Способ контроля шины при движении автомобиля и система для его осуществления - RU2317219C2
Код документа: RU2317219C2
Чертежи


Описание
Область техники
Настоящее изобретение относится к способу (текущего) контроля поведения шины при движении автомобиля, оснащенного шинами, и к системе для его осуществления. Настоящее изобретение также относится к способу контроля состояния транспортного средства.
Предшествующий уровень техники
Системы контроля с использованием акселерометров, расположенных в шинах, уже были предложены.
В заявке на патент ЕР 887211 раскрыта система контроля шины транспортного средства, содержащая датчик, в рабочем положении установленный в шине для создания электрического импульса при прохождении пятна контакта с опорной поверхностью, соответствующего деформации шины, средство для вычисления отношения длительности указанного электрического импульса к длительности одного оборота шины, средство для передачи значения этого отношения в блок обработки, расположенный в транспортном средстве. Датчик расположен на участке протектора шины, чтобы электрический импульс имел первое максимальное значение на входе и второе максимальное значение на выходе из пятна контакта с опорной поверхностью. Датчиком может быть акселерометр, который измеряет интенсивность ускорения, испытываемого протектором. Целью решения, описанного в указанной заявке на патент №887211, является осуществление текущего контроля деформации шины для получения оптимальных характеристик, в частности для шин грузовых автомобилей.
В патенте США №6204758 раскрыто устройство контроля шины для использования в дистанционной системе текущего контроля шины, включающей акселерометр для выявления ускорения устройства текущего контроля шины. Информацию о местоположении устройства текущего контроля шины получают на основе ускорения. Таким образом, информацию о положении шины получают автоматически, что позволяет системе отображать данные о характеристиках шины, таких как давление воздуха, в связи с положением шины. Более конкретно, устройство для текущего контроля шины включает корпус и шток клапана и конфигурировано для установки на колесе транспортного средства. Шток клапана может открываться для впуска воздуха, заполняющего шину, и для осуществления вручную проверок давления в шине. В других случаях шток клапана обычно остается закрытым для герметизации шины. Устройство текущего контроля шины включает радиальный акселерометр, тангенциальный акселерометр, акселерометр рыскания и датчик давления.
В международной заявке на патент РСТ №98/56606 раскрыт способ текущего контроля шины движущегося автомобиля и, в частности, устройство, содержащее датчик, установленный на колесе, соединительное средство, передающее в транспортное средство показания, полученные от датчика, и средство питания. Датчик представляет собой чувствительный к ускорению миниатюрный датчик, вмонтированный в протектор шины или вблизи него. Соединительное средство, установленное на колесе, передает показания измерений, осуществляемых при вхождении протектора в контакт с опорной поверхностью. В заявке рассматривается шина, имеющая радиус R, движущаяся со скоростью V. Участок ВС шины, имеющий длину L, входит в контакт с опорной поверхностью под нагрузкой. В точке А вне участка ВС центробежное радиальное ускорение составляет V2/R. С другой стороны, между точками В и С центробежное радиальное ускорение по существу равно нулю, так как дифференциальная скорость шины относительно опорной поверхности по существу равна нулю. Благодаря помещению в шину акселерометра можно контролировать участок ВС. Целью измерения такого типа является выявление возможного недостаточного давления в шине.
Краткое изложение сущности изобретения
Задачей настоящего изобретения является создание способа контроля динамического поведения шины, установленной на транспортном средстве. Более конкретно, задачей изобретения является получение информации от катящейся шины, установленной на транспортном средстве, которую можно использовать
а) для выявления маневра, который осуществляется транспортным средством (например, поворот, торможение и т.д.),
b) для выявления достижения критического состояния при выполнении указанного маневра,
с) в случае, указанном в пункте b), для генерирования сигнала, предназначенного для вызова противодействия для управления транспортным средством, например сигнала предупреждения для водителя или сигнала, предназначенного для приведения в действие системы автоматического управления транспортным средством.
Было обнаружено, что измерения, осуществляемые датчиками ускорения, расположенными в районе протектора шины, позволяют получать такую информацию. Такую информацию можно получать с использованием по меньшей мере двух датчиков ускорения, расположенных по существу вдоль одной меридиональной плоскости шины, то есть плоскости, включающей ось вращения шины в районе протектора шины. Датчики ускорения выдают сигналы, представляющие деформации во всем районе взаимодействия между шиной и опорной поверхностью. Анализ изменений во время деформаций позволяет определять выполняемый маневр. В предпочтительном варианте осуществления изобретения, в районе протектора шины располагают три датчика ускорения, находящихся по существу в одной меридиональной плоскости, причем первый датчик располагают по существу на экваториальной плоскости шины, а другие два располагают в плечевых зонах участка протектора (то есть участках протектора, находящихся между экваториальной плоскостью и боковинами шины).
