Устройство контроля давления воздуха в шинах - RU2542854C1
Код документа: RU2542854C1
Чертежи






Описание
Область техники
[0001] Данное изобретение относится к устройству контроля давления воздуха в шинах.
Уровень техники
[0002] Согласно устройству контроля давления воздуха в шинах, описанному в патентном документе 1, каждый передатчик всегда отправляет беспроводной сигнал в предписанном угловом положении; когда беспроводные сигналы принимаются на стороне транспортного средства, обнаруживаются угловые положения колес; положение колеса, соответствующее угловому положению, которое лучше всего синхронизировано с периодом вывода беспроводного сигнала из угловых положений колес, определяется в качестве положения колеса соответствующего передатчика.
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. Выложенная заявка на патент (Япония) № 2010-122023
Раскрытие изобретения
Цель изобретения для достижения
[0004] Согласно предшествующему уровню техники, описанному выше по тексту, для передатчика, угловое положение передатчика определяется из обнаруженного значения датчика ускорения, и беспроводной сигнал выводится во время, когда обнаруженное значение датчика ускорения становится предписанным значением. Следовательно, когда обнаруженное значение датчика ускорения содержит шумы, вызываемые вкладом поверхности дороги и т.д., передатчик может неправильно считывать угловое положение и, таким образом, выводит беспроводной сигнал в угловом положении, отличающемся от предписанного углового положения. В этом случае данные некорректного углового положения принимаются при определении положения колеса (для) передатчика, так что снижается точность при определении положения колеса.
Назначение настоящего изобретения заключается в том, чтобы предоставить устройство контроля давления воздуха в шинах, которое может определять положение колеса каждого передатчика с высокой степенью точности.
Средство достижения цели
[0005] Чтобы реализовывать назначение, описанное выше по тексту, согласно настоящему изобретению, когда разность между первым периодом вращения, определенным на основе обнаружения посредством датчика ускорения, и вторым периодом вращения, определенным на основе обнаруженного значения посредством датчика скорости вращения колес, равна или меньше предписанного значения, выполняется определение так, что беспроводной сигнал передается в предписанном угловом положении; на основе угловых положений колес, когда передается беспроводной сигнал, определяется положение колеса передатчика, соответствующего идентификационной информации.
Эффект от изобретения
[0006] Когда разность между первым периодом вращения и вторым периодом вращения равна или меньше предписанного значения, существует высокая вероятность того, что беспроводной сигнал передается в предписанном угловом положении; с другой стороны, когда разность, описанная выше по тексту, превышает предписанное значение, существует высокая вероятность того, что беспроводной сигнал передается в угловом положении, отличном от предписанного углового положения. Следовательно, только когда разность, описанная выше по тексту, равна или меньше предписанного значения, угловые положения колес принимаются при определении положения колеса. Когда разность, описанная выше по тексту, превышает предписанное значение, угловые положения колес не принимаются при определении положения колеса. Как результат, можно выполнять высокоточное определение положения колеса передатчика.
Краткое описание чертежей
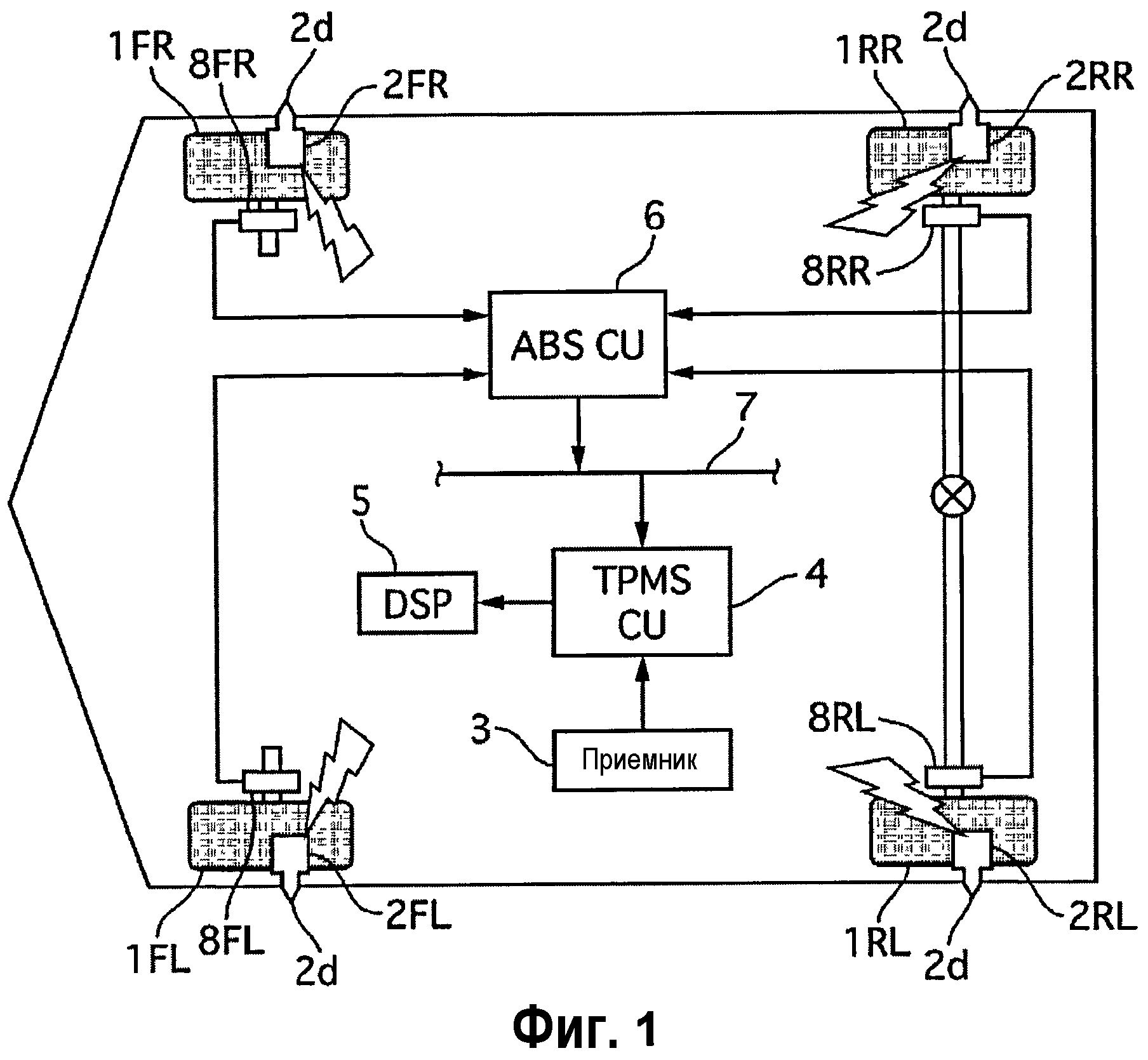
[0007] Фиг.1 является схемой, иллюстрирующей конфигурацию устройства контроля давления воздуха в шинах в примере 1 применения.
Фиг.2 является схемой, иллюстрирующей конфигурацию TPMS-датчика 2.
