Печатающее устройство и способ управления перемещением объектов - RU2413621C1
Код документа: RU2413621C1
Чертежи











Описание
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Область техники, к которой относится изобретение
Настоящее изобретение относится к печатающему устройству, которое печатает изображение на объекте, например печатном носителе, наряду с перемещением объекта относительно печатающей головки, а также к способу управления перемещением объекта, например печатного носителя. В частности, настоящее изобретение относится к конструкции и способу для обнаружения расстояния, которое прошел объект, например печатный носитель, и скорости объекта с высокой точностью.
Описание предшествующего уровня техники
В печатающем устройстве, которое печатает изображение на печатном носителе, используя печатающую головку при движении печатного носителя, чтобы напечатать изображение высокого качества с большей точностью, требуется повышение точности перемещения печатного носителя. Например, патент США № 5149980 и патент США № 7104710 раскрывают технологию для оптического измерения фактического расстояния, пройденного печатным носителем.
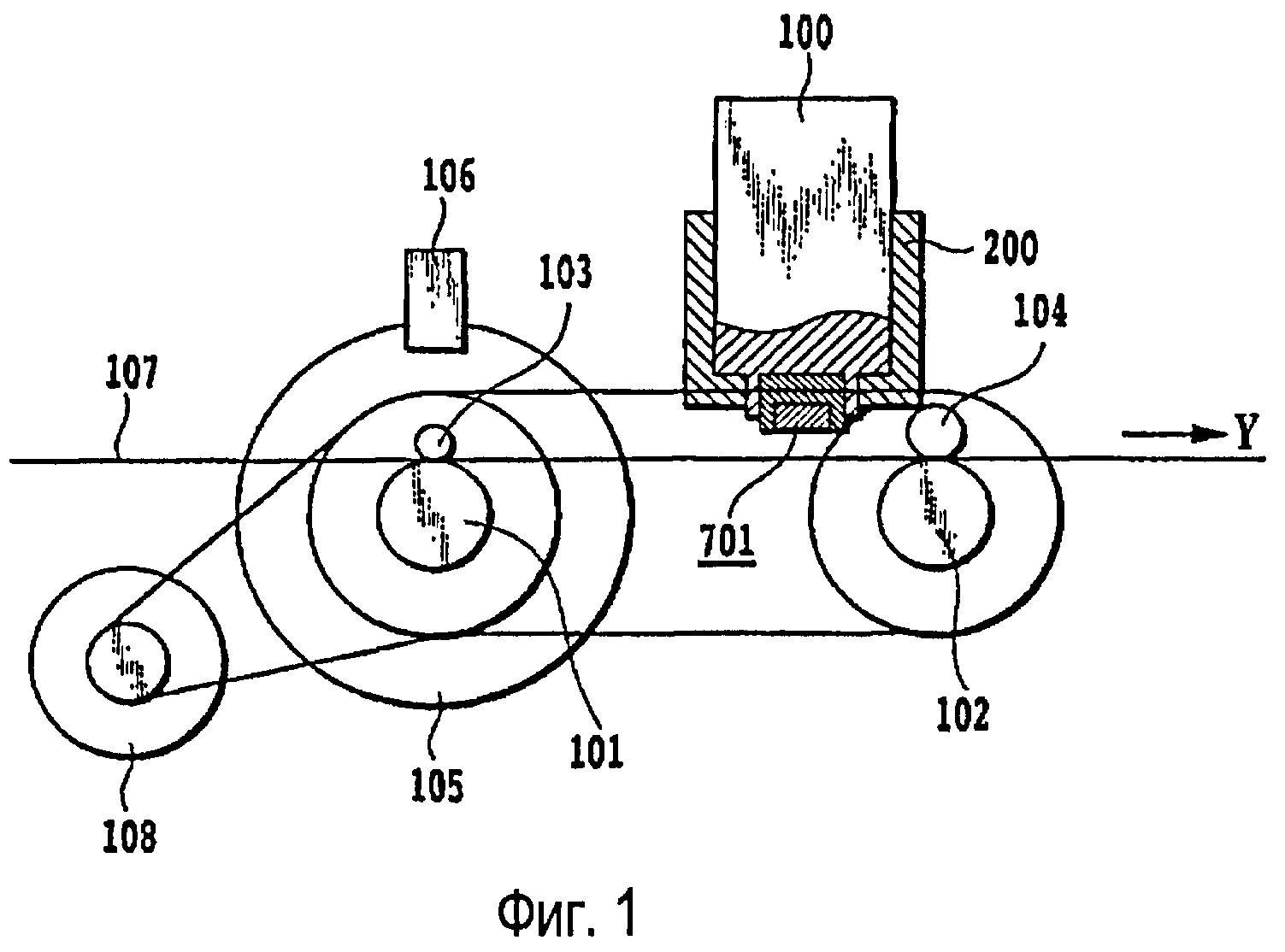
Фиг.1 показывает устройство, раскрытое в патенте США № 7104710. Раскрытое в патенте США № 7104710 устройство обладает двумя средствами измерения - средством для измерения реальной поворотной величины протяжного ролика, который перемещает печатный носитель, и средством для измерения реального расстояния, пройденного печатным носителем.
