Устройство контроля давления в шине - RU2549577C1
Код документа: RU2549577C1
Чертежи

Описание
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству контроля давления в шине для контроля давления каждой шины транспортного средства.
Уровень техники
[0002] Традиционно, известно устройство контроля давления воздуха в шине для определения того, в каком положении колеса (положении установки шины относительно транспортного средства) располагается передатчик датчика давления шины, установленного на шине каждого колеса (патентный документ 1, например).
Документ предшествующего уровня техники
Патентный документ
[0003] Патентный документ 1: JP 2007-245982 А: Сущность изобретения.
Проблема, которая должна быть решена изобретением
[0004] Во время движения транспортного средства передатчик вращается вместе с колесом, и может возникать различие в скоростях вращения между соответствующими колесами.
Следовательно, для того, чтобы точно определять положение колеса передатчика, предпочтительно точно обнаруживать угловое положение (угол поворота), в котором передатчик каждого колеса выполняет передачу, на стороне кузова транспортного средства. Однако, если информация об угловом положении колеса, обнаруженная на стороне кузова транспортного средства, вводится дискретно (спорадически с предварительно определенным интервалом времени), может быть затруднительным обнаруживать точно угловое положение на стороне кузова транспортного средства и возможно ухудшение в точности обнаружения передатчика. Целью настоящего изобретения является предоставление устройства контроля давления в шине, которое может определять более точно положение колеса передатчика.
Механизм для решения проблемы
Для того, чтобы достичь вышеописанной цели, согласно изобретению по п. 1, угловое положение во время передачи из передатчика оценивается на основе угловых положений колеса, которые вводятся непосредственно перед началом приема беспроводного сигнала от передатчика и непосредственно после завершения приема, соответственно, введенных через линию связи времени ввода углового положения колеса и времени начала приема или времени завершения приема.
Преимущества изобретения
[0006] Соответственно, поскольку возможно более точно обнаруживать угловое положение передатчика каждого колеса при передаче от передатчика, положение колеса передатчика может быть обнаружено более точно.
Краткое описание чертежей
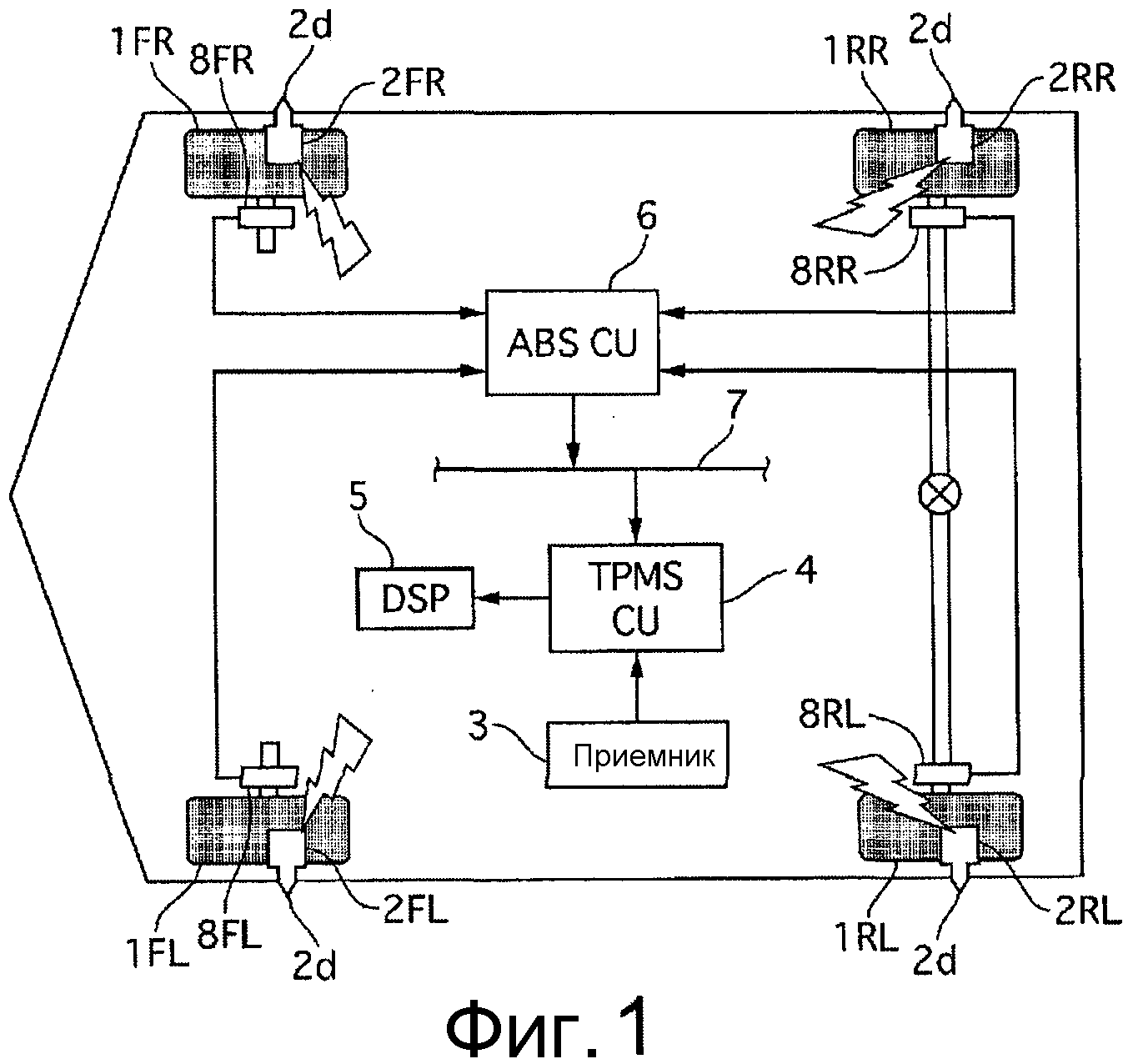
[0007] Фиг. 1 - конфигурационная схема, иллюстрирующая конфигурацию устройства контроля давления воздуха в шине в первом варианте осуществления;
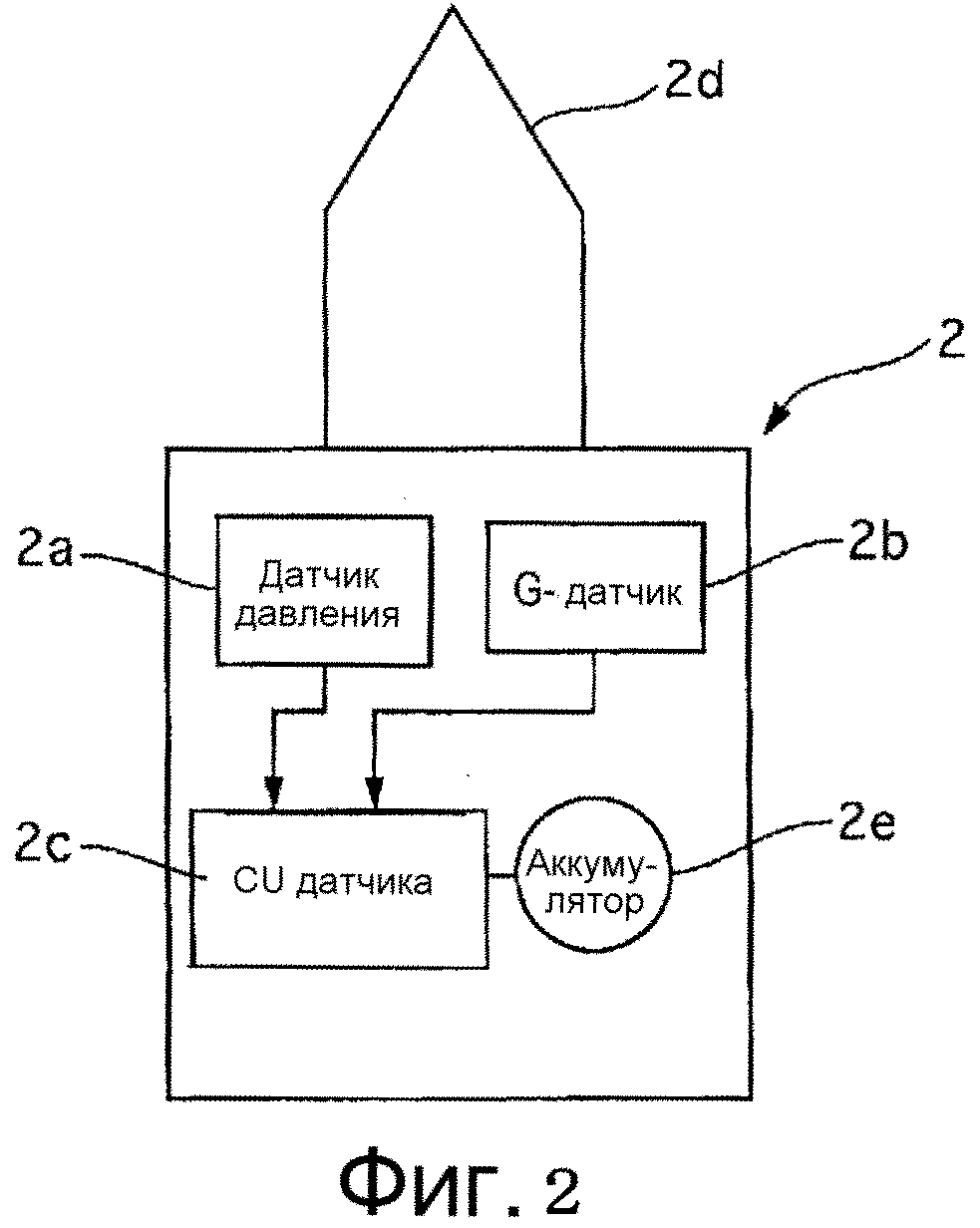
Фиг. 2 - схема конфигурации TPMS-датчика 2;
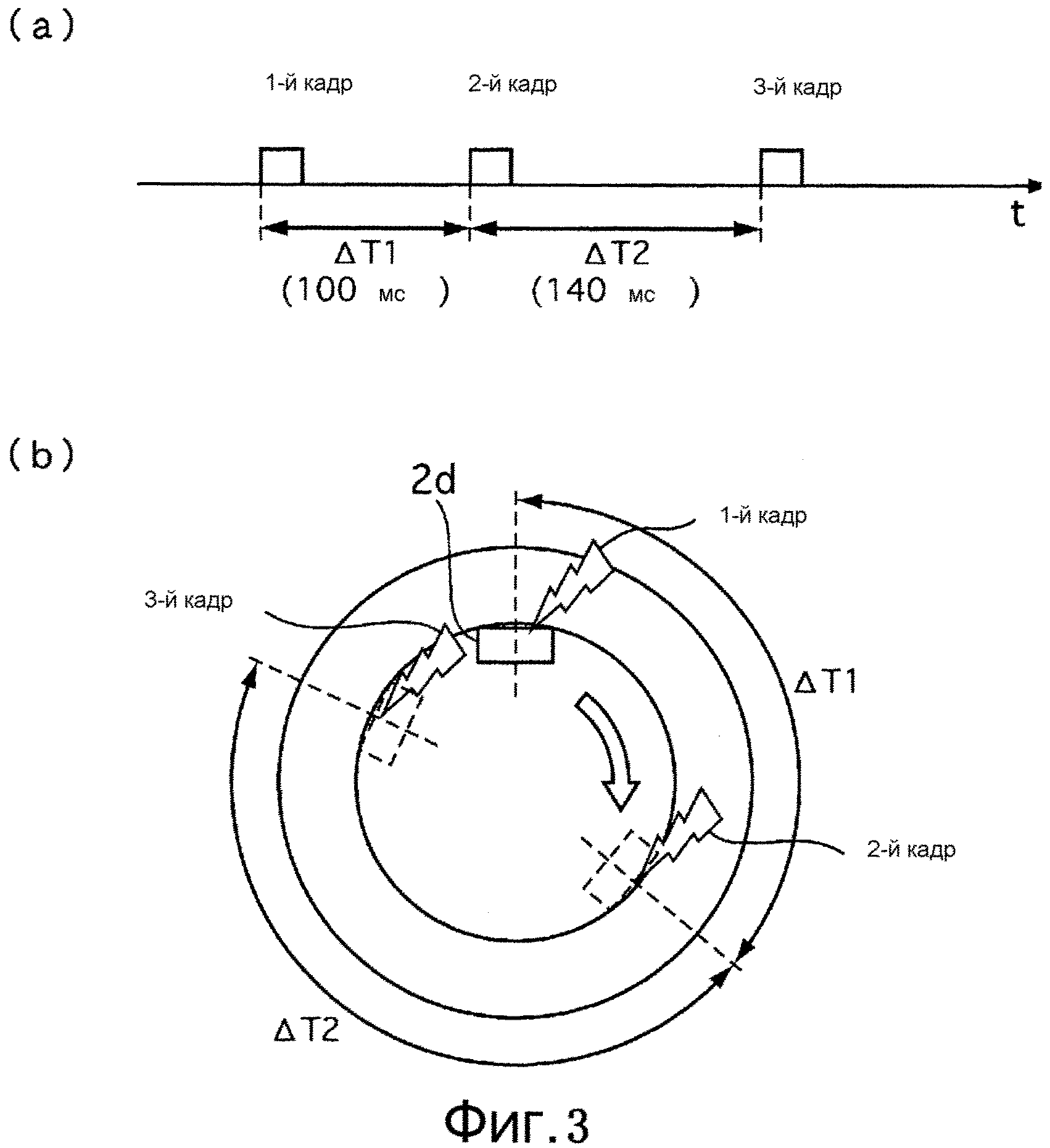
Фиг. 3 - диаграмма, иллюстрирующая способ передачи каждого кадра TPMS-данных в первом варианте осуществления;
Фиг. 4 - блок-схема управления TPMSCU 4 для выполнения управления определением положения колеса;
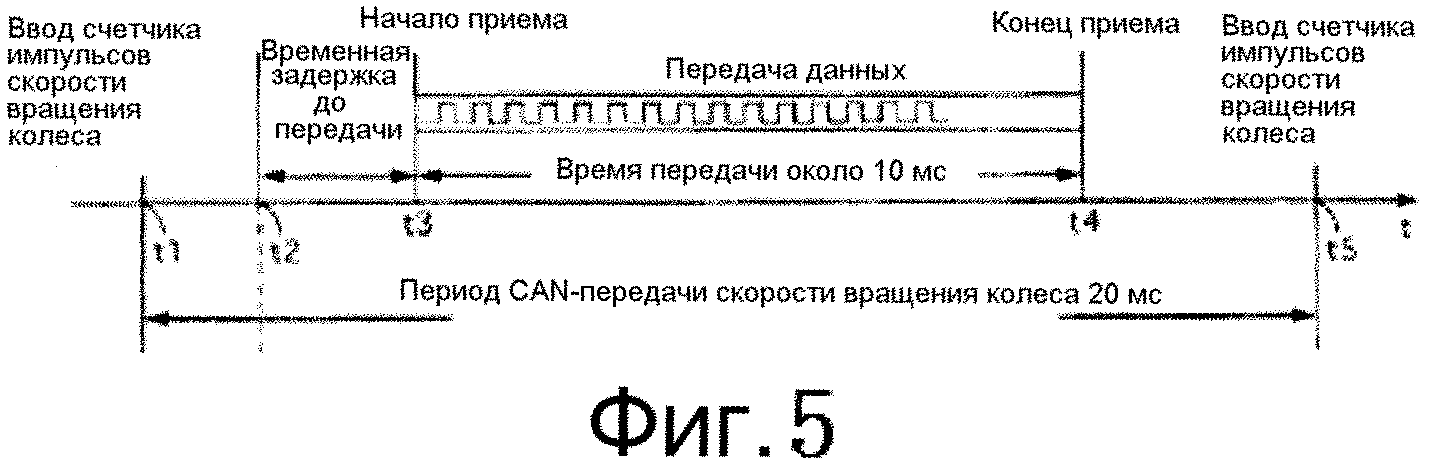
Фиг. 5 - схема, иллюстрирующая способ вычисления углового положения TPMS-датчика 2 (передатчика 2d);
