Система управления безопасностью седельно-сцепного устройства - RU2673583C2
Код документа: RU2673583C2
Чертежи


Описание
Область техники, к которой относится изобретение
Настоящее изобретение в общем относится к системе управления безопасностью седельно-сцепного устройства и, в частности, к системе для контроля за системой соединения седельно-сцепного элемента прицепа и предоставления или передачи информации о статусе соединения сцепного элемента оператору транспортного средства.
Сущность изобретения
Одним аспектом настоящего изобретения является предложить систему управления установкой сцепного элемента прицепа, предназначенную для контроля за узлом сцепления с прицепом и имеющую приемный элемент для приема сцепного элемента прицепа и механизм фиксации для фиксации сцепного элемента в приемном элементе для сцепного элемента, причем система определяет, правильно ли соединен сцепной элемент с узлом сцепления с прицепом, и содержит датчик прицепа для определения положения прицепа относительно узла сцепления с прицепом и датчик фиксации для определения положения механизма фиксации. Система дополнительно содержит клапан управления, соединенный с узлом тормоза прицепа по текучей среде, причем клапан управления выполнен с возможностью приведения в действие между закрытым положением, при котором узел тормоза находится в задействованном положении, и в открытое положение, при котором в узел тормоза подается текучая среда и узел тормоза находится в незадействованном положении, причем узел тормоза принудительно нагружен из незадействованного положения в задействованное положение. Система дополнительно содержит контроллер, соединенный с датчиком прицепа, датчиком фиксации и клапаном управления для определения того, правильно ли соединены узел сцепления с прицепом и сцепной элемент, и генерирования управляющего сигнала для клапана управления с целью перевода этого клапана из открытого положения в закрытое положение, когда узел сцепления с прицепом и сцепной элемент соединены неправильно, в результате чего узел тормоза остается в задействованном положении.
Основной задачей настоящего изобретения является предложить систему управления установкой сцепного элемента прицепа, которая предотвращает перемещение оператором буксируемого транспортного средства, если не обеспечен правильный статус соединения, за счет сохранения заблокированного состояния тормозов буксируемого транспортного средства до тех пор, пока не будет обеспечен удовлетворительный статус соединения. Результатом применения настоящего изобретения может стать общее снижение стоимости эксплуатации за счет уменьшения или устранения ущерба, причиняемого буксируемым транспортным средствам, буксирующим транспортным средствам и продукции, находящейся в буксируемых транспортных средствах, из-за аварий, связанных с плохим или неподходящим соединением буксирующего и буксируемого транспортных средств, это изобретение позволяет предоставить важную информацию оператору транспортного средства в виде обратной связи, и оно очень хорошо подходит для предлагаемого варианта использования.
Эти и другие признаки, преимущества и задачи настоящего изобретения станут более понятными и очевидными для специалистов в данной области техники при ознакомлении с приведенным далее описанием, приложенными чертежами и пунктами Формулы изобретения.