На фиг.1 печатный носитель 107 удерживается между протяжными роликами 101, 102 и противостоящими двумя прижимными роликами 103, 104 и перемещается с помощью вращения протяжных роликов 101, 102 в направлении Y. Сила вращения протяжных роликов 101, 102 создается приводным валом перемещающего двигателя 108, связанного с двумя протяжными роликами. Кодирующий диск 105 закрепляется на той же поворотной оси, что и протяжный ролик 101.
Датчик 106 угла поворота, установленный в положение, где проходит периферическая часть кодирующего диска 105, может измерять поворотную величину кодирующего диска 105. Из поворотной величины кодирующего диска 105, то есть поворотной величины протяжного ролика 101, может определяться расстояние, пройденное печатным носителем 107.
Однако отмечается, что угол поворота протяжного ролика не обязательно совпадает с фактическим расстоянием, на которое перемещался печатный носитель. Эксцентриситет протяжного ролика может возникать во время его установки, и проскальзывание между протяжным роликом и печатным носителем неизбежно вызывает некоторые сдвиги или отклонения между расстоянием, пройденным печатным носителем, и углом поворота протяжного ролика. Чтобы избежать этой проблемы, патент США № 7104710 раскрывает конструкцию, которая в дополнение к датчику 106 угла поворота имеет оптический датчик 701, который измеряет фактическое расстояние, пройденное печатным носителем 107, и выполняет управление перемещением печатного носителя на основе информации о перемещении от двух датчиков.
В показанном примере оптический датчик 701 монтируется на каретку 200 вместе с картриджем 100 головки и располагается между двумя протяжными роликами 101, 102. Оптический датчик 701 фиксирует состояния поверхности перемещаемого печатного носителя в виде графической информации во множестве моментов. Из множества частей собранной таким образом графической информации блок управления печатающего устройства вычисляет расстояние, пройденное печатным носителем, и скорость перемещения печатного носителя. Как описано выше, предоставление средства для непосредственного обнаружения расстояния и скорости перемещения печатного носителя и приведение в действие средства перемещения согласно полученной информации позволяют более точно управлять печатаемым положением изображения на печатном носителе.
Однако отмечается, что даже если предоставляется средство для непосредственного обнаружения расстояния перемещения у печатного носителя, как в патенте США № 5149980 и патенте США № 7104710, скорость перемещения не может обнаруживаться в моменты, в которых печатный носитель находится вне обнаруживаемого диапазона оптического датчика, например на начальном или конечном этапе операции перемещения.
Возьмем, к примеру, случай, где используется оптический датчик 701, как показано на фиг.1. На начальном этапе операции перемещения, пока печатный носитель 107 проходит под оптическим датчиком 701, пройденное печатным носителем 107 расстояние не может быть измерено. В результате, когда печатается передняя часть печатного носителя, информация от оптического датчика 701 не может отражаться на приведении в действие перемещающего двигателя 108, вызывая возможность того, что печатаемое положение передней части печатного носителя не может точно контролироваться.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение реализовано для решения вышеупомянутой проблемы, и его цель - предоставить печатающее устройство и способ управления перемещением носителя, оба допускающие обнаружение с высокой точностью расстояния, на которое переместился печатный носитель, и точное управление перемещением печатного носителя.
