Сухопутная неразрывная транспортно-энергетическая система - RU2789916C1
Код документа: RU2789916C1
Чертежи











Описание
Изобретение относится к рельсовым транспортным комбинированным высокоскоростным системам, обладающим характеристиками поезда и самолета, и может быть использовано для перевозки пассажиров, экспресс доставки почты, грузов и другого на дальние расстояния.
Известна мировая наземная транспортная система по патенту РФ №2277482, В61В 13/08, B60L 8/00, B60L 13/10, содержащая транспортное средство с вагонами, оборудованными в нижней части ротором линейного двигателя, суперэлектромагнитами и суперпостоянными магнитами, статор линейного двигателя, установленный на сооруженных на трассе опорах и выполненный со сверхпроводниковой обмоткой, охлаждаемой жидким гелием, а также с суперэлектромагнитами и суперпостоянными магнитами, ориентированными полюсами с возможностью создания магнитной подушки, на опорах установлена цельнометаллическая воздухонепроницаемая магистральная труба, в тропической зоне мировой наземной транспортной системы, сверху на гладкой наружной обшивке магистральных труб прикреплены фотоэлектрические силовые установки - солнечные батареи, а вдоль магистральных труб прикреплены перфорированные трубы с подачей продувочного воздуха и промывочной воды для смыва пыли и грязи с солнечных батарей.
Недостатки системы следующие.
1. Транспортная система не регламентировано проходит в Южной Америке, Австралии, Африке исключительно по периметру побережья. По основной территории США путь проходит дважды серпообразно по восточному побережью и не захватывает западного побережья США. По территории Аляски (США) делается первая остановка в городе Анкоридж. Город Анкоридж (Аляска, США) отделен от Берингового пролива горными Хребтами: горы Сьюард, горы Кускокуим, Аляскинский хребет. Потребуется строительство туннелей через горные хребты (более 200 километров), а также туннель под заливом Нортон (43 километра). От города Анкоридж (Аляска, США) транспортная система идет транзитно через гору Логан (Канада) высотой 5956 метров над уровнем моря и далее через горный хребет Кордильер 2236 километров до города Ванкувер (Канада). Нереально технически выполнить, если например: проходить туннели с максимальной скоростью 17 метров в сутки машиной-щитом Herrenknecht, внешним диаметром 19 метров https://www.herrenknecht.com/ru/produkte/productdetail/mixschild, то 2236000 метров пути/17 метров в сутки = 131529 суток/365 дней в году = 360 лет. Таким образом, за 360 лет можно построить тоннельный путь между городом Анкоридж (Аляска, США) до города Ванкувер (Канада) транзитно через гору Логан (Канада).
2. Трасса трубчатая между городом Карачи (Пакистан) до города Стамбул (Турция) составляет 4089 километров через горные хребты: Кухруд, Загрос, Тавр, Понтийские горы. Проходит транзитно через города Исфахан (Иран), Багдад (Ирак), Анкара (Турция). Из 4089 километров этого пути только 700 километров проходит по равнине, а остальной путь через горы: 4089-700=3389 километров. Если, например: туннели через горы протяженностью 3389 километров проходить машиной-щитом Herrenknecht, то 3389000 метров пути/17 метров в сутки = 199353 суток/365 дней в году = 546 лет. Прохождение туннеля от города Карачи (Пакистан) до города Стамбул (Турция) займет 546 лет.
3. На чертеже видно, что толщина стенок двойной цельнометаллической трубы с диаметром 12 метров составит около 100 мм (внешней) и 75 мм (внутренней). Масса одного погонного метра двойной цельнометаллической трубы составит: 2*3,14*6*(0,1+0,075)=6,594 м3*7870 кг/м3=51895 кг. Вес одной готовой двойной трубы длиной 30 метров составит: 51895*30=1556843 кг. Для монтажа такой трубы потребуются особые грузоподъемные устройства. Сварка таких труб будет осложнена, тем, что стык готовой внутренней трубы, можно будет сварить только внутри этой трубы, а стык готовой внешней трубы можно будет сварить только снаружи этой трубы. Общая масса двойной цельнометаллической трубы на всем транспортном пути составит: 51895 кг* (116958000+10850000)=51895*127808000=6632596160000 кг=6632596160 т. Мировое производство стали за год около 1800000000 т.Для изготовления двойной цельнометаллической трубы потребуется мировое производство стали за 6632596160/1800000000=3,6 лет. Также потребуется запуск новых заводов по изготовлению сегментов двойной цельнометаллической трубы диаметром 12 метров. Сложно сваривать сегменты внутренней и внешней трубы диаметром 12 метров. Для эксплуатации этой трубы в качестве пути для скоростной магистрали требуется изготавливать трубы с большой точностью (допусками и посадками), так как нарушение этого может привести к аварии.
4. На европейской территории России транспортная система описывает не попутное кольцо, путь не проходит по многим технически доступным странам, островам и отдельным территориям, которые приоритетно нуждаются в развитии скоростного транспорта: Боливия, Парагвай, Белиз, Лаос, Непал, Гонконг, Афганистан, Таджикистан, Узбекистан, Киргизия, Туркменистан, Казахстан и другие.
5. Используются активные секции статора, состоящие из стальных сердечников и суперэлектромагнитной обмотки, охлаждаемой жидким гелием. Трудоемкость их изготовления велика и сравнима с изготовлением и строительством большого андроногоколлайдера, использующего подобное оборудование. Уложенные в пути активные секции статора требуют регулярное обслуживание во время эксплуатации и сложное управление.
6. Монтаж и изготовление мощных опор возможен только по строительным нормам и правилам (СНИП) для мостов и труб, например: 2.05.03-84. Требования СНИПа следующие: нагрузки и воздействия рассчитываются как постоянные (собственный вес и другие) и временные (горизонтальная нагрузка от центробежной силы, горизонтальные поперечные удары от подвижного состава, горизонтальная продольная нагрузка от торможения и силы тяги, воздействие морозного пучения грунта и другие). Вес двойной цельнометаллической трубы между двумя опорами с чередованием 100 метров 51895 * 100=5189500 кг=5189,5 т, а также вес самих опор. Опоры должны обеспечить устойчивость при разгонах и торможениях до скорости 7,93 км/сек=28548 км/час (10 кратная скорость полета пули, выпущенной из автомата Калашникова). Наибольшее расстояние между остановками от города Касабланка (Марокко) до города Дакар (Сенегал) 2462 километра. Чтобы достичь заявленной скорости 7,93 км/сек=28548 км/час, на середине пути между этими остановками, например за 5 минут необходимо иметь ускорение 27,35 м/сек2 https://matematika-club.ru/uskorenie-skorost-i-peremeshchenie-kalkulyator-onlajn#calc02. Каждая опора должна обеспечивать устойчивость при действующем ускорении 27,35 м/сек2. Ускорение 27,35 м/сек2 испытывает космонавт при взлете космического корабля. Одиночная опора сечением около 150 м2 должна иметь подошву фундамента сечением не менее 5250 м2 для своей устойчивости (не менее чем в 35 раз больше, чем сечение самой опоры). По СНИПу глубина заложения фундамента (подошвы) 30 метров, а также сверху делается насыпка грунта еще 30 метров. Основание опоры в земле 30+30=60 м. Строительство опор еще многократно усложняет, удорожает конструкцию и продолжительно по времени.
7. Система управления движением управляет транспортным средством с вагонами, имеющим скорость 28548 км/час. При этом пассивный ротор линейного электродвигателя находится в нижней части вагонов, а активный статор линейного электродвигателя находится на опорах трассы. Нереально управлять скоростью этого поезда с земли или из кабины по радиоканалу, передавать команды системе управления движением, если выполнение команд для системы управления имеет задержку времени для обработки или выполнения команды. Беспроводной информационный канал также имеет задержку времени при передаче команд и сигналов. Очевидно, что летящее транспортное средство с вагонами со скоростью 10 кратно превышающей скорость полета пули, выпущенной из автомата Калашникова, не будет успевать выправиться на поворотах, и будут происходить механические удары, повышающие вероятность поломки и снижающие надежность конструкции. Активные статорные обмотки линейного электродвигателя будут выполнять уже устаревшие по времени команды. Скорость вагонов часто будет просто произвольная. Все это снижает качество и безопасность поездки.
8. Статор линейного электродвигателя использует сеперэлектромагнитную обмотку, охлаждаемую жидким гелием. С учетом того, что температура жидкого гелия 4,2 К (-268,95°С), то меры предосторожности по работе с жидким гелием требуют его хранение в сосудах Дьюара https://gazzachas.ru/katalog/zapravka-ballonov/sosudy-dyuara/sosudy-dyuara-koreja.html или подобных в сочетании с вакуумной теплоизоляцией. Поддержание температуры -268,95°С жидкого гелия возможно совместно с работой криогенной установки, вблизи каждого супер электромагнита на пути движения транспортного средства. Применение жидкого гелия стоит дорого, что снизит себестоимость строительства и эксплуатации скоростной трассы. Утечка или несанкционированный выход жидкого гелия из трубок охлаждения или сосуда Дьюара может привести к мгновенной хладноломкости двойной цельнометаллической трубы с диаметром 12 метров или опоры, а также фактическому излому, разрушению и повреждению, вплоть до падения. Падение двойной цельнометаллической трубы с диаметром 12 метров или опоры приведет к крушению скоростного транспортного средства. Любая утечка или разгерметизация разряжения внутри этой трубы диаметром приведет к потере разряженного воздуха и аварии.
9. Существуют захлесты и пересечения пути в местах «Скоб-полуколец», например: на территории США и юга Канады. Трасса пути не едина, а разбита на трассу мира и Австралийское кольцо.
Существуют остановки-пробелы, например: трасса проходит от города Хошимин (Вьетнам) до города Бангкок (Таиланд) транзитно по территории Камбоджи, но не останавливается в Камбодже. Поэтому проблематично получить согласие короля Камбоджи на строительство этого пути, если Камбоджа лишена его использования.
10. Использование энергии от солнечных батарей ограничено только странами с тропическим климатом. Известно, что полноценно использовать энергию от солнечных батарей можно даже на Аляске https://translated.turbopages.org/proxy_u/en-ru.fe091528-61ea6dee-86bab5da-74722d776562/https/en.wikipedia.org/wiki/Solar_power_in_Alaska.
11. Скоростное транспортное средство с вагонами представлено подобно спутнику Земли. У спутника присутствует невесомость, которая при скорости 7,93 км/сек не препятствует ему лететь по орбите и быть в равновесии между силой притяжения Земли и радиусом полета над Землей. Спутник земли достигает скорости 7,93 км/сек на высоте более 100 км от поверхности земли, где давление атмосферы составляет 3,19*10-2 Па https://ru.wikipedia.org/wiki/%D0%A1%D1%82%D0%B0%D0%BD%D0%B4%D0%B0%D1%80%D1%82%D0%BD%D0%B0%D1%8F_%D0%B0%D1%82%D0%BC%D0%BE%D1%81%D1%84%D0%B5%D1%80%D0%B0. Подобное разряжение требуется внутри двойной цельнометаллической трубы. В данном случае магнитная подушка от применения суперпостоянных магнитов SmCo5 и суперэлектромагнитов, охлаждаемых жидким гелием, может выполнять функцию направляющего рельса, но сила тяжести не аннулируется. На разгон и торможение скоростного транспортного средства с вагонами потребуются большие затраты электроэнергии.
12. Себестоимость каждого транспортного средства будет не меньше себестоимости типового космического корабля, например: один миллиард $ США. Транспортное средство должно иметь конструктивную прочность присущую космическому кораблю, чтобы избежать аварии и гибели пассажиров.
13. Высок риск опасности для жизни пассажиров, если одновременно пропадут напряжение питающей сети трубчатого пути, например: на середине между остановками: горой Логан (Канада) и городом Ванкувер (Канада) 1486 километров, в туннеле гор Кордильер и произойдет разгерметизация салона транспортного средства, то быстро спасти пассажиров невозможно.