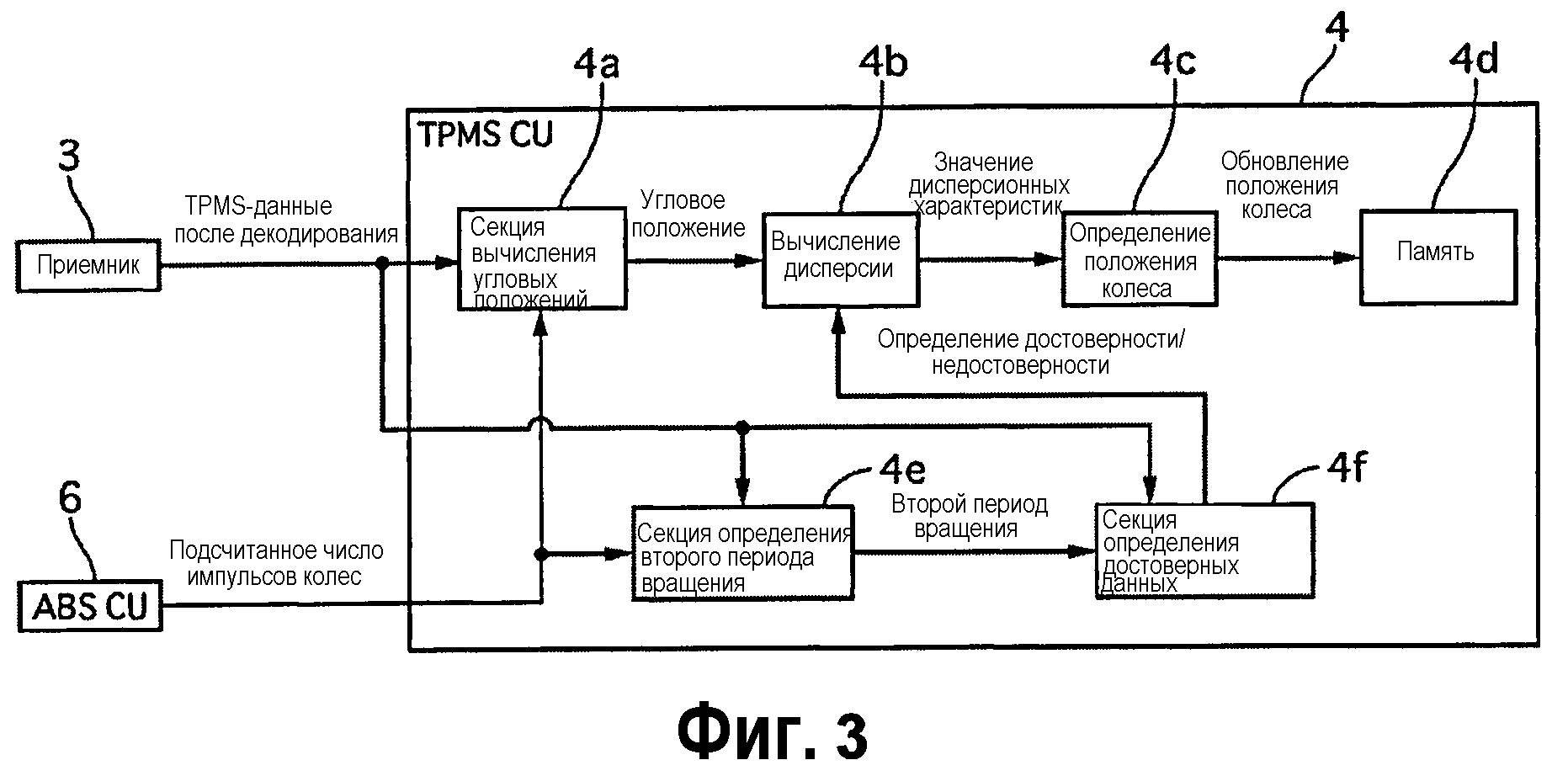
Фиг.3 является блок-схемой управления, иллюстрирующей TPMSCU 4 для выполнения управления определением положения колеса в примере 1 применения.
Фиг.4 является схемой, иллюстрирующей способ для вычисления периода вращения каждого колеса 1.
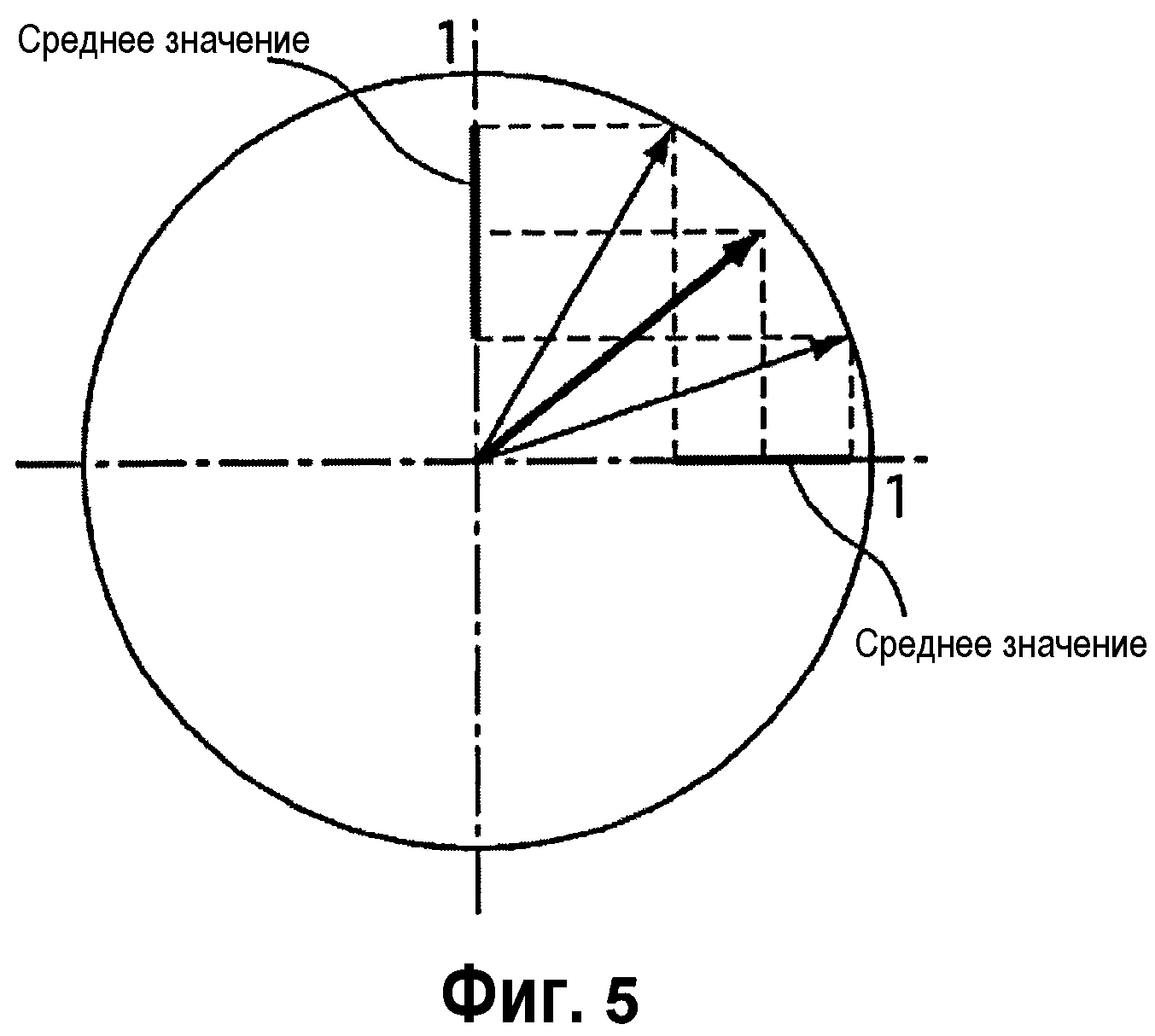
Фиг.5 является схемой, иллюстрирующей способ для вычисления значения дисперсионных характеристик.
Фиг.6 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса управления определением положения колеса в примере 1 применения.
Фиг.7 является схемой, иллюстрирующей взаимосвязь между угловыми положениями (числом зубьев ротора) колес 1FL, 1FR, 1RL, 1RR, когда угловое положение TPMS-датчика 2FL левого переднего колеса 1FL находится в наивысшей точке, и числом циклов приема TPMS-данных.