Первый объект настоящего изобретения - печатающее устройство для печати изображения на печатном носителе, содержащее: ленту, допускающую удерживание на ней печатного носителя; приводной механизм, сконфигурированный для перемещения ленты при печати; измерительный модуль, сконфигурированный для обнаружения расстояния или скорости движения печатного носителя, удерживаемого на ленте, причем измерительный модуль допускает съемку как изображения поверхности ленты, так и изображения поверхности печатного носителя, удерживаемого на ленте, и измерительный модуль получает расстояние или скорость движения с помощью обработки изображений; и блок управления, сконфигурированный для управления приводным механизмом на основе результата обнаружения у измерительного модуля.
Второй объект настоящего изобретения - способ управления перемещением объекта, помещенного на движущуюся ленту, причем способ управления перемещением объекта, помещенного на движущуюся ленту, содержит: первый этап для движения ленты, на которой размещается объект; второй этап для обнаружения расстояния или скорости движения объекта путем съемки последовательно изображения поверхности объекта, помещенного на ленту, и изображения поверхности ленты; и третий этап для управления перемещением ленты на первом этапе на основе расстояния или скорости движения, полученных с помощью второго этапа.
Вышеуказанные и другие цели, результаты, признаки и преимущества настоящего изобретения станут более очевидными из нижеследующего описания его вариантов осуществления, рассматриваемого в сочетании с прилагаемыми чертежами.
Дополнительные признаки настоящего изобретения станут очевидными из нижеследующего описания типовых вариантов осуществления (со ссылкой на приложенные чертежи).
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - принципиальная схема, показывающая способ измерения расстояния, пройденного печатным носителем, который раскрыт в патенте США № 7104710.
Фиг.2 - вид сверху, показывающий конструкцию основной части струйного печатающего устройства, применимого к этому изобретению.
Фиг.3 - вид в поперечном сечении, показывающий подробности печатающего устройства и перемещающей системы струйного печатающего устройства, применимые к этому изобретению.
Фиг.4 - принципиальная схема, показывающая кодирующий диск и датчик угла поворота, как они устанавливаются.
Фиг.5 - схематичный вид в перспективе, показывающий часть строения печатающей головки.
Фиг.6 - принципиальная схема, показывающая эскизную конструкцию оптического датчика.
Фиг.7 - диаграммы, показывающие способ определения расстояния и скорости перемещения печатного носителя из графической информации, полученной оптическим датчиком в два разных момента T1 и T2.
Фиг.8 - принципиальная схема, показывающая, как размещается сопоставленная область окна для графической информации.
Фиг.9 - блок-схема, показывающая управляющую конфигурацию в струйном печатающем устройстве, применяемую к одному варианту осуществления этого изобретения.
Фиг.10 - блок-схема алгоритма, показывающая последовательность этапов, выполняемых ЦП в управлении перемещением печатного носителя в первом варианте осуществления.
Фиг.11 показывает состояние печатного носителя, перемещаемого на каждом этапе блок-схемы алгоритма из фиг.10.
Фиг.12 - блок-схема алгоритма, показывающая последовательность этапов, выполняемых ЦП в управлении перемещением печатного носителя во втором варианте осуществления.
Фиг.13 - график, показывающий идеальную скорость перемещения ленты (печатного носителя) относительно времени, когда выполнена одна операция перемещения с помощью перемещающего двигателя; и
фиг.14 показывает способ исправления, используемый, когда скорость перемещения ленты не оказывается идеальной в одной операции перемещения.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
(Первый вариант осуществления)
Фиг.2 - вид сверху основной части струйного печатающего устройства, применимого к этому изобретению. Фиг.3 - вид в поперечном сечении, показывающий подробности печатающего устройства и перемещающей системы в струйном печатающем устройстве.