Известно также транспортное средство по патенту РФ №2548648, В61В 13/08, В61С 11/06, B60L 13/10, принятое за прототип и включающее несколько вагонов и выполненное с возможностью движения по рельсам, причем рельс установлен в воздухе, и крылья для приведения вагонов в подвешенное состояние, расположенные на обеих сторонах вагонов, пусковой двигатель, установленный в первом вагоне транспортного средства, для приведения в действие ведущих колес, основной электрический реактивный двигатель для ускорения транспортного средства при достижении им скорости 300 км/ч до скорости 500 км/ч или более с обеспечением подвешивания вагонов за счет подъемной силы крыльев, устройства автоматического управления подъемной силой крыльев и равновесием, и механизм для автоматического складывания и уборки крыльев. Колеса, ограничивающие подвески вагонов, расположены под обеими сторонам вагонов. Крыло снабжено вспомогательным реактивным двигателем для ускорения транспортного средства. В качестве устройств автоматического управления подъемной силой крыльев и равновесием использованы закрылки и элероны, установленные в крыльях с возможностью регулировки подъемной силы и равновесия. Механизм для автоматического складывания и уборки крыльев расположен на стыке между крылом и вагонами. Под рельсом выполнено пространство для установки сверхпроводящих силовых кабелей и оптоволоконных кабелей связи.
Однако транспортное средство представляет собой состав, поезд с вереницей вагонов (до 12), что повышает сопротивление воздуха при движении и ухудшает его взлетно-посадочные и полетные характеристики, ограничивая крейсерскую скорость полета до 500 км/час.
Снабжение всех 24-х крыльях механизмами складывания и уборки крыльев усложняет конструкцию, удорожая ее, и усложняя управление транспортным средством. Использование закрылков и элеронов в крыле повышает сопротивление воздуха на сверхзвуковой скорости.
Рычажные ограничители высоты подъема в полете транспортного средства, выполненные в виде колесных узлов, установленных снаружи (боковых сторон) балки рельса, закреплены по четыре узла на каждом вагоне. Максимальное число ограничителей составит 48. Эта конструкция имеет большое лобовое сопротивление воздуха, что ограничивает скорость движения, не выше 500 км/час.
Опора рельса имеет высоту более 10 метров над землей для создания транспортного клиренса. При этом балка рельса слишком массивная, для придания дополнительной прочности конструкции на высоте 10 метров. Все это усложняет и удорожает конструкцию. Кроме того, движение со сверхзвуковой скоростью на такой высоте снижает безопасность. Конструкция не обеспечивает возможность перемещения транспортного средства по стандартной наземной железнодорожной колее, что неудобно в эксплуатации, а также усложняет и удорожает конструкцию.
Используют два вида электрических двигателей: пусковой и вспомогательный реактивный. Основным недостатком пускового двигателя является порча рельса, выражающаяся в рывках приводного колеса о поверхность рельса при трогании с места. Из практики работы сервисных локомотивных депо известно, что рельс вследствие таких рывков становится волнообразным. Основным недостатком вспомогательного реактивного двигателя является громкий шум, необоснованный расход электроэнергии и турбулентность потока выходящего воздуха, поднимающего пыль в воздухе, вследствие завихрений, что ограничивает скорость движения. Кроме того, реактивные двигатели не способны создавать большое тяговое усилие.
Железнодорожные колесные пары выполнены жестко закрепленными, не убираемыми при полете транспортного средства, что создает дополнительное лобовое сопротивление, не позволяющее развить скорость более 500 км/час.
Для электроснабжения транспортного средства используют сверхпроводящие силовые кабели. Эксплуатация этих сверхпроводящих кабелей требует использование жидкого гелия и жидкого азота. Хранение жидкого гелия и жидкого азота разрешено только в сосудах Дьюара. Использование жидкого гелия и жидкого азота усложняет конструкцию прототипа и обязует надзорные органы бдительно контролировать работу скоростной линии, а в ряде случаев и может быть запрещена эксплуатация. Средняя цена жидкого гелия составляет от 5 до 10 $ /литр (долларов США за 1 литр). В большом Андронномколлайдере протяженностью 27 километров используется 1000000 (один миллион) литров жидкого гелия https://geliy24.ru/stati/primenenie-geliya-v-adrornnom-kollajdere. Например: на скоростном пути в 1000 километров может быть использовано 1000/27*1000000=37 037 037 литров жидкого гелия. Стоимость жидкого гелия составит 37 037 037*5=185 185 185 $ (долларов США).
Целью изобретения является устранение указанных выше недостатков. Технической задачей является повышение скорости движения транспортного средства до сверхзвуковой крейсерской скорости 1500 км/час, при экономии электроэнергии и упрощении конструкции.
Предлагаемая сухопутная неразрывная транспортно-энергетическая система содержит транспортное колесное средство с крыльями, приводимое в движение электродвигателями с возможностью передвижения по рельсам и воздуху, и включающее ограничители высоты подъема в полете, устройства для автоматического управления подъемной силой и равновесием в полете, расположенные на крыльях, узел соединения электродвигателей с транспортным средством.
В отличие от прототипа транспортное средство выполнено в виде планера в едином корпусе - фюзеляже, в котором расположены трубки Вентури; ограничители высоты подъема в полете выполнены в виде ограничительных роликов, а узел соединения электродвигателей с транспортным средством, расположен внутри фюзеляжа в сквозном продольном пазу, основная часть периметра которого образована активными элементами электродвигателей, включает строительную балку, внутри которой установлен проводник и щетки вращения, контактирующие с проводником, являющимся направляющей для качения ограничительных роликов; крылья выполнены с возможностью обеспечения эффекта экранопланирования; устройства для автоматического управления подъемной силой и равновесием в полете выполнены в виде элевонов и рулей направления; между элевонами по длине хорды крыла установлены вертикальные продольные аэродинамические перегородки; все электродвигатели выполнены линейными, узлы железнодорожных колес выполнены убираемыми, фюзеляж и крылья вверху имеют двойную обшивку со щелями в наружном слое для возможности отсасывания воздуха с их поверхности, при этом солнечные батареи являются автономным источником питания системы, энергия полученная от солнечных батарей, расходуется непосредственно в местах, где светит солнце, а также передается в места, где солнце уже село. Узлы железнодорожных колес выполнены с возможностью перемещения транспортного средства по стандартной наземной железнодорожной колее. Система снабжена солнечными батареями.
Выполнение транспортного средства в виде цельной конструкции планера в едином корпусе, упрощает конструкцию, снижает сопротивление воздуха и повышает его взлетно-посадочные и полетные характеристики, позволяя развить крейсерскую скорость полета до 1500 км/час.
Выполнение ограничителей высоты подъема в полете в виде ограничительных роликов, контактирующих с проводником, являющимся направляющей для качения этих роликов, упрощает эти узлы, повышая надежность, и снижает сопротивление воздуха при движении, находясь внутри фюзеляжа в отличие от прототипа. Это увеличивает скорость полета.
Выполнение крыльев с возможностью обеспечения эффекта экранопланирования, снабжение их рулями направления и элевонами, между которыми установлены вертикальные продольные аэродинамические перегородки, позволяет достичь сверхзвуковой скорости. Аэродинамические перегородки обеспечивают разделение каждым крылом воздуха (сверху и снизу) не менее чем на четыре параллельных, ламинаризированных потока (воздуха), что снижает турбулентность воздуха при сверхзвуковойскорости полета.
Использование линейных электродвигателей в качестве пусковых и основных обеспечивает бесшумную работу на больших скоростях, не создавая турбулентности потока, что увеличивает скорость полета, не приводя к порче рельсов в отличие от прототипа. Кроме того, эти электродвигатели не имеют ограничения по длине и количеству используемых тяговых плоскостей, тем самым они способны создавать большое тяговое усилие.
Выполнение железнодорожных колес складными (убираемыми) снижает лобовое сопротивление воздуха при движении, повышая скоростные характеристики.
Размещение узла соединения электродвигателей с транспортным средством внутри фюзеляжа также снижает сопротивление воздуха при движении, повышая скоростные характеристики и компактность конструкции, а использование в нем стандартных узлов и деталей (строительная балка - двутавр, проводник-швеллер, щетки вращения и другое) упрощают изготовление и снижают вес в отличие от прототипа.
Трубки Вентури создают разряжение воздуха, приводящее к отсасыванию пограничного слоя воздуха над крыльями и над обшивкой задней части фюзеляжа через щели в обшивке крыльев и фюзеляжа, что создает там ламинарный поток воздуха без завихрений, снижая многократно лобовое сопротивление воздуха при движении, увеличивая скорость полета.
По материалам документального фильма «Общие основы аэродинамики», снятого «Центрнаучфильмом» в 1969 году (https://www.youtube.com/watch?v=xHeUO54GNAM) исследовались трубки Вентури. Через подобные щели на опытном отсеке крыла, происходило отсасывание в полетных условиях пограничного слоя воздуха с помощью трубки Вентури. Полетные испытания показали, что, несмотря на неизбежные вибрации и атмосферную турбулентность пограничный слой воздуха был ламинарным на всем протяжении крыла, и лобовое сопротивление уменьшилось в 5-6 раз. В силу пропорциональности захвата сопутной струи воздуха в трубку Вентури пропорции проходящего потока воздуха над крыльями и над обшивкой задней части фюзеляжа на высоте около 10 км (в фильме) и высоте полета предлагаемого транспортного средства два метра одинаковы. То есть условия отсасывания пограничного слоя воздуха над крыльями и над обшивкой задней части фюзеляжа при полете на высоте два метра будут практически такими же, как и на высоте 10 км.
Небольшой размах крыльев в пропорции с длиной транспортного средства сокращает лобовое сопротивление. Фюзеляж вписан в центроплан оживательных крыльев, что создает одно общее сопротивление воздуха вместо двух. Вертикальные кили побочно выполняют функцию аэродинамических шайб и препятствуют смешиванию потоков воздуха под крылом и над ним. Аэродинамические перегородки разбивают поток воздуха над крылом и под ним на 4 ламинаризированных потока воздуха, попадающего только на свою секцию элевонов. Секции элевонов также разделены аэродинамическими перегородками, препятствующими смешиванию потоков воздуха в соседних секциях элевонов.
Выполнение узлов железнодорожных колес с возможностью обеспечения перемещения транспортного средства по стандартной наземной железнодорожной колее удобно в эксплуатации и не требует строительства специального железнодорожного пути. Это упрощает и удешевляет систему. Совместное использование пути для сверхзвуковых транспортных средств и для грузовых поездов, передвигающихся по рельсам со скоростью до 160 км/час, расширяет эксплуатационные возможности.
Энергия, полученная от солнечных батарей, расходуется непосредственно в местах, где светит солнце, а также передается в места, где солнце уже село, это снижает расход электроэнергии, получаемой с помощью электродвигателей.
Таким образом, форма и расположение деталей транспортного средства с использованием ламинаризированного потока воздуха над ним позволит разогнать транспортное средство до крейсерской скорости около 1500 км/час (1,2М) без потерь электроэнергии.
Кроме того, в предлагаемой системе транспортная линия пути является единой централизованной, что снимает преграды для взаимоотношений между странами.
В итоге, все признаки являются существенными и решают поставленную задачу.
Заявляемая система представлена на фигурах и таблицах.
Фиг. 1 Вид сверху, повернуто, без солнечных батарей, крыши и с арочнойфермой.
Фиг. 2 Вид справа, повернуто, с забором и с арочной фермой.
Фиг. 3 Вид спереди, повернуто.
Фиг. 4 Местный вид А на фиг.3, повернуто, увеличено.
Фиг. 5 Местный вид В, на фиг.3, повернуто, увеличено.
Фиг. 6 Местный вид С на фиг.5, увеличено.
