Устройство контроля давления воздуха в шинах - RU2550107C1
Код документа: RU2550107C1
Чертежи




Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству контроля давления воздуха в шинах.
Уровень техники
[0002] В устройстве контроля давления воздуха в шинах или пневматического давления, описанном в патентном документе 1, передатчик отправляет беспроводной сигнал в постоянном, заданном угловом положении. Когда беспроводные сигналы принимаются на стороне транспортного средства, угловые положения соответствующих колес обнаруживаются. Положение колеса, ассоциированное с передатчиком, соответствующим угловому положению, которое имеет наилучшую синхронизацию с периодом вывода беспроводного сигнала из угловых положений колес, определяется как положение колеса (положение колеса), с которым этот передатчик ассоциирован.
Документы предшествующего уровня техники
Патентный документ
[0003] Патентный документ 1: Публикация японской патентной заявки № 2010-122023
Сущность изобретения
Задача, которая должна быть решена изобретением
[0004] Согласно предшествующему уровню техники, описанному выше, угловое положение передатчика определяется из выходного значения датчика ускорения, и беспроводной сигнал выводится в момент времени, когда выходное значение датчика ускорения принимает заданное значение. В этот момент, когда управление торможением, такое как ABS-управление, выполняется, поскольку колесо под управлением подвергается продольному колебанию с очень коротким периодом, что нарушает обнаруженное значение датчика ускорения, передатчик, вероятно, будет определять угловое положение ошибочно и выводить беспроводной сигнал в угловом положении, отличном от заданного углового положения. Следовательно, по причине определения положения колеса передатчика на основе ошибочных данных по угловому положению, определение положения колеса вероятно должно быть отложено.
Задачей или целью настоящего изобретения является предоставление устройства контроля давления воздуха в шинах или пневматического давления, которое может пресекать задержку в определении положения колеса.
Механизм достижения цели
[0005] Для того, чтобы достигать цели, описанной выше, согласно настоящему изобретению, когда выполняется управление торможением, чтобы управлять давлением рабочего тормозного цилиндра колес, обнаружение каждого колеса будет запрещено.
Эффект от изобретения
[0006] Следовательно, согласно настоящему изобретению, когда присутствует вероятность, при которой беспроводной сигнал был передан от передатчика в угловом положении, отличном от заданного углового положения, угловое положение, ассоциированное с каждым колесом, соответствующим этому беспроводному сигналу, не будет обнаруживаться. Следовательно, предотвращается использование ошибочных данных углового положения для определения положения колеса, так что задержка в определении положения колеса может быть подавлена.
Краткое описание чертежей
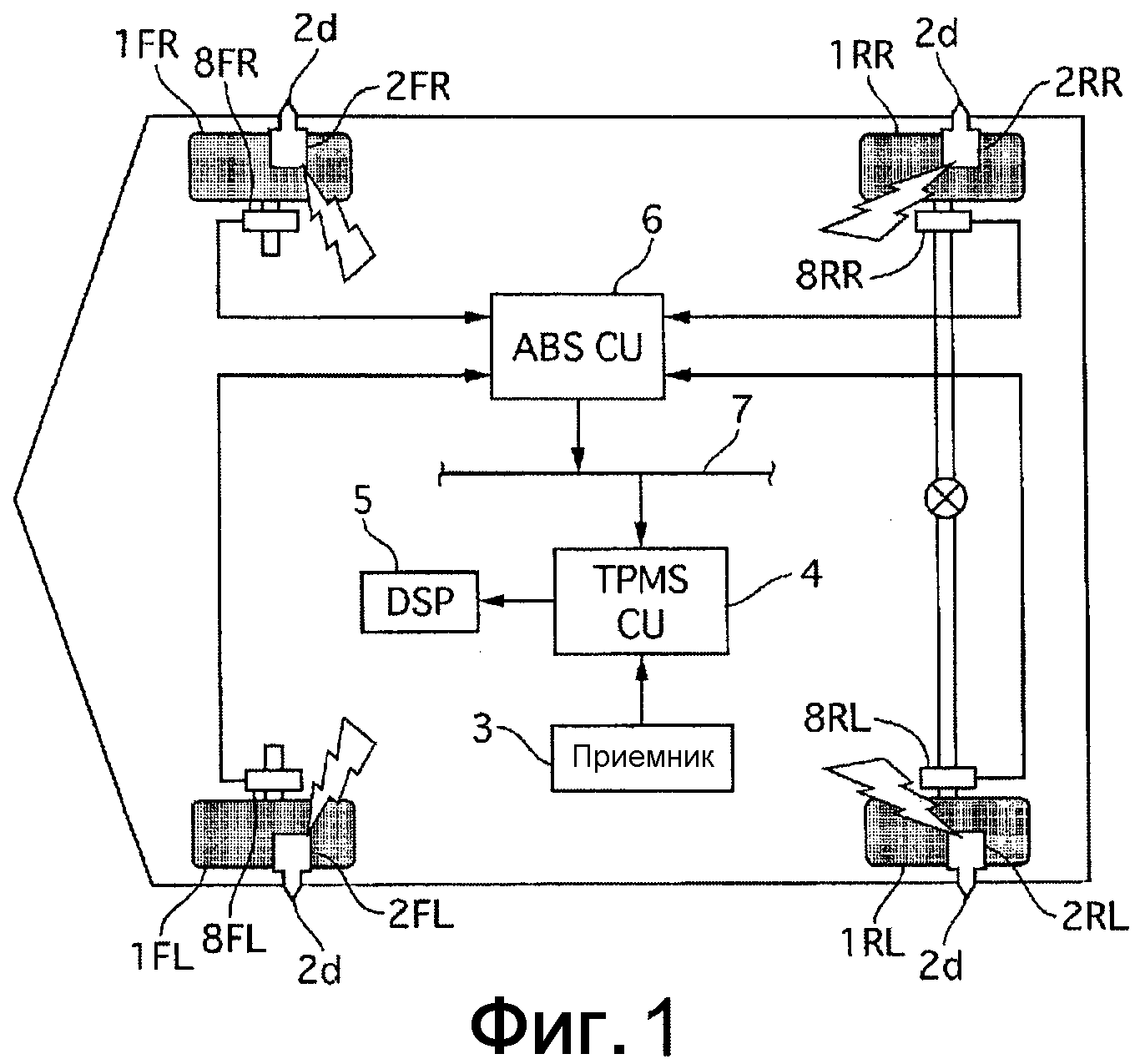
[0007] Фиг. 1 - это конфигурационная схема, иллюстрирующая конфигурацию устройства контроля давления воздуха в шинах в первом варианте осуществления;
Фиг. 2 - это схема конфигурации TPMS-датчика 2;
Фиг. 3 - это блок-схема управления, иллюстрирующая блок-схему управления TPMSCU 4 для выполнения управления определением положения колеса;
Фиг. 4 - это схема, иллюстрирующая способ вычисления углового положения каждого колеса 1;
Фиг. 5 - это схема, иллюстрирующая способ вычисления значения дисперсионной характеристики;
Фиг. 6 - это блок-схема последовательности операций, иллюстрирующая процесс управления определением положения колеса в первом варианте осуществления;
Фиг. 7 - это схема, иллюстрирующая соотношение между угловыми положениями (числом зубцов ротора) каждого из колес 1FL, 1FR, 1RL, 1RR, когда угловое положение TPMS-датчика 2FL левого переднего колеса 1FL принимает наивысшую точку, и числом приема TPMS-данных; и
Фиг. 8 - это схема, иллюстрирующая изменение значения X дисперсионной характеристики в зависимости от числа случаев приема TPMS-данных.
