Печатающее устройство, способ управления для него и носитель данных - RU2616547C2
Код документа: RU2616547C2
Чертежи










Описание
Уровень техники изобретения
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству печати, для печати на листе посредством печатающей головки и, более конкретно, к устройству печати для транспортирования листов в область печати, обращенную к печатающей головке, в то время как часть следующего листа накладывается на часть предыдущего листа.
Описание предшествующего уровня техники
[0002] В японском выложенном патенте № 2000-15881 описывается устройство печати для управления выполнением наложения краевого поля переднего края следующего листа на краевое поле заднего края предыдущего листа, которое содержит подающий блок для последовательного отделения и подачи множества листов, печатающий блок для формирования изображения на листе, блок транспортирования для транспортирования листа в печатающий блок, блок обнаружения для обнаружения листа и блок управления для управления приведением в действие подающего механизма в соответствии с сигналом механизма обнаружения.
[0003] Однако устройство, описанное в японском выложенном патенте № 2000-15881, может начать подачу следующего листа, только когда величина поля заднего края предыдущего листа и величина поля переднего края следующего листа подтверждены до начала подачи следующего листа. Это вводит такую техническую проблему, что начало подачи следующего листа занимает некоторое время.
Сущность изобретения
[0004] Настоящее изобретение было выполнено с учетом вышеописанной проблемы и обеспечивает устройство печати, которое может начинать подачу следующего листа, даже при отсутствии подтверждения величины поля заднего края предыдущего листа и величины поля переднего края следующего листа.
[0005] Согласно первому аспекту настоящего изобретения обеспечено устройство печати, содержащее: подающий валик, выполненный с возможностью подачи запечатываемого листа, уложенного в стопку в листоприемном блоке; транспортирующий валик, выполненный с возможностью транспортирования запечатываемого листа, подаваемого посредством подающего валика; печатающий блок, выполненный с возможностью выполнения печати на запечатываемом листе, переданном посредством транспортирующего валика; блок управления транспортированием, выполненный с возможностью управления транспортированием запечатываемых листов так, чтобы задний край предыдущего листа, в качестве запечатываемого листа поданного ранее из листоприемного блока, и передний край следующего листа, в качестве запечатываемого листа поданного следующим из листоприемного блока, накладывались друг на друга; и блок определения, выполненный с возможностью определения, выполнять ли транспортирование следующего листа в положение, обращенное к печатающему блоку, при сохранении состояния наложения между предыдущим листом и следующим листом.
[0006] Согласно второму аспекту настоящего изобретения обеспечен способ управления устройством печати, включающим в себя подающий валик, выполненный с возможностью подачи запечатываемого листа, уложенного в стопку в листоприемном блоке, транспортирующий валик, выполненный с возможностью транспортирования запечатываемого листа, подаваемого посредством подающего валика, и печатающий блок, выполненный с возможностью печати на запечатываемом листе, транспортируемом посредством транспортирующего валика, способ, содержащий: этап управления транспортированием для управления транспортированием запечатываемых листов так, чтобы задний край предыдущего листа, в качестве запечатываемого листа поданного ранее из листоприемного блока, и передний край следующего листа, в качестве запечатываемого листа поданного следующим из листоприемного блока, накладывались друг на друга; и этап определения для определения того, выполнять ли транспортирование следующего листа в положение, обращенное к печатающему блоку, при сохранении состояния наложения между предыдущим листом и следующим листом.
[0007] Кроме того, отличительные признаки настоящего изобретения станут очевидны из последующего описания иллюстративных вариантов осуществления со ссылкой на сопроводительные чертежи.
Краткое описание чертежей
[0008] Фиг. 1 иллюстрирует вид для объяснения операции непрерывной подачи с наложением в устройстве печати согласно варианту осуществления настоящего изобретения;
[0009] Фиг. 2 иллюстрирует вид для объяснения операции непрерывной подачи с наложением в устройстве печати согласно варианту осуществления настоящего изобретения;