Перед тем как выполняется операция печати, печатный носитель 8, например обыкновенная бумага и пластиковый тонкий лист, размещается на автоматическом устройстве 32 подачи бумаги. Когда начинается операция печати, приводится в действие двигатель 35 подачи бумаги для управления подбирающим роликом 31 через зубчатые колеса. Когда вращается подбирающий ролик 31, печатный носитель 8 забирается и разделяется, по одному листу за раз, из автоматического устройства 32 подачи бумаги и подается во внутреннюю часть печатающего устройства. В то же время датчик 33 бумаги обнаруживает наличие или отсутствие печатного носителя 8, чтобы определить, нормально ли выполняется подача бумаги. Поданный таким образом печатный носитель 8 размещается на ленте 15 и переносится в направлении Y с заранее установленной скоростью.
Как показано на фиг.3, лента 15 удерживается вокруг протяжного ролика 9 и копировального ролика 10, чтобы она находилась в контакте с их внешними окружностями. Копировальный ролик 10 поджимается в нисходящем направлении (к левой части чертежа) не показанным пружинным элементом, чтобы поддерживать постоянное натяжение ленты 15. Вращающая сила перемещающего двигателя 14 передается через зубчатые колеса протяжному ролику 9, чье вращательное движение передается ленте, заставляя ленту 15 и копировальный ролик 10 вращаться в показанных направлениях. Печатный носитель 8, который подавался в положение протяжного ролика 9, переносится в направлении Y с помощью вращения ленты 15.
Протяжный ролик 9 монтируется с кодирующим диском 13 так, чтобы их оси вращения были одинаковыми. Датчик 18 угла поворота размещается для обнаружения положения при повороте кодирующего диска 13.
Фиг.4 - принципиальная схема, которая показывает кодирующий диск 13 и датчик 18 угла поворота, как они устанавливаются. Кодирующий диск 13 имеет прорези 201, вырезанные с равными интервалами на его периферической части, и датчик 18 угла поворота устанавливается в положение, где проходят прорези 201. Датчик 18 угла поворота принадлежит к оптическому типу передачи и обнаруживает движущиеся прорези 201, и формирует импульсный сигнал, когда он их обнаруживает. Этот импульсный сигнал позволяет обнаруживать поворотную величину кодирующего диска 13. Из интервала времени, с которым формируется импульсный сигнал, могут вычисляться положение и скорость перемещения печатного носителя. То есть этот вариант осуществления имеет средство для обнаружения величины прохода протяжного ролика, например кодирующий диск 13 и датчик 18 угла поворота, и на основе информации, полученной от средства обнаружения величины прохода, косвенно вычисляет расстояние и скорость перемещения печатного носителя.
Обратимся снова к фиг.2 и фиг.3. В положении ленты 15, которое обращено к картриджу 1 головки, располагается пластина 17, сделанная из плоской плиты, для поддержки ленты 15 изнутри. До и после области печати картриджа 1 головки предоставляются прижимной ролик 12 и зубчатый ролик 11, чтобы удерживать перемещаемым печатный носитель 8. Область печати перемещаемого печатного носителя 8 сохраняется плоской с помощью пластины 17, поддерживающей его снизу, и прижимного ролика 12 и зубчатого ролика 11, прижимающих его сверху.
Каретка 2 поддерживается и направляется на круглой направляющей 3, установленной в печатающем устройстве, и допускается к перемещению взаимно в направлении X, в котором продолжается круглая направляющая 3. Движущая сила каретки 2 создается, когда приводная сила двигателя 4 каретки передается шкиву 5 двигателя, ведомому шкиву 6 и зубчатому ремню 7. Каретка 2 снабжается датчиком 30 исходного положения. То, что каретка 2 находится в исходном положении, может обнаруживаться, когда датчик 30 исходного положения перемещается за защитную пластину 36, установленную в исходном положении.
Картридж 1 головки, смонтированный на каретке 2, имеет печатающую головку 26 для выбрасывания чернил и чернильный контейнер, который подает чернила в печатающую головку 26. Печатающая головка 26 выбрасывает чернила по заранее установленному хронометражу согласно сигналу изображения на печатный носитель 8, перемещаемый под ней, когда она движется в направлении X вместе с кареткой 2.
