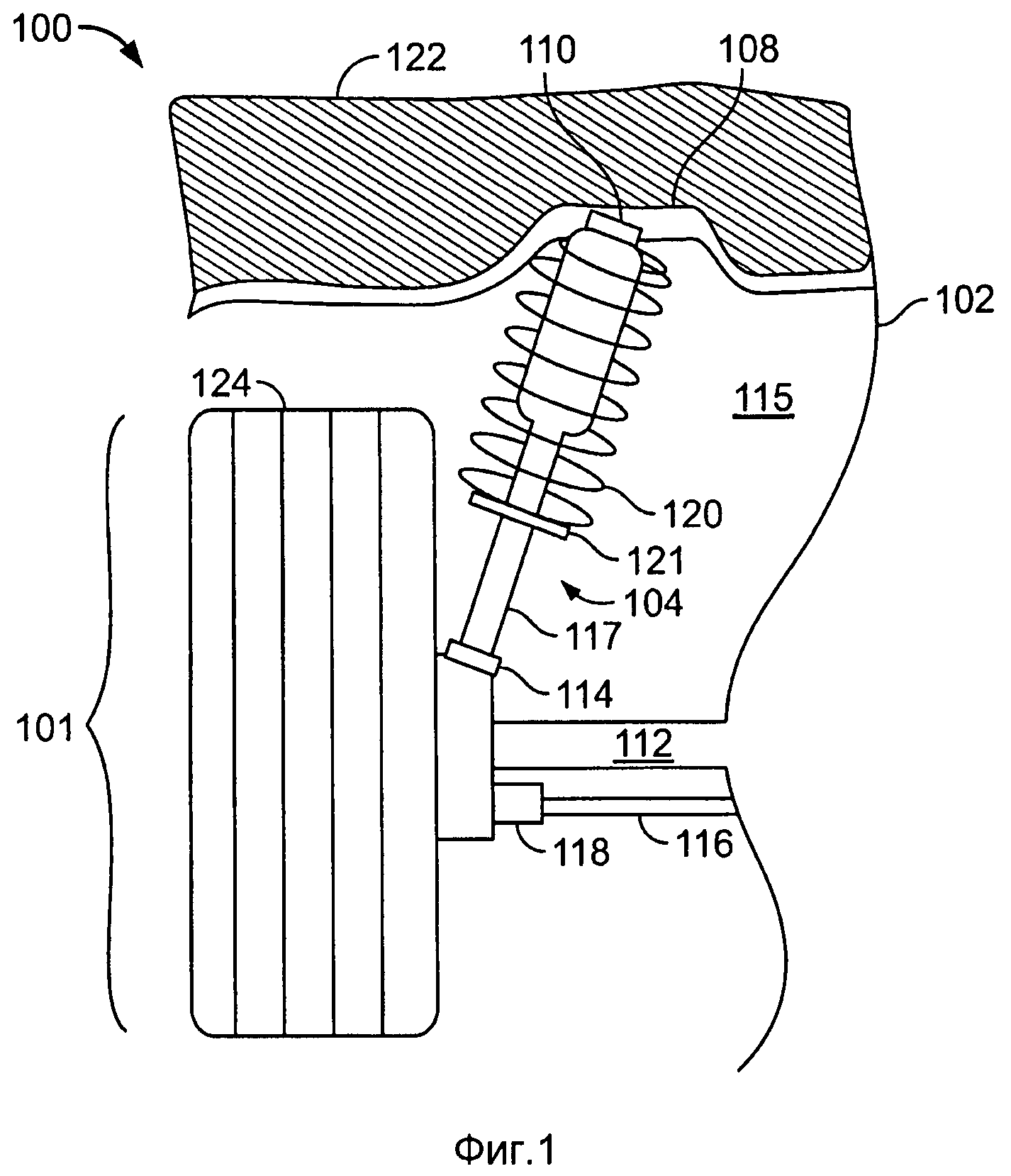
На фиг.1 показана схема активной системы 100 подвески для одного колесного узла 101 транспортного средства 102. Для ясности ось транспортного средства, приводной вал, кардан и различные другие компоненты колесного узла 101 не показаны. Активная система 100 подвески включает в себя управляемый силовой привод 104, который соединен между колесным узлом 101 и промежуточной опорой 108 транспортного средства 102. Привод 104 может быть, например, электромагнитным приводом или гидравлическим приводом. Верхняя часть управляемого силового привода 104 обычно прикреплена к опоре 108 при помощи первой втулки 110. Нижняя часть управляемого силового привода 104 может быть прикреплена непосредственно или при помощи второй втулки 114 к нижнему рычагу 112 управления.
Нижняя часть привода 104 прикреплена к кулаку колеса как можно ближе к вертикальной центральной линии колеса. Таким образом, привод 104 достигает почти однозначного отношения движения с колесом. Таким образом, движение каркаса привода приводит к соответствующему движению колеса. Это почти однозначное отношение движения означает, что, по существу, вся сила, генерируемая приводом 104, передается непосредственно ободу колеса. По существу, вся производимая приводом 104 сила эффективно используется для управления движением колесного узла 101. Когда один конец привода 104 непосредственно прикреплен к кулаку колеса, привод 104, можно сказать, смонтирован "за бортом" транспортного средства 102.
В системе 100 подвески, показанной на фиг.1, использован "телескопический привод". Под телескопичностью понимается то, что когда колесный узел движется вверх и вниз, реагируя на воздействия со стороны дороги, диапазон, который охватывает физическую структуру привода 104, изменяется в длину. Это означает, что конструктор подвески должен планировать изменения длины привода 104 при планировании пространства, требуемого в нише 115 шасси для размещения привода 104. Это отличается от "привода с фиксированным диапазоном", общий диапазон которого не изменяется при движении колеса. Один вариант выполнения привода с фиксированным диапазоном, соответствующего изобретению, описан со ссылками на фиг.2.
Телескопический привод 104, показанный на фиг.1, может требовать использования резиновых гофров (не показаны) для защиты подвижного якоря 117, когда он движется в привод 104 и из него. Поскольку якорь 117 может быть не круглым, резиновые гофры могут иметь не круглую форму. На практике наиболее легкая часть привода 104, которой обычно является якорь, соединена непосредственно с кулаком колеса. Таким образом, гофр обычно устанавливают низко, очень близко к колесу. Кроме того, поскольку гофр должен быть достаточно большим для окружения якоря привода 104, объем воздуха внутри гофра относительно велик. Таким образом, количество циркулирующего воздуха, когда якорь 117 движется, является существенным. По существу, привод 104 должен "дышать" (то есть совершать обмен воздуха, когда якорь движется вверх и вниз) для предотвращения смятия и раздувания гофра. Обычно требуется вентиляционное отверстие для воздуха (не показано) для регулирования перепада давлений внутри привода 104 и снаружи от него.
Рулевой привод включает в себя соединительную тягу 116. Соединительная тяга 116 соединена со шпинделем 118 колесного узла 101 и управляет направлением движения транспортного средства. Кроме того, между подвесочной опорой 108 и нижним рычагом 112 управления параллельно приводу 104 может быть присоединен пассивный элемент 120 подвески. В показанном варианте осуществления изобретения один конец пассивного элемента 120 подвески соединен с пластиной 121, которая прикреплена к срединной точке якоря 117 привода 104. Пассивный элемент 120 подвески может представлять собой, например, спиральную пружину или пневмоподушку. В альтернативном варианте пружина может быть прикреплена между рычагом управления подвески и шасси транспортного средства.
Подвесочная опора 108 соединена с шасси 122 транспортного средства 102. Шасси 122 транспортного средства 102 соединено с рамой (не показана) транспортного средства 102. Рама транспортного средства 102 является основанием, на котором установлено шасси 122 и другие компоненты транспортного средства 102. Например, конец нижнего рычага 112 управления, который не показан, соединен с рамой транспортного средства 102. Поскольку подвесочная опора 108 непосредственно соединена листовым металлом с рамой транспортного средства 102, и подвесочная опора 108, и рама могут рассматриваться как структурные элементы транспортного средства 102, пригодные в качестве линий передачи сил. Следует отметить, что только верхний конец привода 104, показанного на Фиг.1, непосредственно смонтирован на шасси/раме.
Привод 104 и пассивный элемент 120 подвески контролируют вертикальное отклонение колеса. Угол привода 104 относительно вертикальной плоскости оптимизирован для специфической геометрии подвески транспортного средства 102.
В этой конфигурации привод 104 непосредственно соединен с тягой подвески транспортного средства 102. Более конкретно, привод 104 активной системы 100 подвески, показанной на фиг.1, используется как структурный элемент подвески. Это, в свою очередь, требует того, что опорная система в приводе 104 служит для выполнения двух отдельных функций: (1) поддержания воздушного магнитного зазора между подвижным якорем и неподвижным узлом; (2) контроля нагрузок в повороте и разрывных нагрузок, поступающих в привод 104 от подвески. Эти нагрузки в повороте и разрывные нагрузки иногда называют изгибающими нагрузками.
Когда встречается выбоина или другая неровность на дороге, шине 124 передаются вертикальные, продольные и/или поперечные силы. Активная система 100 подвески, показанная на фиг.1, может использоваться для ослабления вертикального движения шасси 122, которое происходит от этих воздействий дороги. Показанная система 100 подвески существенно не ослабляет продольное, поперечное или, как можно назвать, боковое перемещение. Когда на систему 100 подвески воздействует продольная сила, вся масса привода 104 (как подвижных по вертикали, так и неподвижных элементов) отклоняется назад и вперед на верхней опоре 110 вместе с массой различных других компонентов подвески. Подобный результат возникает в отношении поперечных движений. Эти поперечные движения могут также увеличивать изгибающие нагрузки.
Если система 100 подвески, показанная на фиг.1, используется на транспортном средстве 102 спереди, то может потребоваться привод 104 для поворота с колесом. Для обеспечения поворота привода 104 требуется вращающаяся опора. Кроме того, поворот привода 104 требует использования гибких силовых кабелей и управляющих кабелей, имеющих адекватную способность снятия напряжений и проведенных к приводу 104. Более того, поскольку привод 104 непосредственно соединен с рулевым приводом, рулевой привод должен быть приспособлен к дополнительной массе привода 104 наряду с массой компонентов колеса, относящихся к рулевому управлению.
