Мускулолет (варианты) - RU2786028C1
Код документа: RU2786028C1
Чертежи










Описание
Изобретение относится к области авиации, а именно к летательным аппаратам, приводимым в действие мускульной силой человека и может быть использовано для преодоления расстояний по воздуху.
Известно решение RU 64175 U1 "Автожир-мопед", МПК В64С 27/00, содержащее силовую установку с толкающим винтом, несущий винт с втулкой, позволяющей менять общий шаг лопастей, систему раскрутки несущего винта, шасси выполненное в виде велосипеда. Задняя втулка велосипеда соединена с валом силовой установки. К раме велосипеда, в области располагаемой за сиденьем пилота, крепятся две стойки шасси, которые служат двумя дополнительными точками опоры. Для поездки по земле лопасти винтов снимаются и укладываются под сиденье, двигатель переключается на вращение втулки заднего колеса велосипеда.
Недостатком этого технического решения является сложная конструкция автожира вследствие наличия системы раскрутки несущего винта, возможности изменения шага лопастей несущего винта, низкая аэродинамическая эффективность толкающего винта вследствие воздействия на него воздушного потока от несущего винта, трудное управление автожиром вследствие плохой компенсации реактивных моментов воздействующих на автожир во время полета из-за низкой аэродинамической эффективности толкающего винта, отсутствие возможности привода толкающего и несущего винтов в движение мускульной силой человека, а также поддержание полета за счет мускульной силы человека. (RU 64175 U1, http://new.fips.ru).
Известно решение SU 1804413 A3 "Летательный аппарат с мускульным приводом", МПК В64С 31/04, В64В 1/32, содержащее трубчатую раму, закрепленное на ней сидение пилота, педальный механизм, вращающий с помощью цепной передачи двухпропеллерный движитель, поддерживающий дискообразный баллон из газонепроницаемого материала, заполненный летучим газом.
Недостатком этого технического решения является сложная конструкция аппарата из-за наличия возможности наклона плоскости вращения несущих пропеллеров, трудное управление и плохая маневренность аппарата вследствие того, что при изменении угла наклона плоскости вращения несущих пропеллеров во время их работы, они будут противодействовать этому изменению, что заставит пользователя аппарата прикладывать постоянное усилие для сохранения измененного положения плоскости вращения несущих пропеллеров, отсутствие возможности привода несущих пропеллеров в движение силовой установкой, а также ее использование для поддержания полета. (SU 1804413 A3, http://new.fips.ru).
Из известных технических решений наиболее близким по технической сущности к заявляемому объекту является решение RU 12102 U1 "Летательный аппарат", МПК В64С 30/00, содержащее надувную оболочку, выполненную в виде аэродинамической несущей поверхности. Аэродинамическая поверхность имеет форму треугольного в плане крыла. Надувная оболочка закреплена на соединительной раме, имеющей шасси. В передней части рамы размещен механизм управления летательным аппаратом. В задней части рамы расположен толкающий воздушный винт, а в средней части рамы имеется сиденье пилота и механический привод воздушного винта. Механический привод выполнен в виде мускульного педального цепного механизма, который состоит из педалей, шестеренчатой передачи и цепной передачи, соединенной с осью воздушного винта. Шасси выполнено в виде трехколесной конструкции, у которой переднее колесо является управляемым, а задние колеса опорные неуправляемые. Надувная оболочка состоит из основной передней секции, создающей подъемную силу, задней средней секции, выполняющей роль руля высоты и двух боковых задних секций, выполняющих роль элеронов. Надувная оболочка выполнена из мягкой воздухонепроницаемой ткани, например, из композитной пленки. Задние надувные секции оболочки присоединены к передней секции гибкими связями, выполненными из того же материала, что и вся оболочка. Надувная оболочка соединена с рамой стойками и штангой и может иметь металлические вставки обеспечивающие дополнительную жесткость конструкции. Механизм управления летательным аппаратом состоит из руля управления, который связан с передним колесом, элеронами и рулем высоты. Руль управления соединен с вилкой переднего колеса, а через управляемую штангу, качалку элеронов с тягами элеронов, и элеронами. Руль управления через рычаг руля высоты, вертикальную тягу, качалку руля высоты и тяги соединен с рулем высоты. Надувная аэродинамическая оболочка, имеющая форму крыла снабжена силовым основанием. К основанию крепятся стойки, управляемая штанга, а также элементы управления летательным аппаратом, в том числе качалки. На силовом основании расположен штуцер заправки надувной оболочки, и в том числе задних секций, воздухом. Для обеспечения формы профиля крыла, надувная аэродинамическая оболочка может иметь внутри мягкие нервюры, а для создания прочности, носовая и консольные части надувной оболочки соединяются тросовыми растяжками с соединительной рамой и с осью задних колес. Летательный аппарат может иметь легкую обтекаемую кабину пилота. На переднем шасси предусматривается установка ручного тормоза.
Недостатком этого технического решения является сложная конструкция летательного аппарата вследствие наличия многорычажного механизма управления, плохая компенсация реактивных моментов толкающего воздушного винта, воздействующих на аппарат во время полета, что ухудшает его маневренность, отсутствие возможности привода толкающего воздушного винта в движение силовой установкой, а также ее использование для поддержания полета (RU 12102 U1, http://new.fips.ru),
Задача, на которую направлено заявленное решение во всех вариантах исполнения, это разработка мускулолета простой и надежной конструкции с низкими энергозатратами на привод движителей в движение пилотом, обладающего высокой маневренностью и аэродинамической эффективностью.