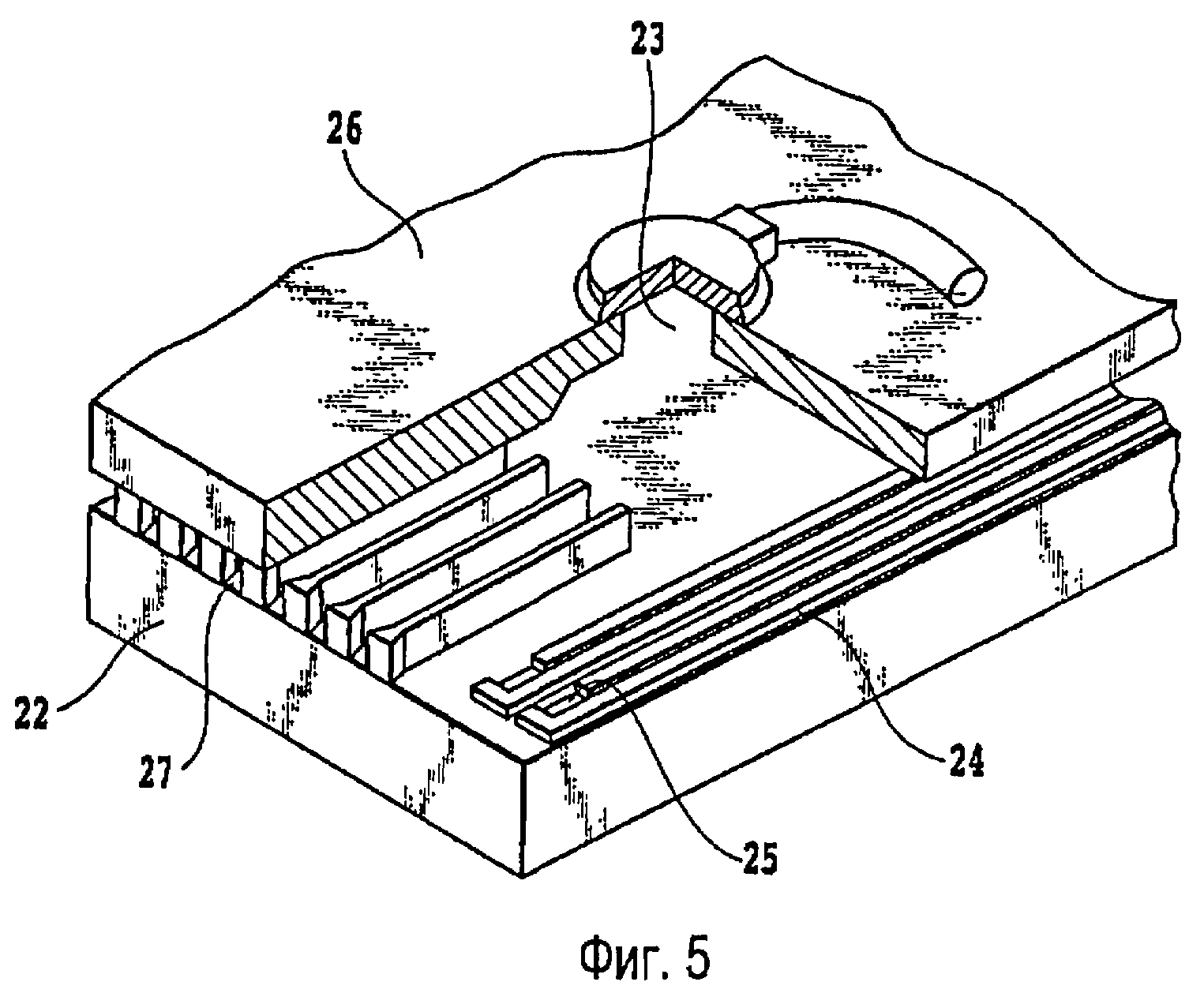
Фиг.5 - схематичный вид в перспективе, показывающий часть строения печатающей головки 26. Печатающая головка 26, используемая в этом варианте осуществления, имеет множество электротермических преобразующих элементов для формирования тепловой энергии и выбрасывает чернила с помощью сформированной тепловой энергии. На чертеже поверхность 22 отверстий выброса в печатающей головке 26, которая обращена к печатному носителю 8 с заранее установленным промежутком между ними, образуется с помощью множества отверстий 27 выброса с заранее установленным шагом. Чернила, поступившие из чернильницы, временно размещаются в общей камере 23 и затем проводятся с помощью капиллярного притяжения во множество чернильных каналов 24, сообщающихся с отдельными отверстиями 27 выброса. На участке внутри каждого из чернильных каналов 24, который ближе к отверстию 27 выброса, устанавливается электротермический преобразующий элемент 25 для формирования тепловой энергии. К электротермическому преобразующему элементу 25 прикладывают заранее установленный импульс на основе сигнала изображения для формирования тепла, которое вызывает пленочное кипение в чернилах в чернильных каналах 24. Давление расширяющегося пузырька выталкивает заранее установленный объем чернил в виде капли из отверстий 27 выброса.
