Способ диагностики состояния накачки шины транспортного средства - RU2760044C2
Код документа: RU2760044C2
Описание
Изобретение относится к способу диагностики состояния накачки шины транспортного средства. Предпочтительно, но не исключительно, такой способ можно применять для автотранспортного средства.
Это изобретение касается отслеживания понижения давления по меньшей мере в одной из шин автотранспортного средства при помощи непрямого метода.
В целом система мониторинга давления в шинах (SSPP) предназначена для мгновенного оповещения водителя в случае падения давления в шинах, чтобы он мог незамедлительно произвести подкачку приспущенной шины или ее замену. Такая мера позволяет:
- уменьшить выбросы СО2, причиной которых могло бы стать приспущенное состояние,
- увеличить срок службы шин, и
- повысить безопасность пассажиров за счет устранения риска разрыва шин.
Современные решения SSPP или прямые методы основаны на использовании датчиков давления, устанавливаемых на каждом вентиле колес транспортного средства, с измерением в реальном времени значений давления и температуры. Недостатками этих решений является то, что:
- шины должны быть адаптированы для установки таких датчиков,
- датчики давления требуют регулярного обслуживания, чтобы минимизировать риски возникновения неисправности при отслеживании давления,
- использование датчиков давления приводит к увеличению производственных расходов и расходов на обслуживание.
Новые решения без датчика давления (непрямая система SSPP) предусматривают систему обнаружения понижения давления на основании анализа сигналов на CAN-шине (угол поворота рулевого колеса, угловые скорости, режим двигателя и ускорения). Однако эти новые решения или непрямые методы являются более сложными, чем существующие решения, и их внедрение связано с трудностями. Непрямая система SSPP представляет собой алгоритмы отслеживания понижения давления, которые связаны с большим числом регулировочных параметров. Чтобы оптимизировать все эти параметры и подтвердить полученную конечную регулировку, была разработана большая база данных на основании большого числа испытаний, соответствующих фазам езды. Следовательно, учитывая время моделирования системы на всей этой базе данных, ручное применение алгоритмов отслеживания системы SSPP является сложной, трудоемкой и длительной задачей.
Непрямые системы SSPP, основанные на угловых скоростях колес, включают в себя, кроме всего прочего, два типа алгоритмов отслеживания.
Первый алгоритм отслеживания основан на сравнительном анализе динамических радиусов колес при помощи сигналов угловых скоростей. Действительно, прямым следствием уменьшения динамического радиуса является увеличение угловой скорости колеса. Этот алгоритм, называемый системой обнаружения прокола (SDC), позволяет эффективно обнаруживать любое понижение давления в колесе.
Второй алгоритм основан на спектральном анализе сигналов угловых скоростей. Было установлено, что понижение давления приводит к снижению характеристических частот вибраций транспортного средства и колеса, проявляющемуся в сигнале угловой скорости. Этот алгоритм позволяет обнаруживать понижение давления в нескольких колесах и представляет особый интерес при обнаружении слабых падений давления, накапливающихся после длительного периода езды. Эта система называется системой обнаружения диффузии (SDD).
В заявке FR2927019 описан способ диагностики накаченного состояния по меньшей мере одной шины автотранспортного средства. Речь идет о диагностике, производимой по меньшей мере на одной шине пар передних и задних колес автотранспортного средства, причем каждая из этих пар связана с одной осью транспортного средства, при этом диагностика включает в себя измерение угловых скоростей колес транспортного средства и анализ измеренных скоростей для отслеживания указанного накаченного состояния. Недостатком этого способа является то, что он не позволяет обнаруживать приспущенное состояние нескольких шин транспортного средства и отслеживать разные уровни приспущенного состояния указанных шин.
Заявленный способ диагностики накаченного состояния по меньшей мере одной шины транспортного средства позволяет преодолеть недостатки известных технических решений.
Объектом изобретения является способ диагностики накаченного состояния каждой шины транспортного средства, содержащего переднюю пару из правой и левой шин и заднюю пару из правой и левой шин.
Главным отличительным признаком заявленного способа является то, что он содержит следующие этапы:
- первый этап определения фактического радиуса RFL,RFR, RRL и RRR каждого из четырех колес путем определения первого критерия CR1, сравнивающего угловые скорости диагональных пар колес, второго критерия CR2, сравнивающего угловые скорости пар передних и задних колес, и третьего критерия CR3, сравнивающего угловые скорости пар правых и левых колес, и при помощи произвольного уравнения, связывающего четыре фактических радиуса RFL,RFR, RRL и RRR между собой, при этом RFL,RFR, RRL и RRR являются соответственно радиусом левого переднего колеса, радиусом правого переднего колеса, радиусом левого заднего колеса и радиусом правого заднего колеса,
- второй этап определения относительного радиуса каждого из четырех колес путем вычисления отношения каждого из фактических радиусов, определенных на предыдущем этапе, к максимальному фактическому радиусу, определенному во время указанного предыдущего этапа,
- этап диагностики накаченного состояния каждого из колес на основании значений относительных радиусов, определенных на предыдущем этапе.
Такой способ основан на сравнительном анализе динамических радиусов колес при помощи сигналов угловых скоростей. Такой способ является полным, так как позволяет диагностировать приспущенное состояние каждого из колес транспортного средства и облегчает локализацию шины или шин с пониженным давлением. Максимальный фактический радиус соответствует максимальному значению фактического радиуса, определенного для четырех колес.
Предпочтительно произвольное уравнение, позволяющее реализовать первый этап определения, имеет следующий вид:

Предпочтительно на этапе диагностики сравнивают относительный радиус каждого из колес с пороговым значением, которое можно калибровать следующим образом:
Порог>min(RrFL, RrFR, RrRL, RrRR), где RrFL, RrFR,RrRLи RrRR являются соответственно относительными радиусами левого переднего колеса, правого переднего колеса, левого заднего колеса и правого заднего колеса.
Предпочтительно этап диагностики осуществляют, присваивая значение 1 относительному радиусу наиболее накаченного колеса и выражая значение относительного радиуса других колес в процентах радиуса указанного наиболее накаченного колеса, затем сравнивая разность между относительным радиусом каждого колеса и значением 1 и, наконец, сравнивая каждую измеренную разность с заранее определенным пороговым значением.
Предпочтительно пороговые значения вырабатывают на основании базы данных, отображающей условия и результаты большого числа реальных тестов, при этом указанные условия представлены по меньшей мере одним параметром, выбираемым среди массы транспортного средства, числа приспущенных колес, давления шин, типа дороги, по которой движется транспортное средство, и метеорологии.
Предпочтительно указанные три критерия определяют при помощи следующих уравнений:

где

соответственно являются угловой скоростью левого переднего колеса, правого переднего колеса, левого заднего колеса и правого заднего колеса, и Vтранспортного средства является скоростью транспортного средства.
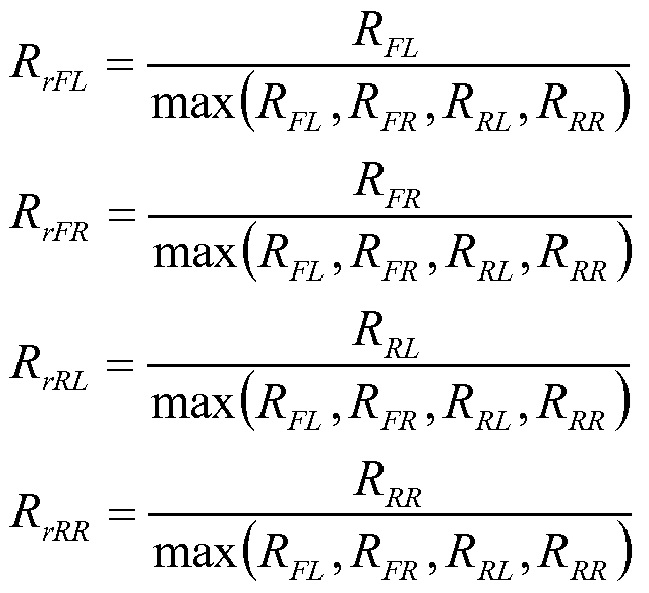
Предпочтительно второй этап определения относительного радиуса каждого колеса осуществляют при помощи следующих уравнений:

Предпочтительно заявленный способ дополнен этапом контроля, на котором при помощи датчика измеряют давление каждой шины, затем сравнивают накаченное состояние каждой шины, полученное при помощи указанного датчика, и накаченное состояние, полученное на основании относительных радиусов указанных шин.
Далее следует подробное описание предпочтительного варианта осуществления заявленного способа диагностики.
Можно напомнить, что в заявке FR2927019А1 диагностику осуществляют путем анализа значений

Например, в контексте единственного приспущенного состояния:



В контексте одновременного приспущенного состояния на диагонали:
В контексте одновременного приспущенного состояния трех шин:
Проблемой этого метода является то, что он не позволяет эффективно анализировать многочисленные ситуации понижения давления с разными уровнями понижения давления в шинах (например, одна шина приспущена на 30%, другая - на 20% и третья - на 10%).
Настоящее изобретение состоит в оценке относительного радиуса каждого из колес на основании трех критериев
Критерий CR1 позволяет сравнить угловые скорости диагональных пар колес:
Критерий CR2 позволяет сравнить угловые скорости пар передних-задних колес:
Критерий CR3 позволяет сравнить угловые скорости пар правых-левых колес:

Зная, что для каждого колеса угловую скорость вычисляют на основании скорости транспортного средства и радиуса рассматриваемого колеса:
предыдущие уравнения можно записать следующим образом:
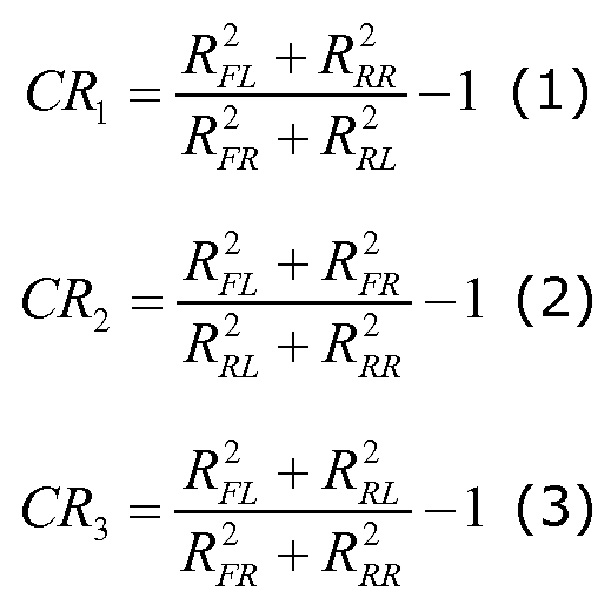
Для вычисления радиусов RFL,RFR, RRL и RRR на основании критериев CR1, CR2 и CR3 не хватает одного уравнения. Следовательно, предлагается добавить уравнение:

При этом систему из 4 уравнений (1), (2), (3) и (4) и с четырьмя неизвестными RFL,RFR, RRL и RRR решают, например, при помощи символической панели инструментов из пакета MatLab:
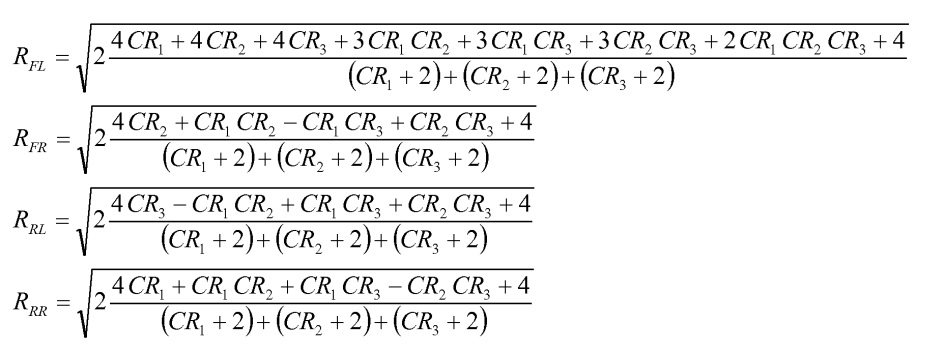
Таким образом, определяют относительный радиус каждого из колес:
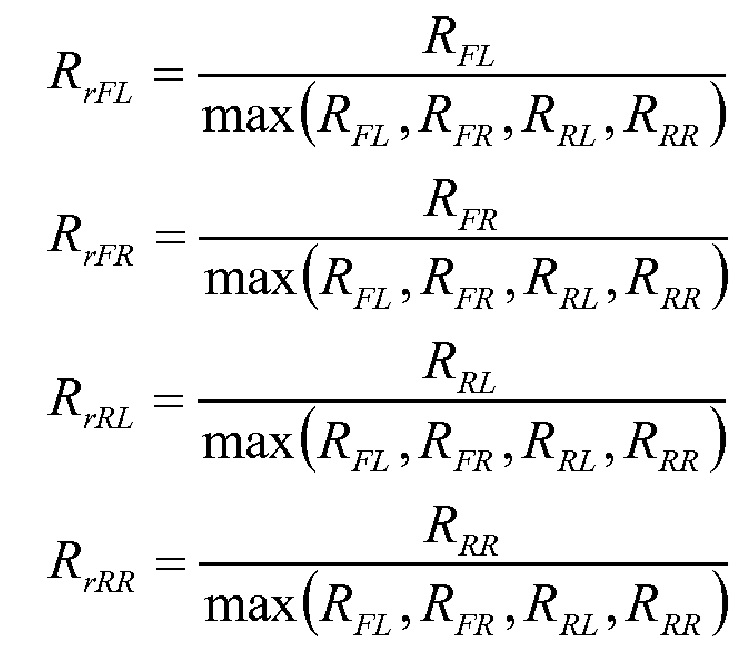
Все относительные радиусы меньше или равны 1. Радиус наиболее накаченной шины будет обязательно равен 1.
Метод диагностики ситуации понижения давления состоит в сравнении относительного радиуса каждого из колес с порогом, который можно калибровать.
Порог>min(RrFL, RrFR, RrRL, RrRR)
В контексте отслеживания (но не локализации), если минимальное значение относительных радиусов меньше значения порога, система выдает тревожный сигнал падения давления. Вместе с тем, эту стратегию можно использовать в комбинации с прямой системой SSPP (с датчиками давления), чтобы повысить точность локализации проблемы понижения давления.
Определение порогов осуществляют, используя базу данных, созданную на основании большого числа реальных тестов, которые были проведены в разных условиях и с разными параметрами (масса транспортного средства, число приспущенных колес, давление шин, тип дороги…).
Реферат
Способ содержит следующие этапы: первый этап определения, на котором определяют фактический радиус RFL,RFR, RRLи RRRпосредством сравнения угловых скоростей колес и при помощи произвольного уравнения, связывающего четыре фактических радиуса RFL,RFR, RRLи RRRмежду собой, при этом RFL,RFR, RRLи RRRявляются соответственно радиусом левого переднего колеса, радиусом правого переднего колеса, радиусом левого заднего колеса и радиусом правого заднего колеса; второй этап определения, на котором определяют относительный радиус каждого из четырех колес на основании фактических радиусов, определенных на предыдущем этапе, и на основании максимального фактического радиуса, определенного на указанном предыдущем этапе; этап диагностики состояния накачки каждого из колес на основании значений относительных радиусов, определенных на предыдущем этапе. Технический результат - возможность обнаруживать приспущенное состояние нескольких шин транспортного средства и отслеживать разные уровни приспущенного состояния указанных шин. 7 з.п. ф-лы, 3 табл.
Формула



Комментарии