Сущность изобретения
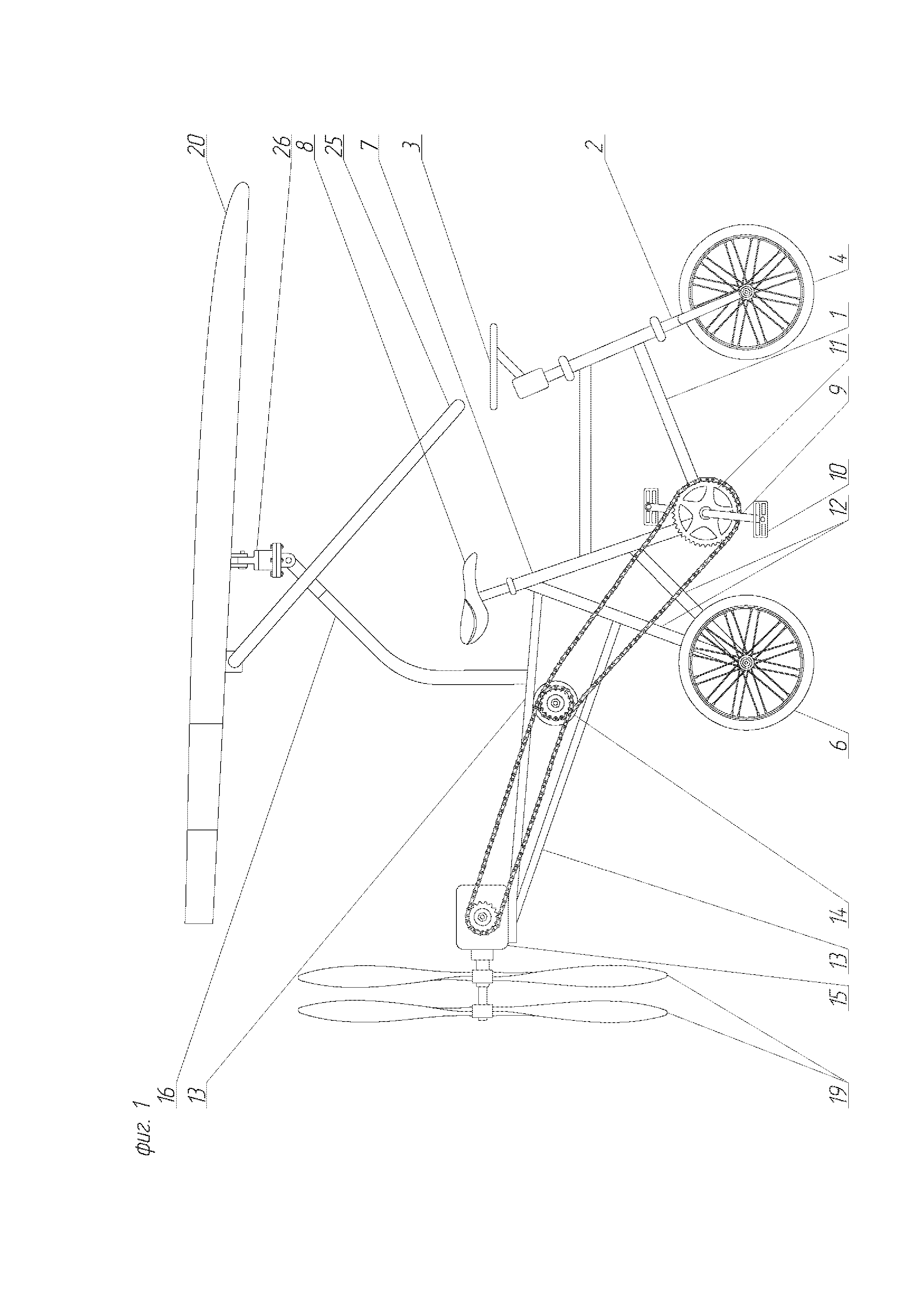
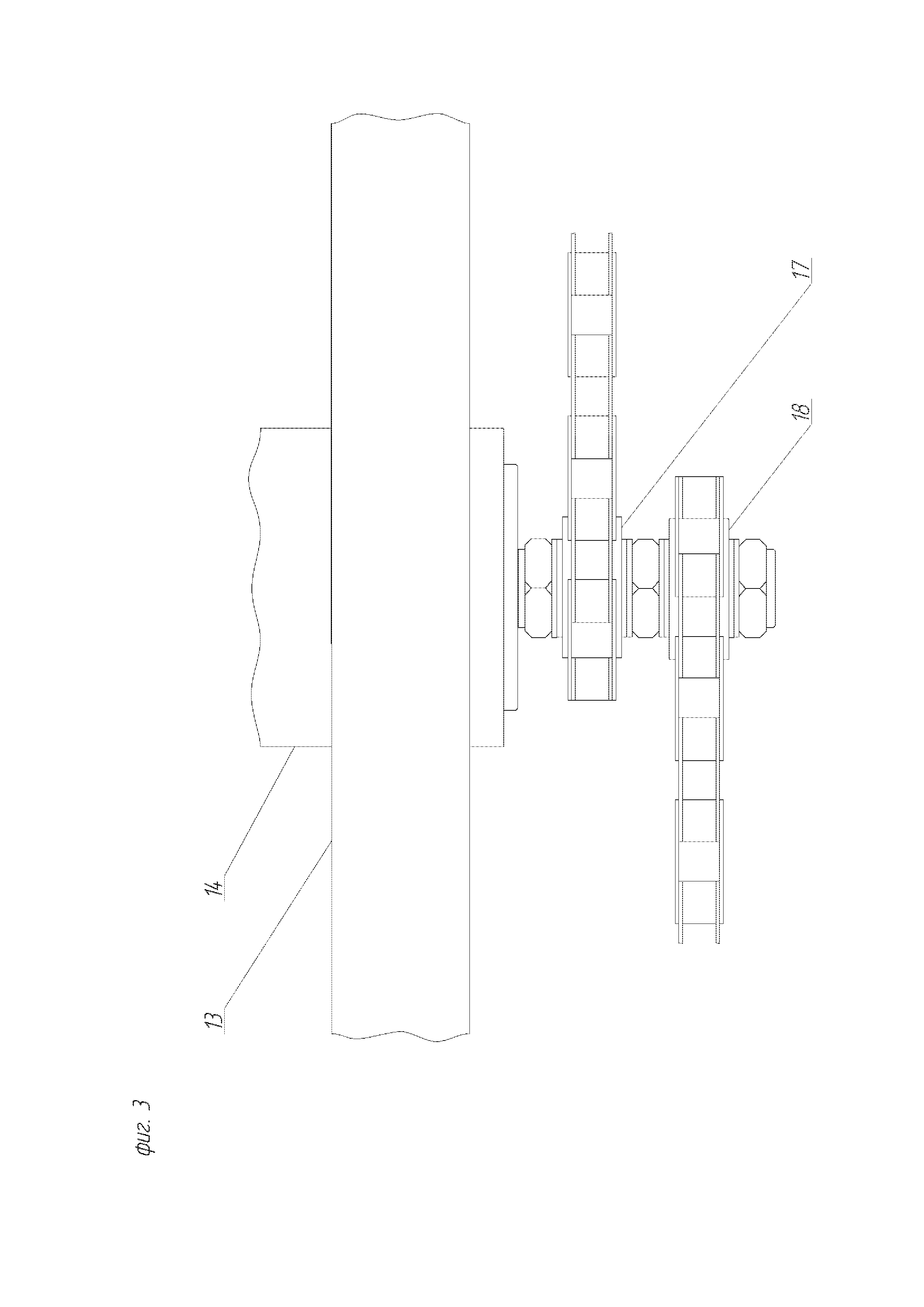
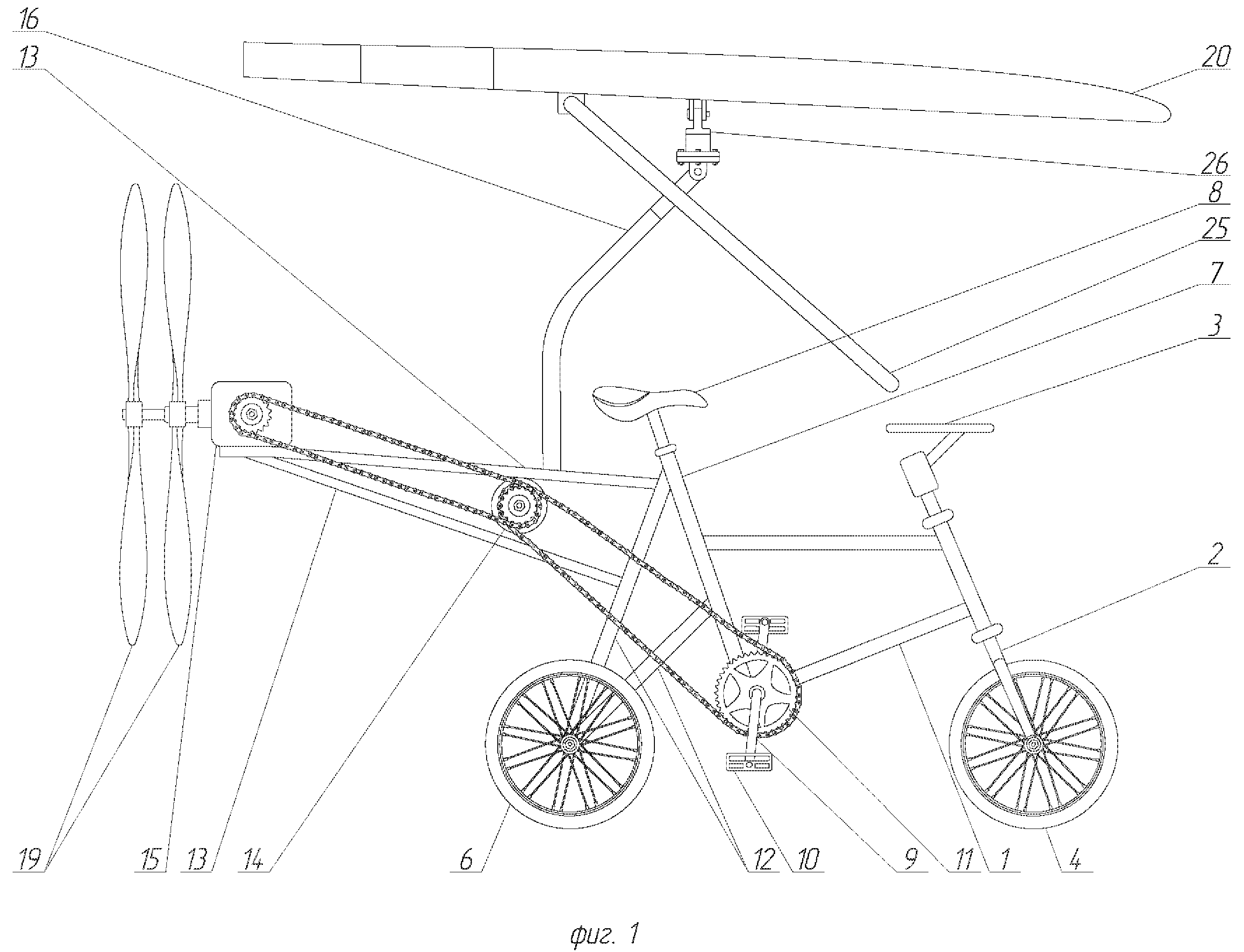
В первом варианте исполнения поставленная задача решается за счет того, что мускулолет имеет расположенный на кронштейнах (13) фиг. 1, 2, сопряженных с кронбалками (12), электродвигатель (14), на выходном валу которого расположены обгонная муфта (17) фиг. 3, внешняя обойма которой соединена гибкой связью с зубчатым колесом (11) фиг. 1 расположенным на оси передней каретки, и зубчатое колесо (18) фиг. 3, соединенное гибкой связью с ведущим валом редуктора (15) фиг. 1, 2, имеющим полнотелый ведомый вал с охватывающим его пустотелым ведомым валом, каждый из которых соединен с воздушным винтом (19), имеющим соосное расположение относительно другого воздушного винта (19) и вращающимся синхронно в противоположном от его направлении. Один конец стойки (16) крыла (20) мускулолета сопряжен с кронштейном (13), а другой подвижно соединен с узлом подвеса (26) крыла (20), имеющим две степени свободы. Крыло (20) мускулолета имеет рулевую трапецию (25).
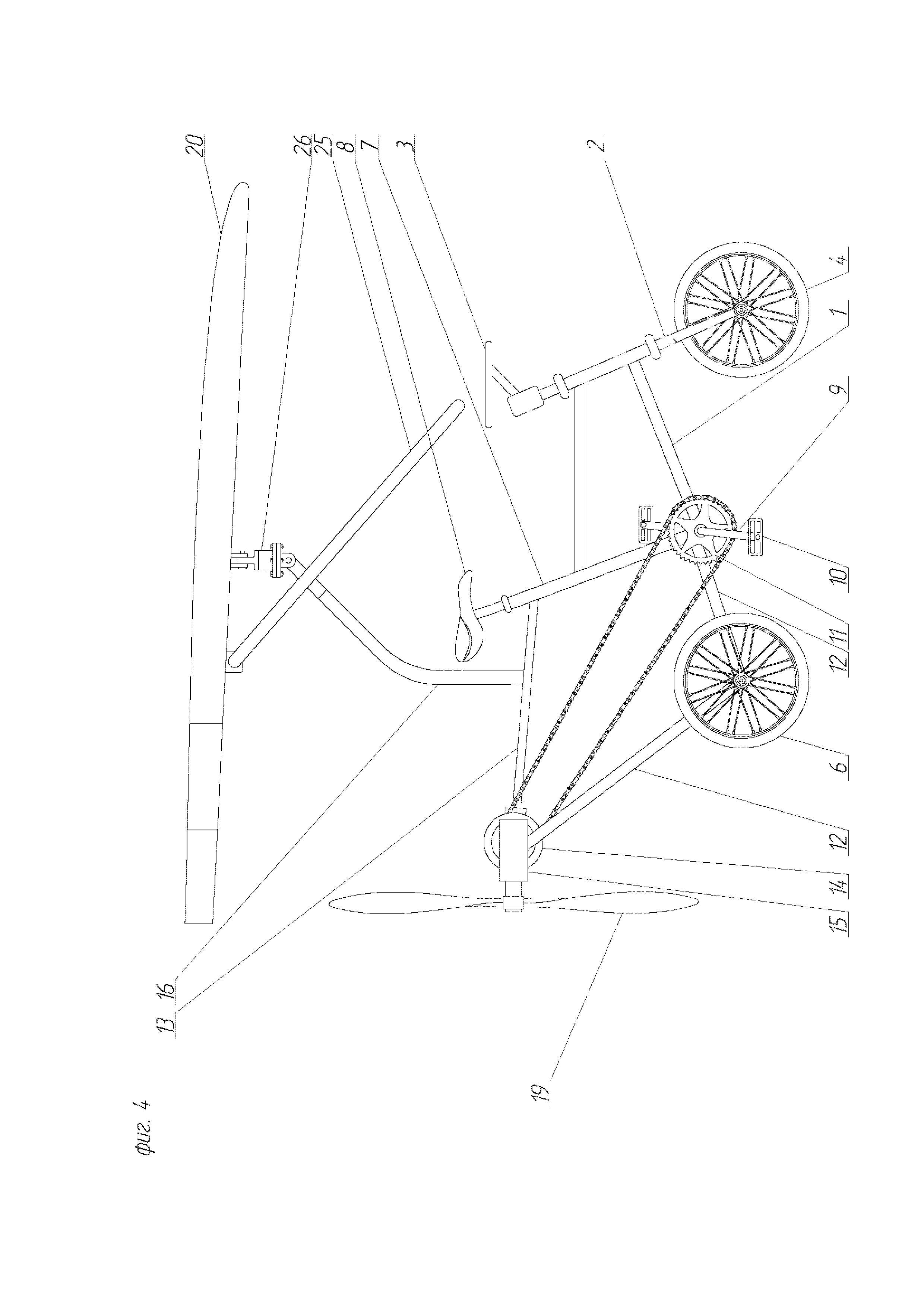