Печатающее устройство, используемое в этом варианте осуществления, является струйным печатающим устройством серийного типа, которое имеет отверстия 27 выброса, упорядоченные в направлении, пересекающем направление X, в котором двигается каретка 2. То есть проход печати, который выбрасывает чернила из отверстий 27 выброса при движении каретки 2, и операция перемещения, которая перемещает печатный носитель на заранее установленное расстояние в направлении Y путем вращения ленты 15, поочередно повторяются для постепенного создания изображения на печатном носителе 8.
Вернемся снова к фиг.2 и фиг.3. В этом варианте осуществления оптический датчик 16 для непосредственного обнаружения расстояния перемещения печатного носителя 8 устанавливается до печатающей головки 26 на каретке 2 (предшествуя области печати) в направлении перемещения (направлении Y).
Фиг.6 - принципиальная схема, показывающая эскизную конструкцию оптического датчика 16. Оптический датчик 16 имеет светоизлучающий элемент 41 и фотодетектор 42. Фотодетектор 42 получает свет, излученный из светоизлучающего элемента 41 и отраженный печатным носителем 8, через объектив 43. Фотодетектор 42 является устройством ввода изображений, например CCD-устройством и CMOS-устройством. Устройство ввода изображений может использовать линейный датчик, имеющий оптоэлектронные преобразователи, размещенные одномерно, или зональный датчик, имеющий эти преобразователи, размещенные двумерно. Область захвата изображения у оптического датчика 15 (устройства ввода изображения) находится на поверхности ленты у ленты 15, где проходит печатный носитель 8 на ленте, по меньшей мере, при печати. Графическая информация, собранная фотодетектором 42, отправляется аппаратным средствам 44, где она подвергается заранее установленной обработке перед передачей контроллеру печатающего устройства.
Собранная графическая информация здесь - это информация из отраженного света, которая описывает частичное состояние поверхности печатного носителя 8 и ленты 15. Например, информация может быть тенью, созданной геометрией поверхности печатного носителя 8 и ленты 15, или шаблоном, заранее напечатанным на их поверхностях. Она также может быть пятнистой структурой, созданной воздействием отраженного света от источника когерентного излучения.
Фиг.7 показывает способ определения расстояния перемещения и/или скорости перемещения у печатного носителя 8 с помощью обработки изображения. В обработке изображений используется графическая информация, полученная от оптического датчика 16 в двух разных моментах T1 и T2. Обозначенная номером 501, является первой графической информацией, полученной оптическим датчиком 16, обнаруживающим поверхность в области захвата изображения у печатного носителя, перемещаемого во время T1. Как только получена первая графическая информация, контроллер в печатающем устройстве накладывает сопоставленную область 601 окна заранее установленного размера на графическую информацию 501.
Фиг.8 - принципиальная схема, показывающая то, как сопоставленная область 601 окна размещается на графической информации 501. В этом варианте осуществления сопоставленная область 601 окна имеет область 5×5 пикселей и размещается на первой графической информации 501, чтобы характерный шаблон (крестовой шаблон), напечатанный на печатном носителе 8, попал в центр окна. Затем контроллер извлекает только графическую информацию, включенную в сопоставленную область 601 окна, и сохраняет ее в качестве сопоставленного шаблона 602 внутри окна.