[0010] Фиг. 3 иллюстрирует вид для объяснения операции непрерывной подачи с наложением в устройстве печати согласно варианту осуществления настоящего изобретения;
[0011] Фиг. 4A и 4B иллюстрируют виды для объяснения конструкции отделяющего валика;
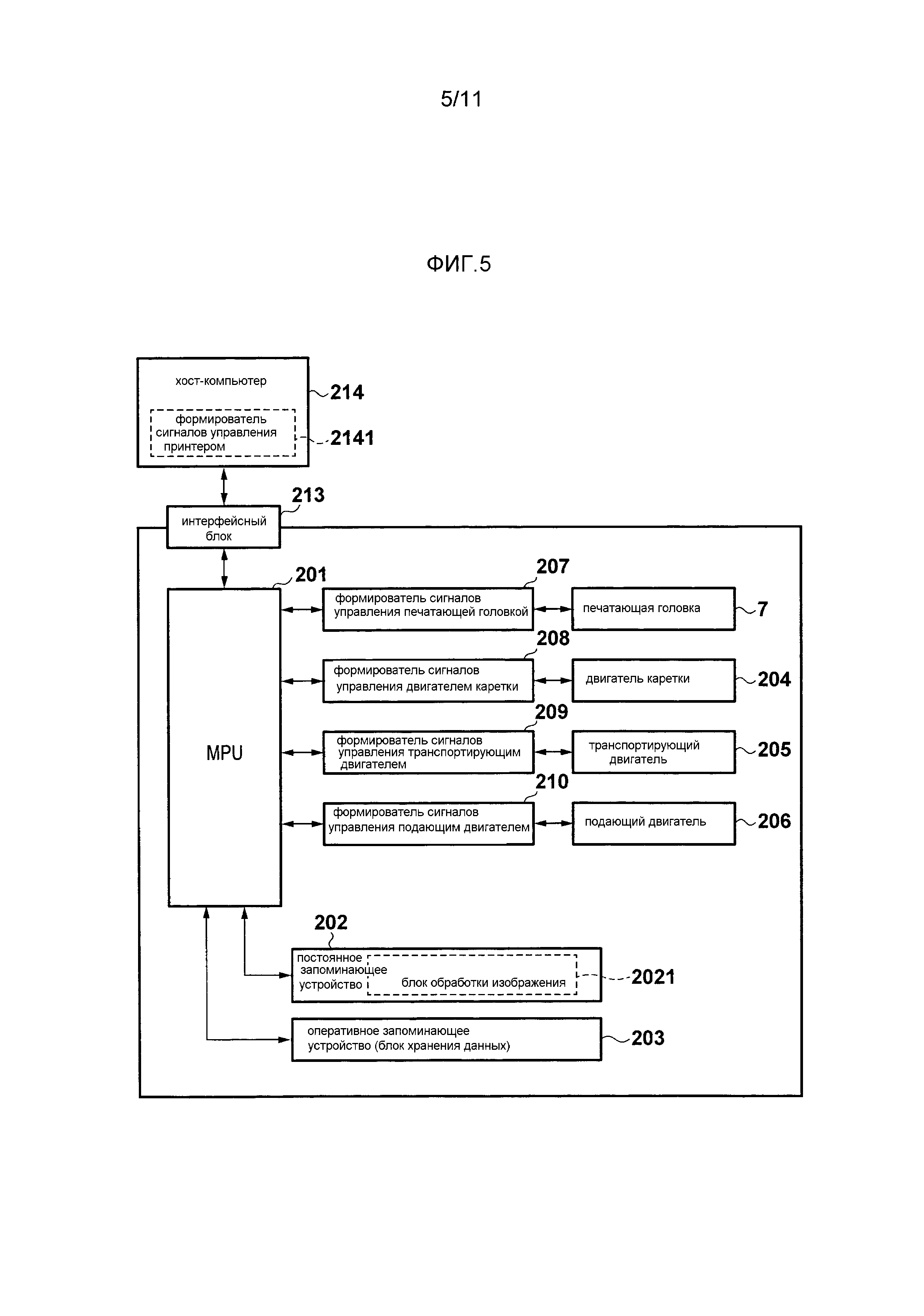
[0012] Фиг. 5 иллюстрирует блок-схему, изображающую устройство печати согласно варианту осуществления;
[0013] Фиг. 6A и 6B иллюстрируют блок-схемы последовательности операций, иллюстрирующие операцию непрерывной подачи с наложением согласно варианту осуществления;
[0014] Фиг. 7 иллюстрирует вид для объяснения операции выполнения наложения следующего листа на предыдущий лист;
[0015] Фиг. 8 иллюстрирует вид для объяснения операции выполнения наложения следующего листа на предыдущий лист;
[0016] Фиг. 9 иллюстрирует блок-схему последовательности операций для объяснения операции коррекции перекоса следующего листа согласно варианту осуществления; и
[0017] Фиг. 10 иллюстрирует блок-схему последовательности операций для объяснения операции вычисления положения переднего края следующего листа.
Описание вариантов осуществления
[0018] Ниже будет подробно описан вариант осуществления настоящего изобретения со ссылкой на сопроводительные чертежи.
[0019] Фиг. 1-3 иллюстрируют виды в разрезе для объяснения операции непрерывной подачи с наложением в устройстве печати согласно варианту осуществления настоящего изобретения. Сначала, схематичная конструкция печатающего устройства согласно варианту осуществления будет описана со ссылкой на ST1 из Фиг. 1.
[0020] В ST1 из Фиг. 1, ссылочное обозначение 1 обозначает запечатываемые листы. Множество запечатываемых листов 1 уложено в стопку на подающем лотке 11 (листоприемном блоке). Отделяющий валик 2 вплотную примыкает к верхнему запечатываемому листу 1, уложенному в стопку на подающем лотке 11, для выполнения его отделения. Подающий валик 3 выполняет подачу запечатываемого листа 1, отделенного посредством отделяющего валика 2, в сторону вывода направления транспортирования листа. Ведомый подающий валик 4 поджимается к подающему валику 3 для помещения запечатываемого листа 1 между ним и подающим валиком 3, тем самым осуществляя подачу запечатываемого листа 1.
[0021] Транспортирующий валик 5 выполняет транспортирование запечатываемого листа 1, подаваемого посредством подающего валика 3 и ведомого подающего валика 4 в положение, обращенное к печатающей головке 7. Прижимной валик 6 поджимается к транспортирующему валику 5 для помещения запечатываемого листа между ним и транспортирующим валиком 5, тем самым осуществляя транспортирование запечатываемого листа.
[0022] Печатающая головка 7 выполняет печать на запечатываемом листе 1, транспортируемом посредством транспортирующего валика 5 и прижимного валика 6. В этом варианте осуществления будет иллюстрирована струйная печатающая головка, которая выполняет печать запечатываемого листа 1 посредством вывода чернил из печатающей головки. Пластина 8 поддерживает обратную поверхность запечатываемого листа 1 в положении, обращенном к печатающей головке 7. На каретке 10 смонтирована печатающая головка 7 и перемещается в направлении, пересекающем направление транспортирования листа.
[0023] Выводной валик 9 выводит запечатываемый лист, напечатанный посредством печатающей головки 7, за пределы устройства. Шестерни 12 и 13 вращаются при их нахождении в контакте с запечатываемой поверхностью запечатываемого листа, печатаемого посредством печатающей головки 7. Шестерня 13 со стороны вывода поджимается к выводному валику 9, и никакой выводной валик 9 не размещен в положении, обращенном к шестерне 12 со стороны впуска. Шестерня 12 используется для предотвращения смещения запечатываемого листа 1 и также упоминается как прижимная шестерня.
[0024] Направляющая 15 транспортирования направляет запечатываемый лист 1 между частью подающего зазора, сформированной посредством подающего валика 3 и ведомого подающего валика 4, и частью транспортирующего зазора, сформированной посредством транспортирующего валика 5 и прижимного валика 6. Датчик обнаружения 16 листов обнаруживает передний край и задний край запечатываемого листа 1. Датчик 16 обнаружения листов обеспечен после подающего валика 3 в направлении транспортирования листов. Рычаг 17 для прижатия листов обеспечивает наложение переднего края следующего листа на задний край предыдущего листа. Рычаг 17 для прижатия листов отклоняется посредством пружины вокруг вращающегося вала 17b в направлении против часовой стрелки на Фиг. 1.