Во втором варианте исполнения поставленная задача решается за счет того, что мускулолет имеет хвостовую балку (21) фиг. 5, расположенную параллельно заднему мосту (5), которая сопряжена с задним мостом (5) и подседельной трубой (7) фиг. 4 кронбалками (12), содержащую два соосно расположенных трубчатых кожуха (22) фиг. 5, соединенные одним концом с корпусом электродвигателя (14), расположенным на кронштейне (13), имеющим два соосно расположенных выходных вала, а другим с корпусом редуктора (15), имеющим ведущий и ведомый валы, оси которых пересекаются. Во внутреннем пространстве каждый кожух (22) фиг. 6 имеет полуось (23), сопряженную одним концом с соосно расположенным выходным валом электродвигателя (14), а другим с соосно расположенным ведущим валом редуктора (15) фиг. 5, ведомый вал которого соединен с воздушным винтом (19), имеющим поперечное расположение относительно другого воздушного винта (19) и вращающимся синхронно в противоположном от его направлении. На одной из двух полуосей (23) фиг. 6 расположена обгонная муфта (24), внешняя обойма которой имеет зубчатое колесо, соединенное гибкой связью с зубчатым колесом (11) фиг. 4, расположенным на оси передней каретки. Задние колеса (6) фиг. 5, соединенные подвижно с задним мостом (5), имеют отрицательный угол развала. Один конец стойки (16) фиг. 4 крыла (20) мускулолета сопряжен с кронштейном (13), а другой подвижно соединен с узлом подвеса (26) крыла (20), имеющим две степени свободы. Крыло (20) мускулолета имеет рулевую трапецию (25).