Описание ссылок с номерами
[0008] 1 - колесо
2a - датчик давления (механизм обнаружения давления воздуха в шине)
2b - G-датчик (датчик ускорения)
2d - передатчик
3 - приемник
4a - блок вычисления углового положения (механизм вычисления углового положения)
4c - блок определения положения колеса (механизм определения положения колеса)
4e - блок запрещения обнаружения углового положения (механизм запрещения обнаружения).
Варианты осуществления для реализации изобретения
В последующем варианты осуществления настоящего изобретения будут описаны со ссылкой на варианты осуществления на основе чертежей.
[Первый вариант осуществления]
Фиг. 1 - это конфигурационная схема, иллюстрирующая устройство контроля давления воздуха в шинах или пневматического давления в первом варианте осуществления. На этом чертеже конечные символы, присоединенные к каждому ссылочному знаку, предназначены, чтобы указывать следующее: FL означает левое переднее колесо, FR означает правое переднее колесо, RL означает левое заднее колесо и RR означает правое заднее колесо, соответственно. В последующем описании, когда специально не требуется, описание FL, FR, RL и RR будет опущено.
Устройство контроля давления воздуха в шинах в первом варианте осуществления снабжено TPMS-датчиками 2 (TPMS - система контроля давления в шине), приемником 3, блоком управления TPMS (TPMSCU) 4, устройством 5 отображения и датчиками 8 скорости (вращения) колес. TPMS-датчик 2 устанавливается на каждом из колес 1, а приемник 3, TPMSCU 4, устройство 5 отображения и датчики 8 скорости колес размещаются на стороне кузова транспортного средства.
[0010] TPMS-датчик 2 устанавливается в положении воздушного клапана (не показан на чертеже) каждого колеса. Фиг. 2 - это схема, иллюстрирующая конфигурацию TPMS-датчика 2. TPMS-датчик 2 содержит датчик давления (механизм определения давления воздуха в шине) 2a, датчик ускорения (G-датчик) 2b, блок управления датчиком (CU датчика) 2c, передатчик 2d и батарею 2e таблеточного типа.
Здесь датчик 2a давления обнаруживает давление воздуха шины [кПа].
G-датчик 2b обнаруживает ускорение в центробежном направлении [G], действующее на шину.
CU 2c датчика работает за счет мощности, подаваемой от батареи 2e таблеточного типа, и TPMS-данные, содержащие информацию о давлении воздуха в шине, обнаруженном датчиком 2a давления, и ID датчика (идентификационную информацию), отправляются в качестве беспроводного сигнала из передатчика 2d. В первом варианте осуществления ID датчиков определены цифрами от 1 до 4.
[0011] CU 2c датчика сравнивает ускорение в центробежном направлении, обнаруженное G-датчиком 2b, с предварительно установленным пороговым значением для определения состояния движения транспортного средства. Когда ускорение в центробежном направлении меньше, чем пороговое значение определения движения, выполняется определение, что транспортное средство остановлено или неподвижно, так что передача TPMS-данных прекращается. С другой стороны, когда ускорение в центробежном направлении превышает пороговое значение определения движения, выполняется определение, что транспортное средство движется, и TPMS-данные будут передаваться в заданный момент времени.
Приемник 3 принимает беспроводные сигналы, выводимые из каждого TPMS-датчика 2, чтобы декодировать и выводить их в TPMSCU 4.
[0012] TPMSCU 4 считывает соответствующие TPMS-данные на основе ID датчика в TPMS-данных и со ссылкой на соотношение соответствия между каждым из ID датчиков и положениями колес, сохраненное в энергонезависимой памяти 4d (см. фиг. 3), TPMSCU 4 определяет, какому положению колеса TPMS-данные соответствуют, и указывает на устройстве 5 отображения давление воздуха в шине, содержащееся в TPMS-данных в качестве пневматического давления соответствующего положения колеса. Когда давление воздуха в шине становится ниже нижнего предельного порога, снижение в давлении воздуха сообщается посредством изменения цвета устройства отображения, миганием на устройстве отображения, предупреждающим сигналом или т.п.
[0013] На основе цепочки импульсов скорости колеса от каждого из датчиков 8 скорости колес ABSCU 6 обнаруживает скорость колеса для каждого колеса 1, соответственно. Когда какое-нибудь колесо имеет тенденцию к блокировке, ABS-актуатор, не показанный на чертеже, задействуется, чтобы регулировать или поддерживать давление в рабочем тормозном цилиндре соответствующего колеса, чтобы пресекать тенденцию к блокировке. Таким образом, выполняется антиблокировочное управление торможением (ABS). ABSCU 6 выводит значение счетчика импульсов скорости колеса в CAN-линию 7 связи в каждый заданный период времени (например, 20 мс).
Каждый датчик 8 скорости колеса сформирован в виде генератора импульсов, который генерирует цепочку импульсов скорости колеса, создавая заданное число z (например, z=48) для каждого цикла вращения колеса 1. Датчик скорости колеса содержит ротор в форме зубчатого колеса, вращающийся синхронно с колесом 1, и как постоянный магнит, так и катушку, размещенные на стороне кузова транспортного средства, и обращенные к внешней окружности ротора. Когда ротор вращается, вогнуто-выпуклая или волнистая поверхность ротора пересекает магнитное поле, сформированное на внешней границе датчика 8 скорости колеса, так что плотность магнитного потока изменяется, что формирует электродвижущую силу в катушке, и такое изменение в напряжении выводится в качестве импульсного сигнала скорости колеса в ABSCU 6.
[0014] В дополнение к ABS-управлению ABSCU 6 выполняет управление стабилизацией поведения транспортного средства, антипробуксовочное управление с использованием тормоза и LSD-управление с использованием тормоза в качестве управления, чтобы управлять давлением рабочего тормозного цилиндра колеса 1. Более конкретно, посредством управления стабилизацией поведения транспортного средства колесу передается тормозное усилие, чтобы пресекать тенденцию к избыточному рулевому управлению или тенденцию к недостаточному рулевому управлению транспортного средства, чтобы обеспечивать стабильность движения транспортного средства. Посредством антипробуксовочного управления с использованием тормоза сила сцепления шины с дорогой будет увеличиваться, пресекая холостое вращение или пробуксовку ведущего колеса, когда одна сторона ведущих колес проскальзывает, например, на дороге с низким µ (коэффициентом трения) и т.п. В LSD-управлении с использованием тормоза дифференциал ограничивается с помощью тормоза. ABSCU 6 выводит сигнал управляющего флага в CAN-линию 7 связи и указывает, выполняется или нет управление торможением, описанное выше. Управляющий флаг устанавливается в "0", когда управление торможением не происходит или не выполняется, тогда как устанавливается в "1", когда выполняется.