Поставленная задача решена путем создания способа контроля движущейся шины, имеющей участок протектора, заключающегося в том, что
получают и сохраняют по меньшей мере временно первую кривую, представляющую собой профиль ускорения первой точки участка протектора шины, находящейся на меридиональной плоскости шины,
получают и сохраняют по меньшей мере временно по меньшей мере вторую кривую, представляющую собой профиль ускорения второй точки участка протектора шины, находящейся по существу на меридиональной плоскости,
сравнивают первую и вторую кривые или выведенные по ним параметры и определяют динамическое поведение шины.
Предпочтительно, способ дополнительно содержит следующую операцию:
получают и сохраняют по меньшей мере временно по меньшей мере третью кривую, представляющую собой профиль ускорения третьей точки участка протектора шины, находящейся по существу на меридиональной плоскости.
Операция сравнения может содержать сравнение указанных первой, второй и третьей кривых или выведенных по ним параметров.
Предпочтительно, первая точка находится в первой плечевой зоне участка протектора.
Предпочтительно, вторая точка находится во второй плечевой зоне участка протектора, противоположной первой плечевой зоне относительно экваториальной плоскости шины.
Третья точка может находиться по существу на экваториальной плоскости шины.
В предпочтительных вариантах осуществления изобретения первая, вторая и третья точки находятся на внутренней поверхности шины.
Предпочтительно, операция сравнения содержит сравнение расстояния между характеристическими пиками первой кривой с расстоянием между соответствующими пиками второй кривой.
В альтернативном варианте операция сравнения может содержать сравнение первой кривой и второй кривой по точкам для полного оборота шины.
В альтернативном варианте операция сравнения может содержать сравнение по меньшей мере одного характеристического пика первой кривой с соответствующим по меньшей мере одним пиком второй кривой.
В частности, операция сравнения может содержать сравнение амплитуды по меньшей мере одного пика первой кривой с амплитудой соответствующего по меньшей мере одного пика второй кривой.
В альтернативном варианте операция сравнения может содержать сравнение площади под по меньшей мере частью первой кривой с площадью под соответствующей частью второй кривой.
В альтернативном варианте операция сравнения может содержать сравнение ширины по меньшей мере части первой кривой с шириной соответствующей части второй кривой.
Вторым объектом настоящего изобретения является шина, содержащая по меньшей мере первую группу датчиков, расположенных в первом положении по окружности шины, причем первая группа датчиков включает
первый датчик ускорения, соединенный с первой точкой участка протектора шины, находящейся на меридиональной плоскости шины,
по меньшей мере второй датчик ускорения, соединенный со второй точкой участка протектора шины, находящейся по существу на меридиональной плоскости.
Предпочтительно, первая группа датчиков включает по меньшей мере третий датчик ускорения, соединенный с третьей точкой участка протектора шины, находящейся по существу на меридиональной плоскости.
Предпочтительно, первая точка находится в первой плечевой зоне участка протектора.
Предпочтительно, вторая точка находится во второй плечевой зоне участка протектора, противоположной первой плечевой зоне относительно экваториальной плоскости шины.
Указанная выше третья точка может находиться по существу на экваториальной плоскости шины.
В предпочтительных вариантах осуществления изобретения, первая, вторая и третья точки находятся на внутренней поверхности шины.
В частности, первая, вторая и третья точки могут быть не совмещены на угол, не превышающий 5°, предпочтительно, не превышающий 3°, более предпочтительно, не превышающий 1°.
Предпочтительно, первая и вторая точки находятся на расстоянии от экваториальной плоскости шины, составляющем от 15% до 30%, более предпочтительно, от 18% до 28% и еще более предпочтительно, от 20% до 25% всей ширины протектора.
Шина может дополнительно включать по меньшей мере вторую группу датчиков, расположенных во втором положении по окружности шины, отнесенном от первого положения по окружности на заданный угол.
В предпочтительном варианте осуществления изобретения шина дополнительно содержит по меньшей мере третью группу датчиков. Первая, вторая и третья группы датчиков отнесены друг от друга по существу на одинаковый угол.
Каждый из датчиков ускорения может включать блок обработки.
Третий объект настоящего изобретения относится к колесу для транспортного средства, включающему обод и шину. Что касается шины, она соответствует указанному выше.
Колесо может также включать дополнительный датчик ускорения, соединенный с ободом.
Четвертый объект настоящего изобретения касается системы контроля (текущего) шины в движении, включающей шину, содержащую по меньшей мере первую группу датчиков и принимающий блок, соединенный по меньшей мере с первой группой датчиков, причем первая группа датчиков включает
первый датчик ускорения, соединенный с первой точкой участка протектора шины, находящейся на меридиональной плоскости шины,
по меньшей мере второй датчик ускорения, соединенный со второй точкой участка протектора шины, находящейся по существу на меридиональной плоскости.
Принимающий блок может содержать приемник и блок обработки.
Что касается шины, включенной в систему, она соответствует указанному выше.