В третьем варианте исполнения поставленная задача решается за счет того, что мускулолет содержит задний стакан (29) фиг. 9 с кареткой, расположенный на кронштейне (13), ось которой с одного конца имеет кассету (30) фиг. 7, соединенную гибкой связью с зубчатым колесом (11), расположенным на оси передней каретки, а с противоположного конца водило (31), шарнирно связанное с шатуном (33), подвижно сопряженным с хвостовой лопастью (27), соединенной шарнирно с опорами (28), расположенными на заднем мосту (5) фиг. 5 мускулолета. Кассета (30) фиг. 7 имеет устройство перемещения гибкой связи, соединяющей кассету (30) с зубчатым колесом (11) между зубчатыми колесами блока кассеты (30), которое содержит блок управления, расположенный на руле (3) мускулолета. Один конец стойки (16) крыла (20) мускулолета сопряжен с подседельной трубой (7), а другой подвижно соединен с узлом подвеса (26) крыла (20), имеющим две степени свободы. Крыло (20) мускулолета имеет рулевую трапецию (25).
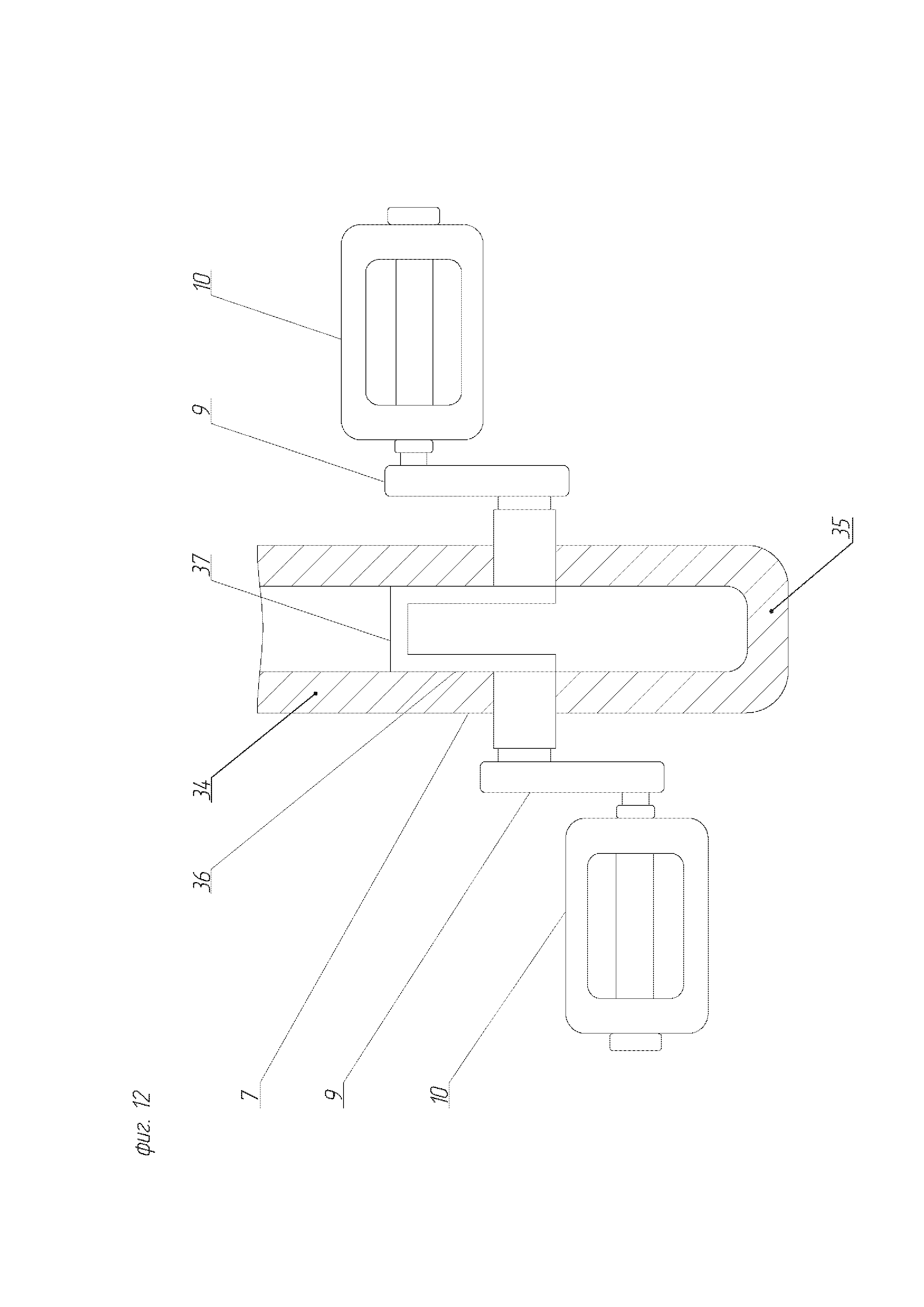
В четвертом варианте исполнения поставленная задача решается за счет того, что подседельная труба (7) фиг. 12 состоит из двух прямолинейных элементов (34), расположенных на расстоянии друг от друга, соединенных между собой дугообразными элементами (35), и в нижней части имеет коленчатый вал (36), каждый конец которого сопряжен с кривошипом (9), соединенным с педалью (10), опирающийся на подшипники расположенные в прямолинейных элементах (34) подседельной трубы (7). Шейка (37) коленчатого вала (36) шарнирно соединена с тягой (38) фиг. 10, имеющей на одном из концов кулисный камень (39), расположенный в прорезе кулисы (40), шарнирно соединенной с хвостовой лопастью (27). Кулиса (40) имеет возможность фиксации камня (39) в прорезе кулисы (40) в зависимости от требуемого угла отклонения лопасти (27) относительно продольной горизонтальной оси мускулолета с возможностью вращения камня (39) вокруг своей оси. Один конец стойки (16) крыла (20) мускулолета сопряжен с подседельной трубой (7), а другой подвижно соединен с узлом подвеса (26) крыла (20), имеющим две степени свободы. Крыло (20) мускулолета имеет рулевую трапецию (25). Мускулолет в частном случае исполнения имеет актуатор, расположенный на поверхности кулисы (40), шток которого подвижно соединен с концом тяги (38), имеющим кулисный камень (39), содержащий блок управления расположенный на руле (3).