[0015] Как описано выше, на основе соотношения соответствия между ID датчика и положением колеса, сохраненного в памяти 4d, TPMSCU 4 определяет, к какому колесу принятые TPMS-данные принадлежат. Следовательно, когда выполняется перестановка шин, в то время как транспортное средство стоит, соотношение соответствия между ID датчика и положением колеса, сохраненное в памяти 4d, не согласуется с фактическим соотношением соответствия, и невозможно определять, к какому колесу принадлежат TPMS-данные. Здесь "перестановка шин" ссылается на операцию перестановки местами положений установки шин на колеса с тем, чтобы обеспечивать равномерный износ протектора шин и, таким образом, продлевать срок эксплуатации (срок службы протектора). Например, для пассажирского транспортного средства обычно шины передних/задних колес меняются местами, как и шины левых/правых колес.
Здесь согласно первому варианту осуществления для того, чтобы обновлять и сохранять в памяти 4d соотношение соответствия между ID каждого датчика и положением каждого колеса после перестановки шин, когда существует вероятность того, что перестановка шин была выполнена, период передачи TPMS-данных на стороне каждого TPMS-датчика 2 будет изменен, а на стороне TPMSCU4, на основе периода передачи TPMS-данных и импульса скорости каждого колеса, делается определение, с каким колесом связан каждый TPMS-датчик 2.
[0016] [Режим передачи в постоянной позиции]
Когда время определения остановки транспортного средства непосредственно перед началом движения транспортного средства составляет или больше, чем заданное время (например, 15 мин), CU 2c датчика для TPMS-датчика 2 определяет, что могла быть выполнена перестановка шин.
Когда время определения остановки транспортного средства непосредственно перед началом движения транспортного средства меньше заданного времени, CU 2c датчика выполняет "обычный режим", в котором TPMS-данные передаются в каждом постоянном или заданном интервале (например, с интервалом в одну минуту). С другой стороны, когда время определения остановки транспортного средства составляет или больше заданного времени, CU датчика выполняет "режим передачи в постоянной позиции", в котором в интервале, более коротком, чем интервал передачи в обычном режиме (например, с интервалом около 16 секунд), TPMS-данные передаются в постоянном или заданном угловом положении.
[0017] Режим передачи в постоянной позиции выполняется до тех пор, пока число передач TPMS-данных не достигнет заданного числа раз (например, 40 циклов). Когда число случаев передачи достигает заданного числа раз, режим передачи в постоянной позиции переходит в обычный режим. Когда выполнено определение о том, что транспортное средство стоит, прежде чем число случаев передачи TPMS-данных достигает заданного числа раз, если время определения остановки транспортного средства короче, чем заданное время (15 мин), режим передачи в постоянной позиции перед остановкой транспортного средства продолжается до тех пор, пока число случаев передачи не достигнет заданного числа раз. Когда время определения остановки транспортного средства дольше, чем заданное время, продолжение режима передачи в постоянной позиции перед остановкой транспортного средства отменяется, и новый режим передачи в постоянной позиции начинается.
[0018] В режиме передачи в постоянной позиции, на основе зависимой от гравитационного ускорения компоненты ускорения в центробежном направлении, обнаруженного G-датчиком 2b, CU 2c датчика определяет момент передачи TPMS-данных в режиме передачи в постоянной позиции. Ускорение в центробежном направлении, действующее на TPMS-датчик 2, изменяется в соответствии с ускорением/замедлением колес 1, кроме того, зависимая от гравитационного ускорения компонента всегда постоянна. Т.е. ускорение в центробежном направлении, действующее на TPMS-датчик, показывает форму волны с +1 [G] в верхней точке, -1 [G] в нижней точке и 0 [G] в среднем положении в 90° между верхней точкой и нижней точкой. Другими словами, наблюдая за величиной и направлением компоненты гравитационного ускорения из ускорения в центробежном направлении, возможно улавливать или идентифицировать угловое положение TPMS-датчика 2. В результате, например, выводя TPMS-данные на пике зависимой от гравитационного ускорения компоненты, TPMS-данные могут выводиться постоянно в верхней точке.
[0019] [Режим автообучения]
Когда время, которое прошло, составляет заданное время (например, 15 мин) или более от положения выключения до положения включения замка зажигания, TPMSCU 4 определяет, что могла быть выполнена перестановка шин.
Когда время, которое прошло от выключения до включения замка зажигания, короче, чем заданное время, на основе информации о давлении воздуха в TPMS-данных, передаваемых от каждого TPMS-датчика 2, TPMSCU 4 выполняет "режим наблюдения", в котором наблюдается давление воздуха в шине каждого колеса 1. С другой стороны, когда прошедшее время от выключения до включения замка зажигания продолжительнее, чем заданное время, TPMSCU 4 выполняет "режим автообучения", который будет выполняться до тех пор, пока положения колес всех TPMS-датчиков 2 не будут определены, или до тех пор, пока не пройдет заданное совокупное время движения (например, 8 мин) от начала этого режима. Когда положения колес всех TPMS-датчиков определены, или заданное совокупное время прошло, управление переходит в режим наблюдения.
[0020] Даже в режиме автообучения по-прежнему можно наблюдать за давлением воздуха в шинах из информации о давлении воздуха, содержащейся в TPMS-данных. Следовательно, отображение давления воздуха и предупреждение о пониженном давлении воздуха выполняются на основе соотношения соответствия между ID датчика и положением колеса, в настоящий момент сохраненного в памяти 4d во время автоматического режима движения.
В режиме автообучения TPMSCU 4 принимает значение счетчика импульсов скорости колеса от блока ABS-управления (ABSCU) 6 через CAN-шину 7 связи и выполняет управление определением положения колеса, описанное ниже.
[0021] [Управление определением положения колеса]
Фиг. 3 - это блок-схема управления TPMSCU 4 для выполнения управления определением положения колеса. TPMSCU 4 имеет блок вычисления углового положения (механизм обнаружения углового положения) 4a, секцию 4b вычисления дисперсии, секцию 4c определения положения колеса (механизм определения положения колеса), память 4d, блок 4e запрещения обнаружения углового положения (механизм запрещения обнаружения).
Блок 4a вычисления углового положения принимает TPMS-данные после декодирования, чтобы выводить их из приемника 3, и значения счетчика импульсов скорости колеса, выведенные из ABSCU 6 в CAN-линию 7 связи, чтобы вычислять угловое положение (число зубцов ротора) для каждого ротора, когда угловое положение каждого TPMS-датчика принимает верхнюю точку. Отметим, что "число зубцов" указывает, какой зубец датчика 8 скорости колеса подсчитывается, и может быть получено делением значения счетчика импульсов скорости колеса на значение счетчика при каждом обороте шины (т.е. число зубцов при каждом обороте z=48). В первом варианте осуществления, когда значение счетчика импульсов скорости колеса первого интервала времени от начала режима автообучения вводится, значение, полученное добавлением 1 к остатку операции деления значения счетчика числа зубцов 1 цикла или оборота, принимается в качестве опорного числа зубцов. Во второй и последующие разы, на основе числа счетчика импульсов скорости колеса относительно опорного числа зубцов (т.е. текущее значение счетчика - значение счетчика в первый раз), число зубцов может быть определено.