Пятый объект настоящего изобретения относится к способу контроля транспортного средства, заключающемуся в том, что
снабжают по меньшей мере одну шину, установленную на транспортном средстве, по меньшей мере первой группой датчиков, включающей по меньшей мере первый датчик ускорения, соединенный с первой точкой участка протектора шины, и по меньшей мере второй датчик ускорения, соединенный со второй точкой участка протектора, причем обе первая и вторая точки находятся по существу на одной меридиональной плоскости шины,
получают и сохраняют, по меньшей мере временно, по меньшей мере первую кривую ускорения от первого датчика ускорения и по меньшей мере вторую кривую ускорения от второго датчика ускорения,
сравнивают первую и вторую кривые или выведенные по ним параметры,
определяют маневр транспортного средства на основе указанного сравнения.
Способ может также включать следующие операции:
определение на основе указанного сравнения, достигнуто ли критическое состояние в ходе маневра,
если критическое состояние достигнуто, генерирование сигнала, предназначенного для вызова противодействия для управления транспортным средством.
Указанный сигнал может быть предназначен для приведения в действие сигнала предупреждения для водителя транспортного средства.
В другом варианте осуществления изобретения указанный сигнал может быть предназначен для приведения в действие системы автоматического управления транспортным средством.
Краткое описание чертежей
Характеристики и преимущества изобретения раскрыты в нижеследующем описании со ссылками на прилагаемые чертежи, на которых:
фиг.1 изображает схему поперечного сечения шины, имеющей три датчика ускорения, расположенных на внутренней поверхности герметизирующего слоя, согласно изобретению;
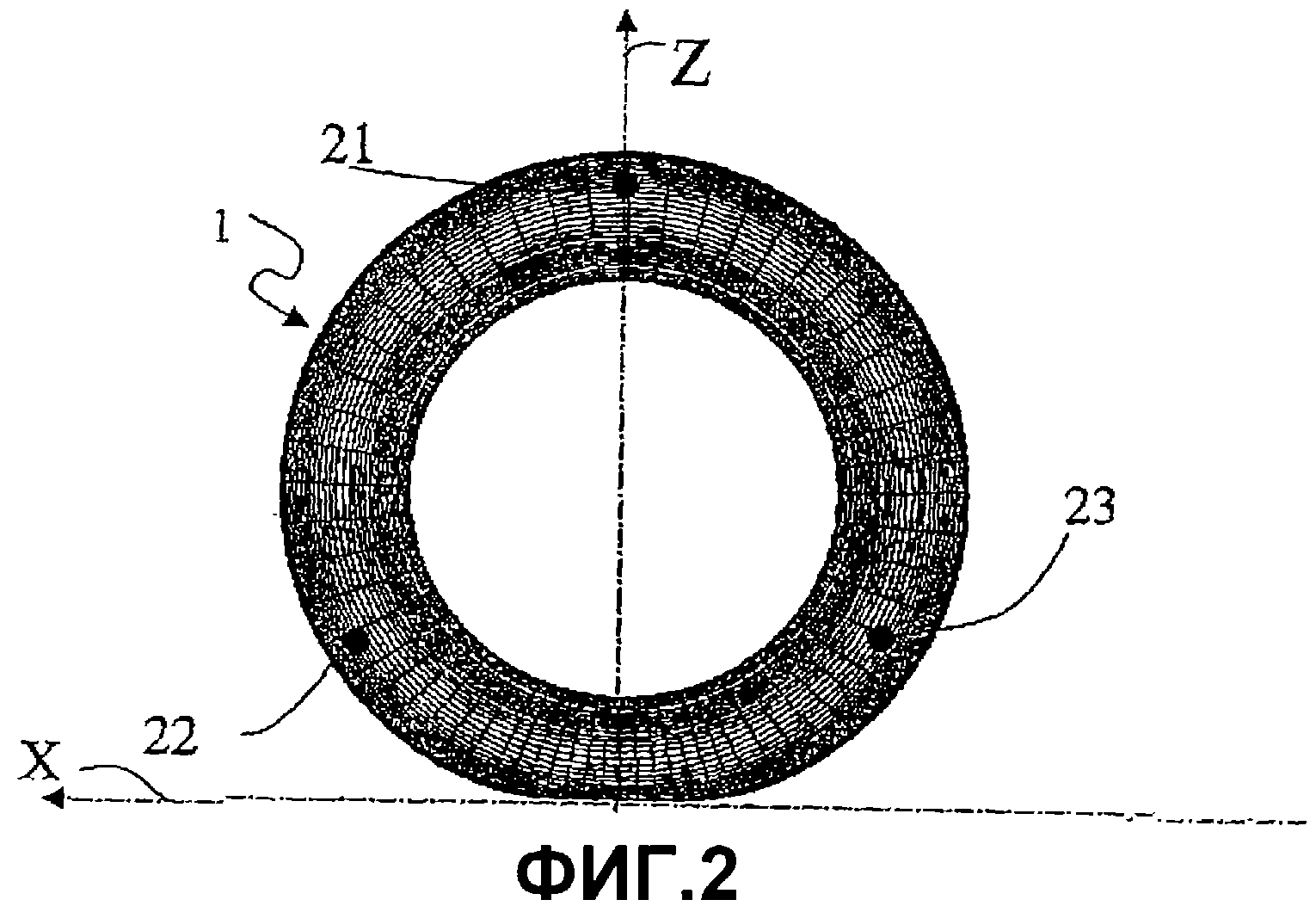
фиг.2 - схему экваториального сечения шины, имеющей три группы датчиков ускорения, расположенных на внутренней поверхности герметизирующего слоя, согласно изобретению;
фиг.3 (a,b,c) - три диаграммы длины пятна контакта относительно количества оборотов поворачивающейся шины, причем длина пятна контакта вычислена на основе измерений тангенциального ускорения шины, согласно изобретению;
фиг.4 - типичную кривую, выведенную на основе измерения тангенциального ускорения, согласно изобретению;
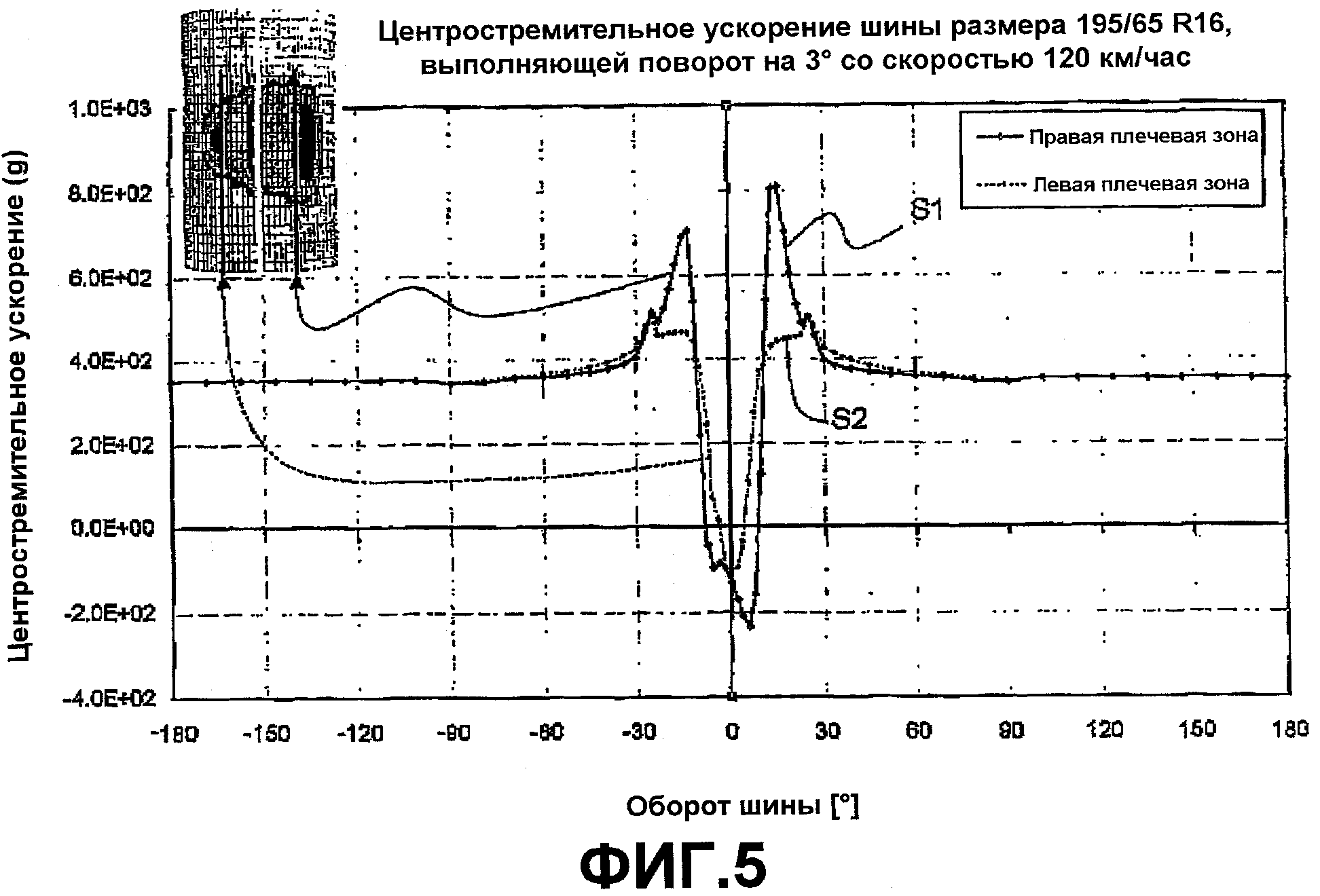
фиг.5 - две диаграммы центростремительного ускорения, измеренного двумя датчиками ускорения, расположенными в плечевых зонах участка протектора шины при выполнении поворота, согласно изобретению.
