Приводной передаточный механизм и струйное записывающее устройство - RU2416525C1
Код документа: RU2416525C1
Чертежи
Описание
Настоящее изобретение относится к приводному передаточному механизму, который использует планетарный зубчатый механизм. Настоящее изобретение также относится к струйному записывающему устройству, которое подает чернила на среду для записи, таким образом, выполняя запись посредством использования такого приводного передаточного механизма.
До настоящего времени были известны записывающие устройства, которые включают в себя механизм подачи для подачи листа в качестве среды для записи в его внутреннюю часть, передаточный механизм для перемещения поданного листа, записывающий механизм для записи данных или изображений на поданном листе и выводной механизм для выдачи записанного листа на наружную сторону записывающего устройства. Записывающие устройства также содержат источник движения для приведения в движение соответствующих механизмов и приводного передаточного механизма.
Среди таких записывающих устройств струйные записывающие устройства включают в себя записывающую головку в качестве записывающего механизма и подают чернила на лист, таким образом записывая на него данные или изображения. Многие струйные записывающие устройства оснащены механизмом для восстановления головки, содержащим всасывающий насос для поддержания нормального состояния подачи чернил записывающей головки или восстановления нормального состояния подачи чернил в случаях забивания отверстий для подачи чернил.
Как описано выше, множество разных механизмов установлено в записывающем устройстве, и источники движения, такие как электродвигатели, установлены для приведения в действие соответствующих механизмов, когда необходимо. Во многих случаях такое записывающее устройство содержит механизм переключения передачи движения для селективной передачи движущей силы одного источника движения множеству механизмов. Известная конструкция механизма переключения передачи движения использует планетарный зубчатый механизм. Использование планетарного зубчатого механизма дает возможность уменьшить количество источников движения или количество приводных элементов. В результате струйное записывающее устройство может быть изготовлено по низкой цене и небольшого размера, и его надежность может быть повышена посредством упрощения механизмов.
Например, известна конструкция, которая использует планетарный зубчатый механизм, так что один из двух разных пунктов назначения передачи движения выбирается между правым вращательным движением и левым вращательным движением (ссылка должна быть сделана, например, на японский патент № 2628686). Однако указанная конструкция не может надлежащим образом выполнять передачу движения, если имеется больше двух пунктов назначения передачи движения. Кроме того, в указанной конструкции вращающая движущая сила в одном направлении может передаваться в один пункт назначения передачи движения. Однако вращающая движущая сила в двух направлениях, как в правом, так и в левом направлениях вращения, не может передаваться в один пункт назначения передачи движения.
Кроме того, известна конструкция, в которой используется планетарный зубчатый механизм, который вращается в правом направлении вращения, обеспечивая вращение планетарной шестерни, и который вращается в левом направлении вращения, передавая движущую силу в пункт назначения передачи движения, так что движущая сила может передаваться в два или более пункта назначения передачи движения (ссылка должна быть сделана, например, на японскую выложенную патентную заявку № 2002-310260). Однако в указанной конструкции только вращающая движущая сила в одном направлении может передаваться в один пункт назначения передачи движения.
Кроме того, известна конструкция, в которой используется дополнительный источник движения, такой как соленоид, исключительно для механизма переключения передачи движения (ссылка должна быть сделана, например, на японский патент № 2855580). Конструкция обеспечивает состояние, в котором планетарная шестерня может свободно вращаться, и состояние, в котором вращательное движение ограничено для переключения между ними, так что движущая сила как в правом, так и в левом направлениях может передаваться в более чем два пункта назначения передачи движения. Однако для указанной конструкции необходимо наличие источника движения только для механизма переключения передачи движения и детектора, такого как датчик для регистрации углового положения планетарной шестерни.
Кроме того, если количество пунктов назначения передачи движения увеличено, то угол поворота планетарной шестерни при установке в исходное состояние углового положения планетарной шестерни увеличивается. В результате, необходимо время для поворота планетарной шестерни, и, таким образом, время, необходимое для завершения операции переключения передачи движения, увеличивается.
Целью настоящего изобретения является создание приводного передаточного механизма и струйного записывающего устройства, обеспечивающего быструю операцию переключения и повышение надежности операции переключения с помощью механизма переключения передачи движения.
В соответствии с аспектом настоящего изобретения описан приводной передаточный механизм, включающий в себя источник движения, способный генерировать вращающую движущую силу, и приводной передаточный узел, способный передавать вращающую движущую силу источника движения. Приводное передаточное устройство дополнительно включает в себя механизм переключения передачи движения, содержащий солнечную шестерню, планетарную шестерню и планетарный рычаг, способный поддерживать планетарную шестерню для свободного поворота вокруг солнечной шестерни, причем механизм переключения передачи движения способен селективно переключать вращающую движущую силу с приводного передаточного узла во множество пунктов назначения передачи движения. Кроме того, приводное передаточное устройство включает в себя множество ведущих входных шестерен, способных передавать вращающую движущую силу, переданную от механизма переключения передачи движения в пункты назначения передачи движения; зажимное устройство, способное переключать состояние вращения планетарной шестерни между состоянием свободного вращения, в котором вращающая движущая сила солнечной шестерни передается планетарному рычагу, так что планетарный рычаг способен поворачиваться, и состоянием ограниченного вращения, в котором вращающая движущая сила солнечной шестерни не передается планетарному рычагу, так что планетарный рычаг не способен поворачиваться; и узел переключения состояния вращения, способный приводить в действие зажимное устройство посредством перемещения планетарной шестерни в осевом направлении центра вращения, таким образом, переключая между состоянием ограниченного вращения и состоянием свободного вращения. В состоянии ограниченного вращения планетарная шестерня зацепляется с ведущей входной шестерней, и зажимное устройство не способно передавать вращающую движущую силу. В состоянии свободного вращения планетарная шестерня расцепляется с ведущей входной шестерней, и зажимное устройство способно передавать вращающую движущую силу. Механизм переключения передачи движения содержит первую и вторую опорные части, которые выполнены с возможностью вхождения в контакт с планетарным рычагом, поворачиваемым в состоянии свободного вращения, для установки в исходное состояние углового положения планетарной шестерни. Механизм переключения передачи движения способен выбирать одну из первой и второй опорных частей, которая будет входить в контакт с планетарным рычагом в соответствии с положением ведущей входной шестерни, передающей вращающую движущую силу, среди множества ведущих входных шестерен.
В соответствии с другим аспектом настоящего изобретения описаны приводное передаточное устройством, включающее в себя источник движения, способный генерировать вращающую движущую силу, и приводной передаточный узел, способный передавать вращающую движущую силу источника движения. Приводное передаточное устройство дополнительно включает в себя механизм переключения передачи движения, содержащий солнечную шестерню, планетарную шестерню и планетарный рычаг, способный поддерживать планетарную шестерню для свободного вращения вокруг солнечной шестерни, причем механизм переключения передачи движения способен селективно переключать вращающую движущую силу с приводного передаточного узла во множество пунктов назначения передачи движения. Кроме того, приводное передаточное устройство включает в себя множество ведущих входных шестерен, способных передавать вращающую движущую силу, переданную от механизма переключения передачи движения в пункты назначения передачи движения; зажимное устройство, способное переключать состояние вращения планетарной шестерни между состоянием свободного вращения, в котором вращающая движущая сила солнечной шестерни передается планетарному рычагу, так что планетарный рычаг способен поворачиваться, и состоянием ограниченного вращения, в котором вращающая движущая сила солнечной шестерни не передается планетарному рычагу, так что планетарный рычаг не способен поворачиваться; и узел переключения состояния вращения, способный приводить в действие зажимное устройство посредством перемещения планетарной шестерни в осевом направлении центра вращения, таким образом, переключая между состоянием ограниченного вращения и состоянием свободного вращения. В состоянии свободного вращения планетарная шестерня отсоединяется от солнечной шестерни и ведущей входной шестерни, зажимной механизм способен передавать вращающую движущую силу, и узел переключения состояния вращения перемещается в первое положение, в котором он входит в контакт с механизмом переключения передачи движения. В состоянии ограниченного вращения планетарная шестерня зацепляется с солнечной шестерней и ведущей входной шестерней, соответственно, зажимное устройство не способно передавать вращающую движущую силу, и узел переключения состояния вращения перемещается во второе положение, в котором он отсоединяется от механизма переключения передачи движения. Планетарная шестерня имеет состояние готовности вращения, в котором планетарная шестерня зацепляется с солнечной шестерней ведущей входной шестерней, соответственно, зажимное устройство не способно передавать вращающую движущую силу, и узел переключения состояния вращения перемещается в третье положение, расположенное между первым положением и вторым положением.
В соответствии с аспектами настоящего изобретения, поскольку первая и вторая опорные части предназначены для установки в исходное состояние углового положения планетарной шестерни, опорная часть, которая приводится в контакт с планетарным рычагом, таким образом устанавливая в исходное состояние угловое положение, может быть выбрана из двух опорных частей в соответствии с положением ведущей входной шестерни, передающей движущую силу. Благодаря такой конструкции могут быть обеспечены более быстрая операция переключения передачи движения и повышение ее надежности.
Другие признаки настоящего изобретения станут понятными из нижеследующего описания примеров осуществления со ссылкой на прилагаемые чертежи, на которых:
Фиг.1 - перспективный вид, иллюстрирующий упрощенную конструкцию струйного записывающего устройства.
Фиг.2 - вид в разрезе, иллюстрирующий упрощенную конструкцию струйного записывающего устройства.
Фиг.3 - перспективный вид, иллюстрирующий механизм переключения передачи движения.
Фиг.4 - перспективный вид, иллюстрирующий нейтральное положение механизма переключения передачи движения.
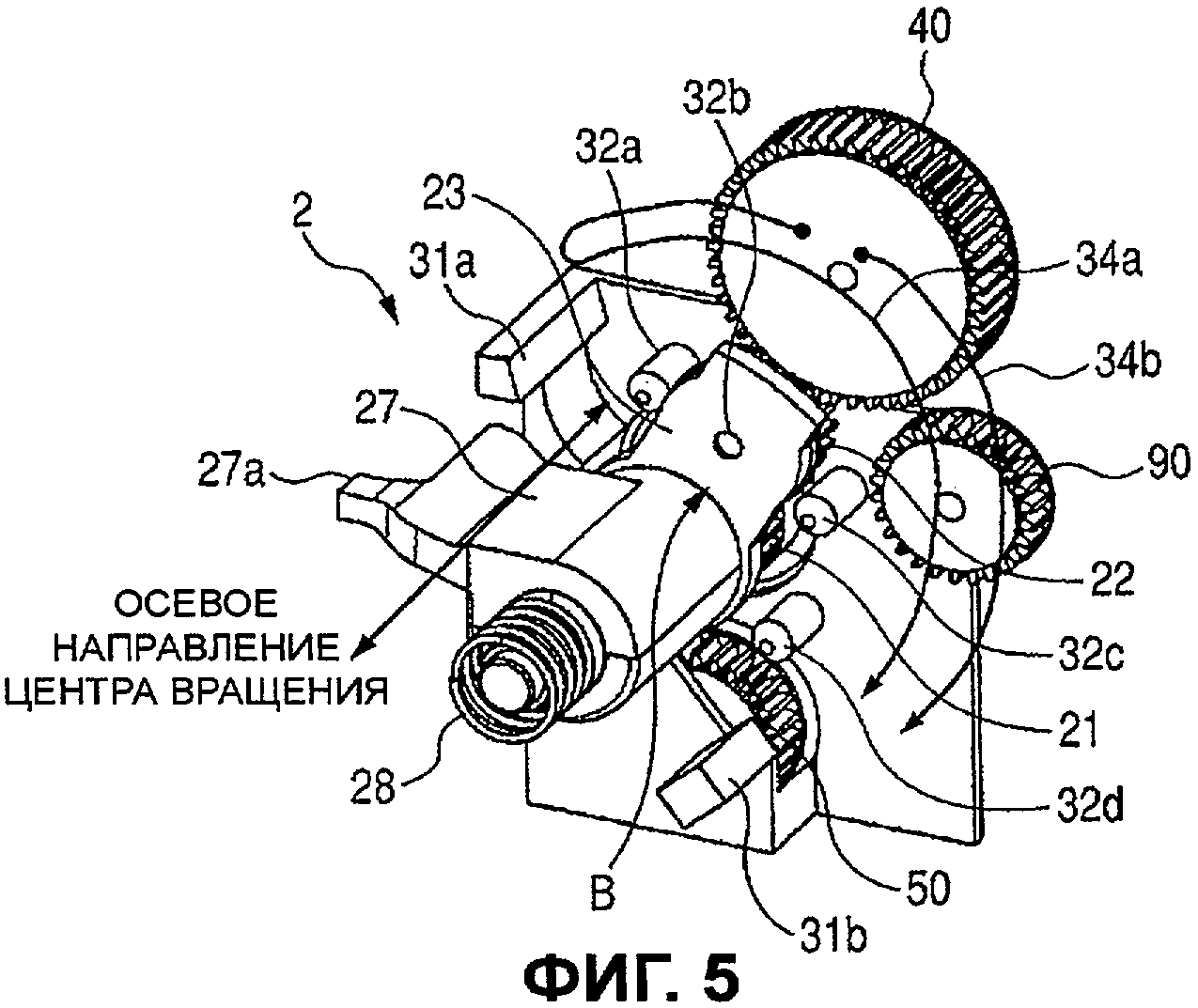
Фиг.5 - перспективный вид, иллюстрирующий положение подачи механизма переключения передачи движения.
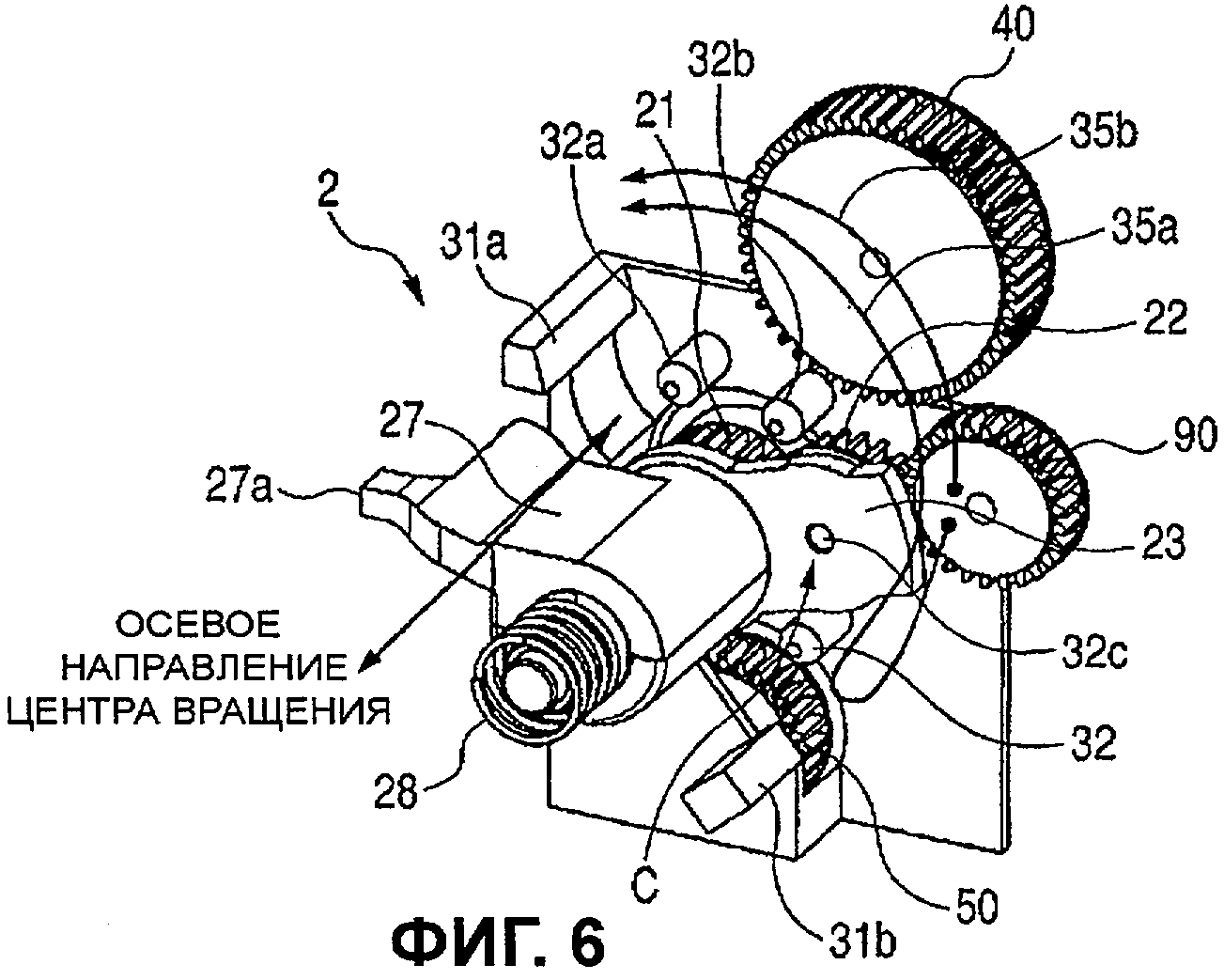
Фиг.6 - перспективный вид, иллюстрирующий положение восстановления головки механизма переключения передачи движения.