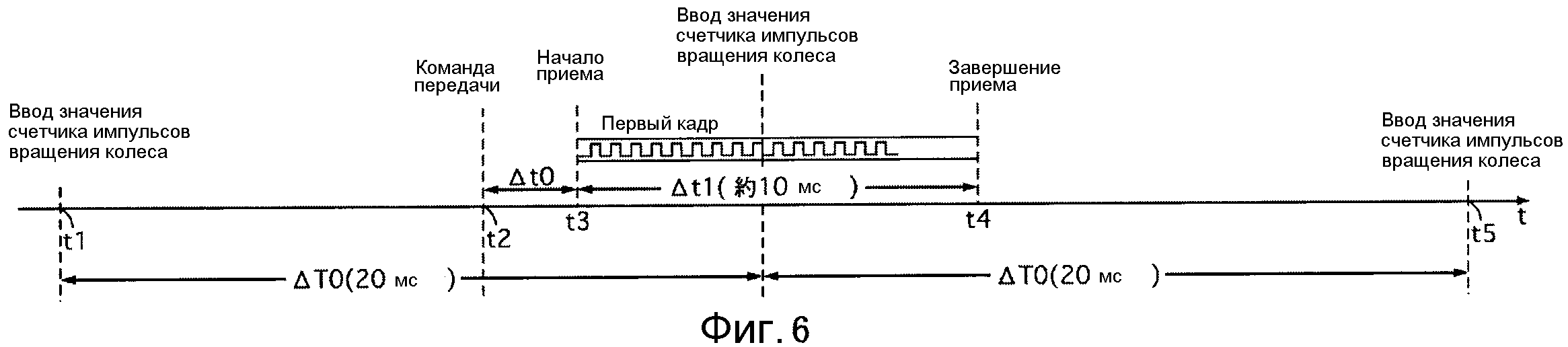
Фиг. 6 - другая схема, иллюстрирующая способ вычисления углового положения TPMS-датчика 2 (передатчика 2d);
Фиг. 7 - схема, иллюстрирующая способ вычисления значения дисперсионной характеристики;
Фиг. 8 - блок-схема последовательности операций, иллюстрирующая последовательность операций процесса управления определением положения колеса;
Фиг. 9 - схема, иллюстрирующая соотношение между угловыми положениями (числом зубцов ротора) каждого из колес 1FL, 1FR, 1RL, 1RR, когда угловое положение TPMS-датчика 2FL левого переднего колеса 1FL принимает наивысшую точку, и числом приемов TPMS-данных;
Фиг. 10 - схема иллюстрирующая нулевую точку каждого колеса;
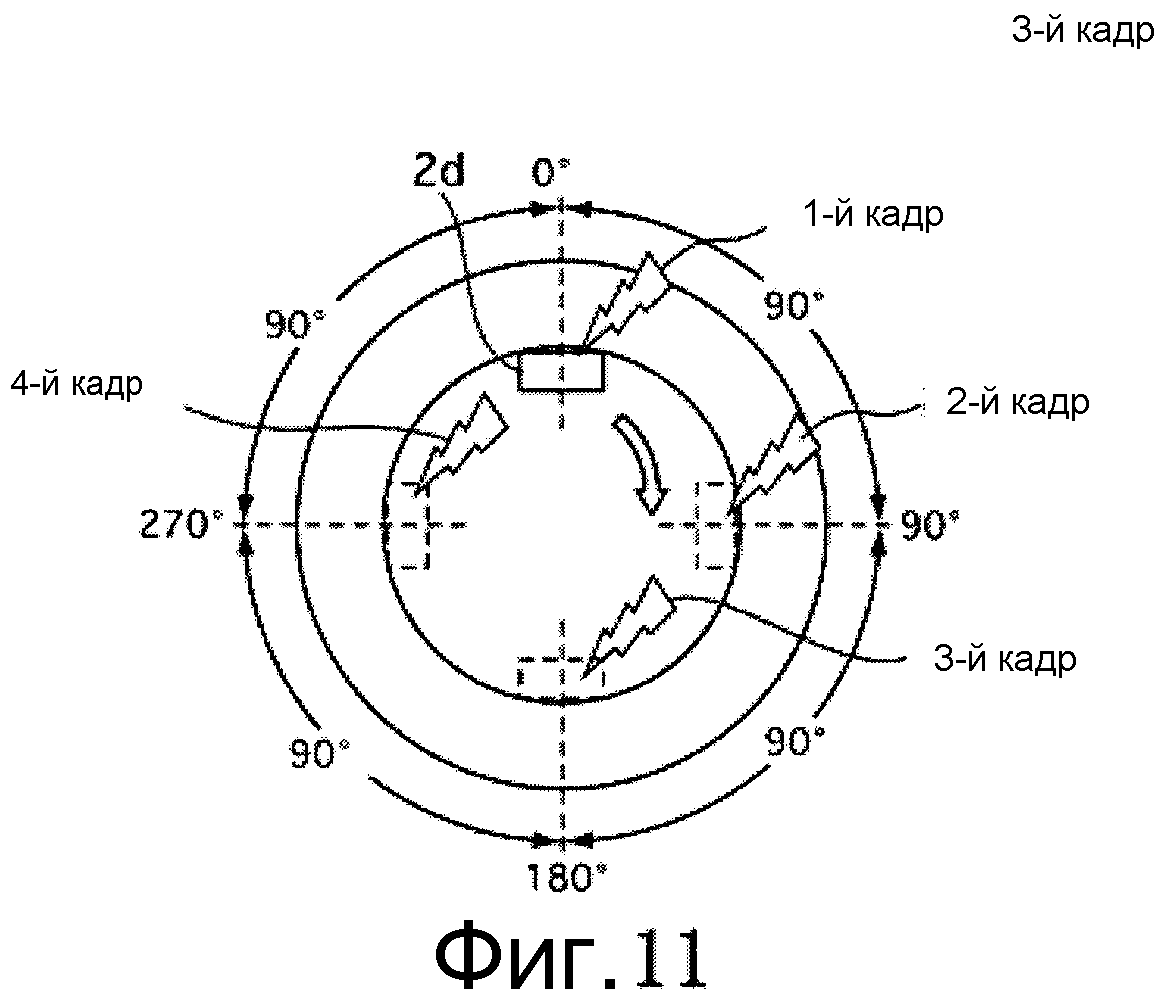
Фиг. 11 - схема, иллюстрирующая способ передачи каждого кадра TPMS-данных во втором варианте осуществления; и
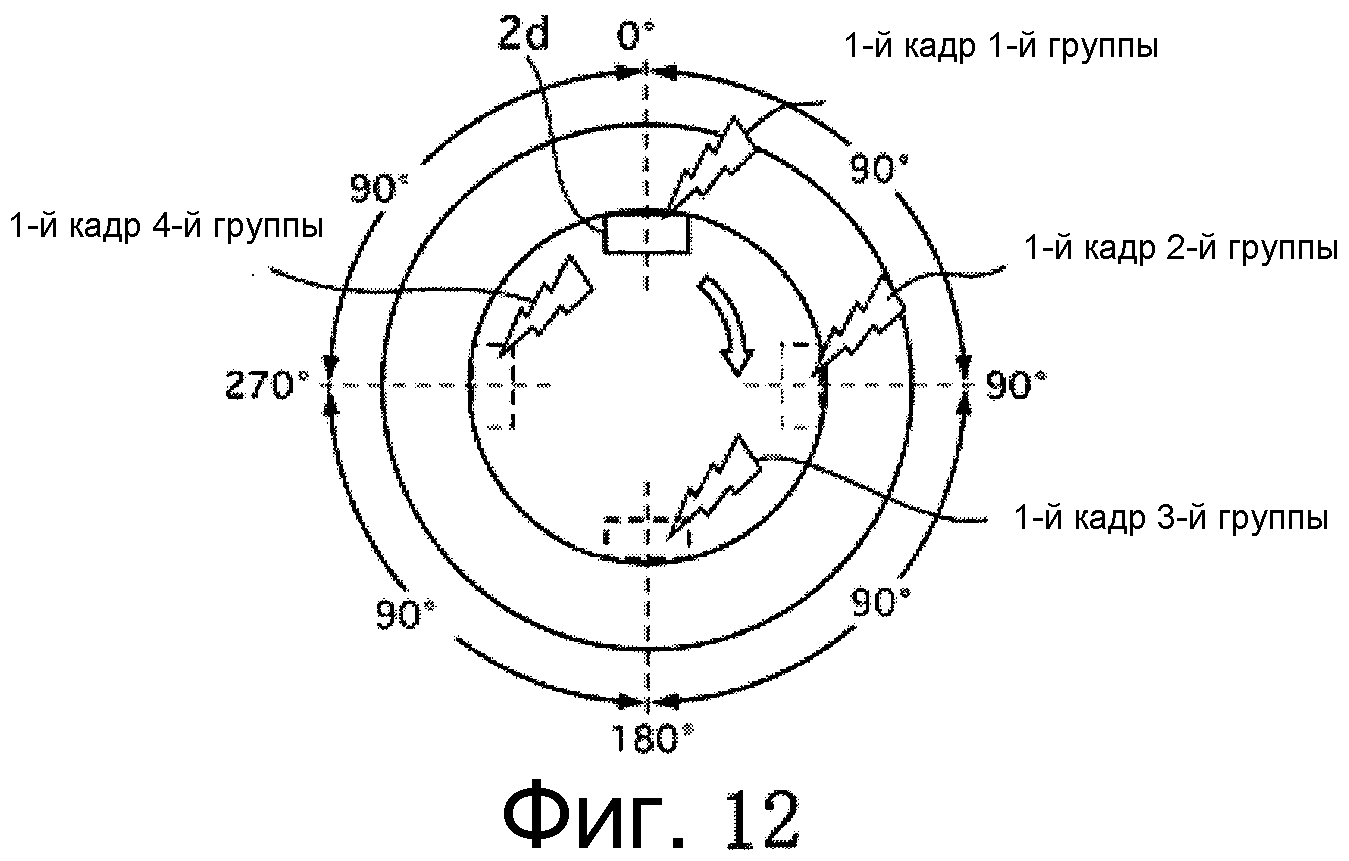
Фиг. 12 - схема, иллюстрирующая способ передачи каждого кадра TPMS-данных в третьем варианте осуществления.
Подробное описание вариантов осуществления изобретения
[0008] В последующем, варианты осуществления для выполнения настоящего изобретения будут описаны со ссылкой на чертежи.
[Первый вариант осуществления]
Фиг. 1 - конфигурационная схема, иллюстрирующая устройство контроля давления воздуха или пневматического давления в шине в первом варианте осуществления. На этой фигуре конечные символы, приложенные к каждой ссылочной позиции, предназначены, чтобы указывать следующее: FL означает левое переднее колесо, FR означает правое переднее колесо, RL означает левое заднее колесо, а RR означает правое заднее колесо, соответственно. В последующем описании, когда специально не требуется, описание FL, FR, RL и RR будет опущено.
Устройство контроля давления воздуха или пневматического давления в шине в первом варианте осуществления снабжено TPMS-датчиками 2 (TPMS - система контроля давления в шине), приемником 3, блоком управления TPMS (TPMSCU) 4, дисплеем 5 и датчиками 8 скорости вращения колес. TPMS-датчик 2 устанавливается на каждом из колес 1, а приемник 3, TPMSCU 4, дисплей 5 и датчики 8 скорости вращения колес размещаются на стороне кузова транспортного средства.
[0009] TPMS-датчик 2 устанавливается в положении воздушного клапана (не показан на чертеже) каждой шины. Фиг. 2 - схема, иллюстрирующая конфигурацию TPMS-датчика 2. TPMS-датчик 2 содержит датчик давления (механизм определения давления воздуха в шине) 2a, датчик ускорения (G-датчик) 2b, блок управления датчиком (CU датчика) 2c, передатчик 2d и аккумулятор 2e таблеточного типа.
Здесь, датчик 2a давления измеряет давление [кПа] воздуха шины.
G-датчик 2b обнаруживает ускорение в центробежном направлении [G], действующее на шину.
CU 2c датчика работает от мощности, подаваемой от аккумулятора 2e таблеточного типа, и TPMS-данные, содержащие информацию о давлении воздуха в шине, обнаруженном датчиком 2a давления, и ID датчика (идентификационную информацию), отправляются в качестве беспроводного сигнала из передатчика 2d. В первом варианте осуществления ID датчиков определены цифрами от 1 до 4.