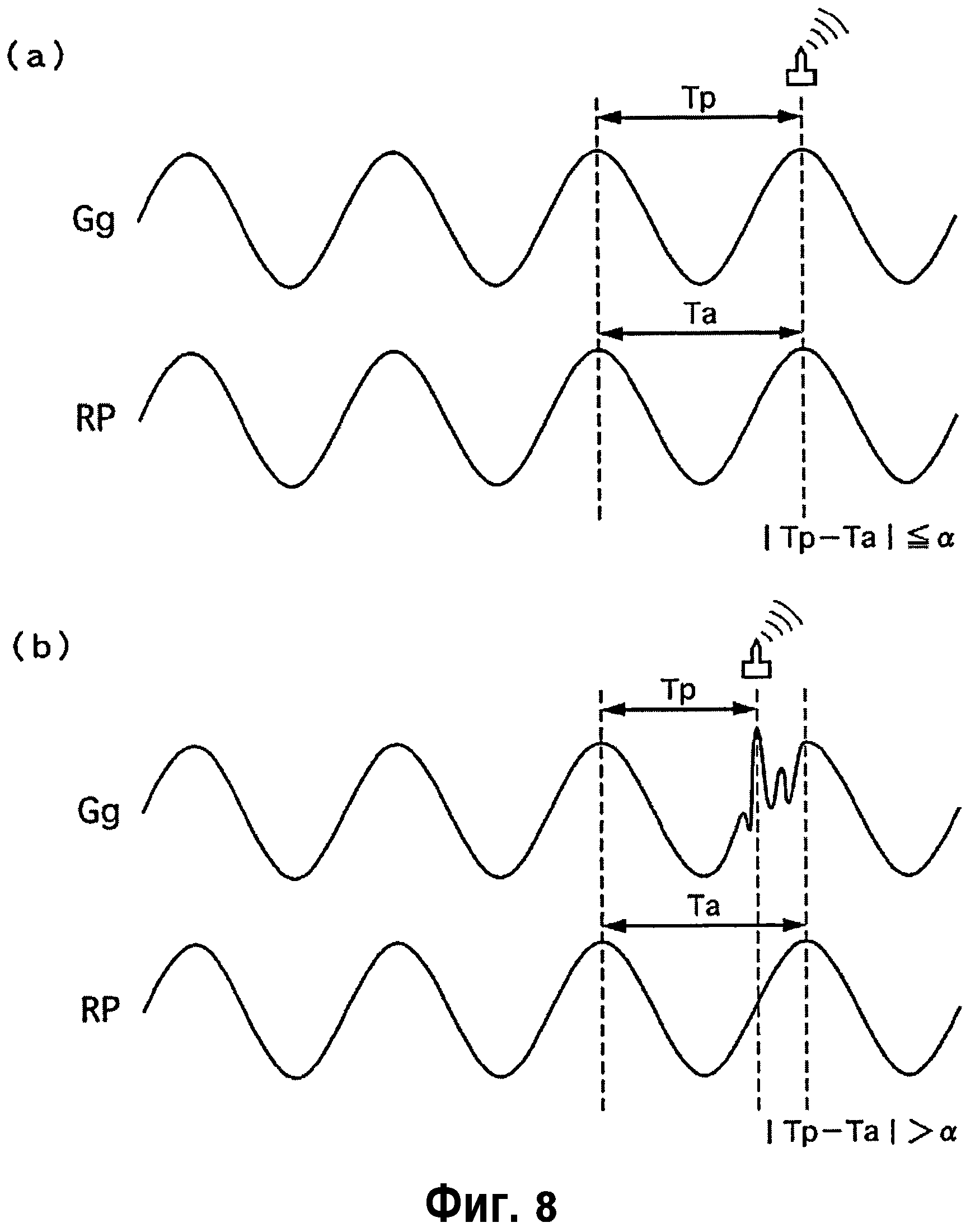
Фиг.8 является схемой, иллюстрирующей варьирование во времени зависимого от гравитационного ускорения компонента Gg ускорения в центробежном направлении, обнаруженного посредством G-датчика 2b некоторого колеса, и углового положения RP этого колеса, определенного из значения подсчета различных импульсов скорости вращения колес.
Фиг.9 является блок-схемой, иллюстрирующей управление TPMSCU 4 для выполнения управления определением положения колеса в примере 2 применения.
Фиг.10 является схемой, иллюстрирующей варьирование во времени зависимого от гравитационного ускорения компонента Gg ускорения в центробежном направлении, обнаруженного посредством G-датчика 2b некоторого колеса, и углового положения RP этого колеса, определенного из значения подсчета импульсов скорости вращения колес.
Описания ссылок с номерами
[0008] 1 - колесо
2a - датчик давления (средство обнаружения давления воздуха в шинах)
2b - G-датчик (датчик ускорения)
3 - приемник
4a - секция вычисления угловых положений (средство обнаружения угловых положений)
4c - секция определения положений колес (средство определения положений колес)
4e - секция определения второго периода вращения (средство определения положения передачи)
4f - секция определения достоверности данных (средство определения положения передачи)
4g - секция определения первого периода вращения (средство определения положения передачи)
8 - датчик скорости вращения колес
11 - секция определения первого периода вращения (средство определения положения передачи).
Лучшие варианты осуществления изобретения
[0009] Далее поясняются варианты осуществления настоящего изобретения со ссылкой на примеры применения, проиллюстрированные на чертежах.
Пример 1 применения
Фиг.1 является схемой, иллюстрирующей конфигурацию устройства контроля давления воздуха в шинах в примере 1 применения. На этом чертеже буквы, присоединенные к окончаниям различных обозначений, задаются следующим образом: FL означает левое переднее колесо, FR означает правое переднее колесо, RL означает левое заднее колесо и RR означает правое заднее колесо. В следующем пояснении, если не требуется для конкретного пояснения, не приводится описание FL, FR, RL и RR.
Устройство контроля давления воздуха в шинах в примере 1 применения имеет датчики 2 TPMS (системы контроля давления в шинах), TPMS-контроллер (TPMSCU) 4, устройство 5 отображения и датчики 8 скорости вращения колес. TPMS-датчики 2 устанавливаются на колесах 1, соответственно, и приемник 3, TPMSCU 4, устройство 5 отображения и датчики 8 скорости вращения колес компонуются на стороне кузова транспортного средства.
[0010] TPMS-датчик 2 устанавливается в положении воздушного клапана (не показан на чертеже) каждой шины. Фиг.2 является схемой, иллюстрирующей конфигурацию TPMS-датчика 2. TPMS-датчик 2 содержит датчик 2a давления (средство обнаружения давления воздуха в шинах), датчик 2b ускорения (G-датчик), контроллер 2c датчика (CU датчика), передатчик 2d и батарею 2e таблеточного типа.
Здесь, датчик 2a давления обнаруживает давление воздуха [кПа] шины.
G-датчик 2b определяет ускорение в центробежном направлении [G], действующее на шину.
CU 2c датчика работает за счет питания, подаваемого из батареи 2e таблеточного типа, и TPMS-данные, содержащие информацию давления воздуха шины, обнаруженную посредством датчика 2a давления, и идентификатор (идентификационную информацию) датчика отправляется в качестве беспроводного сигнала из передатчика 2d. В примере 1 применения идентификаторы датчиков включают в себя 1-4.
[0011] CU 2c датчика сравнивает ускорение в центробежном направлении, обнаруженное посредством G-датчика 2b, с предварительно установленным порогом определения движения. Если ускорение в центробежном направлении ниже порога определения движения, выполняется определение, что транспортное средство останавливается, так что отключается передача TPMS-данных. С другой стороны, если ускорение в центробежном направлении превышает порог определения движения, выполняется определение, что транспортное средство движется, и TPMS-данные передаются в предписанное время.
Приемник 3 принимает беспроводные сигналы, выводимые из различных TPMS-датчиков 2, декодирует их и выводит результаты к TPMSCU 4.
[0012] TPMSCU 4 считывает различные TPMS-данные; из идентификатора датчика TPMS-данных и со ссылкой на соответствующую взаимосвязь между различными идентификаторами датчиков и положениями колес, сохраненную в энергонезависимой памяти 4d (см. фиг.3), TPMSCU определяет, какому положению колеса соответствуют TPMS-данные, и TPMSCU отображает давление воздуха шины, содержащееся в TPMS-данных, в качестве давления воздуха в соответствующем положении колеса на устройстве 5 отображения. Когда давление воздуха шины становится ниже нижнего порога, о снижении давления воздуха осуществляется уведомление посредством изменения цвета отображения, посредством мигания на устройстве отображения, посредством звука оповещения и т.п.
[0013] На основе импульсов скорости вращения колес из различных датчиков 8 скорости вращения колес, ABSCU 6 обнаруживает скорости вращения колес для колес 1, соответственно. Когда некоторое колесо имеет тенденцию к блокировке, ABS-актуатор (не показан на чертеже) включается, чтобы регулировать или поддерживать давление колесного цилиндра соответствующего колеса, чтобы подавлять тенденцию к блокировке. Таким образом, выполняется антиблокировочное управление тормозом. ABSCU 6 выводит значение подсчета импульсов скорости вращения колес к линии 7 связи CAN, как только прошел предписанный период времени (например, 20 мс).