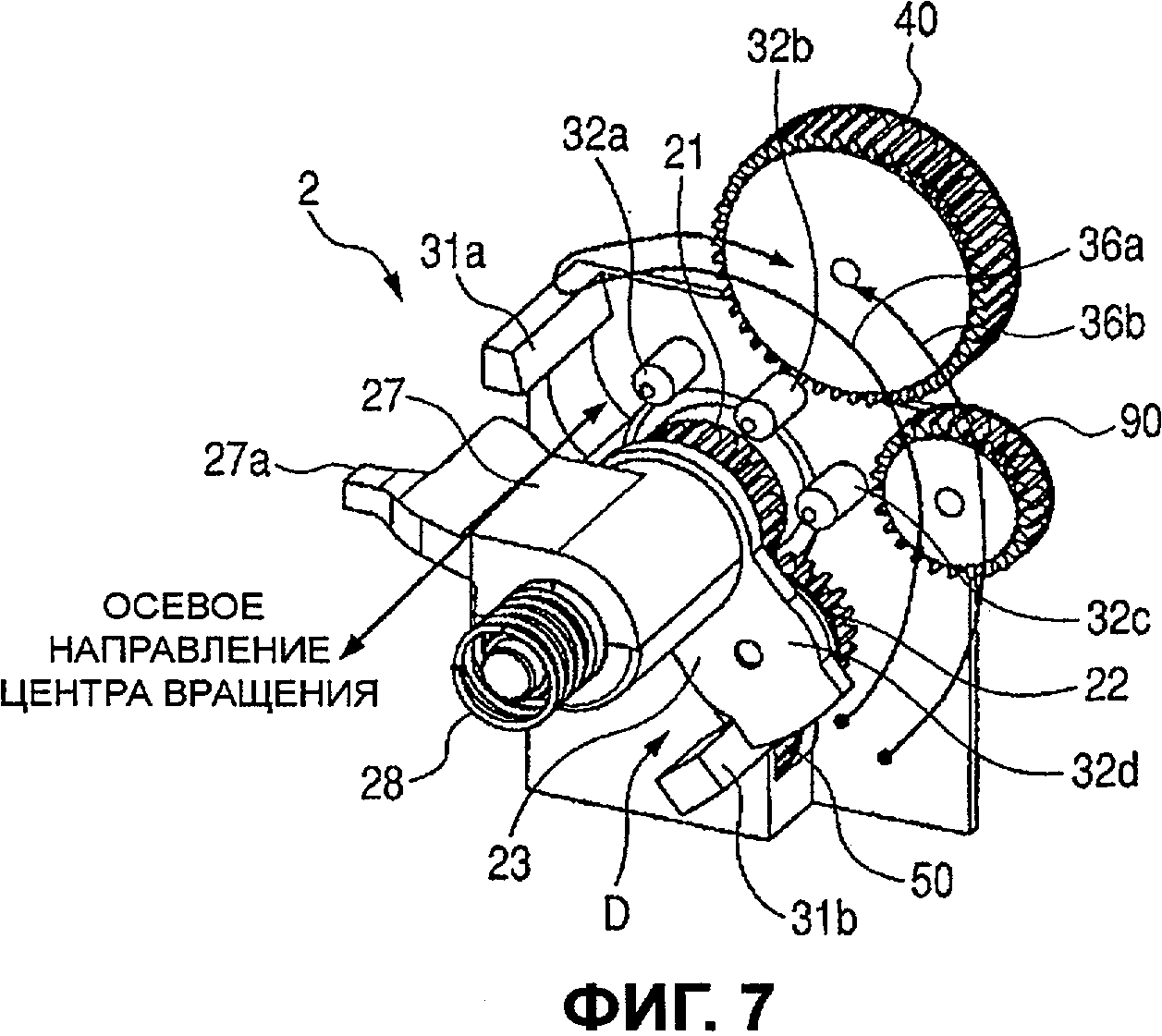
Фиг.7 - перспективный вид, иллюстрирующий положение подачи в кассете механизма переключения передачи движения.
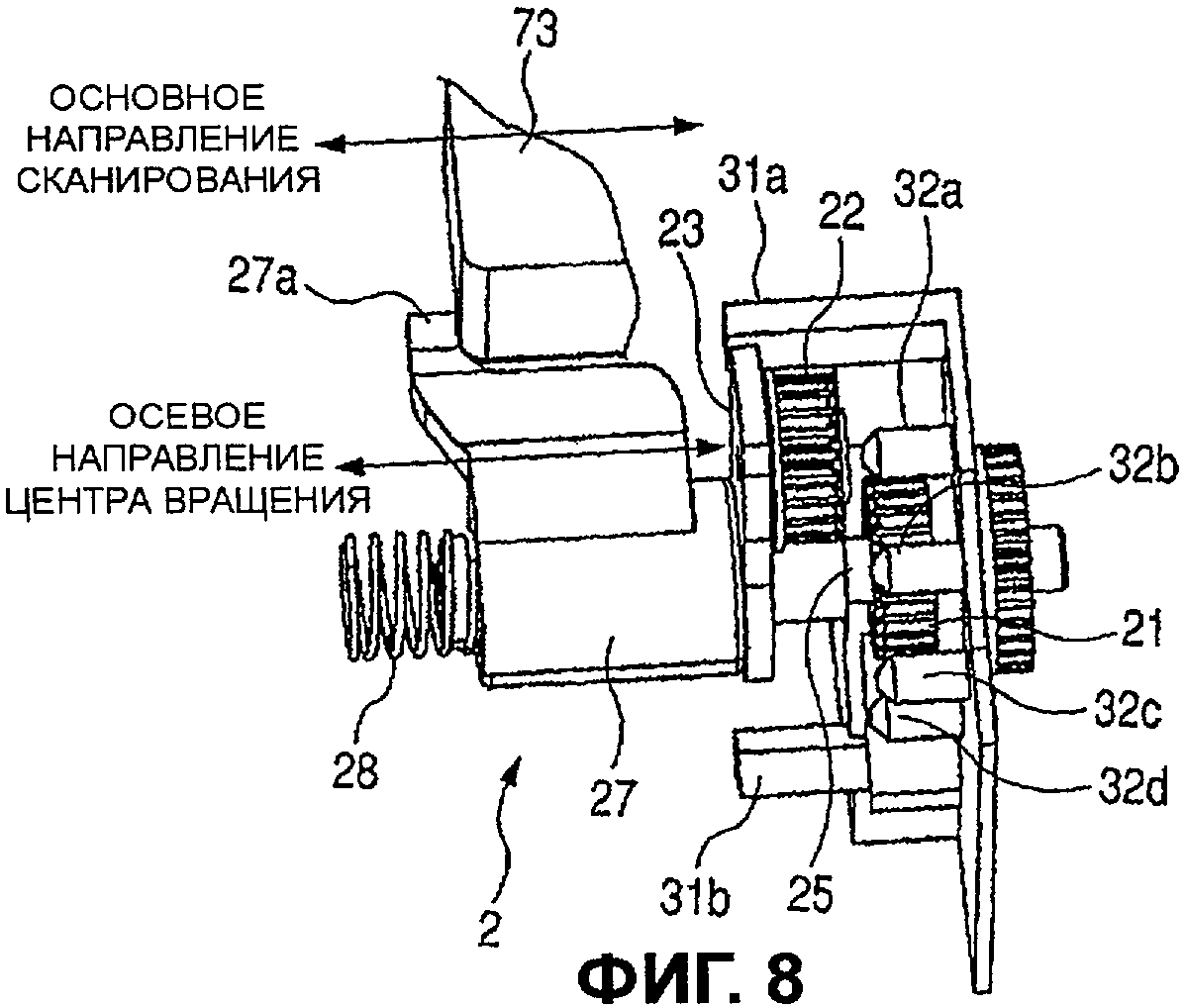
Фиг.8 - перспективный вид, иллюстрирующий состояние, в котором планетарный рычаг входит в контакт с первым поворотным опорным ребром в механизме переключения передачи движения.
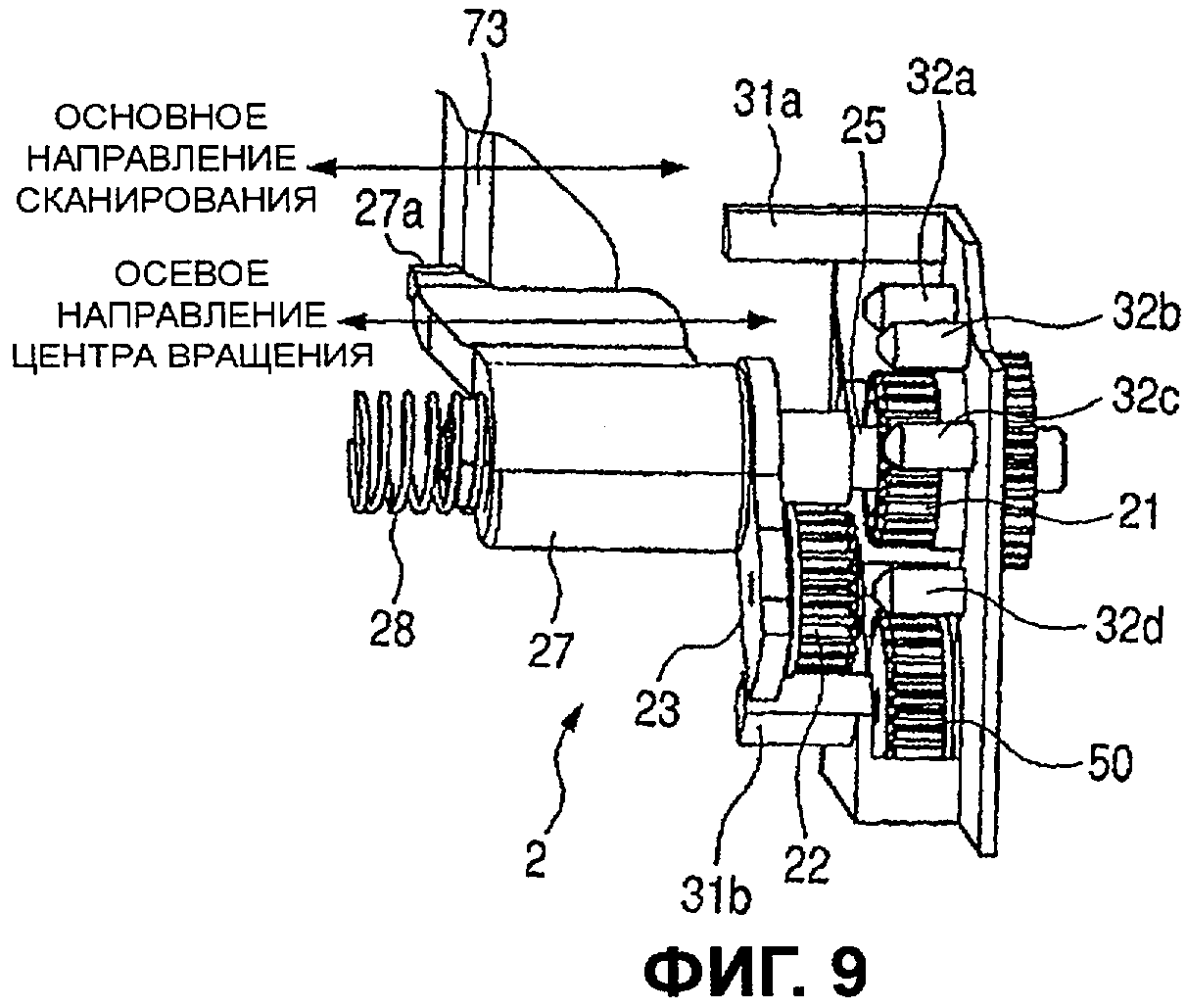
Фиг.9 - перспективный вид, иллюстрирующий состояние, в котором планетарный рычаг входит в контакт со вторым поворотным опорным ребром в механизме переключения передачи движения.
Фиг.10 - блок-схема управления струйного записывающего устройства.
Фиг.11 - схема последовательности операций для описания операции записи струйного записывающего устройства.
Фиг.12 - схема последовательности операций для описания операции переключения передачи движения в положение подачи в соответствии с первым примером осуществления.
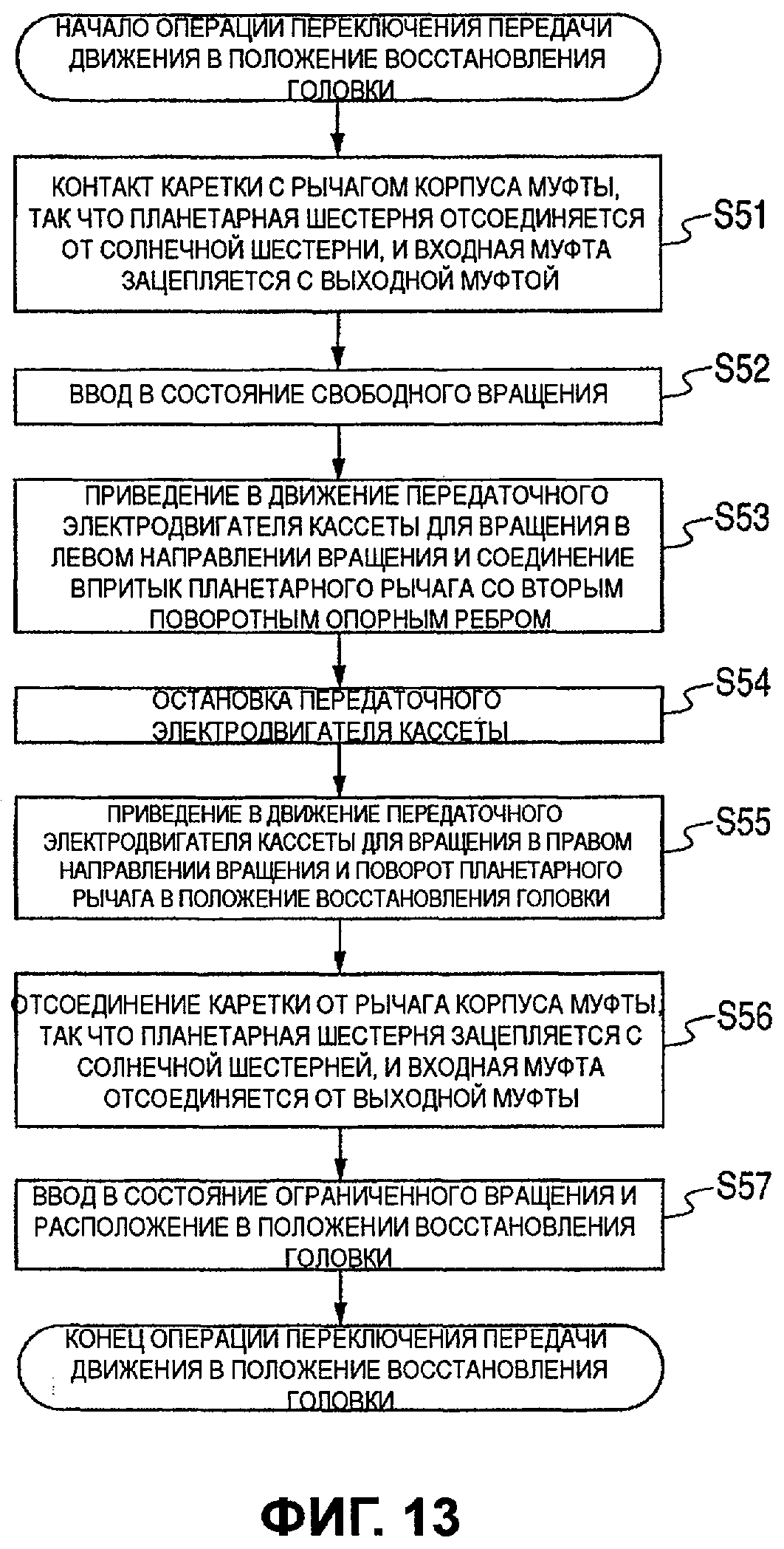
Фиг.13 - схема последовательности операций для описания операции переключения передачи движения в положение восстановления головки в соответствии с первым примером осуществления.