Описание предпочтительных вариантов осуществления изобретения
На фиг.1 показана шина 1, содержащая полую тороидальную структуру, сформированную из множества элементов и в первую очередь из каркаса, заканчивающегося двумя бортами, каждый из которых сформирован вдоль внутренней кольцевой кромки каркаса для закрепления шины на соответствующем удерживающем ободе. Шина 1 в типичном случае содержит по меньшей мере одну пару кольцевых армирующих сердечников, называемых бортовой проволокой, которые заделаны в указанные борта. Каркас имеет несущую структуру, сформированную по меньшей мере одним армирующим слоем, который содержит текстильные или металлические корды, проходящие в осевом направлении от одного борта к другому в соответствии с тороидальным профилем, и концы которого соединены с соответствующей бортовой проволокой. В радиальных шинах указанные выше корды лежат по существу в плоскостях, включающих ось вращения шины.
На короне каркаса расположена кольцевая структура, известная как брекерный пояс, обычно содержащая одну или более лент прорезиненной ткани, намотанной налагаемыми друг на друга витками. Шина также имеет протектор, выполненный из эластомерного материала, намотанного вокруг брекерного пояса, на котором отпрессован рельефный рисунок для вхождения с дорогой при качении шины. На каркас также помещены две боковины, выполненные из эластомерного материала, которые проходят в радиальном направлении наружу от внешнего края соответствующего борта и расположены на противоположных сторонах в осевом направлении.
В бескамерных шинах внутренняя поверхность каркаса обычно покрыта по меньшей мере одним герметизирующим слоем, то есть одним или более слоев непроницаемого для воздуха эластомерного материала. Шина 1 также может содержать другие известные элементы, такие как закраины, ленты и наполнители, в соответствии с конкретной конструкцией шины.
В настоящем описании термин "эластомерный материал" обозначает материал, полученный посредством сшивания резинового состава, содержащего по меньшей мере эластомерный полимер, имеющий диспергированный в нем наполнитель и обычные добавки, такие как рафинирующие присадки, технологические добавки и т.д. Комбинация всех этих элементов задает механические характеристики по упругости, жесткости и стойкости к деформации шины, которые определяют связь между системой сил, воздействующих на шину, и величиной соответствующих деформаций, которым она подвергается.
Согласно одному аспекту настоящее изобретение относится к измерению в реальном масштабе времени изменений ускорения заданных точек шины в заданном временном интервале. Указанные изменения взаимосвязаны с взаимодействием между движущейся шиной и опорной поверхностью и с деформациями самой шины при ее движении. Для этого по меньшей мере два датчика измерения указанного ускорения расположены по существу вдоль одной меридиональной плоскости внутри шины 1. В данном описании выражение "по существу вдоль одной меридиональной плоскости" предполагает некоторую величину несовпадения положения датчиков ускорения относительно меридиональной плоскости, которое можно выразить как угол между меридиональными плоскостями, в которых расположены датчики ускорения. Предпочтительно, допустимое несовпадение может соответствовать углу, не превышающему 5°, более предпочтительно, не превышающему 3°, и еще более предпочтительно, не превышающему 1°. Более конкретно, датчики находятся на участке Т протектора шины 1, то есть в части шины 1, проходящей в осевом направлении между боковинами шины 1 (фиг.1). Предпочтительно, по меньшей мере три датчика ускорения расположены вдоль по существу одной меридиональной плоскости шины 1.
В варианте осуществления изобретения, показанном на фиг.1, три датчика 11, 12, 13 расположены на внутренней поверхности шины 1 на поверхности внутреннего герметизирующего слоя. Первый датчик 11 расположен по существу вдоль экваториальной плоскости шины 1. Два других датчика 12, 13 расположены по существу на одной меридиональной плоскости шины 1 в плечевых зонах участка протектора, то есть между экваториальной плоскостью и соответствующей боковиной шины 1. Ниже они будут называться датчиком 12 левой плечевой зоны и датчиком 13 правой плечевой зоны. Указанное расположение позволяет контролировать общее поведение всего участка взаимодействия между шиной и дорогой. Например, когда шина осуществляет поворот, сигналы, получаемые от двух датчиков 12 и 13, отличаются друг от друга. Для обеспечения хорошего контроля всего участка взаимодействия между шиной и дорогой датчики ускорения должны быть разнесены друг от друга на определенное расстояние. Однако, что касается датчиков ускорения, расположенных в плечевых зонах участка протектора, они должны располагаться на достаточном удалении от боковин, чтобы выдавать сигналы почти при всех условиях движения. В этом отношении следует отметить, что регулировки транспортного средства, например, такие как установка развала колес в комбинации с определенными маневрами транспортного средства (например, при крутых поворотах), могут вызывать кратковременную потерю взаимодействия между частями протектора, находящимися вблизи боковин, и дорогой. Предпочтительно, датчик ускорения плечевой зоны следует располагать на расстоянии от экваториальной плоскости шины, составляющем от 15% до 30% ширины протектора, более предпочтительно, от 18% до 28% ширины протектора, и еще более предпочтительно, от 20% до 25% ширины протектора. Например, в шине, имеющей ширину протектора, составляющую 195 мм, два датчика плечевой зоны могут быть расположены на противоположных сторонах относительно экваториальной плоскости на расстоянии 45 мм от нее.