Каждый датчик 8 скорости вращения колес является импульсным генератором, который генерирует импульсы скорости вращения колес для предписанного числа z (например, z=48) для каждого цикла вращения колеса 1. Датчик скорости вращения колес содержит ротор в виде шестеренки, вращающийся синхронно с колесом 1, и постоянный магнит и катушку, компонуемые на стороне кузова транспортного средства и обращенные к внешней периферии ротора. По мере того, как вращается ротор, вогнуто-выпуклая поверхность ротора проходит через магнитное поле, сформированное на периферии датчика 8 скорости вращения колес, так что варьируется плотность магнитного потока с тем, чтобы генерировать электродвижущую силу в катушке, и такое варьирование напряжения выводится в качестве сигнала импульса скорости вращения колес к ABSCU 6.
[0014] Как пояснено выше, на основе соответствующей взаимосвязи между идентификатором датчика и положением колеса, сохраненной в памяти 4d, TPMSCU 4 определяет то, какому колесу принадлежат принятые TPMS-данные. Следовательно, перестановка шин выполняется в момент, когда транспортное средство останавливается, соответствующая взаимосвязь между идентификатором датчика и положением колеса, сохраненная в памяти 4d, не согласована с фактической соответствующей взаимосвязью, и невозможно узнать, какому колесу принадлежат TPMS-данные. Здесь, "перестановка шин" означает операцию перестановки положений установки шин с тем, чтобы обеспечивать равномерный износ протектора для шин и, таким образом, продлевать срок службы (срок службы протектора). Например, для седана переставляются обычно передние/задние колеса, при этом положения левых/правых шин пересекаются.
Здесь, согласно примеру 1 применения, соответствующая взаимосвязь между идентификатором датчика и положением колеса после перестановки шин сохраняется посредством обновления памяти 4d для распознавания. Следовательно, может быть выполнена перестановка шин. В этом случае, для TPMS-датчиков 2, период передачи TPMS-данных изменяется; для TPMSCU 4, на основе периода передачи TPMS-данных и импульсов скорости вращения колес выполняется определение в отношении того, какому колесу принадлежит каждый из TPMS-датчиков 2.
[0015] Режим передачи в постоянном положении
Когда время определения остановки транспортного средства непосредственно перед началом движения транспортного средства превышает предписанное время (например, 15 мин), CU 2c датчика TPMS-датчика 2 определяет, что, возможно, выполнена перестановка шин.
Когда время определения остановки транспортного средства непосредственно перед началом движения транспортного средства меньше предписанного времени, CU 2c датчика выполняет "нормальный режим", в котором передаются TPMS-данные, как только прошел предписанный интервал (например, 1-минутный интервал). С другой стороны, когда время определения остановки транспортного средства превышает предписанное время, CU датчика выполняет "режим передачи в постоянном положении", в котором с интервалом (например, приблизительно 16 секунд), меньшим интервала передачи нормального режима, TPMS-данные передаются в предписанном угловом положении.
[0016] Режим передачи в постоянном положении выполняется до тех пор, пока число циклов передачи TPMS-данных не достигает предписанного числа циклов (например, 40 циклов). Когда число циклов передачи достигает предписанного числа циклов, режим передачи в постоянном положении возвращается к нормальному режиму. Когда выполнено определение, что транспортное средство останавливается до того, как число циклов передачи TPMS-данных достигает предписанного числа циклов, если время определения остановки транспортного средства меньше предписанного времени (15 мин), режим передачи в постоянном положении до остановки транспортного средства продолжается до тех пор, пока число циклов передачи не достигнет предписанного числа циклов; когда время определения остановки транспортного средства превышает предписанное время, отменяется продолжение режима передачи в постоянном положении до остановки транспортного средства, и начинается новый режим передачи в постоянном положении.
[0017] В режиме передачи в постоянном положении, на основе зависимого от гравитационного ускорения компонента ускорения в центробежном направлении, обнаруженного посредством G-датчика 2b, CU 2c датчика определяет привязку по времени передачи TPMS-данных в режиме передачи в постоянном положении. Ускорение в центробежном направлении, действующее на TPMS-датчик 2, варьируется согласно ускорению/замедлению колес 1, тем не менее, зависимый от гравитационного ускорения компонент всегда является установившимся; ускорение в центробежном направлении, действующее на TPMS-датчик, отображает форму сигнала с верхней точкой в +1 [G], нижней точкой в -1 [G] и средним положением в 90° между верхней точкой и нижней точкой 0 [G]. Иными словами, посредством контроля величины и направления компонента гравитационного ускорения, собственно ускорения в центробежном направлении, можно узнавать угловое положение TPMS-датчика 2. Как результат, например, поскольку TPMS-данные выводятся в пике зависимого от гравитационного ускорения компонента, TPMS-данные могут всегда выводиться в верхней точке.
[0018] CU 2c датчика имеет секцию 11 определения первого периода вращения. В режиме передачи в постоянном положении секция 11 определения первого периода вращения определяет период вращения (первый период вращения) самого колеса (колеса, в котором устанавливается соответствующий TPMS-датчик 2), когда передаются TPMS-данные. Первый период вращения означает интервал между временем передачи TPMS-данных и пиковым временем зависимого от гравитационного ускорения компонента ускорения в центробежном направлении, обнаруженного посредством G-датчика 2b, непосредственно перед передачей TPMS-данных.
CU 2c датчика имеет первый период вращения, определенный посредством секции 11 определения первого периода вращения, присоединенный к TPMS-данным, и передает их.
[0019] Автоматический режим движения
Когда истекшее время от выключения до включения переключателя зажигания превышает предписанное время (например, 15 мин), TPMSCU 4 определяет, что, возможно, выполнена перестановка шин.
Когда истекшее время от выключения до включения переключателя зажигания меньше предписанного времени, на основе информации давления воздуха в TPMS-данных, передаваемых из каждого TPMS-датчика 2, TPMSCU 4 выполняет "режим контроля", в котором контролируется давление воздуха шины каждого колеса 1. С другой стороны, когда истекшее время от выключения до включения переключателя зажигания превышает предписанное время, TPMSCU выполняет "автоматический режим движения", в котором определяется положение колеса каждого TPMS-датчика 2. В автоматическом режиме движения режим выполняется непрерывно до тех пор, пока положение колеса не определено для всех TPMS-датчиков 2, или до тех пор, пока предписанное накопленное время движения (например, 8 мин) не истекло от начала этого режима. Когда положение колеса определено для всех TPMS-датчиков 2 или когда предписанное накопленное время движения истекло, процесс переходит в режим контроля.
[0020] Даже в автоматическом режиме движения по-прежнему можно контролировать давление воздуха шин из информации давления воздуха, содержащейся в TPMS-данных. Следовательно, отображение давления воздуха и предупреждение относительно сниженного давления воздуха выполняются на основе соответствующей взаимосвязи между идентификатором датчика и положением колеса, в данный момент сохраненной в памяти 4d, во время автоматического режима движения.
В автоматическом режиме движения TPMSCU 4 имеет значение подсчета импульсов скорости вращения колес, вводимое из ABS-контроллера 6 (ABSCU) через линию 7 связи CAN к TPMSCU, и выполняет управление определением положений колес, представленное ниже по тексту.
[0021] Управление определением положений колес
Фиг.3 является блок-схемой, иллюстрирующей управление TPMSCU 4 для выполнения управления определением положений колес в примере 1 применения. TPMSCU 4 имеет секцию 4a вычисления угловых положений (средство обнаружения угловых положений), секцию 4b вычисления дисперсии, секцию 4c определения положений колес (средство определения положений колес), память 4d, секцию 4e определения второго периода вращения и секцию 4f определения достоверности данных (секцию определения).
Секция 4a вычисления угловых положений имеет TPMS-данные после декодирования вывода из приемника 3 и значения подсчета импульсов скорости вращения колес, выводимые из ABSCU 6 к линии 7 связи CAN, вводимые в секцию вычисления углового положения, и вычисляет угловое положение (число зубьев ротора) каждого колеса 1, когда угловое положение каждого TPMS-датчика 2 находится в верхней точке. Здесь, "число зубьев ротора" означает зубья ротора, которые подсчитываются посредством датчика 8 скорости вращения колес, и число зубьев ротора может быть определено посредством деления значения подсчета импульсов скорости вращения колес на значение подсчета 1 цикла вращения шины (= число зубьев 1 цикла z=48). В примере 1 применения, когда вводится значение подсчета импульсов скорости вращения колес первого цикла от начала автоматического режима движения, значение, полученное посредством прибавления 1 к остатку от операции деления значения подсчета на число зубьев 1 цикла, принимается в качестве опорного числа зубьев; во втором цикле и после этого число зубьев определяется на основе подсчитанного числа импульсов скорости вращения колес (текущее значение подсчета - значение подсчета первого цикла) из опорного числа зубьев.