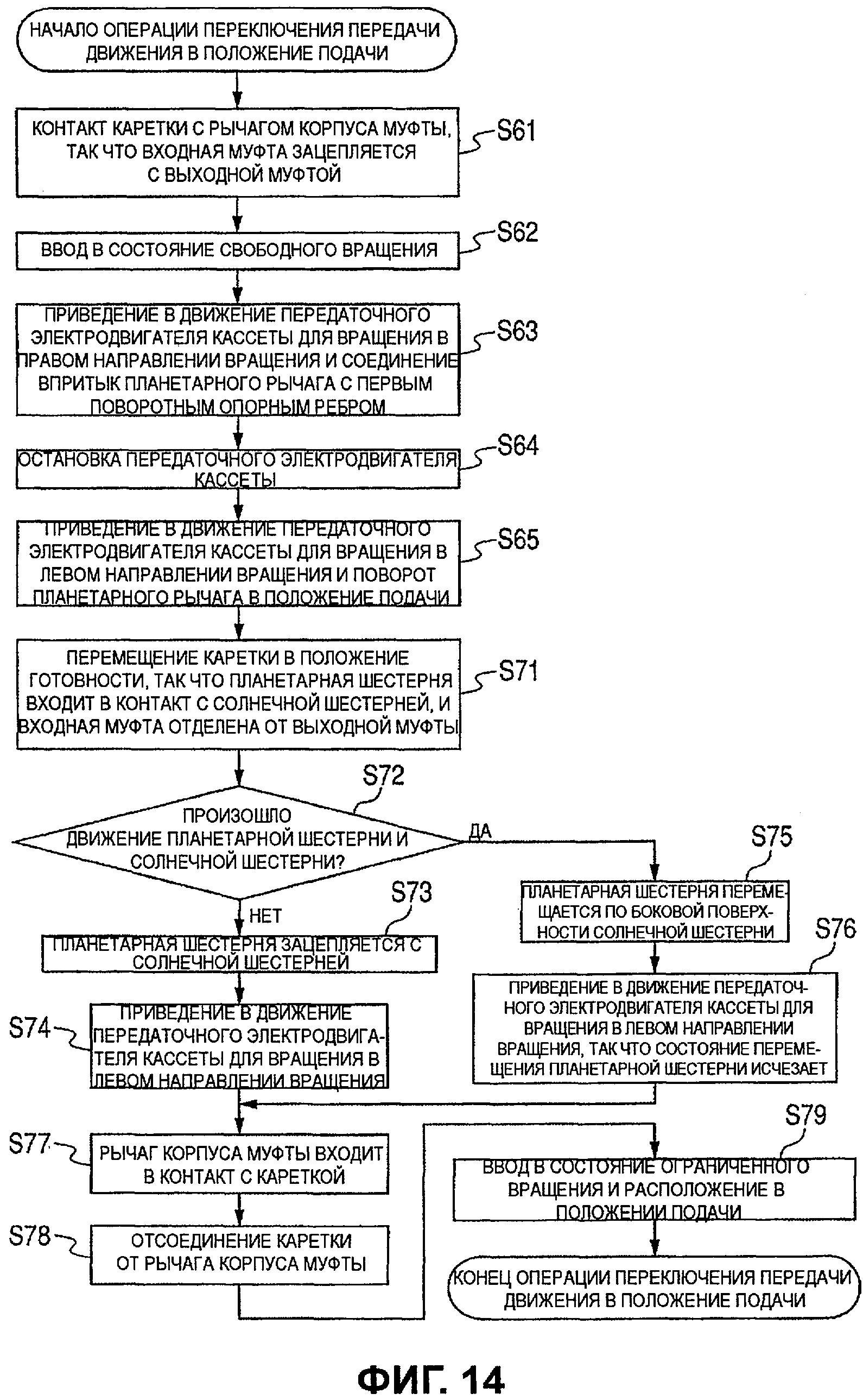
Фиг.14 - схема последовательности операций для описания операции переключения передачи движения в положение подачи в соответствии со вторым примером осуществления.
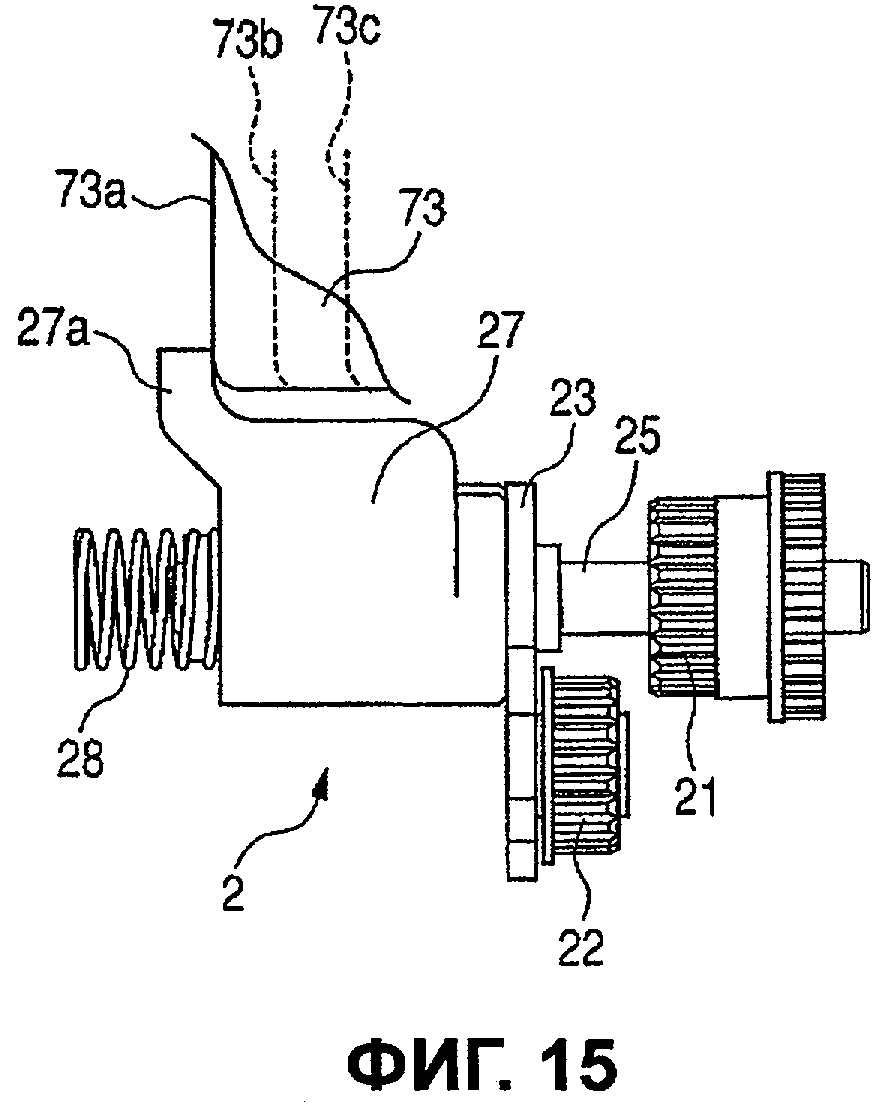
Фиг.15 - вид сверху, иллюстрирующий состояние свободного вращения механизма переключения передачи движения.
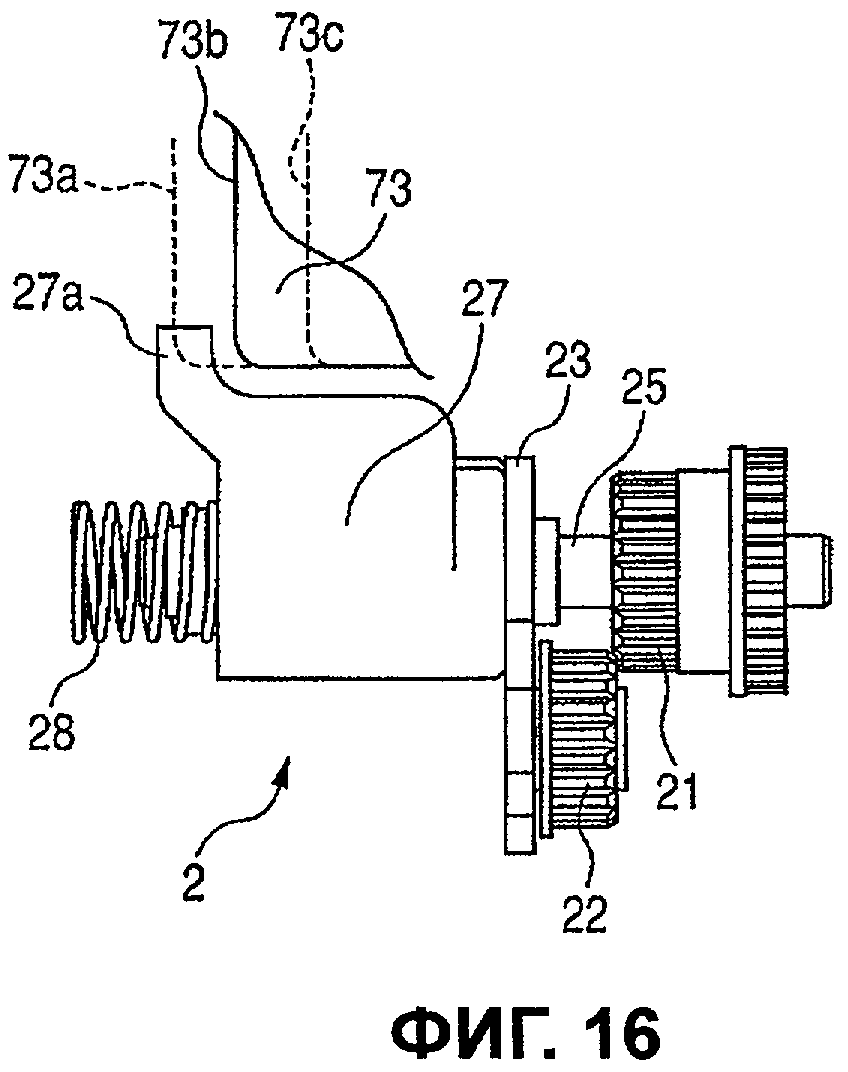
Фиг.16 - вид сверху, иллюстрирующий состояние, в котором планетарная шестерня перемещается по солнечной шестерне в механизме переключения передачи движения.
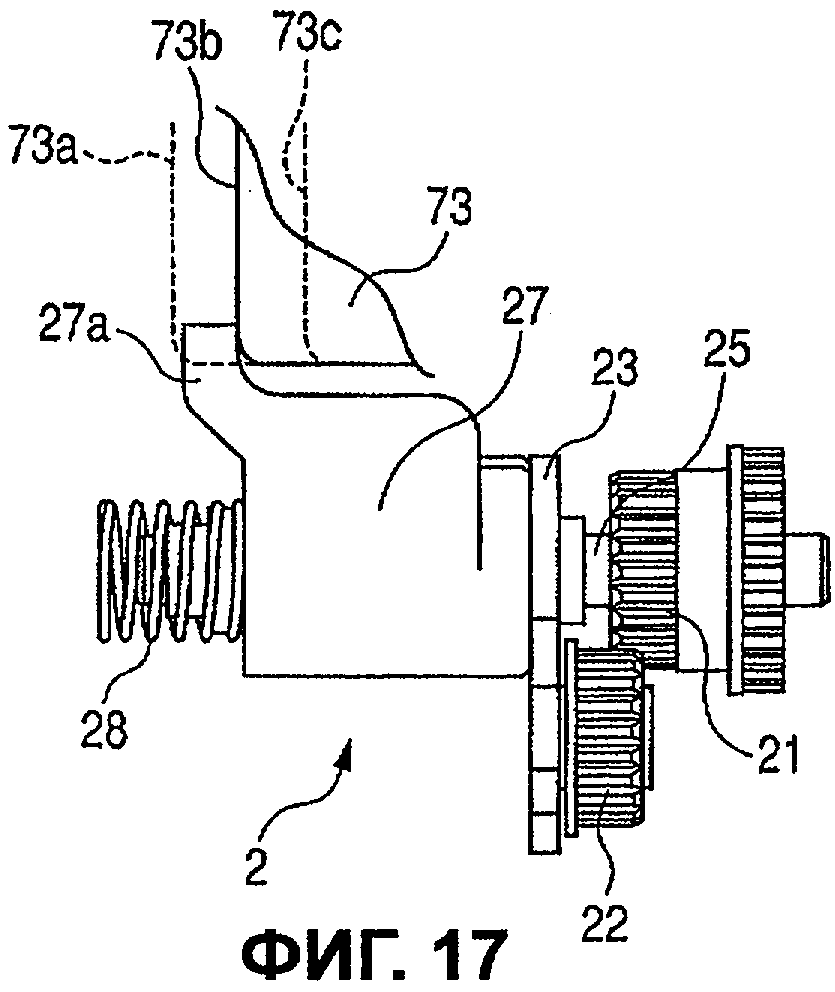
Фиг.17 - вид сверху, иллюстрирующий состояние, в котором состояние перемещения планетарной шестерни по солнечной шестерне исключено в механизме переключения передачи движения.
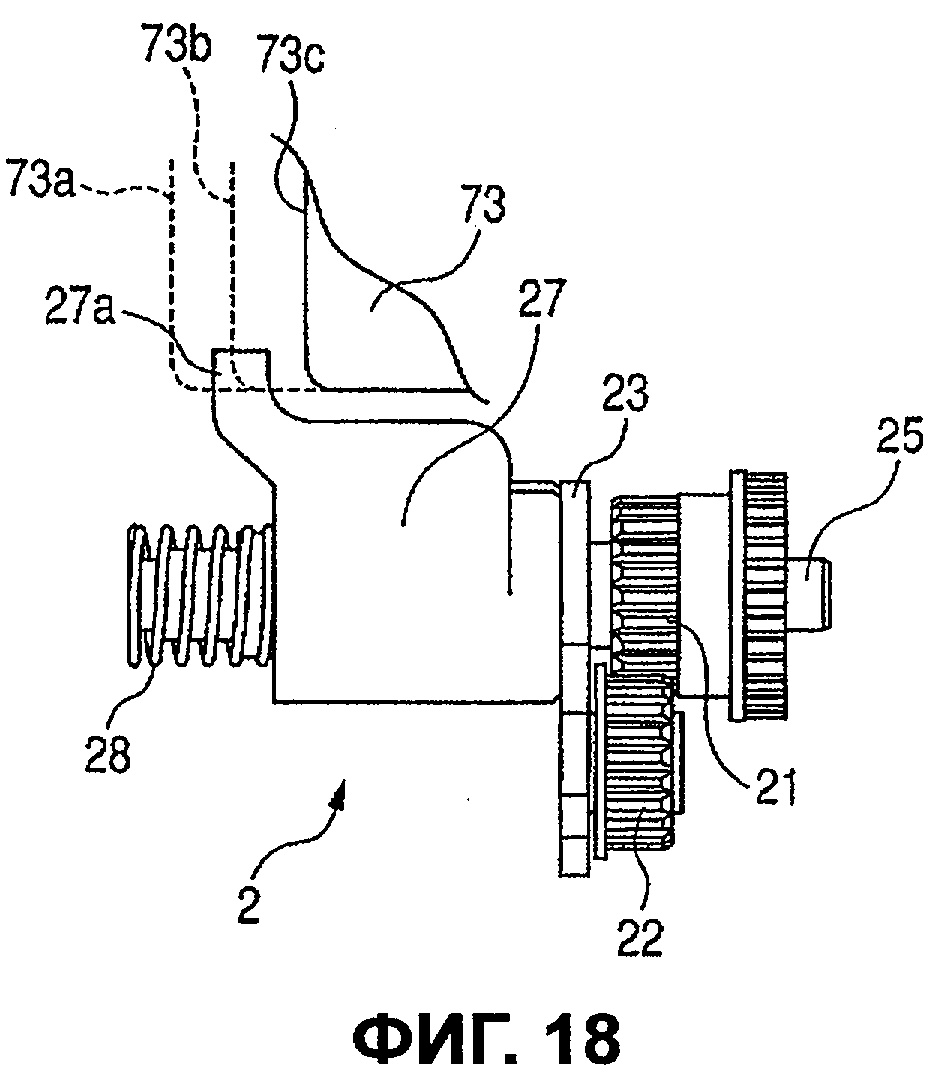
Фиг.18 - вид сбоку, иллюстрирующий состояние ограниченного вращения механизма переключения передачи движения.
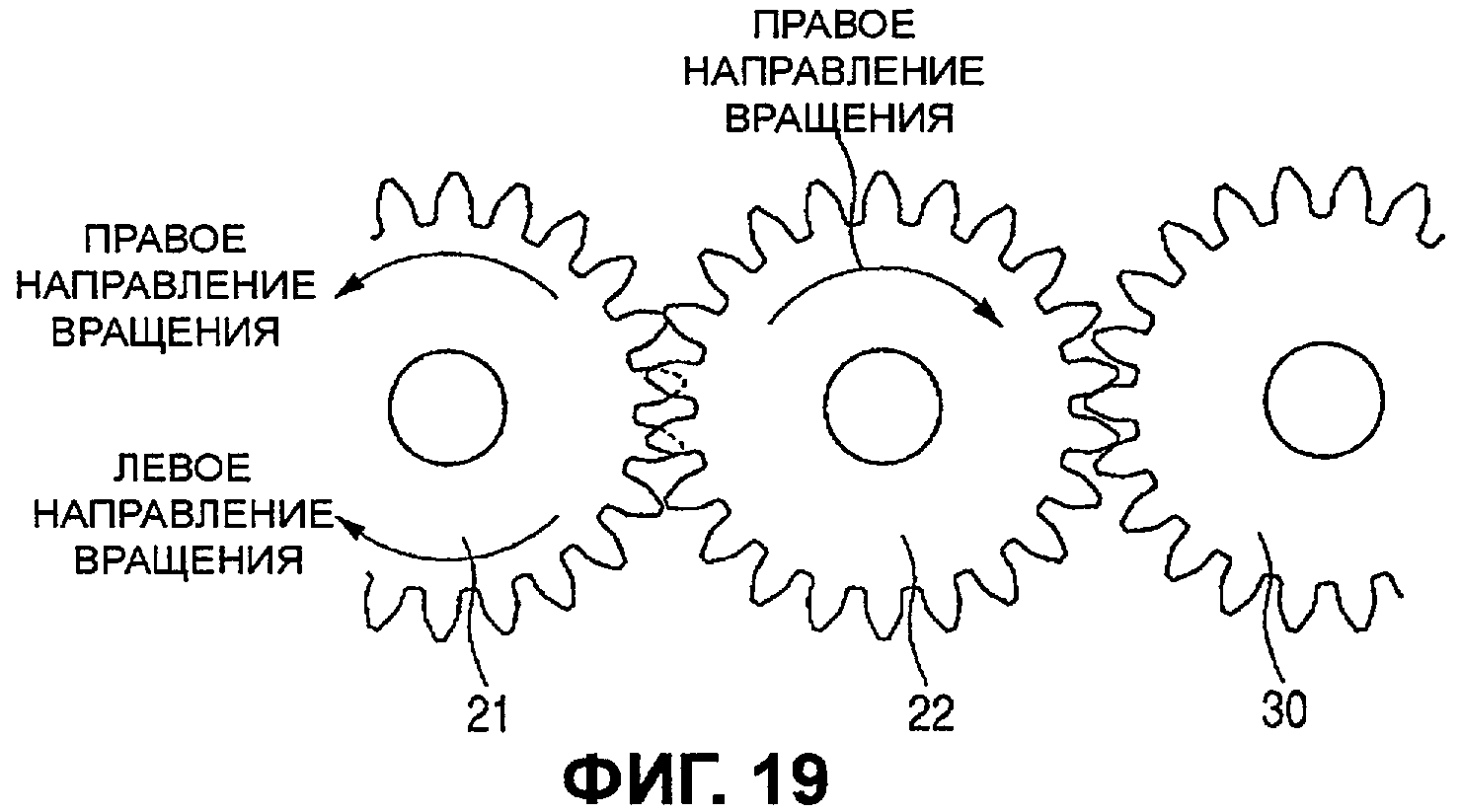
Фиг.19 - схематический вид, иллюстрирующий состояние, в котором планетарная шестерня перемещается по солнечной шестерне.