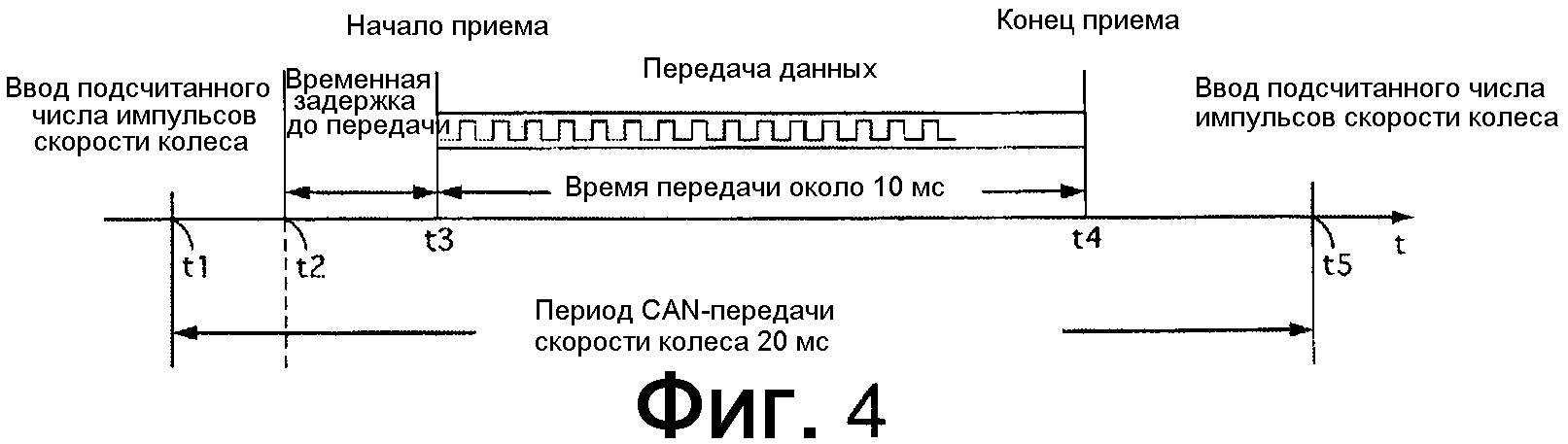
[0022] Фиг. 4 - это схема, показывающая способ вычисления углового положения каждого колеса 1.
На фиг. 4 t1 представляет время, когда значение счетчика импульсов скорости колеса вводится; t2 представляет время, когда угловое положение TPMS-датчика 2 достигает верхней точки; t3 представляет время, когда TPMS-датчик 2 фактически начинает передачу TPMS-данных; t4 представляет время, когда прием TPMS-данных посредством TPMSCU 4 завершается; и t5 представляет время, когда значение счетчика импульсов скорости колеса вводится. В этом случае, t1, t4 и t5 могут быть фактически измерены; t3 может быть вычислено посредством вычитания длины данных (номинальное значение, например, около 10 мс) для TMPS-данных из t4; а t2 может быть вычислено посредством вычитания временного запаздывания при передаче (t2 может быть определено заранее посредством эксперимента или т.п.) из t3.
Следовательно, предполагаемым числом зубцов в t1 является zt1, числом зубцов в t2 является zt2, а числом зубцов в t5 является zt5, соответственно, устанавливается равенство, которое следует ниже.
(t2−t1)/(t5−t1)=(zt2−zt1)/(zt5−zt1)
Поскольку
zt2=zt1+(zt5−zt1)*(t2−t1)/(t5−t1)
число зубцов zt2 выражается следующим образом, когда угловое положение TPMS-датчика 2 находится в верхней точке:
zt2=zt1+ (zt5−zt1)*(t 2−t1)/(t5−t1)
[0023] Секция 4b вычисления дисперсии накапливает угловое положение каждого колеса 1, которое вычисляется в блоке 4a вычисления углового положения для ID каждого датчика, чтобы получать данные углового положения, и вычисляет степень дисперсии в каждых данных углового положения для ID каждого датчика в качестве значения дисперсионной характеристики. Вычисление значения дисперсионной характеристики выполняется каждый раз, когда угловое положение для идентичного ID датчика вычисляется посредством блока 4a вычисления углового положения.
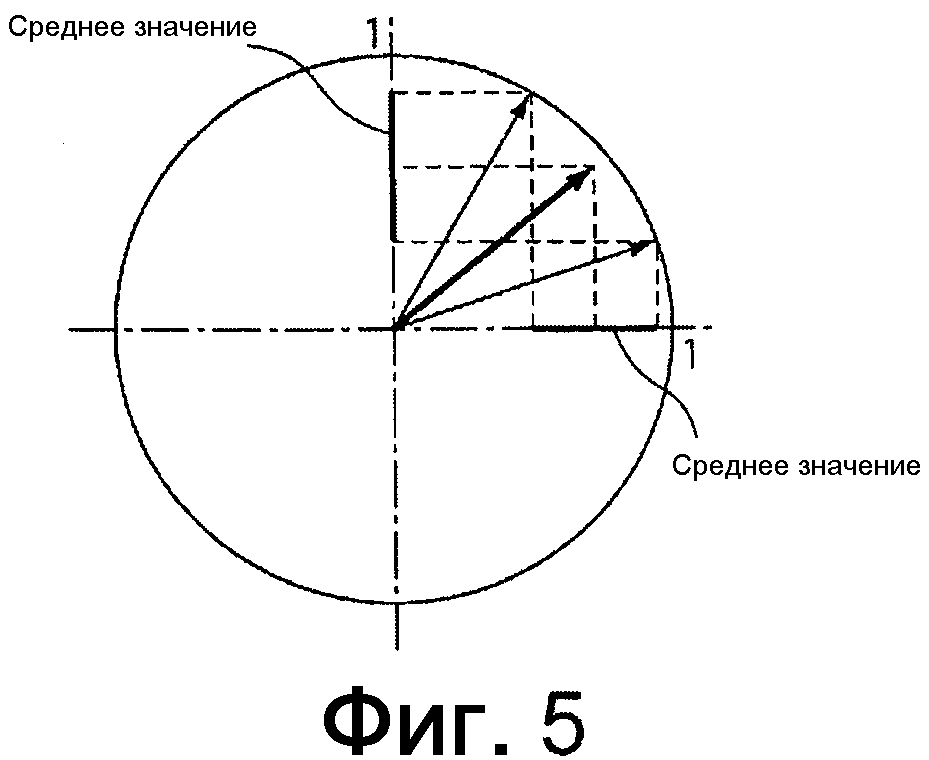
Фиг. 5 - это схема, иллюстрирующая способ вычисления значения дисперсионной характеристики. Согласно первому варианту осуществления предполагается единичная окружность (окружность с радиусом, равным 1) с исходной точкой (0, 0) на двухмерной плоскости, и угловое положение θ [град.] (=360×число зубцов ротора/48) каждого колеса 1 преобразуется в окружные координаты (cos θ, sin θ) на единичной окружности. Более конкретно, угловое положение каждого колеса 1 вычисляется следующим образом: рассмотрим вектор, имеющий исходную точку (0, 0) в качестве начальной точки и координаты (cos θ, sin θ) в качестве конца с длиной, равной 1, средние векторы (ave_cos θ, ave_sin θ) каждого вектора одних и тех же данных углового положения получаются, и скалярная величина среднего вектора вычисляется в качестве значения X дисперсионной характеристики данных углового положения:
(cos θ, sin θ)=(cos((zt2+1)*2π/48), sin((zt2+1)*2π/48))
Следовательно, предположим число случаев приема TPMS-данных относительно идентичного ID датчика как n (n является положительным целым), средние векторы (ave_cos θ, ave_sin θ) выражаются следующим образом:
(ave_cos θ, ave_sin θ)=((Σ(cos θ))/n, (Σ(sin θ))/n)
Значение X дисперсионной характеристики может, таким образом, быть представлено как следующее:
X=ave_cos θ2+ave_sin θ2
[0024] Блок 4c определения положения колеса работает следующим образом. Значения X дисперсионной характеристики каждых данных углового положения одного и того же и идентичного ID датчика, вычисленные посредством блока 4b вычисления дисперсии, сравниваются. Когда наибольшее значение из значений X дисперсионной характеристики больше, чем первое пороговое значение (например, 0,57), а оставшиеся 3 значения X дисперсионной характеристики, все меньше, чем второе пороговое значение (например, 0,37), выполняется определение, что положение колеса из данных углового положения, соответствующих значению X дисперсионной характеристики с наибольшим значением, т.е. положение колеса датчика 8 скорости колеса, который обнаружил соответствующие данные углового положения, является положением колеса TPMS-датчика 2, соответствующего ID датчика из данных углового положения. Это определение выполняется для всех ID датчиков; получается соотношение соответствия между ID каждого датчика и положением каждого колеса, чтобы их зарегистрировать в памяти 4d в процессе обновления.