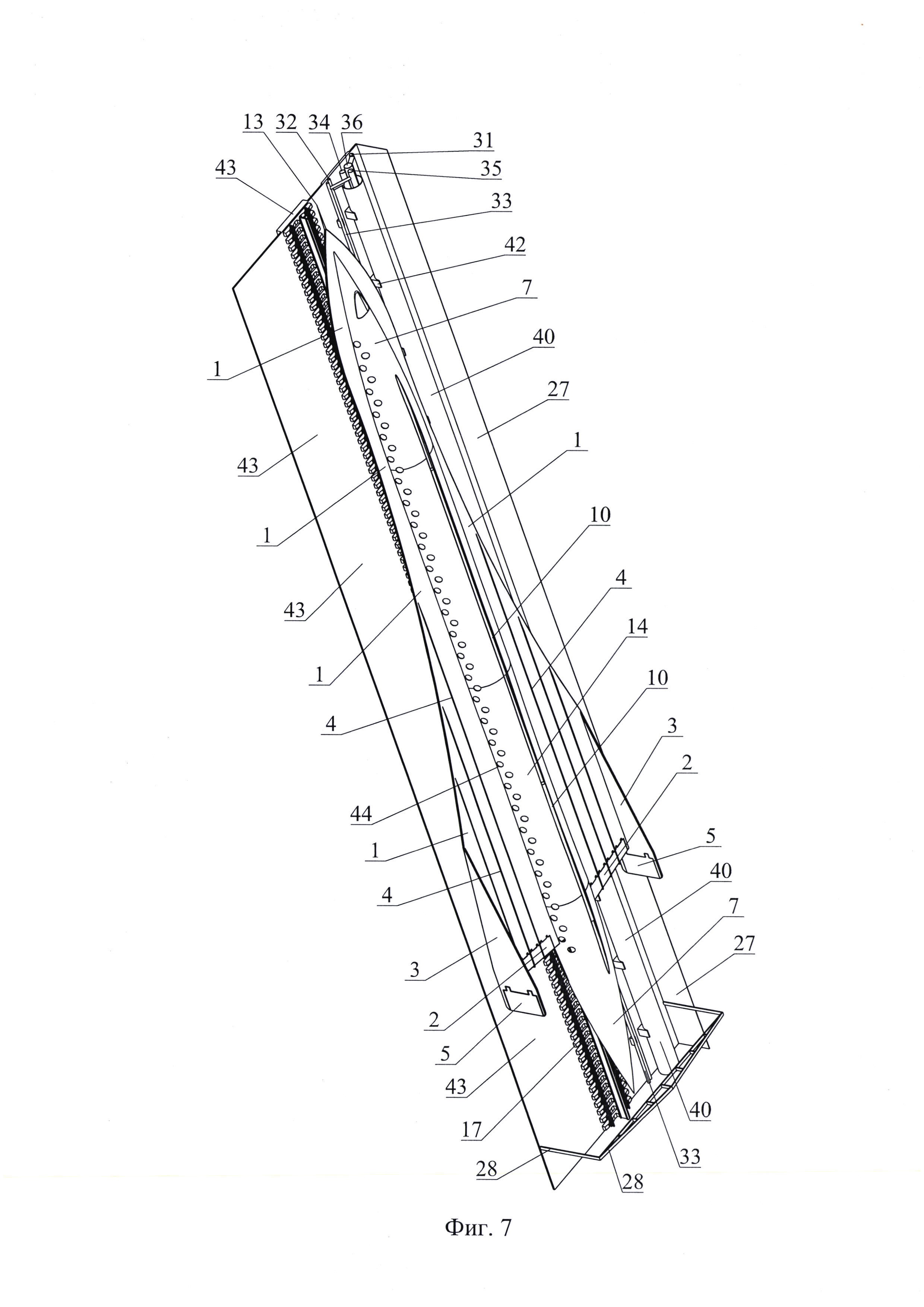
Фиг. 7 Вид в изометрии, повернуто с забором и с одной арочной фермой.
Фиг. 8 Полетная схема движения транспортного средства.
Фиг.9 Карта расположения транспортного пути в мире (сплошные линии) и соединительные линии передачи энергии постоянным током высокого напряжения HVDC (пунктирные линии).
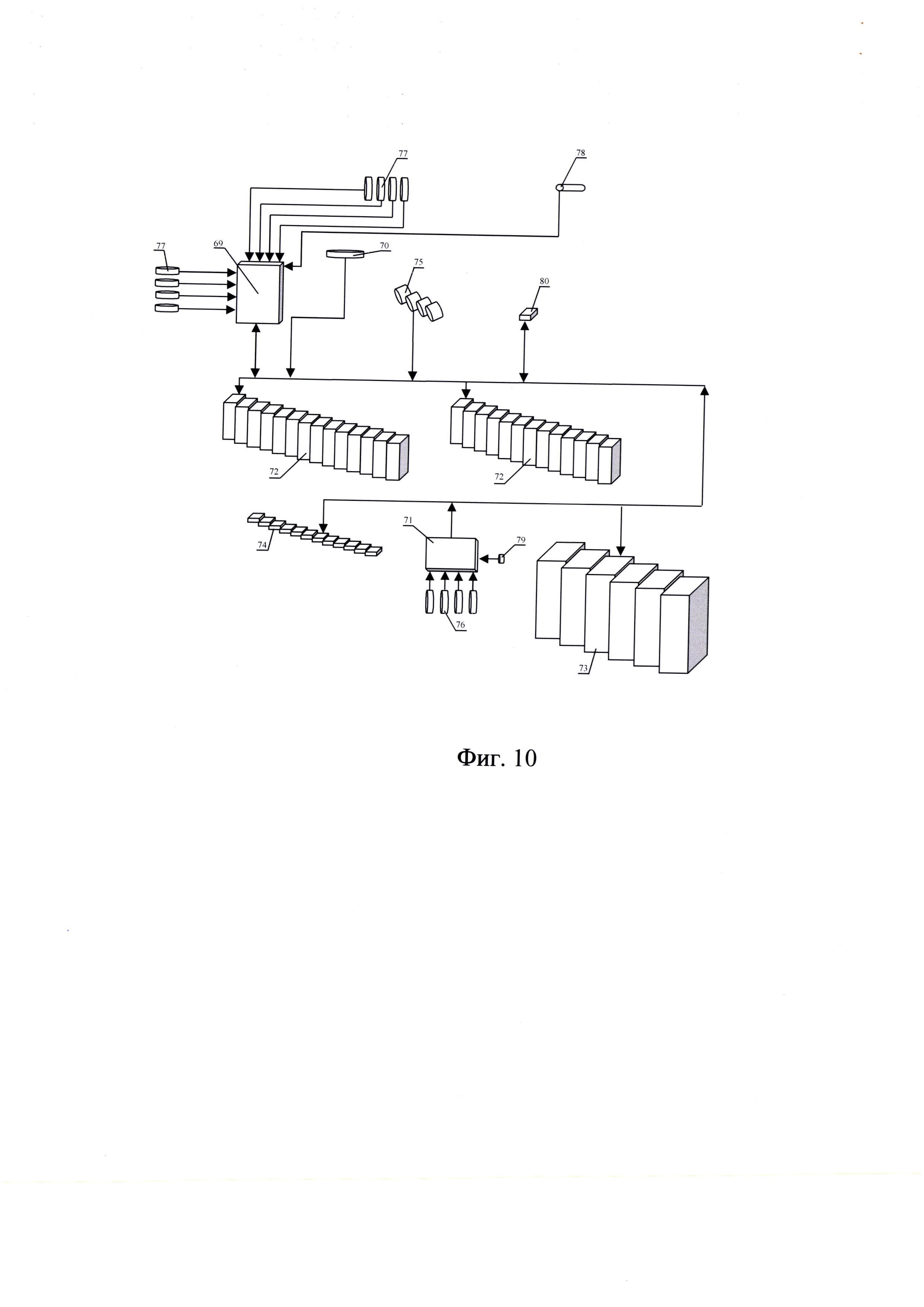
Фиг. 10 Аппаратная часть системы автоматического пилотирования транспортного средства.
Таб. 1 Таблица расстояний транспортного пути в мире, первый лист.
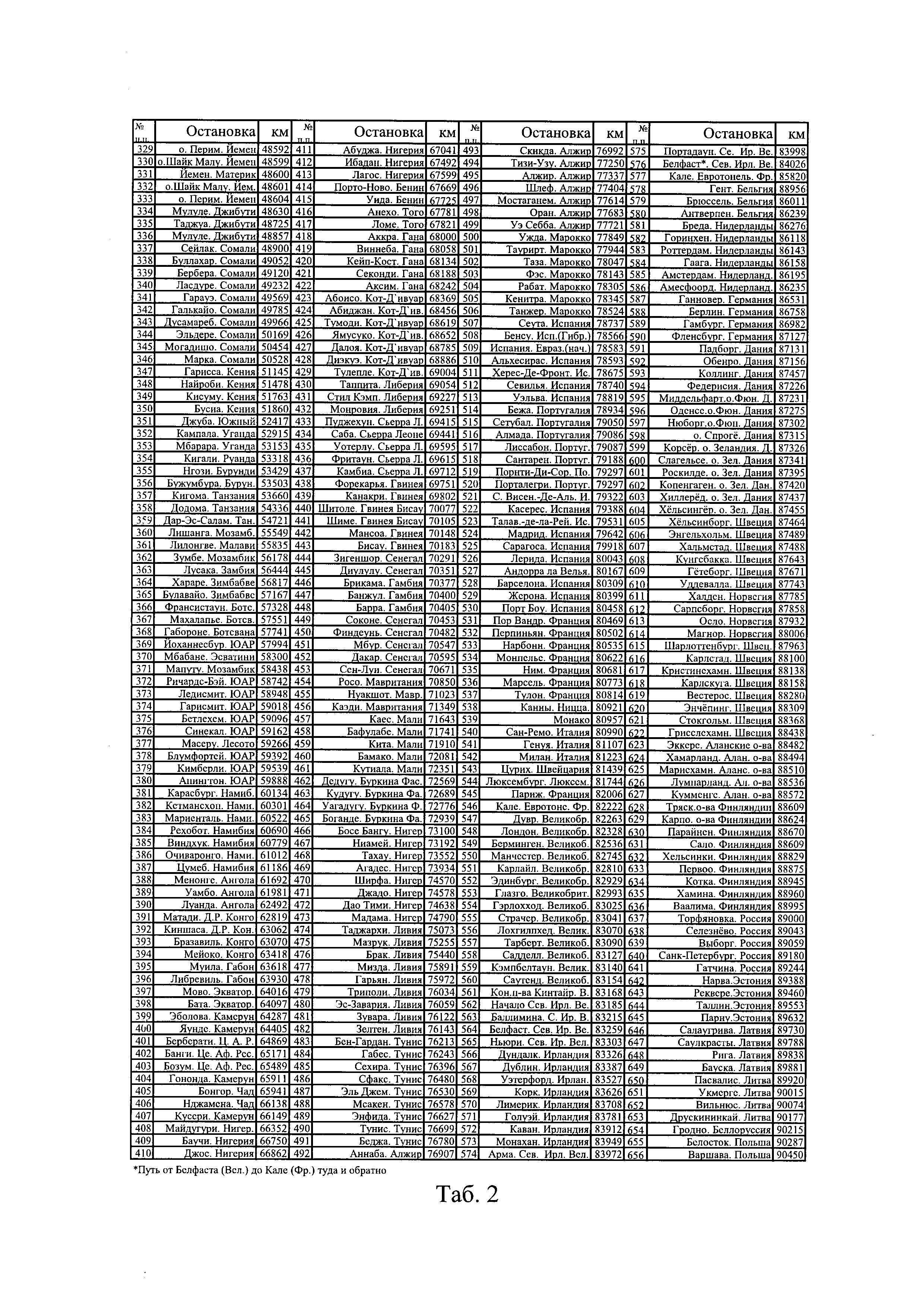
Таб. 2 Таблица расстояний транспортного пути в мире, продолжение, второй лист.
Таб. 3 Таблица расстояний транспортного пути в мире, продолжение, третий лист.
Таб. 4 Таблица расстояний транспортного пути в мире, продолжение, четвертый лист.