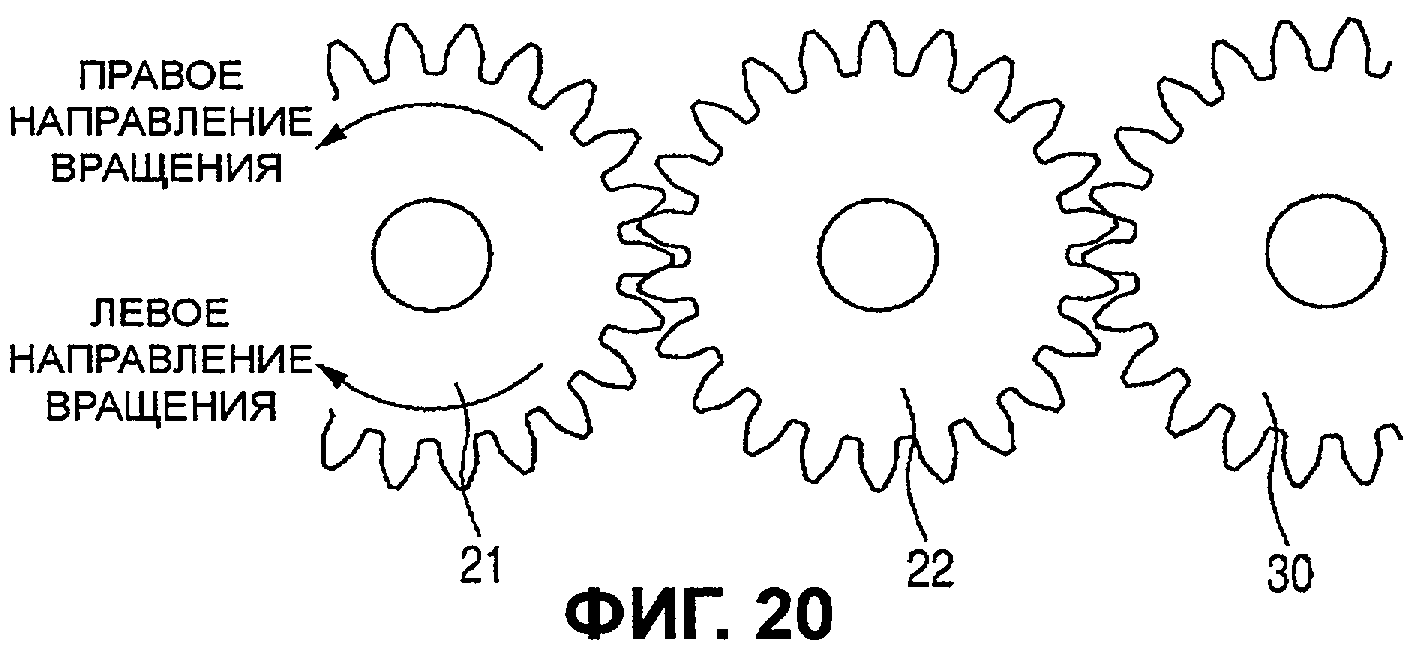
Фиг.20 - схематический вид сверху, иллюстрирующий состояние, в котором состояние перемещения планетарной шестерни по солнечной шестерне исключено.
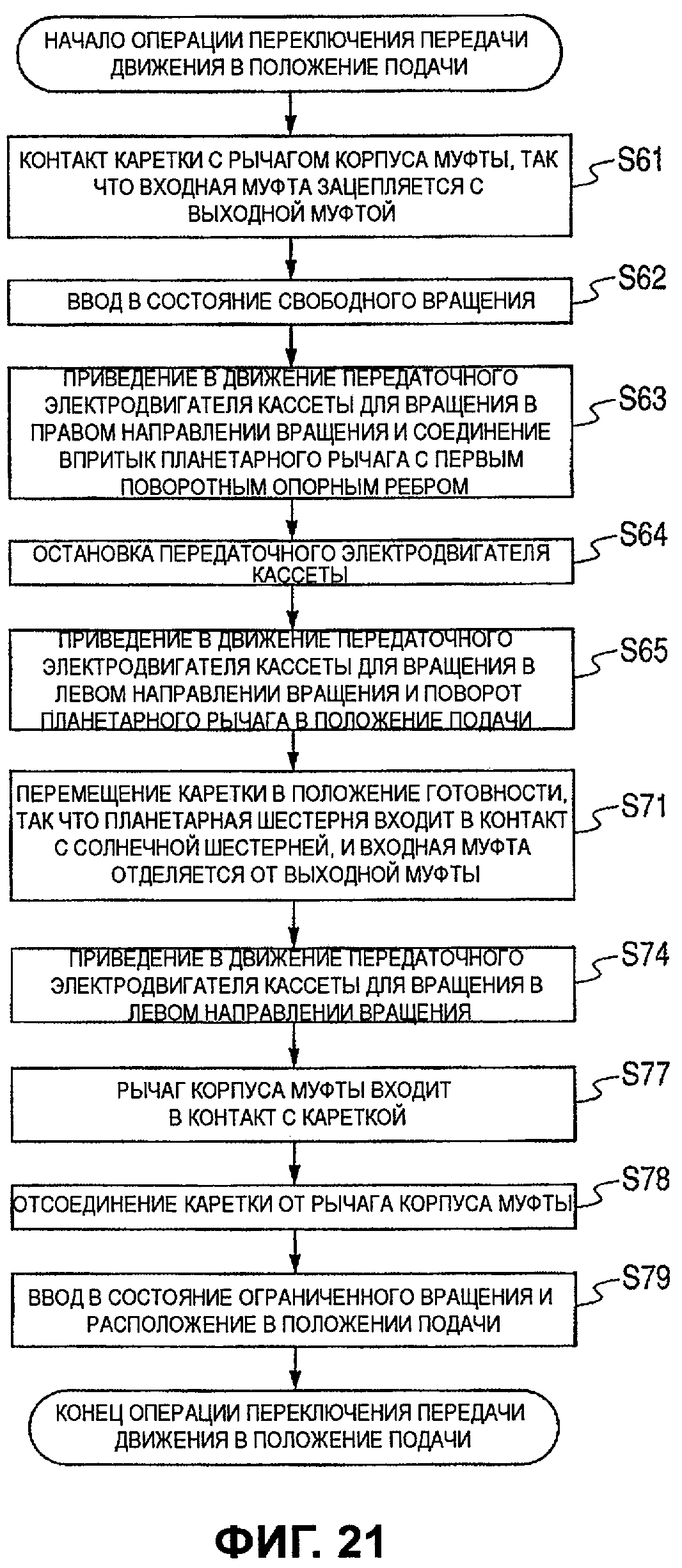
Фиг.21 - схему последовательности операций, показывающую, что передаточный электродвигатель кассеты приведен в действие в левом направлении вращения в любых случаях без регистрации или определения, перемещается ли планетарная шестерня по солнечной шестерне. Этапы S61-S65 на фиг.21 аналогичны этапам S61-S65 на фиг.14.
Примеры осуществления настоящего изобретения будут описаны со ссылкой на чертежи.
Первый пример осуществления
Будет дано описание струйного записывающего устройства с установленным в нем приводным передаточным механизмом в соответствии с первым примером осуществления.
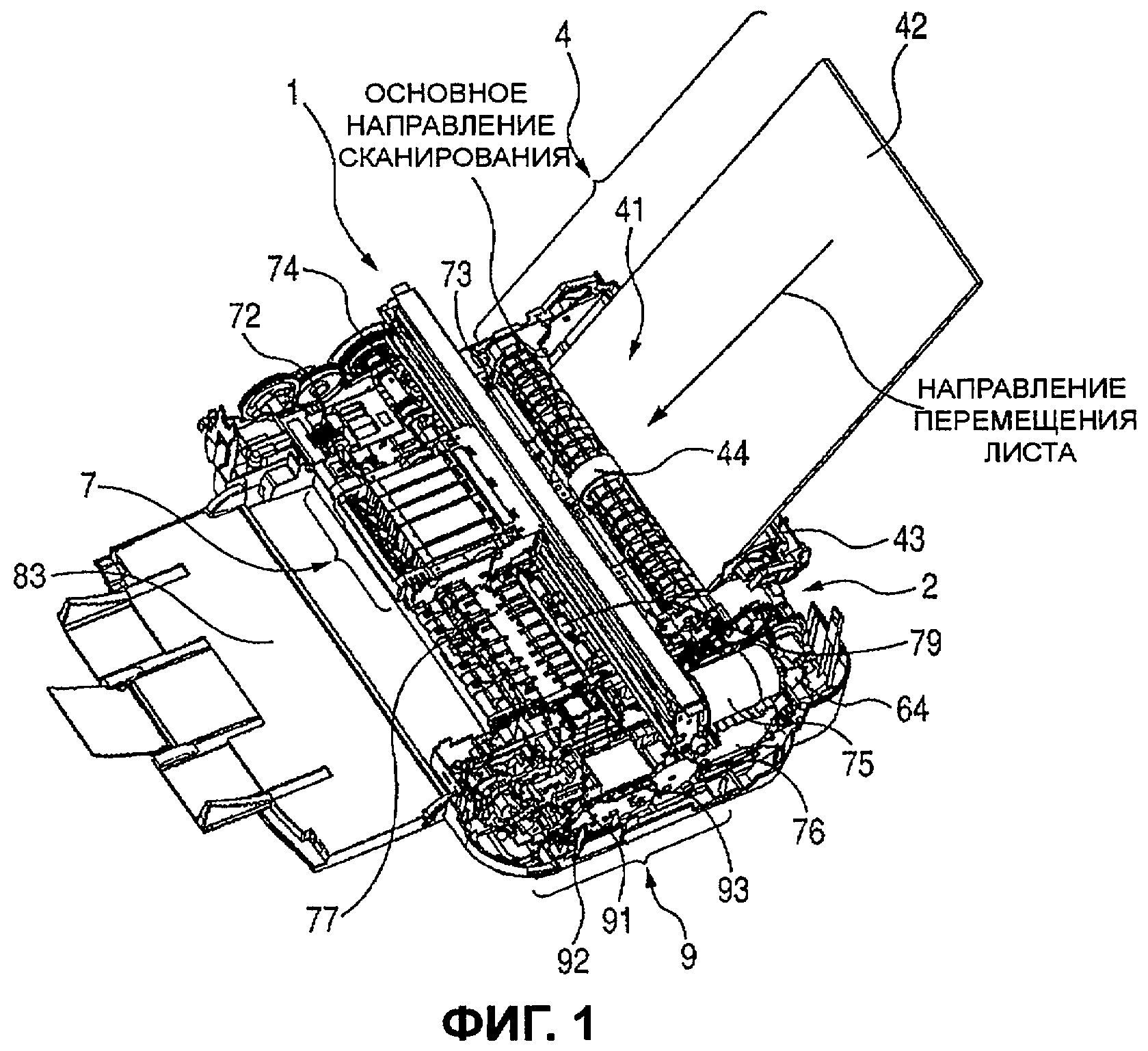
Прежде всего, описание упрощенной конструкции струйного записывающего устройства 1 будет дано со ссылкой на фиг.1 и 2. Фиг.1 изображает перспективный вид, иллюстрирующий упрощенную конструкцию струйного записывающего устройства, и фиг.2 изображает вид в разрезе, иллюстрирующий упрощенную конструкцию струйного записывающего устройства.
Листы 42 в качестве среды для записи складываются в стопку и помещаются в отверстие 41 для подачи механизма 4 подачи. Листы 42 складываются в стопку на прижимную пластину 43, которая расположена в нижней части отверстия 41 для подачи. Подающий ролик 44 расположен на противоположной стороне прижимной пластины 43, и прижимная пластина 43 поджимается по направлению к подающему ролику 44 с помощью непроиллюстрированной пружины прижимной пластины. Листоотделяющий ролик 45 также поджимается по направлению к подающему ролику 44 с помощью непроиллюстрированной пружины листоотделяющего ролика. Траектория листа вниз по потоку от листоотделяющего ролика 45 в направлении перемещения сходится в описанный ниже канал 64 кассеты для перемещения листа, который соединяется с описанным ниже записывающим механизмом 7.
В записывающем механизме 7 записывающая головка 71 установлена на каретке 73, и непроиллюстрированные отверстия для подачи чернил образованы на нижней поверхности записывающей головки 71. На противоположной стороне отверстий для подачи чернил бумагоопорный валик 77 расположен с заданным зазором между ними. Левый передний ролик 78 расположен вверх по потоку к бумагоопорному валику 77 в направлении перемещения листа 42, и левый передний прижимной ролик 79 поджимается по направлению к левому переднему ролику 78 непроиллюстрированной пружиной. Кроме того, выводной ролик 81 расположен вниз по потоку от бумагоопорного валика 77 в направлении перемещения, и прямозубое зубчатое колесо 82 поджимается по направлению к выводному ролику 81 непроиллюстрированной пружиной. Кроме того, разгрузочный лоток 83 расположен дальше вниз по потоку от выводного ролика 81 в направлении перемещения.
Емкость 72 для чернил также установлена на каретке 73 вместе с записывающей головкой 71, так что чернила подаются из емкости 72 для чернил в записывающую головку 71. Движущая сила электродвигателя 75 каретки передается записывающей головке 71 через ремень 76 каретки, который является зубчатым ремнем привода. Благодаря такой конструкции каретка 73 может совершать возвратно-поступательное движение вдоль направляющей 74 каретки в основном направлении сканирования (то есть, направлении, вертикально пересекающем направление перемещения листа 42).
Механизм 9 для восстановления головки расположен снаружи диапазона основного сканирования для записи данных или изображений на листе 42, и крышка 91 расположена на механизме 9 для восстановления головки параллельно бумагоопорному валику 77. Всасывающий насос 92 соединен с крышкой 91 с помощью непроиллюстрированной трубки. Очищающее устройство 93 расположено около крышки 91.
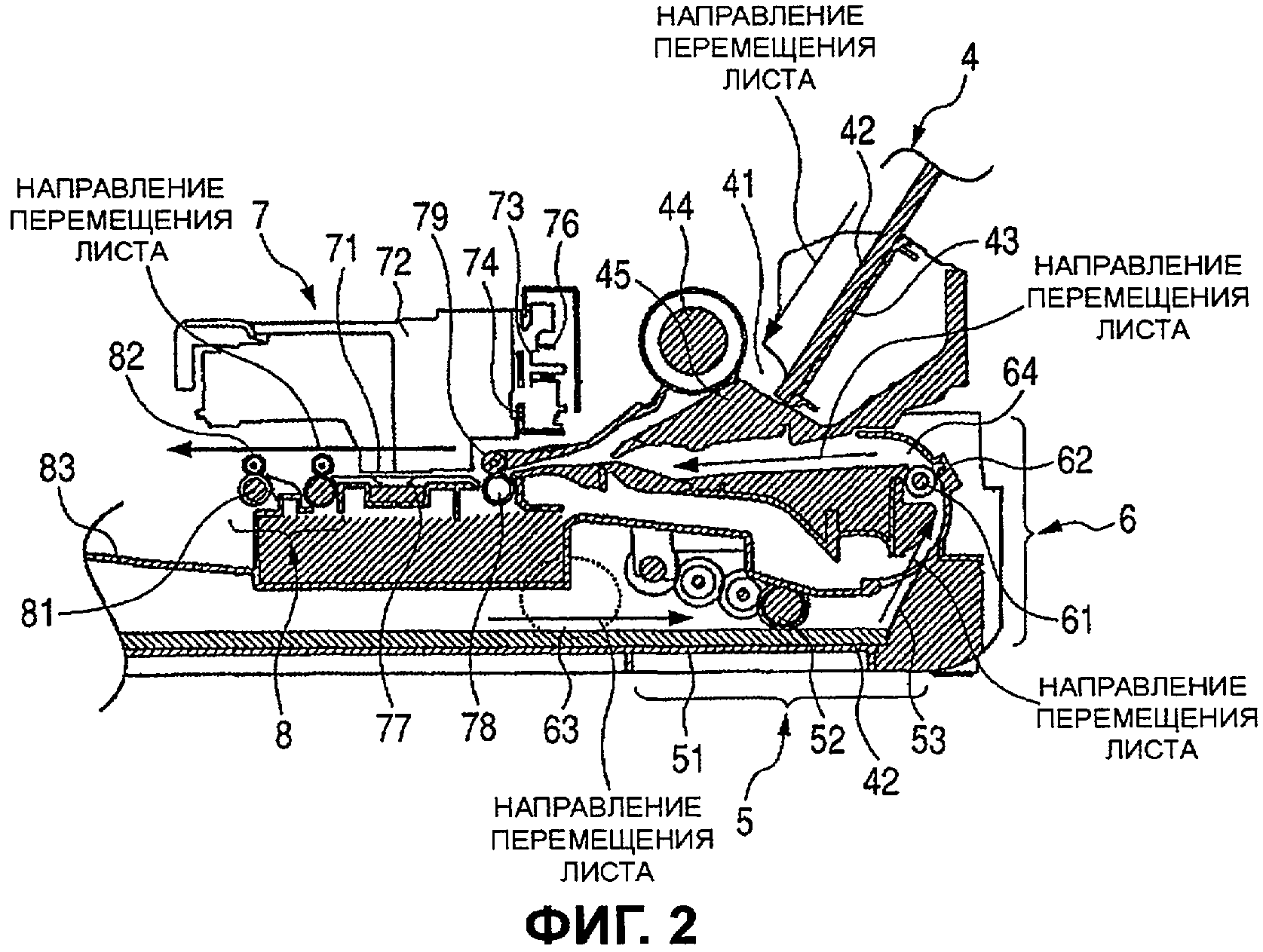
В данном примере осуществления струйное записывающее устройство, содержащее дополнительное отверстие для подачи, отличное от отверстия 41 для подачи, будет описано в качестве примера. Механизм 5 подачи в кассете расположен в нижней части струйного записывающего устройства 1. Механизм 5 подачи кассеты выполнен с возможностью содержания кассеты 51, подающего ролика 52 кассеты и части 53 для разделения кассеты. Листы 42 складываются на кассету 51, часть 53 для разделения кассеты и передаточный ролик 52 кассеты расположены в окрестности переднего конца листа 42 в направлении его перемещения, и передаточный механизм 6 кассеты расположен вниз по потоку от направления перемещения. Передаточный ролик 61 кассеты расположен в канале 64 кассеты для перемещения листа передаточного механизма 6 кассеты, и передаточный прижимной ролик 62 поджимается по направлению к передаточному ролику 61 кассеты непроиллюстрированной пружиной передаточного прижимного ролика кассеты. Кроме того, канал 64 кассеты для перемещения листа соединен таким образом, что лист 42 перемещается по дуге между частью 53 для разделения кассеты и записывающим механизмом 7. Передаточный электродвигатель 63 кассеты расположен в окрестности боковой поверхности механизма 6 подачи кассеты, так что вращающая движущая сила передаточного электродвигателя 63 кассеты передается передаточному ролику 61 кассеты через непроиллюстрированную цепь привода.