Предпочтительно, чтобы по меньшей мере один датчик ускорения измерял ускорение соответствующей контролируемой точки шины 1 относительно по меньшей мере двух перпендикулярных друг другу направлений. Более предпочтительно, чтобы все датчики ускорения измеряли ускорение относительно по меньшей мере двух перпендикулярных друг другу направлений. На фиг.1 локальные оси x, y и z представляют три направления, которые в данном описании названы соответственно:
- центростремительным направлением z, которое является радиальным направлением шины;
- тангенциальным направлением y, которое является касательным направлением к окружности шины;
- поперечным направлением х, которое является направлением, перпендикулярным центростремительному и тангенциальному направлениям.
Предпочтительными направлениями для измерений являются центростремительное и тангенциальное направления.
На фиг.2 показан другой вариант осуществления настоящего изобретения, в котором с шиной 1 соединены несколько групп 21, 22, 23 датчиков ускорения. Каждая группа 21, 22, 23 датчиков ускорения содержит датчики ускорения, расположенные по существу вдоль одной меридиональной плоскости шины 1. Предпочтительно, группы датчиков ускорения расположены по окружности и разнесены друг от друга на одинаковый угол. Например, на фиг.2 показаны три группы датчиков ускорения, разнесенные друг от друга на угол, по существу составляющий 120°. Что касается расположения датчиков ускорения в каждой группе 21, 22 или 23 в варианте на фиг.2, оно соответствует описанному выше.
Использование множества групп датчиков ускорения позволяет достигать большей точности и надежности измерений, осуществляемых датчиками ускорения, а также лучший контроль в ходе всего оборота шины. Например, в ходе оборота шины 1 можно одновременно контролировать ускорение при взаимодействии шины и опорной поверхности при помощи первой группы датчиков, ускорение точки, находящейся перед пятном контакта, при помощи второй группы датчиков и ускорение точки, находящейся после пятна контакта, при помощи третьей группы датчиков.
Датчики 11, 12, 13 и/или 21, 22, 23 ускорения в типичном случае могут быть скомпонованы в соответствующих датчиках, дополнительно включающих источник питания, такой как батарея или самогенерирующее устройство питания (например, пьезоэлектрическое устройство, генерирующее электроэнергию благодаря деформациям, испытываемым шиной при вращении) для питания датчика ускорения, передатчик, соединенный с датчиком ускорения и с источником питания, антенну, соединенную с передатчиком. Кроме того, датчики 11, 12, 13 и/или 21, 22, 23 ускорения соединены с принимающим устройством, включающим антенну, приемник и блок обработки. Предпочтительно, чтобы такое принимающее устройство было расположено на транспортном средстве. Например, указанное принимающее устройство может быть частью бортового компьютера транспортного средства.
Датчики ускорения генерируют сигнал, соответствующий ускорению той точки шины 1, с которой они соединены. Указанные сигналы затем передаются приемнику на радиочастотах. Блок обработки может содержать запрограммированный микропроцессор, имеющий энергозависимое запоминающее устройство, постоянное запоминающее устройство и центральный процессор. Блок обработки принимает сигналы ускорения и осуществляет обработку, необходимую для определения по этим сигналам, какой маневр (например, торможение, ускорение, поворот и т.д.) выполняет шина или транспортное средство. Кроме того, он может выявить достижение шиной или транспортным средством критического состояния в ходе такого маневра (например, вследствие глиссирования). В таком случае может генерироваться сигнал для вызова противодействия для управления транспортным средством, например, водителем или системой автоматического управления транспортным средством.
Операции, необходимые для определения по результатам измерений ускорения, выполняемого шиной маневра, а также для предупреждения достижения критического состояния, включают сравнение сигналов, полученных от двух датчиков ускорения, находящихся по существу в одной меридиональной плоскости шины 1. Как будет показано ниже, измерение, выполненное одним датчиком ускорения, не может дать информацию, достаточную для указанных выше целей.
На фиг.3а, 3b, 3с показаны результаты оценки, выполненной на основе сигналов ускорения, выданных датчиками ускорения, расположенными в шине для варианта, показанного на фиг.1. Три датчика ускорения были расположены в шине Pirelli™ P6® размера 195/65R15. Шина была накачана до давления 2,2 бар, установлена на переднюю правую ось автомобиля и подвергалась воздействию нагрузки, составляющей около 3700 Н. Результат, показанный тремя кривыми (фиг.3а, b, c), относится к пути, пройденному автомобилем со скоростью 80 км/час и состоящему из 150 м прямой дороги, после которой следовал поворот влево с радиусом около 120 м.