Краткое описание чертежей
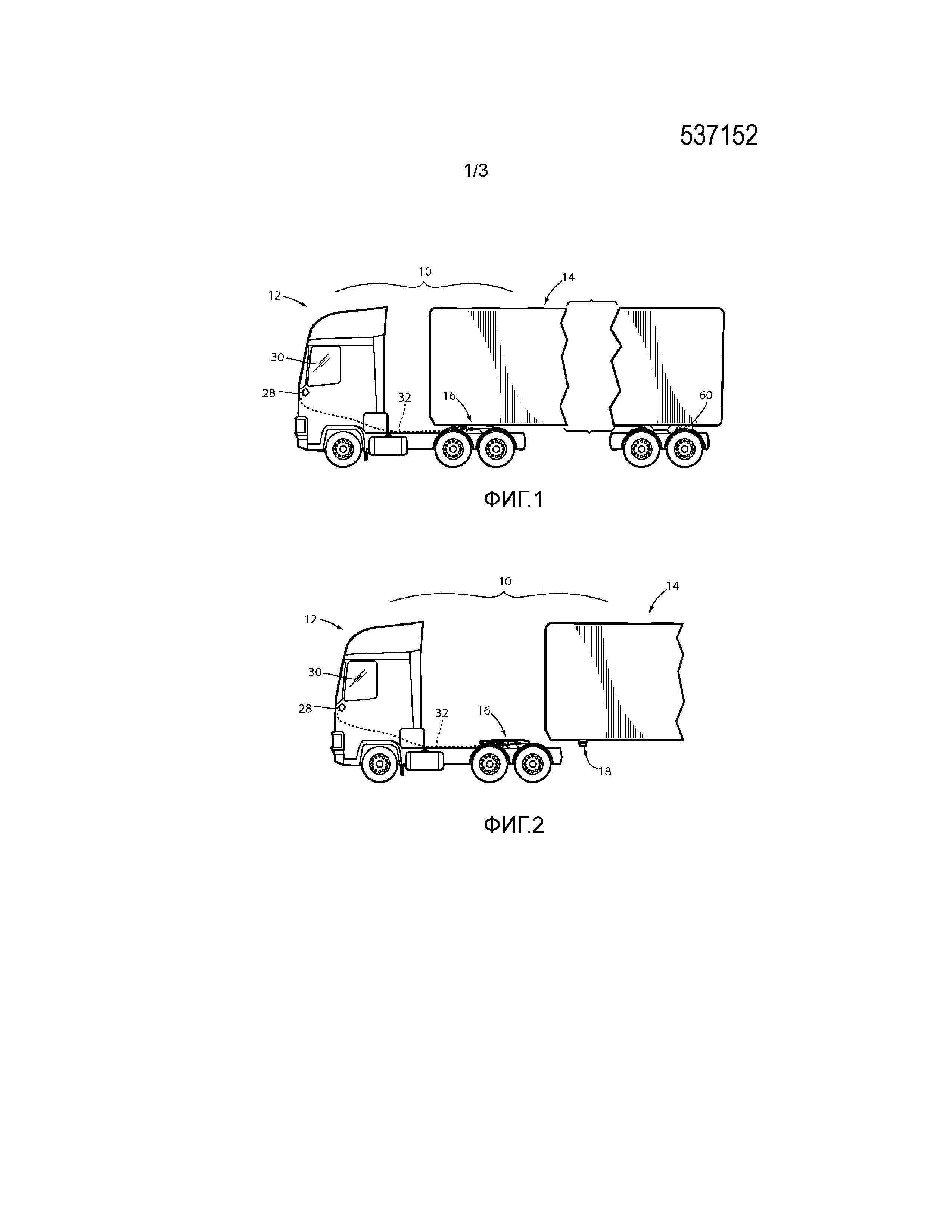
На Фиг.1 приведен вид сбоку комбинации "тягач-прицеп", находящейся в соединенном состоянии;
на Фиг.2 приведен вид сбоку комбинации "тягач-прицеп", показанной на Фиг.1, находящейся в разъединенном состоянии;
на Фиг.3 приведен вид снизу узла сцепления седельного типа;
на Фиг.4 приведен вид сбоку узла сцепления, показанного на Фиг.3;
на Фиг.5 приведен вид сбоку с местным разрезом узла сцепления, показанного на Фиг.3; и
на Фиг.6 схематично показана система управления безопасностью седельно-сцепного устройства, в которой воплощено настоящее изобретение.
Подробное описание предпочтительного варианта реализации
В целях приведенного здесь описания термины "верхний", "нижний", "правый", "левый", "задний", передний", "вертикальный", "горизонтальный" и их производные будут относиться к изобретению в ориентации, показанной на Фиг.1 и 3. Однако необходимо понимать, что изобретение может иметь различные альтернативные ориентации и последовательности этапов, если явным образом не указано иное. Также необходимо понимать, что конкретные устройства и способы, изображенные на приложенных чертежах и описанные в приведенной далее спецификации, являются примерными вариантами реализации новаторских принципов, определенных в пунктах приложенной Формулы изобретения. Как следствие, конкретные размеры и другие физические характеристики, относящиеся к рассмотренным здесь вариантам, не должны считаться накладывающими ограничения, если только в пунктах Формулы изобретения явным образом не указано иное.