Обращаясь снова к фиг.7, обозначенная номером 502 является второй графической информацией, полученной оптическим датчиком 16, обнаруживающим поверхность в области захвата изображения у печатного носителя, перемещаемого во время T2, отличное от T1. Контроллер последовательно двигает сопоставленную область окна на второй графической информации для обнаружения положения, где она совпадает с сопоставленным шаблоном 602 внутри окна, который уже сохранен. Затем на основе расстояния L между положением сопоставленного шаблона 602 внутри окна в первой графической информации 501 и положением сопоставленного шаблона 602 внутри окна во второй графической информации 502 определяется расстояние, на которое печатный носитель 8 переместился между временем T1 и временем T2, учитывая оптическое увеличение объектива 43. Из временной разницы между T1 и T2 также может вычисляться скорость перемещения печатного носителя 8.
В вышеприведенном примере для простоты объяснения измерение расстояния, пройденного печатным носителем, описано как выполняемое путем сверки с крестовым шаблоном, напечатанным на печатном носителе. Однако обращаясь снова к фиг.2, оптический датчик 16 в этом варианте осуществления располагается до каретки 2 в направлении перемещения и находится почти в центральной части в направлении основного сканирования. Поэтому не может быть получена информация на печатном носителе после печати. В этом варианте осуществления оптический датчик 16 обнаруживает состояние поверхности чистого печатного носителя 8 или ленты 15. Точнее говоря, когда печатный носитель 8 прошел через датчик 33 бумаги и находится в диапазоне, в котором он может быть обнаружен оптическим датчиком 16, обнаруживается состояние поверхности печатного носителя 8. Когда печатный носитель 8 находится вне обнаруживаемого диапазона, обнаруживается состояние поверхности ленты 15. В любом случае, путем преобразования в двоичную форму сигнала, который получил оптический датчик 16, и преобразования его в шаблон может определяться расстояние и скорость перемещения печатного носителя 8 и ленты 15 посредством способа, описываемого со ссылкой на фиг.7 и фиг.8. В способе, который измеряет расстояние перемещения с использованием датчика 18 угла поворота, расстояние перемещения определяется в момент, когда обнаруживается прорезь. С помощью способа с использованием оптического датчика 16 фактическое расстояние и скорость перемещения могут быть получены для каждой единицы времени.
В этом варианте осуществления, хотя оптический датчик 16 используется для измерения расстояния перемещения печатного носителя согласно этапам, объясненным на фиг.7 и фиг.8, также возможно использовать полезность обнаружения у оптического датчика 16, чтобы принять решение о наличии или отсутствии печатного носителя.
Фиг.9 - блок-схема, показывающая управляющую конфигурацию в струйном печатающем устройстве, которая применена к этому варианту осуществления. На чертеже контроллер 100 является основным блоком управления в печатающем устройстве и имеет, например, ЦП 101 в виде микрокомпьютера, ПЗУ 103, хранящее программы, ассоциированные таблицы и другие неизменные данные, и ОЗУ 105, содержащее области, в которых надо создавать данные изображения, а также рабочие области.
Главное устройство 110 является подключенным внешне устройством, которое функционирует в качестве источника изображений для печатающего устройства. Устройство 110 может быть компьютером, который формирует или обрабатывает данные, например изображения, которые нужно напечатать, или считывающим модулем, который считывает изображения. Данные изображения и другие команды, поступающие от главного устройства 110, и сигналы о состоянии могут передаваться к контроллеру 100 и от него через интерфейс (I/F) 112.
Функциональный модуль 120 имеет группу переключателей для приема входных команд от оператора, включая выключатель питания 122 и восстановительный переключатель 126, для начала операции восстановления на основе всасывания.
Датчик 130 имеет группу датчиков для обнаружения состояния печатающего устройства. Этот вариант осуществления имеет температурный датчик 134 для обнаружения температуры окружающей среды, в дополнение к описанным выше датчику 30 исходного положения, датчику 33 бумаги и оптическому датчику 16 и датчику 18 угла поворота для обнаружения расстояния перемещения.