[0010] CU 2c датчика сравнивает ускорение в центробежном направлении, обнаруженное G-датчиком 2b, с предварительно заданным пороговым значением для определения состояния движения транспортного средства. Когда ускорение в центробежном направлении меньше, чем пороговое значение определения движения, выполняется определение, что транспортное средство остановлено или неподвижно, так что передача TPMS-данных прекращается. С другой стороны, когда ускорение в центробежном направлении превышает пороговое значение определения движения, выполняется определение, что транспортное средство движется, и TPMS-данные будут передаваться в предписанный момент времени.
Приемник 3 принимает беспроводные сигналы, выводимые из каждого TPMS-датчика 2, чтобы декодировать и выводить их в TPMSCU 4.
[0011] TPMSCU 4 считывает соответствующие TPMS-данные на основе ID датчика в TPMS-данных и со ссылкой на соотношение соответствия между каждым из ID датчиков и положениями колес (FL, FR, RL, RR), сохраненное в энергонезависимой памяти 4d (см. фиг. 3), TPMSCU 4 определяет, какому положению колеса TPMS-данные соответствуют, и указывает на дисплее 5 давление воздуха в шине, содержащееся в TPMS-данных, в качестве пневматического давления соответствующего положения колеса. Когда давление воздуха в шине становится ниже нижнего предельного порога, уменьшение в давлении воздуха сообщается посредством изменения цвета дисплея, мигания на дисплее, предупреждающего сигнала или т.п.
[0012] Каждый датчик 8 скорости вращения колеса является формирователем импульсов, который формирует цепочку импульсов предварительно определенного числа z (z=48, например) при каждом обороте колеса 1 и состоит из ротора в форме зубчатого колеса, который вращается синхронно с колесом 1, и статора (постоянного магнита плюс катушки), расположенного обращенным лицевой стороной к внешней окружности ротора на кузове транспортного средства. Когда ротор вращается и заставляет выступающую или протягивающуюся наружу поверхность ротора пересекать магнитное поле, образованное по окружности статора, то, тем самым, изменяется плотность магнитного потока, что создает электродвижущую силу, изменения которой выводятся в качестве импульсных сигналов в ABSCU 6.
ABSCU 6 обнаруживает скорость вращения колеса для каждого колеса 1 на основе импульсов скорости вращения колеса от каждого из датчиков 8 скорости вращения колеса, и когда какое-нибудь колесо показывает тенденцию к блокировке, выполняет антиблокировочное управление тормозами посредством задействования ABS-актуатора (не показан), чтобы регулировать или удерживать давление колесного гидравлического тормозного цилиндра этого колеса, чтобы, тем самым, пресекать тенденцию к блокировке. ABSCU 6 выводит в CAN-линию связи значение счетчика импульсов скорости вращения колеса с предварительно определенным интервалом времени ΔT0 (20 мс периода или цикла, например).
[0013] Как описано выше, на основе соотношения соответствия между ID датчика и положением колеса, сохраненного в памяти 4d, TPMSCU 4 определяет, к какому колесу принятые TPMS-данные принадлежат. Следовательно, когда выполняется перестановка шин, в то время как транспортное средство стоит, соотношение соответствия между ID датчика и положением колеса, сохраненное в памяти 4d, не согласуется с фактическим соотношением соответствия, и невозможно определять, к какому колесу принадлежат TPMS-данные. Здесь, "перестановка шин" ссылается на операцию обмена местами положений установки шин на колесах с тем, чтобы обеспечивать равномерный износ протектора шин и, таким образом, продлевать срок эксплуатации (срок службы протектора). Например, для пассажирского транспортного средства обычно шины передних/задних колес меняются местами, как и шины левых/правых колес.
Здесь, согласно первому варианту осуществления, для того, чтобы обновлять и сохранять в памяти 4d соотношение соответствия между ID каждого датчика и положением каждого колеса после перестановки шин, когда существует вероятность того, что перестановка шин была выполнена, период передачи TPMS-данных на стороне каждого TPMS-датчика 2 будет изменен, а на стороне TPMSCU4, на основе периода передачи TPMS-данных и импульса скорости каждого колеса, будет выполнено определение, с каким колесом ассоциирован TPMS-датчик.
[0014] [Режим передачи в постоянной позиции]
Когда время определения остановки транспортного средства непосредственно перед началом движения транспортного средства составляет или больше, чем предварительно определенное время (например, 15 мин), CU 2 с датчика для TPMS-датчика 2 определяет, что могла быть выполнена перестановка шин.
Когда время определения остановки транспортного средства непосредственно перед началом движения транспортного средства меньше предварительно определенного времени T1, CU 2c датчика выполняет "обычный режим", в котором TPMS-данные передаются в каждом постоянном или предварительно определенном интервале (например, с интервалом в одну минуту). С другой стороны, когда время определения остановки транспортного средства составляет или больше предварительно определенного времени T1, CU датчика выполняет "режим передачи в постоянной или фиксированной позиции", в котором, в интервале, более коротком, чем интервал передачи в обычном режиме (например, с интервалом около 16 секунд), TPMS-данные передаются в постоянном или предварительно определенном угловом положении.
[0015] Режим передачи в постоянной позиции выполняется до тех пор, пока число передач TPMS-данных не достигнет предварительно определенного числа раз (например, 40 циклов). Когда число случаев передачи достигает предварительно определенного числа раз, режим передачи в постоянной позиции переходит в обычный режим. Когда выполнено определение о том, что транспортное средство стоит, прежде чем число случаев передачи TPMS-данных достигает предварительно определенного числа раз, если время определения остановки транспортного средства короче, чем предварительно определенное время (15 мин), режим передачи в постоянной позиции перед остановкой транспортного средства продолжается до тех пор, пока число случаев передачи не достигнет предварительно определенного числа раз. Когда время определения остановки транспортного средства дольше, чем предварительно определенное время, продолжение режима передачи в постоянной позиции перед остановкой транспортного средства отменяется, и новый режим передачи в постоянной позиции начинается.
[0016] В режиме передачи в постоянной позиции, на основе зависимой от гравитационного ускорения составляющей ускорения в центробежном направлении, обнаруженного G-датчиком 2b, CU 2c датчика определяет момент передачи TPMS-данных в режиме передачи в постоянной позиции. Ускорение в центробежном направлении, действующее на TPMS-датчик 2, изменяется в соответствии с ускорением/замедлением колес 1, кроме того, зависимая от гравитационного ускорения составляющая всегда постоянна. Т.е. ускорение в центробежном направлении, действующее на TPMS-датчик, показывает форму волны с +1 [G] в верхней точке, -1 [G] в нижней точке и 0 [G] в среднем положении в 90° между верхней точкой и нижней точкой. Другими словами, контролируя величину и направление составляющей гравитационного ускорения в ускорении в центробежном направлении, возможно улавливать или идентифицировать угловое положение TPMS-датчика 2. В результате, например, выводя TPMS-данные на пике зависимой от гравитационного ускорения составляющей, TPMS-данные могут выводиться постоянно в верхней точке.
[0017] В режиме передачи в постоянной позиции CU 2c датчика передает множество, а более конкретно, три кадра одинакового содержимого, включающего в себя информацию о давлении в шине и ID датчика. Первый кадр передается в верхней точке, и с временным интервалом передается другой кадр. Более конкретно, второй кадр передается с первым временным интервалом ΔT1 (100 мс, например) после передачи первого кадра, третий кадр - после временного интервала ΔT2 (140 мс, например). Номер кадра (1-3) добавляется в качестве идентификационной информации в каждом кадре, так что порядок кадров будет очевиден.
[0018] [Режим автообучения]
Когда время, которое прошло от положения выключения до положения включения замка зажигания, равно предварительно определенному времени T2 (например, 15 мин) или более, TPMSCU 4 определяет, что могла быть выполнена перестановка шин.
Когда время, которое прошло от выключения до включения замка зажигания, короче, чем предварительно определенное время T2, на основе информации о давлении воздуха в TPMS-данных, передаваемых от каждого TPMS-датчика 2, TPMSCU 4 выполняет "режим контроля", в котором контролируют давление воздуха в шине каждого колеса 1. С другой стороны, когда прошедшее время от выключения до включения замка зажигания продолжительнее, чем предварительно определенное время, TPMSCU 4 выполняет "режим автообучения", который будет выполняться до тех пор, пока положения колес всех TPMS-датчиков 2 не будут определены, или до тех пор, пока не пройдет предварительно определенное совокупное время движения (например, 8 минут) от начала этого режима. Когда положения колес всех TPMS-датчиков определены, или предварительно определенное совокупное время прошло, управление переходит в режим контроля.
[0019] Даже в режиме автообучения по-прежнему можно контролировать давление воздуха в шинах из информации о давлении воздуха, содержащейся в TPMS-данных. Следовательно, отображение давления воздуха и предупреждение о пониженном давлении воздуха выполняются на основе соотношения соответствия между ID датчика и положением колеса, в настоящий момент сохраненного в памяти 4d во время автоматического режима движения.
В режиме автообучения TPMSCU 4 принимает значение счетчика импульсов скорости вращения колеса от блока ABS-управления (ABSCU) 6 через CAN-шину 7 связи и выполняет управление определением положения колеса, описанное ниже.
[0020] [Управление определением положения колеса]
Фиг. 4 - блок-схема управления TPMSCU 4 для выполнения управления определением положения колеса. TPMSCU 4 имеет блок 4a вычисления углового положения (механизм обнаружения углового положения), секцию 4b вычисления дисперсии, секцию 4c определения положения колеса (механизм определения положения колеса), память 4d, блок 4e запрещения обнаружения углового положения (механизм запрещения обнаружения).
Блок 4a вычисления углового положения принимает TPMS-данные после декодирования, чтобы выводить их из приемника 3, и значения счетчика импульсов скорости вращения колеса, выведенные из ABSCU 6 в CAN-линию 7 связи, чтобы вычислять угловое положение (число зубцов ротора) для каждого ротора, когда угловое положение каждого TPMS-датчика принимает верхнюю точку. Отметим, что "число зубцов" указывает, какой зубец датчика 8 скорости вращения колеса подсчитывается, и может быть получено делением значения счетчика импульсов скорости вращения колеса на значение счетчика при каждом обороте шины (т.е., число зубцов при каждом обороте z=48). В первом варианте осуществления, когда значение счетчика импульсов скорости вращения колеса первого интервала времени от начала режима автообучения вводится, значение, полученное добавлением 1 к остатку операции деления значения счетчика числа зубцов 1 цикла или оборота, принимается в качестве опорного числа зубцов. Во второй и последующие разы, на основе подсчитанного числа импульсов скорости колеса относительно справочного числа зубцов (т.е., текущее подсчитанное значение - подсчитанное значение в первый раз), число зубцов может быть определено.
[0021] Фиг. 5 - схема, показывающая способ вычисления углового положения TPMS-датчика 2 (передатчика 2d) каждого колеса 1.
Блок 4a вычисления углового положения при каждом случае приема TPMS-данных (с первого по третий кадр) сохраняет время приема и содержимое данных. Дополнительно, каждый раз, когда принимается значение счетчика импульсов скорости вращения колеса через CAN-линию 7 связи, сохраняются и время ввода, и значение счетчика.
[0022] Сначала дается объяснение того, когда принят первый кадр. На фиг. 5 t1 представляет время, в которое значение счетчика (предыдущее значение) импульсов скорости вращения колеса вводится непосредственно перед приемом TPMS-данных (первого кадра); t2 представляет время, когда угловое положение TPMS-датчика 2 достигает верхней точки, и выдается команда передачи TPMS-данных (первого кадра); t3 представляет время, когда TPMS-датчик 2 фактически начинает передачу TPMS-данных (первого кадра), которое может считаться тем же временем, когда TPMSCU 4 начинает прием первого кадра; t4 представляет время, когда прием TPMS-данных (первого кадра) посредством TPMSCU 4 завершен; и t5 представляет время, когда вводится значение счетчика импульсов скорости вращения колеса. В этом случае, который может считаться тем же временем, что и время, в которое TPMS-датчик 2 заканчивает передавать первый кадр, t1, t4 и t5 является временем ввода значения счетчика (текущего значения) для импульсов скорости вращения колеса непосредственно после приема TPMS-данных (первого кадра). Блок 4a вычисления углового положения, в дополнение к сохранению времени t1, t4 и t5, вычисляет время t3 посредством вычитания из времени t4 времени Δt1 передачи (которое ранее предварительно задано как значение, уникальное для передатчика 2d, в зависимости от длины данных, например, 10 мс) TPMS-данных (первого кадра, т.е., t4-Δt1 = t3). Отметим, что вместо вычисления времени t2 из времени t4 время t3 может быть непосредственно определено и сохранено для вычисления времени t2 на основе времени t3.
Следовательно, предполагаемым числом зубцов в t1 является zt1, числом зубцов в t2 является zt2, а числом зубцов в t5 является zt5, соответственно, устанавливается равенство, которое следует ниже.
(t2−t1)/(t5−t1)=(zt2−zt1)/(zt5−zt1)
Поскольку
zt2=zt1+(zt5−zt1)*(t2−t1)/(t5−t1)
число зубцов zt2 выражается следующим уравнением, когда угловое положение TPMS-датчика 2 находится в верхней точке:
zt2=zt1+ (z t5−zt1)*(t 2−t1)/(t5−t1) (1)
при этом (zt5-zt1)/(t5-t1) соответствует числу зубцов в единицу времени.
Следует отметить, что значение счетчика импульсов скорости вращения колеса вводится во время приема TPMS-данных (фиг. 6). В этом случае, также, на основе времени t1, в которое значение счетчика импульсов скорости вращения колеса вводится непосредственно перед приемом TPMS-данных, и времени t5, в которое значение счетчика импульсов скорости вращения колеса вводится непосредственно после приема TPMS-данных, число зубцов zt2 во время t2 может быть вычислено с помощью уравнения, описанного выше.
Как описано выше, блок 4a вычисления углового положения вычисляет угловое положение относительно каждого колеса во время передачи из передатчика 2d (время t2 команды передачи) на основе принятой информации (время t4 завершения приема) беспроводного сигнала (передаваемых данных) от передатчика 2d и информации об угловом положении колеса 1 (время t1, t5 ввода, число зубцов zt1, zt5), введенной через CAN-линию 7 связи.