Затем будет описана конструкция механизма 2 переключения передачи движения со ссылкой на фиг.3-9 и фиг.15 и 18. Фиг.3 изображает перспективный вид, иллюстрирующий упрощенную конструкцию механизма переключения передачи движения, фиг.4 изображает перспективный вид, иллюстрирующий нейтральное положение механизма переключения передачи движения, фиг.5 изображает перспективный вид, иллюстрирующий положение подачи механизма переключения передачи движения. Фиг.6 изображает перспективный вид, иллюстрирующий положение восстановления головки механизма переключения передачи движения, и фиг.7 изображает перспективный вид, иллюстрирующий положение подачи в кассете механизма переключения передачи движения. Фиг.8 изображает перспективный вид, иллюстрирующий состояние, в котором планетарный рычаг входит в контакт с первым поворотным опорным ребром в механизме переключения передачи движения. Фиг.9 изображает перспективный вид, иллюстрирующий состояние, в котором планетарный рычаг входит в контакт со вторым поворотным опорным ребром в механизме переключения передачи движения. Фиг.15 изображает вид, иллюстрирующий состояние свободного вращения механизма переключения передачи движения, и фиг.18 изображает вид, иллюстрирующий состояние ограниченного вращения механизма переключения передачи движения.
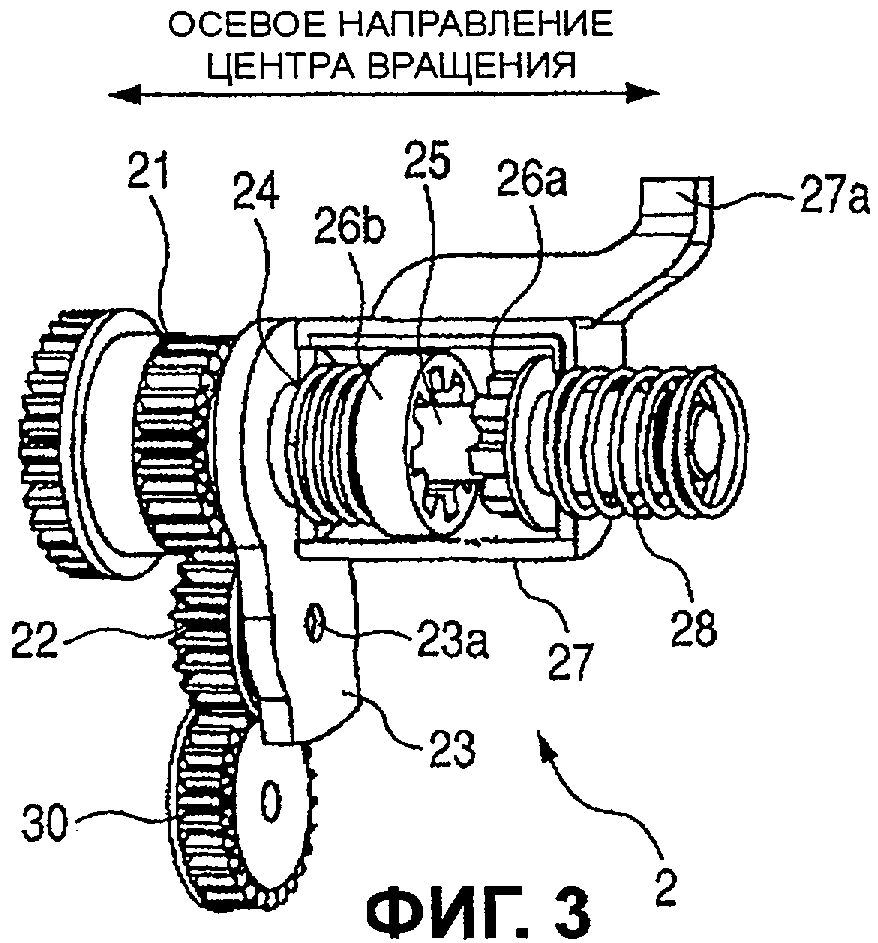
Фиг.3 и 4 иллюстрируют состояния, в которых вращающая движущая сила передаточного электродвигателя 63 кассеты передается солнечной шестерне 21 через непроиллюстрированную цепь привода. Солнечная шестерня 21 образует планетарную зубчатую передачу вместе с планетарной шестерней 22. Планетарная шестерня 22 поддерживается планетарным рычагом 23, который является опорным элементом. Планетарный рычаг 23 поддерживается таким образом, чтобы свободно вращаться вокруг центра вращения солнечной шестерни 21, в результате чего планетарная шестерня 22 поддерживается планетарным рычагом 23 таким образом, чтобы зацепляться с солнечной шестерней 21 и вращаться вокруг солнечной шестерни 21.
Вал 25, который является общим проходящим валом, расположен в центре вращения солнечной шестерни 21 и центре вращения планетарного рычага 23, то есть в центре вращения планетарной шестерни 22. Солнечная шестерня 21 и вал 25 выполнены как одно целое друг с другом. Планетарный рычаг 23 поддерживается с возможностью вращения валом 25 таким образом, чтобы свободно вращаться вокруг центра вращения солнечной шестерни 21. Кроме того, предусмотрена выходная муфта 26a в качестве включающего механизма, которому передается вращающая движущая сила солнечной шестерни 21 через вал 25. Входная муфта 26b в качестве зажимного устройства расположена в положении напротив выходной муфты 26a. Выходная муфта 26a имеет форму шестерни, выполненную с наружными зубьями. Входная муфта 26b выполнена с внутренними зубьями, которые зацепляются с наружными зубьями выходной муфты 26a. Входная муфта 26b и планетарный рычаг 23 выполнены как одно целое друг с другом. Планетарный рычаг 23, планетарная шестерня 22 и входная муфта 26b поддерживаются таким образом, чтобы перемещаться в осевом направлении вала 25 и, следовательно, перемещаться в осевом направлении центра вращения планетарной шестерни 22. Кроме того, сжатая пружина 24 планетарного рычага расположена между корпусом 27 муфты и входной муфтой 26b, и стенка корпуса 27 муфты расположена между планетарным рычагом 23 и пружиной 24 планетарного рычага. Пружина 24 планетарного рычага заставляет планетарный рычаг 23 контактировать с усилием с корпусом 27 муфты. Входная муфта 26b и выходная муфта 26a расположены внутри корпуса 27 муфты. Часть планетарного рычага 23 и часть вала 25 расположены в корпусе 27 муфты. Корпус 27 муфты поджимается в том же направлении как осевое направление центра вращения планетарной шестерни 22 под действием выталкивающего усилия пружины 28 корпуса муфты.
Как показано на фиг.8 и 9, рычаг 27a корпуса муфты выполнен как одно целое с наружной окружностью корпуса 27 муфты таким образом, что выступает от него. Рычаг 27a корпуса муфты расположен в положении, в котором он входит в контакт с кареткой 73, когда каретка 73 в качестве узла для переключения состояния вращения совершает возвратно-поступательное движение в основном направлении сканирования. Основное направление сканирования каретки 73 идентично осевому направлению вала 25. Когда каретка 73 прижимает рычаг 27a корпуса муфты в правом направлении на фиг.3 против выталкивающего усилия пружины 28 корпуса муфты, корпус 27 муфты перемещается вдоль вала 25 вместе с входной муфтой 26b. Следовательно, когда каретка 73 отсоединяется от рычага 27a корпуса муфты, каретка 73 не перемещает корпус 27 муфты в осевом направлении вала 25. При этом планетарная шестерня 22 перемещается в положение, в котором она зацепляется с солнечной шестерней 21 под действием пружины 28 корпуса муфты и пружины 24 планетарного рычага. Кроме того, выходная муфта 26a и входная муфта 26b отсоединяются друг от друга в осевом направлении вала 25. Это состояние будут называться состоянием ограниченного вращения (см. фиг.16).
С другой стороны, когда каретка 73 прижимает рычаг 27a корпуса муфты против выталкивающего усилия пружины 28 корпуса муфты, корпус 27 муфты перемещается в осевом направлении вала 25. При этом планетарная шестерня 22 устанавливается в положении, в котором она не зацепляется с солнечной шестерней 21, и выходная муфта 26a и входная муфта 26b находятся в положениях, в которых они зацеплены друг с другом. Это состояние будет называться состоянием свободного вращения (см. фиг.15). Таким образом, посредством перемещения планетарной шестерни 22 в осевом направлении центра вращения механизм включения приводится в действие.
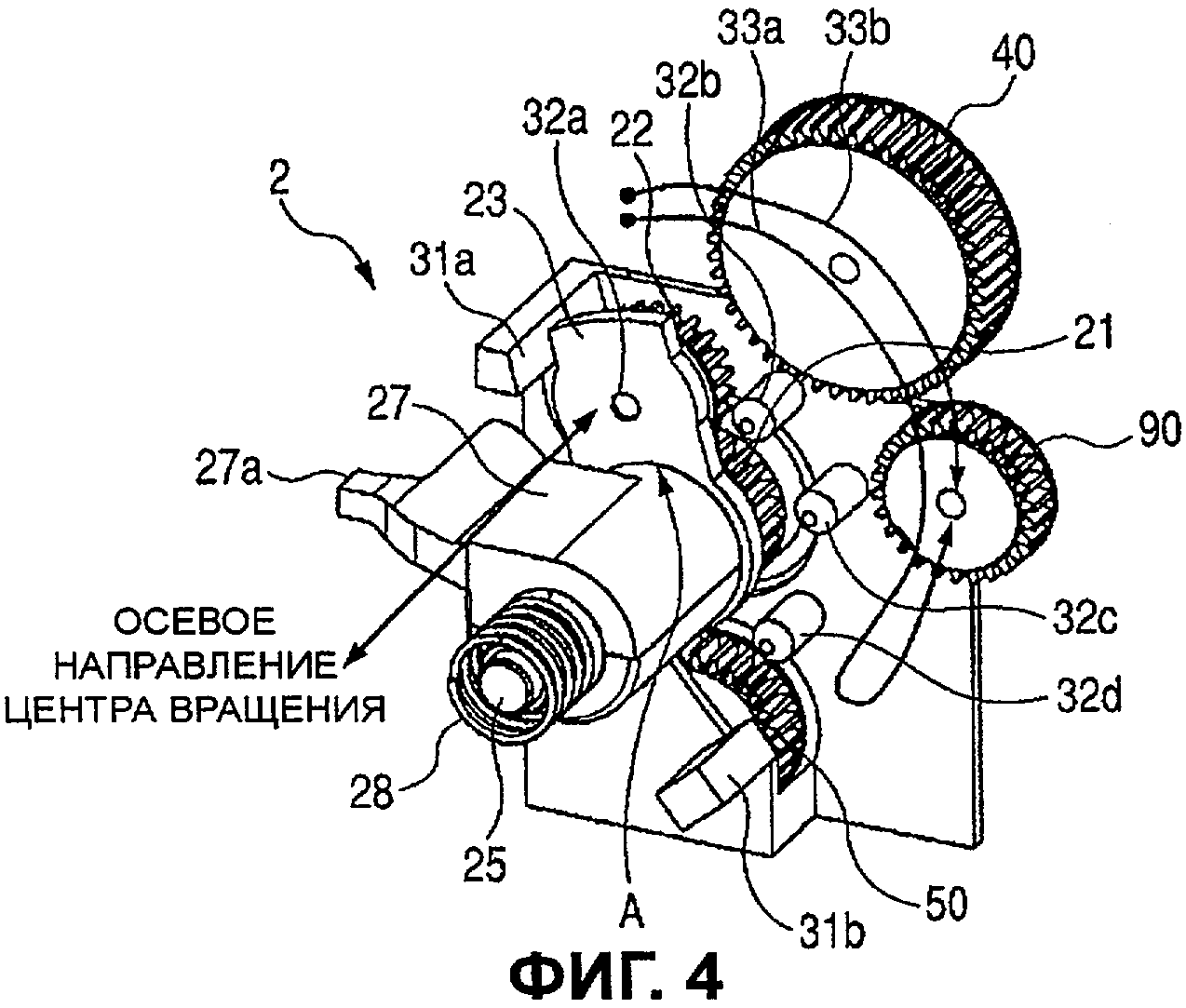
Как показано на фиг.4-9, вокруг зоны вращения планетарной шестерни 22 расположено множество ведущих входных шестерен (ведомых шестерен) для передачи вращающей движущей силы соответствующим механизмам. В качестве ведущих входных шестерен предусмотрены ведущая входная шестерня 40 для подачи для передачи вращающей движущей силы механизму 4 подачи с помощью цепи привода (не проиллюстрирована) и ведущая входная шестерня 90 для восстановления головки для передачи вращающей движущей силы механизму 9 восстановления головки с помощью цепи привода. Кроме того, в качестве ведущих входных шестерен, предусмотрена ведущая входная шестерня 50 для подачи в кассете для передачи вращающей движущей силы механизму 5 подачи кассеты с помощью цепи привода.
Кроме того, валы 32b, 32c и 32d для закрепления планетарного рычага для ограничения поворота планетарного рычага 23 расположены в зоне вращения планетарного рычага 23 в соответствующих положениях, в которых планетарная шестерня 22 зацепляется с соответствующими ведущими входными муфтами 40, 50 и 90. Кроме того, вал 32a для закрепления планетарного рычага для ограничения поворота планетарного рычага 23 расположен в зоне вращения планетарного рычага 23 в положении, в котором планетарная шестерня 22 не зацепляется с любой из ведущих входных шестерен 40, 50 и 90. Вал 32a для закрепления планетарного рычага выполнен с возможностью ограничения вращения планетарного рычага 23 в состоянии ограниченного вращения, так что планетарный рычаг 23 не способен поворачиваться. Отверстие 23a образовано в планетарном рычаге 23 и вращающемся валу планетарной шестерни 22, которая выполнена как одно целое с планетарным рычагом 23, так что поворот планетарного рычага 23 ограничивается, когда валы 32a, 32b, 32c и 32d для закрепления планетарного рычага проходят через отверстие 23a. В состоянии свободного вращения планетарный рычаг 23 отсоединен от валов 32a, 32b, 32c и 32d для закрепления планетарного рычага в осевом направлении центра вращения. Благодаря такой конструкции в состоянии свободного вращения поворот планетарного рычага 23 не ограничивается валами 32a, 32b, 32c и 32d для закрепления планетарного рычага, и, следовательно, планетарная шестерня 22 способна вращаться.
В нижеследующем описании для удобства положение, в котором планетарная шестерня 22 зацепляется с ведущей входной шестерней 40 для подачи в состоянии ограниченного вращения, будет называться положением B подачи, и положение, в котором планетарная шестерня 22 зацепляется с ведущей входной шестерней 90 для восстановления головки, будет называться положением C восстановления головки. Кроме того, положение, в котором планетарная шестерня 22 зацепляется с ведущей входной шестерней 50 для подачи в кассете, будет называться положением D подачи в кассету, и положение, в котором планетарная шестерня 22 не зацепляется ни с одной из ведущих входных шестерен 40, 50 и 90, будет называться нейтральным положением A.
В данном примере осуществления проиллюстрирована конструкция, в которой расположено четыре вала 32a, 32b, 32c и 32d для закрепления планетарного рычага, так что вращение планетарного рычага 23 ограничено в четырех положениях A, B, C и D. Однако данный пример осуществления не ограничивается данной конструкцией, и количество положений, в которых вращение планетарного рычага 23 ограничено, может быть увеличено дополнительно при условии, что может быть обеспечено достаточное пространство для расположения элементов. Таким образом, количество механизмов, которые являются пунктами назначения передачи движущей силы, в которые вращающая движущая сила передается механизмом 2 переключения передачи движения, может быть увеличено при необходимости.