На фиг.3а показан результат, полученный на основе сигналов, выданных датчиком 12 ускорения левой плечевой зоны, на фиг.3b показан результат, полученный на основе сигналов, выданных центральным датчиком 11 ускорения, и на фиг.3 с показан результат, полученный на основе сигналов, выданных датчиком 13 ускорения правой плечевой зоны. Кривые на фиг.3а, 3b, 3 с показывают длину пятна контакта, выведенную посредством измерения тангенциального ускорения аТ, относительно количества № оборотов, сделанных шиной на протяжении указанного выше пути. На фиг.4 показана в увеличенном масштабе часть, соответствующая длине пятна контакта типичного сигнала, выданного датчиком ускорения в тангенциальном направлении (ускорение относительно времени). Посредством подсчета количества npi точек измеренной кривой между двумя разрывами, показанными на фиг.4, соответствующих началу и концу прохождения измеряющего датчика ускорения в пятне контакта, и зная частоту измерений, радиус шины и угловую скорость шины, можно подсчитать длину пятна контакта, то есть величину, показанную кривыми на фиг.3а, 3b, 3с. Длину пятна контакта можно также определить посредством измерений центростремительного ускорения, как указано выше в заявках на патент ЕР 887211 и WO 98/56606.
На фиг.3 представлены диаграммы, соответствующие измерениям, выполненным датчиком ускорения, расположенным в шине, например, на фиг.3b по измерениям, выполненным датчиком ускорения, расположенным в экваториальной плоскости шины. Согласно этой кривой, длина пятна контакта остается по существу неизменной, составляя около 125 мм в первой части кривой, и увеличивается до значения, составляющего около 140 мм, во второй части. Начало увеличения длины пятна контакта соответствует началу поворота на пути следования. Однако по одной кривой, показанной на фиг.3b, не может быть получена уникальная информация о том, какой тип маневра (в данном случае поворот) выполняет транспортное средство. Фактически, увеличение длины пятна контакта, показанное на фиг.3b, могло бы соответствовать повышению нагрузки на колесо, несущее шину, например, вследствие торможения или в другом примере уменьшению давления в шине. Таким образом, полная информация, позволяющая правильно определить маневр, не может быть получена по измерению, выполняемому одним датчиком.
И наоборот, при сравнении трех кривых, показанных на фиг.3, можно выявить поворот транспортного средства. Фактически, в первых частях кривых на фиг.3а, 3b, 3с, соответствующих прямой части пройденного пути, длина пятна контакта, выведенная по измерениям, выполненным датчиком ускорения правой плечевой зоны, меньше длины пятна контакта, выведенной по измерениям, выполненным другими датчиками ускорения, вследствие регулировки угла развала колес транспортного средства. В начале поворота пройденного пути в центральной части кривых 3а, 3b, 3с можно наблюдать разные изменения длины пятна контакта, в частности сильное увеличение длины пятна контакта, измеренной датчиком ускорения правой плечевой зоны, вследствие боковой нагрузки, воздействию которой подвергается транспортное средство при прохождении поворота. Разности результатов измерения, выполненного тремя датчиками ускорения, расположенными согласно варианту, показанному на фиг.1, позволяют выявить поворот транспортного средства посредством сравнения сигналов или параметров, выведенных на основе сигналов (например, длины пятна контакта). Кроме того, посредством сравнения можно определить, достигнуто ли критическое состояние, соответствующее ненормальным разностям между обнаруженными сигналами или параметрами в ходе выявленного маневра.
На основе сигналов, полученных от разных датчиков ускорения, включенных в шину, согласно изобретению, можно осуществить сравнения многих типов. Примеры сравнений кривых ускорения относительно времени, полученных при помощи разных датчиков, включают
полное сравнение двух кривых по точкам для всего оборота шины,
сравнение некоторых характеристических пиков первой кривой с соответствующими характеристическими пиками второй кривой в отношении амплитуд пиков,
сравнение всей площади под первой кривой (или под ее частью) с соответствующей всей площадью под второй кривой (или под соответствующей ее частью),
сравнение ширины части первой кривой с шириной соответствующей части второй кривой.
Информацию, полученную посредством указанных сравнений, можно использовать для задания регулировок механизмов автомобиля, например для регулирования тормозной системы (поведения в продольном направлении и/или в поперечном направлении) или активной подвески и т.д.
В предпочтительном варианте осуществления изобретения, в каждом датчике может быть расположен блок обработки, соединенный с соответствующим датчиком ускорения, чтобы можно было посылать в принимающее устройство, расположенное на транспортном средстве, предварительно обработанные сигналы. В этом случае блок обработки принимающего устройства накапливает предварительно обработанные сигналы, поступающие от всех датчиков ускорения, и осуществляет необходимое сравнение разных предварительно обработанных сигналов. Предварительно обработанные сигналы могут содержать параметры, выведенные на основе кривых ускорения, таких как амплитуды пиков или расстояния между пиками.
В предпочтительных вариантах осуществления изобретения датчики 11, 12, 13 и/или 21, 22, 23 ускорения расположены на внутренней поверхности шины в контакте с герметизирующим слоем шины. Такое расположение предпочтительно, поскольку может быть достигнут точный контроль положения датчиков наряду с простотой процесса установки. Датчики 11, 12, 13 и/или 21, 22, 23 могут быть соединены с внутренней поверхностью герметизирующего слоя при помощи клея или механических средств. В альтернативном варианте один или более указанных датчиков ускорения могут быть заделаны в герметизирующий слой, или в слой протекторного браслета, или в каркас, или в брекерный пояс шины при изготовлении шины.