[0023] Далее будет дано описание способа вычисления в случае приема второго кадра без приема первого кадра. Второй кадр передается через 100 мс после передачи первого кадра, т.е. после временного интервала ΔT1, который в пять раз больше периода ΔT0 (20 мс), с которым вводится значение счетчика импульсов скорости вращения колеса. Таким образом, в вышеприведенном уравнении (1), при использовании предыдущих zt1 и zt5, которые в пять раз больше периода (ΔT0 × 5), с которым вводится значение счетчика скорости вращения колеса, может быть вычислено угловое положение zt2 колеса в момент времени, в который угловое положение TPMS-датчика 2 достигло наивысшей или верхней точки (в момент времени, в который выдается команда передачи первого кадра). Более конкретно, предполагается, что время, в которое значение счетчика (предыдущее значение) импульсов скорости вращения колеса непосредственно перед приемом второго кадра равно t1', время, в которое выдается команда передачи второго кадра по прошествии времени 100 мс от времени t2 команды передачи второго кадра, равно t2', время, в которое TPMSCU 4 завершил фактически принимать второй кадр, равно t4', и время, в которое значение счетчика импульсов скорости вращения колеса (текущее значение) вводится непосредственно после завершения приема второго кадра, равно t5'. Блок 4a вычисления углового положения сохраняет время t1', t4' и t5'. Кроме того, при определении приема второго кадра на основе номера кадра, на основе следующих уравнений:
t1=t1'-100 мс
t4=t4'-100 мс
t5=t5'-100 мс
вычисляются времена t1, t4 и t5 (см. фиг. 5) соответственно. Дополнительно, блок 4a вычисления углового положения сохраняет число зубцов zt1 в момент времени t1, zt5 - в момент времени t5. Кроме того, устанавливается следующее уравнение.
(t2-t1)
= {t4-(t4-t3)-(t3-t2) -t1}
={t4'-(t4'-t3')-(t3'-t2)'-'t1 }.
Т.е. (t4'-t1')=(t4-t1), (t4'-t3')=(t4-t3)=Δt1, (t3'-t2')=(t3-t2)=Δt0. Следовательно, число зубцов zt2, когда угловое положение TPMS-датчика 2 достигло наивысшей или верхней точки в момент времени t2, может быть вычислено посредством вышеприведенного уравнения (1). Кроме того, после вычисления тем же образом, что и вышеприведенное уравнение (1), чтобы получать число зубцов во время t2' команды передачи второго кадра во время t2' команды передачи второго кадра, посредством вычитания числа зубцов в момент времени в 100 мс также может быть вычислено число зубцов zt2 во время команды t2 передачи первого кадра.
[0024] Теперь приводится описание способа вычисления при приеме третьего кадра без приема первого и второго кадров. Третий кадр задается через 140 мс после передачи второго кадра, т.е. после временного интервала ΔT2, в семь раз большего периода ввода, с которым вводится значение счетчика импульсов скорости вращения колеса (ΔT×7). Таким образом, блок 4a вычисления углового положения, при определении приема третьего кадра на основе номера кадра, вычисляет число зубцов zt2 в момент времени, в который угловое положение TPMS-датчика 2 достигло верхней точки, с помощью значений zt1, zt5, которые были представлены 12 периодами (=5+7) ранее в вышеупомянутом уравнении (1).
[0025] Кстати, интервал ΔT между кадрами не ограничен кратным числом периода ввода значения счетчика импульсов скорости вращения колеса ΔT0 (20 мс), а может использовать произвольное значение. В этом случае, также, число зубцов zt2 в момент времени, в который угловое положение TPMS-датчика 2 достигло верхней точки (в момент времени t2, в который выдается команда передачи первого кадра), вычисляется на основе принятой информации (времени начала приема и времени завершения приема кадра, отличного от первого кадра) от передатчика 2d и информации об угловом положении (времени ввода значения счетчика и числа зубцов), введенной через CAN-линию 7 связи. В первом варианте осуществления, поскольку временной интервал ΔT1 между кадрами задан кратным (100 мс, 140 мс) периоду ΔT0 ввода (20 мс) из CAN-линии 7 связи, вычисление может быть упрощено.
[0026] Секция 4b вычисления дисперсии накапливает угловое положение каждого колеса 1, которое вычисляется в блоке 4a вычисления углового положения для ID каждого датчика, чтобы получать данные углового положения, и вычисляет степень дисперсии в каждых данных углового положения для ID каждого датчика в качестве значения дисперсионной характеристики. Вычисление значения дисперсионной характеристики выполняется каждый раз, когда угловое положение для идентичного ID датчика вычисляется посредством блока 4a вычисления углового положения.
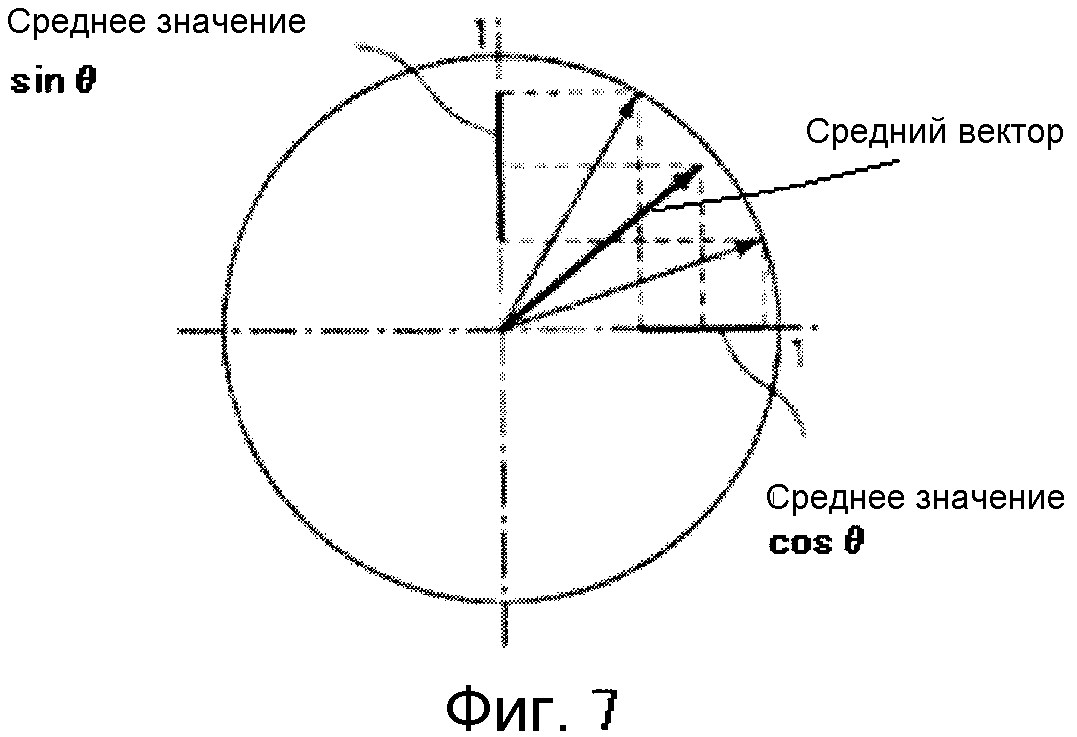
Фиг. 7 - схема, иллюстрирующая способ вычисления значения дисперсионной характеристики. Согласно первому варианту осуществления предполагается единичная окружность (окружность с радиусом, равным 1) с исходной точкой (0, 0) на двухмерной плоскости, и угловое положение θ [град.] (=360×число зубцов ротора/48) каждого колеса 1 преобразуется в окружные координаты (cos θ, sin θ) на единичной окружности. Более конкретно, угловое положение каждого колеса 1 вычисляется следующим образом: рассмотрим вектор, имеющий исходную точку (0, 0) в качестве начальной точки и координаты (cos θ, sin θ) в качестве конца с длиной, равной 1, получаются средние векторы (ave_cos θ, ave_sin θ) каждого вектора одних и тех же данных углового положения, и вычисляется скалярная величина среднего вектора в качестве значения X дисперсионной характеристики данных углового положения:
(cos θ, sin θ)=(cos((zt2+1)*2π/48), sin((zt2+1)*2π/48)).
Следовательно, предположим число случаев приема TPMS-данных относительно идентичного ID датчика как n (n является положительным целым), средние векторы (ave_cos θ, ave_sin θ) выражаются следующим образом:
(ave_cos θ, ave_sin θ)=((Σ(cos θ))/n, (Σ(sin θ))/n).
Значение X дисперсионной характеристики может, таким образом, быть представлено как следующее:
X=ave_cos θ2+ave_sin θ2.
Угловое положение колеса 1 является данными об угле периодичности. Вычисляя значение X дисперсии как скалярную величину среднего вектора, возможно определять степень изменения углового положения, избегая периодичности.
[0027] Блок 4c определения положения колеса сравнивает значения X дисперсионной характеристики каждых данных углового положения одного и того же ID датчика, которые вычислены блоком 4b вычисления дисперсии. Когда наивысшее значение из значений X дисперсионной характеристики больше первого порогового значения (например, 0,57), и значения X дисперсионной характеристики оставшихся трех характеристик все меньше второго порогового значения (например, 0,37), тогда положение колеса из данных углового положения, которые соответствуют максимальному значению X дисперсионной характеристики, т.е. положение колеса датчика 8 скорости вращения колеса, который обнаружил эти данные углового положения, определяется как положение колеса TPMS-датчика, соответствующего ID датчика этих данных углового положения. Выполняя это определение для ID всех датчиков, соотношения соответствия между ID каждого датчика и положением каждого колеса могут быть получены и сохранены в памяти 4d посредством процесса обновления.
Вместо простого выбора максимального значения для значения X дисперсионной характеристики, а дополнительно сравнивая максимальное значение с первым пороговым значением (0,57), возможно гарантировать некоторую степень точности. Более того, сравнивая значения X дисперсионной характеристики, отличные от максимального значения, со вторым пороговым значением (0,37), предварительно определенное различие между максимальным и другими тремя значениями может быть подтверждено с тем, чтобы улучшать точность обнаружения. Следовательно, возможно добиваться как сокращения времени определения, так и обеспечения точности определения в небольшом числе приемов, например 10 раз.
[0028] [Процесс управления определением положения колеса]
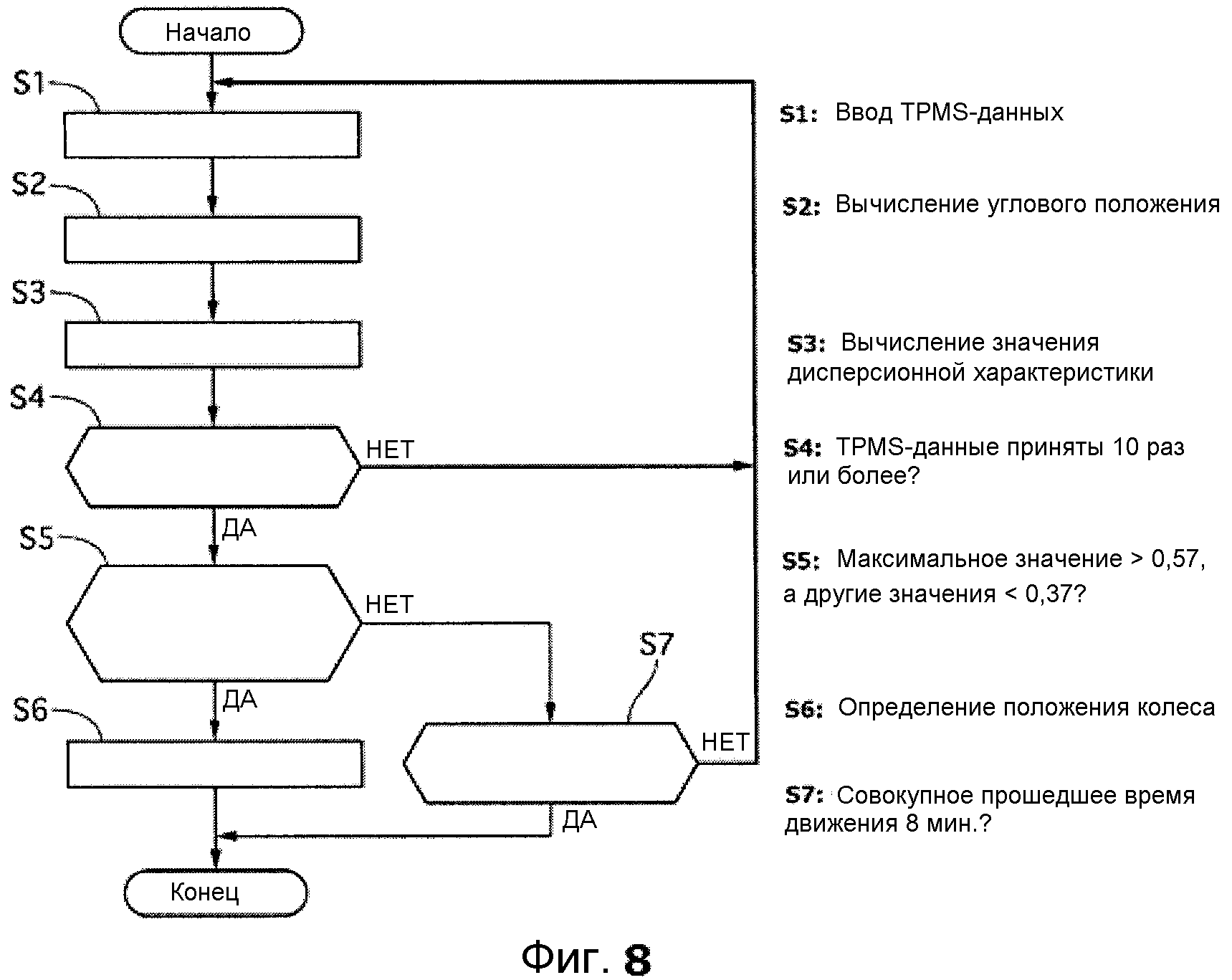
Фиг. 8 - блок-схема последовательности операций, иллюстрирующая последовательность операций процесса управления определением положения колеса согласно первому варианту осуществления. В последующем, соответствующие этапы операции будут описаны. В последующем описании предполагается случай, когда ID датчика равен "1". Однако для других ID (ID=2, 3, 4), процесс управления определением положения колеса также выполняется параллельно.
На этапе S1 блок 4a вычисления углового положения принимает TPMS-данные с ID датчика, равным 1. При приеме, по меньшей мере, одного из первого-третьего кадров предполагается, что TPMS-данные приняты один раз.