Сухопутная неразрывная транспортно-энергетическая система содержит электрическое, наземное, сверхзвуковое транспортное средство с использованием эффекта экранопланирования, внешне представляющее собой пассажирский самолет бесхвостку, среднеплан соживательными крыльями 1 (фиг.1,2,3,5,7). Крыло 1 переменной по размаху стреловидности (78° на 1/3 по размаху, на ширине 40% по размаху 89°, а на остальной части крыла 79°). Каждое крыло оснащено четырехсекционными элевонами 2 (фиг.1,7) (управляющими плоскостями, совмещающими функции рулей высоты для выполнения тангажа, элеронов для выполнения крена, и при взлете выполняют функцию закрылков), установленными шарнирно, размещенными по всему размаху крыла 1. На концах крыльев 1 имеются вертикальные (от 75° до 90° к горизонтальной плоскости) стабилизирующие поверхности - кили 3 (фиг.1,2,3,7). Между соседними элевонами 2 располагаются вертикальные (от 75° до 90° к горизонтальной плоскости) продольные, сверхтонкие аэродинамические перегородки 4 (фиг. 1,2,3,7), обеспечивающие разделение каждым крылом воздуха (сверху и снизу) не менее чем на 4 параллельных, ламинаризированных потока (воздуха). Крыло 1 набрано из сверхтонких, например: чечевичных профилей, переменной относительной толщиной от 1,5% у корня и 2,0% на конце. Управление транспортным средством осуществляется с помощью рулей направления 5 (фиг.2, 7), шарнирно установленных на килях 3 и элевонами 2. Силовые элементы транспортного средства и обшивка выполнены, например: из дюралюминия марки Д16АТ, армированного арматурой из бронзы марки БрНХК (с пружинными свойствами аналогичными бронзе марки БрБ2). Всем деталям при изготовлении придают пружинные свойства и необходимую жесткость с помощью нагрева, выдерживания при большой температуре и закалки. Силовые элементы левого и правого крыла 1 выполнены, например: единой конструкцией без разрывов. Силовые элементы конструкции крыльев 1 состоят из лонжеронов-шпангоутов (показаны только их центральные оси 6 на фиг.1,3), которые одновременно являются лонжеронами и побочно выполняют функцию нижних радиальных дуг шпангоутов - радиальных силовых элементов в фюзеляже 7 (фиг.1, 2, 3, 5, 7). Силовыми элементами конструкции крыльев 1 также являются: нервюры (не показаны), вертикальные кили 3, аэродинамические перегородки 4 и трубы уголкового профиля (не показаны) по периферии оживательного контура, для охлаждения передних кромок крыла 1 (далее уголковая труба). В передних, скошенных кромках: килей 3 установлены трубки, для охлаждения, по которым циркулирует жидкий хладагент, поступающий из уголковой трубы. Оси лонжеронов 6 располагаются поперечно продольной оси транспортного средства прямыми линиями, с равным шагом вдоль размаха крыла 1 (фиг.1, 2, 3, 5, 7). Каждая центральная ось лонжерона 6 проходит горизонтально прямо, через правое крыло 1 до фюзеляжа 7, (фиг.3). Прямая линия оси лонжерона, переходит в осевую, радиальную линию нижней дуги круга шпангоута 6 (фиг.3). Осевая линия дуги шпангоута 6 поворачивает по радиусу фюзеляжа 7 на угол около 20°. Осевая радиальная линия 6 правой нижней дуги круга (с углом около 20°) шпангоута в фюзеляже 7 ступенчато дважды переходит в центральную, осевую линию 6 (фиг.3) в поперечной балке. Центральная, осевая, горизонтальная, линия 6 в поперечной балке ступенчато дважды поднимается до левой, нижней дуги круга (с углом около 20°) шпангоута. Центральная ось из левой, нижней дуги круга шпангоута 6 радиально поворачивает на угол около 20° и доходит до лонжерона левого крыла 1 (фиг.3). Центральная ось левого лонжерона проходит через все левое крыло 1. Средняя радиальная часть каждого лонжерона, между левым и правым крылом 1 одновременно является неразрывной конструкцией радиальных (около 20°), нижних дуг каждого шпангоута. Радиальную, нижнюю правую и радиальную нижнюю левую дуги шпангоута соединяет двухступенчатая, поперечная балка с центральной осью 6 в составе фюзеляжа 7 (фиг.1,2,3,5,7). Лонжероны-шпангоуты закреплены в отверстия аэродинамических перегородок 4 (фиг.1,2,3,7), которые расположены параллельно продольной оси транспортного средства. К лонжеронам-шпангоутам закреплены нервюры (не показано), соединяющие два соседних лонжерона и соответственно расположенные продольно оси транспортного средства и поперечно лонжеронам. Нервюры имеют плоские, вертикальные грани на торцах для крепления их к внутренним стенкам лонжеронов. Сверху и снизу нервюры имеют своды большого радиуса, к которым закреплена обшивка транспортного средства. Нервюры по периметру вписаны с торцов в двутавровые балки соседних лонжеронов. За полками лонжеронов периметр нервюры вертикально переходит к нижнему и верхнему сводам большого радиуса крыла 1. Внутри нервюра облегчена по массе и имеет только необходимые ребра жесткости внутри своего периметра. Нервюры жестко закреплены к внутренним стенкам лонжеронов. Вертикальные кили 3 жестко закреплены к торцам лонжеронов-шпангоутов и к крайним нервюрам. Уголковая труба имеет две выступающие снизу и сверху грани начала формирования сверхтонкого чечевичного профиля крыла 1. С помощью этих граней уголковая труба жестко закреплена, например: болтовым соединением к концам лонжеронов и нервюр. Жидкий хладагент из уголковой трубы имеет возможность протекать последовательно прямоточно по передним, скошенным граням вертикальных килей 3. Остывание воды после нагрева производится в радиаторе, установленном внутри фюзеляжа 7. Вода насосом подается параллельно в два контура (не показаны) для левого и правого крыла. Верхние, радиальные дуги шпангоутов (силовые элементы в фюзеляже 7) с радиальными осями 8 жестко закреплены на середине диаметра лонжеронов-шпангоутов (осевые линии 6, фиг.3). Верхние радиальные дуги шпангоутов имеют подковообразный изгиб внутрь, в средней верхней части (радиальная ось 9, фиг.3) для огибания трубок Вентури 10 (фиг.1, 2,3,5,7). К двухступенчатым поперечным балкам, соединяющим радиальные, нижние правые и радиальные нижние левые дуги шпангоута (ось 6 на фиг.3), жестко закреплены неразрывные, радиально-прямоугольные конструкции (радиально-прямоугольная ось 11 на фиг.3) нижней машинной части шпангоутов. Каждая неразрывная радиально-прямоугольная конструкция состоит из малых внутренних дуг, охватывающих две продольные трубки Вентури, двух больших радиальных дуг, формирующих нижний свод машинного отделения транспортного средства, двух вертикальных балок и одной узкой горизонтальной балки посередине конструкции, охватывающих с зазором балку 12 (фиг.6). Силовые элементы (радиальные части шпангоутов) верхней пассажирской части фюзеляжа 7, нижней машинной части фюзеляжа 7 и три цилиндрических ряда внутренних продольных трубок Вентури 10 в поперечном сечении вписаны в один большой круг и составляют один фюзеляж 7. Перед фюзеляжем 7 расположена игла Маха 13 (шпиль на фиг.1,2,3,5,7) для отсоединения скачка уплотнения от носовой части фюзеляжа 7 и крыльев 1. Плавная талия 14 (фиг.1, 7) также способствует отсоединению скачков воздуха от фюзеляжа 7 на сверхзвуковой скорости. Силовые элементы крыльев 1 и фюзеляжа 7: лонжероны-шпангоуты, аэродинамические перегородки 4, нервюры, вертикальные кили 3, верхние, радиальные дуги шпангоутов, иглы Маха 13 образуют каркас из силовых элементов транспортного средства, фиг.1,2,5,7. На каркасе из силовых элементов, включая три внутренние, цилиндрические, пустотелые поверхности для размещения трубок Вентури 10, закреплена листовая обшивка, состоящая также как и силовые элементы, например: из листов дюралюминия марки Д16АТ, армированного сеткой из бронзы, марки БрНХК (с пружинными свойствами аналогичными бронзе марки БрБ2). Вверху крыльев 1, а также в задней части фюзеляжа 7 некоторые листы обшивки имеют двойную обшивку. В наружном слое обшивки есть щели (не показаны) через которые отсасывается часть пограничного слоя воздуха. Воздух, проходит через щели в двойной обшивке и попадает в прямоточные каналы, за счет разряжения воздуха, вызванного работой трубок Вентури 10. Прямоточные каналы для воздуха заходят тангенциально (по касательной) в трубки Вентури 10, для возможности отсасывания воздуха, зашедшего через щели в наружном слое обшивки. Трубки Вентури 10 организованы в три цилиндрических ряда, которые равноудалены друг от друга на угол 120 градусов, внутри большого круга фюзеляжа 7. Верхняя пассажирская часть фюзеляжа 7 и нижняя машинная часть фюзеляжа 7 в широком месте крыльев имеют плавную талию 14 (фиг.1,2,3,5,7), плавное небольшое сужение для снижения динамического сопротивления при прохождении сверхзвуковой скорости. Хорда крыльев 1 вблизи фюзеляжа, чуть короче длины всего транспортного средства для использования эффекта экранопланирования и увеличения аэродинамического качества. Края крыльев 1 вблизи килей 3 в продольном направлении имеют длинную хорду, также для использования эффекта экранопланирования и увеличения аэродинамического качества. В нижней машинной части фюзеляжа 7 установлены раздельные, облегченные, железнодорожные колеса 15 (фиг.5), каждое из которых своей осью закреплено в опорных подшипниках (не показаны). Обоймы этих опорных подшипников находятся в вертикальных рычагах-вилках (не показаны), подобных велосипедной вилке для крепления переднего колеса. Вертикальные рычаги-вилки имеют направляющие, для перемещения их по вертикали (не показаны) и пустотелую винтовую резьбу (имеют гайку). В пустотелую винтовую резьбу ввинчены винтовые валы мотор-редукторов (не показаны), которые жестко закреплены на подвижной в поперечном направлении горизонтальной площадке, врезанной в прямоугольное окно грани, сформированной двухступенчатыми поперечными балками лонжеронов-шпангоутов и крыльев 1. К этой площадке жестко закреплены направляющие вертикальных рычагов-вилок. Горизонтальная площадка имеет на своей поверхности жестко закрепленную вертикальную гайку, в которую вкручен вал мотор-редуктора с винтовой резьбой (не показан), для возможности изменения расположения горизонтальной площадки по ширине. Изменение ширины расположения горизонтальной площадки приводит к изменению ширины расположения вертикальных рычагов-вилок с направляющими и изменению ширины колеи железнодорожных колес 15, что необходимо для международного перемещения транспортного средства с адаптацией к колее страны приземления. Например, транспортное средство вылетит из России с шириной колеи 1520 мм, а приземлится во Франции с шириной колеи 1435 мм. Мотор-редукторы, ввинчивая свои винтовые валы, позволяют поднять вертикальные рычаги-вилки и поднять железнодорожные колеса 15 после взлета транспортного средства. Эти рычаги-вилки являются опорой для оси каждого железнодорожного колеса 15. Под катящейся поверхностью железнодорожных колес 15 находятся железнодорожные рельсы 16 (фиг.5), например: стандартного типа Р65. Железнодорожные рельсы 16 жестко закреплены своими основаниями к шпалам 17 (фиг.5), например: железобетонным со стальными анкерными креплениями 18 (фиг.5). Ширина железнодорожной колеи, например: стандартная 1520 мм. В середине железобетонной шпалы 17 находится вертикальный столб 19 (фиг.6). Вверху вертикальных столбов 19 находятся горизонтальные площадки, в которых жестко закреплены стальные анкерные крепления 20 (фиг.6), в которых жестко закреплена балка 12. На внутреннюю стенку балки 12, жестко закреплены с двух сторон и диэлектрически изолированы вторичные элементы 21 (фиг.6) электродвигателей, например: асинхронных. Элементы 21 представляют собой вертикальные листы алюминия диэлектрически изолированные и жестко закрепленные с двух сторон к внутренней стенке балки 12, и образуют короткозамкнутую обмотку роторов электродвигателей. Внутри балки 12 к нижним стенкам верхней полки, жестко закреплены и изолированы от нее горячекатаные швеллеры 22 (фиг.6), например: профиль 5У, сталь атмосферостойкая марки 10ХСНД. Внутренняя поверхность швеллера 22 покрыта медью толщиной 2 мм, например: по известной технологии омеднения стали. Сверху балки 12 через диэлектрическую прокладку жестко закреплен вторичный элемент 23 (фиг.6), в поперечном сечении представляющий собой равнобедренный треугольник, с углами наклона верхних граней к горизонту менее 3°, изготовленный из алюминия. Вторичный элемент 23 побочно является горизонтальной треугольной крышей для предотвращения попадания атмосферных осадков на балку 12, вторичные элементы 21 и