Блок 4e запрещения обнаружения углового положения запрещает или препятствует блоку 4a вычисления углового положения в вычислении углового положения каждого колеса 1, когда какое-либо колесо 1 находится под управлением торможением, в котором давление рабочего тормозного цилиндра управляется (например, антиблокировочное управление торможением, управление стабильностью поведения транспортного средства, антипробуксовочное управление с использованием тормоза, и LSD-управление с использованием тормоза) посредством ABSCU 6. Определение относительно того, уместно ли управление торможением или находится в процессе, может быть выполнено на основе значения управляющего флага, который вводится через CAN-линию 7 связи.
[0025] [Процесс управления определением положения колеса]
Фиг. 6 - это блок-схема последовательности операций, иллюстрирующая процесс управления определением положения колеса согласно первому варианту осуществления. В последующем, соответствующие этапы операции будут описаны. В последующем описании предполагается случай, когда ID датчика равен "1". Однако для других ID (ID=2, 3, 4), процесс управления определением положения колеса также выполняется параллельно.
На этапе S1 блок 4a вычисления углового положения принимает TPMS-данные с ID датчика, равным 1.
На этапе S2 блок 4e запрещения обнаружения углового положения определяет, выполняется или нет управление торможением в текущий момент, и, если да, управление возвращается к этапу S1, если нет, управление переходит к этапу S3.
На этапе S3 секция 4a вычисления углового положения вычисляет угловое положение каждого колеса 1.
[0026] На этапе S4 блок 4b вычисления дисперсии вычисляет значение X дисперсионной характеристики данных углового положения каждого колеса 1.
На этапе S5 выполняется определение относительно того, приняты ли TPMS-данные с ID датчика, равным 1, заданное число раз (например, 10 раз) или более. Если результатом определения является "Да", операция переходит к этапу S6. Если определением является "Нет", операция возвращается к этапу S1.
На этапе S6 секция 4c определения положения колеса определяет, превышает или нет наибольшее значение значения характеристик первое пороговое значение 0,57, и меньше или нет значение оставшихся значений дисперсионных характеристик второго порогового значения 0,37. Если определением является "Да", операция переходит к этапу S7; если результатом определения является "Нет", операция переходит к этапу S8.
[0027] На этапе S7 секция 4c определения положения колеса определяет положение колеса из данных углового положения, соответствующих наивысшему значению дисперсионной характеристики, в качестве положения колеса для ID датчика. Затем процесс автообучения заканчивается.
На этапе S8 секция 4c определения положения колеса определяет, прошло ли заданное совокупное или накопленное время движения (например, 8 мин) от начала режима автообучения. Если результатом определения является "Да", режим автообучения завершается. Если результатом определения является "Нет", операция возвращается к этапу S1.
Когда секция 4c определения положения колеса может определять положения колес для всех ID датчиков в течение заданного накопленного времени движения, соотношение соответствия между ID датчика и положением колеса обновляется и сохраняется в памяти 4d для регистрации. С другой стороны, когда невозможно определять положение колеса для всех ID датчиков в течение заданного накопленного времени движения, соотношение соответствия между множеством ID датчиков и положением каждого колеса, в настоящий момент сохраненное в памяти 4d, продолжает использоваться.
[0028] Далее поясняется процесс.
[Операция определения положения колеса посредством степени дисперсии данных углового положения]
TPMS-датчик 2 работает следующим образом: когда время определения остановки транспортного средства непосредственно перед началом движения транспортного средства составляет 15 мин или дольше, выполняется определение, что существует вероятность того, что выполнена перестановка шин, и операция переходит из обычного режима в режим передачи в постоянной позиции. В режиме передачи в постоянной позиции, после того как 16 секунд прошло от времени передачи в предыдущий раз, и угловое положение рассматриваемого TPMS-датчика достигает верхней точки, каждый TPMS-датчик 2 передает TPMS-данные.
[0029] С другой стороны, когда прошедшее время между выключением и включением замка зажигания составляет 15 мин или дольше, TPMSCU 4 переходит из режима наблюдения в режим автообучения. В режиме автообучения, каждый раз когда TPMS-данные принимаются от каждого TPMS-датчика 2, TPMSCU 4 вычисляет угловое положение (число зубцов ротора) каждого колеса 1, когда угловое положение TPMS-датчика 2 достигает верхней точки, на основе времени ввода значения счетчика импульсов скорости колеса, времени завершения приема TPMS-данных и т.п. Это выполняется повторно 10 или более раз и накапливается в качестве данных углового положения. Среди данных углового положения положение колеса, данные углового положения которого имеют наименьшую степень дисперсии, определяется в качестве положения колеса этого TPMS-датчика 2.
[0030] Когда транспортное средство перемещается или движется, скорости вращения каждого колеса 1 могут отличаться друг от друга вследствие различия в колеях между внешними и внутренними колесами, блокировки и проскальзывания колес 1 и различия в давлении воздуха в шинах. Даже когда транспортное средство движется прямо, поскольку водитель все еще может совершать мгновенные корректировки на рулевом колесе, и существует некоторое различие в поверхности дороги между левой и правой сторонами, различие в скорости вращения опять же развивается между передними и задними колесами 1FL и 1FR и между левыми и правыми колесами 1RL и 1RR. Т.е. пока существует различие в скорости вращения каждого колеса в соответствии с состоянием движения транспортного средства, поскольку TPMS-датчик 2 и датчик 8 скорости колеса (зубцы его ротора) вращаются вместе, в течение периода вывода конкретного TPMS-датчика 2, период вывода датчика 8 скорости колеса, ассоциированного с тем же колесом, сохраняется синхронизированным (согласующимся) независимо от расстояния перемещения и состояния движения.