[0022] Фиг.4 является схемой, иллюстрирующей способ для вычисления углового положения каждого колеса 1.
На фиг.4 t1 представляет время, когда вводится значение подсчета импульсов скорости вращения колес; t2 представляет время, когда угловое положение TPMS-датчика 2 достигает верхней точки; t3 представляет время, когда TPMS-датчик 2 фактически начинает передачу TPMS-данных; t4 представляет время, когда завершается прием TPMS-данных посредством TPMSCU 4; и t5 представляет время, когда вводится значение подсчета импульсов скорости вращения колес. В этом случае t1, t4 и t5 могут фактически измеряться; t3 может быть вычислено посредством вычитания длины данных (номинального значения, например, приблизительно 10 мс) TPMS-данных из t4; и t2 может быть вычислено посредством вычитания запаздывания во времени при передаче (t2 может быть определено заранее посредством эксперимента и т.п.) из t3.
Следовательно, допустим, что число зубьев в t1 составляет zt1, число зубьев в t2 составляет zt2, и число зубьев в t5 составляет zt5, и имеем:

Поскольку:

Число зубьев zt2, когда угловое положение TPMS-датчика 2 находится в верхней точке, становится следующим:

[0023] Секция 4b вычисления дисперсии работает следующим образом: из угловых положений колес 1, вычисленных посредством секции 4a вычисления угловых положений, угловые положения колес 1, определенные как достоверные данные посредством секции 4f определения достоверности данных, накапливаются для идентификаторов датчиков, соответственно, и рассматриваются в качестве данных угловых положений; степень дисперсии данных угловых положений для каждого идентификатора датчика вычисляется в качестве значения дисперсионных характеристик. Вычисление значения дисперсионных характеристик выполняется каждый раз, когда угловое положение соответствующего идентификатора датчика вычисляется посредством секции 4a вычисления угловых положений.
Фиг.5 является схемой, иллюстрирующей способ для вычисления значения дисперсионных характеристик. Согласно примеру 1 применения, рассматривается единичный круг (круг с радиусом 1) с началом координат (0, 0) на двумерной плоскости, и угловое положение θ [градусы] (=360 × число зубьев ротора/48) каждого колеса 1 преобразуется в координаты (cos θ, sin θ) на окружности единичного круга. Иными словами, угловое положение каждого колеса 1 вычисляется следующим образом: пусть вектор, имеющий начало координат (0, 0), является начальной точкой, а координаты (cos θ, sin θ) являются концевым участком и имеют длину l, определяются средние векторы (ave_cos θ, ave_sin θ) векторов данных идентичных угловых положений, и вычисляется скалярная величина среднего вектора в качестве значения X дисперсионных характеристик данных угловых положений.

Следовательно, допустим, что число циклов приема TPMS-данных идентичного идентификатора датчика составляет n (n является положительным целым числом), средние векторы (ave_cos θ, ave_sin θ) следующие:

Значение X дисперсионных характеристик может представляться следующим образом:

[0024] Секция 4c определения положений колес работает следующим образом: сравниваются значения X дисперсионных характеристик различных данных угловых положений идентичного идентификатора датчика, вычисленные посредством секции 4b вычисления дисперсии; когда наибольшее значение из значений X дисперсионных характеристик превышает первый порог (например, 0,57), в то время как оставшиеся 3 значения X дисперсионных характеристик меньше второго порога (например, 0,37), выполняется определение, что положение колеса из данных угловых положений, соответствующих значению X дисперсионных характеристик с наибольшим значением, т.е. положение колеса датчика 8 скорости вращения колес, который обнаружил соответствующие данные угловых положений, является положением колеса TPMS-датчика 2, соответствующего идентификатору датчика данных угловых положений. Это определение выполняется для всех идентификаторов датчиков; определяется соответствующая взаимосвязь между идентификатором датчика и положением колеса, и сохранение в памяти 4d обновляется для регистрации.
[0025] На основе TPMS-данных после декодирования и значения подсчета импульсов скорости вращения колес секция 4e определения второго периода вращения определяет период вращения (второй период вращения) самого колеса (колеса, в котором устанавливается соответствующий TPMS-датчик 2), когда передаются TPMS-данные. Второй период вращения является средним значением периодов вращения различных колес 1.
Секция 4f определения достоверности данных сравнивает первый период вращения и второй период вращения, содержащиеся в TPMS-данных, и определяет то, являются ли угловые положения колес 1, обнаруженные, когда передаются TPMS-данные, достоверными данными или недостоверными данными. В примере 1 применения, когда взаимосвязь между первым периодом Tp вращения и вторым периодом Ta вращения удовлетворяет следующей приведенной формуле (1), данные определяются как достоверные данные; если эта взаимосвязь не удовлетворяется, данные определяются как недостоверные данные.

Здесь, α имеет предписанное значение (например, 0,1). Тем не менее, α также может быть переменной, соответствующей состоянию транспортного средства, а также времени задержки в связи и операции вычисления.
Секция 11 определения первого периода вращения, секция 4e определения второго периода вращения и секция 4f определения достоверности данных формируют средство определения положения передачи, которое определяет то, передается или нет соответствующий беспроводной сигнал в предварительно установленном (предписанном) угловом положении (верхней точке).
[0026] Процесс управления определением положения колеса
Фиг.6 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса управления определением положения колеса согласно примеру 1 применения. Далее поясняются различные этапы операции. В следующем пояснении предполагается случай идентификатора датчика = 1. Тем не менее, для других идентификаторов (идентификатор = 2, 3, 4) процесс управления определением положения колеса также выполняется параллельно.
На этапе S1 секция 4a вычисления углового положения принимает TPMS-данные с идентификатором датчика = 1.
На этапе S2 секция 4a вычисления углового положения вычисляет угловое положение каждого колеса 1.
[0027] На этапе S3 секция 4e определения второго периода вращения определяет второй период вращения.
На этапе S4 секция 4f определения достоверности данных определяет то, являются или нет угловые положения различных колес 1, вычисленные на этапе S2, достоверными данными. Когда результатом определения является "Да", операция переходит к этапу S5. Если "Нет", операция возвращается к этапу S1.
[0028] На этапе S5 секция 4b вычисления дисперсии вычисляет значения X дисперсионных характеристик данных угловых положений колес 1.
На этапе S6 выполняется определение в отношении того, принимаются или нет TPMS-данные с идентификатором датчика, равным 1, в течение предписанного числа циклов (например, 10 циклов) или больше. Если результатом определения является "Да", операция переходит к этапу S7. Если результатом определения является "Нет", операция возвращается к этапу S1.
На этапе S7 секция 4c определения положений колес определяет то, превышает или нет наибольшее значение значения дисперсионных характеристик первый порог в 0,57, и меньше или нет значение из оставшихся значений дисперсионных характеристик второго порога в 0,37. Если результатом определения является "Да", процесс переходит к этапу S8; если результатом определения является "Нет", процесс переходит к этапу S9.
[0029] На этапе S8 секция 4c определения положений колес определяет положение колеса из данных угловых положений, соответствующих наибольшему значению дисперсионных характеристик, в качестве положения колеса для соответствующего идентификатора датчика. Затем, завершается автоматический режим движения.
На этапе S9 секция 4c определения положений колес определяет то, истекло или нет предписанное накопленное время движения (например, 8 мин) от начала автоматического режима движения. Если результатом определения является "Да", автоматический режим движения завершается. Если результатом определения является "Нет", операция возвращается к этапу S1.
Когда секция 4c определения положений колес может определять положения колес для всех идентификаторов датчиков в предписанное накопленное время движения, соответствующая взаимосвязь между идентификатором датчика и положением колеса обновляется и сохраняется в памяти 4d для регистрации. С другой стороны, когда невозможно определять положение колеса для всех идентификаторов датчиков в предписанное накопленное время движения, продолжает использоваться соответствующая взаимосвязь между идентификаторами датчиков и различными положениями колес, в данный момент сохраненная в памяти 4d.
[0030] Далее поясняется процесс.
Операция определения положений колес посредством степени дисперсии данных угловых положений
TPMS-датчик 2 работает следующим образом: когда время определения остановки транспортного средства непосредственно перед началом движения транспортного средства составляет 15 мин или больше, выполняется определение в отношении того, что имеется вероятность того, что выполнена перестановка шин, и операция переходит из нормального режима в режим передачи в постоянном положении. В режиме передачи в постоянном положении, после того как 16 секунд истекают со времени передачи последнего цикла и положение собственного вращения достигает верхней точки, различные TPMS-датчики 2 передают TPMS-данные.