[0025] Фиг. 4A и 4B иллюстрируют виды для объяснения конструкции отделяющего валика 2. Как было описано выше, отделяющий валик 2 вплотную примыкает к верхнему запечатываемому листу, уложенному в стопку на подающем лотке 11 для выполнения его отделения. Ведущий вал 19 передает движение подающего двигателя (который будет описан позже) на отделяющий валик 2. При отделении запечатываемого листа ведущий вал 19 и отделяющий валик 2 вращаются в направлении, обозначенном посредством стрелки на Фиг. 4A и 4B. Выступ 19a сформирован на ведущем вале 19. Вогнутая часть 2c, в которую точно входит выступ 19a, сформирована на отделяющем валике 2. Как изображено на Фиг. 4A, когда выступ 19a вплотную примыкает к первой поверхности 2a вогнутой части 2c отделяющего валика 2, движение ведущего вала 19 передается на отделяющий валик 2. В этом случае, при приведении в движение ведущего вала 19, также осуществляется вращение отделяющего валика 2. С другой стороны, как изображено на Фиг. 4B, когда выступ 19a вплотную примыкает ко второй поверхности 2b вогнутой части 2c отделяющего валика 2, движение ведущего вала 19 не передается на отделяющий валик 2. В этом случае, даже при приведении в движение ведущего вала 19, отделяющий валик 2 не вращается. Кроме того, когда выступ 19a сформирован между первой поверхностью 2a и второй поверхностью 2b, без примыкания вплотную к первой поверхности 2a или второй поверхности 2b, даже при приведении в движение ведущего вала 19, отделяющий валик 2 не вращается.
[0026] Фиг. 5 иллюстрирует блок-схему, изображающую устройство печати согласно этому варианту осуществления. MPU 201 управляет операцией каждого блока, обработкой данных и т.п. Как будет описано позже, MPU 201 также функционирует в качестве механизма управления транспортированием, способного управлять транспортированием запечатываемых листов так, чтобы задний край предыдущего листа и передний край следующего листа накладывались друг на друга. В ROM 202 хранятся данные и программы, которые должны быть выполнены посредством MPU 201. В RAM 203 временно хранятся данные обработки, которая должна быть выполнена посредством MPU 201, и данные, принятые из хост-компьютера 214.
[0027] Формирователь 207 сигналов управления печатающей головкой управляет печатающей головкой 7. Формирователь 208 сигналов управления двигателем каретки управляет двигателем каретки 204 для приведения в движение каретки 10. Транспортирующий двигатель 205 приводит в движение транспортирующий валик 5 и выводной валик 9. Формирователь 209 сигналов управления транспортирующим двигателем управляет транспортирующим двигателем 205. Подающий двигатель 206 приводит в движение отделяющий валик 2 и подающий валик 3. Формирователь 210 сигналов управления подающим двигателем управляет подающим двигателем 206.
[0028] В хост-компьютере 214 формирователь 2141 сигналов управления принтером используется для взаимодействия с устройством печати, посредством сбора информации о печати, такой как печатаемое изображение и качество печатаемого изображения, когда пользователь подает команду на выполнение операции печати. MPU 201 обменивается печатаемым изображением и т.п. с хост-компьютером 214 через блок 213 I/F.
[0029] Операция непрерывной подачи с наложением будет описана во временной последовательности со ссылкой на ST1 по ST9 из Фиг. 1-3. Когда хост-компьютер 214 передает данные печати через блок 213 I/F, данные печати обрабатываются посредством MPU 201, а затем загружаются в RAM 203. MPU 201 запускает операцию печати на основе загруженных данных.
[0030] Будет предоставлено описание со ссылкой на ST1 из Фиг. 1. Формирователь 210 сигналов управления подающим двигателем приводит в движение подающий двигатель 206 с низкой скорость. Посредством этого отделяющий валик 2 вращается со скоростью 7,6 дюймов в секунду. При вращении отделяющего валика 2 выполняется отделение верхнего запечатываемого листа (предыдущего листа 1-A), уложенного в стопку на подающем лотке 11. Предыдущий лист 1-A, отделенный посредством отделяющего валика 2, транспортируется посредством подающего валика 3, вращающегося в том же самом направлении, что и отделяющий валик 2. Подающий двигатель 206 также приводит в движение подающий валик 3. В этом варианте осуществления будет иллюстрирована конструкция, включающая в себя отделяющий валик 2 и подающий валик 3. Однако может быть выбрана конструкция, включающая в себя только подающий валик для подачи запечатываемого листа, уложенного в стопку на листоприемном блоке.
[0031] Когда датчик 16 обнаружения листов, обеспеченный на стороне вывода подающего валика 3, обнаруживает передний край предыдущего листа 1-A, подающий двигатель 206 переключается на приведение в движение с высокой скоростью. Таким образом, отделяющий валик 2 и подающий валик 3 вращаются со скоростью 20 дюймов в секунду.
[0032] Будет предоставлено описание со ссылкой на ST2 из Фиг. 1. При непрерывном вращении подающего валика 3 передний край предыдущего листа 1-A поворачивает рычаг 17 для прижатия листов вокруг вращающегося вала 17b в направлении по часовой стрелке против отклоняющей силы пружины. При дальнейшем непрерывном вращении подающего валика 3 передний край предыдущего листа 1-A вплотную примыкает к части транспортирующего зазора, сформированной посредством транспортирующего валика 5 и прижимного валика 6. В это время транспортирующий валик 5 останавливается. Посредством вращения подающего валика 3 на предварительно определенную величину даже после того, как передний край предыдущего листа 1-A вплотную примыкает к части транспортирующего зазора, выполняется выравнивание предыдущего листа 1-A для коррекции перекоса, в то время как передний край предыдущего листа 1-A вплотную примыкает к части транспортирующего зазора. Операция коррекции перекоса также будет упоминаться как операция регулирования совмешения.