На этапе S2 блок 4a вычисления углового положения вычисляет угловое положение каждого колеса 1 на основе информации из принятых данных (любой один из первого-третьего кадров).
[0029] На этапе S3 блок 4b вычисления дисперсии вычисляет значение X дисперсионной характеристики данных углового положения каждого колеса 1.
На этапе S4 выполняется определение относительно того, приняты ли TPMS-данные с ID датчика, равным 1, предварительно определенное число раз (например, 10 раз) или более. Если результатом определения является "Да", операция переходит к этапу S5. Если определением является "Нет", операция возвращается к этапу S1.
На этапе S5 секция 4c определения положения колеса определяет, превышает или нет максимальное значение значения дисперсионной характеристики первое пороговое значение 0,57, и меньше или нет значение оставшихся значений дисперсионной характеристики второго порогового значения 0,37. Если определением является "Да", операция переходит к этапу S6; если результатом определения является "Нет", операция переходит к этапу S7.
[0030] На этапе S6, секция 4c определения положения колеса определяет положение колеса из данных углового положения, соответствующих наивысшему или максимальному значению дисперсионной характеристики, как положение колеса для ID этого датчика. Затем процесс автообучения заканчивается.
На этапе S7 секция 4c определения положения колеса определяет, прошло ли предварительно определенное совокупное или накопленное время движения (например, 8 мин) от начала режима автообучения. Если результатом определения является "Нет", операция возвращается к этапу S1. Если результатом определения является "Да", режим автообучения завершается.
Когда секция 4c определения положения колеса может иметь возможность определять положения колес для всех ID датчиков в течение предварительно определенного накопленного времени движения, соотношение соответствия между ID датчика и положением колеса обновляется и сохраняется в памяти 4d для регистрации. С другой стороны, когда невозможно определять положение колеса для всех ID датчиков в течение предварительно определенного накопленного времени движения, соотношение соответствия между множеством ID датчиков и положением каждого колеса, в настоящий момент сохраненное в памяти 4d, продолжает использоваться.
[0031] Далее поясняется процесс.
TPMS-датчик 2 работает следующим образом: когда время определения остановки транспортного средства непосредственно перед началом движения транспортного средства составляет 15 мин или дольше, выполняется определение, что существует вероятность того, что выполнена перестановка шин, и операция переходит из обычного режима в режим передачи в постоянной позиции. В режиме передачи в постоянной позиции, после того как 16 секунд прошло от времени предыдущей передачи, и угловое положение собственного TPMS-датчика достигает предварительно определенного положения (верхней точки), каждый TPMS-датчик 2 передает TPMS-данные. С другой стороны, когда прошедшее время между выключением и включением замка зажигания составляет 15 мин или дольше, TPMSCU 4 переходит из режима контроля в режим автообучения. В режиме автообучения, каждый раз, когда TPMS-данные принимаются от каждого TPMS-датчика 2, TPMSCU 4 вычисляет угловое положение (число зубцов ротора) каждого колеса 1, когда угловое положение TPMS-датчика 2 достигает предварительно определенного положения (верхней точки), на основе времени ввода значения счетчика импульсов скорости вращения колеса, времени завершения приема TPMS-данных и т.п. Это выполняется повторно 10 или более раз и накапливается в качестве данных углового положения. Среди данных углового положения положение колеса, соответствующее данным углового положения с наименьшей степенью дисперсии, определяется как положение колеса этого TPMS-датчика 2.
[0032] Отметим, что, устанавливая интервал передачи в 16 секунд + α, некоторая величина совокупного интервала перемещения будет получена, пока TPMS-данные не будут приняты десять раз или более. Следовательно, достаточное различие в значении X дисперсионной характеристики между рассматриваемым и другим колесом может быть создано, чтобы гарантировать точное определение положения колеса.
При приеме TPMS-данных сорок (40) раз во время режима передачи в постоянной позиции TPMS-датчик 2 переходит в обычный режим. В частности, TPMS-датчик 2 потребляет энергию аккумулятора 2e таблеточного типа большей частью при передаче TPMS-данных. Таким образом, когда положение каждого колеса не может быть определено, несмотря на прохождение достаточного совокупного времени перемещения, режим передачи в постоянной позиции будет завершен, чтобы переходить в обычный режим, что может пресекать сокращение срока эксплуатации аккумулятора.
С другой стороны, когда TPMSCU 4 не может определить соответствие между ID каждого датчика и положением каждого колеса, несмотря на прошедшее время совокупного перемещения в восемь (8) минут, режим автообучения будет завершен, и процесс переходит в режим контроля. Общее число TPMS-данных составляет тридцать (30) раз или менее, когда прошло совокупное время перемещения в восемь минут, режим автообучения может быть завершен, по существу, синхронно с завершением режима передачи в постоянной позиции TPMS-датчика 2.
[0033] Среди традиционных устройств контроля давления в шине известно такое устройство контроля давления в шине, в котором посредством размещения одинакового числа приемников и TPMS-датчиков, которые размещаются близко к каждому приемнику, и на основе силы сигнала (т.е., различия в ней) в принятом беспроводном сигнале определяется положение колеса каждого TPMS-датчика. Однако в этом типе устройства компоновка приемника должна рассматриваться с учетом выходного сигнала датчика, изменения чувствительности приемника, эффекта от комплекта антенн, который требуется, производительности, на которую оказывает влияние среда приема или компоновка. Дополнительно, поскольку требуется четыре приемника, стоимость будет возрастать.
В отличие от этого в устройстве контроля давления воздуха в шине первого варианта осуществления возможно определять положение колеса каждого TPMS-датчика 2 без использования (разности) силы сигнала. Следовательно, возможно определять положение TPMS-датчика 2 каждого колеса независимо от среды приема и компоновки. Дополнительно, поскольку требуется только один приемник 3, возможно сохранять затраты низкими.
[0034] В качестве одного из традиционных устройств контроля давления воздуха в шине датчик угла наклона размещается для каждого TPMS-датчика, и соотношение между положением колеса TPMS-датчика и углом наклона используется, чтобы определять положение колеса TPMS-датчика (например, см. патентный документ 1). Для этого типа устройства контроля давления воздуха в шине, в ответ на движение транспортного средства, имеет место различие в скорости вращения между 4 колесами, так что соответствие между положением колеса TPMS-датчика и углом наклона изменяется. В результате, невозможно выполнять высокоточное определение по положению колеса каждого TPMS-датчика. Более конкретно, когда транспортное средство перемещается или движется, скорости вращения каждого колеса 1 могут отличаться друг от друга вследствие различия в колеях между внешними и внутренними колесами, блокировки и проскальзывания колес 1 и различия в давлении воздуха в шинах. Даже когда транспортное средство движется прямо, поскольку водитель все еще может совершать мгновенные корректировки на рулевом колесе, и существует некоторое различие в поверхности дороги между левой и правой сторонами, различие в скорости вращения опять же развивается между передними и задними колесами 1FL и 1FR и между левыми и правыми колесами 1RL и 1RR. Т.е. существует различие в скорости вращения каждого колеса в соответствии с состоянием движения транспортного средства.
[0035] В отличие от этого в первом варианте осуществления, поскольку TPMS-датчик 2 и датчик 8 скорости вращения колеса (зубцы его ротора) вращаются как единое целое, в противоположность периоду вывода конкретного TPMS-датчика 2, период вывода датчика 8 скорости вращения колеса, ассоциированного с тем же колесом, сохраняется синхронизированным (согласующимся), независимо от расстояния перемещения и состояния движения. В этой перспективе положение колеса TPMS-датчика 2 определяется на основе соотношения соответствия между угловым положением (выходные данные TPMS-датчика 2) TPMS-датчика, обнаруженным на стороне колеса 1, и угловым положением (выходные данные датчика 8 скорости вращения колеса) TPMS-датчика 2, обнаруженным на стороне кузова транспортного средства. Более конкретно, TPMS-датчик на колесе 1 обнаруживает угловое положение колеса 1 на основе зависимой от гравитационного ускорения составляющей центробежного ускорения, обнаруженного посредством G-датчика 2b, и отправляет TPMS-данные в момент времени, когда угловое положение достигло предварительно определенного, опорного положения (верхней точки в первом варианте осуществления). TPMSCU 4 на кузове транспортного средства вычисляет угловое положение (число зубцов ротора zt2) каждого колеса во время передачи TPMS-данных для передачи (т.е., когда TPMS-датчик достиг опорного положения или верхней точки), каждый раз, когда TPMS-данные принимаются от каждого TPMS-датчика 2.
В состоянии движения предположим, что угловое положение каждого колеса 1 (число зубцов zt2), вычисленное в ответ на передачу какого-нибудь конкретного TPMS-датчика 2 (например, ID=1), ограничено в предварительно определенном диапазоне только относительно какого-нибудь колеса 1 (например, левого переднего колеса 1FL). В этом случае, определяется, что существует соответствие "один к одному" между угловым положением (вычисленным значением zt2, описанным выше) TPMS-датчика 2, обнаруженным на кузове транспортного средства, и угловым положением (опорным положением или верхней точкой, в которой TPMS-датчик 2 с ID, равным 1, выполняет передачу) в этом колесе 1 (левом переднем колесе 1FL). Следовательно, в вышеописанном случае положение колеса TPMS-датчика 2 с ID, равным 1, может быть определено как вышеупомянутое колесо 1 (левое переднее колесо 1FL).
[0036] Наблюдая степень дисперсии в данных углового положения каждого колеса 1 относительно периода передачи TPMS-данных, возможно выполнять высокоточное определение по положениям колес каждого TPMS-датчика 2.
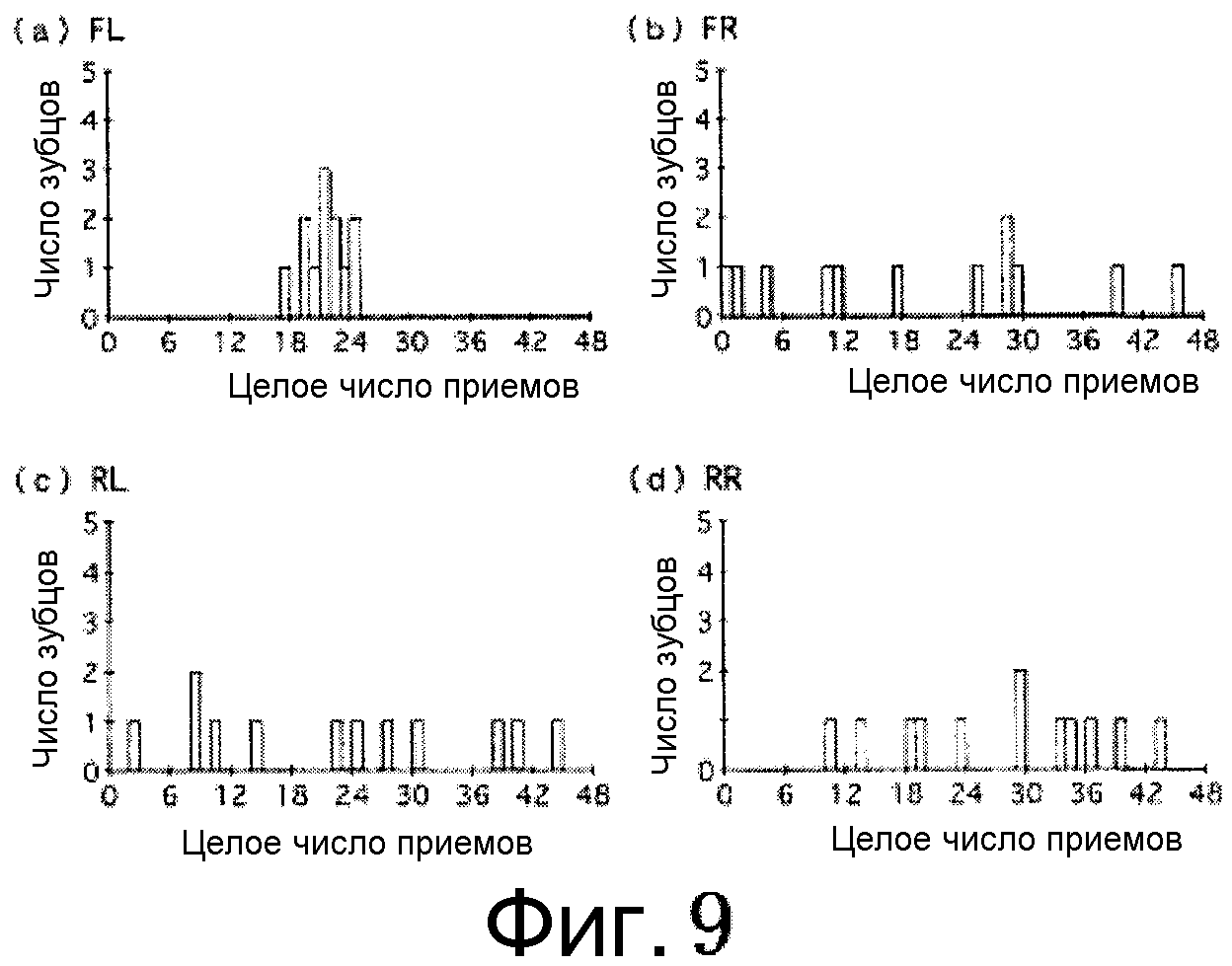
Фиг. 9 иллюстрирует соотношение между угловыми положениями (числом зубцов роторов) колес 1FL, 1FR, 1RL и 1RR, когда угловое положение TPMS-датчика 2FL левого переднего колеса 1FL достигает верхней точки, и числом случаев приема TPMS-данных. Здесь, (a) соответствует датчику 8FL скорости вращения колеса для левого переднего колеса 1FL, (b) соответствует датчику 8FR скорости вращения колеса для правого переднего колеса 1FR, (c) соответствует датчику 8RL скорости вращения колеса для левого заднего колеса 1RL и (d) соответствует датчику 8RR скорости вращения колеса для правого заднего колеса 1RR.
Как будет очевидно из фиг. 9, тогда как степени дисперсии являются высокими относительно положения колес (числа зубцов), полученных от датчиков 8FR, 8RL и 8RR скорости вращения колеса относительно других колес (правого переднего колеса 1FR, левого заднего колеса 1RL и правого заднего колеса 1RR), степень дисперсии положения колеса, полученного от датчика 8FL скорости вращения колеса относительно рассматриваемого колеса (левого переднего колеса 1FL) является минимальной или наименьшей, так что период вывода TPMS-датчика 2FL и период вывода датчика 8FL скорости вращения колеса почти синхронизированы друг с другом.