Ссылочным номером 10 (Фиг.1 и 2) в общем обозначена комбинация "тягач-прицеп", где тягач 12 представляет собой буксирующее транспортное средство, а прицеп 14 представляет собой буксируемое транспортное средство. Тягач 12 включает узел сцепления с прицепом, в общем представленный узлом 16 сцепления седельного типа, в то время как прицеп 14 включает сцепной элемент, в общем представленный шкворнем 18. Узел 16 сцепления седельного типа включает основание 20, неподвижно установленное на элементе 22 рамы тягача 12, пластину 24 сцепления седельного типа, с возможностью шарнирного поворота установленную на поперечной оси на основании 20, и механизм 26 фиксации, предназначенный для фиксации шкворня 18 в определенном положении. Система управления безопасностью седельно-сцепного устройства в предпочтительном случае включает множество датчиков, установленных в узле 16 сцепления седельного типа, и устройство указания статуса, или визуальный интерфейс, в общем представленный монитором 28, установленным на приборной панели в кабине 30 тягача 12, при этом датчики соединены с устройством указания статуса кабелем 32. В предпочтительном случае датчики, установленные в узле 16 сцепления, включают датчик 34 шкворня и датчик 36 фиксации. В ином случае также может применяться датчик близости прицепа, например, датчик 38 перемещения пластины сцепления. В изображенном примере датчики 34, 36, 38 представляют собой бесконтактные индуктивные датчики, однако также можно применить и другие подходящие датчики, известные в данной области техники. Хотя датчик 38 перемещения описан далее как датчик перемещения пластины сцепления седельного типа, датчик 38 перемещения может быть установлен в других местах, пока этот датчик по-прежнему обнаруживает близость прицепа 14 к узлу 16 сцепления.
На Фиг.3 приведен вид снизу примерной пластины 24 сцепления седельного типа, при этом датчик 38 перемещения пластины сцепления установлен на фланце 40 пластины 24 сцепления таким образом, чтобы измерительный конец этого датчика был обращен наружу, в направлении, перпендикулярном осям 42 шарниров (Фиг.4) пластины 24 сцепления. На Фиг.4 пластина 24 сцепления показана сбоку вместе с основанием 20 в соединенном горизонтальном положении А и разъединенном положении B покоя (пунктирными линиями). Установка металлической пластины 44 на раме 22 в положении рядом с тем местом, где располагается измерительный конец датчика 38, когда пластина 24 сцепления находится в положении B покоя, позволяет при помощи датчика 38 перемещения пластины сцепления обнаруживать присутствие пластины 44 в качестве основания для определения того, что пластина сцепления находится в наклоненном положении покоя. Когда тягач 12 перемещается назад под прицеп 14, между наклоненной пластиной сцепления и частью прицепа 14 возникает контакт. Этот контакт вызывает поворот пластины 24 сцепления в соединенное положение. Когда датчик 38 затем обнаруживает отсутствие пластины 44, можно сделать вывод, что пластина 24 сцепления перемещена из своего положения покоя, и что прицеп 14 находится в непосредственной близости к узлу 16 сцепления. Отметим, что датчик 38 также может быть установлен таким образом, чтобы он обнаруживал металл, когда пластина 24 сцепления находится в горизонтальном соединенном положении.
Датчик 34 шкворня установлен на пластине 24 сцепления таким образом, что его измерительный конец расположен рядом с горловиной 46, созданной в пластине 24 сцепления, в которой располагают и фиксируют шкворень 18 прицепа. На Фиг.5 приведен вид сбоку с местным разрезом в перевернутом положении, который иллюстрирует положение шкворня 18, когда он правильно установлен внутри горловины 46. Конструкция является такой, что датчик 34 шкворня выводит сигнал обнаружения, когда металлический нижний буртик шкворня 18 располагается в горловине 46.