[0033] Будет предоставлено описание со ссылкой на ST3 из Фиг. 1. В конце операции коррекции перекоса предыдущего листа 1-A транспортирующий двигатель 205 приводится в движение для начала вращения транспортирующего валика 5. Транспортирующий валик 5 транспортирует лист со скоростью 15 дюймов в секунду. После выравнивания предыдущего листа 1-A с положением, обращенным к печатающей головке 7, выполняется операция печати посредством вывода чернил из печатающей головки 7 на основе данных печати. Отметим, что операция выравнивания выполняется посредством обеспечения плотного примыкания переднего края запечатываемого листа к части транспортирующего зазора для временного позиционирования запечатываемого листа в положение транспортирующего валика 5 и управления величиной вращения транспортирующего валика 5 со ссылкой на положение транспортирующего валика 5.
[0034] Устройство печати из этого варианта осуществления является последовательным печатающим устройством, в котором на каретке 10 смонтирована печатающая головка 7. Операция печати на запечатываемом листе выполняется посредством повторения операции транспортирования, подразумевающей дискретную передачу предварительно определенной величины запечатываемого листа с использованием транспортирующего валика 5 и операции формирования изображения, подразумевающей вывод чернил из печатающей головки 7 одновременно с перемещением каретки 10, в которой смонтирована печатающая головка 7, при остановке транспортирующего валика 5.
[0035] При выполнении выравнивания предыдущего листа 1-A подающий двигатель 206 переключается на приведение в движение с меньшей скоростью. То есть отделяющий валик 2 и подающий валик 3 вращаются со скоростью 7,6 дюймов в секунду. Во время дискретного транспортирования транспортирующим валиком 5 предварительно определенной величины запечатываемого листа подающий двигатель 206 также дискретно приводит в движение подающий валик 3. То есть во время вращения транспортирующего валика 5 также осуществляется вращение подающего валика 3. Во время остановки транспортирующего валика 5 также останавливается и подающий валик 3. Скорость вращения подающего валика 3 ниже, чем скорость вращения транспортирующего валика 5. Следовательно, лист растягивается между транспортирующим валиком 5 и подающим валиком 3. Подающий валик 3 вращается вместе с запечатываемым листом, транспортируемым посредством транспортирующего валика 5.
[0036] Поскольку подающий двигатель 206 дискретно приводится в движение, также приводится в движение и ведущий вал 19. Как было описано выше, скорость вращения отделяющего валика 2 ниже, чем скорость вращения транспортирующего валика 5. Следовательно, отделяющий валик 2 вращается вместе с запечатываемым листом, транспортирование которого осуществляется посредством транспортирующего валика 5. Таким образом, отделяющий валик 2 вращается перед ведущим валом 19. Более конкретно, выступ 19a ведущего вала 19 расположен на расстоянии от первой поверхности 2a и вплотную примыкает ко второй поверхности 2b. Следовательно, второй запечатываемый лист (следующий лист 1-B) не отделяется вскоре после прохождения заднего края предыдущего листа 1-A через отделяющий валик 2. После приведения в движение ведущего вала 19 в течение предварительно определенного времени выступ 19a вплотную примыкает к первой поверхности 2a, и начинается вращение отделяющего валика 2.
[0037] Будет предоставлено описание со ссылкой на ST4 из Фиг. 2. В ST4 изображено состояние, в котором отделяющий валик 2 начинает вращение и выполняет отделение следующего листа 1-B. Вследствие такого фактора, как чувствительность датчика, датчику 16 обнаружения листов требуется предварительно определенный интервал, или более, между запечатываемыми листами для обнаружения краев запечатываемых листов. То есть необходимо выполнять отделение переднего края следующего листа 1-B от заднего края предыдущего листа 1-A на предварительно определенное расстояние для обеспечения предварительно определенного временного интервала от момента обнаружения датчиком 16 обнаружения листов заднего края предыдущего листа 1-A до момента обнаружения им переднего края следующего листа 1-B. Для достижения этого угол вогнутой части 2c отделяющего валика 2 установлен приблизительно на 70°.
[0038] Будет предоставлено описание со ссылкой на ST5 из Фиг. 2. Следующий лист 1-B, отделенный посредством отделяющего валика 2, транспортируется посредством подающего валика 3. В это время предыдущий лист 1-A подвергается операции формирования изображения посредством печатающей головки 7 на основе данных печати. Когда датчик 16 обнаружения листов обнаруживает передний край следующего листа 1-B, подающий двигатель 206 переключается на приведение в движение с высокой скоростью. Таким образом, отделяющий валик 2 и подающий валик 3 вращаются со скоростью 20 дюймов в секунду.
[0039] Будет предоставлено описание со ссылкой на ST6 Фиг. 2. Рычаг 17 для прижатия листов прижимает задний край предыдущего листа 1-A вниз, как изображено на ST5 из Фиг. 2. Можно сформировать состояние, в котором передний край следующего листа 1-B накладывается на задний край предыдущего листа 1-A посредством перемещения следующего листа 1-B со скоростью выше, чем скорость, с которой предыдущий лист 1-A перемещается в сторону вывода посредством операции печати печатающей головки 7 (ST6 из Фиг. 2). Поскольку предыдущий лист 1-A подвергается операции печати на основе данных печати, то выполняется его дискретное транспортирование посредством транспортирующего валика 5. С другой стороны, после обнаружения датчиком 16 обнаружения листов переднего края следующего листа 1-B, следующий лист 1-B может приблизиться к предыдущему листу 1-A посредством непрерывного вращения подающего валика 3 со скоростью 20 дюймов в секунду.
[0040] Будет предоставлено описание со ссылкой на ST7 Фиг. 3. После формирования состояния наложения, в котором передний край следующего листа 1-B накладывается на задний край предыдущего листа 1-A, выполняется транспортирование следующего листа 1-B посредством подающего валика 3 до тех пор, пока передний край следующего листа 1-B не остановится в предварительно определенном положении перед частью транспортирующего зазора. Положение переднего края следующего листа 1-B вычисляется из величины вращения подающего валика 3 после обнаружения датчиком 16 обнаружения листов переднего края следующего листа 1-B и управляется на основе результата вычисления. В это время предыдущий лист 1-A подвергается операции формирования изображения на основе данных печати посредством печатающей головки 7.