[0037] Кстати, может быть достаточным, когда положение колеса TPMS-датчика 2 определяется на основе углового положения (выходных данных датчика 8 скорости вращения колеса), обнаруженного на колесе 1, и углового положения (выходных данных датчика 8 скорости вращения колеса), обнаруженного на кузове транспортного средства. Таким образом, не требуется обязательно использовать значение X дисперсионной характеристики, как в первом варианте осуществления. Например, после перемещения транспортного средства на предварительно определенное расстояние, когда обнаружено колесо 1, с которым присутствует наименьшее изменение в значении zt2 вычисления посредством датчика 8 скорости вращения колеса относительно некоторых выходных данных TPMS-датчика, положение этого колеса 1 может быть определено как положение колеса этого TPMS-датчика 2. В первом варианте осуществления, однако, наблюдая степень дисперсии с помощью значения X дисперсионной характеристики, положение колеса каждого TPMS-датчика 2 может быть определено более точно.
[0038] В качестве G-датчика 2b TMPS-датчика 2, вместо обнаружения ускорения в центробежном направлении колеса 1 возможно использовать G-датчик для обнаружения ускорения в направлении вращения (вертикальном направлении относительно центробежного ускорения), например. Дополнительно, опорное положение для выполнения передачи (вывода) TPMS-датчиком 2 необязательно должно быть наивысшей или верхней точкой, а может быть, например, передней, задней или низшей точкой. В первом варианте осуществления состояние, в котором угловое положение TPMS-датчика находится в верхней точке, обнаруживается на основе зависимой от гравитационного ускорения составляющей центробежного ускорения, обнаруженного посредством G-датчика 2b. Поскольку G-датчик 2b, как правило, используется в существующем устройстве контроля давления в шине, чтобы определять состояние остановки или движения, может обычно применяться существующий датчик, так что дополнительные затраты на новый датчик могут быть устранены. Дополнительно, задавая верхнюю точку опорной точкой, легко различать, когда угловое положение TPMS-датчика находится в опорном положении, посредством G-датчика 2.
Дополнительно, в первом варианте осуществления TPMSCU 4 вычисляет угловое положение каждого колеса 1 на основе выходных данных датчика 8 скорости транспортного средства (числа счетчика импульсов скорости транспортного средства). Блок ABS установлен почти во всех транспортных средствах, и датчик 8 скорости транспортного средства является неотъемлемым элементом для блока ABS, и дополнительных расходов, вследствие добавления нового датчика, на стороне транспортного средства можно не допускать.
[0039] Однако при использовании существующей системы импульсы скорости вращения колеса, выводимые из датчика 8 скорости вращения колеса, вводятся как дискретные значения счетчика в TPMSCU 4 с предварительно определенным периодом ΔT0 через CAN-шину 7 связи. Это привело бы к расхождениям между временем передачи из TPMS-датчика 2 в TPMSCU 4 и временем ввода значения счетчика импульсов скорости вращения колеса в TPMSCU 4. Как показано на фиг. 5, между временем t1, t5, в которое значение счетчика импульсов скорости вращения колеса вводится, и временем t2, в которое выдается команда передачи TPMS-данных, когда угловое положение TPMS-датчика 2 достигло опорного положения (верхней точки), присутствует различие (временная задержка). Таким образом, угловое положение каждого колеса 1 (число зубцов ротора) в момент времени, в который угловое положение TPMS-датчика 2 достигло опорного значения (верхней точки) (т.е., во время передачи из этого TPMS-датчика 2), не может быть вычислено точно на основе значения счетчика импульсов скорости вращения колеса от датчика 8 скорости вращения колеса. Другими словами, при создании соответствия между угловым положением (верхней точкой) TPMS-датчика 2, обнаруженным на стороне колеса 1, и угловым положением (числом зубцов ротора) колеса 1, обнаруженным на стороне кузова транспортного средства, при использовании значения счетчика, введенного из CAN-линии 7 связи в качестве углового положения колеса 1 без модификаций, соответствие является неточным. Таким образом, точность обнаружения положения колеса TPMS-датчика 2 может ухудшаться. Отметим, что когда период ΔT0 ввода значения счетчика из TPMSCU 4 в ABSCU 6 сокращается, тем самым, устанавливая момент ввода значения счетчика в TPMSCU 4 более близким к моменту передачи из TPMS-датчика 2 в TPMSCU 4, необходимо резкое увеличение скорости передачи через CAN-линию 7 связи, что привело бы к увеличению стоимости микрокомпьютера (CU) или т.п.
[0040] В отличие от этого в первом варианте осуществления TPMSCU 4 (блок 4a вычисления углового положения) оценивает угловое положение (число зубцов zt2) TPMS-датчика 2 на основе принятой информации (времени t4 завершения приема) от TPMS-датчика 2 и информации об угловом положении (времени t1, t5 ввода, числа зубцов zt1, zt5), введенной дискретно в TPMSCU 4 с предварительно определенным периодом ΔT0. Более конкретно, число зубцов zt2 в момент времени t2, в который угловое положение TPMS-датчика 2 достигло опорного положения (верхней точки), вычисляется на основе уравнения (1), описанного выше.
Таким образом, даже когда угловое положение колеса 1 (значение счетчика импульсов скорости вращения колеса) обнаруживается дискретно на стороне кузова транспортного средства, угловое положение каждого TPMS-датчика 2 (угловое положение (число зубцов zt2) каждого колеса в момент времени, в который TPMS-датчик 2 достиг опорного значения (верхней точки)) может быть точно оценено. Таким образом, возможно устанавливать соответствие оцененного углового положения колеса (числа зубцов ротора) во время передачи из TPMS-датчика 2 угловому положению (верхней точке) колеса 1, обнаруженному на стороне колеса во время передачи из TPMS-датчика 2. Следовательно, возможно оценивать положение колеса TPMS-датчика 2 точно, в то же время пресекая увеличение стоимости, используя существующую систему.
[0041] Отметим, что вместо момента времени команды передачи (времени t2) угловое положение колеса 1 (число зубцов z ротора) также может быть вычислено в момент времени фактического начала передачи (время t3). Более конкретно, предположим, что задержка передачи TPMS-датчика 2 (временная задержка Δt0) равна нулю, угловое положение zt3 в момент времени t3 вычисляется в соответствии с нижеприведенным уравнением, и результаты вычисления могут быть использованы для определения степени дисперсии каждых данных углового положения для ID каждого датчика.
zt3=zt1+(zt5-zt1)×(t3-t1)/(t5-t1) --- (2)
В первом варианте осуществления, принимая во внимание временную задержку Δt0 (=t3-t2) между командой передачи от TPMS-датчика 2 и фактической передачей, угловое положение zt2, вычисленное посредством уравнения (1), подвергается корректировке на задержку Δt0 передачи. Следовательно, возможно вычислять более точно угловое положение (число зубцов) каждого из колес, когда угловое положение каждого TPMS-датчика 2 фактически достигает опорного значения (верхней точки). Информация о временной задержке Δt0 может быть введена в TPMSCU 4 (блок 4a вычисления углового положения) вместе с данными, переданными из TPMS-датчика 2, или может быть сохранена заранее в TPMSCU 4.
[0042] Также, вместо времени начала передачи (времени t2 ~ t3) TPMS-данных также возможно вычислять угловое положение колеса 1 (число зубцов z в роторе) во время завершения приема (время t4). Т.е. время передачи TPMS-данных, Δt1 (=(t4-t3)) считается нулевым, угловое положение zt4 вычисляется посредством следующего уравнения (3), и оно используется в качестве опорного положения для определения степени дисперсии каждых данных углового положения для ID каждого датчика:
zt4=zt1+(zt5-zt1)×(t4-t1)/(t5-t1) --- (3)
В первом варианте осуществления, принимая во внимание время Δt1 передачи TPMS-данных, угловое положение zt2 может быть вычислено в соответствии с уравнением (1). Таким образом, угловое положение (число зубцов) каждого колеса в момент времени, в который угловое положение каждого TPMS-датчика достигло опорного значения (верхней точки), может быть вычислено, отражая фактическую ситуацию.
[0043] В первом варианте осуществления TPMS-датчик 2 (передатчик 2d) выполняет передачу в опорном положении (верхней точке). Как показано на фиг. 10 в качестве примера, угловое положение (угол поворота) передатчика 2d в колесе 1 имеет точку или область (или иногда их множество) (нулевую точку), в которой сила сигнала становится наименьшей. Когда опорное положение (верхняя точка), в котором передатчик 2d сконфигурирован, чтобы отправлять данные, находится поблизости от нулевой точки, приемнику 3 трудно принимать данные передачи. Следовательно, он может не иметь возможности идентифицировать угловое положение (опорное положение) колеса 1 во время передачи от TPMS-датчика 2 (передатчика 2d) на стороне кузова транспортного средства. Следовательно, могут возникать такие ситуации, в которых положение колеса TPMS-датчика 2 неточно оценивается в режиме автоматического обучения, или время для завершения оценки продлевается. Здесь, для того, чтобы улучшать вероятность приема, возможно дублировать данные TPMS-датчика 2 и передавать множество кадров одинакового содержимого. Однако множество кадров должны передаваться в разных угловых положениях. Следовательно, только посредством дублирования данных невозможно указывать, в каком угловом положении принятые данные были переданы, несмотря на улучшение в вероятности приема. Таким образом, существует недостаток в том, что угловое положение (число зубцов), предоставляющее эталон для определения положения колеса TPMS-датчика 2, не может быть идентифицировано на стороне кузова транспортного средства.
[0044] В отличие от этого в первом варианте осуществления TPMS-датчик 2 сконфигурирован, чтобы передавать множество данных (первый-третий кадры), включающих в себя собственное угловое положение (передатчика 2d). Более конкретно, как показано на фиг. 3(b), TPMS-датчик 2 дублирует TPMS-данные, чтобы создавать множество кадров одинакового содержимого (первый-третий кадры), и отправляет опорный кадр (первый кадр) в предварительно определенном угловом положении при каждой передаче TPMS-данных. Другими словами, первый кадр передается в предварительно определенном угловом положении (верхней точке), и угловое положение (верхняя точка) TPMS-датчика 2 во время передачи первого кадра устанавливается в качестве опорного положения для определения положения колеса.
Более конкретно, первый-третий кадры отправляются в предварительно определенном временном интервале или цикле (100 мс, 140 мс) и с присоединенным номером кадра (1-3), указывающим последовательность или порядок передачи.
Блок 4a вычисления углового положения, при приеме любого из первого-третьего кадров, оценивает опорное положение (верхнюю точку), в котором TPMS-датчик 2 передал первый кадр, т.е. число зубцов zt2.
Таким образом, используя дублированные данные TPMS-датчика 2, чтобы формировать множество кадров, даже если положение передачи первого кадра (верхняя или наивысшая точка) должно располагаться поблизости от нулевой точки, принимая другие кадры (второй или третий кадр), возможно улучшать вероятность приема. Отметим, что число кадров не ограничено тремя, а может быть двумя, четырьмя или более, например. Дополнительно, посредством включения информации об угловом положении (номера кадра) в каждый кадр, при любом приеме множества кадров, на основе этой принятой информации угловое положение (число зубцов zt2) при передаче из передатчика 2d может быть оценено. Следовательно, возможно обнаруживать точно угловое положение во время передачи из передатчика 2d каждого колеса 1 и определять положение колеса TPMS-датчика 2 во время передачи более точно. Следовательно, режим автообучения может быть завершен раньше.
[0045] Дополнительно, TPMS-датчик 2 отправляет опорный кадр (первый кадр) в предварительно определенном угловом положении (верхней точке), тогда как блок 4a вычисления углового положения оценивает предварительно определенное угловое положение (число зубцов zt2 в верхней точке) на основе информации о порядке передачи (номере кадра) принятого кадра (второй кадр, например). Другими словами, угловое положение для предоставления эталона для определения углового положения TPMS-датчика 2 на стороне кузова транспортного средства устанавливается в угловом положении (верхней точке), в котором TPMS-датчик 2 выводит первый кадр, и это угловое положение (число зубцов zt2), предоставляющее эталон, вычисляется на основе другого принятого кадра (второго, третьего кадра). Следовательно, упрощая конфигурацию TPMS-датчика 2, в то же время угловое положение TPMS-датчика 2 при передаче (число зубцов zt2) может быть оценено на кузове транспортного средства. Излагая другим способом, как описано ниже, в отличие от первого варианта осуществления, может быть понятно, что механизм оценки углового положения TPMS-датчика во время передачи каждого кадра устанавливается на колесе 1 (TPMS-датчик 2), и кузову транспортного средства передается информация, включающая в себя оцененное угловое положение для каждого кадра. При сравнении в первом варианте осуществления, без предоставления механизма оценки, описанного выше, включая в каждый кадр информацию о порядке передачи (номер кадра) в качестве информации об угловом положении, угловое положение (число зубцов zt2), которое представляет эталон для определения положения колеса TPMS-датчика 2, может быть идентифицировано на стороне кузова транспортного средства. Таким образом, конфигурация TPMS-датчика может быть упрощена, и может быть достигнуто уменьшение стоимости.
Отметим, что опорное положение для определения положения колеса (вычисление значения X дисперсионной характеристики) не ограничено угловым положением, в котором передается первый кадр, но может быть угловым положением передачи второго кадра или угловым положением передачи третьего кадра.
[0046] В случае, в котором интервал времени для передачи каждого кадра является одинаковым (например, когда интервал передачи между первым и вторым кадрами и интервал между вторым и третьим кадрами равны 100 мс), может возникать такая ситуация, в которой угловое положение, в котором каждый кадр задан, является одинаковым, нулевой точкой. Например, в случае, в котором первое положение передачи расположено поблизости от нулевой точки, и период вращения колеса 1 и период передачи каждого кадра синхронизированы друг с другом, положение передачи каждого кадра при каждом обороте колеса 1 соответствует окрестностям нулевой точки, так что существует вероятность того, что тот или иной кадр не принимается. В отличие от этого в первом варианте осуществления передатчик передает три или более кадров (первый-третий кадры) с разными временными интервалами (100 мс, 140 мс). Следовательно, возможно пресекать то, что период передачи каждого кадра и период вращения колеса 1 синхронизированы. Таким образом, ситуации, описанной выше, можно избежать, и вероятность приема будет улучшена.