[0031] С другой стороны, когда истекшее время от выключения до включения переключателя зажигания составляет 15 мин или больше, TPMSCU 4 переходит из режима контроля в автоматический режим движения. В автоматическом режиме движения каждый раз, когда TPMS-данные принимаются из TPMS-датчиков 2, TPMSCU 4 вычисляет угловое положение (число зубьев ротора) каждого колеса 1, когда угловое положение TPMS-датчика 2 достигает верхней точки. Это многократно выполняется в течение 10 или более циклов, и накапливаются полученные данные угловых положений. Положение колеса, соответствующее данным угловых положений, имеющим наименьшую степень дисперсии из различных данных угловых положений, рассматривается в качестве положения колеса соответствующего TPMS-датчика 2.
[0032] Когда транспортное средство движется, скорости вращения колес 1 становятся отличающимися вследствие разности между наружными колесами и внутренними колесами, блокировки и скольжения колес 1 и разности давления воздуха шин. Даже когда транспортное средство движется прямо вперед, поскольку водитель по-прежнему может проводить мгновенные корректировки в руле, и существует некоторое отличие поверхности дороги на левой/правой сторонах, разность скорости вращения по-прежнему растет между передними/задними колесами 1FL и 1FR и между левыми/правыми колесами 1RL и 1RR. Иными словами, в то время как существует разность, соответствующая движению транспортного средства, поскольку TPMS-датчик 2 и датчик 8 скорости вращения колес (зубья ротора) вращаются совместно, для периода вывода некоторого TPMS-датчика 2, период вывода датчика 8 скорости вращения колес идентичного колеса поддерживается синхронизированным (согласованным) независимо от расстояния пробега и состояния движения.
[0033] Следовательно, посредством определения степени дисперсии данных угловых положений колес 1 относительно периода передачи TPMS-данных можно выполнять высокоточное определение относительно положений колес для различных TPMS-датчиков 2.
Фиг.7 иллюстрирует взаимосвязь между угловыми положениями (числом зубьев роторов) колес 1FL, 1FR, 1RL и 1RR, когда угловое положение TPMS-датчика 2FL левого переднего колеса 1FL достигает верхней точки, и числом циклов приема TPMS-данных. Здесь, (a) соответствует датчику 8FL скорости вращения колес левого переднего колеса 1FL, (b) соответствует датчику 8FR скорости вращения колес правого переднего колеса 1FR, (c) соответствует датчику 8RL скорости вращения колес левого заднего колеса 1RL и (d) соответствует датчику 8RR скорости вращения колес правого заднего колеса 1RR.
Как можно видеть из фиг.7, в то время как степень дисперсии является высокой для положения колеса (числа зубьев), полученного из датчиков 8FR, 8RL и 8RR скорости вращения колес оставшихся колес (правого переднего колеса 1FR, левого заднего колеса 1RL и правого заднего колеса 1RR), степень дисперсии положения колеса, полученного из датчика 8FL скорости вращения колес самого колеса (левого переднего колеса 1FL), является наименьшей, так что период вывода TPMS-датчика 2FL и период вывода датчика 8FL скорости вращения колес практически синхронизированы друг с другом.
[0034] В качестве одного из традиционных устройств контроля давления воздуха в шинах датчик наклона компонуется для каждого TPMS-датчика и приспосабливается взаимосвязь между положением колеса TPMS-датчика и углом наклона, чтобы определять положение колеса TPMS-датчика. Для этого типа устройства контроля давления воздуха в шинах в предшествующем уровне техники, согласно движению транспортного средства, возникает разность скорости вращения между 4 колесами, так что варьируется соответствующая взаимосвязь между положением колеса TPMS-датчика и углом наклона. Как результат, невозможно выполнять высокоточное определение относительно положения колеса каждого TPMS-датчика.
В качестве другого традиционного устройства контроля давления воздуха в шинах, число приемников, идентичное числу приемников TPMS-датчиков, компонуется рядом с датчиками, соответственно; на основе интенсивности электромагнитной волны принимаемых беспроводных сигналов определяется положение колеса каждого TPMS-датчика. Здесь, необходимо учитывать вывод датчика, дисперсию чувствительности приемника и эффект от комплекта антенн для схемы размещения приемников, и окружение приема и схема размещения определяют производительность. Помимо этого, должны компоноваться 4 приемника. Следовательно, затраты являются более высокими.
С другой стороны, для устройства контроля давления воздуха в шинах в примере 1 применения настоящего изобретения положение колеса каждого TPMS-датчика 2 определяется без использования интенсивности электромагнитной волны, так что можно определять положение колеса каждого TPMS-датчика 2 независимо от окружения приема и схемы размещения. Помимо этого, достаточно одного приемника 3, который обеспечивает сокращение затрат.
[0035] Помимо этого, согласно примеру 1 применения, в TPMS-датчике 2 тот факт, что угловое положение TPMS-датчика 2 находится в верхней точке, может быть вычислен из зависимого от гравитационного ускорения компонента ускорения в центробежном направлении посредством G-датчика 2b. Здесь, G-датчик 2b уже используется в существующих устройствах контроля давления воздуха в шинах при определении остановки или движения транспортных средств. Следовательно, существующие TPMS-датчики могут приспосабливаться как есть, так что можно сокращать расходы, которые в противном случае требуются для добавления новых датчиков в качестве TPMS-датчиков 2.
Помимо этого, согласно примеру 1 применения, в TPMSCU 4 угловое положение каждого колеса 1 вычисляется из импульсов скорости вращения колес датчика 8 скорости вращения колес. Здесь, ABS-блок монтируется почти на всех транспортных средствах, и поскольку датчики 8 скорости вращения колес являются обязательными частями в ABS-блоках, нет необходимости добавлять новые датчики на стороне транспортного средства. Таким образом, могут сокращаться затраты.
[0036] Операция при определении степени дисперсии из значения дисперсионных характеристик
Поскольку угловое положение колеса 1 представляет собой данные угла с периодичностью, степень дисперсии углового положения не может быть определена с использованием общей дисперсионной формулы, заданной посредством среднего "квадрата разности со средним".
Здесь, в примере 1 применения, секция 4b вычисления дисперсии работает следующим образом: угловое положение θ каждого колеса 1, полученное из каждого датчика 8 скорости вращения колес, преобразуется в координаты (cos θ, sin θ) окружности единичного круга, имеющего начало координат (0, 0) в центре. Координаты (cos θ, sin θ) рассматриваются в качестве векторов, определяются средние векторы (ave_cos θ, ave_sin θ) различных векторов идентичных данных угловых положений и вычисляется скалярная величина среднего вектора в качестве значения X дисперсионных характеристик. Как результат, можно исключать периодичность при определении степени дисперсии углового положения.
[0037] Процесс определения достоверных данных
Посредством CU 2c датчика TPMS-датчика 2, в режиме передачи в постоянном положении, на основе зависимого от гравитационного ускорения компонента ускорения в центробежном направлении, обнаруженного посредством G-датчика, обнаруживается угловое положение TPMS-датчика 2, и TPMS-данные передаются в пике зависимого от гравитационного ускорения компонента. Таким образом, TPMS-данные всегда передаются в предписанном угловом положении (верхней точке). Здесь, ускорение в центробежном направлении, действующее на TPMS-датчик 2, варьируется согласно ускорению/замедлению колеса 1. Тем не менее, зависимый от гравитационного ускорения компонент продолжает иллюстрировать форму сигнала с установившейся шириной (-1 к 1 [G]); зависимый от гравитационного ускорения компонент варьируется в намного меньшем периоде относительно связывания в ускорении ускорения в центробежном направлении вместе с ускорением/замедлением транспортного средства, так что может быть легко обнаружено варьирование зависимого от гравитационного ускорения компонента из ускорения в центробежном направлении.
[0038] Тем не менее, когда шумы, вызываемые вкладом поверхности дороги и т.д., содержатся в обнаруженном значении посредством G-датчика 2b, значение зависимого от гравитационного ускорения компонента ускорения в центробежном направлении становится искаженным; когда пик (1 [G]) достигается в угловом положении до того, как TPMS-датчик 2 достигает верхней точки, или в угловом положении после того, как TPMS-датчик выходит за пределы верхней точки, передатчик 2d выполняет ошибочное определение для углового положения, и TPMS-данные, таким образом, передаются в угловом положении, отличающемся от верхней точки.