швеллеры 22 (фиг.6). На расстоянии, например: 30 мм слева и справа от вторичных элементов 21 располагаются, боковые индукторы 24 (фиг.6) тяговых электродвигателей. Над вторичным элементом 23, например: на высоте 30 мм горизонтально располагаются верхние индукторы 24 тягового электродвигателя. Боковые индукторы 24 жестко закреплены к вертикальным балкам неразрывной радиально-прямоугольной конструкция фюзеляжа 7 (фиг.1, 2, 3). Верхние индукторы 24 установлены на восьми горизонтальных площадках восьми вертикально-подвижных оснований (не показаны). Каждое вертикально-подвижное основание имеет горизонтальную площадку. В вертикально-подвижных основаниях имеются вертикальные, ответные, пустотелые, винтовые резьбы (гайки), в которые вкручены винтовые валы, мотор-редукторов (не показаны). Регулирование высотой подъема вертикально-подвижных оснований приводит к регулируемому уровню подъема высоты верхних индукторов 24 над вторичным элементом 23 во всех ситуациях работы транспортного средства (взлете, посадке, равномерном полете на фиг.8). На четырех вертикально-подвижных основаниях шарнирно закреплены приводные щетки вращения 25 (фиг.6). Биметаллические (снаружи медь внутри сталь) волоски каждой щетки вращения 25 запрессованы в вал из кадмиевой бронзы, который запрессован в обоймы двух шариковых подшипников. Между подшипниками находятся биметаллические волоски щеток вращения 25. Каждый вал имеет два торца. Торцы валов с одной стороны закреплены муфтами к выходным валам мотор-редукторов. Всего для вращения четырех радиальных щеток вращения 25 используется четыре мотор-редуктора. Корпуса этих четырех мотор-редукторов (не показаны) жестко закреплены к четырем из восьми горизонтальным площадкам вертикально-подвижных оснований (описанным выше). Торцы валов с другой стороны отполированы и контактируют с вспомогательными медно-графитовыми щетками (не показаны). Вспомогательные щетки обеспечивают электропитание всего транспортного средства. Радиальные щетки 25 всегда поднимаются или опускаются совместно с верхними индукторами 24. В любой точке полета (фиг.8) щетки 25 скользят биметаллическими, токосъемными волосками по внутренним граням проводников (швеллеров) 22. Щетки 25 вращаются попутного с полетом транспортного средства со скоростью, пропорциональной скорости его полета. Покрытые медью внутри швеллеры 22 являются проводниками для щеток 25 и одновременно являются направляющими рельсами для качения шестнадцати верхних, ограничительных роликов 26 (фиг.6) при взлете, посадке и выравнивании транспортного средства. Верхние ролики 26 своими осями с натягом установлены в обоймы шариковых подшипников, которые жестко закреплены в посадочные места в нижней машинной части фюзеляжа 7 (фиг.1, 2, 3, 5, 7). Верхние ролики 26 (фиг.6) побочно, выполняют функцию, роликов для аварийной посадки, связанной с поломкой выдвижения железнодорожных колес 15 при посадке транспортного средства. Верхние ролики 26 имеют возможность при снижении высоты катиться по нижней внутренней грани балки 12, что спасает транспортное средство от кружения. Кроме вертикальных роликов 26 в транспортном средстве с двух сторон установлены горизонтальные ограничительные ролики (не показаны), которые установлены на уровне середины высоты боковых индукторов 24. Горизонтальные ограничительные ролики не позволяют индукторам 24 касаться вторичных элементов 21 и в случае приближения имеют возможность поступательно катиться по поверхности вторичных элементов 21 (фиг.6). Для снижения уровня шума от полета транспортного средства и влияния бокового ветра на пути движения с боков установлен забор 27 (фиг.1,2,3,7) из листовой атмосферостойкой стали марки 10ХСНД с толщиной 1 мм немного выше крыльев 1 и закреплен к вертикальным столбам арочных ферм 28. Вверху двух наклонных граней ферм 28 (фиг.1,2,3,7) закреплена крыша 29 (фиг.3), из листовой атмосферостойкой стали марки 10ХСНД с толщиной 1 мм, которая закрывает весь путь движения транспортного средства от атмосферных осадков, порывов ветра и является конструктивным основанием для размещения и закрепления солнечных батарей 30 (фиг.2,3), например: монокристаллических INE-MONO-8MA, мощностью 430-450 Вт.Для продольного закрепления между арочными фермами 28 забора 27 и крыши 29 используют продольные металлоконструкции (не показаны). Солнечные батареи 30 являются автономным источником питания системы. Напряжение, которое выдает одна солнечная батарея без нагрузки 48,8 В. Напряжение, которое выдает одна солнечная батарея под нагрузкой 40,3 В. Габариты одной солнечной батареи 2108*1048*35 мм. Вес солнечной батареи 24,5 кг. Солнечные батареи 30 способны вырабатывать электроэнергию, только в светлое время суток. Дистанция безопасного последовательного движения между транспортными средствами составляет 100 километров. Взлетный вес транспортного средства, например: до 100 тонн. Уклон рельсов 16 стандартный, для участков с электровозной тягой для российских железных дорог 15%, что соответствует 8,5 градусам. Максимальное усилие тяги https://len-stal.ru/poleznaya-informatsiya/articles/657/, которое с запасом, должны обеспечивать боковые и верхний тяговые индукторы 24 составит: Р=W*sinα+μ*W*cosα=100000*0,147809+0,01*100000*0,989=14781+989=15770 кгс, где Р - тяговое усилие транспортного средства, кгс; W- масса транспортного средства, кг; μ - коэффициент трения железнодорожных колес 15 по рельсам 16; a - угол уклона рельсов 16, в градусах. Пропорционально расчету линейных асинхронных электродвигателей https://elar.urfu.ru/bitstream/10995/19689/1/urfu1083s.pdf получим тяговое усилие в 154651 Н (15770 кгс) и усилие левитации 223237 Н (22764 кгс), при полной потребляемой мощности S=P+jQ=2390+1521=3911 кВА, где Р -активная затраченная мощность боковых и верхних тяговых индукторов 24, кВт; jQ - реактивная затраченная мощность боковых и верхних тяговых индукторов 24, кВАр (киловольт*ампер реактивных). Для электропитания одного транспортного средства на 100 км пути необходимо постоянное напряжение от 2800 вольт до 4000 вольт. Для питания удобно использовать напряжение (разность потенциалов), формируемое 70 последовательно подключенными солнечными батареями INE-MONO-8MA. Напряжение питания транспортного средства составит: U=70*48,8=3416 вольт. Максимальная сила тока, питающего транспортное средство, составит: I=S/U=3911000/3416=1145 ампер, где S-потребляемая мощность транспортного средства, ВА(вольт-ампер). В силу того, что энергия, расходуемая одним транспортным средством на 100 километрах пути, составляет 1,44% от общей вырабатываемой энергии от солнечных батарей, то можно использовать оставшуюся энергию 98,56%, для передачи по стандарту VHDC (DIN EN 60633-2016 Terminology for high-voltage direct current (HVDC) transmission (IEC 60633:1998 + A1:2009 + A2:2015). Передача энергии постоянным током высокого напряжения в страны, где уже село солнце необходима для работы транспортно-энергетической системы ночью, а также для коммерческого использования электроэнергии, поступающей со стандартом HVDC из стран, где светит солнце.
Солнечные батареи разделены на две группы и последовательно-параллельно подключены. Сначала разберем последовательное подключение солнечных батарей. Минусы питания: первой солнечной батареи первой группы и первой солнечной батареи второй группы являются общими минусами питания для первой и второй группы солнечных батарей. Общий минус питания подключен к общей минусовой высоковольтной питающей фазе 31 (фиг.4). Плюсы питания первых солнечных батарей первой и второй группы подключен к минусам вторых солнечных батарей первой и второй группы. Плюсы питания вторых солнечных батарей подключены к минусам третьих солнечных батарей первой и второй группы и так далее. Напряжение питания без нагрузки, между общими минусами и плюсами первых солнечных батарей первой и второй группы составит: 48,8*1=48,8 В. Напряжение питания без нагрузки, между общими минусами и плюсами вторых солнечных батарей первой и второй группы составит 48,8*2=97,6 В. Напряжение питания без нагрузки между общими минусами и плюсами третьих солнечных батарей первой и второй группы составит: 48,8*3=146,4 В. Напряжение питания без нагрузки между общим минусом и плюсом последней 2464-ой солнечной батареи первой группы составит: 48,8*2464=120243 вольта. Плюс питания последней 2464 солнечной батареи первой группы подключен к плюсовому швеллеру 22 (фиг.6) и к первой высоковольтной питающей фазе 32 (фиг.4). Напряжение питания без нагрузки между общим минусом и плюсом последней 2394-ой солнечной батареи второй группы составит: 48,8*2394=116827 вольт. Плюс питания последней 2394 солнечной батареи второй группы подключен к минусовому швеллеру 22 и ко второй высоковольтной питающей фазе 33 (фиг.4). Напряжение первой группы солнечных батарей будет превышать напряжение второй группы солнечных батарей на разность потенциалов равную AU=U1-U2=120243-116827=3416 вольт, где U1 и U2- соответственно напряжение, вырабатываемое первой и второй группами солнечных батарей, вольт. Имеем две линии передачи энергии постоянным током высокого напряжения (VHDC) с объединенным минусом. Непосредственно транспортное средство будет запитано от разности потенциалов между плюсами первой и второй групп солнечных батарей. Описанные выше условия, когда напряжение питания первой группы солнечных батарей равно 120243 вольта, а напряжение питания второй группы солнечных батарей равно 116827 вольт соответствуют условиям запитывания солнечных батарей 30, расположенных на крыше 29. Технически возможно подключение напряжения питания для первой группы солнечных батарей около 1203400 вольт, а напряжение питания второй группы солнечных батарей около 1200000 вольт. Это 10 кратное увеличение напряжения для условий выполнения услуг по транспортировке энергии на дальние расстояния. Загрузка энергией от собственных солнечных батарей составляет 10% от номинально возможной, а остальные 90% можно передавать на дальние расстояния по другим коммерческим проектам, что позволит быстро окупить вложенные средства.
При ширине крыши 29 равной около 14 метров водном ряду возможно размещение 14 солнечных батарей (7 слева и 7 справа). Первая группа солнечных батарей займет длину: 2464/14=176 рядов. Вторая группа солнечных батарей займет длину 2394/14=171 ряд. Суммарная длина первой и второй группы солнечных батарей составит: 176+171=347 рядов или 2,108*347=731,476 метр. Теперь разберем параллельное подключение солнечных батарей. На 100 километрах пути последовательно с чередованием разместим: 100000/731,476=136,7 первых и вторых групп солнечных батарей, подключенных параллельно, для увеличения силы тока и мощности потребляемой транспортным средством и передаваемой энергии на дальние расстояния. Первая и вторая группы солнечных батарей вырабатывают ток 10,5 ампер. Рассчитаем ток, поступающий от 136,7 первых и вторых групп солнечных батарей на 100 километрах пути: 10,5*136,7=1435 ампер. По закону Ома ток, текущий по первой группе солнечных батарей будет утекать во вторую группу солнечных батарей с разностью потенциалов 3416 вольт. Так как максимальный ток потребления транспортным средством составил: 1145 ампер, то поступающий ток 1435 ампер с запасом обеспечит тягу одиночного транспортного средства на 100 километрах пути. Первую и вторую высоковольтные плюсовые питающие фазы изготавливают с учетом большой пропускной способности, например: снаружи из атмосферостойкой стальной трубы марки 10ХСНД. Наружный диаметр трубы, например: 159 мм, с толщиной стенки 4,5 мм. Внутренняя поверхность трубы, обезжирена и покрыта медью толщиной 2 мм, по известной технологии омеднения стали. При монтаже питающей фазы залитые алюминием трубы медным винтом вкручивают в медную гайку уже смонтированной трубы. Торцевые стыки стальных труб соединены электросваркой. Так формируют неразрывные электропроводящие плюсовые фазы 32 и 33 (фиг.4). Подобно изготавливают и монтируют общую минусовую высоковольтную питающую фазу 31, но с разницей в том, что используют стальную трубу с наружным диаметром 245 мм и толщиной стенки 6,5 мм. Стальная труба общей минусовой высоковольтной питающей фазы также, покрывается медью внутри на 2 мм, а в нее устанавливают на медных распорках медную гайку и медный винт. Затем общая минусовая высоковольтная питающая фаза заливается расплавленным алюминием.