[0041] Будет предоставлено описание со ссылкой на ST8 Фиг. 3. Когда транспортирующий валик 5 останавливает выполнение операции формирования изображения (операцию вывода чернил) последнего ряда предыдущего листа 1-A, подающий валик 3 обеспечивает плотное примыкание переднего края запечатываемого листа 1-B к части транспортирующего зазора, тем самым выполняя операцию коррекции перекоса следующего листа 1-B.
[0042] Будет предоставлено описание со ссылкой на ST9 из Фиг. 3. По завершении операции формирования изображения последнего ряда предыдущего листа 1-A возможно выполнение выравнивания следующего листа 1-B, при сохранении состояния, в котором следующий лист 1-B накладывается на предыдущий лист 1-A посредством вращения транспортирующего валика 5 на предварительно определенную величину. Следующий лист 1-B подвергается операции печати посредством печатающей головки 7 на основе данных печати. При дискретном транспортировании следующего листа 1-B для выполнения операции печати предыдущий лист 1-A также дискретно транспортируется и, в итоге, выводится за пределы печатающего устройства посредством выводного валика 9.
[0043] При выполнении выравнивания следующего листа 1-B подающий двигатель 206 переключается на приведение в движение с меньшей скоростью. То есть отделяющий валик 2 и подающий валик 3 вращаются со скоростью 7,6 дюймов в секунду. Если имеются данные печати даже после следующего листа 1-B, процесс возвращается на ST4 из Фиг. 2 для отделения третьего запечатываемого листа.
[0044] Фиг. 6A и 6B иллюстрируют блок-схемы последовательности операций, иллюстрирующие операцию непрерывной подачи с наложением согласно этому варианту осуществления. На этапе S1, когда хост-компьютер 214 осуществляет передачу данных печати через блок 213 I/F, начинается операция печати. На этапе S2 начинается операция подачи предыдущего листа 1-A. Более конкретно, подающий двигатель 206 приводится в движение с низкой скоростью. Отделяющий валик 2 вращается со скоростью 7,6 дюймов в секунду. Отделяющий валик 2 выполняет отделение предыдущего листа 1-A, а подающий валик 3 выполняет подачу предыдущего листа 1-A в направлении печатающей головки 7.
[0045] На этапе S3 датчик 16 обнаружения листов обнаруживает передний край предыдущего листа 1-A. При обнаружении датчиком 16 обнаружения листов переднего края предыдущего листа 1-A на этапе S4 подающий двигатель 206 переключается на приведение в движение с высокой скоростью. То есть отделяющий валик 2 и подающий валик 3 вращаются со скоростью 20 дюймов в секунду. На этапе S5, посредством управления величиной вращения подающего валика 3 после обнаружения датчиком 16 обнаружения листов переднего края предыдущего листа 1-A, обеспечивается плотное примыкание переднего края предыдущего листа 1-A части транспортирующего зазора для выполнения операции коррекции перекоса предыдущего листа 1-A.
[0046] На этапе S6 выравнивание предыдущего листа 1-A выполняется на основе данных печати. То есть предыдущий лист 1-A транспортируется в положение начала печати относительно положения транспортирующего валика 5 на основе данных печати посредством управления величиной вращения транспортирующего валика 5. На этапе S7 подающий двигатель 206 переключается на приведение в движение с меньшей скоростью. На этапе S8 начинается операция печати, когда печатающая головка 7 выводит чернила на предыдущий лист 1-A. Более конкретно, операция печати предыдущего листа 1-A выполняется посредством повторения операции транспортирования дискретно транспортируемого предыдущего листа 1-A посредством транспортирующего валика 5 и операции формирования изображения (операции вывода чернил), подразумевающей вывод чернил из печатающей головки 7 посредством перемещения каретки 10. Подающий двигатель 206 дискретно приводится в движение с низкой скоростью синхронно с операцией дискретного транспортирования предыдущего листа 1-A посредством транспортирующего валика 5. То есть отделяющий валик 2 и подающий валик 3 дискретно вращаются со скоростью 7,6 дюймов в секунду.
[0047] На этапе S9 определяется, имеются ли данные печати следующей страницы. Если нет никаких данных печати следующей страницы, то процесс переходит на этап S25. По завершении операции печати предыдущего листа 1-A на этапе S25, на этапе S26 выполняется вывод предыдущего листа 1-A, тем самым завершая операцию печати.
[0048] Если имеются данные печати следующей страницы, то на этапе S10 начинается операция подачи следующего листа 1-B. Более конкретно, отделяющий валик 2 выполняет отделение следующего листа 1-B, и подающий валик 3 выполняет подачу следующего листа 1-B в направлении печатающей головки 7. Отделяющий валик 2 вращается со скоростью 7,6 дюймов в секунду. Как было описано выше, поскольку большая вогнутая часть 2c отделяющего валика 2 обеспечена относительно выступа 19a ведущего вала 19, следующий лист 1-B подается при наличии предварительно определенного интервала относительно заднего края предыдущего листа 1-A.
[0049] На этапе S11 датчик 16 обнаружения листов обнаруживает передний край следующего листа 1-B. Когда датчик 16 обнаружения листов обнаруживает передний край следующего листа 1-B, на этапе S12 подающий двигатель 206 переключается на приведение в движение с высокой скоростью. Таким образом, отделяющий валик 2 и подающий валик 3 вращаются со скоростью 20 дюймов в секунду. На этапе S13, посредством управления величиной вращения подающего валика 3 после обнаружения датчиком 16 обнаружения листов переднего края следующего листа 1-B, следующий лист 1-B транспортируется так, чтобы его передний край находился в положении, находящемся на предварительно определенном расстоянии перед частью транспортирующего зазора. Предыдущий лист 1-A дискретно транспортируется на основе данных печати. Непрерывное приведение в движение подающего двигателя 206 с высокой скоростью формирует состояние наложения, в котором передний край следующего листа 1-B накладывается на задний край предыдущего листа 1-A.