Во всех вариантах исполнения мускулолет содержит раму (1) фиг. 1, 2, 4, 5, 7, 8, 10, 11, один конец которой подвижно соединен с рулевой вилкой (2). Рулевая вилка (2) имеет руль (3) и шарнирно соединена с передним колесом (4). На противоположном конце от рулевой вилки (2) рама (1) имеет задний мост (5) фиг. 2, 5, шарнирно соединенный с задними колесами (6). Между рулевой вилкой (2) и задним мостом (5) рама (1) имеет подседельную трубу (7) фиг. 1, 4, 7, 10, в верхней части которой расположено сиденье (8).
В первом варианте исполнения рама (1) фиг. 1 мускулолета имеет кронбалки (12), соединяющие задний мост (5) фиг. 2 с подседельной трубой (7) фиг. 1. Такое исполнение увеличивает жесткость рамы (1) мускулолета, а также добавляет возможность крепления навесного оборудования. В нижней части подседельная труба (7) фиг. 1 сопряжена с передним кареточным стаканом, в котором расположена каретка, имеющая на своей оси с противоположных сторон кривошип (9), соединенный с педалью (10), а также с одной стороны на оси каретки расположено зубчатое колесо (11). Кронбалки (12) сопряжены с кронштейнами (13), на которых расположены электродвигатель (14), редуктор (15), стойка крыла (16). Электродвигатель (14) соединен с аккумуляторной батареей и имеет блок управления (на чертежах не показаны), расположенный на руле (3). На выходном валу электродвигателя (14) фиг. 3 расположены обгонная муфта (17) и зубчатое колесо (18). Наличие обгонной муфты (17), внешняя обойма которой соединена гибкой связью с зубчатым колесом (11) фиг. 1, расположенным на оси передней каретки, на выходном валу электродвигателя (14) фиг. 3, предотвращает передачу крутящего момента от электродвигателя (14) фиг. 1 на зубчатое колесо (11). Редуктор (15) фиг. 1, 2 имеет ведомый вал и охватывающим его пустотелым ведомым валом, каждый из которых соединен с воздушным винтом (19). Воздушные винты (19) расположены соосно относительно друг друга и вращаются синхронно в противоположных направлениях. Такое исполнение воздушных винтов (19) компенсирует их реактивные моменты, что упрощает пилотирование, а также повышает маневренность и аэродинамическую эффективность мускулолета. Ведущий вал редуктора (15) фиг. 1, 2 воздушных винтов (19) соединен гибкой связью с зубчатым колесом (18) фиг. 3, расположенным на выходном валу электродвигателя (14), а внешняя обойма обгонной муфты (17) фиг. 3, расположенной на выходном валу электродвигателя (14), соединена гибкой связью с зубчатым колесом (11) фиг. 1, находящимся на оси передней каретки. Такое исполнение позволяет передавать крутящий момент на воздушные винты (19) фиг. 1 от зубчатого колеса (11), расположенного на оси передней каретки, приводимого в движение мускульной силой пилота или от зубчатого колеса (18) фиг. 3, расположенного на выходном валу электродвигателя (14) при его работе, тем самым обеспечивая возможность привода воздушных винтов (19) фиг. 1 в движение силовой установкой или мускульной силой пилота. Оси ведущего и ведомого валов редуктора (15) пересекаются. В качестве гибкой связи используется цепь или ремень. Противоположный кронштейну (13) фиг. 1 конец стойки (16) шарнирно сопряжен с узлом подвеса крыла (26) фиг. 13, имеющим две степени свободы. Крыло (20) фиг. 1, 14 состоит из силового каркаса, обтянутого мягкой синтетической тканью, и соединено шарнирно с узлом подвеса (26) фиг. 1, а также имеет рулевую трапецию (25).
Во втором варианте исполнения мускулолет имеет хвостовую балку (21) фиг 5, расположенную параллельно заднему мосту (5) и сопряженную с задним мостом (5) и подседельной трубой (7) фиг. 4 кронбалками (12). Такое исполнение увеличивает жесткость рамы (1) фиг. 4 мускулолета, а также добавляет возможность крепления навесного оборудования. В нижней части подседельная труба (7) сопряжена с передним кареточным стаканом, в котором расположена каретка, имеющая на своей оси с противоположных сторон кривошип (9), соединенный с педалью (10), а также с одной стороны на оси каретки расположено зубчатое колесо (11). Задние колеса (6) фиг. 5, соединенные шарнирно с задним мостом (5), имеют отрицательный угол развала. Такое исполнение обеспечивает большее пятно контакта колес (6) с дорожным покрытием, а следовательно лучшее сцепление, что повышает маневренность мускулолета. На кронштейне (13) фиг. 4, соединяющим хвостовую балку (21) с подседельной трубой (7), расположена стойка крыла (16) мускулолета. Противоположный кронштейну (13) конец стойки (16) шарнирно сопряжен с узлом подвеса крыла (26) фиг. 13, имеющим две степени свободы. Крыло (20) фиг. 4, 14 состоит из силового каркаса, обтянутого мягкой синтетической тканью, и соединено шарнирно с узлом подвеса (26), а также имеет рулевую трапецию (25) фиг. 4. Хвостовая балка (21) фиг. 5 содержит два соосно расположенных трубчатых кожуха (22), соединенные одним концом с корпусом электродвигателя (14). Электродвигатель (14) имеет два соосно расположенных выходных вала и соединен с аккумуляторной батареей и блоком управления (на чертежах не показаны), расположенным на руле (3). Во внутреннем пространстве каждый кожух (22) фиг. 6 имеет полуось (23), которая сопряжена одним концом с соосно расположенным выходным валом электродвигателя (14). С противоположного от электродвигателя (14) фиг. 5 конца каждый трубчатый кожух (22) сопряжен с корпусом редуктора (15), а полуось (23) фиг. 6, в каждом трубчатом кожухе (22) фиг. 5, соединена противоположным от выходного вала электродвигателя (14) концом с ведущим валом редуктора (15). На ведомом валу редукторов (15) расположен воздушный винт (19). Оси ведущего и ведомого валов редуктора (15) пересекаются. Воздушные винты (19) фиг. 5 имеют поперечное расположение и вращаются в противоположных друг к другу направлениях. Такое исполнение воздушных винтов (19) уравновешивает их реактивные моменты, образуя аэродинамическую симметрию, исключая взаимное влияние воздушных потоков винтов (19), что упрощает пилотирование, а также повышает маневренность и аэродинамическую эффективность мускулолета. На одной из двух полуосей (23) фиг. 6 расположена обгонная муфта (24), внешняя обойма которой имеет зубчатое колесо. В месте расположения обгонной муфты с зубчатым колесом (24) трубчатый кожух (22) на боковой поверхности имеет отверстие, через которое зубчатое колесо, расположенное на внешней обойме обгонной муфты (24), соединено гибкой связью с зубчатым колесом (11) фиг. 4, расположенным на оси передней каретки. Такое исполнение позволяет передавать крутящий момент на воздушные винты (19) фиг. 4 от зубчатого колеса (11), расположенного на оси передней каретки, приводимого в движение мускульной силой пилота или от электродвигателя (14) при его работе, тем самым обеспечивая возможность привода воздушных винтов (19) в движение силовой установкой или мускульной силой пилота. В качестве гибкой связи используется цепь или ремень.