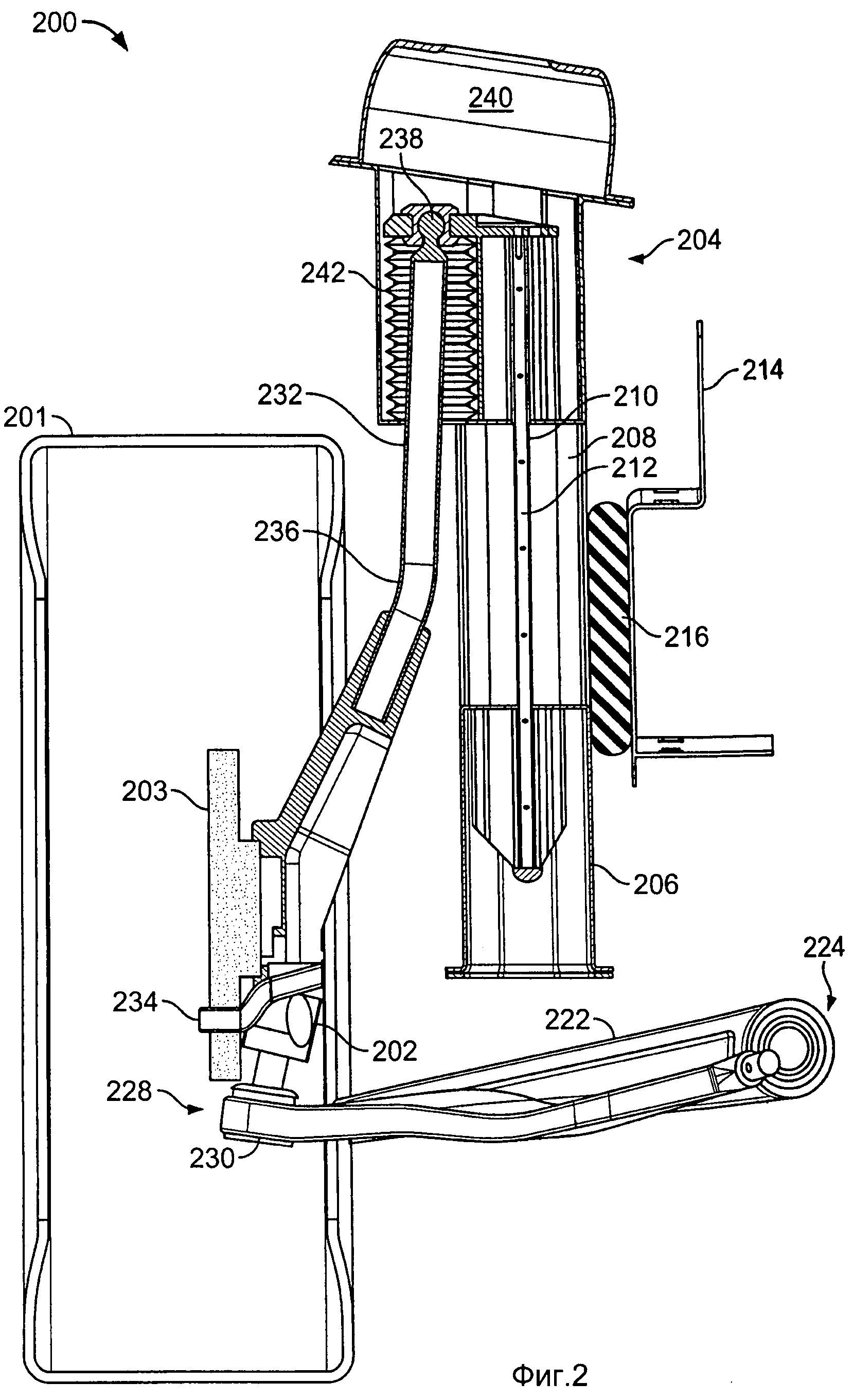
На фиг.2 показана активная система 200 подвески для одного колесного узла транспортного средства, соответствующая одному варианту осуществления изобретения. Хотя описана модель для одного колеса, изобретение может применяться для всех колес транспортного средства. Колесный узел включает в себя шину 201, шпиндель 202, ступицу 203, ось транспортного средства (не показана), приводной вал (не показан), кардан (не показан) и различные другие подвижные компоненты.
Активная система 200 подвески включает в себя активный элемент 204 подвески. Например, активный элемент 204 подвески может представлять собой электромагнитный привод. Привод 204 может представлять собой линейный привод или вращающийся привод. Кроме того, привод 204 может включать в себя подвижный магнит, подвижную катушку, переменное магнитное сопротивление или любую другую известную топологию электродвигателя. Пример активной системы подвески, имеющей активный элемент подвески, описан в патенте США №4981309, содержание которого включено сюда посредством ссылки. Этот патент описывает активный элемент подвески, представляющий собой электромагнитный привод.
Активный элемент 204 подвески может быть расположен в последовательной или параллельной конфигурации наряду с пассивным элементом подвески, например, таким как пружина или пневмоподушка.
Активный элемент 204 подвески включает в себя корпус 206. Внутри корпуса 206 установлен статор 208. Статор 208 может включать в себя обмотки электродвигателя. Активный элемент 204 подвески также включает в себя якорь 210. Якорь 210 может содержать один или более магнитов (не показан). Якорь 210 может также включать в себя подшипники 212. Подшипники 212 поддерживают магнитный воздушный зазор между якорем 210 и катушками статора и позволяют якорю 210 скользить относительно статора 208.
Активный элемент 204 подвески механически соединен с рамой 214 транспортного средства. Например, активный элемент 204 подвески может быть жестко соединен с рамой 214 или может быть соединен с рамой 214 при помощи втулки 216. В одном варианте осуществления изобретения активный элемент 204 подвески установлен, возможно, при помощи втулки, его средней секцией на шасси/раме транспортного средства. В одном варианте осуществления изобретения один конец активного элемента 204 подвески также прикреплен к подвесочной опоре в дополнение к прикреплению средней секцией к шасси/раме транспортного средства.
Активный элемент подвески, по существу, жестко прикреплен к раме транспортного средства таким образом, чтобы, по существу, исключалась механическая связь активного элемента подвески с боковым перемещением колеса транспортного средства. Под боковым перемещением подразумевается продольное и поперечное движение. Под отсутствием связи подразумевается, что продольные и поперечные силы и движения существенно уменьшены до того, как они могут быть переданы якорю 210 и/или активному элементу 204 подвески. В одном варианте осуществления изобретения разъединение достигается благодаря тяге управления, которая прикреплена между активным элементом подвески и колесом транспортного средства. Тяга управления описана здесь подробно.
В одном варианте осуществления изобретения от активного элемента 204 подвески к раме 214 по соединению проводится тепло. Например, статор 208 в активном элементе 204 подвески включает в себя катушки, которые могут генерировать тепло. Тепло может рассеиваться из активного элемента 204 подвески в раму транспортного средства без использования внешних вентиляционных средств или активного охлаждения.
Может быть желательным использование канала с низким тепловым сопротивлением между активным элементом 204 подвески и рамой 214 транспортного средства. Канал с низким тепловым сопротивлением может быть получен с использованием известных способов, таких как увеличение площади поверхности контакта между активным элементом 204 подвески и рамой, использование материала для корпуса, который имеет высокую теплопроводность (такого как алюминий), подготовка сопрягаемых поверхностей таким образом, чтобы они были как можно более плоскими и копланарными, и/или использование теплопроводных наполняющих материалов граничного слоя, таких как калорическая консистентная смазка или теплопроводные прокладки. В качестве средства сопряжения можно использовать теплопроводную втулку, когда эластомер, используемый для изготовления втулки, имеет высокое процентное содержание добавленного теплопроводного наполнителя (чешуек алюминия или меди, или другого теплопроводного наполнителя).
Нижний рычаг 222 управления включает в себя первый конец 224, который соединен с рамой 214 при помощи втулки или подшипника (не показаны). Втулка/подшипник позволяет рычагу 222 управления поворачиваться, когда колесный узел перемещается в вертикальном направлении. Нижний рычаг 222 управления включает в себя второй конец 228, имеющий шаровой шарнир 230, который соединен со шпинделем 202. Шпиндель 202 включает в себя рычаг 234 рулевого привода. Рычаг 234 рулевого привода механически соединен с соединительной тягой (не показана). Соединительная тяга представляет собой компонент в рулевом приводе транспортного средства. Движение соединительной тяги вызывает поворот колеса транспортного средства шпинделем 202.
Тяга 232 управления соединена между активным элементом 204 подвески и шпинделем 202 колесного узла. В одном варианте осуществления изобретения рычаг 232 управления соединен с якорем 210 активного элемента 204 подвески. Тяга 232 управления может включать изгиб 236. Изгиб 236 конфигурирован таким образом, чтобы обеспечивать достаточное удаление шины от активного элемента 204 подвески. Например, удаление шины может составлять два сантиметра или более. Тяга 232 управления может быть соединена с активным элементом 204 подвески при помощи шарового шарнира 238. Шаровой шарнир 238 конфигурирован таким образом, чтобы он допускал поворот тяги 232 управления относительно якоря 210 активного элемента 204 подвески. Тяга 232 управления в альтернативном варианте может быть соединена с активным элементом 204 подвески при помощи втулки (не показана). В одном варианте осуществления изобретения тяга 232 управления выполнена с возможностью поворота с колесом 201 транспортного средства при повороте колеса при рулевом управлении. Например, когда система 200 подвески, показанная на фиг.2, используется в передней части транспортного средства, для рулевого управления может использоваться шаровой шарнир в верхней или нижней части тяги 232 управления. В целом стоимость и сложность шарового шарнира меньше стоимости вращающейся опоры. Кроме того, неподвижный характер активного элемента 204 подвески устраняет потребность в гибкой электропроводке.
Как и система 100 подвески, показанная на фиг.1, система 200 подвески, показанная на фиг.2, достигает, по существу, однозначного отношения движения между движением якоря 210 и движением колесного узла. Однако однозначное отношение движения достигается по-разному. В частности, тяга 232 управления обеспечивает то, что любое движение якоря 210 непосредственно приводит к движению колеса. Подобно тому, как это происходит в системе 100, показанной на фиг.1, вся способность создания силы активного элемента 204 подвески эффективно используется для управления движением колеса. Однако конфигурация, показанная на фиг.2, не требует прикрепления одного конца активного элемента 204 подвески к кулаку вблизи колеса. В свою очередь, это делает компоновку активного элемента 204 подвески относительно прямой, поскольку конструировать сечение тяги 232 управления в целом просто, и оно меньше соответствующего сечения в активном элементе 204 подвески. Поскольку активный элемент 204 подвески не прикреплен непосредственно к кулаку колеса, активный элемент 204 подвески установлен, можно сказать, "на борту" транспортного средства. Установленный на борту активный элемент 204 подвески можно легче компоновать, и он допускает большее разнесение между колесом и активным элементом 204 подвески.
Опорная система 212 в активном элементе 204 подвески в целом выполняет две функции. Первая функция опорной системы 212 состоит в поддержании магнитного воздушного зазора между якорем 210 и статором 208. Вторая функция опорной системы 212 состоит в поглощении нагрузок в повороте и разрывных нагрузок. Можно показать, что величина нагрузок в повороте и разрывных нагрузок, которые передаются опорам привода 204, показанного на фиг.2, уменьшены по сравнению с теми, которые относятся к приводу 104, показанному на фиг.1. Это происходит, по меньшей мере, частично вследствие того, что тяга 232 управления выполнена с возможностью поглощения большей части напряжений, создаваемых изгибающими нагрузками, которые, в противном случае, передавались бы якорю 210 через опоры 212. Кроме того, когда на систему 100 подвески, показанную на фиг.1, воздействует продольная сила, вся масса привода 104 (как перемещающихся вертикально, так и неподвижных элементов) отклоняется назад и вперед на верхней втулке вместе с массой различных других компонентов подвески. Подобный результат возникает относительно поперечных перемещений. В противоположность этому, когда продольная сила воздействует на систему 200 подвески, показанную на фиг.2, только масса тяги 232 управления отклоняется назад и вперед вместе с массой различных других компонентов подвески. Это также относится к воздействиям в поперечном направлении. По существу, отклоняющаяся масса в системе 200 подвески, показанной на фиг.2, уменьшена по сравнению с отклоняющейся массой в системе 100 подвески, показанной на фиг.1.
В противоположность приводу 104, показанному на фиг.1, активный элемент 204 подвески назван приводом с фиксированной огибающей. В этом варианте осуществления изобретения тяга 232 управления, соединяющая якорь 210 с колесом, движется вверх и вниз с колесом, а весь корпус 206, окружающий привод 204, не изменяется в длину. Эта зафиксированная огибающая может быть преимуществом компоновки.