В другом варианте осуществления изобретения (не показан), в датчик ускорения может быть включен по меньшей мере один дополнительный датчик ускорения, расположенный на ободе колеса. В этом случае сравнение между ускорением, измеренным датчиком на ободе, и ускорение, измеренное датчиком, расположенным на участке протектора, может отобразить относительное перемещение между ободом и шиной, например, при торможении.
Количество и расположение датчиков ускорения, находящихся в шине, зависит от поставленных технических условий. В целом, большее количество датчиков обеспечивает лучший текущий контроль. Однако следует принимать во внимание компромисс между стоимостью, добавочным весом, требованиями по обработке/объему информации и т.д.
Например, на фиг.5 показаны кривые ускорения, измеренные в центростремительном направлении двумя датчиками ускорения, расположенными в правой и левой плечевых зонах участка протектора шины Pirelli™ P7® размера 205/55/R16, накачанной до давления 2,2 бар и испытывающей нагрузку, составляющую 4500 Н. Это соответствует варианту выполнения шины, показанному на фиг.1, из которого убрали центральный датчик 11 ускорения. Первая кривая, обозначенная индексом S1 на фиг.5, относится к датчику 13 правой плечевой зоны на фиг.1; вторая кривая, обозначенная индексом S2 на фиг.5, относится к датчику 12 левой плечевой зоны на фиг.1. Шина находилась в состоянии поворота налево на 3° со скоростью 120 км/час.
Как можно видеть, датчик в правой плечевой зоне (кривая S1) в районе, который включает пятно контакта шины (включающий пики, видимые на фиг.5), измеряет ускорение, которое превышает ускорение, измеренное датчиком левой плечевой зоны (кривая S2). Это происходит вследствие деформации шины при выполнении поворота. Благодаря текущему контролю разности ускорений, измеренных указанными двумя датчиками, система, согласно изобретению, способна выявлять критическое состояние при выполнении поворота. Например, критическое состояние может быть выявлено посредством сравнения разности ускорений с заданным пороговым значением или посредством сравнения (по точкам) кривых, отслеженных датчиками плечевых зон, с опорными кривыми, сохраненными в запоминающих устройствах. Заданные опорные кривые ускорения или заданные пороговые значения параметров, выводимых на основе кривых ускорения, могут храниться в энергозависимом запоминающем устройстве или в постоянном запоминающем устройстве блока обработки временно или постоянно. Опорные кривые или пороговые параметры можно вводить в память при настройке системы, и их может генерировать каждый из датчиков ускорения системы.
Посредством сравнения сигналов, полученных от датчиков, соединенных с разными шинами транспортного средства, может быть получена другая информация. Например, для полного контроля торможения транспортного средства можно выполнять сравнение сигналов, полученных от датчиков передних шин, и сигналов, полученных от датчиков задних шин транспортного средства. Другой пример сравнения сигналов, полученных от датчиков, расположенных в разных шинах транспортного средства, может осуществляться при выполнении поворота, когда разность сигналов, полученных от шины на одной стороне транспортного средства, можно сравнивать с сигналами, полученными от шины на другой стороне транспортного средства.
Разные кривые ускорения получают при движении автомобиля по дороге, предпочтительно, в ходе каждого оборота шины. Кривые (или значения параметров, выведенных на основе характеристических частей кривых, например такие как значения пиков) могут храниться временно для сравнения их друг с другом. Кроме того, кривые или параметры, полученные или выведенные при обороте шины, можно сравнивать с кривыми или параметрами, полученными или выведенными при предшествующих оборотах шины или при вхождении в контакт с дорогой предшествующих участков шины (фиг.2). Таким образом можно осуществлять полный текущий контроль поведения транспортного средства. Кроме того, можно также выявлять основные изменения в течение срока службы шины (например, вследствие износа или структурных изменений в шине) посредством сравнения разных кривых или параметров, генерированных на основе сигналов датчика в разные периоды времени (например, ежемесячно).
Предпочтительно, ускорения контролируемых точек можно интегрировать с другой информацией о транспортном средстве, например о скорости транспортного средства и/или давлении в шине.
Реферат
Способ контроля шины при движении содержит следующие операции: получают и сохраняют, по меньшей мере временно, первую кривую, представляющую собой профиль ускорения первой точки участка протектора шины, находящейся на меридиональной плоскости шины; получают и сохраняют, по меньшей мере временно, по меньшей мере вторую кривую, представляющую собой профиль ускорения второй точки участка протектора шины, находящейся по существу на меридиональной плоскости; сравнивают первую и вторую кривые или выведенные по ним параметры; определяют поведение шины на основе указанного сравнения. В результате повышается оперативность информации от катящейся шины для использования ее при совершении автомобилем маневра, например поворота или торможения. 5 н. и 32 з.п. ф-лы, 5 ил.

Комментарии