[0050] На этапе S14 определяется, удовлетворяются ли предварительно определенные условия (которые будут описаны позже). Если предварительно определенные условия удовлетворены, то на этапе S15 определятся, началась ли операция формирования изображения предыдущего листа 1-A. Если определено, что операция формирования изображения началась, то процесс переходит на этап S16; иначе, процесс приостанавливается до начала операции формирования изображения. На этапе S16, обеспечивается плотное примыкание переднего края следующего листа 1-B к части транспортирующего зазора, при сохранении состояния наложения, тем самым выполняя операцию коррекции перекоса следующего листа 1-B. Если на этапе S17 определено, что операция формирования изображения последнего ряда предыдущего листа 1-A завершена, то на этапе S18 выполняется выравнивание следующего листа 1-B, при сохранении состояния наложения.
[0051] Если на этапе S14 определено, что предварительно определенные условия не удовлетворены, то состояние наложения отменяется для выполнения выравнивания следующего листа 1-B. Более конкретно, если на этапе S27 определено, что операция формирования изображения последнего ряда предыдущего листа 1-A завершена, то на этапе S28 выполняется операция вывода предыдущего листа 1-A. В ходе этой операции подающий двигатель 206 не приводится в движение, и, таким образом, следующий лист 1-B останавливается, в то время как его передний край находится в положении с предварительно определенной величиной перед частью транспортирующего зазора. Как только выполняется вывод предыдущего листа 1-A, состояние наложения отменяется. На этапе S29 обеспечивается плотное примыкание переднего края следующего листа 1-B к части транспортирующего зазора для выполнения операции коррекции перекоса следующего листа 1-B. На этапе S18 выполняется выравнивание следующего листа 1-B.
[0052] На этапе S19 подающий двигатель 206 переключается на приведение в движение с меньшей скоростью. На этапе S20, операция печати начинается посредством вывода чернил из печатающей головки 7 на следующий лист 1-B. Более конкретно, операция печати следующего листа 1-B выполняется посредством повторения операции транспортирования дискретного транспортирования следующего листа 1-B посредством транспортирующего валика 5 и операции формирования изображения (операции вывода чернил), подразумевающей вывод чернил из печатающей головки 7 посредством перемещения каретки 10. Подающий двигатель 206 дискретно приводится в движение с низкой скоростью синхронно с операцией дискретного транспортирования следующего листа 1-B посредством транспортирующего валика 5. То есть отделяющий валик 2 и подающий валик 3 дискретно вращаются со скоростью 7,6 дюймов в секунду.
[0053] На этапе S21 определяется, имеются ли данные печати следующей страницы. В случае наличия данных печати следующей страницы, процесс возвращается на этап S10. Если нет никаких данных печати следующей страницы, по завершении на этапе S22 операции формирования изображения следующего листа 1-B, то на этапе S23 выполняется операция вывода следующего листа 1-B и на этапе S24 завершается операция печати.
[0054] Фиг. 7 и 8 иллюстрируют виды для объяснения операции выполнения наложения следующего листа на предыдущий лист согласно этому варианту осуществления. Будет описана операция формирования состояния наложения, в котором передний край следующего листа накладывается на задний край предыдущего листа, что было объяснено на этапах S12 и S13 из Фиг. 6.
[0055] Фиг. 7 и 8 иллюстрируют увеличенные виды, каждый из которых изображает часть, находящуюся между частью подающего зазора, сформированной посредством подающего валика 3 и ведомого подающего валика 4, и частью транспортирующего зазора, сформированной посредством транспортирующего валика 5 и прижимного валика 6.
[0056] Далее будут последовательно описаны три состояния в процессе транспортирования запечатываемых листов посредством транспортирующего валика 5 и подающего валика 3. Первое состояние, в котором выполняется операция, подразумевающая обеспечение следования следующего листа за предыдущим листом, будет описано со ссылкой на ST1 и ST2 из Фиг. 7. Второе состояние, в котором выполняется операция, подразумевающая обеспечение наложения следующего листа на предыдущий лист, будет описано со ссылкой на ST3 и ST4 из Фиг. 8. Третье состояние, в котором определяется, выполнять ли операцию коррекции перекоса следующего листа, при сохранении состояния наложения, будет описано со ссылкой на ST5 из Фиг. 8.
[0057] В ST1 из Фиг. 7, подающий валик 3 управляется для выполнения транспортирования следующего листа 1-B, а датчик 16 обнаружения листов обнаруживает передний край следующего листа 1-B. Секция датчика 16 обнаружения листов до положения P1, в котором может быть обеспечено наложение следующего листа 1-B на предыдущий лист 1-A, определяется как первая секция A1. В первой секции A1 выполняется операция обеспечения следования переднего края следующего листа 1-B за задним краем предыдущего листа 1-A. Положение P1 определяется на основе конструкции механизма.
[0058] В первом состоянии операция следования может остановиться в первой секции A1. Если, как изображено на ST2 из Фиг. 7, передний край следующего листа 1-B проходит задний край предыдущего листа 1-A до положения P1, то операция, подразумевающая обеспечение наложения следующего листа на предыдущий лист, не выполняется.
[0059] В ST3 из Фиг. 8, секция от вышеописанного положения P1 до положения P2, в которой обеспечен рычаг 17 для прижатия листов, определяется как вторая секция A2. Во второй секции A2 выполняется операция обеспечения наложения следующего листа 1-B на предыдущий лист 1-A.
[0060] Во втором состоянии операция обеспечения наложения следующего листа на предыдущий лист может остановиться во второй секции A2. Если, как изображено на ST4 из Фиг. 8, передний край следующего листа 1-B не может догнать задний край предыдущего листа 1-A в пределах второй секции A2, невозможно выполнить операцию наложения следующего листа на предыдущий лист.
[0061] В ST5 из Фиг. 8, секция от вышеописанного положения P2 до положения P3 определяется как третья секция A3. Положение P3 является положением переднего края следующего листа, когда следующий лист останавливается на этапе S13 из Фиг. 6. Во время наложения следующего листа 1-B на предыдущий лист 1-A, следующий лист 1-B транспортируется так, чтобы его передний край достиг положения P3. В третьем блоке A3 определяется, выполнять ли выравнивание следующего листа 1-B посредством обеспечения его плотного примыкания к части транспортирующего зазора, при сохранении состояния наложения. То есть определяется, выполнять ли выравнивание следующего листа посредством выполнения операции коррекции перекоса при сохранении состояния наложения или выполнять выравнивание следующего листа посредством отмены состояния наложения и выполнения операции коррекции перекоса.