[0031] Следовательно, наблюдая степень дисперсии в данных углового положения каждого колеса 1 относительно периода передачи TPMS-данных, возможно выполнить высокоточное определение по положениям колес каждого TPMS-датчика 2.
Фиг. 7 иллюстрирует соотношение между угловыми положениями (числом зубцов роторов) колес 1FL, 1FR, 1RL и 1RR, когда угловое положение TPMS-датчика 2FL левого переднего колеса 1FL достигает верхней точки, и числом случаев приема TPMS-данных. Здесь (a) соответствует датчику 8FL скорости колеса для левого переднего колеса 1FL, (b) соответствует датчику 8FR скорости колеса для правого переднего колеса 1FR, (c) соответствует датчику 8RL скорости колеса для левого заднего колеса 1RL и (d) соответствует датчику 8RR скорости колеса для правого заднего колеса 1RR.
Как будет очевидно из фиг. 7, тогда как степени дисперсии являются высокими относительно положения колес (числа зубцов), полученных от датчиков 8FR, 8RL и 8RR скорости колеса относительно других колес (правого переднего колеса 1FR, левого заднего колеса 1RL и правого заднего колеса 1RR), степень дисперсии положения колеса, полученного от датчика 8FL скорости колеса относительно рассматриваемого колеса (левого переднего колеса 1FL) является минимальной или наименьшей, так что период вывода TPMS-датчика 2FL и период вывода датчика 8FL скорости колеса почти синхронизированы друг с другом.
[0032] В качестве одного из традиционных устройств контроля давления воздуха в шинах, датчик угла наклона размещается для каждого TPMS-датчика, и соотношение между положением колеса TPMS-датчика и углом наклона используется, чтобы определять положение колеса TPMS-датчика. Для этого типа устройства контроля давления воздуха в шине согласно движущемуся транспортному средству имеет место различие в скорости вращения между 4 колесами, так что соответствие между положением колеса TPMS-датчика и углом наклона изменяется. В результате невозможно выполнять высокоточное определение по положению колеса каждого TPMS-датчика.
В качестве другого традиционного устройства контроля давления воздуха в шинах, такое же число приемников, что и число TPMS-датчиков, размещаются рядом с датчиками, соответственно; на основе интенсивности электромагнитных волн принятых беспроводных сигналов определяется положение колеса каждого TPMS-датчика. Здесь необходимо учитывать вывод датчика, дисперсию чувствительности приемника и эффект от комплекта антенн для компоновки приемных устройств, и окружение приема и схема размещения определяют рабочие характеристики. Помимо этого должны размещаться 4 приемника. Следовательно, затраты являются более высокими.
С другой стороны, для устройства контроля давления воздуха в шинах в первом варианте осуществления положение колеса каждого TPMS-датчика 2 может быть указано без использования интенсивности электромагнитных волн, так что возможно определять положение колеса каждого TPMS-датчика 2 независимо от окружения приема и схемы размещения. Кроме того, достаточно одного приемника 3, что приводит к устранению затрат для дополнительных датчиков.
[0033] Кроме того, согласно первому варианту осуществления TPMSCU 4 вычисляет и определяет, что угловое положение каждого колеса 1 позиционируется в верхней точке на основе зависимой от гравитационного ускорения компоненты ускорения в центробежном направлении, которая может быть обнаружена из G-датчика 2b. Поскольку G-датчик 2b используется в существующем устройстве контроля давления воздуха в шинах для обнаружения остановки и перемещения транспортного средства, существующий TPMS-датчик может быть использован в различных целях, так что нет необходимости добавлять новые датчики на стороне транспортного средства. Таким образом, затраты могут быть снижены.
[0034] [Операция при определении степени дисперсии из значения дисперсионной характеристики]
Поскольку угловое положение колеса 1 указывается угловыми данными с периодичностью, степень дисперсии углового положения не может быть определена с помощью общей дисперсионной формулы, определенной посредством среднего "квадрата разности из среднего числа или средней величины".
Таким образом, в первом варианте осуществления блок 4b вычисления дисперсии работает следующим образом. Угловое положение θ каждого колеса 1, полученное от каждого датчика 8 скорости колеса, преобразуется в окружные координаты (cos θ, sin θ) единичной окружности, имеющей исходную точку (0, 0) в центре. Координаты (cos θ, sin θ) принимаются в качестве векторов, получаются средние векторы (ave_cos θ, ave_sin θ) векторов одинаковых данных углового положения, и вычисляется скалярная величина среднего вектора в качестве значения X дисперсионной характеристики. В результате возможно избегать периодичности в определении степени дисперсии углового положения.
[0035] Фиг. 8 показывает схему, иллюстрирующую изменение в значении X дисперсионной характеристики в соответствии с числом приемов TPMS-данных. На фиг. 8 рассматриваемое колесо показывает значение X дисперсионной характеристики, вычисленное по данным углового положения датчика 8 скорости колеса на том же колесе, на котором установлен TPMS-датчик, тогда как другие колеса показывают значение X дисперсионной характеристики, вычисленное по данным углового положения датчика 8 скорости колеса на колесе, отличном от тех, на которых установлены TPMS-датчики.
Как показано на фиг. 8, когда число приемов TPMS-данных по одному и тому же ID датчика увеличивается, указывается такая тенденция, в которой дисперсионная характеристика X приближается к "1", в то время как значение X дисперсионной характеристики для другого колеса приближается к "0". Таким образом, может быть идеальным выбирать максимальное значение (т.е. значение дисперсионной характеристики, самое близкое к "1") при достижении достаточного числа приемов (около нескольких десятков раз). Однако, поскольку невозможно сообщать водителю точную информацию о состоянии шин во время периода определения положения колеса непосредственно после перестановки шин, задержка во времени определения не является предпочтительной. С другой стороны, при недостаточном числе приемов (например, несколько раз), различие в значении дисперсионной характеристики относительно рассматриваемого и других колес не может быть обнаружено, и будет ожидаться уменьшение точности определения.
[0036] Таким образом, в первом варианте осуществления блок 4c определения положения колеса сравнивает значения дисперсионных характеристик по каждым данным углового положения относительно конкретного ID датчика при приеме TPMS-данных относительно этого конкретного датчика десять раз или более и обнаруживает, что максимальное значение из значений X дисперсионной характеристики превышает первое пороговое значение 0,57, тогда как остальные три значения дисперсионной характеристики падают ниже второго порогового значения 0,37, затем положение колеса из данных углового положения, соответствующих максимальному значению X дисперсионной характеристики, будет идентифицировано в качестве положения колеса этого ID датчика.
Не только посредством выбора максимального значения из значений дисперсионной характеристики, но и сравнивая максимальное значение с первым пороговым значением (0,57), может быть гарантирована некоторая степень точности определения. Кроме того, сравнивая значения дисперсионной характеристики, отличные от максимального значения, со вторым пороговым значением (0,37), может быть подтверждена предварительно определенная разность (0,2 или более), что дополнительно улучшает точность определения. Следовательно, при относительно небольшом числе приемов, например, десять, могут быть достигнуты как точность определения, так и сокращение времени определения.