Узел 16 сцепления седельного типа дополнительно включает механизм 26 фиксации, который перемещается пружинами, работающими на сжатие, для автоматической фиксации и закрепления шкворня 18 прицепа, как только шкворень входит в горловину 46. В примере, изображенном на Фиг.5, датчик 36 фиксации установлен на пластине 24 сцепления таким образом, что его измерительный конец расположен в непосредственной близости к тому месту, где находится металлическая пластина 48 механизма 26 фиксации в положении фиксации. Таким образом, датчик 36 фиксации обнаруживает присутствие пластины 48 как основание для определения того, что механизм 26 фиксации находится в состоянии фиксации и закрепления. Хотя на Фиг.3 изображен конкретный механизм фиксации, специалистам в данной области техники будет очевидно, что настоящее изобретение может быть использовано вместе с механизмом фиксации любого типа, и что датчик 36 фиксации может быть установлен таким образом, чтобы определять относительное положение других компонентов изображенного механизма 26 фиксации, например, фиксирующих захватов 50, а также кулачка или кулачков, которые приводят их в действие. Нужно также отметить, что настоящее изобретение может быть применено для узлов сцепления, имеющих другую конструкцию, и оно не ограничивается узлом сцепления седельного типа и приведенными для него в качестве примера местами установки.
Как схематично показано на Фиг.6, система управления безопасностью седельно-сцепного устройства, соответствующая настоящему изобретению, включает комплект 52 датчиков седельного сцепления, который содержит датчик 34 шкворня и датчик 36 фиксации. Хотя в непосредственном примере это не изображено, комплект 52 датчиков может также содержать датчик 38 перемещения пластины сцепления. Кроме того, в системе управления могут применяться группы датчиков и средств контроля для наблюдения за соответствующими компонентами и управления ими, как описано в патенте США № 5,861,802, выданном на имя Hungerlink et al, и патенте США № 6,452,485, выданном на имя Schutt et al, содержание которых этих упоминанием включено сюда во всей полноте. Комплект 52 датчиков соединен с контроллером 54 (или модулем управления) посредством кабеля 32. Контроллер 54 определяет, правильно ли соединен узел 16 сцепления седельного типа со шкворнем 18, на основе показаний датчиков 34, 36. Контроллер 54 посредством кабеля 56 с возможностью обмена информацией соединен с клапаном управления, в общем представленным электромагнитным клапаном 58. Клапан 58 управления соединен с узлом 60 парковочного или аварийного тормоза (Фиг.1 6) прицепа 14 с возможностью перемещения между ними текучей среды. Клапан 58 управления выполнен с возможностью установки в закрытое положение, при котором узел 60 тормоза находится в задействованном положении и предотвращает перемещение прицепа 14, и в открытое положение, при котором в узел 60 тормоза подается текучая среда под давлением, например, воздух, и узел 60 тормоза находится в незадействованном положении, что позволяет прицепу 14 свободно перемещаться. Узел 60 тормоза принудительно нагружен из незадействованного положения в задействованное положения, способ обеспечения такого нагружения хорошо известен в данной области техники. Хотя она описана здесь применительно к узлу парковочного и аварийного тормоза, система управления, соответствующая настоящему изобретению, может также использоваться с тормозными системами других конфигураций.
Во время работы оператор позиционирует тягач 12 относительно прицепа 14 таким образом, чтобы шкворень 18 установился в горловину 46 пластины 24 сцепления. Затем шкворень 18 фиксируется в горловине 46 пластины 24 сцепления механизмом 26 фиксации, при этом датчик 34 шкворня определяет, правильно ли расположен шкворень 18 в горловине 46, и датчик 36 фиксации определяет, правильно ли зафиксировал механизм 26 фиксации шкворень 18 в горловине 46. Затем оператор выходит из кабины 30 и соединяет линии гидравлической связи или линии подачи воздуха между тягачом 12 и прицепом 14, возможно, разрешая перевод узла 60 тормоза в незадействованное положение. Оператор возвращается в кабину 30 и затем может попытаться перевести узел 60 тормоза в незадействованное положение путем приведения в действие управляемого оператором клапанного узла 61, установленного на линии между источником 62 текучей среды под давлением, как правило, связанным с тягачом 12, и клапаном 58 управления. Одновременно с этим датчик 34 шкворня и датчик 36 фиксации по кабелю 32 посылают сигналы в контроллер 54. Если контроллер 54 определяет, что произошло неправильное соединение узла 16 сцепления седельного типа и шкворня 18, этим контроллером генерируется управляющий сигнал, который передается в клапан 58 управления, чтобы перевести этот клапан из открытого положения в закрытое положение, что предотвращает поступление текучей среды под давлением из источника 62 текучей среды под давлением в узел 60 тормоза прицепа 14, в результате чего узел 60 тормоза остается в задействованном положении и предотвращает перемещение прицепа 14. Если контроллер 54 определяет, что обеспечено правильное соединение узла 16 сцепления и шкворня 18, этот контроллер не генерирует управляющий сигнал для клапана 58 управления, и этот клапан остается открытым, и в результате узел 60 тормоза прицепа 14 остается в незадействованном положении, что позволяет прицепу 14 перемещаться.