На основе привязки по времени приема TPMS-данных и значения подсчета импульсов скорости вращения колес в этом случае секция 4a вычисления угловых положений TPMSCU 4 вычисляет угловое положение каждого колеса 1, когда угловое положение TPMS-датчика 2 достигает верхней точки. Следовательно, секция 4a вычисления угловых положений вычисляет угловое положение каждого колеса 1 с TPMS-данными, передаваемыми в угловом положении, отличном от верхней точки, в качестве TPMS-данных, передаваемых в верхней точке, и секция 4b вычисления дисперсии вычисляет значение дисперсионных характеристик каждого колеса 1, имеющего угловое положение, содержащееся в данных угловых положений. Как результат, ошибочные данные угловых положений содержатся в данных угловых положений, и генерирование разности между наибольшим значением каждого значения X дисперсионных характеристик и оставшимися значениями становится задержанным; тем самым задерживается определение положения колеса.
[0039] С другой стороны, согласно примеру 1 применения настоящего изобретения, секция 4f определения достоверности данных работает следующим образом: когда абсолютное значение разности между первым периодом Tp вращения и вторым периодом Ta вращения равно или меньше предписанного значения α, выполняется определение, что угловое положение колеса 1, обнаруженное, когда передаются TPMS-данные, представляет собой достоверные данные; с другой стороны, когда абсолютное значение разности между первым периодом Tp вращения и вторым периодом Ta вращения превышает предписанное значение α, выполняется определение, что угловое положение колеса 1, обнаруженное, когда передаются TPMS-данные, представляет собой недостоверные данные.
На основе данных угловых положений, которые накапливают только угловое положение каждого колеса 1, определенных как достоверные данные, секция 4b вычисления дисперсии вычисляет значение X дисперсионных характеристик каждого колеса 1.
Иными словами, посредством определения первого периода Tp вращения определяется привязка по времени для фактической передачи TPMS-данных. Следовательно, когда два периода Tp и Ta вращения сравниваются друг с другом и их разность является небольшой (абсолютное значение разности равно или меньше предписанного значения α), можно определять то, что соответствующие TPMS-данные передаются в предписанном угловом положении; с другой стороны, когда разность является большой (абсолютное значение разности превышает предписанное значение α), можно определять то, что соответствующие TPMS-данные не передаются в предписанном угловом положении.
[0040] Фиг.8 является схемой, иллюстрирующей варьирование во времени зависимого от гравитационного ускорения компонента Gg ускорения в центробежном направлении, обнаруженного посредством G-датчика 2b некоторого колеса, и углового положения RP колеса, определенного из значения подсчета импульсов скорости вращения колес.
Первый период Tp вращения является интервалом между временем передачи TPMS-данных и временем, соответствующим пику зависимого от гравитационного ускорения компонента ускорения в центробежном направлении, обнаруженного посредством G-датчика 2b, непосредственно перед временем, описанным выше. Следовательно, как показано на фиг.8(a), когда передаются TPMS-данные, когда TPMS-датчик 2 находится в верхней точке, первый период Tp вращения практически согласован с периодом вращения самого колеса. Здесь, второй период Ta вращения определяется в качестве периода вращения самого колеса на основе импульсов скорости вращения колес, и второй период вращения может рассматриваться в качестве периода вращения самого колеса. Иными словами, как показано на фиг.8(a), когда абсолютное значение разности между первым периодом Tp вращения и вторым периодом Ta вращения равно или меньше предписанного значения α, выполняется определение, что TPMS-данные передаются в предписанном угловом положении (верхней точке).
[0041] С другой стороны, как показано на фиг.8(b), в случае, когда зависимый от гравитационного ускорения компонент Gg достигает пика (1 [G]) в положении до того, как TPMS-датчик 2 достигает предписанного углового положения вследствие шума, и когда TPMS-данные передаются в соответствующем положении, первый период Tp вращения меньше второго периода Ta вращения (≈периоду вращения самого колеса), и разность между этими двумя периодами становится большей. Иными словами, как показано на фиг.8(b), когда абсолютное значение разности между первым периодом Tp вращения и вторым периодом Ta вращения превышает предписанное значение α, выполняется определение, что TPMS-данные не передаются в предписанном угловом положении.
[0042] Как пояснено выше, при условии, что абсолютное значение разности между первым периодом Tp вращения и вторым периодом Ta вращения меньше предписанного значения α, выполняется определение, что угловые положения колес 1, обнаруженные, когда передаются TPMS-данные, представляют собой достоверные данные; посредством вычисления значений X дисперсионных характеристик колес 1 с использованием угловых положений колес 1, определенных как достоверные данные, можно предотвращать вычисление значений X дисперсионных характеристик с использованием данных с ошибками, и соответствующая взаимосвязь между идентификатором датчика и положением колеса может быстро быть определена с высокой степенью точности.
[0043] Далее поясняются преимущества.
Для устройства контроля давления воздуха в шинах в примере 1 применения могут быть реализованы следующие преимущества.
(1) В устройстве контроля давления воздуха в шинах, которое контролирует давление воздуха каждой шины, присутствуют следующие части: датчик 2a давления, который обнаруживает давление воздуха шины и который устанавливается на шине каждого колеса 1; датчик 2a давления для обнаружения давления воздуха каждой шины; G-датчик 2b, который обнаруживает ускорение в центробежном направлении, действующее на шину, и который устанавливается на шине каждого колеса 1; передатчик 2d, который обнаруживает угловое положение колеса на основе обнаруженного значения G-датчика 2b и передает давление воздуха в предписанном угловом положении вместе с идентификатором датчика в качестве TPMS-данных для каждого колеса; приемник 3, который компонуется на стороне кузова транспортного средства и принимает TPMS-данные; датчик 8 скорости вращения колес, который компонуется на стороне кузова транспортного средства, соответствующей каждому колесу 1, и обнаруживает скорость вращения соответствующего колеса; секция 4a вычисления угловых положений, которая обнаруживает угловое положение каждого колеса 1, когда передаются TPMS-данные, содержащие идентификатор датчика; средство определения положения передачи (секция 11 определения первого периода вращения, секция 4e определения второго периода вращения и секция 4f определения достоверности данных), которое включает в себя секцию 11 первого периода вращения, которая определяет в качестве первого периода Tp вращения период вращения колеса, соответствующий идентификатору датчика, когда передаются TPMS-данные, секцию 4e определения второго периода вращения, которая определяет в качестве второго периода Ta вращения период вращения колеса, соответствующий идентификатору датчика, когда передаются TPMS-данные, на основе обнаруженного значения датчика 8 скорости вращения колес, и секцию 4f определения достоверности данных, которая определяет факт передачи TPMS-данных в предписанном угловом положении, когда абсолютное значение разности между первым периодом Tp вращения и вторым периодом Ta вращения меньше предписанного значения α; и секция 4c определения положений колес, которая определяет положение колеса передатчика, соответствующего идентификатору датчика, на основе углового положения каждого колеса, когда передаются TPMS-данные, в качестве передачи в предписанном угловом положении.
Как результат, можно быстро определять соответствующую взаимосвязь между идентификатором датчика и положением колеса с высокой степенью точности.
[0044] (2) Секция 11 определения первого периода вращения компонуется на стороне колеса 1, и передатчик 2d имеет первый период Tp вращения, присоединенный к TPMS-данным для передачи.
Как результат, существующие G-датчики 2b, компонуемые на колесах 1, приспосабливаются с возможностью определять первый период Tp вращения. Следовательно, можно сокращать расходы, которые в противном случае вызываются вследствие добавления новых датчиков на колеса.
[0045] Пример 2 применения
Пример 2 применения отличается от примера 1 применения тем, что секция определения первого периода вращения компонуется на стороне кузова транспортного средства. Далее поясняются только признаки, отличающиеся от примера 1 применения.
Режим передачи в постоянном положении
CU 2c датчика TPMS-датчика 2 передает TPMS-данные один раз каждый предписанный интервал (например, 16 секунд), и идентичные TPMS-данные передаются в 3 рабочих циклах каждый раз, когда угловое положение TPMS-датчика 2 становится верхней точкой, т.е. каждый раз, когда зависимый от гравитационного ускорения компонент ускорения в центробежном направлении, обнаруженного посредством G-датчика 2b, достигает пика (1 [G]). Далее, в порядке передачи 3 TPMS-данных, TPMS-данные представляют собой первый кадр TPMS-данных, второй кадр TPMS-данных и третий кадр TPMS-данных.