В третьем варианте исполнения мускулолет имеет хвостовую лопасть (27) фиг. 7, шарнирно соединенную с опорами (28), расположенными на заднем мосту (5) фиг. 5. Задний мост (5) соединен кронбалками (12) фиг. 7 с подседельной трубой (7). Такое исполнение увеличивает жесткость рамы (1) фиг. 7 мускулолета, а также добавляет возможность крепления навесного оборудования. В нижней части подседельная труба (7) сопряжена с передним кареточным стаканом, в котором расположена каретка, имеющая на своей оси с противоположных сторон кривошип (9), соединенный с педалью (10), а также с одной стороны на оси каретки расположено зубчатое колесо (11). Кронбалки (12) соединены с кронштейном (13), на котором расположен задний стакан (29) фиг. 9 с кареткой. Один конец оси задней каретки сопряжен с кассетой (30), а противоположный конец имеет водило (31). Кассета (30) фиг. 7 содержит блок зубчатых колес и соединена гибкой связью с зубчатым колесом (11), расположенным на оси передней каретки. В качестве гибкой связи используется цепь или ремень. Кассета (30) имеет устройство перемещения гибкой связи, соединяющей кассету (30) с зубчатым колесом (11) между зубчатыми колесами блока кассеты (30). Такое исполнение позволяет изменять угловую скорость водила (31), крутящий момент, передаваемый зубчатым колесом (11), частоту колебания лопасти (27). Устройство перемещения гибкой связи содержит блок управления, расположенный на руле (3). Водило (31) фиг. 7 выполнено в виде диска с центральным осевым отверстием для его расположения на оси задней каретки, а также имеет отверстия (32), расположенные по окружности для соединения водила (31) с шатуном (33). Шатун (33) одним концом подвижно сопряжен с лопастью (27), а другим концом подвижно соединен с водилом (31). Подседельная труба (7) содержит стойку крыла (16), которая шарнирно сопряжена с узлом подвеса (26) фиг. 13, имеющим две степени свободы. Крыло (20) фиг. 7, 14 состоит из силового каркаса, обтянутого мягкой синтетической тканью, и соединено шарнирно с узлом подвеса (26), а также имеет рулевую трапецию (25) фиг. 7.
В четвертом варианте исполнения мускулолет имеет хвостовую лопасть (27) фиг. 10, шарнирно соединенную с опорами (28), расположенными на заднем мосту (5) фиг. 5. Задний мост (5) соединен кронбалками (12) фиг. 10 с подседельной трубой (7). Такое исполнение увеличивает жесткость рамы (1) фиг. 10 мускулолета, а также добавляет возможность крепления навесного оборудования. Подседельная труба (7) фиг. 12 состоит из двух прямолинейных элементов (34), расположенных на расстоянии друг от друга, соединенных между собой дугообразными элементами (35). В нижней части подседельная труба (7) имеет коленчатый вал (36), опирающийся на подшипники, расположенные в прямолинейных элементах (34) подседельной трубы (7). С обоих концов коленчатый вал (36) сопряжен с кривошипом (9), соединенным с педалью (10). Шейка (37) коленчатого вала (36) шарнирно соединена с тягой (38) фиг. 10, имеющей на одном из концов кулисный камень (39), расположенный в прорезе кулисы (40), шарнирно соединенной с хвостовой лопастью (27). Кулиса (40) имеет возможность фиксации камня (39) в прорезе кулисы (40) в зависимости от требуемого угла отклонения лопасти (27) относительно продольной горизонтальной оси мускулолета с возможностью вращения камня (39) вокруг своей оси. Такое исполнение позволяет изменять амплитуду колебания хвостовой лопасти (27) за счет регулирования длины хода кулисы (40), тем самым регулируя тягу и подъемную силу движителя. В частном случае исполнения на поверхности кулисы (40) расположен актуатор (на чертежах не показан), шток которого подвижно соединен с концом тяги (38), имеющим кулисный камень (39). Такое исполнение позволяет изменять амплитуду колебания хвостовой лопасти (27) за счет регулирования длины хода кулисы (40). Блок управления актуатором (на чертежах не показан) расположен на руле (3). Подседельная труба (7) фиг. 10 содержит стойку крыла (16), которая шарнирно сопряжена с узлом подвеса (26) фиг. 13, имеющим две степени свободы. Крыло (20) фиг. 10, 14 состоит из силового каркаса, обтянутого мягкой синтетической тканью, и соединено шарнирно с узлом подвеса (26), а также имеет рулевую трапецию (25) фиг. 10.
Технический результат заявленного решения во всех вариантах исполнения заключается в возможности совершать на мускулолете полет с низкими энергозатратами на привод движителя в движение пилотом за счет того, что привод движителей в виде воздушных винтов в движение осуществляется силовой установкой или мускульной силой пилота, а привод движителя в виде машущей хвостовой лопасти в движение осуществляется с возможностью изменения передаваемого на движитель крутящего момента, в высокой маневренности и аэродинамической эффективности за счет компенсации реактивных моментов движителей в виде воздушных винтов и изменении подъемной силы и тяги у движителя в виде машущей хвостовой лопасти.