[0047] Вместо информации о порядке (номере кадра) в качестве информации об угловом положении передатчика 2d при передаче кадра, которая должна быть включена в каждый кадр TPMS-датчиком 2, также может быть включена оценка углового положения передатчика 2d при передаче кадра.
Например, CU 2c датчика может вычислять угловое положение (угол поворота) передатчика 2d на основе составляющей гравитационного ускорения центробежного ускорения (величина или знаки или изменение направления составляющей, выбранного в каждом периоде вращения колеса 1), обнаруженного G-датчиком 2b, и добавляет это угловое положение к кадру, который должен быть передан. В этом случае блок 4a вычисления углового положения, при приеме любого из множества кадров, как и в первом варианте осуществления (в соответствии с вышеупомянутым уравнением (1), оценивает угловое положение (число зубцов) во время передачи принимаемого кадра на основе подсчитанных значений импульсов скорости вращения колеса и т.п., которые были введены непосредственно перед и непосредственно после приема принимаемого кадра, соответственно. Согласно соотношению соответствия между оцененным угловым положением (числом зубцов) и угловым положением, включенным в принятый кадр (числом зубцов, преобразованным из угла поворота), возможно определять положение колеса TPMS-датчика 2.
Для вышеописанного определения значение X дисперсионной характеристики, как и в первом варианте осуществления, может необязательно быть использовано. Дополнительно, необязательно предоставлять опорный кадр и отправлять угловое положение в предварительно определенном положении (верхней или наивысшей точке и т.д.). Достаточно отправлять каждый кадр в произвольном угловом положении. Другими словами, угловое положение TPMS-датчика 2 во время передачи каждого кадра может быть опорным положением для определения положения колеса. Интервал между кадрами (временной интервал или интервал в угловом положении) необязательно должен быть задан как предварительно определенное значение.
В первом варианте осуществления, во время режима автообучения, необходимо для передачи следующих TPMS-данных (опорного кадра) ожидать достижения собственным угловым положением предварительно определенного положения по прошествии времени в 16 секунд от времени передачи предыдущих TPMS-данных. В отличие от этого в вышеописанном примере для того, чтобы включать оценку углового положения в каждый кадр, возможно отправлять TPMS-данные (любой кадр), которые могут быть переданы в любом угловом положении непосредственно по прошествии 16 секунд времени от предыдущего времени передачи. Следовательно, в течение режима автообучения, в каждый момент времени передачи TPMS-данных данные для определения положения колеса TPMS-датчика 2 могут быть получены более быстро, так что положение колеса TPMS-датчика 2 может быть определено раньше.
[0048] Теперь описываются преимущества.
(1) В устройстве контроля давления в шине первого варианта осуществления достигаются преимущества, которые перечислены ниже.
Устройство контроля давления в шине для контроля давления воздуха каждой шины содержит:
механизм обнаружения давления в шине, установленный на шине каждого колеса 1 для обнаружения давления воздуха шины (датчик 2a давления);
передатчик 2d, установленный на каждом колесе для передачи информации о давлении воздуха в беспроводном сигнале с идентификационной информацией (ID датчика), уникальной для каждого передатчика 2d, включенной в этот беспроводной сигнал;
приемник 3, установленный на стороне кузова транспортного средства для приема беспроводного сигнала;
механизм обнаружения углового положения (датчик 8 скорости вращения колеса, ABSCU 6), установленный на кузове транспортного средства в соответствии с каждым колесом 1 для обнаружения углового положения (импульса скорости вращения колеса) каждого колеса 1 и вывода информации об угловом положении (значения счетчика импульсов скорости вращения колеса) в предварительно определенном временном интервале ΔT0 (периоде 20 мс) в линию связи (CAN-линию 7 связи);
механизм оценки углового положения на стороне кузова транспортного средства (блок 4a вычисления углового положения), установленный на кузове транспортного средства для оценки углового положения (числа зубцов) передатчика 2d во время передачи (время t2 команды передачи) на основе принятой беспроводным образом информации от передатчика 2d (время t4 завершения приема) и углового положения (числа зубцов zt1, zt5), введенного через линию связи (CAN-линию 7 связи),
механизм определения положения колеса (блок 4c определения положения колеса) для идентификации положения колеса 1 (FL-RR), на котором установлен передатчик 2d, на основе оцененного углового положения (числа зубцов zt2) и идентификационной информации (ID датчика), включенной в беспроводной сигнал.
Таким образом, пресекая увеличение стоимости посредством использования существующей системы, относительно каждого колеса, в то же время угловое положение (число зубцов zt2) во время передачи беспроводного сигнала от передатчика 2d может быть обнаружено более точно на стороне кузова транспортного средства, так что положение колеса TPMS-датчика 2 (передатчика 2d) может быть определено более точно. Следовательно, возможно завершать период автообучения раньше.
[0049] (2) Более конкретно, механизм оценки углового положения на стороне кузова транспортного средства (блок 4a вычисления углового положения) оценивает угловое положение (число зубцов zt2) во время передачи от передатчика 2d (время t2 команды передачи) на основе угловых положений колеса 1 (числа зубцов zt1, zt5), которые вводятся непосредственно перед началом приема (время t3) беспроводного сигнала от передатчика 2d и непосредственно после завершения приема (время t4) через линию связи (CAN-линию 7 связи), времени ввода углового положения этого колеса 1 t1, t5, вышеописанного времени t3 начала передачи или времени t4 завершения передачи.
Следовательно, возможно точно обнаруживать угловое положение (число зубцов zt2) во время передачи передатчика 2d на стороне кузова транспортного средства, так что положение колеса TPMS-датчика 2 (передатчика 2d) может быть определено более точно.
[0050] (3) Механизм оценки углового положения на стороне кузова транспортного средства (блок 4a вычисления углового положения) корректирует задержку Δt0 передачи передатчика 2d, включенную в принятую информацию беспроводного сигнала.
Следовательно, возможно обнаруживать угловое положение (число зубцов zt2) на стороне кузова транспортного средства более точно, так что положение колеса TPMS-датчика 2 (передатчика 2d) может быть определено более точно.
[0051] (4) Передатчик 2d передает беспроводной сигнал в двух экземплярах как множество кадров (первый-третий кадры), и механизм оценки углового положения на стороне кузова транспортного средства (блок 4a оценки углового положения) оценивает угловое положение (число зубцов zt2) при передаче передатчика 2d (время t2 команды передачи) на основе принятой информации из множества кадров (например, времени t4' завершения приема второго кадра и номера кадра).
Следовательно, улучшая вероятность приема посредством избегания нулевой точки, положение колеса TPMS-датчика 2 (передатчика 2d) может быть определено более точно.
[0052] (5) Передатчик 2d передает каждый кадр с интервалами относительно друг друга и вызывает включение информации об угловом положении (номер кадра) передатчика 2d в каждый кадр при передаче кадра.
Следовательно, возможно определять более точно положение колеса TPMS-датчика (передатчика 2d), в то же время улучшая вероятность приема.
[0053] (6) Каждое колесо 1 снабжено механизмом оценки углового положения (G-датчиком 2b, CU 2c датчика), который оценивает угловое положение передатчика 2d при передаче каждого кадра, и передатчик 2d может быть сконфигурирован, чтобы включать в каждый кадр оцененное угловое положение в качестве информации об угловом положении.
В этом случае, поскольку достаточно передавать каждый кадр в любом угловом положении, возможно определять положение колеса TPMS-датчика 2 (передатчика 2d) раньше.
[0054] (7) Передатчик 2d сконфигурирован, чтобы отправлять предварительно определенный опорный кадр (первый кадр, например) из множества кадров (первый-третий кадры) в предварительно определенном угловом положении (верхней точке), передает каждый кадр с предварительно определенным интервалом (интервалом времени 100 мс, 140 мс) и включает в качестве информации об угловом положении информацию о порядке передачи (номер кадра). Механизм оценки углового положения (блок 4a вычисления углового положения) оценивает предварительно определенное угловое положение, описанное выше (число зубцов в верхней точке zt2), на основе принятой информации (времени t4' завершения приема и номера кадра). Механизм определения положения колеса (блок 4c определения положения колеса, в свою очередь, определяет положение колеса 1 (FL-RR), на котором установлен или смонтирован передатчик 2d.
Т.е. информация о порядке передачи (номер кадра), присоединенная к каждому кадру (второму, третьему кадрам), указывает, совместно с информацией о предварительно определенном интервале (временном интервале 100 мс, 140 мс), информацию об угловом положении передатчика 2d во время передачи этого кадра (второго и третьего кадров). Таким образом, не нужно предусматривать механизм для оценки углового положения TPMS-датчика 2 (передатчика 2d) в каждом колесе 1 во время передачи каждого кадра, так что конфигурация может быть простой.
[0055] (8) Передатчик 2d передает каждый кадр (первый-третий кадры), размещенный с разными временными интервалами (100 мс, 140 мс) относительно друг друга.
Таким образом, механизм оценки углового положения на стороне кузова транспортного средства (блок 4а вычисления углового положения) может оценивать предварительно определенное угловое положение (число зубцов zt2) на основе принятой информации (времени t4 завершения приема и номера кадра).
[0056] (9) Передатчик 2d передает три или более кадров (первый-третий кадры) с разными временными интервалами (100 мс, 140 мс).
Следовательно, пресекая ситуацию, когда период вращения колеса 1 и период передачи каждого кадра синхронизированы и положение передачи каждого кадра соответствует окрестностям нулевой точки, возможно улучшать вероятность приема.
[0057] [Второй вариант осуществления]
Во втором варианте осуществления, в режиме передачи в постоянной или фиксированной позиции, TPMS-датчик 2 передает множество наборов данных (например, первый-четвертый кадры), включающие в себя собственную (т.е., передатчика 2d) информацию об угловом положении. Как показано на фиг. 11, TPMS-датчик 2 сконфигурирован, чтобы передавать один кадр (первый кадр) за одну передачу TPMS-данных в предварительно определенном положении (опорное положение = верхней или наивысшей точке) с предварительно определенным интервалом углового положения (например, 90 градусов), расположенным друг от друга. Кроме того, в других кадрах (втором-четвертом кадрах) передается информация об угловом положении передатчика 2d во время передачи соответствующего кадра. Более конкретно, TPMS-датчик 2 вызывает включение информации о порядке передачи (номер кадра) в каждый кадр. Блок 4a вычисления углового положения, при приеме любого из первого-четвертого кадров, на основе номера кадра и интервала углового положения (90 градусов) оценивает опорное положение (верхнюю точку), в котором TPMS-датчик 2 отправил первый кадр, т.е. число зубцов zt2.
Например, блок 4a вычисления углового положения вычисляет, когда принятый кадр оказывается третьим кадром, угловое положение (число зубцов), в котором третий кадр был отправлен, образом, аналогичным вышеприведенному уравнению (1). Вычитая интервал углового положения между первым и третьим кадрами (число зубцов ротора, соответствующее "90 градусов ×2"=180 градусов) из вычисленного углового положения (числа зубцов), чтобы вычислять предварительно определенное угловое положение, в котором первый кадр был передан.
Поскольку другие конфигурации являются аналогичными, их описание опущено.
[0058] Следовательно, возможно, как и в первом варианте осуществления, улучшая вероятность приема, точно оценивать положение колеса TPMS-датчика 2, чтобы раньше завершать режим автоматического обучения.
Впрочем, для того, чтобы улучшать вероятность приема, также возможно задавать межкадровый интервал углового положения разным или увеличивать число кадров.
Кроме того, в качестве информации об угловом положении, в каждый кадр включается оценка углового положения (посредством CU 2c датчика) передатчика 2d во время передачи этого кадра. В этом случае опорное положение для передачи первого кадра не ограничено конкретным угловым положением (таким как верхняя точка).
[0059] В устройстве контроля давления в шине во втором варианте осуществления могут быть получены следующие результаты.
(1) Передатчик 2d передает каждый кадр (первый-четвертый кадры) с предварительно определенным интервалом углового положения (90 градусов, например).
Таким образом, совместно с информацией о предварительно определенном интервале углового положения (90 градусов), информация о порядке передачи (номер кадра), добавленная к каждому кадру (второму, третьему кадрам), представляет информацию об угловом положении передатчика 2d во время передачи кадра (второго, третьего кадров). Следовательно, механизм оценки углового положения на стороне кузова транспортного средства (блок 4a вычисления углового положения) на основе принятой информации (времени t4' завершения приема и номера кадра) принятого кадра (например, второго кадра) из множества кадров может оценивать предварительно определенное угловое положение (число зубцов zt2 в верхней точке).
[0060] [Третий вариант осуществления]
В третьем варианте осуществления, в режиме передачи в фиксированной или постоянной позиции, каждый TPMS-датчик 2 сконфигурирован, чтобы передавать множество групп (первую-четвертую группы, например) множества кадров (первый-третий кадры, например), включающих в себя собственную (передатчика 2d) информацию об угловом положении, при каждой передаче TPMS-данных. В третьем варианте осуществления предоставляется набор из четырех групп, и каждая группа имеет первый-третий кадры, соответственно. Таким образом, число кадров, которые должны быть отправлены TPMS-датчиком 2, доходит до 12 (=4×3) в итоге.
Как показано на фиг. 12, TPMS-датчик 2 (передатчик 2d) передает, во множестве (четырех) предварительно определенных угловых положений (опорное положение для каждой группы), которые расположены с интервалами относительно друг друга, передает один кадр (первый кадр) соответствующей группы. Более конкретно, CU 2c датчика вычисляет, во время режима передачи в фиксированной позиции, угловое положение TPMS-датчика 2 (передатчика 2d) TPMS-датчика 2 на основе зависимой от гравитационного ускорения составляющей центробежного ускорения, обнаруженного посредством G-датчика 2b, передает первый кадр из первой группы в верхней точке ("0" градусов), передает первый кадр второй группы в самой задней точке (90 градусов), передает первый кадр третьей группы в самой низкой точке (180 градусов) и передает первый кадр четвертой группы в самой передней точке (270 градусов). TPMS-датчик 2, после передачи первого кадра для каждого кадра в опорном положении каждой группы (верхней или наивысшей точке, самой задней точке, самой низшей точке и самой передней точке), передает другие кадры той же группы (второй, третий кадры) тем же образом, что и в первом варианте осуществления. Т.е. с размещением с предварительно определенным временным интервалом (100 мс, 140 мс) будут переданы второй и третий кадры. Кроме того, присоединяется информация о группе, с которой ассоциирован кадр (номер группы или флаг, соответствующий опорному положению каждой группы).