Активный элемент 204 подвески может включать в себя верхнюю крышку 240. Верхняя крышка 240 защищает статор 208, якорь 210 и другие компоненты, расположенные в активном элементе 204 подвески. Например, другие компоненты могут включать в себя датчики, такие как датчики положения или акселерометры, или печатные платы и другие схемы. В одном варианте осуществления изобретения в активный элемент 204 подвески включена схема усилителя (не показана).
Верхняя крышка 240 также закрывает часть тяги 232 управления. Для дополнительной защиты внутренних компонентов активного элемента 204 подвески от внешних загрязнений вокруг части тяги 232 управления может быть расположен гофр 242. Гофр 242 может быть относительно небольшим, поскольку он окружает только тягу 232 управления. Таким образом, объем изолированного воздуха внутри гофра 242 может быть достаточно небольшим, чтобы не требовались вентиляционные средства, когда гофр 242 расширяется и сжимается. Небольшой гофр 242, показанный на фиг.2, уменьшает проблему "дыхания" и возможно устраняет необходимость в циркуляции воздуха. Таким образом, активный элемент 204 подвески может быть герметизированным приводом.
Таким образом, в одном варианте осуществления изобретения активная система 200 подвески включает в себя активный элемент 204 подвески, который представляет собой линейный электромагнитный привод. Привод может включать в себя статор и якорь, который может перемещаться относительно статора. Статор может быть, по существу, жестко прикрепленным к раме транспортного средства. К якорю прикреплена тяга управления, имеющая первый конец. Второй конец тяги управления прикреплен к колесу транспортного средства таким образом, что движение якоря вызывает движение колеса транспортного средства относительно рамы транспортного средства.
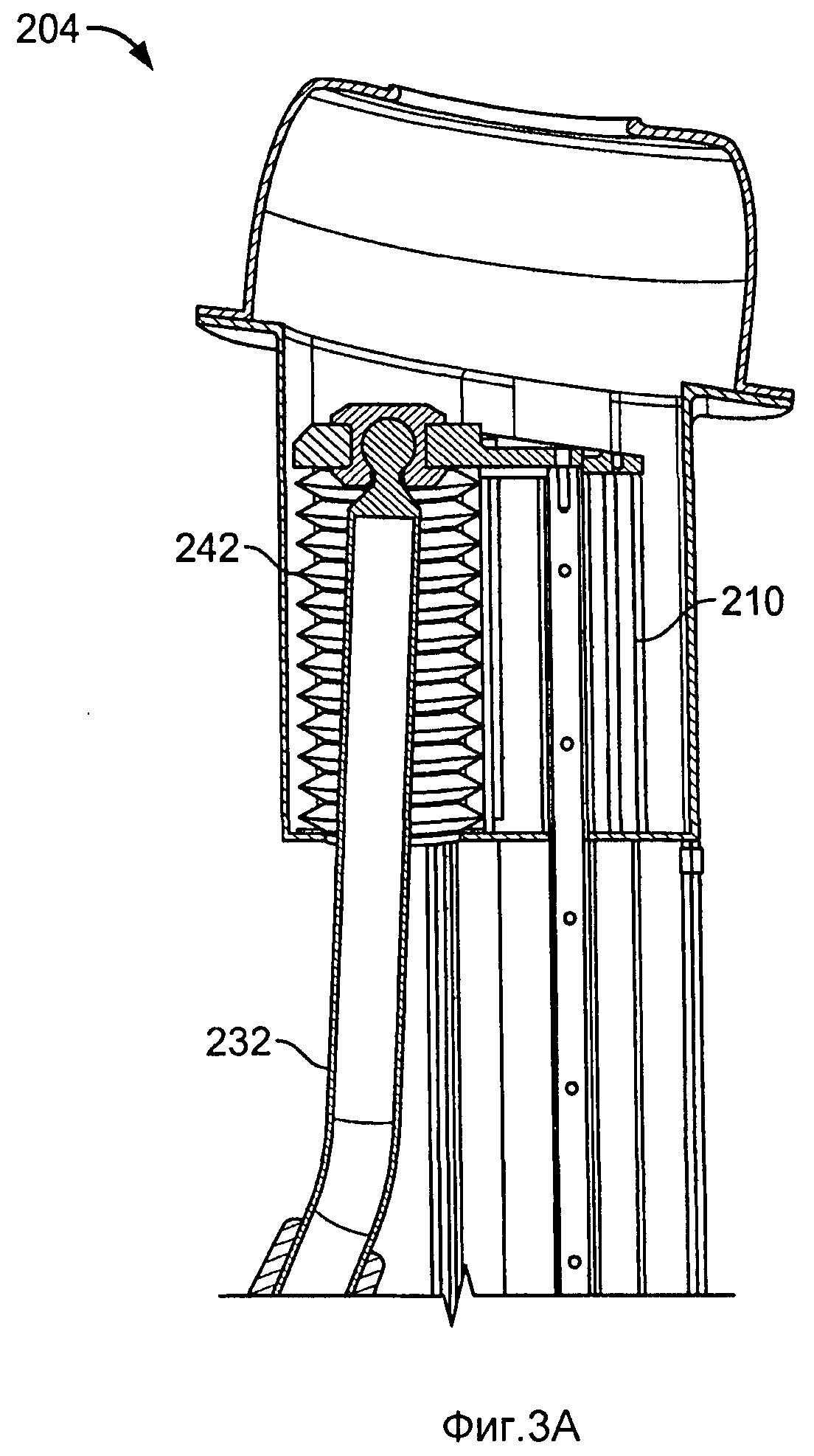
На фиг.3А, 3В и 3С показано движение тяги 232 управления относительно активного элемента 204 подвески, соответствующего изобретению. Контроллер (не показан) генерирует сигнал управления, который управляет движением якоря 210 в активном элементе 204 подвески. Контроллер может передавать сигнал управления в усилитель (не показан), который приводит в действие активный элемент 204 подвески. Усилитель может быть внешним относительно активного элемента 204 подвески или может находиться в активном элементе 204 подвески.
Как описано выше, отношение движения тяги 232 управления к движению якоря 210 активного элемента 204 подвески может быть однозначным. В одном варианте осуществления изобретения отношение может быть отличным от однозначного. Например, для каждого перемещения якоря 210 на один дюйм тяга 232 управления может перемещаться более, чем на один дюйм или менее, чем на один дюйм, в зависимости от механической конструкции системы. В одной конфигурации нижний конец тяги 232 управления может быть прикреплен к средней части нижнего рычага 222 управления (см. фиг.2), а не к шпинделю 202. Кроме того, между тягой 232 управления и колесным узлом и/или якорем 210 может быть добавлено одно или более механических соединений для изменения отношения движения тяги 232 управления к движению колесного узла и/или якоря 210.
На фиг.3А показан пример, в котором якорь 210 активного элемента 204 подвески находится в нейтральном или центральном положении. Тяга 232 управления также находится в центральном положении. Гофр 242 показан в полусжатом состоянии.
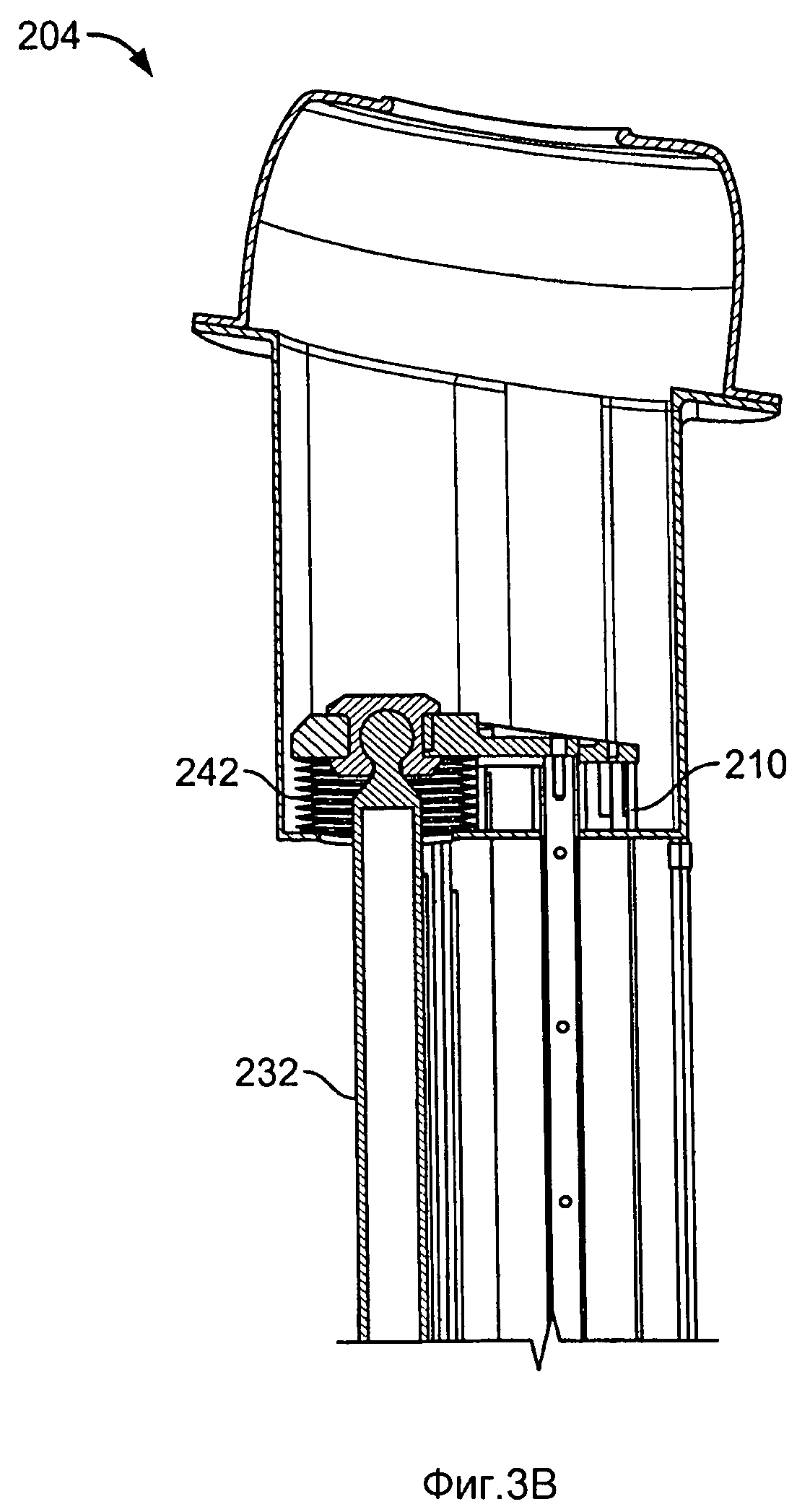
На фиг.3В показан пример, в котором якорь 210 активного элемента 204 подвески находится в самом нижнем положении. Тяга 232 управления также находится в самом нижнем положении. Гофр 242 показан в полностью сжатом состоянии.
На фиг.3С показан пример, в котором якорь 210 активного элемента 204 подвески находится в самом верхнем положении. Тяга 232 управления также находится в самом верхнем положении. Гофр 242 показан в полностью растянутом состоянии.