Краткое описание чертежей:
на фиг. 1 - схематичное изображение мускулолета в первом варианте исполнения. Вид сбоку;
на фиг. 2 - схематичное изображение мускулолета в первом варианте исполнения. Вид сверху;
на фиг. 3 - схематичное изображение обгонной муфты и зубчатого колеса на выходном валу электродвигателя мускулолета в первом варианте исполнения. Вид сверху;
на фиг. 4 - схематичное изображение мускулолета во втором варианте исполнения. Вид сбоку;
на фиг. 5 - схематичное изображение мускулолета во втором варианте исполнения. Вид сверху;
на фиг. 6 - схематичное изображение обгонной муфты с зубчатым колесом на полуоси мускулолета во втором варианте исполнения. Вид сверху;
на фиг. 7 - схематичное изображение мускулолета в третьем варианте исполнения. Вид сбоку;
на фиг. 8 - схематичное изображение мускулолета в третьем варианте исполнения. Вид сверху;
на фиг. 9 - схематичное изображение заднего стакана с кареткой имеющей на одном конце кассету, а на противоположном конце водило в третьем варианте исполнения мускулолета. Общий вид;
на фиг. 10 - схематичное изображение мускулолета в четвертом варианте исполнения. Вид сбоку;
на фиг. 11 - схематичное изображение мускулолета в четвертом варианте исполнения. Вид сверху;
на фиг. 12 - схематичное изображение подседельной трубы с коленчатым валом, сопряженным с обоих концов с кривошипом, соединенным с педалью в четвертом варианте исполнения мускулолета. Поперечный разрез;
на фиг. 13 - схематичное изображение узла подвеса крыла мускулолета во всех вариантах исполнения. Общий вид;
на фиг. 14 - схематичное изображение крыла мускулолета во всех вариантах исполнения. Вид сверху;
Краткое описание конструктивных элементов:
1 - рама;
2 - рулевая вилка;
3 - руль;
4 - переднее колесо;
5 - задний мост;
6 - заднее колесо;
7 - подседельная труба;
8 - сиденье;
9 - кривошип;
10 - педаль;
11 - зубчатое колесо передней каретки;
12 - кронбалка;
13 - кронштейн;
14 - электродвигатель;
15 - редуктор;
16 - стойка крыла;
17 - обгонная муфта;
18 - зубчатое колесо вала электродвигателя;
19 - воздушный винт;
20 - крыло;
21 - хвостовая балка;
22 - кожух;
23 - полуось;
24 - обгонная муфта с зубчатым колесом;
25 - рулевая трапеция;
26 - узел подвеса крыла;
27 - хвостовая лопасть;
28 - опора;
29 - задний кареточный стакан;
30 - кассета;
31 - водило;
32 - отверстие;
33 - шатун;
34 - прямолинейный элемент подседельной трубы;
35 - дугообразный элемент подседельной трубы;
36 - коленчатый вал;
37 - шейка коленчатого вала;
38 - тяга;
39 - кулисный камень;
40 - кулиса;
Осуществление заявленного решения:
Заявленное решение в первом варианте исполнения работает следующим образом.
Пилот усаживается на сиденье (8) фиг, 1 мускулолета, и с помощью блока управления, расположенного на руле (3), запускает электродвигатель (14), Крутящий момент с зубчатого колеса (18) фиг, 3, расположенного на выходном валу электродвигателя (14), через гибкую связь передается на ведущий вал редуктора (15) фиг. 1, 2, приводя в движение ведомые валы редуктора (15), каждый из которых соединен с воздушным винтом (19). Воздушные винты (19) приходят во вращение и создают толкающее усилие, в результате чего мускулолет начинает движение по взлетно-посадочной полосе. Для управления траекторией движения мускулолета по взлетно-посадочной полосе пилот использует руль (3), поворачивая переднее колесо (4). При достижении необходимой для взлета скорости пилот воздействует на рулевую трапецию (25) фиг. 1, изменяя угол атаки крыла (20) фиг. 1, 14 относительно его продольной оси, что обеспечивает взлет мускулолета. В режиме установившегося горизонтального полета пилот с помощью блока управления выключает электродвигатель (14) фиг. 1 и начинает вращать мышечной силой зубчатое колесо (11), расположенное на оси передней каретки, используя педали (10), соединенные с кривошипами (9), которые сопряжены с осью передней каретки для поддержания толкающего усилия, создаваемого воздушными винтами (19). Крутящий момент с зубчатого колеса (11), расположенного на оси передней каретки, через гибкую связь передается на обгонную муфту (17) фиг. 3, расположенную на выходном валу электродвигателя (14), приводя зубчатое колесо (18) на выходном валу электродвигателя (14) во вращение. Далее крутящий момент с зубчатого колеса (18) фиг. 3 на выходном валу электродвигателя (14) через гибкую связь передается на ведущий вал редуктора (15) фиг. 1, приводя в движение ведомые валы редуктора (15), каждый из которых соединен с воздушным винтом (19). Для изменения направления полета пилот воздействует на рулевую трапецию (25) фиг. 1, поворачивая крыло (20) фиг. 1, 14 вокруг продольной оси мускулолета в требуемую сторону, тем самым создавая крен для захода мускулолета в маневр изменения траектории движения. При приближении к взлетно-посадочной полосе пилот сбрасывает скорость движения, выравнивает крыло (20) фиг. 1 с помощью рулевой трапеции (25) и осуществляет посадку. После приземления, при необходимости, пилот с помощью блока управления включает электродвигатель (14) фиг. 1 и продолжает движение до места стоянки под действием тягового усилия воздушных винтов (19).
Заявленное решение во втором варианте исполнения работает следующим образом.
Пилот усаживается на сиденье (8) фиг. 4 мускулолета, и с помощью блока управления расположенного на руле (3) запускает электродвигатель (14). Крутящий момент с соосно расположенных выходных валов электродвигателя (14) фиг. 5 через полуоси (23) фиг. 6 передается на ведущие валы редукторов (15) фиг. 5, приводя в движение ведомые валы редукторов (15), соединенные с воздушным винтом (19). Воздушные винты (19) приходят во вращение и создают толкающее усилие, в результате чего мускулолет начинает движение по взлетно-посадочной полосе. Для управления траекторией движения мускулолета по взлетно-посадочной полосе пилот использует руль (3), поворачивая переднее колесо (4). При достижении необходимой для взлета скорости пилот воздействует на рулевую трапецию (25) фиг. 4, изменяя угол атаки крыла (20) фиг. 4, 14 относительно его продольной оси, что обеспечивает взлет мускулолета. В режиме установившегося горизонтального полета пилот с помощью блока управления выключает электродвигатель (14) фиг. 4 и начинает вращать мышечной силой зубчатое колесо (11), расположенное на оси передней каретки, используя педали (10), соединенные с кривошипами (9), которые сопряжены с осью передней каретки для поддержания толкающего усилия, создаваемого воздушными винтами (19). Крутящий момент с зубчатого колеса (11) фиг. 4, расположенного на оси передней каретки, через гибкую связь передается на обгонную муфту с зубчатым колесом (24) фиг. 6, расположенную на полуоси (23), приводя выходные соосные валы электродвигателя (14) и соосно расположенную полуось (23) во вращение. Далее крутящий момент с полуосей (23) фиг. 6 передается на ведущие валы редукторов (15) фиг. 5, приводя в движение ведомые валы редукторов (15), соединенные с воздушным винтом (19). Для изменения направления полета пилот воздействует на рулевую трапецию (25) фиг. 4, поворачивая крыло (20) фиг. 4, 14 вокруг продольной оси мускулолета в требуемую сторону, тем самым создавая крен для захода мускулолета в маневр изменения траектории движения. При приближении к взлетно-посадочной полосе пилот сбрасывает скорость движения, выравнивает крыло (20) фиг. 4 с помощью рулевой трапеции (25) и осуществляет посадку. После приземления, при необходимости, пилот с помощью блока управления включает электродвигатель (14) и продолжает движение до места стоянки под действием тягового усилия воздушных винтов (19).