[0037] [Операция прерывистой передачи TPMS-данных]
Каждый TPMS-датчик 2 передает TPMS-данные, после того как прошло 16 секунд от предыдущего времени передачи TPMS-данных и в момент времени, в который рассматриваемое угловое положение достигает верхней точки. В первом варианте осуществления, поскольку значения X дисперсионной характеристики каждых данных углового положения сравниваются друг с другом для определения положения колеса относительно TPMS-датчика 2, который передал TPMS-данные, некоторая величина совокупного расстояния перемещения будет необходима для того, чтобы вызывать различие в значениях X дисперсионной характеристики между рассматриваемым колесом (тем же колесом) и другим колесом (другим колесом транспортного средства).
Предположим, что TPMS-данные передавались бы каждый раз, когда угловое положение TPMS-данных достигает верхней точки, никакого существенного различия в значении дисперсионной характеристики не будет ожидаться между рассматриваемым и другим колесом, так что может быть затруднительным выполнять определение положения колеса.
Таким образом, устанавливая интервал передачи в 16 секунд + α, некоторая величина совокупного интервала перемещения будет получена, пока TPMS-данные не будут приняты десять раз или более. Следовательно, достаточное различие в значении X дисперсионной характеристики между рассматриваемым и другим колесом может быть создано, чтобы гарантировать точное определение положения колеса.
[0038] [Операция уменьшения потребления энергии]
При приеме TPMS-данных сорок (40) раз во время режима передачи в постоянной позиции TPMS-датчик 2 переходит в обычный режим. TPMS-датчик 2 потребляет энергию батареи 2e таблеточного типа при передаче TPMS-данных, так что срок эксплуатации батареи для батареи 2e таблеточного типа будет короче, поскольку режим передачи в постоянной позиции продолжается. Таким образом, когда положение каждого колеса не может быть определено, несмотря на прохождение достаточного совокупного времени перемещения, режим передачи в постоянной позиции будет завершен, чтобы переходить в обычный режим, что может пресекать сокращение срока эксплуатации батареи.
С другой стороны, когда TPMSCU 4 не может определить соответствие между ID каждого датчика и положением каждого колеса, несмотря на прошедшее время совокупного перемещения в восемь (8) минут, режим автообучения будет завершен, и процесс переходит в режим наблюдения. Общее число TPMS-данных составляет тридцать (30) раз или менее, когда прошло совокупное время перемещения в восемь минут, режим автообучения может быть завершен, по существу, синхронно с завершением режима передачи в постоянной позиции TPMS-датчика 2.
[0039] [Операция пресечения задержки определения положения колеса]
CU 2с датчика для TPMS-датчика 2 определяет угловое положение TPMS-датчика 2 на основе зависимой от гравитационного ускорения компоненты центробежного ускорения, определенного посредством G-датчика 2b, во время режима передачи в постоянной позиции и передает TPMS-данные на пике зависимой от гравитационного ускорения компоненты, так что TPMS-данные будут передаваться в верхней точке во все моменты времени передачи. Хотя центробежное ускорение, влияющее на TPMS-датчик 2, может быть подвержено изменению вследствие ускорения/замедления колеса 1, зависимая от гравитационного ускорения компонента постоянно получает форму волны постоянной ширины (от -1 до 1 [G]) и изменения с чрезвычайно более коротким периодом по сравнению со скоростью изменения в центробежном ускорении, сопровождаемом ускорением/замедлением транспортного средства. Следовательно, легко улавливать изменение в зависимой от гравитационного ускорения компоненте на основе центробежных ускорений.
[0040] Однако, когда управление торможением, такое как ABS-управление и антипробуксовочное управление с использованием тормоза, выполняется, колесо 1 под управлением подвержено колебанию в продольном направлении в очень коротком периоде вследствие этого управления, на центробежное ускорение, обнаруженное посредством G-датчика 2b, будет оказываться влияние, и оно будет колебаться в очень коротком периоде с большой шириной или амплитудой (несколько десятков [G] или более). Таким образом, CU 2c датчика может ложно определять колебания или флуктуации как пик в зависимой от гравитационного ускорения компоненте, так что существует вероятность того, что TPMS-данные будут передаваться в угловом положении, отличном от пика.
Таким образом, блок 4a вычисления углового положения TPMSCU 4 вычисляет угловое положение каждого колеса 1 в момент времени, в который угловое положение каждого TPMS-датчика 2 достигло своего пика, на основе момента времени приема TPMS-данных и значения счетчика импульсов скорости колеса для каждого колеса в этот момент времени. Следовательно, блок 4a вычисления углового положения вычисляет угловое положение каждого колеса 1, которое было передано в угловом положении, отличном от верхней точки, как угловое положение, переданное в верхней точке, и блок 4b вычисления дисперсии должен вычислять значение X дисперсионной характеристики для каждого колеса 1, включая это угловое положение в данные углового положения. Следовательно, вследствие включения ложных данных углового положения в данные углового положения для каждого колеса, формирование различия между максимальным значением и другими значениями для каждого значения X дисперсионной характеристики будет задерживаться, и определение положения колеса будет задерживаться.
[0041] В отличие от этого, в первом варианте осуществления блок 4e запрещения обнаружения углового положения запрещает блоку 4a вычисления углового положения обнаруживать угловое положение для каждого колеса, когда выполняется управление торможением, такое как ABS-управление.
Более конкретно, когда существует вероятность того, что момент передачи TPMS-данных отличается от нормального или обычного момента передачи, посредством запрещения вычисления углового положения каждого колеса на основе этих TPMS-данных вычисление значения X дисперсионной характеристики с использованием ошибочных или ложных данных будет пресекаться.
Другими словами, когда существует вероятность того, что момент времени передачи TPMS-данных реализован как момент времени, отличный от нормального или обычного момента, тогда посредством запрещения вычисления углового положения каждого колеса 1 будет предотвращено включение ошибочных данных углового положения в данные углового положения для каждого колеса. Следовательно, задержка в определении положения колеса будет подавлена, и соотношение соответствия между ID каждого датчика и положением каждого колеса может быть определено на раннем этапе.
[0042] Теперь выполняется описание результатов.
В устройстве контроля давления воздуха в шинах в первом варианте осуществления достигаются следующие результаты.
(1) В устройстве контроля давления воздуха в шинах, которое наблюдает за давлением воздуха каждой шины, предусмотрены датчик 2a давления, который обнаруживает давление воздуха шины, и который установлен на шине каждого колеса 1; датчик 2a давления для обнаружения давления воздуха шины; G-датчик 2b, который установлен на шине каждого колеса 1 и обнаруживает центробежное ускорение, действующее на шину; и передатчик 2d, который установлен на каждом колесе 1 и измеряет угловое положение колеса на основе обнаруженного значения G-датчика 2b, чтобы передавать в качестве беспроводного сигнала давление воздуха в заданном угловом положении вместе с ID датчика; приемник 3, который размещен на стороне кузова транспортного средства и принимает беспроводной сигнал, блок 4a вычисления углового положения, установленный на стороне кузова транспортного средства и определяющий угловое положение каждого колеса 1, когда беспроводной сигнал включает в себя ID конкретного датчика, блок 4c определения положения колеса, который определяет положение колеса передатчика, соответствующего этому конкретному ID датчика, на основе углового положения каждого колеса 1, и блок 4e запрещения обнаружения углового положения, который запрещает обнаружение углового положения каждого колеса 1 блоком 4a вычисления углового положения.