На фиг.4 показана активная система 300 подвески для одного колесного узла транспортного средства, соответствующая другому варианту осуществления изобретения. Активная система 300 подвески включает в себя активный элемент 204 подвески, а также пассивный элемент 302 подвески. В показанном варианте осуществления изобретения пассивный элемент 302 подвески представляет собой спиральную пружину в конфигурации, параллельной активному элементу 204 подвески. В других вариантах осуществления изобретения пассивный элемент подвески представляет собой, например, торсионную пружину, пластинчатую пружину или пневматическую рессору. Пассивный элемент 302 может быть физически составлен одним или более средств, расположенных последовательно или параллельно, и может быть защищен корпусом, который содержит активный элемент 204 подвески. Например, пневматические рессоры могут быть установлены параллельно спереди и сзади от элемента 204. В другом варианте осуществления изобретения (не показан) пассивный элемент 302 подвески может быть выполнен в последовательной конфигурации с активным элементом 204 подвески. В целом пассивный элемент 302 подвески может быть установлен в любом месте между подвижным элементом колесного узла и рамой или шасси транспортного средства.
Активная система 300 подвески также включает в себя тягу 303 управления, которая соединена с активным элементом 204 подвески. Тяга 303 управления может содержать кронштейн 304 для удерживания нижнего конца пассивного элемента 302 подвески.
Активная система 300 подвески может также включать в себя один или более датчиков, которые могут генерировать сигналы датчиков, которые отображают перемещение различных компонентов в системе 300. Датчики могут быть соединены с контроллером (не показан), имеющим процессор. Контроллер принимает сигналы датчиков и генерирует сигналы управления. Сигналы управления передаются в усилитель (не показан), который приводит в действие активный элемент 204 подвески. Контроллер и/или усилитель могут быть интегрированы в активный элемент 204 подвески или могут быть внешними относительно активного элемента 204 подвески.
Например, датчик 305 может быть прикреплен к верхней крышке 240. Датчик 305 может представлять собой, например, акселерометр, который может измерять перемещение активного элемента 204 подвески, когда транспортное средство движется по дорожной поверхности.
Другой датчик 306 может быть расположен на якоре 210 активного элемента 204 подвески. Датчик 306 может представлять собой акселерометр, который измеряет перемещение якоря 210. Перемещение якоря 210 непосредственно соотносится с перемещением тяги 303 управления и, таким образом, с движением колеса. В другом варианте осуществления изобретения датчик 306 может представлять собой датчик смещения, который определяет положение якоря 210.
Датчик 308 может быть расположен внутри активного элемента 204 подвески. Датчик 308 может представлять собой датчик смещения, который измеряет положение якоря 210 относительно статора 208. Положение якоря 210 соответствует положению тяги 303 управления и, таким образом, положению колеса. В одном варианте осуществления изобретения датчик 310 может быть расположен на якоре 210. Датчик 310 может представлять собой датчик смещения, который измеряет положение якоря 210 относительно статора 208. Пример датчика смещения описан в патенте США №5574445, содержание которого включено сюда посредством ссылки материала. Могут использоваться другие датчики в различных конфигурациях и расположенные в разных местах в транспортном средстве для измерения параметров рамы 214 транспортного средства и/или колесного узла.
Другой датчик 312 может быть расположен на раме 214 транспортного средства. Датчик может представлять собой акселерометр, который измеряет перемещение рамы 214, когда транспортное средство движется по дорожной поверхности. Может использоваться любое количество датчиков или комбинаций датчиков для измерения перемещения рамы 214, якоря 210 и колесного узла. Термин "перемещение" использован здесь как означающий смещение, скорость и/или ускорение.
На фиг.5 показан вид в перспективе активной системы 200 подвески, показанной на фиг.2. Активная система 200 подвески включает в себя активный элемент 204 подвески. Активный элемент 204 подвески механически соединен с рамой 214 транспортного средства. Как описано выше, масса активного элемента 204 подвески, по существу, отсоединена от компонентов колесного узла.
Тяга 232 управления механически соединена с активным элементом 204 подвески при помощи шарового шарнира 238. Шаровой шарнир 238 выполнен с возможностью обеспечения поворота тяги 232 управления из стороны в сторону при движении колеса для рулевого управления транспортным средством. Рычаг 234 рулевого управления шпинделя 202 соединен с соединительной тягой (не показана) для облегчения рулевого управления. Первый конец 228 нижнего рычага 222 управления соединен с нижним шаровым шарниром 230. Второй конец 224 нижнего рычага 222 управления включает в себя соединитель 252. В одном варианте осуществления изобретения соединитель 252 предназначен для размещения торсионной пружины, которая включает в себя шлицевой конец. Торсионная пружина выполнена с возможностью удерживания, по меньшей мере, части статической массы транспортного средства. В других вариантах осуществления изобретения также могут использоваться спиральные пружины, пластинчатые пружины и/или пневматические рессоры.
Гофр 242 выполнен таким образом, что он допускает вертикальное движение тяги 232 управления и предотвращает загрязнение извне внутренних компонентов активного элемента 204 подвески. Гофр 242 может быть изготовлен из пригодного гибкого материала, например, такого как резина, пластмасса или ткань. Кроме того, объем воздуха внутри гофра 242 может быть достаточно малым для того, чтобы не требовалась вентиляция с сообщением с внешней средой. Для изолирования активного элемента 204 подвески можно также использовать другие изолирующие структуры, например, такие как дефлектор, телескопический канал или резиновая трубка.
На фиг.6 показан электромагнитный привод 400, соответствующий одному варианту осуществления изобретения. Электромагнитный привод 400 представляет собой привод с двумя опорами. Например, первая опора 402 используется для поддержания магнитного зазора в конструкции электродвигателя электромагнитного привода 400. Первая опора 402 соединена с направляющей 404 якоря 406 привода 400 и допускает движение якоря 406 относительно статора 408 привода 400. В одном варианте осуществления изобретения направляющая 404 может использоваться с двумя опорными ползунами для поддержания магнитного зазора.
В одном варианте осуществления изобретения статор 408 жестко прикреплен к раме транспортного средства. Статор 408 также может быть прикреплен к раме при помощи втулки. Установка на раме обеспечивает подключение к приводу 400 сигнальных и силовых кабелей с минимальным изгибанием. Например, сигнальные и силовые кабели могут быть проведены вдоль рамы транспортного средства и прикрепляться непосредственно к установленному на раме приводу 400. Таким образом, изгибание кабеля минимизируется со снижением риска повреждения кабеля. Кроме того, силовые кабели, проводящие относительно сильный ток, могут быть хорошо изолированы и защищены от дорожной грязи и т.д.
Вторая опорная система 410 используется для удерживания нагрузок на подвеску. Например, вторая опорная система 410 может предотвращать передачу якорю 406, по существу, всех нагрузок в повороте и разрывных нагрузок на систему подвески. Это упрощает конструкцию и требования по нагрузке первой опоры 402. Вторая опорная система 410 включает опорные ползуны 412. Опорные ползуны 412 движутся на опорных направляющих 414. Опорные направляющие 414 жестко установлены на статоре 408, который в целом установлен на раме транспортного средства. Следует отметить, что нагрузки в повороте и разрывные нагрузки могут быть преобразованы в боковое перемещение колеса, включающее продольное и поперечное движение.
С опорными ползунами 412 механически соединена каретка 416. Каретка 416 выполнена с гнездом 418, которое предназначено для размещения шарового шарнира. Шаровой шарнир прикреплен к верхней части тяги управления, такой как тяга 232 управления, показанная на фиг.2. В одном варианте осуществления изобретения гнездо 418 предназначено для размещения вкладыша.
В одном варианте осуществления изобретения каретка 416 соединена с якорем 404 при помощи пальца 420. Палец 420 может быть изготовлен из любого пригодного материала, например, такого как закаленная сталь. В другом варианте осуществления изобретения каретка 416 может быть соединена с якорем 404 при помощи изогнутого элемента (не показан) вместо пальца.
Палец 420 может допускать движение каретки 416 относительно якоря 406. Это может также устранять изгибающие нагрузки подвески на первую опору 402. Таким образом, может не требоваться поглощение изгибающих нагрузок подвески первой опорой 402, и она может иметь более простую конструкцию.
Электромагнитный привод 400 может также включать в себя различные датчики (не показаны). Датчики могут измерять различные параметры электромагнитного привода 400. Например, может использоваться датчик положения для определения положения якоря 406 относительно статора 408. Может использоваться акселерометр для измерения перемещения каретки 416. Сигналы датчиков могут передаваться в контроллер (не показан), который является либо интегрированным в электромагнитный привод 400, либо внешним. Контроллер генерирует сигналы управления, которые используются для управления электромагнитным приводом 400. В одном варианте осуществления изобретения сигналы управления управляют усилителем (не показан), который приводит в действие электромагнитный привод 400. Усилитель может быть интегрированным в электромагнитный привод 400 или внешним.
При работе контроллер (не показан) передает сигнал управления в усилитель, который имеет электрическое соединение с катушками статора 408. Сигнал управления принимает сигнал датчика и подает команду электромагнитному приводу 400 на приведение в действие и движение в нейтральное положение. Когда транспортное средство движется по дороге, воздействия со стороны дороги вызывают движение колес и шасси, по существу, в вертикальном направлении. Датчики в электромагнитном приводе 400 или на нем, на колесе и/или на шасси транспортного средства отслеживают движение колеса и шасси и передают сигналы датчиков в контроллер. Контроллер генерирует сигналы управления и передает сигналы управления в усилитель. Усилитель обрабатывает и передает сигналы управления электромагнитному приводу 400. В одном варианте осуществления изобретения контроллер на основе сигналов обратной связи от датчиков совершает попытку минимизировать быстрое вертикальное движение шасси, когда транспортное средство движется по пересеченной местности. Сигналы управления от контроллера могут также вызывать плотное следование колесами различным контурам местности.