Затем будет дано описание поворотные опорные ребра в качестве первого и второго опорных участков, которые приводятся в контакт с планетарным рычагом 23, со ссылкой на фиг.8 и 9. Поворотные опорные ребра 31a и 31b входят в контакт с планетарным рычагом 23 в состоянии свободного вращения, таким образом ограничивая диапазон вращения планетарного рычага 23. В данном примере осуществления первое поворотное опорное ребро 31a входит в контакт с планетарным рычагом 23 во время правого вращения передаточного электродвигателя 63 кассеты, и второе поворотное опорное ребро 31b входит в контакт с планетарным рычагом 23 во время левого вращения передаточного электродвигателя 63 кассеты. То есть, планетарный рычаг 23 выполнен с возможностью поворота между первым поворотным опорным ребром 31a и вторым поворотным опорным ребром 31b. Кроме того, в пределах диапазона вращения планетарного рычага 23, определяемого первым поворотным опорным ребром 31a и вторым поворотным опорным ребром 31b, нейтральное положение A, положение B подачи, положение C восстановления головки и положение D подачи в кассету расположены в данной последовательности. Механизм 2 переключения передачи движения управляется схемой 100 управления (фиг.10) таким образом, что планетарный рычаг 23 входит в контакт с поворотным опорным ребром, расположенным ближе к ведущей входной шестерне, передающей движущую силу между первым и вторым поворотными опорными ребрами 31a и 31b.
Когда состояние вращения переходит от состояния свободного вращения в состояние ограниченного вращения в состоянии, в котором планетарный рычаг 23 контактирует с первым поворотным опорным ребром 31a, планетарный рычаг 23 закрепляется в нейтральном положении A. Подобным образом, когда состояние вращения переходит от состояния свободного вращения в состояние ограниченного вращения в состоянии, в котором планетарный рычаг 23 контактирует со вторым поворотным опорным ребром 31b, планетарный рычаг 23 закрепляется в положении В подачи в кассету.
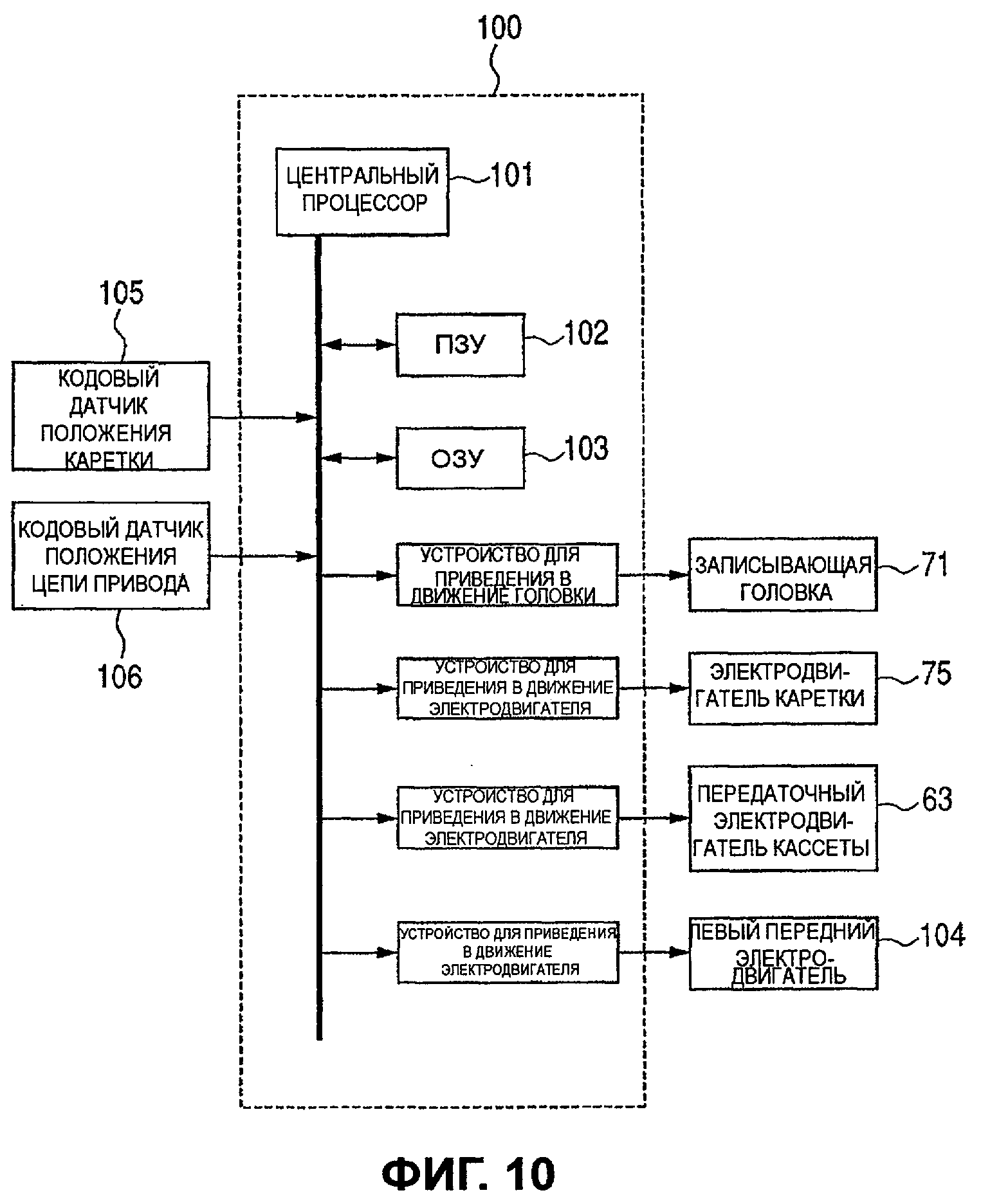
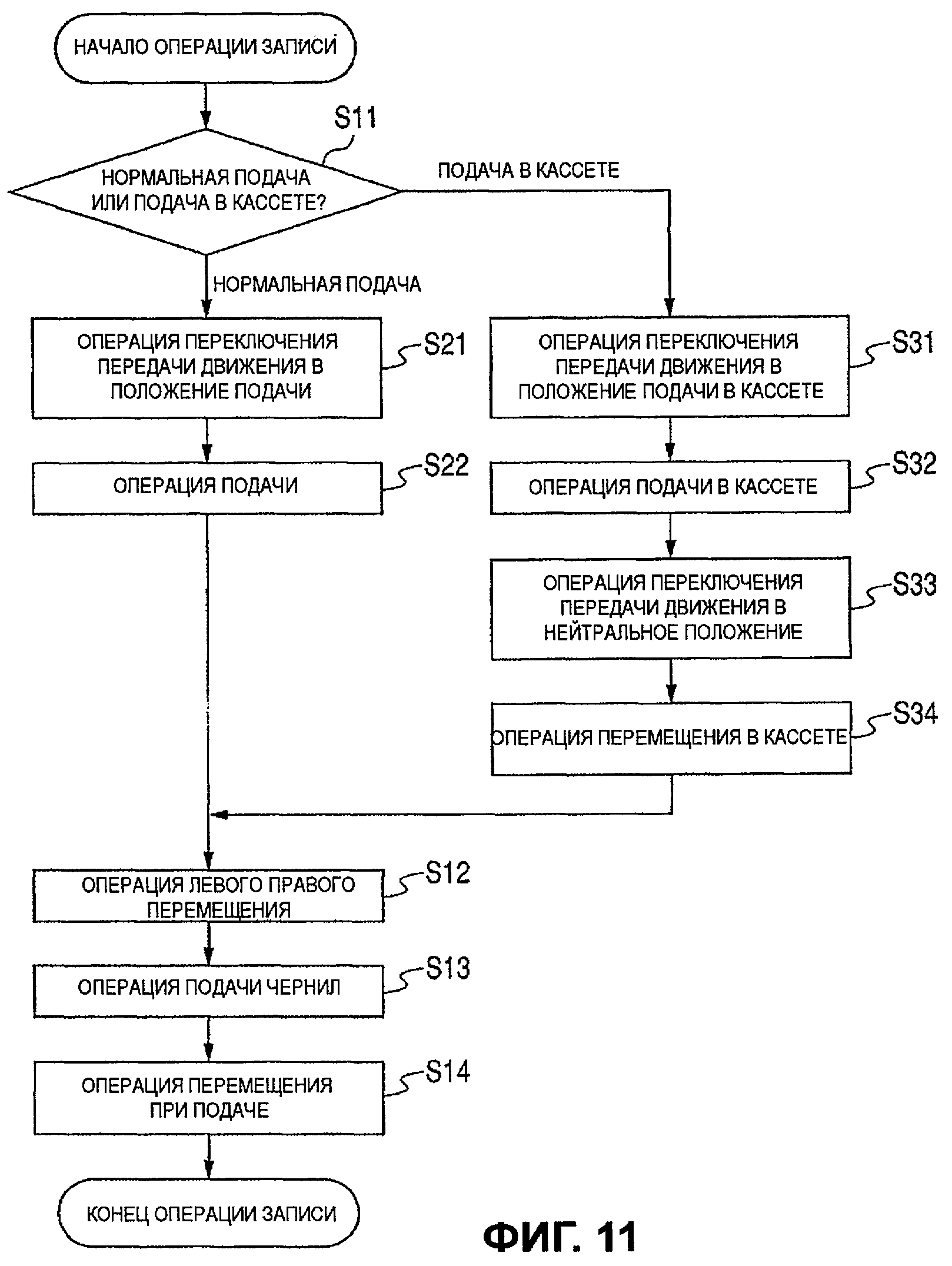
Затем описание управления рядом операций записи в соответствии с первым примером осуществления будет дано со ссылкой на фиг.10 и 11. Фиг.10 изображает блок-схему управления и фиг.11 изображает схему последовательности операций для описания операции записи.
На фиг.10 схема 100 управления записывающего устройства выполнена с возможностью включения центрального процессора 101, отвечающего за управление записывающим устройством, ПЗУ 102, хранящее программы, различные таблицы и данные, такие как целые числа, и ОЗУ 103 для временного хранения информации. Схема 100 управления также содержит устройство для приведения в движение записывающей головки 71 и устройства для приведения в движение электродвигателя 73 каретки, передаточного электродвигателя 63 кассеты и левого переднего электродвигателя 104.
Кодовый датчик 105 положения способен определять положение каретки. Кодовый датчик 106 положения способен определять угол поворота на передаточном электродвигателе 63 кассеты. Кодовый датчик 106 положения может быть выполнен с возможностью непосредственного определения угла поворота на выходном валу передаточного электродвигателя 63 кассеты и может быть выполнен с возможностью косвенного определения угла поворота посредством определения угла поворота промежуточной шестерни, передающей движущую силу от передаточного электродвигателя 63 кассеты к солнечной шестерне 21.
На фиг.11, когда начинается операция записи, сначала определяется, выбрана ли нормальная подача или подача в кассете (этап S11). При выдаче команды нормальной подачи выполняется операция переключения передачи движения в положение подачи (S21), тогда как при выдаче команды подачи в кассету выполняется операция переключения передачи движения в положение подачи в кассету (S21). Подробное описание операции переключения передачи движения будет дано ниже. При использовании данной операции вращающая движущая сила передаточного электродвигателя 63 кассеты может передаваться в механизм 4 подачи или механизм 5 подачи в кассете с помощью механизма 2 переключения передачи движения и непроиллюстрированной цепи привода.
Сначала будет описан случай приема команды нормальной подачи. Механизм 2 подачи передает вращающую движущую силу передаточного электродвигателя 63 кассеты подающему ролику 44. Затем операция подачи выполняется посредством отделения одного листа из пачки листов 42, расположенных в отверстии 41 для подачи, с использованием прижимной пластины 43 и листоотделяющего ролика 45. Затем механизм 4 подачи перемещает отделенный один лист 42 в положение зажима между левым передним роликом 78 и левым передним прижимным роликом 79 в части канала 64 кассеты для перемещения листа, таким образом завершая операцию подачи (этап S22).
Затем будет описан случай приема команды подачи в кассете. Механизм 5 подачи в кассете передает вращающую движущую силу передаточного электродвигателя 63 кассеты подающему ролику 62 кассеты с помощью непроиллюстрированной цепи привода. Затем операция подачи в кассете выполняется посредством отделения одного листа из пачки листов 42, расположенных в кассете 51, с использованием кассеты 51, подающего ролика 52 кассеты и части 53 для разделения кассеты. Затем механизм 5 подачи в кассете перемещает отделенный один лист 42 в положение зажима между передаточным роликом 61 кассеты и передаточным прижимным роликом 62 кассеты через канал 64 кассеты для перемещения листа, таким образом завершая операцию подачи в кассете (этап S32).
Подающий ролик 52 кассеты не обязательно должен приводиться в действие после того, как передний конец листа 42 достигнет положения зажима между передаточным роликом 61 кассеты и передаточным прижимным роликом 62 кассеты. Причина состоит в том, что следующий лист 42 может быть бесполезно подан, если подающий ролик 52 кассеты непрерывно приводится в действие. Следовательно, когда операция подачи в кассете завершена, планетарная шестерня 22 переключается в нейтральное положение A (этап S33).
После этого передний конец листа 42 перемещается в положение зажима между левым передним роликом 78 и левым передним прижимным роликом 79 в канале 64 кассеты для перемещения листа вследствие движения передаточного ролика 61 кассеты (этап S34).
После этого момента времени операции нормальной подачи и подачи в кассете следуют тем же самым процедурам. Левый передний ролик 78 вращается вследствие вращения левого переднего электродвигателя 104. Левый передний прижимной ролик 79 вращается таким образом, чтобы следовать вращению левого переднего ролика 78 под действием выталкивающего усилия непроиллюстрированной пружины левого переднего прижимного ролика. Когда лист 42 достигает положения зажима между левым передним роликом 78 и левым передним прижимным роликом 79, передний конец листа 42 устанавливается в положение зажима таким образом, что лист 42 зажимается между левым передним роликом 78 и левым передним прижимным роликом 79, в результате чего начинается перемещение листа 42. Левый передний ролик 78 перемещает лист 42 до тех пор, пока передний конец листа 42 не переместится в положение между записывающей головкой 71 и бумагоопорным валиком 77 (этап S12).
Затем выполняется операция записи посредством подачи чернил на лист 42 при последовательном повторении основного режима сканирования каретки 73 и режима перемещения листа левого переднего ролика 78 (этап S13).
Когда подача чернил для формирования изображения в соответствии с командами записи завершена, лист 42 зажимается выводным роликом 81 и прямозубым зубчатым колесом 82 для перемещения в разгрузочный лоток 83 на наружной стороне струйного записывающего устройства 1, таким образом выполняя разгрузочную операцию (этап S14).
Указанное описание является управлением (процедурами) ряда записывающих устройств. С другой стороны, при необходимости выполнения операции восстановления головки перед, во время или после записи для поддержания нормального состояния подачи чернил записывающей головки 71 выполняется операция переключения передачи движения в положение C восстановления головки. Подробное описание операции переключения передачи движения будет дано ниже. После этого вращающая движущая сила передаточного электродвигателя 63 кассеты передается в механизм 9 восстановления головки, и выполняется операция восстановления головки с использованием крышки 91, всасывающего насоса 92 и очищающего устройства 93.
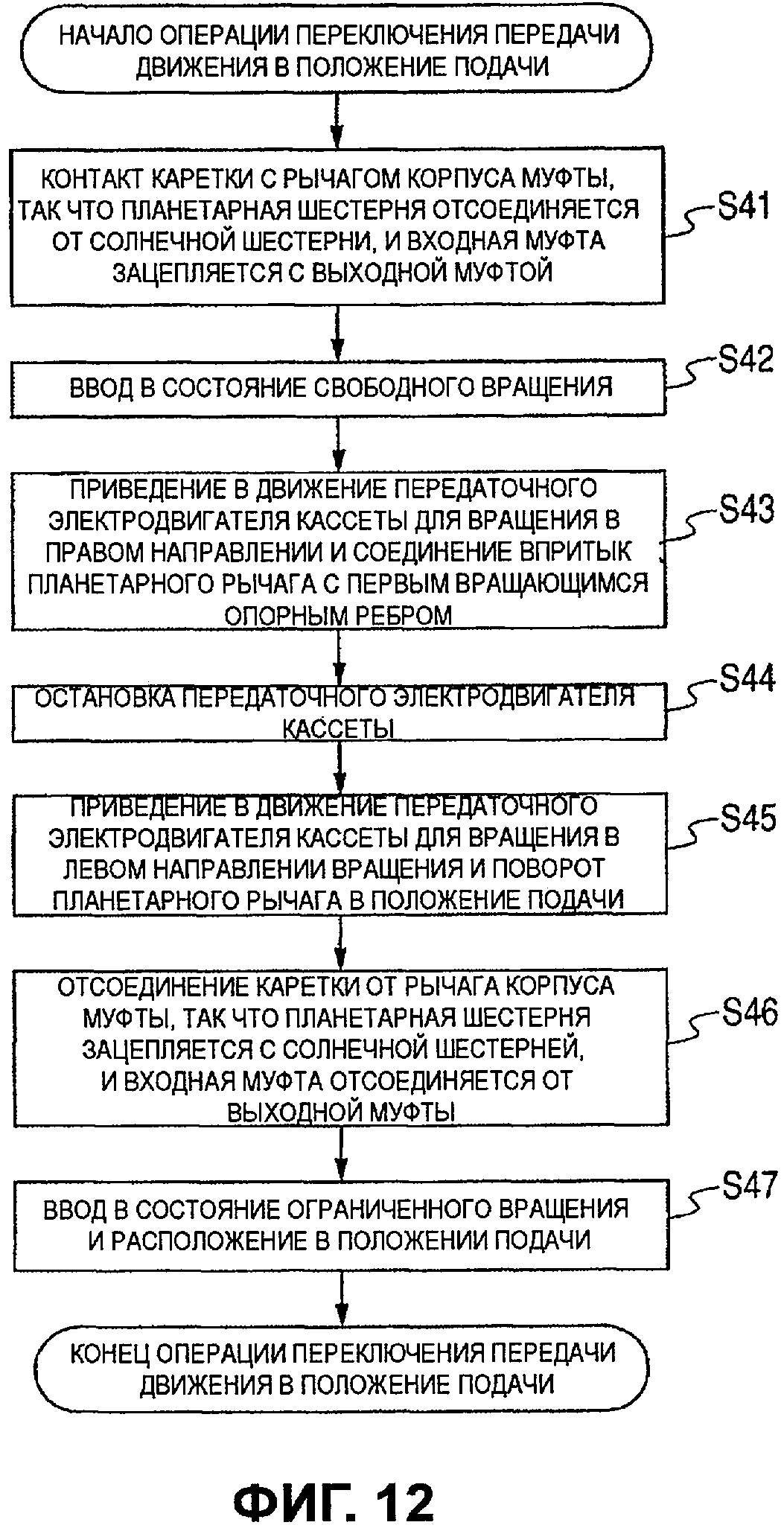
Затем подробное описание операции переключения передачи движения будет дано со ссылкой на фиг.12 и 13. Фиг.12 изображает схему последовательности операций для описания операции переключения передачи движения в положение подачи в соответствии с первым примером осуществления, и фиг.13 изображает схему последовательности операций для описания операции переключения передачи движения в положение восстановления головки в соответствии с первым примером осуществления.