[0061] Например, TPMS-датчик 2 передает первый кадр второй группы в опорном положении второй группы (самой задней точке при 90 градусах), передает второй кадр через 100 мс после этого, передает третий кадр через 140 мс после этого. Блок 4a вычисления углового положения, при приеме какого-либо одного из первого-третьего кадров второй группы, на основе его номера кадра (т.е., от одного до трех), и вышеупомянутого временного интервала (100 мс, 140 мс), оценивает опорное положение второй группы (самой задней точки), т.е. число зубцов zt2. Дополнительно, блок 4a вычисления углового положения, на основе номера группы, присоединенного к принятому кадру, преобразует опорное положение (число зубцов в самой задней точке) второй группы, описанной выше, т.е. число зубцов zt2, в опорное положение первой группы (число зубцов в наивысшей или верхней точке). Более конкретно, вычитая число зубцов, соответствующее интервалу углового положения между первой и второй группой (т.е., 90 градусов), из оцененного опорного положения (самой задней точки) второй группы, вычисляется число зубцов zt2 в опорном положении (верхней точке) первой группы.
При приеме кадров других групп (третьей, четвертой группы) число зубцов zt2 опорного положения первой группы (верхней точки) вычисляется аналогичным образом. Блок 4b вычисления дисперсии вычисляет значение X дисперсионной характеристики числа зубцов zt2 опорного положения (верхней точки). Т.е. со ссылкой на вычисленное опорное положение (верхнюю точку) первой группы определяется положение колеса TPMS-датчика 2.
Поскольку другие конфигурации являются такими же, что и в первом варианте осуществления, их описание опущено.
[0062] Теперь приводится описание процесса.
Нулевая точка не ограничена одним местоположением. Может быть множество ее местоположений. В последнем случае, как и в первом варианте осуществления, даже если передача каждого кадра имеет место с разными временными интервалами (100 мс, 140 мс), в зависимости от периода вращения (скорости вращения) колеса 1, другими словами, скорости транспортного средства, позиции передачи всех кадров соответствуют (множеству) окрестностям нулевых точек, так что может возникать ситуация, в которой кадр не принимается. В отличие от этого в третьем варианте осуществления, благодаря вышеописанной конфигурации, возникновения такой ситуации можно избежать. Таким образом, дополнительно улучшая вероятность приема кадра, угловое положение (число зубцов в опорном положении первой группы) может быть идентифицировано на стороне кузова транспортного средства более достоверно.
Отметим, что значение X дисперсионной характеристики числа зубцов в опорном положении может быть вычислено для каждой группы. В третьем варианте осуществления, преобразовывая все принятые данные в опорное положение первой группы (число зубцов в верхней точке), значительная разница в значении X дисперсии собственного колеса и других колес может быть создана быстрее. Следовательно, возможно оценивать положение колеса TPMS-датчика 2 более точно в течение короткого времени. Отметим, что опорное положение для определения положения колеса (вычисления значения дисперсионной характеристики) может быть не ограничено опорным положением (верхней точкой) первой группы, а может собираться или объединяться в опорное положение (самую заднюю точку) другой группы (второй группы, например).
[0063] TPMS-датчик 2 (передатчик 2d), как и во втором варианте осуществления, может быть сконфигурирован, чтобы передавать кадры каждой группы (первый-третий кадры) с предварительно определенными интервалами углового положения. Дополнительно, TPMS-датчик 2 может быть сконфигурирован, чтобы предоставлять предварительно определенные угловые положения (опорные положения каждой группы), в которых первый кадр передается для каждой группы, и размещенные с предварительно определенным временным интервалом. В этом случае также, посредством вычитания числа зубцов, соответствующего предварительно определенному интервалу времени, может быть вычислено число зубцов в опорном положении первой группы (верхней точке). В третьем варианте осуществления, поскольку опорные положения каждой группы предусмотрены с предварительно определенным интервалом углового положения относительно друг друга, вычисление может быть сделано простым.
Кроме того, в качестве информации об угловом положении, которая должна быть включена в каждый кадр, может быть включено оценочное значение углового положения передатчика 2d во время передачи этого кадра (посредством CU 2c датчика). В этом случае, опорное положение, в котором передается первый кадр каждой группы, не ограничивается конкретным угловым положением (верхней точкой и т.д.).
Дополнительно, число групп не ограничено четырьмя, а может быть 2, 3, 5 или другим числом.
[0064] В устройстве контроля давления в шине третьего варианта осуществления достигаются преимущества, которые перечислены ниже.
(1) Передатчик 2d передает множество кадров (первый-третий кадры) во множестве групп (первой-четвертой группах) и передает, в предварительно определенном угловом положении (верхней или наивысшей точке, самой задней или конечной точке, самой низшей точке и передней точке), предусмотренном для каждой группы с предварительно определенным интервалом (90 градусов), опорный кадр каждой группы (первый кадр, например).
Следовательно, возможно улучшать вероятность приема и идентифицировать более достоверно угловое положение (число зубцов в опорном положении первой группы) в качестве критерия положения колеса передатчика 2d.
[0065] (2) Передатчик 2d включает информацию о группе (номер группы) в каждый кадр (первый-третий кадры), указывающую, какой группе кадр принадлежит. Механизм оценки углового положения на кузове транспортного средства (блок 4a вычисления углового положения) оценивает предварительно определенное угловое положение (число зубцов в верхней точке) для предварительно определенной опорной группы (первой группы, например) среди множества групп (первой-четвертой групп) на основе предварительно определенного углового положения (числа зубцов в самой задней точке) группы, к которой кадр оценивается принадлежащим (второй группе, например), относительно принятого кадра и информации о группе (номера группы). Дополнительно, механизм определения положения колеса (блок 4c определения положения колеса) определяет положение колеса 1, на котором передатчик 2d размещен или установлен, на основе предварительно определенного положения (числа зубцов в верхней точке) оцененной опорной группы (первой группы).
Таким образом, преобразуя все принятые данные в опорное положение (число зубцов zt2 в верхней точке) опорной группы (первой группы), положение колеса передатчика 2d может быть оценено точно в более коротком периоде времени.
[0066] [Другие варианты осуществления]
В то время как лучшие варианты осуществления описаны, чтобы реализовывать настоящее изобретение, конкретная конфигурация не ограничена этими вариантами осуществления. Наоборот, изменение конструкции или модификации, которые не отступают от сущности настоящего изобретения, могут быть включены в настоящее изобретение.
Например, в вариантах осуществления показан пример, использующий датчик скорости вращения колеса в качестве механизма обнаружения углового положения. Однако в транспортном средстве, снабженном электродвигателем, встроенным в колесо, в качестве источника мощности, угол поворота может быть обнаружен с помощью датчика положения вала электродвигателя.
Описание ссылочных позиций
[0067] 1 колесо
2a датчик давления (механизм обнаружения давления в шине)
2d передатчик
3 приемник
4a блок вычисления углового положения (механизм оценки углового положения на стороне кузова транспортного средства)
4c блок определения положения колеса (механизм определения положения колеса)
6 ABSCU (механизм обнаружения углового положения)
7 CAN-линия связи (линия связи)
8 датчик скорости вращения колеса (механизм обнаружения углового положения)
Реферат
Изобретение относится к устройствам контроля давления в шине для контроля давления каждой шины транспортного средства. Устройство содержит: передатчик, установленный на каждом колесе для передачи обнаруженной информации о давлении воздуха в беспроводном сигнале; механизм обнаружения углового положения (датчик скорости вращения колеса), расположенный на стороне кузова транспортного средства, соответствующий каждому колесу, и который обнаруживает угловое положение (импульс скорости вращения колеса) каждого колеса, а также выводит информацию об угловом положении (значение счетчика импульсов скорости вращения колеса) в линию связи с предварительно определенными временными интервалами (цикл 20 мс); и механизм оценки углового положения на стороне кузова транспортного средства (блок вычисления углового положения), который оценивает угловое положение (число зубцов) во время передачи (время (t2) команды передачи) передатчиками на основе информации о приеме (времени (t4) завершения приема) для беспроводного сигнала от передатчиков и информации об угловом положении (времена ввода (t1, t5), число зубцов для колес, введенной через линию связи. Технический результат - повышение точности обнаружения углового положения передатчика каждого колеса для контроля давления в шинах транспортного средства. 3 н. и 9 з.п. ф-лы, 12 ил.
Формула
механизм обнаружения давления в шине, установленный на шине каждого колеса для обнаружения давления воздуха шины;
передатчик, установленный на каждом колесе для передачи информации о давлении воздуха в беспроводном сигнале с идентификационной информацией, уникальной для каждого передатчика, включенной в беспроводной сигнал;
приемник, установленный на стороне кузова транспортного средства для приема беспроводного сигнала;
механизм обнаружения углового положения, установленный на кузове транспортного средства в соответствии с каждым колесом для обнаружения углового положения каждого колеса и вывода информации об угловом положении с предварительно определенным интервалом времени в линию связи;
механизм оценки углового положения на стороне кузова транспортного средства, установленный на кузове транспортного средства для оценки углового положения передатчика во время передачи на основе принятой информации от передатчика и информации об угловом положении колеса, введенной через линию связи, и
механизм определения положения колеса для идентификации положения колеса, на котором установлен передатчик, на основе оцененного углового положения и идентификационной информации, включенной в беспроводной сигнал, при этом механизм оценки углового положения на стороне кузова транспортного средства сконфигурирован, чтобы оценивать угловое положение во время передачи из передатчика на основе угловых положений колеса, которые вводятся непосредственно перед началом приема беспроводного сигнала от передатчика и непосредственно после завершения приема, соответственно введенных через линию связи, времени ввода углового положения колеса и времени начала приема или времени завершения приема.
механизм оценки углового положения на стороне кузова транспортного средства корректирует задержку передачи передатчика, включенную в принятую информацию беспроводного сигнала.
передатчик отправляет беспроводной сигнал в двух экземплярах как множество кадров, и механизм оценки углового положения на стороне кузова транспортного средства оценивает угловое положение при передаче передатчика на основе принятой информации из множества кадров.
в котором передатчик передает каждый кадр с интервалами относительно друг друга и вызывает включение информации об угловом положении передатчика в каждый кадр при передаче кадра.
передатчик сконфигурирован, чтобы отправлять предварительно определенный опорный кадр из множества кадров в предварительно определенном угловом положении, передает каждый кадр с предварительно определенным интервалом и включает в качестве информации об угловом положении информацию о порядке передачи, при этом
механизм оценки углового положения оценивает предварительно определенное угловое положение на основе принятой информации среди множества кадров, и при этом
механизм определения положения колеса определяет положение колеса, на котором установлен передатчик.
передатчик передает каждый кадр с разными интервалами времени, разнесенными друг от друга.
передатчик передает три или более кадров, чтобы передавать каждый кадр с разным временным интервалом.
передатчик передает каждый кадр с предварительно определенным интервалом углового положения.
механизм обнаружения давления в шине, установленный на шине каждого колеса для обнаружения давления воздуха шины;
передатчик, установленный на каждом колесе для передачи информации о давлении воздуха в беспроводном сигнале с идентификационной информацией, уникальной для каждого передатчика, включенной в беспроводной сигнал;
приемник, установленный на стороне кузова транспортного средства для приема беспроводного сигнала;
механизм обнаружения углового положения, установленный на кузове транспортного средства в соответствии с каждым колесом для обнаружения углового положения каждого колеса и вывода информации об угловом положении колеса с предварительно определенным интервалом времени в линию связи;
механизм оценки углового положения на стороне кузова транспортного средства, установленный на кузове транспортного средства для оценки углового положения передатчика во время передачи на основе принятой информации от передатчика и информации об угловом положении колеса, введенной через линию связи, и
механизм определения положения колеса для идентификации положения колеса, на котором установлен передатчик, на основе оцененного углового положения и идентификационной информации, включенной в беспроводной сигнал, при этом передатчик формирует беспроводной сигнал в двух экземплярах как множество кадров, чтобы передавать предварительно определенный опорный кадр среди множества кадров в предварительно определенном угловом положении, в то же время передавая каждый кадр с интервалами относительно друг друга, и вызывать включение информации об угловом положении передатчика в каждый кадр при передаче кадра; при этом
механизм оценки углового положения на стороне кузова транспортного средства оценивает предварительно определенное угловое положение на основе принятой информации среди множества кадров,
механизм определения положения колеса определяет положение колеса, на котором установлен передатчик, на основе оцененного предварительно определенного углового положения; и при этом
передатчик сконфигурирован, чтобы передавать множество кадров во множестве групп, в то же время передавая опорный кадр каждой группы в предварительно определенных угловых положениях, предусмотренных для каждой группы с предварительно определенным интервалом относительно друг друга.
передатчик включает в каждый кадр информацию о группе, указывающую, какой группе кадр принадлежит,
механизм оценки углового положения на стороне кузова транспортного средства оценивает предварительно определенное угловое положение для предварительно определенной опорной группы среди множества групп на основе предварительно определенного углового положения группы, к которой кадр оценен принадлежащим относительно принятого кадра и информации о группе, и механизм определения положения колеса определяет положение колеса, на котором установлен передатчик, на основе предварительно определенного углового положения оцененной опорной группы.
механизм обнаружения давления в шине, установленный на шине каждого колеса для обнаружения давления воздуха шины;
передатчик, установленный на каждом колесе для передачи информации о давлении воздуха в беспроводном сигнале с идентификационной информацией, уникальной для каждого передатчика, включенной в беспроводной сигнал;
приемник, установленный на стороне кузова транспортного средства для приема беспроводного сигнала;
механизм обнаружения углового положения, установленный на кузове транспортного средства в соответствии с каждым колесом для обнаружения углового положения каждого колеса и вывода информации об угловом положении с предварительно определенным интервалом времени в линию связи;
механизм оценки углового положения на стороне кузова транспортного средства, установленный на кузове транспортного средства для оценки углового положения передатчика во время передачи на основе времени приема беспроводного сигнала от передатчика, информации об угловом положении колеса, введенной через линию связи, и времени ввода информации об угловом положении; и
механизм определения положения колеса для идентификации положения колеса, на котором установлен передатчик, на основе оцененного углового положения и идентификационной информации, включенной в беспроводной сигнал.
Комментарии