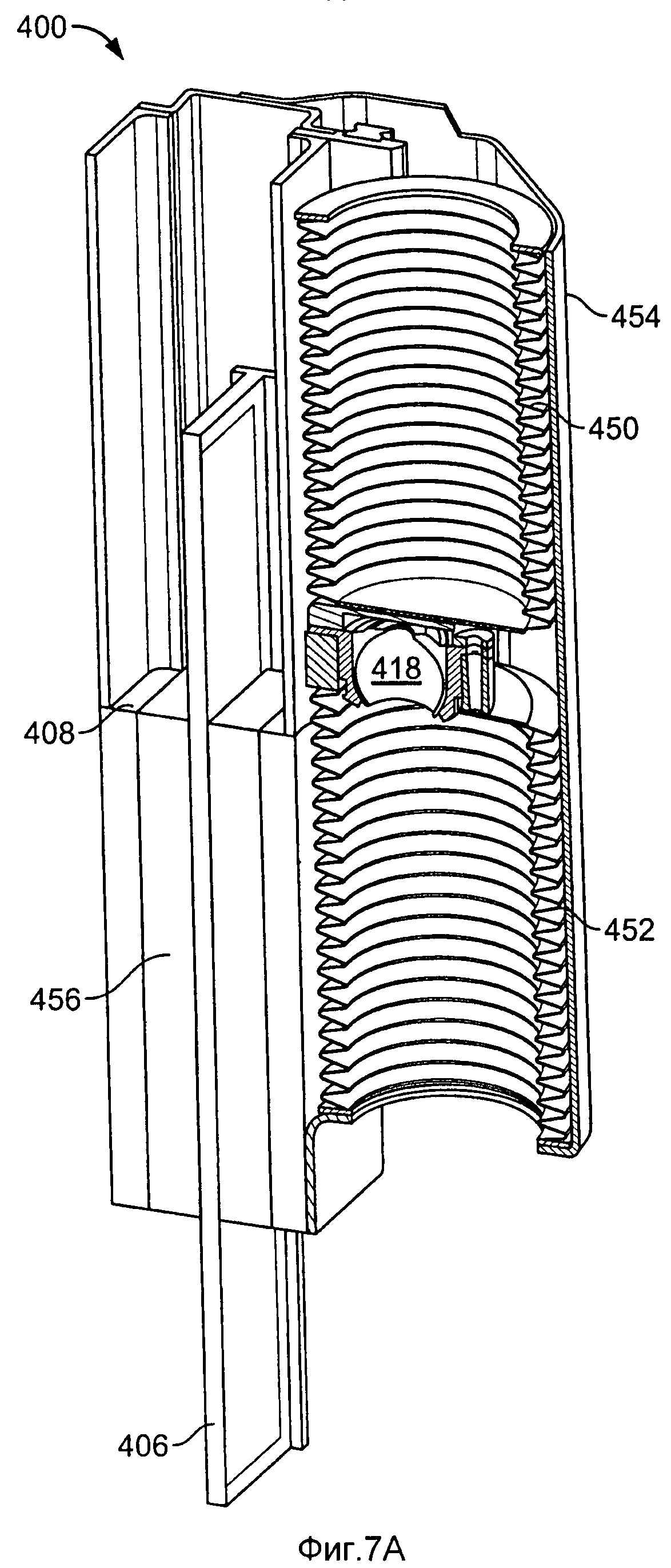
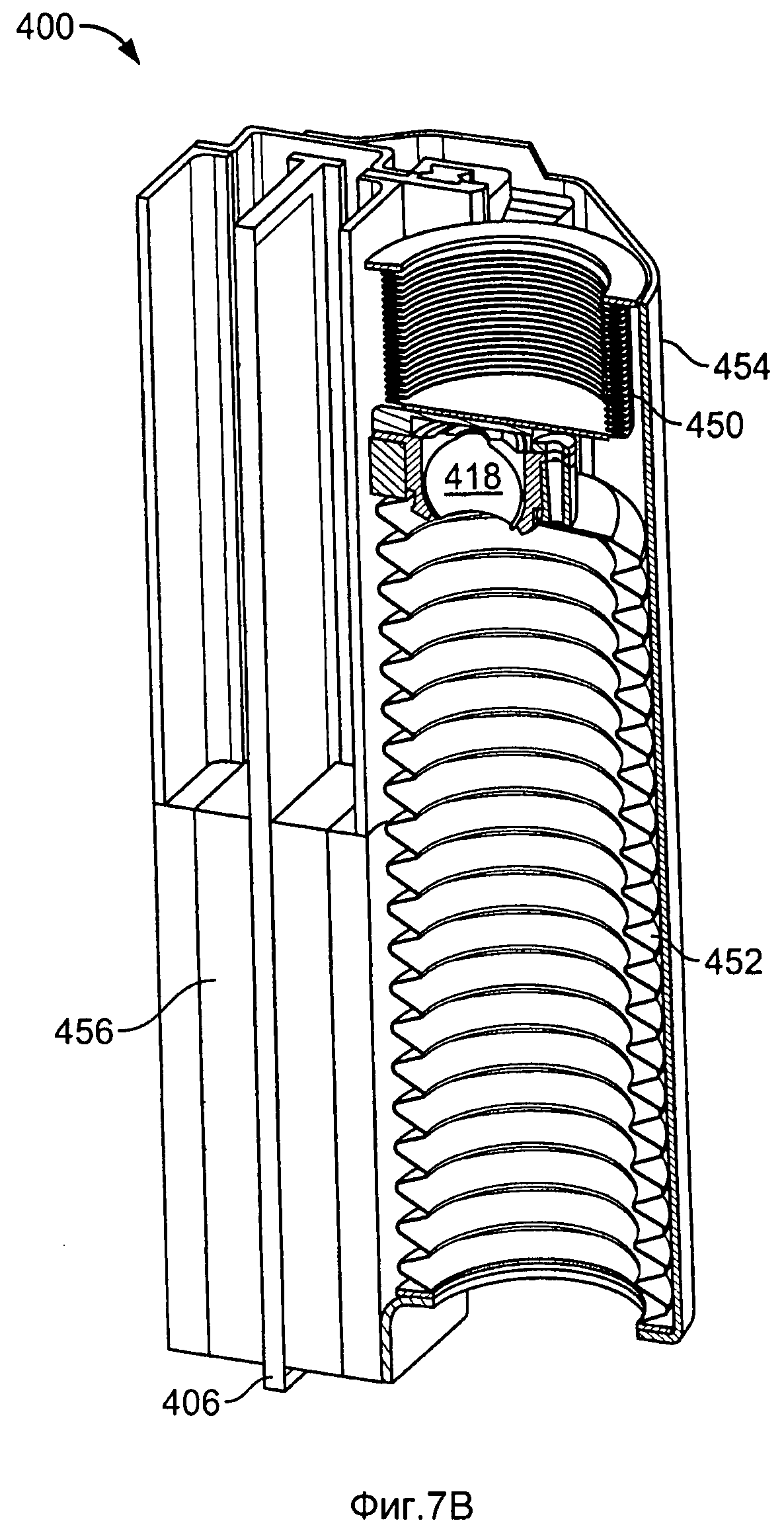
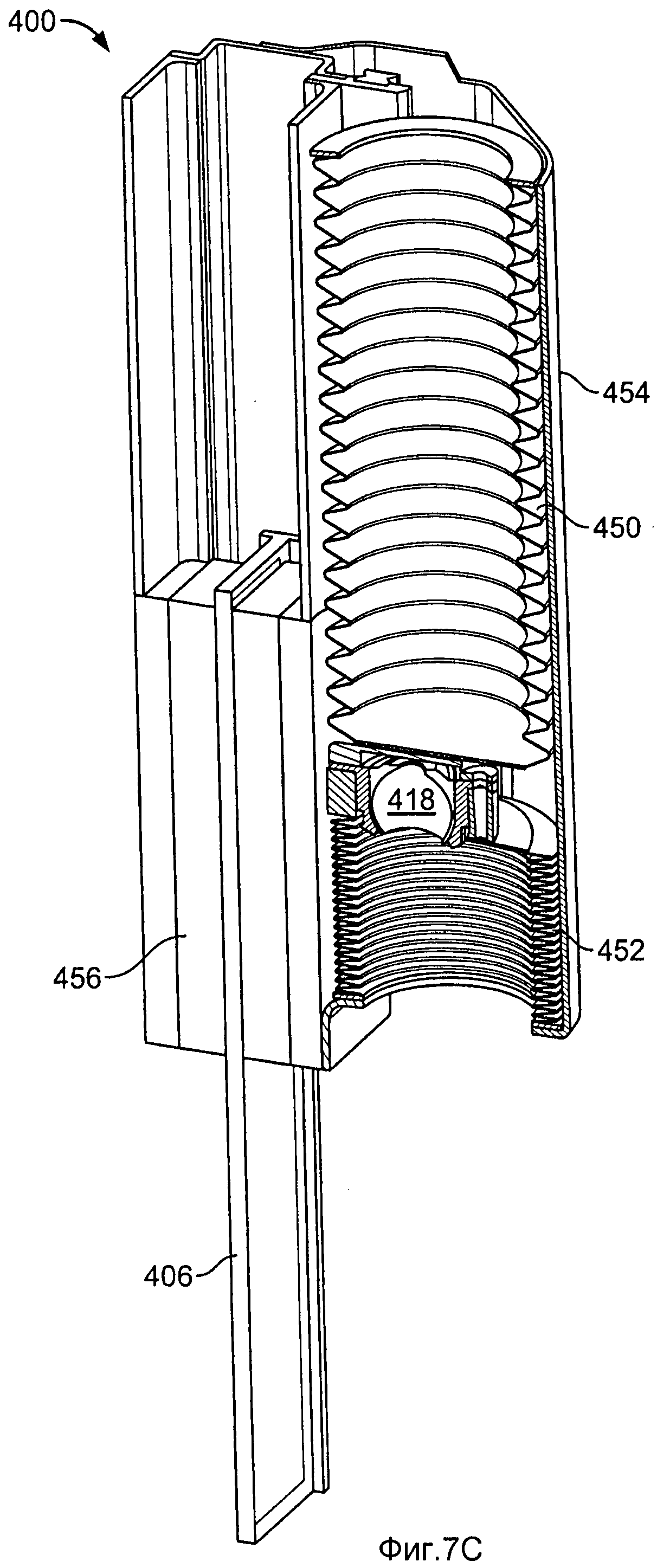
На фиг.7А, фиг.7 В и фиг.7С показано движение пары гофров 450, 452 электромагнитного привода 400, показанного на фиг.6. Каждый из гофров 450, 452 может быть, по существу, окружен защитным рукавом 454. Защитный рукав 454 защищает каждый из гофров 450, 452 от окружающей среды. Корпус 456 окружает и защищает статор 408 и якорь 406.
На Фиг.7А показан пример, в котором якорь 406 привода 400 находится в нейтральном или центральном положении. Гнездо 418, которое принимает шаровой шарнир, также находится в центральном положении. Каждый из пары гофров 450, 452 показан в полусжатом состоянии. В одном варианте осуществления изобретения пара гофров 450, 452 изолирована от окружающей среды, причем они сообщаются друг с другом. Таким образом, воздух может циркулировать между гофрами 450, 452. Обмен воздуха может регулировать давление внутри каждого из гофров 450, 452 при работе, таким образом, предотвращая повреждение давлением одного или обоих гофров 450, 452. В одном варианте осуществления изобретения в каретке 416 могут находиться отверстия для воздуха, допускающие прохождение воздуха между двумя гофрами 450, 452.
На фиг.7 В показан пример, в котором якорь 406 привода 400 находится в самом верхнем положении. Гнездо 418 также находится в самом верхнем положении. Первый гофр 250 показан в полностью сжатом состоянии, а второй гофр 252 показан в растянутом состоянии.
На фиг.7С показан пример, в котором якорь 406 привода 400 находится в самом низком положении. Гнездо 418 также находится в самом низком положении. Первый гофр 250 показан в растянутом состоянии, а второй гофр 252 показан в полностью сжатом состоянии.