После приема команды для выполнения операции переключения передачи движения в положение B подачи электродвигатель 75 каретки сначала приводится в движение для перемещения каретки 73 над механизмом 9 восстановления головки в окрестность механизма 2 переключения передачи движения. Каретка 73 непрерывно перемещается, так что каретка 73 входит в контакт с рычагом 27a корпуса муфты. Каретка 73 перемещается дополнительно, так что корпус 27 муфты перемещается в осевом направлении центра вращения против выталкивающего усилия пружины 28 корпуса муфты. При перемещении корпуса 27 муфты планетарная шестерня 22, планетарный рычаг 23 и входная муфта 26b перемещаются под действием выталкивающего усилия пружины 24 планетарного рычага. Электродвигатель 75 каретки приводится в движение до тех пор, пока кодовый датчик 105 положения каретки не определит, что каретка 73 переместилась в положение, обозначенное ссылочной позицией 73a на фиг.15.
Когда планетарная шестерня 22 перемещается в положение, проиллюстрированное на фиг.15, планетарная шестерня отсоединятся от солнечной шестерни 21, и выходная муфта 26a зацепляется с входной муфтой 26b (этап S41). Данное состояние будет называться состоянием свободного вращения.
В состоянии свободного вращения, когда передаточный электродвигатель 63 кассеты приводится в движение для вращения солнечной шестерни 21, выходная муфта 26a и входная муфта 26b вращаются с помощью вала 25, так что планетарная шестерня 22 и планетарный рычаг 23 могут вращаться (этап S42).
В состоянии свободного вращения передаточный электродвигатель 63 кассеты вращается в правом направлении вращения. Затем планетарный рычаг 23 входит в контакт с первым поворотным опорным ребром 31a при вращении, как проиллюстрировано на фиг.8 (этап S43).
Когда планетарный рычаг 23 входит в контакт с первым поворотным опорным ребром 31a, передаточный электродвигатель 63 кассеты становится неспособным вращаться в правом направлении вращения. Когда кодовый датчик 106 положения цепи привода определяет, что планетарный рычаг 23 вошел в контакт с первым поворотным опорным ребром 31a, и передаточный электродвигатель 63 кассеты остановился, передаточный электродвигатель 63 кассеты останавливается. Эта операция является операцией установки в исходное состояние положения вращения планетарного рычага 23, то есть, положения вращения планетарной шестерни 22 с помощью первого поворотного опорного ребра 31a (этап S44).
Затем передаточный электродвигатель 63 кассеты поворачивается на заданный угол в левом направлении вращения при контроле кодового датчика 106 положения цепи привода. Заданным углом является угол поворота, который рассчитывается на основании угла поворота, необходимого для достижения планетарным рычагом 23 положения B подачи от первого поворотного опорного ребра 31a (этап S45).
Затем каретка 73, которая прижимает рычаг 27a корпуса муфты, перемещается в исходное положение. Затем корпус 27 муфты возвращается в исходное положение под действием выталкивающего усилия пружины 28 корпуса муфты. Кроме того, планетарная шестерня 22, планетарный рычаг 23 и входная муфта 26b также возвращаются в свои исходные положения под действием выталкивающего усилия пружины 24 планетарного рычага. При этом планетарная шестерня 22 зацепляется с солнечной шестерней 21 и ведущей входной шестерней 40 для подачи, и выходная муфта 26a и входная муфта 26b отсоединяются друг от друга (этап S46). Это состояние будет называться состоянием ограниченного вращения (этап S47).
Указанное описание представляет собой операцию для переключения передачи движения в положение B подачи. Затем будет дано описание операции переключения передачи движения в нейтральное положение A.
Так как операция переключения передачи движения в нейтральное положение A является, по существу, такой же, как операция переключения передачи движения в положение B подачи, то будет описана только другая операция.
Посредством изменения угла поворота при вращении передаточного электродвигателя 63 кассеты в левом направлении вращения на этапе S45 планетарный рычаг 23 поворачивается для перемещения в нейтральное положение A. Операции, отличные от операции на этапе S45, являются такими же, как операция переключения передачи движения в положение B подачи. Как описано выше в первом примере осуществления, так как нейтральное положение A и первое поворотное опорное ребро 31a находятся в одном и том же взаимном расположении, фактически, может быть исключена даже операция этапа S45.
Затем будет описана операция переключения передачи движения в положение C восстановления головки со ссылкой на фиг.13. Операции переключения передачи движения в положение C восстановления головки является, по существу, такой же, как операция переключения передачи движения в положение B подачи, и единственное отличие заключается в том, что направление вращения и угол поворота передаточного электродвигателя 63 кассеты изменены. Только операция, отличная от операции переключения передачи движения в положение B подачи, будет описана ниже. Хотя передаточный электродвигатель 63 кассеты вращался в правом направлении вращения на этапе S43, передаточный электродвигатель 63 кассеты вращается в левом направлении вращения на этапе S53. На этапе S53, когда кодовый датчик 106 положения цепи привода определяет, что планетарный рычаг 23 входит в контакт со вторым поворотным опорным ребром 31b, и передаточный электродвигатель 63 кассеты остановился, передаточный электродвигатель 63 кассеты останавливается. Эта операция является операцией установки в исходное состояние положения вращения планетарного рычага 23, то есть положения вращения планетарной шестерни 22, с помощью второго поворотного опорного ребра 31b.
Хотя передаточный электродвигатель 63 кассеты был повернут на определенный угол в левом направлении вращения на этапе S45, передаточный электродвигатель 63 кассеты поворачивается на заданный угол в правом направлении вращения на этапе S55. Заданным углом является угол поворота, который рассчитывается на основании угла поворота, необходимого для достижения планетарным рычагом 23 положения C восстановления головки от второго поворотного опорного ребра 31b.
Вышеупомянутое является отличием между операцией переключения передачи движения в положение B подачи и операцией переключения передачи движения в положение C восстановления головки, которое заключается в направлении вращения и угле поворота передаточного электродвигателя 63 кассеты. Затем будет описана операция переключения передачи движения в положение D подачи в кассете. Операция переключения передачи движения в положение D подачи в кассете является, по существу, такой же, как операция переключения передачи движения в положение C восстановления головки, и только другая операция будет описана.
Посредством изменения угла поворота при вращении передаточного электродвигателя 63 кассеты в правом направлении вращения на этапе S55 планетарный рычаг 23 поворачивается для перемещения в положение D подачи в кассете. Операции, отличные от операции на этапе S55, являются такими же, как операция переключения передачи движения в положение C восстановления головки. Как описано выше, так как положение D подачи в кассете идентично положению, в котором планетарный рычаг 23 перемещается для вхождения в контакт со вторым поворотным опорным ребром 31b, фактически, может быть исключена даже операция этапа S55.
Как описано выше, при выполнении операции переключения передачи движения в нейтральное положение A или положение B подачи планетарный рычаг 23 перемещается для вхождения в контакт с первым поворотным опорным ребром 31a, таким образом устанавливая в исходное состояние положение вращения планетарного рычага 23. С другой стороны, при выполнении операции переключения передачи движения в положение C восстановления головки или положение B подачи в кассете планетарный рычаг 23 перемещается для вхождения в контакт со вторым поворотным опорным ребром 31b, таким образом устанавливая в исходное состояние положение вращения планетарного рычага 23.
Как показано на фиг.5, стрелка 34a показывает траекторию перемещения планетарного рычага 23, когда положение вращения планетарного рычага 23 было установлено в исходное состояние с использованием только первого поворотного опорного ребра 31a во время операции переключения передачи движения из положения B подачи в положение D подачи в кассете. С другой стороны, стрелка 34b показывает траекторию перемещения, когда была выполнена установка в исходное состояние с использованием второго поворотного опорного ребра 31b. Сравнивая величины перемещения, обозначенные стрелками 34a и 34b, друг с другом, величина перемещения, обозначенная стрелкой 34a, приводит к вращательному движению, соответствующему четырем положениям, тогда как величина перемещения, обозначенная стрелкой 34b, приводит к вращательному движению, соответствующему только двум положениям. Подобным образом, стрелки 35a и 35b на фиг.6 указывают соответствующие величины перемещения. Сравнивая соответствующие величины перемещения друг с другом, можно понять, что в операции переключения передачи движения из положения C восстановления головки в нейтральное положение A вращательное движение может быть уменьшено до минимума посредством принудительного вхождения в контакт планетарного рычага 23 с первым поворотным опорным ребром 31a.
Как можно понять из вышеупомянутого, посредством выполнения операции переключения передачи движения с использованием второго поворотного опорного ребра 31b величина перемещения, необходимая для поворота планетарного рычага 23 в операции переключения передачи движения, может быть уменьшена по сравнению с операцией переключения передачи движения с использованием только первого поворотного опорного ребра 31a. Кроме того, посредством выполнения операции переключения передачи движения с использованием второго поворотного опорного ребра 31b операция переключения передачи движения в положение C восстановления головки может быть упрощена, и время, используемое для выполнения операции переключения передачи движения в положение C восстановления головки, может быть уменьшено.
Как описано на этапах S43 и S53, контактное состояние планетарного рычага 23 во время его поворота определяется на основании остановки передаточного электродвигателя 63 кассеты, который является источником движения. Благодаря такой конструкции угловое положение планетарного рычага 23 может быть точно определено, и, следовательно, не нужно устанавливать дополнительный датчик для определения положения поворота планетарного рычага 23. Кроме того, ряд операций переключения передачи движения может быть выполнен посредством определения угла поворота передаточного электродвигателя 63 кассеты и остановки передаточного электродвигателя 63 кассеты в контактном состоянии.
Если положение планетарной шестерни 22 перед выполнением операции переключения передачи движения является определенным, время, необходимое для завершения операции переключения передачи движения, может быть дополнительно уменьшено посредством приведения в действие следующим образом. В случае выполнения операции переключения передачи движения из нейтрального положения A в положение C восстановления головки, второе поворотное опорное ребро 31b располагается ближе к положению C восстановления головки, которое является положением пункта назначения, чем к первому поворотному опорному ребру 31a. Однако в этом случае время может быть уменьшено посредством выполнения установки в исходное состояние положения вращения планетарного рычага 23 с использованием первого поворотного опорного ребра 31a.
Как показано стрелкой 33a на фиг.4, необходимо, чтобы планетарный рычаг 23 выполнял вращательное движение, соответствующее четырем положениям, когда была выполнена установка в исходное состояние посредством принудительного вхождения в контакт планетарного рычага 23 со вторым поворотным опорным ребром 31b. С другой стороны, как указано стрелкой 33b, необходимо, чтобы планетарный рычаг 23 выполнял вращательное движение, соответствующее только двум положениям, когда была выполнена установка в исходное состояние посредством принудительного вхождения в контакт планетарного рычага 23 с первым поворотным опорным ребром 31a. Кроме того, как указано стрелками 36a и 36b на фиг.7, время может быть уменьшено подобным образом в случае выполнения операции переключения передачи движения из положения D подачи в кассете в положение B подачи. То есть, в этом случае угол поворота планетарного рычага 23 может быть уменьшен посредством принудительного вхождения в контакт планетарного рычага 23 со вторым поворотным опорным ребром 31b.
Кроме того, планетарный рычаг 23 поворачивается как в правом направлении вращения, так и в левом направлении вращения при сохранении состояния свободного вращения планетарного рычага 23. То есть, операция поворота планетарного рычага 23 в правом направлении вращения для вхождения в контакт с первым поворотным опорным ребром 31a и операция поворота планетарного рычага 23 в левом направлении вращения для вхождения в контакт со вторым поворотным опорным ребром 31b выполняются последовательно.
Как описано выше, механизм 2 переключения передачи движения управляется схемой 100 управления для принудительного последовательного вхождения в контакт планетарного рычага 23 с первым и вторым поворотными опорными ребрами 31a и 31b. Схема 100 управления определяет угол поворота планетарного рычага 23, поворачивающегося от первого поворотного опорного ребра 31a ко второму поворотному опорному ребру 31b, посредством использования кодового датчика 106 положения цепи привода. Затем угол поворота, определенный кодовым датчиком 106 положения цепи привода, сравнивается с углом поворота, необходимым для поворота, который определяется конструктивной компоновкой элементов и хранится в ПЗУ. На основании результатов сравнения определение может быть выполнено в отношении того, что правильно ли приведен в движение механизм 2 переключения передачи движения, правильно ли функционируют два поворотных опорных ребра 31a и 31b и правильно ли приведена в движение каретка 73.
Как описано выше, в данном примере осуществления первое и второе поворотные опорные ребра 31a и 31b предусмотрены для установки в исходное состояние положения вращения планетарной шестерни 22, и ребра 31a и 31b используются селективно для контакта с планетарным рычагом 23. Конкретно, планетарный рычаг 23 может поворачиваться в результате двух типов операций, одной операции, в которой планетарный рычаг 23 сначала перемещается из существующего положения для вхождения в контакт с первым поворотным опорным ребром 31a и, затем, поворачивается в положение назначения, другой операции, в которой планетарный рычаг 23 сначала перемещается для вхождения в контакт со вторым поворотным опорным ребром 31b и, затем, поворачивается в положение назначения. Схема 100 управления выбирает и выполняет одну из упомянутых выше операций для перемещения планетарного рычага 23, который поворачивается из существующего положения в положение назначения, так что выбранная операция требует, чтобы планетарный рычаг 23 повернулся на меньший угол. Посредством управления, таким образом, время, необходимое для завершения механизмом 2 переключения передачи движения операции переключения передачи движения, может быть уменьшено, и надежность механизма 2 переключения передачи движения может быть повышена.
Второй пример осуществления
Затем будет описан второй пример осуществления со ссылкой на фиг.14 и 17. Фиг.14 изображает схему последовательности операций для описания операции переключения передачи движения в положение B подачи в соответствии со вторым примером осуществления, и фиг.13 изображает вид, иллюстрирующий состояние, в котором перемещение планетарной шестерни 22 исключено в механизме 2 переключения передачи движения.
Конструкция струйного записывающего устройства 1 и механизма 2 переключения передачи движения подобна конструкции первого примера осуществления. Операции на этапах S41-S45, проиллюстрированных на фиг.12, подобны операциям на этапах S61-S65, проиллюстрированных на фиг.14. Отличие между первым примером осуществления и вторым примером осуществления заключается в операциях на этапах S71-S79 на фиг.14, следовательно, только другие операции будут описаны, и описания одних и тех же операций будут опущены.
Как проиллюстрировано на этапе S71 на фиг.14, каретка 73 сначала перемещается в положение готовности. Положение готовности расположено между первым положением 73a каретки 73 в состоянии свободного вращения, как проиллюстрировано на фиг.15, и вторым положением 73c каретки 73 в состоянии ограниченного вращения, как проиллюстрировано на фиг.18, и соответствует третьему положению 73b, как проиллюстрировано на фиг.16 и 17. Состояние, в котором каретка 73 расположена в третьем положении 73b, будет называться состоянием готовности вращения. Как проиллюстрировано на фиг.17, когда каретка 73 расположена в положении 73b готовности, перемещение рычага 27a корпуса муфты ограничено в состоянии, в котором планетарная шестерня 22 и солнечная шестерня 21 не способны полностью зацепляться друг с другом, а зацепляются частично в направлении толщины шестерен.
Каретка 73 выполняет функцию узла для переключения состояния вращения, как описано выше, и рычаг 27a корпуса муфты поджимается в положение, в котором он входит в контакт с кареткой 73 под действием выталкивающего усилия пружины 28 корпуса муфты. При этом планетарная шестерня 22 перемещается в осевом направлении для вхождения в контакт с солнечной шестерней 21, и выходная муфта 26a и входная муфта 26b отсоединяются друг от друга и не способны принимать вращающую движущую силу (этап S71).