Путь сухопутной неразрывной транспортно-энергетической системы в мире закольцован и нигде не пересекается и составляет 157926 километров (сплошные линии пути со стрелками направления движения на фиг.9. Движение происходит по направлению против часовой стрелки. Остановки пути в мире написаны в таблицах 1-4. Монтаж первой, второй высоковольтных плюсовых питающих фаз 32 и 33 и общей минусовой высоковольтной питающей фазы 31 производят на всех 157926 километрах пути в мире. В силу того, что в темное время суток будут недопустимо большие потери электроэнергии на всем пути в мире, то можно снизить сопротивление первой, второй плюсовых питающих фаз 32, 33 и общей минусовой питающей фазы 31 (фиг.4), подключением коротких, производительных, соединительных линий (пунктирные). Соединительные линии для плюсовых питающих фаз 34 (фиг.4), 35 (фиг.4) и соединительная общая минусовая питающая фаза 36 (фиг.4) выполнены из двух стальных труб, с внешними диаметрами 325 мм (толщина стенки 7,5 мм) и 480 мм (толщина стенки 9 мм) соответственно. Стальные трубы для соединительных линий покрыты внутри медью на 2 мм, внутри их на медных распорках установлены медные гайки (не показано) с одной стороны и ответные медные винты (не показано) на медных распорках, с другой стороны. Вышеописанные медные стальные трубы залиты расплавленным алюминием и смонтированы подобно монтажу питающих фаз 32 и 33, 31. Фаза 34 подключена к первой фазе 32 с помощью перемычки 37 (фиг.4). Фаза 35 подключена к фазе 33 с помощью перемычки 38 (фиг.4). Фаза 36 подключена к фазе 31 с помощью перемычки 39 (фиг.4).
Получим две линии передачи энергии постоянным током высокого напряжения (VHDC) с объединенным минусом для экономии, расширения области применения и улучшения качества. Непосредственно транспортное
средство будет запитано от разности потенциалов между плюсовыми фазами: 32 - 33 и 34 - 35.
Две соединительные плюсовые высоковольтные питающие фазы 34, 35 и соединительная общая минусовая высоковольтная питающая фаза 36 на полимерных распорках размещены во внешней защитной трубе 40 (фиг.4), залитой полиамидом 41 (фиг.4) с наружным диаметром 1219 мм и толщиной стенки 27 мм, марки: SAWL 450 IFD, предназначенной для прокладки газопроводов в морских глубинах.
Соединительные линии, которые идут по морю, снабжают защитной трубой 40 (фиг.4) с внешним диаметром 1219 мм и толщиной стенки 27 мм, но когда соединительные линии устанавливают на суше, то толщина стенки 15 мм. Высоковольтные плюсовые питающие фазы 32 и 33 и общая минусовая высоковольтная питающая фаза 31 при прохождении пути туда и обратно, например: от города форт Сент-Джон Канада до города Чумикан Россия объединены, для сокращения электрического сопротивления. Объединена каждая плюсовая питающая фаза 32 туда с фазой 32 обратно, подобно объединена фаза 33 и подобно объединена общая минусовая высоковольтная питающая фаза 31 (фиг.4). Пути туда и обратно от Таиланда до Австралии и от Франции до Ирландии имеют подобное объединение фаз.
Подключение электропроводов солнечных батарей к швеллерам 22, фазам 32, 33 и к общей минусовой высоковольтной питающей фазе 31 производят в электрощитах-стойках 42 (фиг.2,4). Железобетонные шпалы 17 закреплены на армированном железобетонном монолите марки В 7,5, который является полом 43 (фиг.1,2,3,4,5,7). Иллюминаторы 44 (фиг.1,2,3,7) на транспортном средстве установлены по высоте в шахматном порядке между четными и нечетными рядами для увеличения расстояния между пассажирами с целью снижения риска заражения вирусными инфекциями.
Соединительная линия 45 передачи энергии постоянным током высокого напряжения HVDC на фиг.9 проходит от города Сакраменто (США) транзитно через город Лос-Анжелес (США), вдоль севера Мексики до города Атланта (США). Соединительная линия 46 на фиг.9 проходит от столицы Перу Лимы до юга Перу, транзитно через столицу Боливии Ла Паз, город Тринидад (Боливия), город Манаус (Бразилия) до города Макапа (Бразилия). Соединительная линия 47 на фиг.9 проходит от столицы Чили города Сантьяго транзитно через города: Темуко (Чили), Неукен (Аргентина), Буэнос Айрес (Аргентина), Асунсьон (Парагвай), до города Тринидад (Боливия). Соединительная линия 48 на фиг.9 проходит от столицы Канады Оттавы транзитно через реку Святого Лаврентия (Канада), северо-восток Канады и запад Ирландии в Атлантическом океане (около 3100 километров). От города Голуэй (Ирландия) проходит транзитно через город Корк (Ирландия) далее морем до Великобритании транзитно через город Плимут, далее через пролив Ла Манш до столицы Франции Парижа затем до столицы Испании Мадрида. Соединительная линия 49 на фиг.9 проходит от города Макапа (Бразилия) до столицы Гвинеи Конакри, транзитно через острова Сан-Паулу в Атлантическом океане протяженностью около 4500 километров. Далее проходит транзитно через Мали и Алжир до северо-запада Ливии,от северо-запада Ливии идет транзитно через: Тунис, северо-восток Алжира, средиземное море до столицы Испании Мадрида. Соединительная линия 50 на фиг.9 проходит от города Макапа (Бразилия) до столицы Канады Оттавы, транзитно через Французскую Гвиану, Суринам, Гайану, Венесуэлу, группу островов в Карибском море: Гренаду, Доминику, Пуэрто, Гаити, Кубу, город Майами (США), город Атланта (США), город Вашингтон (США), город Нью-Йорк (США). Соединительная линия 51 на фиг.9 проходит от города Сьюдад- Гуаяна (Венесуэла) до города Блуфилдс (Никарагуа), транзитно через Венесуэлу, Колумбию, Панаму, Коста-Рику. Соединительная линия 52 на фиг.9 проходит от столицы Франции Парижа до столицы Польши Варшавы. Соединительная линия 53 на фиг.9 проходит от столицы Германии Берлина до столицы Чехии Праги. Соединительная линия 54 на фиг.9 проходит от столицы Финляндии Хельсинки до северо-запада Ливии, транзитно через: Финский залив, Эстонию, Латвию, Литву, Польшу, Сербию, Боснию и Герцеговину, Хорватию, Средиземное море, Италию, остров Сицилию. Соединительная линия 55 на фиг.9 проходит от столицы южного Судана Джубы до города Кимберли (ЮАР), транзитно через Демократическую республику Конго, Замбию, Зимбабве, Ботсвану. Соединительная линия 56 (штриховая на фиг.9) проходит от столицы Южного Судана Джубы до столицы Центральноафриканской республики Банги. Соединительная линия 57 (штриховая линия на фиг.9) проходит от столицы Демократической республики Конго Киншаса до столицы Руанды Кигали. Соединительная линия 58 на фиг.9 проходит от города Менонге (Ангола) до города Ндола (Замбия). Соединительная линия 59 на фиг.9 проходит от города Цумеб (Намибия) до Франсистаун (Ботсвана). Соединительная линия 60 на фиг.9 проходит от столицы Финляндии Хельсинки до столицы Канады Оттавы, транзитно через города Санкт-Петербург, Москву, Новосибирск, Кемерово, Красноярск, Тайшет, Якутск, Охотск, транзитно проходит через Чукотский полуостров, Берингов пролив, остров Ротманова (Россия), остров Маленький Диомед (США) и города:Уэлс (Аляска. США), Фэирбанкс (Аляска. США), Танакрос (Аляска. США), Уайтхорс (Канада), Форт Нельсон (Канада), Эдмонтон (Канада), Виннипег (Канада). Соединительная линия 61 на фиг.9 проходит от северо-запада Ливии до Гонконга, транзитно через: Египет, Суэцкий канал, Израиль, Иорданию, Саудовскую Аравию, Кувейт, Иран, Пакистан, Индию, Бангладеш, Мьянму, Лаос, Вьетнам, Китай. Соединительная линия 62 на фиг.9 проходит от юга Алжира до соединительной линии 60 (около города Нижний Новгород), транзитно через столицу Чад Нджамену, Центральноафриканскую республику, столицу Южного Судана Джубу, Эфиопию, Джибути, Йемен, саудовскую Аравию, Ирак, Иран, Азербайджан, город Волгоград (Россия). Соединительная линия 63 на фиг.9 проходит от города Суккур (Пакистан) до города Омск (Россия), транзитно через Пакистан, Афганистан, Таджикистан, Узбекистан, Казахстан. Соединительная линия 64 на фиг.9 проходит от Гонконга до Охотска (Россия), транзитно через восток Китая, Желтое море, восток России. Соединительная линия 65 на фиг.9 проходит от города Мынле (Китай) до города Мельбурн (Австралия), транзитно через Лаос, Таиланд, Малайзию, острова Индонезии, Тиморское море, Австралию. Соединительная линия 66 на фиг.9 проходит от города Чита (Россия) до пересечения реки Лена с 60 параллелью. Соединительная линия 67 на фиг.9 проходит от города Харбин (Китай) до острова Хоккайдо (Япония), транзитно через дальний восток России. Соединительная линия 68 на фиг.9 проходит от города Брисбен (Австралия) до города Бэрдсвилл (Австралия). Туннели, соединяющие материки, острова, полуострова, берега рек строить по известной технологии, подобной строительству погружного туннеля Детройт-Виндзор (США-Канада) с использованием двойной стальной оболочки.