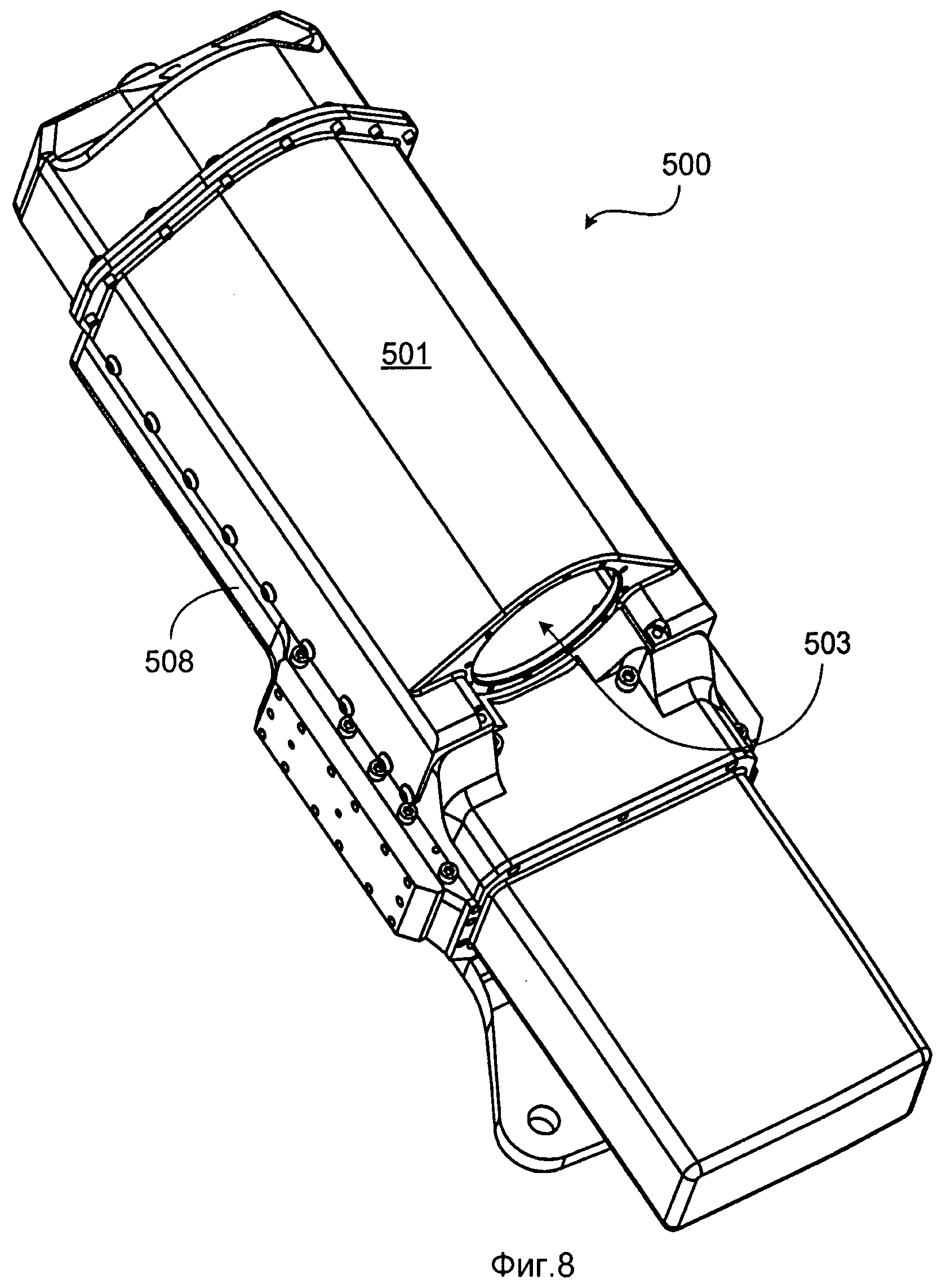
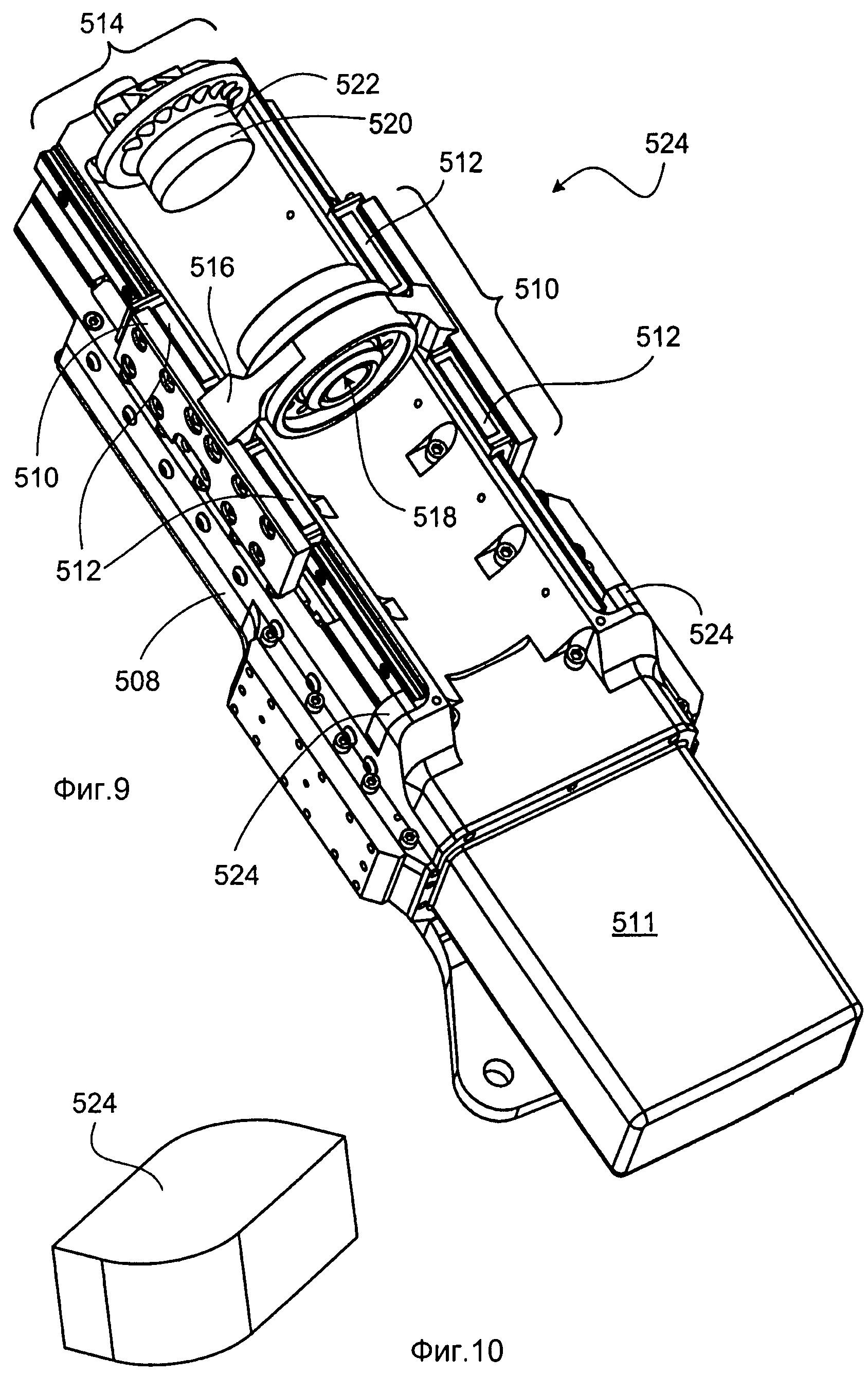
На фиг.8 показан электромагнитный привод 500, соответствующий другому варианту осуществления изобретения. Электромагнитный привод 500 показан с полностью установленной на ее место частью 501 корпуса. Отверстие 503 в части 501 корпуса допускает движение шарового шарнира и частей тяги управления (не показанных, но подобных указанным выше элементам 232 и 238) внутри части корпуса. Статор 508 жестко прикреплен к раме транспортного средства. Статор 508 также может быть прикреплен к раме при помощи вкладыша.
На фиг.9 показан привод 500 с частью 501 корпуса, удаленной для облегчения видения внутренних частей привода. Привод 500 представляет собой привод с двумя опорами, подобный варианту осуществления изобретения, показанному на фиг.6. Для удерживания нагрузок на подвеску используется опорная система 510. Например, опорная система 510 может предотвращать передачу якорю (не показан), по существу, всех нагрузок в повороте и разрывных нагрузок, воздействующих на систему подвески. Якорь подобен якорю, показанному на фиг.6, и он движется внутри части 511 корпуса. Опорная система 510 включает в себя опорные ползуны 512, которые движутся на опорных направляющих 514. Опорные направляющие 514 жестко установлены на статоре 508, который в целом установлен на раме транспортного средства.
Каретка 516 механически соединена с опорными ползунами 512. Каретка 516 выполнена с гнездом, которое предназначено для размещения шарового шарнира. Шаровой шарнир прикреплен к верхней части тяги управления, такой как тяга 232 управления, показанная на фиг.2. В одном варианте осуществления изобретения в верхней части тяги управления может использоваться втулка (не показана) вместо шарового шарнира. В этом варианте осуществления изобретения гнездо 518 предназначено для размещения втулки.
Верхний механический стопор 520 ограничивает движение каретки 516 и якоря в направлении стопора 520 (в первом направлении). В этом варианте осуществления изобретения стопор 520 имеет круглую форму и диаметр около 37 мм. Стопор 520 прикреплен к основанию 522, например, при помощи клейкого вещества. Основание 522 опосредованно прикреплено к статору при помощи одного или более промежуточных компонентов системы подвески. В альтернативном варианте, основание 522 может быть непосредственно прикреплено к статору. Нижние механические стопоры 524 ограничивают движение каретки 516 в направлении стопоров 524 (во втором направлении, по существу, противоположном первому направлению). Стопоры 524 также опосредованно прикреплены к статору при помощи одного или более промежуточных компонентов в системе подвески. В альтернативном варианте стопоры 524 могут быть непосредственно соединены со статором. Стопоры 524 прикреплены, к их соответствующим несущим компонентам, например, при помощи клейкого вещества. На фиг.10 показана одна предпочтительная конфигурация стопора 524. В этом варианте стопоры 520 и 524, предпочтительно, выполнены из неопренового каучука и имеют толщину от около 10 мм до около 60 мм. Более предпочтительно, стопоры 520 и 524 имеют толщину от около 20 мм до около 50 мм. Более предпочтительно, стопоры 520 и 524 имеют толщину от около 30 мм до около 40 мм. Наиболее предпочтительно, стопоры 520 и 524 имеют толщину около 35 мм.
На фиг.11 показана каретка 516, перемещенная в положение, где соответствующие части 516а и 516b каретки входят в контакт с соответствующими стопорами 524. Это может происходить, например, когда колесо автомобиля попадает в глубокую выбоину. Система работает так, что якорь приводит в действие каретку 516 для перемещения колеса вниз для предотвращения опускания угла транспортного средства. Поскольку стопоры 520 и 524 не прикреплены к якорю, происходит относительное движение между якорем и всеми тремя стопорами 520, 524 при движении якоря.