[0046] Управление определением положения колеса
Фиг.9 является блок-схемой, иллюстрирующей управление TPMSCU 4 для выполнения управления определением положения колеса в примере 2 применения. Пример 2 применения отличается от примера 1 применения тем, что секция 4g определения первого периода вращения (средство определения положения передачи) компонуется в TPMSCU 4. Следовательно, конфигурация TPMS-датчика 2 в примере 2 применения отличается от конфигурации примера 1 применения, показанного на фиг.2, тем, что не компонуются секции 11 определения первого периода вращения.
Секция 4g определения первого периода вращения вычисляет время от передачи первого кадра TPMS-данных до передачи второго кадра TPMS-данных в качестве первого периода Tp1 вращения, и время от передачи второго кадра TPMS-данных до третьего кадра TPMS-данных в качестве первого периода Tp2 вращения.
[0047] Далее поясняется операция.
Операция определения достоверных данных
Фиг.10 является схемой, иллюстрирующей варьирование во времени зависимого от гравитационного ускорения компонента Gg ускорения в центробежном направлении, обнаруженного посредством G-датчика 2b некоторого колеса, и углового положения RP колеса, описанного выше по тексту, определенного из значения подсчета импульсов скорости вращения колес.
Первые периоды Tp1 и Tp2 вращения являются интервалами передачи кадров TPMS-данных. Следовательно, как показано на фиг.10(a), когда передаются кадры TPMS-данных, когда TPMS-датчик 2 находится в верхней точке для всех кадров, оба из первых периодов Tp1 и Tp2 вращения практически согласованы со вторыми периодами Ta1 и Ta2 вращения. Иными словами, как показано на фиг.10(a), когда абсолютное значение разности между первым периодом Tp1 вращения и вторым периодом Ta1 вращения и абсолютное значение разности между первым периодом Tp2 вращения и вторым периодом Ta2 вращения меньше предписанного значения α, можно определять, что все кадры TPMS-данных передаются в предписанном угловом положении (верхней точке). Следовательно, может быть эффективно определено угловое положение каждого колеса 1, обнаруживаемое, когда все кадры TPMS-данных передаются в качестве достоверных данных.
[0048] С другой стороны, как показано на фиг.10(b), когда зависимый от гравитационного ускорения компонент Gg в положении до того, как TPMS-датчик 2 переходит к предписанному угловому положению вследствие шума после передачи второго кадра TPMS-данных, достигает пика (1 [G]) и когда третий кадр TPMS-данных передается в положении, описанном выше по тексту, первый период Tp2 вращения меньше второго периода Ta2 вращения, и разность между ними возрастает. Иными словами, как показано на фиг.10(b), когда абсолютное значение разности между первым периодом Tp1 вращения и вторым периодом Ta1 вращения равно или меньше предписанного значения α, и абсолютное значение разности между первым периодом Tp2 вращения и вторым периодом Ta2 вращения превышает предписанное значение α, выполняется определение, что третий кадр TPMS-данных не передается в предписанном угловом положении. Следовательно, угловое положение каждого колеса 1, обнаруживаемое, когда передаются первый кадр и второй кадр TPMS-данных, определяется как достоверные данные, и угловое положение каждого колеса 1, обнаруживаемое, когда передается третий кадр TPMS-данных, определяется как недостоверные данные.
[0049] Кроме того, как показано на фиг.10(c), когда зависимый от гравитационного ускорения компонент Gg достигает пика (1 [G]), когда TPMS-датчик 2 достигает положения перед предписанным угловым положением посредством шума после передачи первого кадра TPMS-данных и когда второй кадр TPMS-данных передается в положении, первый период Tp1 вращения меньше второго периода Ta1 вращения, и первый период Tp2 вращения превышает второй период Ta2 вращения. Здесь, на практике, третий кадр TPMS-данных передается в предписанном угловом положении, причем это не может быть определено посредством TPMSCU 4. Следовательно, как показано на фиг.10(c), когда абсолютное значение разности между первым периодом Tp1 вращения и вторым периодом Ta1 вращения и абсолютное значение разности между первым периодом Tp2 вращения и вторым периодом Ta2 вращения превышают предписанное значение α, угловое положение каждого колеса 1, обнаруживаемое, когда передаются все кадры TPMS-данных, определяется как недостоверные данные.
[0050] Далее поясняются преимущества.
Для устройства контроля давления воздуха в шинах в примере 2 применения, помимо преимущества (1) примера 1 применения, может демонстрироваться следующее преимущество.
(3) Секция 4g определения первого периода вращения компонуется на стороне кузова транспортного средства.
Как результат, можно снижать нагрузку по вычислению на стороне TPMS-датчика 2, что тем самым предоставляет возможность сокращения потребления энергии.
[0051] Другие примеры вариантов применения
Хотя описаны некоторые варианты осуществления, эти варианты осуществления представлены только в качестве примера, и они не имеют намерение ограничивать объем изобретения. Фактически, новый вариант осуществления, описанный в данном документе, может быть осуществлен во множестве других форм; кроме того, различные пропуски, подстановки и изменения в форме варианта осуществления, описанного в данном документе, могут осуществляться без отступления от сущности изобретения. Прилагаемая формула изобретения и ее эквиваленты имеют намерение охватывать такие формы и модификации, как попадающие в пределы объема и сущности изобретения.
Реферат
Изобретение относится к автомобильной промышленности. Когда разность между первым периодом Tp вращения, определенным на основе обнаружения посредством G-датчика 2b, и вторым периодом Ta вращения, определенным на основе обнаруженного значения датчика 8 скорости вращения колес, равна или меньше предписанного значения α, угловое положение каждого колеса, соответствующего беспроводному сигналу, передаваемому в предписанном угловом положении, приспосабливается при определении положения колеса. Когда разность превышает предписанное значение α, угловое положение каждого колеса, соответствующего беспроводному сигналу, передаваемому в угловом положении, отличающемся от углового положения, не используется при определении положения колеса. Технический результат - повышение точности определения положения каждого колеса. 2 з.п. ф-лы, 10 ил.
Формула
- средство обнаружения давления воздуха в шинах, установленное на шине каждого колеса, чтобы обнаруживать давление воздуха, действующее на шину;
- датчик ускорения, установленный на шине каждого колеса, чтобы обнаруживать ускорение в предписанном направлении, действующем на шину;
- передатчик, скомпонованный на каждом колесе, чтобы обнаруживать угловое положение колеса на основе обнаруженного значения датчика ускорения и передавать давление воздуха в предписанном угловом положении вместе с уникальным идентификатором информации для каждого передатчика в качестве беспроводного сигнала;
- приемник, скомпонованный на стороне кузова транспортного средства, чтобы принимать беспроводной сигнал;
- датчик скорости вращения колес, который скомпонован на стороне транспортного средства, соответствующей каждому колесу, и который обнаруживает скорость вращения соответствующего колеса;
- средство обнаружения угловых положений, скомпонованное на стороне транспортного средства и которое обнаруживает угловое положение каждого колеса, когда передается беспроводной сигнал, содержащий некоторую идентификационную информацию;
- средство определения положений передачи, содержащее часть определения первого периода вращения, которая определяет период вращения колеса для колеса, соответствующего идентификационной информации, когда передается беспроводной сигнал, на основе обнаруженного значения датчика ускорения, описанного выше, в качестве первого периода вращения, часть определения второго периода вращения, которая определяет период вращения колеса, соответствующего идентификационной информации, когда передается беспроводной сигнал, в качестве второго периода вращения, на основе обнаруженного значения датчика скорости вращения колес, и секцию определения, которая передает беспроводной сигнал в предписанном угловом положении, когда разность между первым периодом вращения и вторым периодом вращения равна или меньше предписанного значения; и
- средство определения положений колес, которое определяет положение колеса для передатчика, соответствующего идентификационной информации, на основе углового положения каждого колеса, когда передается беспроводной сигнал, который определяет, что передача выполняется в предписанном угловом положении.
- секция определения первого периода вращения скомпонована на стороне каждого колеса; и
- передатчик имеет первый период вращения, присоединенный к беспроводному сигналу и передаваемый.
- секция определения первого периода вращения скомпонована на стороне кузова транспортного средства.
Комментарии