Таким образом, задержка в определении положения колеса вследствие колебания колеса 1, вызванного управлением торможением, может быть пресечена, и соответствие между ID каждого датчика и положением каждого колеса может быть своевременно установлено.
[0043] (2) Блок 4c определения положения колеса получает угловое положение для каждого колеса 1 множество раз, накапливает данные углового положения для каждого колеса и определяет положение колеса, соответствующее данным углового положения с наименьшей степенью дисперсии среди данных углового положения, как положение колеса передатчика 3, соответствующего ID конкретного датчика.
Таким образом, соотношение соответствия между каждым TPMS-датчиком 2 и положением каждого колеса может быть определено с высокой точностью.
[0044] (3) G-датчик 2b обнаруживает центробежное ускорение, оказываемое на шину, в то время как TPMS-датчик 2 обнаруживает угловое положение колеса на основе зависимой от гравитационного ускорения компоненты центробежного ускорения.
Таким образом, даже в состоянии ускорения/замедления транспортного средства угловое положение колеса может быть обнаружено с хорошей точностью.
[0045] [Другие варианты осуществления]
В то время как лучшие варианты осуществления описаны, чтобы реализовывать настоящее изобретение, конкретная конфигурация не ограничена этими вариантами осуществления. Наоборот, изменение конструкции или модификации, которые не отступают от сущности настоящего изобретения, могут быть включены в настоящее изобретение.
Например, G-датчик может обнаруживать ускорение, оказываемое в направлении вращения шины, и обнаруживает угловое положение по этому обнаруженному ускорению. Во время постоянного движения транспортного средства, при котором ускорение/замедление не возникает в направлении вращения шины, ускорение, действующее на шину, равно "0" [G] либо вверху, либо внизу шины, при этом предполагается равным "1" [G] или "-1" [G] в переднем и обратном направлении, соответственно. Следовательно, передавая TPMS-данные в момент времени, когда обнаруженное значение датчика ускорения предполагается равным "1" или "-1", TPMS-данные могут передаваться в постоянном угловом положении.
Реферат
Изобретение относится к устройству контроля давления воздуха в шинах транспортных средств. Устройство содержит: блок (4a) вычисления углового положения, который обнаруживает угловое положение для каждого колеса, когда беспроводной сигнал, включающий в себя конкретный ID датчика, передан; блок (4c) определения положения колеса, который получает угловое положение каждого колеса множество раз и накапливает его в качестве данных углового положения для каждого колеса и определяет положение колеса, соответствующее данным углового положения с наименьшей степенью дисперсии среди всех данных углового положения, как положение колеса передатчика (2d), соответствующего ID датчика; и блок (4e) запрещения обнаружения углового положения, который запрещает обнаружение углового положения каждого колеса блоком (4a) вычисления углового положения, когда выполняется управление торможением, которое управляет давлением рабочего тормозного цилиндра колеса. Технический результат - повышение скорости определения положения колеса. 2 н. и 4 з.п. ф-лы, 8 ил.
Формула
датчик давления воздуха в шине, установленный на шине каждого колеса, чтобы обнаруживать давление воздуха в шине, действующее на шину;
датчик ускорения, установленный на шине каждого колеса, чтобы обнаруживать ускорение в заданном направлении, действующее на шину;
передатчик, размещенный на каждом колесе, чтобы обнаруживать угловое положение колеса на основе обнаруженного значения датчика ускорения, для передачи давления воздуха вместе с идентификационной информацией, уникальной для каждого передатчика, через беспроводной сигнал;
приемник, установленный на кузове транспортного средства, чтобы принимать беспроводной сигнал;
блок обнаружения углового положения, установленный на кузове транспортного средства, чтобы обнаруживать угловое положение каждого колеса, когда конкретная идентификационная информация была передана;
блок определения положения колеса, который получает угловое положение каждого колеса множество раз, чтобы накапливать данные углового положения для каждого колеса, и определяет положение колеса, соответствующее данным углового положения с наименьшей степенью дисперсии среди данных углового положения, как положение колеса передатчика, соответствующего конкретной идентификационной информации; и
блок запрещения обнаружения, который запрещает накопление данных углового положения каждого колеса блоком обнаружения положения колеса, когда выполняется управление торможением, чтобы управлять давлением рабочего тормозного цилиндра колеса.
датчик давления воздуха в шине, установленный на шине каждого колеса, чтобы обнаруживать давление воздуха в шине, действующее на шину;
датчик ускорения, установленный на шине каждого колеса, чтобы обнаруживать ускорение в заданном направлении, действующее на шину;
передатчик, размещенный на каждом колесе, чтобы обнаруживать угловое положение колеса на основе обнаруженного значения датчика ускорения, для передачи давления воздуха вместе с идентификационной информацией, уникальной для каждого передатчика, через беспроводной сигнал;
приемник, установленный на кузове транспортного средства, чтобы принимать беспроводной сигнал;
блок обнаружения углового положения, установленный на кузове транспортного средства, чтобы обнаруживать угловое положение каждого колеса, когда конкретная идентификационная информация была передана;
блок определения положения колеса, который получает угловое положение каждого колеса множество раз, чтобы накапливать данные углового положения для каждого колеса, и определяет положение колеса, соответствующее данным углового положения с наименьшей степенью дисперсии среди данных углового положения, как положение колеса передатчика, соответствующего конкретной идентификационной информации; и
блок запрещения обнаружения, который запрещает обнаруживать угловое положение каждого колеса посредством блока обнаружения углового положения, когда выполняется управление торможением, чтобы управлять давлением рабочего тормозного цилиндра колеса, при этом
блок определения положения колеса сконфигурирован так, чтобы преобразовывать угловое положение колеса в вектор на двухмерной плоскости с собственной исходной точкой в качестве начальной точки и окружной точкой единичной окружности в качестве конечной точки, вычислять скалярную величину среднего вектора каждых данных углового положения в качестве значения дисперсионной характеристики и определять максимальное значение каждого значения дисперсионной характеристики как значение с наименьшей степенью дисперсии.
управление торможением является антиблокировочным управлением торможением, в котором колесо с тенденцией блокировки сдерживается посредством регулирования давления рабочего тормозного цилиндра колеса.
управление торможением является управлением стабильностью поведения транспортного средства, чтобы обеспечивать стабильность вождения транспортного средства, при которой транспортное средство с тенденцией избыточного рулевого управления или недостаточного рулевого управления сдерживается посредством передачи тормозного усилия колесу.
управление торможением является антипробуксовочным управлением с использованием тормоза в ответ на холостое вращение ведущего колеса, чтобы пресекать холостое вращение ведущего колеса и увеличивать силу сцепления шины.
управление торможением является управлением ограничения дифференциала с использованием тормоза, чтобы ограничивать дифференциал с помощью тормоза.
Комментарии