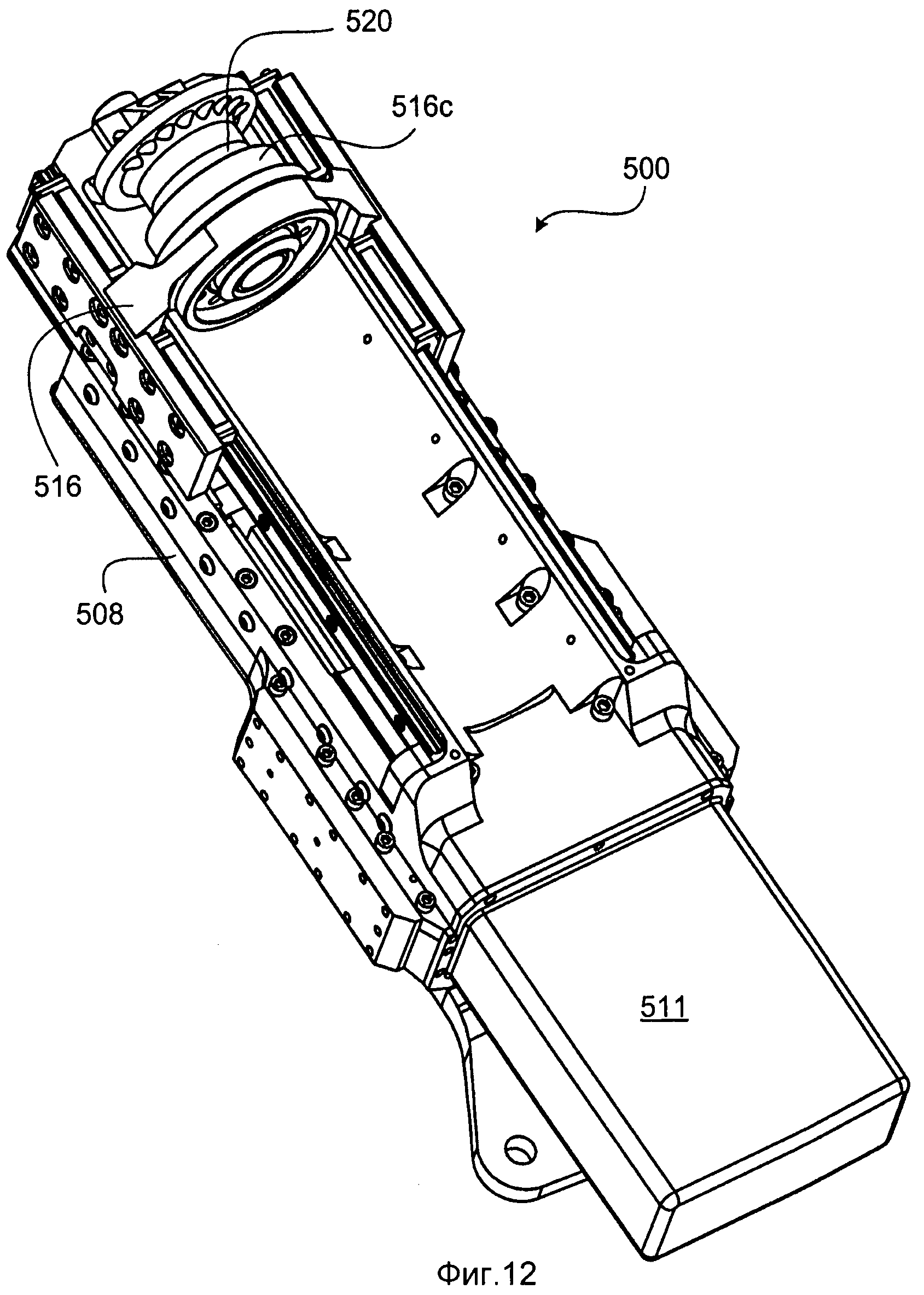
На фиг.12 показана каретка 516, перемещенная в положение, где часть 516 с каретки входит в контакт со стопором 520. Это может происходить, например, когда колесо автомобиля входит в контакт с асфальтовым гребнем поперек проезжей части с избыточной скоростью. Система работает так, что якорь приводит в действие каретку 516 для перемещения колеса вверх для предотвращения подъема угла транспортного средства. Стопор 520 ограничивает движение каретки 516 в направлении стопора 520.
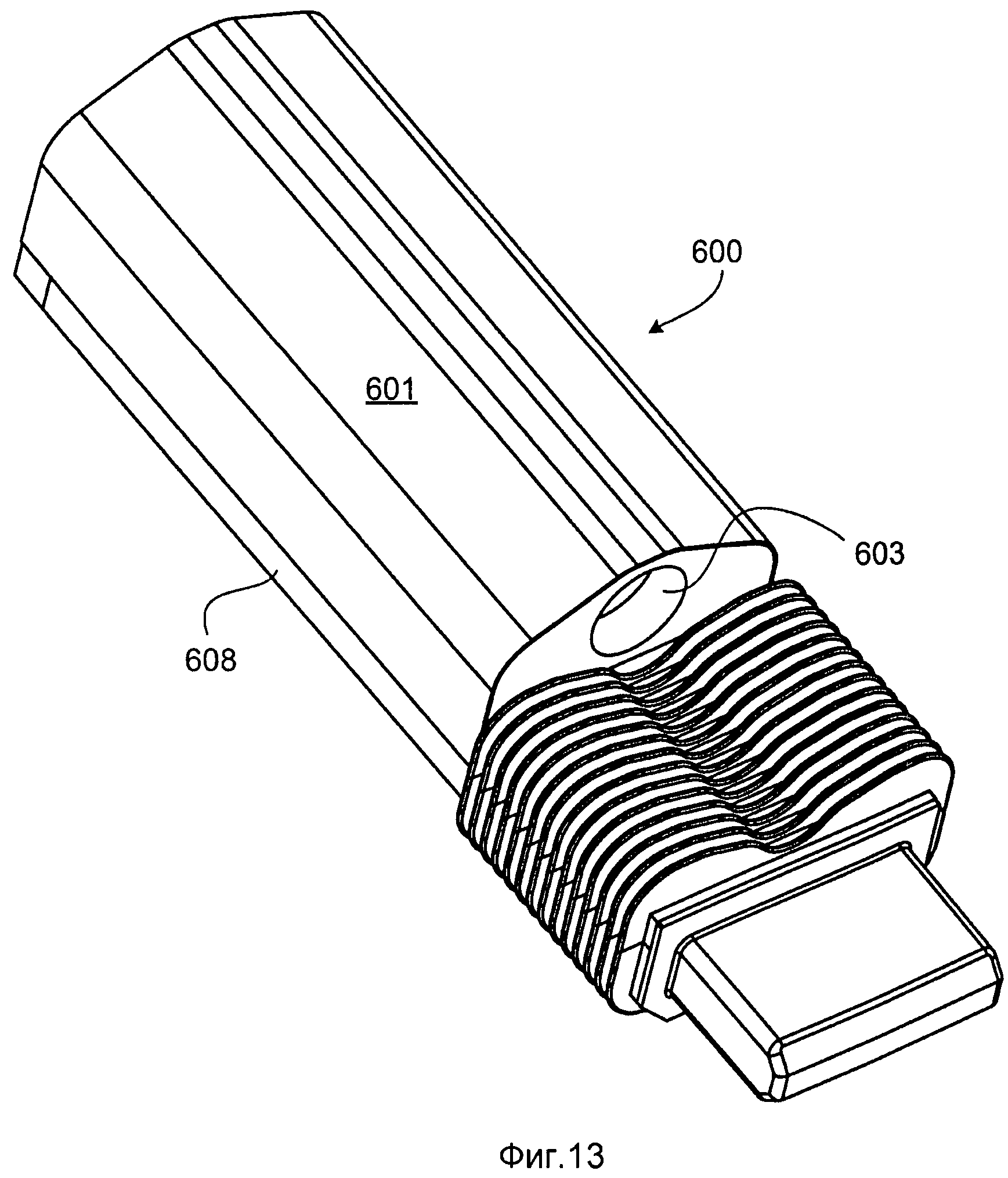
На фиг.13 показан электромагнитный привод 600, соответствующий другому варианту осуществления изобретения.
Электромагнитный привод 600 показан с полностью установленной на место частью 601 корпуса. Отверстие 603 в части 601 корпуса допускает движение шарового шарнира и частей тяги управления (не показанных, но подобных указанным выше элементам 232 и 238) внутри части корпуса. Статор 608 жестко прикреплен к раме транспортного средства. Статор 608 также может быть прикреплен к раме при помощи вкладыша.
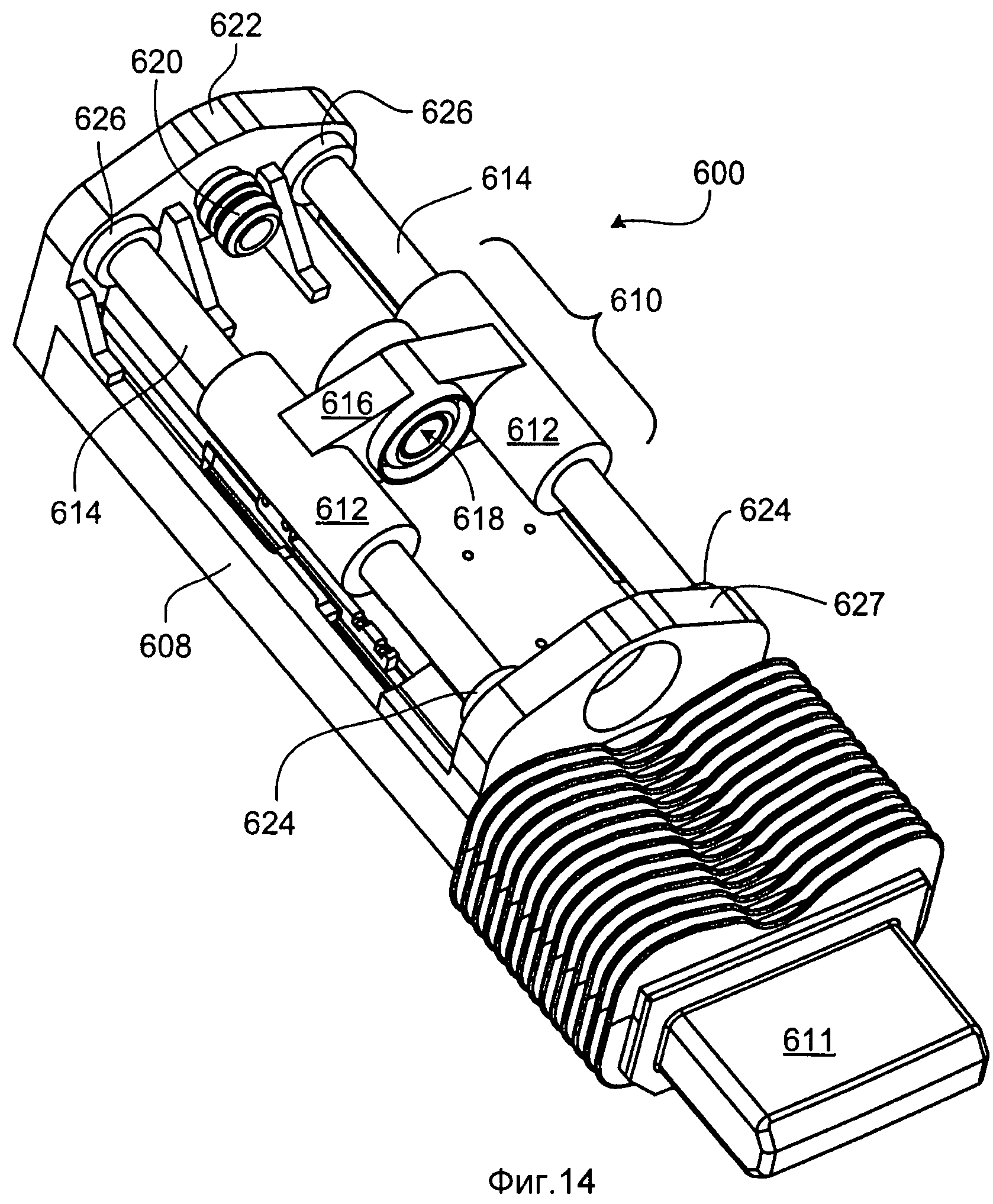
На фиг.14 показан привод 600 с частью 601 корпуса, удаленной для облегчения видения внутренних частей привода. Привод 600 представляет собой привод с двумя опорами, подобный варианту осуществления изобретения, показанному на фиг.6. Для удерживания нагрузок на подвеску используется опорная система 610. Например, опорная система 610 может предотвращать передачу якорю (не показан), по существу, всех нагрузок в повороте и разрывных нагрузок, воздействующих на систему подвески. Якорь подобен якорю, показанному на фиг.6, и он движется внутри части 611 корпуса. Опорная система 610 включает опорные ползуны 612, которые движутся на опорных направляющих 614. Опорные направляющие 614 имеют круглое сечение и жестко установлены на статоре 608, который в целом установлен на раме транспортного средства.