С целью автоматизации полета используют систему автоматического пилотирования, аппаратная часть которого на фиг.10: один программируемый логический контроллер 69, далее (ПЛК) PLC, например: MDS CPU 1100 и устройства для управления полетом. Для управления полетом используются устройства: двухосевой гироскоп 70 с конвертером (не показан), модуль аналогового ввода 71, двадцать семь преобразователей частоты 72, восемь двойных реверсивных контакторов (не показано), шесть управляемых тяговых инверторов 73, двенадцать оптических дальномеров 74 с конвертерами (не показаны), четыре абсолютных энкодера (датчика углового перемещения) 75 с конвертерами (не показаны), четыре индуктивных датчика положения с аналоговыми выходами 76, восемь аналоговых тензометрических датчиков силы 77 с усилителями (не показаны), датчик скорости 78, датчик температуры 79 и радиоприемное устройство 80. В центре транспортного средства установлен двухосевой гироскоп 70, например: ADIS16135, который контролирует положение транспортного средства в горизонтальной плоскости. Двадцать семь преобразователей частоты, например: MCIG15/P18.5-4BF Instart, приводят во вращение двадцать семь электродвигателей мотор-редукторов: двух в левом и в правом крыле два четырех секционных элевона 2, двух рулей направления 5, восемь для подъема или спуска восьми вертикальных рычагов-вилок с опорными подшипниками для удержания осей железнодорожных колес 15 и при переключении восьми реверсивных контакторов (не показаны) приводят во вращение восемь других мотор-редукторов (не показаны) для изменения расположения восьми подвижных горизонтальных площадок по ширине окон, в которые они врезаны (при перестройке ширины колеи для другой страны), насоса системы охлаждения (не показан), вентилятора системы охлаждения (не показан), компрессора (не показан), восьми для подъема и спуска верхних тяговых индуктора 24 на восьми площадках вертикально-подвижных оснований, четыре для вращения приводных щеток вращения 25. Осуществляется автоматическое регулирование подъемом и спуском щеток вращения 25 к внутренним, желобам швеллеров 22. Боковые и верхние индукторы 24 управляются от шести управляемых тяговых инверторов 73, которые получают электропитание от вспомогательных щеток (не показаны), прижатых к торцам валов щеток вращения 25. Всем оборудованием в транспортном средстве управляет ПЛК. В восьми вертикально-подвижных основаниях закреплены оптические дальномеры, например: VL53L0X, которые измеряют расстояние от вертикально подвижного основания до поверхностей желобов швеллера 22. Оптические дальномеры передают измеренное расстояние в ПЛК, которое подает команду в частотные преобразователи (фиг.10) для регулирования спуска или подъема высоты: вертикально-подвижного основания. Соответственно произойдет подъем или спуск щеток 25 в разных ситуациях работы транспортного средства. Еще четыре оптических дальномера, например: VL53L0X жестко закреплены в нижней машинной части фюзеляжа 7 на 20 мм выше нижней грани тяговых индукторов 24 и направлены вниз на внутреннюю грань нижней полки балки 12. Два оптических дальномера жестко закреплены в передней части транспортного средства слева и справа, а два других оптических дальномера жестко закреплены в задней его части слева и справа. Вышеописанные четыре оптических дальномера измеряют высоту транспортного средства от 20 мм выше нижней грани тяговых индукторов 24 до нижней грани полки балки 12 и передают данные о высоте транспортного средства в ПЛК. ПЛК обрабатывает полученные данные о высоте полета и при необходимости корректирует ее, например управлением скоростью или изменением угла элевонов 2. Модуль аналогового ввода, например: MDS AI-8TC/I подключен к ПЛК по стандарту связи RS-485. К модулю аналогового ввода подключены четыре аналоговых индуктивных датчиков положения с аналоговыми выходами (фиг.10), например: ДПА-Ф60-40У-2110-Н, для измерения зазора между тяговыми индукторами 24 (фиг.6) и вторичными элементами 21 (фиг.6) слева и справа, в начале и в конце тяговых индукторов 24. К модулю аналогового ввода подключен датчик температуры охлаждающей жидкости, например: pt-100. Восемь аналоговых тензометрических датчиков силы (фиг.10), например, LPA от «Токвес», закреплены «вверх ногами» на подвижной в поперечном направлении горизонтальной площадке, врезанной в прямоугольное окно грани, сформированной двухступенчатыми, поперечными балками лонжеронов-шпангоутов 6 (фиг.3) крыльев 1 (над каждым железнодорожным колесом 15, фиг.5). В момент, когда железнодорожные колеса 15 выпущены наружу и находятся на рельсах 16, ответная винтовая резьба (гайка) совместно с вертикальным рычагом-вилкой выкручены вниз. Нагрузка около 1/8 части веса транспортного средства давит на одно железнодорожное колесо 15, давит на вертикальный рычаг-вилку и давит на вертикальный винтовой вал мотор-редуктора. В верхней торцевой грани винтового вала мотор-редуктора имеется цилиндрическое углубление, в которое вставлен измерительный «грибок» тензометрического датчика. Давление силы около 1/8 части веса транспортного средства давит на «грибок» тензометрического датчика, который подключен к ПЛК. Так ПЛК получает полноценную информацию о нагрузке на каждое колесо и весе транспортного средства. Информация о загруженном весе транспортного средства обрабатывается в алгоритме ПЛК, где пропорционально весу вводятся поправки на движение элевонами и рулями направления (по тангажу, крену и рысканию) для более точного предстоящего полета. Становятся известными: возможная дозагрузка транспортного средства и неравномерность загрузки. Датчик скорости (не показан) это, оптический дискретный датчик, например: ВБО-М18-76К-5113-СА, установленный в нижней машинной части фюзеляжа 7 и направлен на боковую грань вертикальных столбов 19 (фиг.6). Шпалы 17 (фиг.5) и находящиеся на них вертикальные столбы 19 равноудалены. Прохождение фиксированного количества вертикальных столбов 19 эквивалентно пройденному расстоянию транспортного средства. Датчик скорости реагирует на каждый пройденный столб 19 и передает импульс в ПЛК. По полученным импульсам от датчика скорости за известное время ПЛК рассчитывает скорость движения транспортного средства. В транспортном средстве используют четыре энкодера - датчика углового перемещения, например: «Лир-ДА 119А» (фиг.10). Два энкодера, установлены на поворотных осях, жестко закрепленных к двум группам элевонов 2 левого и правого крыла. Другие два энкодера, установлены на поворотных осях, жестко закрепленных к двум рулям направления 5 (фиг.2, 7). Используемые энкодеры измеряют угол отклонения двух групп элевонов 2 (фиг.1, 7) и двух рулей направления 5, которые передают измеренные данные в ПЛК. По полученным данным ПЛК контролирует положение элевонов 2 и рулей направления 5 и при необходимости корректирует угол их отклонения, посылая сигналы управления в два частотных преобразователя управления элевонами 2 левого и правого крыла и в два частотных преобразователя управления рулями направления 5. Готовую электроэнергию для тяги транспортного средства создают, например: шесть тяговых инверторов. Тяговые индукторы 24 (фиг.6) подключены к тяговым инверторам (фиг.10 не показано), которые преобразуют постоянное напряжение, поступающее из питающей сети, например: 3000 В, в трехфазное переменное напряжение, например: 1750 В с необходимой частотой от 0 до 400 Гц. ПЛК управляет заданием скорости транспортного средства, созданием необходимой выходной частоты тяговых инверторов. Выходная частота тягового инвертора 0 герц соответствует заданию нулевой скорости, а 400 герц соответствует заданию максимальной скорости, например: 1850 км/час (1,5М). Тяговую силу и скорость транспортному средству создает бегущее с определенной частотой магнитное поле тяговых индукторов 24 электродвигателей, взаимодействующее с вторичными элементами 21. Чем выше задающая частота бегущего магнитного поля, тем больше тяговая сила и скорость. Радиоприемное устройство, например: GSM/GPRS-модем «SprutNet» версия RS232/RS485 для приема показаний от приближающегося анемометра - прибора определения скорости и направления ветра (фиг.9). Анемометры установлены равномерно, например: через каждый километр на всем пути движения транспортного средства. В ПЛК к разъему RS-485 подключена единая сеть, например с коммуникационным протоколом ModbusRTU (фиг.10). ПЛК имеет 8 аналоговых входов и 6 дискретных входов.
Предлагаемая система работает следующим образом. Транспортное средство начинает движение с аэропортовой остановки (точка 0, фиг.8). Тяговую силу придают боковые и верхние тяговые индукторы 24 (фиг.6) электродвигателей. Тяговые инверторы 73 (фиг.10) преобразуют постоянное напряжение, поступающее из питающей сети, например: 3000 В, в трехфазное переменное напряжение, например: 1750 В с необходимой частотой от 0 до 400 Гц и передают напряжение управляемой частоты в тяговые индукторы 24 (фиг.6). Зубцы сердечников тяговых индукторов (не показаны) и охватывающие их катушки с обмоточным проводом (не показаны) создают бегущее магнитное поле, пронизывающее вторичные элементы 21 и 23, которые представляют собой короткозамкнутую обмотку ротора в виде вертикальных полос и горизонтальной треугольной крыши из алюминия. Вертикальные полосы и горизонтальную треугольную крышу из алюминия перпендикулярно пронизывают силовые линии магнитного поля, выходящие из торцевых граней зубцов сердечников боковых и верхних тяговых индукторов 24 (фиг.6). По правилу Ленца каждый одинокий короткозамкнутый виток обмотки, пронизанный силовыми линиями магнитного поля, порождает ток, текущий противоположно току внутри катушки, вызвавшему появление этого магнитного поля. При работе обычного асинхронного электродвигателя ротор вращается из-за наводимых магнитным полем статора токов. В предлагаемых линейных асинхронных электродвигателях, статоры (боковые и верхние тяговые индукторы 24) выпрямлены в вертикальные и горизонтальную под углом менее 3° к горизонту линии в плоскости спереди. Роторы электродвигателей также выпрямлены в вертикальные и горизонтальные под углом менее 3° к горизонту линии (вторичные элементы 21 и 23) также в плоскости спереди. Боковые и верхние тяговые индукторы 24 электродвигателей наводят индукционные токи во вторичных элементах 21 и 23. Это превращает электрическую энергию течения тока в катушках с обмоточным проводом внутри боковых и верхних тяговых индукторов 24 в наведенную электрическую энергию течения тока по вторичным элементам 21 и 23. Эта наведенная электрическая энергия превращается в механическую энергию перемещения боковых и верхних тяговых индукторов 24 продольно относительно вторичных элементов 21 и 23. В целом создается тяговая сила для движения транспортного средства. Вторичные элементы 21 выше, чем зубцы сердечника боковых тяговых индукторов 24 на высоту подъема транспортного средства более чем на 120 мм. Для взаимодействия бегущего магнитного поля, создаваемого зубцами сердечников боковых тяговых индукторов 24 с вторичными элементами 21 в любой момент времени (взлет, посадка, полет) площадь поперечного сечение зубцов сердечников боковых тяговых индукторов 24 противостоит сечению вторичных элементов 21 (фиг.6).