В качестве альтернативы, система может включать интерфейсный компонент 27, выполненный с возможностью сообщать статус соединения шкворня 18 с узлом 16 сцепления оператору. В изображенном примере интерфейсный компонент 27 включает визуальный интерфейс или монитор 28 на приборной панели, чтобы обеспечить визуальную обратную связь по состоянию группы датчиков для оператора транспортного средства. Если говорить конкретно, монитор 28 может быть выполнен с возможностью предоставления визуальной обратной связи, например, "зеленого" сигнала для указания оператору, что обеспечено правильное соединение узла 16 сцепления и шкворня 18, и что узел 60 тормоза прицепа 14 выведен из задействованного положения; "красный" сигнал для указания того, что правильное соединение узла 16 сцепления и шкворня 18 не обеспечено, и что узел 60 тормоза прицепа 14 остается в задействованном положении; и "желтый" сигнал для указания того, что система в целом находится в состоянии готовности к соединению, и что оператор может попытаться соединить тягач 12 с прицепом 14. Разумеется, сигналы цветового кодирования могут быть заменены текстовыми или другими визуальными индикаторами и/или звуковым сигналами.
В дополнительном альтернативном варианте система может включать ввод 64 ручной отмены, с возможностью обмена информацией соединенный с контроллером 54 посредством кабеля 66, причем ввод 64 отмены позволяет оператору отменить управляющий сигнал, заставляющий клапан 58 управления оставаться в закрытом положении. Этот сигнал отмены может потребоваться, чтобы устранить ситуацию, когда неисправная группа датчиков заставляет узел 60 тормоза прицепа 14 оставаться в задействованном положении, даже если обеспечено правильное соединение узла 16 сцепления и шкворня 18. Хотя на Фиг.6 изображено, что ввод 64 отмены расположен внутри кабины 30 тягача 12, заметим, что ввод 64 отмены можно располагать в положении снаружи кабины 30, что потребует от оператора выйти из кабины 30 и визуально проверить статус соединения узла 16 сцепления и шкворня 18 перед выводом тормоза из задействованного положения путем отмены.
Из приведенного выше описания специалисты в данной области техники легко поймут, что в изобретение могут быть внесены модификации, не нарушающие рассмотренные здесь принципы. Такие модификации должны считаться включенными в пункты приведенной далее Формулы изобретения, если только в этих пунктах явным образом не сказано иное.
Реферат
Изобретение относится к системе для контроля за системой соединения седельно-сцепного элемента прицепа. Система управления установки сцепного элемента прицепа, предназначенная для контроля за узлом сцепления с прицепом, имеющим приемный элемент для приема сцепного элемента прицепа и механизм фиксации для фиксации сцепного элемента в приемном элементе для сцепного элемента. Система содержит датчик сцепного элемента, датчик фиксации, клапан управления и контроллер. Датчик сцепного элемента предназначен для определения положения сцепного элемента относительно узла сцепления с прицепом. Клапан управления выполнен с возможностью приведения в действие между закрытым положением, при котором узел тормоза находится в задействованном положении, и открытым положением, при котором текучая среда под давлением подается в узел тормоза и узел тормоза находится в незадействованном положении. Контроллер соединен с датчиком сцепного элемента, датчиком фиксации и клапаном управления. Достигается повышение точности определения, правильно ли соединен сцепной элемент с узлом сцепления с прицепом. 18 з.п. ф-лы, 6 ил.
Комментарии