[0062] Фиг. 9 иллюстрирует блок-схему последовательности операций для объяснения операции коррекции перекоса следующего листа согласно этому варианту осуществления. Далее будет подробно описана обработка, подразумевающая определение того, удовлетворяются ли предварительно определенные условия, которые были объяснены на этапе S14 из Фиг. 6.
[0063] Ниже будет описана операция определения того, выполнять ли операцию коррекции перекоса посредством обеспечения плотного примыкания переднего края следующего листа 1-B к части транспортирующего зазора, при сохранении состояния наложения между предыдущим листом 1-A и следующим листом 1-B, или выполнять операцию коррекции перекоса посредством отмены состояния наложения между предыдущим листом 1-A и следующим листом 1-B и последующего обеспечения плотного примыкания переднего края следующего листа 1-B к части транспортирующего зазора.
[0064] На этапе S101 операция начинается. На этапе S102 определяется, достиг ли передний край следующего листа 1-B положения определения (положения P3 в ST5 из Фиг. 8). Если передний край следующего листа 1-B не достиг положения определения (НЕТ на этапе S102), то имеются сомнения в том, примыкает ли передний край следующего листа 1-B вплотную к части транспортирующего зазора посредством транспортирования следующего листа 1-B на предварительно определенную величину, и, таким образом, принимается решение о выполнении операции коррекции перекоса только для следующего листа (этап S103), тем самым завершая операцию определения (этап S104). То есть после прохождения заднего края предыдущего листа 1-A через часть транспортирующего зазора обеспечивается плотное примыкание только следующего листа 1-B к части транспортирующего зазора для выполнения операции коррекции перекоса, а затем выполняется выравнивание только следующего листа 1-B.
[0065] С другой стороны, если определено, что передний край следующего листа 1-B достиг положения P3 определения (ДА на этапе S102), то определяется, прошел ли задний край предыдущего листа 1-A через часть транспортирующего зазора (этап S105). Если определено, что задний край предыдущего листа 1-A прошел через часть транспортирующего зазора (ДА на этапе S105), то следующий лист не накладывается на предыдущий лист, и, таким образом, принимается решение о выполнении операции коррекции перекоса только для следующего листа (этап S106). То есть обеспечивается плотное примыкание только следующего листа 1-B к части транспортирующего зазора для выполнения операции коррекции перекоса, а затем выполняется выравнивание только следующего листа 1-B
[0066] С другой стороны, если определено, что задний край предыдущего листа 1-A не прошел через часть транспортирующего зазора (НЕТ на этапе S105), то определяется, является ли величина наложения заднего края предыдущего листа 1-A на передний край следующего листа 1-B меньшей, чем пороговое значение (этап S107). Положение заднего края предыдущего листа 1-A обновляется одновременно с выполнением операции печати предыдущего листа 1-A. Положение переднего края следующего листа 1-B находится в вышеописанном положении определения. То есть величина наложения уменьшается одновременно с выполнением операции печати предыдущего листа 1-A. Если определено, что величина наложения, меньше, чем пороговое значение (ДА на этапе S107), то состояние наложения отменяется и принимается решение о выполнении операции коррекции перекоса только для следующего листа (этап S108). То есть после завершения операции формирования изображения предыдущего листа 1-A следующий лист 1-B не транспортируется вместе с предыдущим листом 1-A. Более конкретно, транспортирующий двигатель 205 приводит в движение транспортирующий валик 5 для выполнения транспортирования предыдущего листа 1-A. Однако подающий валик 3 не приводится в движение. Следовательно, состояние наложения отменяется. Кроме того, обеспечивается плотное примыкание только следующего листа 1-B к части транспортирующего зазора для выполнения операции коррекции перекоса, а затем выполняется выравнивание только следующего листа 1-B.
[0067] Если определено, что величина наложения равна или больше порогового значения (НЕТ на этапе S107), то определяется, достигает ли следующий лист 1-B прижимной шестерни 12 при выполнении выравнивания следующего листа 1-B (этап S109). Если определено, что следующий лист 1-B не достигает прижимной шестерни 12 (НЕТ на этапе S109), то состояние наложения отменяется и принимается решение о выполнении операции коррекции перекоса только для следующего листа (этап S110). То есть после завершения операции формирования изображения предыдущего листа 1-A следующий лист 1-B не транспортируется вместе с предыдущим листом 1-A. Более конкретно, транспортирующий двигатель 205 приводит в движение транспортирующий валик 5 для транспортирования предыдущего листа 1-A. Однако подающий валик 3 не приводится в движение. Следовательно, состояние наложения отменено. Кроме того, обеспечивается плотное примыкание только следующего листа 1-B к части транспортирующего зазора для выполнения операции коррекции перекоса, а затем выполняется выравнивание только следующего листа 1-B.
[0068] Если определено, что следующий лист 1-B достиг прижимной шестерни 12 (ДА на этапе S109), то определяется, имеется ли промежуток между последним рядом предыдущего листа и рядом, находящимся непосредственно после последнего ряда (этап S111). Если определено, что нет никакого промежутка (НЕТ на этапе S111), то состояние наложения отменяется, и принимается решение о выполнении операции коррекции перекоса только следующего листа (этап S112). Если определено, что имеется промежуток (ДА на этапе S111), то выполняется операция коррекции перекоса следующего листа 1-B, при сохранении состояния наложения, и выполняется выравнивание следующего листа 1-B. То есть после завершения операции формирования изображения предыдущего листа 1-A обеспечивается плотное примыкание следующего листа 1-B к части транспортирующего зазора, при выполнении наложения на предыдущий лист 1-A. Более конкретно, транспортирующий валик 5 и подающий валик 3 вращаются посредством приведения в движение подающего двигателя 206 вместе с транспортирующим двигателем 205. После операции коррекции перекоса, выполняется выравнивание следующего листа 1-B при наложении следующего листа 1-B на предыдущий лист 1-A.
[0069] Как было описано выше, выполняется операция определения, сохранять ли или отменять состояние наложения между предыдущим листом 1-A и следующим листом 1-B.