Начало движения транспортного средства сопровождается опусканием элевонов 2 (фиг.1,7), которые на взлете выполняют функцию закрылков и способствуют взлету транспортного средства с более короткой дистанции. Все элевоны 2 на взлете опускаются, например: на угол 20 градусов. Увеличение скорости сопровождается увеличением частоты бегущего магнитного поля, создаваемого обмотками боковых и верхних тяговых индукторов 24 (фиг.6), что приводит к разбегу транспортного средства (от точки 0 до точки D фиг.8), с одновременным разгоном до скорости, например: выше 300 км/час. Так как крылья 1 совместно с опущенными элевонами 2 в роли закрылков, при скорости около 300 км/час создают подъемную силу для подъема носовой части транспортного средства, то в точке D происходит отрыв передних железнодорожных колес 15 от железнодорожных рельсов 16 (фиг.5). Постепенно происходит подъем носовой части транспортного средства, сопровождающийся касанием верхних роликов 26 швеллеров 22. Через долю секунды верхние ролики 26 катятся по внутреннему желобу швеллеров 22. Происходит быстрый подъем после разгона и отрыв транспортного средства в силу того, что в покое транспортное средство имеет расстояние от верхней точки верхних роликов 26 до плоскости желоба швеллеров 22 около 120 мм. В результате дальнейшего подъема, через несколько секунд произойдет отрыв задних железнодорожных колес 15 от железнодорожных рельсов 16. Еще через долю секунды произойдет касание всех, например: шестнадцати верхних роликов 26 со швеллерами 22. Спустя долю секунды все 16 верхних роликов 26 станут катиться по внутреннему желобу швеллеров 22. После взлета транспортного средства в точке D элевоны 2 перестают выполнять функцию закрылков и поднимаются в горизонтальное положение. Далее элевоны 2 начинают выполнять функции рулей высоты и элеронов. После прохождения точки D, транспортное средство продолжает ускоряться и увеличивать скорость. Для управления полетом используют систему автоматического пилотирования, состоящую из аппаратной и программной части. Система управляет: скоростью, взлетом, посадкой, тангажем, креном, рысканием, выравнивает траекторию полета на высоту около середины от максимального подъема, около 60 мм от состояния покоя транспортного средства (точка Е фиг.8). Система также управляет: горизонтальным расположением в полете, зазором между верхними тяговыми индукторами 24 и вторичным элементом 23, зазором между боковыми тяговыми индукторами 24 и вторичными элементами 21, регулированием высоты щеток вращения 25, регулированием ширины расположения железнодорожных колес 15, и другими вспомогательными системами (охлаждением и подобным). В точке Е (фиг.8) транспортное средство переходит в горизонтальный полет и его вес опирается на крылья 1. После прохождения точки Е продолжается разгон, до крейсерской скорости около 1500 км/час (1,2М). Мотор-редукторы поднимают вертикальные рычаги-вилки (не показаны), а с ними и железнодорожные колеса 15 после взлета транспортного средства. После подъема вертикальных рычагов-вилок и железнодорожных колес 15 производится закрытие амбразур, подобно подъему и закрытию шасси в классическом самолете для снижения сопротивления воздуха. Амбразуры закрываются, например: втягивающим электромагнитным цилиндром (не показано). Полет продолжается в воздухе до точки Р(фиг.8), например: дальностью 2000 километров, где происходит плавное снижение частоты бегущего магнитного поля боковых и верхних тяговых индукторов 24 (фиг.6) электродвигателей, до полного отключения, сопровождающееся снижением скорости транспортного средства. Снижение скорости корабля достигается включением рекуперативного торможения, при котором в боковых и верхних тяговых индукторах 24 вынужденным, продольным движением вторичных элементов 21 и 23 (фиг.6) наводится бегущее магнитное поле, которое подготавливается до качественных параметров и затем поступает в питающую сеть. При снижении скорости до 500 км/час начинается открытие амбразур для выпуска железнодорожных колес 15 наружу. Винтовые валы мотор-редукторов вывинчивают вниз ответную винтовую резьбу совместно с вертикальными рычагами-вилками, в которых жестко закреплены опорные подшипники, удерживающие оси железнодорожных колес 15. От точки 3 до точки G (фиг.8) транспортное средство планирует в воздухе, например: дальностью 50 метров. В точке G происходит касание железнодорожных колес 15 с железнодорожными рельсами 16 (фиг.5). В случае аварийного не выхода, колес 15 наружу, транспортное средство садится нижней частью верхних роликов 26 на внутренние грани нижней полки балки 12 (фиг.6). Разница в пробеге между первыми коснувшимися колесами 15 и последними коснувшимися колесами 15 составит, например: 50 метров. Затем начинается пробег транспортного средства на всех восьми колесах 15, до полной остановки в точке Н (фиг.8). Во время пробега транспортного средства после касания до полной остановки также в боковых и верхних тяговых индукторах 24 продольным движением вторичных элементов 21 и 23 наводится бегущее магнитное поле. Наведенное магнитное поле в боковых и верхних тяговых индукторах 24 (фиг.6), вызывает рекуперативное торможение транспортного средства с выдачей сгенерированной энергии в питающую сеть. Такое торможение экономически выгодно, так как позволяет экономить электроэнергию. При движении транспортного средства воздух, заходит через щели в двойной обшивке фюзеляжа 7 и попадает в прямоточные каналы, за счет разряжения вызванного работой трубок Вентури 10 (фиг.1,2,3,5,7). Воздух из атмосферы сопутно полету транспортного средства заходит в круглое сечение трубок Вентури 10. Движущиеся навстречу воздуху трубки Вентури 10 совершают работу по ускорению сопутного потока воздуха, за счет сужения входящего потока воздуха в конусных конфузорах (не показаны). После прохождения конусного конфузора в каждой трубке Вентури 10 ускоренный поток воздуха захватывает, заходящий тангенциально воздух из прямоточных каналов и выбрасывает его за пределы трубки Вентури 10. Тем самым в прямоточном канале создается разряжение и происходит отсасывание пограничного слоя воздуха над крыльями 1 и над обшивкой задней части фюзеляжа 7, что приводит к созданию ламинарного потока воздуха над крыльями и фюзеляжем без завихрений и многократно снижает лобовое сопротивление. Трубки Вентури 10 организованы в три цилиндрических ряда, которые равноудалены друг от друга на угол 120 градусов, внутри большого круга фюзеляжа 7, фиг.3. Каждый ряд трубок Вентури содержит от двух до N трубок Вентури для более производительного отсасывания пограничного слоя воздуха. Верхний центральный ряд трубок Вентури, например: отсасывает пограничный слой воздуха над обшивкой задней части фюзеляжа 7. Нижний левый ряд трубок Вентури 10 производит отсасывание пограничного слоя воздуха над левым крылом, а правый ряд трубок Вентури соответственно производит отсасывание пограничного слоя воздуха над правым крылом. Распараллеливание задач в работе оборудования приводит к высокой надежности работы транспортного средства.
Побочно небольшой размах крыльев 1 в сочетании с небольшой высотой вертикальных килей 3 дает перспективы создания пути для полета транспортного средства в туннелях между материками, островами и широкими реками (пунктирная линия от точки Н, фиг.8). Энергия, расходуемая непосредственно транспортно-энергетической системой в местах, где светит солнце, составляет 1,44% от общей энергии вырабатываемой солнечными батареями 30 (фиг.2, 3). Оставшиеся 98,56% энергии передается по стандарту HVDC (DINEN 60633-2016 Terminologyforhigh-voltagedirectcurrent (HVDC) transmission (IEC 60633:1998 + A1:2009 + A2:2015 https://en.wikipedia.org/wiki/High-voltage direct current в страны, где уже село солнце. Передача энергии постоянным током высокого напряжения в страны, где уже село солнце необходимо для работы транспортно-энергетической системы и для дальнейшего использования полученной энергии (фиг.9, табл.1,2,3,4). Полученную энергию от солнечных батарей 30 на дальние расстояния передают две линии передачи энергии постоянным током высокого напряжения (VHDC) (плюсовые фазы: 32, 33, 34, 35, фиг.1,2,4,7) с объединенными минусами: 31, 36 на фиг.1,2,4,7. Непосредственно транспортное средство работает от разности потенциалов между плюсовыми фазами:3 2 - 33и34-35.
При необходимости езды по нестандартной железнодорожной колее конструкция узлов железнодорожных колес может обеспечить изменение расстояние между колесами.
Заявляемая система может использоваться следующим образом.
- В качестве скоростного пассажирского междугородного и международного транспорта, экспресс доставки почты и грузов весом до 50 тонн. Для международных перевозок рычаги-вилки можно оборудовать механизмом для перестроения ширины железнодорожных колес под ширину железнодорожной колеи. Станет возможным проезд грузовых и пассажирских поездов без смены колесных пар на границе, что приведет к экономии времени и денег.
- Совместно с железнодорожным транспортом на одном пути.
-Для транспортировки электроэнергии на дальние расстояния. Загрузка линии передачи энергии по стандарту HVDC от солнечных батарей заявляемой системы составит 10%, а остальные 90% можно передавать на дальние расстояния по другим коммерческим проектам, что открывает перспективы быстрой окупаемости вложенных капиталовложений.
- Для тушения лесных пожаров. Когда транспортное средство прибывает на место тушения пожара, то каждый иллюминатор открывается, из него целится пусковая установка, начиненная, например: углекислотными снарядами и производится последовательный залп по горящему лесу.
- Для доставки медикаментов и специалистов к местам эпидемий, эвакуации населения из мест бедствия, экспресс доставки скоропортящихся продуктов питания, например: молока, мяса, и других, скорой помощи пострадавшим с доставкой в больницы.
- Для создания альтернативы морских перевозок странам, не имеющим выхода к морю, например Монголия, Узбекистан, Таджикистан и другим.
В предлагаемой системе транспортная линия пути является единой, что снимает преграды для взаимоотношений между странами.
Реферат
Изобретение относится к рельсовым транспортным комбинированным высокоскоростным системам, обладающим характеристиками поезда и самолета, и может быть использовано для перевозки пассажиров, экспресс-доставки почты, грузов и другого на дальние расстояния. Сухопутная неразрывная транспортно-энергетическая система содержит транспортное колесное средство с крыльями, приводимое в движение электродвигателями с возможностью передвижения по рельсам и воздуху, и включающее ограничители высоты подъема в полете, устройства для автоматического управления подъемной силой и равновесием в полете, расположенные на крыльях, узел соединения электродвигателей с транспортным средством. Транспортное средство выполнено в виде планера в едином корпусе – фюзеляже, в котором расположены трубки Вентури, ограничители высоты подъема в полете выполнены в виде ограничительных роликов, а узел соединения электродвигателей с транспортным средством расположен внутри фюзеляжа в сквозном продольном пазу, основная часть периметра которого образована активными элементами электродвигателей, включает строительную балку, внутри которой установлен проводник и щетки вращения, контактирующие с проводником, являющимся направляющей для качения ограничительных роликов. Все электродвигатели выполнены линейными, узлы железнодорожных колес выполнены убираемыми. Солнечные батареи являются автономным источником питания системы, энергия, полученная от солнечных батарей, расходуется непосредственно в местах, где светит солнце, а также передается в места, где солнце уже село. В результате повышается скорость движения транспортного средства при экономии электроэнергии и упрощении конструкции. 1 з.п. ф-лы, 10 ил.
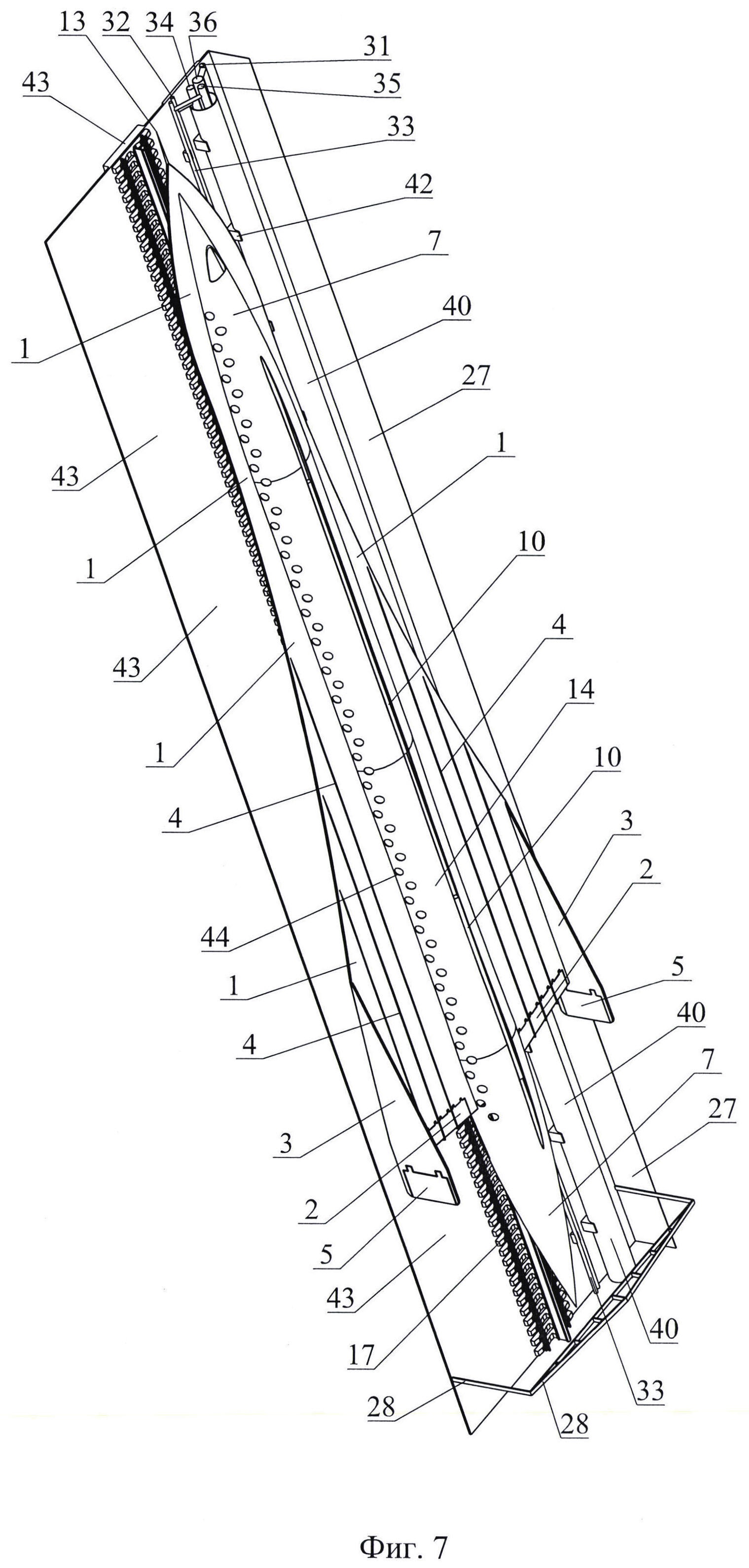
Комментарии