Два состояния могут иметь место в результате операции на этапе S71. Как описано выше, если планетарная шестерня 22 была способна зацепляться с солнечной шестерней 21 в результате перемещения в осевом направлении на этапе S71, рычаг 27a корпуса муфты будет следовать перемещению каретки 73, как проиллюстрировано на фиг.17. При этом выталкивающее усилие пружины 28 корпуса муфты заставляет рычаг 27a корпуса муфты входить в контакт с опорной частью каретки 73, которая является подвижным элементом (этап S73).
Если планетарная шестерня 22 не способна зацепляться с солнечной шестерней 21, а боковые поверхности зубьев планетарной шестерни 22 находятся в зацеплении с боковыми поверхностями зубьев солнечной шестерни 21 на этапе S71, рычаг 27a корпуса муфты останавливается, не следуя за движением каретки 73, как проиллюстрировано на фиг.16. Затем рычаг 27a корпуса муфты отсоединяется от опорных частей каретки 73. При этом выталкивающее усилие пружины 28 корпуса муфты прикладывается к опорным частям наклонных боковых поверхностей соответствующих зубьев планетарной шестерни 22 и солнечной шестерни 21. Так как сопротивление трения между наклонными поверхностями является достаточно большим, выталкивающее усилие и сила трения находятся в уравновешенном состоянии (этап S75).
В состоянии, в котором планетарная шестерня 22 перемещается по солнечной шестерне 21, мертвый ход в цепи привода, проходящей от передаточного электродвигателя 63 кассеты к солнечной шестерне 21, планетарной шестерне 22, ведущей входной шестерне 30 и соответствующим механизмам назначений передачи движения, равен нулю, как проиллюстрировано на фиг.19. Причина состоит в том, что планетарная шестерня 22 может иметь мертвый ход при вращении, если мертвый ход не равен нулю, и, следовательно, взаимное влияние зубьев во время ее перемещения в осевом направлении может быть исключено вследствие мертвого хода при вращении. Состояние, в котором планетарная шестерня 22 перемещается по солнечной шестерне 21 таким образом, что мертвый ход становится равным нулю, может иметь место в случае, в котором цепь привода заблокирована в правом направлении вращения, и мертвый ход становится равным нулю, и случай, в котором цепь привода заблокирована в левом направлении вращения, и мертвый ход становится равным нулю. Фиг.19 иллюстрирует состояние, в котором цепь привода заблокирована в правом направлении вращения.
После этапа S75 передаточный электродвигатель 63 кассеты вращается в левом направлении вращения (этап S76). Причиной для вращения передаточного электродвигателя 63 кассеты в левом направлении вращения на данном этапе является следующее. Для выполнения операции подачи после завершения операции переключения передачи движения в положение B подачи передаточный электродвигатель 63 кассеты вращается в правом направлении вращения таким образом, что подающий ролик вращается. При этом когда планетарная шестерня 22 перемещается по солнечной шестерне 21 в состоянии, заблокированном в левом направлении вращения, мертвый ход при вращении может возникнуть в цепи привода из-за вращающей движущей силы в правом направлении вращения во время следующей операции подачи. Следовательно, взаимное влияние между зубьями планетарной шестерни 22 исключено, и планетарная шестерня 22 перемещается в осевом направлении для зацепления с солнечной шестерней 21.
С другой стороны, как проиллюстрировано на фиг.19, когда планетарная шестерня 22 перемещается по солнечной шестерне 21 в состоянии, заблокированном в правом направлении вращения, взаимное влияние между зубьями не будет исключено вследствие вращающей движущей силы в правом направлении вращения во время следующей операции подачи. Причина состоит в том, что состояние перемещения планетарной шестерни 22 по солнечной шестерне 21 происходит вследствие контакта между наклонными боковыми поверхностями зубьев. Следовательно, даже когда вращающее движение в правом направлении вращения было выполнено в таком состоянии, ведущая входная шестерня 30 может поворачиваться в состоянии, в котором планетарная шестерня 22 перемещается по солнечной шестерне 21. В противном случае планетарная шестерня 22 может перемещаться по наклонным боковым поверхностям зубьев против выталкивающего усилия пружины 28 корпуса муфты, в результате чего планетарная шестерня 22 может выталкиваться назад в осевом направлении центра вращения. То есть, когда вращательное движение в правом направлении вращения выполняется в таком состоянии, может иметь место любое из вышеупомянутых состояний.
Так как вращательное движение во время операции подачи, которая выполняется после завершения операции переключения передачи движения, осуществляется в правом направлении вращения, вращательное движение на этапе S76 во время переключения передачи движения устанавливается в левом направлении вращения. Посредством приведения в действие, таким образом, когда планетарная шестерня 22 заблокирована в правом направлении вращения, так что мертвый ход равен нулю, мертвый ход при вращении возникает в планетарной шестерне 22 вследствие вращательного движения в левом направлении вращения, которое выполняется во время операции переключения передачи движения. Следовательно, как проиллюстрировано на фиг.20, взаимное влияние между зубьями, когда планетарная шестерня 22 перемещается в осевом направлении, может быть исключено. Оптимальный угол поворота, необходимый для исключения взаимного влияния, равен, по меньшей мере, половине одного зуба шестерни. Причина состоит в том, что взаимное влияние между зубьями может не произойти при угле, соответствующем половине одного зуба шестерни, или больше.
С другой стороны, когда планетарная шестерня 22 заблокирована в левом направлении вращения, так что мертвый ход становится равным нулю, поскольку операция подачи, которая выполняется после завершения операции переключения передачи движения, выполняется вследствие поворота в правом направлении вращения, взаимное влияние между зубьями планетарной шестерни 22 может быть исключено вследствие поворота в правом направлении вращения. Кроме того, в этом случае, так как угол поворота в правом направлении вращения соответствует половине одного зуба шестерни, он не влияет на цепь привода на задней ступени или механизмы назначения передачи движения, в которые передается вращающая движущая сила ведущей входной шестерни (этап S74).
Кроме того, в состоянии, в котором планетарная шестерня 22 перемещается по боковым поверхностям солнечной шестерни 21, как проиллюстрировано на этапе S75, рычаг 27a корпуса муфты и каретка 73 отсоединяются друг от друга, как проиллюстрировано на фиг.16. После этого, когда состояние перемещения планетарной шестерни 22 по солнечной шестерне 21 исключено на этапе S76, рычаг 27a корпуса муфты входит в контакт с опорными частями каретки 73 под действием выталкивающего усилия пружины 28 корпуса муфты, как проиллюстрировано на фиг.17. При этом, хотя корпус 27 муфты и планетарная шестерня 22 увеличивают скорость под действием выталкивающего усилия пружины 28 корпуса муфты, поскольку каретка 73 расположена в положении 73b готовности, величина перемещения является достаточно небольшой. Следовательно, корпус 27 муфты будет сталкиваться с кареткой 73 перед ускорением до высокой скорости, так что шум при столкновении может быть уменьшен. Кроме того, поскольку каретка 73 останавливается в положении готовности с помощью ремня 76, который является упругим элементом, даже когда ускоренный рычаг 27a корпуса муфты сталкивается с кареткой 73, удар при столкновении может быть амортизирован ремнем 76 каретки, таким образом уменьшая шум при столкновении. С другой стороны, когда планетарная шестерня 22, которая выполнена из относительно твердого материала, сталкивается с солнечной шестерней 21, как проиллюстрировано на фиг.18, может легко создаваться относительно сильный шум при столкновении, поскольку они оба выполнены из твердых материалов.
Как описано выше, направление вращения вращательного движения, которое выполняется во время операции переключения передачи движения, является противоположным направлению вращения вращательного движения, которое выполняется после завершения операции переключения передачи движения. Кроме того, угол поворота в левом направлении вращения устанавливается для половины одного зуба планетарной шестерни 22. При этом влияние на пункт назначения передачи движения может быть уменьшено максимально, и состояние перемещения планетарной шестерни 22 по солнечной шестерне 21 может быть достоверно исключено. Кроме того, как проиллюстрировано на фиг.16 и 17, поскольку механизм 2 переключения передачи движения зацеплен против каретки 73, расположенной в положении готовности, может быть предотвращено образование шума при столкновении.
Как описано выше, в соответствии с данным примером осуществления солнечная шестерня 21 поворачивается на очень маленький угол во время операции переключения передачи движения и, затем, поворачивается в направлении, противоположном направлению вращения движения, которое выполняется после завершения операции переключения передачи движения. Следовательно, планетарная шестерня 22 и солнечная шестерня 21 могут полностью зацепляться друг с другом, и механизм 2 переключения передачи движения, перемещающийся во время операции переключения передачи движения, может зацепляться против каретки 73. Следовательно, в соответствии с данным примером осуществления бесшумная операция переключения передачи движения механизма 2 переключения передачи движущей силы и повышение надежности операции переключения передачи движения могут быть обеспечены.
На этапе S72 схемы последовательности операций на фиг.14 определяется, перемещается или нет планетарная шестерня 22 по солнечной шестерне 21. Состояние перемещения может быть фактически определено посредством использования датчика, и передаточный электродвигатель 63 кассеты может управляться разными способами в зависимости от результатов определения. Например, этап S74 может быть исключен, если не возникает состояние перемещения.
На этапе S71 схемы последовательности операций на фиг.21 каретка 73 перемещается в положение готовности. В это время планетарная шестерня 22 зацепляется с солнечной шестерней 21 и ведущей входной шестерней 40 для подачи листов, или боковая сторона планетарной шестерни находится в таком контакте с боковой стороной солнечной шестерни 21 и боковой стороной ведущей входной шестерни 40, что планетарная шестерня 22 катится по солнечной шестерне 21. На этапе S74 передаточный электродвигатель 63 кассеты приводится в такое вращение, что солнечная шестерня 21 вращается для передачи приводного усилия через планетарную шестерню 22 на ведущую входную шестерню 40. В это время, если планетарная шестерня катится по солнечной шестерне 21, качение получается за счет вращения солнечной шестерни 21, и планетарная шестерня 22 перемещается для зацепления с солнечной шестерней 21. Рычаг 27а корпуса муфты, смещающийся вместе с планетарной шестерней 22, снова находится в контакте с кареткой 73 (этап S77). На этапе S78 каретка 73 перемещается таким образом, что каретка 73 отделяется от рычага 27а корпуса муфты. В результате процесс переходит в стадию ограничения вращения и положение подачи листа.
На этапе S74 передаточный электродвигатель 63 кассеты приводится во вращение в левом направлении в любых случаях без определения или определения, перемещается ли планетарная шестерня 22 по солнечной шестерне 21. При отсутствии датчика для определения состояния перемещения, состояние перемещения, если возникает, может быть исключено посредством приведения во вращение передаточного электродвигателя 63 кассеты в левом направлении вращения.
Хотя настоящее изобретение было описано со ссылкой на примеры осуществления, следует понимать, что настоящее изобретение не ограничивается раскрытыми примерами осуществления. Объем нижеследующей формулы изобретения должен соответствовать широкому толкованию для осуществления всех таких модификаций и эквивалентных конструкций и функций.
Реферат
Изобретение относится к струйному записывающему устройству, выполняющему запись посредством использования приводного передаточного устройства. Приводное передаточное устройство посредством узла для переключения состояния вращения осуществляет переключение между состоянием ограниченного вращения и состоянием свободного вращения. В состоянии ограниченного вращения планетарная шестерня зацепляется с ведущей входной шестерней, и зажимное устройство не способно передавать вращающую движущую силу. В состоянии свободного вращения планетарная шестерня отсоединяется от ведущей входной шестерни, и зажимное устройство способно передавать вращающую движущую силу. Механизм переключения передачи движения содержит первый и второй опорные участки, которые входят в контакт с планетарным рычагом, поворачиваемым в состоянии свободного вращения для установки исходного состояния положения вращения планетарной шестерни. Механизм переключения передачи движения способен выбирать, который один из первого и второго опорных участков войдет в контакт с планетарным рычагом в соответствии с положением ведущей входной шестерни, передающей вращающую движущую силу, из множества ведущих входных шестерен. Повышена надежность изобретения за счет упрощения механизмов. 6 н. и 13 з.п. ф-лы, 21 ил.
Формула
источник движения, создающий вращающую движущую силу;
приводной передаточный узел, выполненный с возможностью передачи вращающей движущей силы источника движения;
механизм переключения передачи движения, содержащий солнечную шестерню, планетарную шестерню и планетарный рычаг, способный поддерживать планетарную шестерню с тем, чтобы свободно вращаться вокруг солнечной шестерни, причем механизм переключения передачи движения способен селективно переключать вращающую движущую силу с приводного передаточного узла во множество пунктов назначения передачи движения;
множество ведущих входных шестерен, способных передавать вращающую движущую силу, переданную с механизма переключения передачи движения, в пункты назначения передачи движения;
зажимное устройство, переключающее состояние вращения планетарной шестерни между состоянием свободного вращения, в котором вращающая движущая сила солнечной шестерни передается планетарному рычагу так, что планетарный рычаг поворачивается, и состоянием ограниченного вращения, в котором вращающая движущая сила солнечной шестерни не передается планетарному рычагу так, что планетарный рычаг не поворачивается; и
узел для переключения состояния вращения, приводящий в действие зажимное устройство посредством перемещения планетарной шестерни в осевом направлении центра вращения, таким образом, осуществляя переключение между состоянием ограниченного вращения и состоянием свободного вращения, при этом
в состоянии ограниченного вращения планетарная шестерня зацепляется с ведущей входной шестерней, и зажимное устройство не передает вращающую движущую силу;
в состоянии свободного вращения планетарная шестерня отсоединяется от ведущей входной шестерни, и зажимное устройство передает вращающую движущую силу; причем
механизм переключения передачи движения содержит первый и второй опорные участки, которые выполнены с возможностью вхождения в контакт с планетарным рычагом, поворачиваемым в состоянии свободного вращения, для установки в исходное состояние положения вращения планетарной шестерни; и
механизм переключения передачи движения способен выбирать, который один из первого и второго опорных участков будет входить в контакт с планетарным рычагом в соответствии с положением ведущей входной шестерни, передающей вращающую движущую силу, среди множества ведущих входных шестерен.
источник движения, создающий вращающую движущую силу;
приводной передаточный узел, выполненный с возможностью передачи вращающей движущей силы источника движения;
механизм переключения передачи движения, содержащий солнечную шестерню, планетарную шестерню и планетарный рычаг, и поддерживающий планетарную шестерню для свободного вращения вокруг солнечной шестерни, причем механизм переключения передачи движения селективно переключает вращающую движущую силу с приводного передаточного узла во множество пунктов назначения передачи движения;
множество ведущих входных шестерен, передающих вращающую движущую силу, переданную с механизма переключения передачи движения, в пункты назначения передачи движения;
зажимное устройство, переключающее состояние вращения планетарной шестерни между состоянием свободного вращения, в котором вращающая движущая сила солнечной шестерни передается планетарному рычагу так, что планетарный рычаг поворачивается, и состоянием ограниченного вращения, в котором вращающая движущая сила солнечной шестерни не передается планетарному рычагу так, что планетарный рычаг не поворачивается; и
узел для переключения состояния вращения, приводящий в действие зажимное устройство посредством перемещения планетарной шестерни в осевом направлении центра вращения, таким образом, осуществляя переключение между состоянием ограниченного вращения и состоянием свободного вращения, при этом
в состоянии свободного вращения планетарная шестерня отсоединяется от солнечной шестерни и ведущей входной шестерни, зажимное устройство передает вращающую движущую силу, и узел для переключения состояния вращения перемещается в первое положение, в котором он входит в контакт с механизмом переключения передачи движения; причем
в состоянии ограниченного вращения планетарная шестерня зацепляется с солнечной шестерней и ведущей входной шестерней, соответственно зажимное устройство не передает вращающую движущую силу, и узел для переключения состояния вращения перемещается во второе положение, в котором он отсоединяется от механизма переключения передачи движения; и
планетарная шестерня имеет состояние готовности вращения, в котором планетарная шестерня зацепляется с солнечной шестерней и ведущей входной шестерней, соответственно зажимное устройство не передает вращающую движущую силу, и узел для переключения состояния вращения перемещается в третье положение, расположенное между первым положением и вторым положением.
солнечную шестерню, выполненную с возможностью вращения под действием источника движения;
множество приводных шестерен;
планетарную шестерню, выполненную с возможностью зацепления с солнечной шестерней и селективного зацепления с одной из множества приводных шестерен, таким образом, передавая движение от солнечной шестерни одной из множества приводных шестерен;
опорный элемент, поддерживающий планетарную шестерню для свободного вращения вокруг солнечной шестерни;
муфту, выполненную с возможностью селективного соединения опорного элемента с валом солнечной шестерни, приводимой в движение источником движения, таким образом, обеспечивая вращение опорного элемента;
первый опорный участок, выполненный с возможностью вхождения в контакт с опорным элементом, таким образом, ограничивая диапазон вращения опорного элемента; и
устройство управления, управляющее источником движения таким образом, что вал солнечной шестерни соединяется с опорным элементом с помощью муфты, и опорный элемент входит в контакт с первым опорным участком под действием источника движения, и затем планетарная шестерня селективно зацепляется с одной из множества приводных шестерен.
передаточное средство, которое передает среду для записи,
записывающее средство, записывающее данные или изображения на среду для записи,
передаваемую передаточным средством, и
приводное передаточное устройство по любому из пп.1-9, выполненное с возможностью передачи приводного усилия источника приведения на передаточное средство.
передаточный узел, перемещающий среду для записи; и
записывающий узел, записывающий данные или изображения на среду для записи, перемещаемую передаточным узлом,
при этом приводное передаточное устройство по п.9 передает движение источника движения передаточному узлу.
Комментарии