Каретка 616 прикреплена к опорным ползунам 612. Каретка 616 выполнена с гнездом 618, которое предназначено для размещения шарового шарнира. Шаровой шарнир прикреплен к верхней части тяги управления, такой как тяга 232 управления, показанная на фиг.2. В одном варианте осуществления изобретения в верхней части тяги управления может использоваться втулка (не показана) вместо шарового шарнира. В этом варианте осуществления изобретения гнездо 618 предназначено для размещения втулки.
Как показано на фиг.14 и 15, верхний механический стопор 620 ограничивает движение каретки 616 в направлении стопора 620. В этом варианте осуществления изобретения стопор 620 имеет круглое сечение. Часть 621 стопора 620 имеет меньшее сечение, чем другие части стопора. В этом случае часть 621 имеет конфигурацию канавки, проходящей по всей окружности стопора 620. Часть 621 позволяет стопору 620 первоначально создавать относительно малую силу сопротивления, когда каретка 616 входит в контакт со стопором 620. Когда каретка прилагает большую силу к стопору 620, стопор начинает частично складываться в направлении движения каретки. Это приводит к движению части 623 стопора к части 625 стопора. Когда части 623 и 625 входят в контакт друг с другом, сила сопротивления дальнейшему движению каретки 616, создаваемая стопором 620, существенно возрастает. В этом варианте осуществления изобретения стопор 620 отформован на суппорте 622, который опосредованно прикреплен к статору 608 при помощи одного или более промежуточных компонентов. В альтернативном варианте суппорт 622 может быть прикреплен непосредственно к статору. В другом варианте осуществления изобретения стопор 620 изготовляют отдельно и затем прикрепляют к суппорту 622.
Как показано на фиг.14 и 16, нижние механические стопоры 624 ограничивают движение каретки 616 в направлении стопоров 624. Каждый стопор 624 охватывает соответствующую опорную направляющую 614. Каждый стопор 624 также включает в себя выполненную как единое целое с ним изоляционную втулку 625, которая удерживает конец одной из опорных направляющих 614. По части ее длины во втулку 625 проходит отверстие 627 в стопоре 624. Каждая втулка 625 помещена в отверстие (не показано) в пластине 627. Каждый стопор 624 с составляющей с ним единое целое втулкой прикреплен к пластине 627, например, при помощи клейкого вещества. В этом варианте осуществления изобретения стопоры 620 и 624, предпочтительно, выполнены из каучука EPDM (этиленпропилендиеновый мономер). Каждый стопор 624 (не учитывая втулки 625) имеет толщину около 9,5 мм.
Пара опор 626 удерживает соответствующие концы опорных направляющих 614. Каждая опора, предпочтительно, имеет, по существу, одинаковую форму и выполнена из такого же материала, как и механические стопоры 624. Опоры 626 не работают в качестве механических стопоров, поскольку эту функцию выполняет механический стопор 620. Поскольку в этом варианте осуществления изобретения стопоры 624 и опоры 626 выполнены из каучука EPDM, опорные направляющие 614 могут плавать в результате того, что каучук будет сжиматься под нагрузкой. Другими словами, каждая опора 626 и втулка 625 (также называемая опорой) позволяет концу опорной направляющей перемещаться из исходного положения, когда к опорной направляющей прилагается сила. Опора возвращает конец опорной направляющей в исходное положение, когда приложение силы к опорной направляющей прекращается. Этот признак дает допуск для разных отношений теплового расширения, а также для разных механических допусков и дает устойчивость к отклонению вследствие воздействия внешних сил, например, от нагрузок на подвеску.
На фиг.17 показана каретка 616, перемещенная якорем в положение, где ползуны 612 входят в контакт с соответствующими стопорами 624. Это может происходить, например, когда колесо автомобиля попадает в глубокую выбоину. Система работает так, что якорь приводит в действие каретку 616 для перемещения колеса вниз для предотвращения опускания угла транспортного средства. Стопоры 624 ограничивают движение каретки 616 в направлении стопоров 624 при помощи ползунов 612, которые входят в контакт со стопорами 624.
На фиг.18 показана каретка 616, перемещенная якорем в положение, где часть 617 каретки входит в контакт со стопором 620. Это может происходить, например, когда колесо автомобиля входит в контакт с асфальтовым гребнем поперек проезжей части с избыточной скоростью. Система работает так, что якорь приводит в действие каретку 616 для перемещения колеса вверх для предотвращения подъема угла транспортного средства. Стопор 620 ограничивает движение каретки 616 в направлении стопора 620.
Стопоры 520, 524, 620 и 624 могут быть выполнены из различных термореактивных или термопластических полимерных эластомеров. Полимерный эластомер может представлять собой плотную или ячеистую пену. Термореактивные полимерные эластомеры включают, например, EPDM, неопрен, нитриловый каучук, полиуретан, кремнийорганический каучук, натуральный каучук и SBR (стиролбутадиеновый каучук) и фторуглероды. Термопластические полимерные эластомеры включают динамически вулканизированные эластомеры.
На фиг.19 показана диаграмма жесткости для предпочтительного варианта выполнения механического стопора. Эта диаграмма представляет отклонение (сжатие) механического стопора и результирующую силу, создаваемую стопором вследствие отклонения. Другим признаком, который предпочтителен для материала механического стопора, является отсутствие остаточной деформации при сжатии. Остаточной деформацией при сжатии является величина деформации (выраженная в процентном отношении к первоначальным размерам), которую сохраняет материал после устранения сжимающего напряжения.
Хотя изобретение было подробно раскрыто и описано со ссылками на конкретные примерные варианты его осуществления, понятно, что специалисты в данной области техники могут теперь применить множество модификаций и вариантов использования описанных здесь конкретных устройств и технических приемов и отходить от них. Следовательно, изобретение следует толковать как включающее любой и новый признак, и новую комбинацию признаков, представленных описанными здесь устройством и способом, и ограниченное только сущностью и объемом прилагаемой формулы изобретения.
Реферат
Изобретение относится к области автомобилестроения. Активная система подвески для транспортного средства содержит активный элемент подвески, включающий статор и якорь. Статор закреплен на кузове транспортного средства. Якорь имеет магнитную связь со статором и выполнен с возможностью вертикального перемещения по первой опорной системе. При этом якорь имеет жесткую связь с кареткой, которая перемещается по второй опорной системе. Каретка соединена тягой управления с колесом транспортного средства. Вторая опорная система воспринимает нагрузки, возникающие при боковых и продольных колебаниях колеса. Достигается исключение воздействия указанных нагрузок со стороны колеса на активный элемент подвески. 11 н. и 67 з.п. ф-лы, 23 ил.
Формула
активный элемент подвески, который по существу жестко прикреплен к раме транспортного средства для того, чтобы по существу исключить механическую связь движения якоря активного элемента подвески с боковым перемещением колеса транспортного средства; и
тягу управления, которая прикреплена между якорем активного элемента подвески и колесом транспортного средства, причем первый конец тяги управления прикреплен к якорю активного элемента подвески с помощью шарового шарнира или втулки.
прикрепляют активный элемент подвески к раме транспортного средства для того, чтобы по существу исключить связь движения якоря активного элемента подвески с боковым перемещением колеса транспортного средства; и
прикрепляют тягу управления между якорем активного элемента подвески и колесом транспортного средства, причем первый конец тяги управления прикрепляют к якорю активного элемента подвески с помощью шарового шарнира или втулки.
линейный электромагнитный привод, содержащий статор и якорь, который выполнен с возможностью перемещения относительно статора, причем статор по существу жестко прикреплен к раме транспортного средства; и тягу управления, имеющую первый конец, прикрепленный к якорю, и имеющую второй конец, прикрепленный к колесу транспортного средства таким образом, что движение якоря вызывает движение колеса транспортного средства относительно рамы транспортного средства, при этом первый конец тяги управления прикреплен к якорю активного элемента подвески с помощью шарового шарнира или втулки.
прикрепляют статор линейного электромагнитного привода к раме транспортного средства, при этом шасси транспортного средства прикреплено к раме;
прикрепляют первый конец тяги управления к якорю линейного электромагнитного привода, причем якорь выполнен подвижным относительно статора; и
прикрепляют второй конец тяги управления к колесу транспортного средства таким образом, что движение якоря вызывает движение колеса транспортного средства относительно рамы транспортного средства.
статор;
якорь, имеющий магнитную связь со статором;
первую опорную систему, механически соединенную с якорем, причем первая опорная система поддерживает воздушный зазор между якорем и статором; и
вторую опорную систему, механически соединенную со статором, причем вторая опорная система поглощает изгибающие нагрузки, относящиеся к подвеске, тем самым минимизируя изгибающие нагрузки на якорь, относящиеся к подвеске,
каретку, механически соединенную с первой опорной системой таким образом, что каретка перемещается относительно первой опоры.
статор;
якорь, имеющий магнитную связь со статором, причем якорь выполнен подвижным относительно статора;
корпус, окружающий статор и якорь, причем огибающая корпуса остается зафиксированной независимо от положения якоря относительно статора;
тягу управления, имеющую первый конец, прикрепленный к якорю, и имеющую второй конец, прикрепленный к колесу транспортного средства таким образом, что движение якоря вызывает движение колеса транспортного средства относительно рамы транспортного средства.
линейный электромагнитный привод, содержащий статор и якорь, который выполнен с возможностью перемещения относительно статора, причем статор по существу жестко прикреплен к раме транспортного средства; и
контроллер, имеющий электрическую связь с линейным электромагнитным приводом посредством одного или более неизгибающихся кабелей.
статор;
якорь, имеющий магнитную связь со статором, причем якорь выполнен подвижным относительно статора;
корпус, окружающий статор и якорь; и
первый механический стопор, расположенный в корпусе, причем имеет место относительное перемещение между якорем и стопором, когда якорь движется, при этом стопор ограничивает перемещение якоря в первом направлении.
статор;
якорь, имеющий магнитную связь со статором, причем якорь выполнен подвижным относительно статора;
корпус, окружающий статор и якорь; и
механический стопор, расположенный в корпусе, причем механический стопор выполнен из материала, включающего полимерный эластомер.
статор;
якорь, имеющий магнитную связь со статором, причем якорь выполнен подвижным относительно статора;
корпус, окружающий статор и якорь; и
механический стопор, расположенный в корпусе, причем механический стопор имеет толщину от 10 мм до 60 мм.
статор;
якорь, имеющий магнитную связь со статором, причем якорь выполнен подвижным относительно статора;
первую опорную направляющую, которая направляет движение якоря; и
первую опору для удерживания первого конца опорной направляющей, причем опора обеспечивает перемещение первого конца опорной направляющей из первого исходного положения, когда к опорной направляющей прилагается первая сила, и опора возвращает первый конец опорной направляющей в исходное положение, когда прекращается приложение силы к первой опорной направляющей.
вторую опорную направляющую, которая направляет движение якоря; и третью опору для удерживания первого конца второй опорной направляющей, причем третья опора обеспечивает перемещение первого конца второй опорной направляющей из третьего исходного положения, когда ко второй опорной направляющей прилагается вторая сила, и третья опора возвращает первый конец второй опорной направляющей в третье исходное положение, когда прекращается приложение второй силы ко второй опорной направляющей.
Комментарии