[0070] Фиг. 10 иллюстрирует блок-схему последовательности операций для объяснения последовательности вычисления положения переднего края следующего листа после выравнивания следующего листа согласно этому варианту осуществления.
[0071] На этапе S201 процесс начинается. На этапе S202 в область печати загружается формат листа. Поскольку задано самое верхнее положение печати, то есть верхний оконечный край, верхний оконечный край области печати устанавливается в качестве переднего края (этап S203). Отметим, что положение переднего края определяется расстоянием от части транспортирующего зазора.
[0072] Загружаются первые данные печати (этап S204). При этой обработке задается положение первых данных печати относительно переднего края листа (обнаружение непечатаемой области), и, таким образом, определяется, является ли расстояние между передним краем листа и первыми данными печати большим, чем установленное ранее положение переднего края (этап S205). Если расстояние между передним краем листа и первыми данными печати больше, чем установленное ранее положение переднего края (ДА на этапе S205), то положение переднего края корректируется на расстояние между передним краем листа и первыми данными печати (этап S206). Если расстояние между передним краем листа и первыми данными печати меньше или равно ранее установленному положению переднего края (НЕТ на этапе S205), то процесс переходит на этап S207.
[0073] Затем генерируется первая команда на перемещение каретки (этап S207). Определяется, является ли величина транспортирования листа для первого перемещения каретки большей, чем ранее установленное положение переднего края (этап S208). Если величина транспортирования листа для первого перемещения каретки больше, чем ранее установленное положение переднего края (ДА на этапе S208), то положение переднего края корректируется на величину транспортирования листа для первого перемещения каретки (этап S209). Если величина транспортирования листа для первого перемещения каретки меньше или равна ранее установленному положению переднего края (НЕТ на этапе S208), то положение переднего края не корректируется. Таким образом, положение переднего края следующего листа 1-B подтверждается (этап S210), и процесс завершается (этап S211). На основе подтвержденного положения переднего края возможно определить (этап S109 из Фиг. 9), достигает ли следующий лист 1-B прижимной шестерни 12, при выполнении выравнивания следующего листа B.
[0074] Как было описано выше, в соответствии с вышеупомянутым вариантом осуществления посредством определения, выполнять ли транспортирование следующего листа в положение, обращенное к печатающей головке 7, при сохранении положения наложения, если обеспечивается наложение переднего края следующего листа 1-B на задний край предыдущего листа 1-A, то возможно начать подачу следующего листа, даже если величина поля заднего края предыдущего листа 1-A и величина поля переднего края следующего листа не подтверждены.
[0075] При выполнении операции печати предыдущего листа 1-A посредством печатающей головки 7, подающий двигатель 206 приводится в движение синхронно с транспортирующим двигателем 205 до обнаружения датчиком 16 обнаружения листов переднего края следующего листа 1-B, и подающий двигатель 206 непрерывно приводится в движение после обнаружения датчиком 16 обнаружения листов переднего края следующего листа, тем самым обеспечивая возможность выполнения операции следования для обеспечения наложения следующего листа на предыдущий лист.
Другие варианты осуществления
[0076] Вариант(ы) осуществления настоящего изобретения также могут быть реализованы посредством компьютера из системы или устройства, которое считывает и выполняет выполнимые компьютером команды (например, одну или более программ), записанных на носителе данных (который также может быть упомянут, в более развернутом виде, как энергонезависимый машиночитаемый носитель данных), для выполнения функции одного или более вышеописанного варианта(ов) осуществления, и/или оно включает в себя одну или более схемы (например, специализированные интегральные микросхемы (микросхемы ASIC)) для выполнения функций одного или более вышеописанного варианта(ов) осуществления, и посредством способа, выполнимого посредством компьютера системы или устройства посредством, например, считывания и выполнения выполнимых компьютером команд с носителя данных, для выполнения функции одного или более вышеописанного варианта(ов) осуществления и/или управления одной или более схемами для выполнения функции одного или более вышеописанного варианта(ов) осуществления. Компьютер может содержать один или более процессоров (например, центральный процессор (CPU), микропроцессор (MPU)) и может включать в себя сеть отдельных компьютеров или отдельных процессоров для считывания и выполнения выполнимых компьютером команд. Выполнимые компьютером команды могут быть предоставлены на компьютер, например, из сети или носителя данных. Носитель данных может включать в себя, например, один или более жестких дисков, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), запоминающее устройство распределенных вычислительных систем, оптический диск (такой, как компакт-диск (CD), цифровой универсальный диск (DVD), или диск Blu-ray (BD)™), устройство флэш-памяти, карта памяти и т.п.
[0077] Несмотря на то, что настоящее изобретение было описано со ссылкой на иллюстративные варианты осуществления, следует понимать, что изобретение не ограничено раскрытыми иллюстративными вариантами осуществления. Объем следующей формулы изобретения должен получить самую широкую интерпретацию для того, чтобы охватывать все такие модификации и эквивалентные структуры и функции.
Реферат
Устройство печати включает в себя подающий валик, выполненный с возможностью подачи запечатываемого листа, уложенного в стопку на листоприемном блоке, транспортирующий валик, выполненный с возможностью транспортирования запечатываемого листа, подаваемого посредством подающего валика, печатающий блок, выполненный с возможностью печати на запечатываемом листе, транспортируемом посредством транспортирующего валика, блок управления транспортированием, выполненный с возможностью управления транспортированием запечатываемых листов так, чтобы задний край предыдущего листа, в качестве запечатываемого листа, поданного ранее из листоприемного блока, и передний край следующего листа, в качестве запечатываемого листа поданного следующим из листоприемного блока, накладывались друг на друга, и блок определения, выполненный с возможностью определения, выполнять ли транспортирование следующего листа в положение, обращенное к печатающему блоку, при сохранении состояния наложения между предыдущим листом и следующим листом. Предложенное решение обеспечивает устройство печати, которое может начинать подачу следующего листа, даже при отсутствии подтверждения величины поля заднего края предыдущего листа и величины поля переднего края следующего листа. 2 н. и 6 з.п. ф-лы, 10 ил.
Комментарии