Заявленное решение в третьем варианте исполнения работает следующим образом.
Пилот усаживается на сиденье (8) фиг. 7 мускулолета, и с помощью мышечной силы начинает вращать зубчатое колесо (11), расположенное на оси передней каретки, используя педали (10), соединенные с кривошипами (9), которые сопряжены с осью передней каретки, при этом регулируя крутящий момент, передаваемый с зубчатого колеса (11) на ось задней каретки, используя блок управления устройством перемещения гибкой связи, соединяющей кассету (30) с зубчатым колесом (11) между зубчатыми колесами блока кассеты (30). Крутящий момент с зубчатого колеса (11) через гибкую связь передается на кассету (30), расположенную на оси задней каретки, приводя в движение водило (31), расположенное на противоположном от кассеты (30) конце оси задней каретки. Далее крутящий момент с водила (1) через шатун (33) передается на хвостовую лопасть (27), приводя ее в колебательное движение. Колебательное движение хвостовой лопасти (27) создает подъемную силу, увеличивающуюся с повышением частоты колебания лопасти (27), вектор которой направлен по вертикали. При достижении частоты колебания лопасти (27), необходимой для взлета, мускулолет отрывается от взлетно-посадочной полосы и совершает вертикальный подъем. Достигнув необходимой высоты, пилот воздействует на рулевую трапецию (25), изменяя угол атаки крыла (20) фиг. 7, 14 относительно его продольной оси, что обеспечивает движение мускулолета в горизонтальном направлении. В режиме установившегося горизонтального полета для изменения направления пилот воздействует на рулевую трапецию (25) фиг. 7, поворачивая крыло (20) вокруг продольной оси мускулолета в требуемую сторону, тем самым создавая крен для захода мускулолета в маневр изменения траектории движения. При приближении к взлетно-посадочной полосе пилот уменьшает частоту колебания хвостовой лопасти (27), выравнивает крыло (20) фиг. 7 с помощью рулевой трапеции (25) и осуществляет посадку.
Заявленное решение в четвертом варианте исполнения работает следующим образом.
Пилот при необходимости изменяет амплитуду колебания хвостовой лопасти (27) фиг. 10, фиксируя кулисный камень (39) в прорезе кулисы (40) в зависимости от требуемого угла отклонения лопасти (27) относительно продольной горизонтальной оси мускулолета. Затем усаживается на сиденье (8) мускулолета, и с помощью мышечной силы начинает вращать коленчатый вал (36), расположенный в нижней части подседельной трубы (7), используя педали (10), соединенные с кривошипами (9), которые сопряжены с коленчатым валом (36). Крутящий момент с коленчатого вала (36) через тягу (38) передается на кулису (40), приводя в колебательное движение хвостовую лопасть (27). Колебательное движение хвостовой лопасти (27) создает подъемную силу, увеличивающуюся с повышением частоты колебания лопасти (27), вектор которой направлен по вертикали. При достижении частоты колебания лопасти (27), необходимой для взлета, мускулолет отрывается от взлетно-посадочной полосы и совершает вертикальный подъем. Достигнув необходимой высоты, пилот воздействует на рулевую трапецию (25), изменяя угол атаки крыла (20) фиг. 10, 14 относительно его продольной оси, что обеспечивает движение мускулолета в горизонтальном направлении. В режиме установившегося горизонтального полета для изменения направления движения пилот воздействует на рулевую трапецию (25) фиг. 10, поворачивая крыло (20) вокруг продольной оси мускулолета в требуемую сторону, тем самым создавая крен для захода мускулолета в маневр изменения траектории движения. При приближении к взлетно-посадочной полосе пилот уменьшает частоту колебания хвостовой лопасти (27), выравнивает крыло (20) фиг. 10 с помощью рулевой трапеции (25) и осуществляет посадку.
Заявленное решение в четвертом варианте исполнения в его частном случае работает следующим образом.
Пилот усаживается на сиденье (8) фиг. 10 мускулолета, и при необходимости изменяет амплитуду колебания хвостовой лопасти (27), используя блок управления актуатором, расположенный на руле (3). Шток актуатора, соединенный с концом тяги (38), имеющим кулисный камень (39), совершает линейное движение, перемещая кулисный камень (39) в прорезе кулисы (40) и останавливаясь, фиксирует его в требуемом положении в зависимости от необходимого угла отклонения лопасти (27) относительно продольной горизонтальной оси мускулолета. Затем с помощью мышечной силы пилот начинает вращать коленчатый вал (36), расположенный в нижней части подседельной трубы (7), используя педали (10), соединенные с кривошипами (9), которые сопряжены с коленчатым валом (36). Крутящий момент с коленчатого вала (36) через тягу (38) передается на кулису (40), приводя в колебательное движение хвостовую лопасть (27). Колебательное движение хвостовой лопасти (27) создает подъемную силу, увеличивающуюся с повышением частоты колебания лопасти (27), вектор которой направлен по вертикали. При достижении частоты колебания лопасти (27) необходимой для взлета мускулолет отрывается от взлетно-посадочной полосы и совершает вертикальный подъем. Достигнув необходимой высоты, пилот воздействует на рулевую трапецию (25), изменяя угол атаки крыла (20) фиг. 10, 14 относительно его продольной оси, что обеспечивает движение мускулолета в горизонтальном направлении. В режиме установившегося горизонтального полета для изменения направления движения пилот воздействует на рулевую трапецию (25) фиг. 10, поворачивая крыло (20) вокруг продольной оси мускулолета в требуемую сторону, тем самым создавая крен для захода мускулолета в маневр изменения траектории движения. При приближении к взлетно-посадочной полосе пилот уменьшает частоту колебания хвостовой лопасти (27), выравнивает крыло (20) с помощью рулевой трапеции (25) и осуществляет посадку.
Реферат
Изобретение относится к области авиации, а именно к летательным аппаратам, приводимым в действие мускульной силой человека. Мускулолет включает раму, один конец которой имеет рулевую вилку с рулем, сопряженную с передним колесом, а другой конец имеет задний мост, соединенный с задними колесами, а также содержит подседельную трубу, в верхней части которой расположено сиденье. Крыло имеет рулевую трапецию и сопряжено со стойкой крыла через узел подвеса с двумя степенями свободы. Мускулолет имеет расположенный на кронштейнах, сопряженных с кронбалками, электродвигатель, на выходном валу которого расположены обгонная муфта, внешняя обойма которой соединена гибкой связью с зубчатым колесом, расположенным на оси передней каретки, зубчатое колесо, соединенное гибкой связью с ведущим валом редуктора, имеющим ведомый вал с охватывающим его пустотелым ведомым валом, каждый из которых соединен с соосными воздушными винтами. Обеспечивается снижение энергозатрат на привод движителя в движение пилотом, повышение аэродинамической эффективности за счет компенсации реактивных моментов движителей. 4 н. и 10 з.п. ф-лы, 14 ил.
Комментарии