Номером 140 обозначен привод головки, который приводит в действие электротермические преобразующие элементы 25 печатающей головки 26 в соответствии с данными печати. Привод 140 головки имеет сдвиговый регистр для выравнивания данных печати с тем, чтобы совпадать с ассоциированными электротермическими преобразующими элементами 25, и схему-защелку, которая фиксирует данные в подходящий момент. Привод 140 головки также включает в себя логическое схемное устройство, которое запускает электротермические преобразующие элементы 25 одновременно с тактовым сигналом привода и модулем регулировки момента, который надлежащим образом устанавливает момент выброса для регулирования положений точек на печатном носителе.
Рядом с печатающей головкой 26 устанавливается нагреватель 142 для регулирования температуры печатающей головки 26, чтобы стабилизировать характеристику выброса чернил. Нагреватель 142 может быть создан на подложке печатающей головки 26, как электротермические преобразующие элементы 25, или прикреплен к корпусу печатающей головки 26 или картриджу 1 головки.
Номером 150 обозначен привод двигателя для приведения в действие двигателя 4 каретки, номером 160 - привод двигателя для приведения в действие двигателя 35 подачи бумаги, и номером 170 - привод двигателя для управления перемещающего двигателя 14.
Фиг.10 - блок-схема алгоритма, показывающая последовательность этапов, которую ЦП 101 выполняет в управлении перемещением печатного носителя в этом варианте осуществления. Фиг.11 показывает состояния печатного носителя, перемещаемого на разных этапах блок-схемы алгоритма. В этом варианте осуществления выполняется "печать без полей", которая образует изображение на всей области печатного носителя от переднего края до заднего края.
Когда операция печати начинается по команде начала печати от главного устройства 110, ЦП 101 запускает двигатель 35 подачи бумаги для подачи одного листа печатного носителя 8 из автоматического устройства 32 подачи бумаги (этап 1, состояние 1). На следующем этапе 2 ЦП 101 проверяет, обнаружил ли датчик 33 бумаги передний край печатного носителя 8. Если обнаруживается, что обнаружен передний край печатного носителя 8, то ЦП 101 переходит к этапу 3. Если обнаруживается, что передний край печатного носителя еще не обнаружен на этапе 2, то ЦП 101 возвращается к этапу 1, где он продолжает операцию подачи бумаги. Пока не обнаруживается передний край печатного носителя, этап 1 и этап 2 повторяются. Состояние 2 из фиг.11 показывает, что передний край печатного носителя 8 как раз достиг положения, где он может быть обнаружен датчиком 33 бумаги.
На этапе 3 ЦП 101 начинает приводить в действие перемещающий двигатель 14 и одновременно начинает обнаружение с помощью датчика 18 угла поворота поворотной величины кодирующего диска 13. В результате печатный носитель 8 размещается на ленте 15, и выполняется управление перемещением печатного носителя в направлении Y на основе информации от датчика 18 угла поворота. Точнее говоря, ЦП 101 определяет величину и скорость вращения протяжного ролика 9 от момента, в котором датчик 18 угла поворота обнаруживает прорезь, вырезанную в кодирующем диске 13. Эти измеренные значения возвращаются управлению перемещением, которое управляет перемещающим двигателем 14.
На следующем этапе 4 ЦП 101 проверяет, обнаружил ли оптический датчик 16 печатный носитель 8. Если он решает, что печатный носитель 8 обнаружен, то ЦП 101 переходит к этапу 5. Если это не так, то ЦП 101 возвращается на этап 3 и повторяет этап 3 и этап 4, пока оптический датчик 16 не обнаружит печатный носитель 8. Состояние 3 из фиг.11 изображает состояние перемещения в момент, в котором передний край печатного носителя 8 достиг области, обнаруживаемой оптическим датчиком 16.
На этапе 5 ЦП 101 начинает измерение расстояния перемещения, используя оптический датчик 16. Однако отмечается, что в этот момент ЦП 101 не выполняет управление перемещением на основе информации от оптического датчика 16, но управляет перемещающим двигателем 14 путем возвращения только информации от датчика 18 угла поворота. ЦП 101 сохраняет информацию о расстоянии перемещения от датчика 18 угла поворота и информацию о расстоянии перемещения от оптического датчика 16, полученные в один и тот же момент.
На этапе 6 ЦП 101 проверяет, находится ли разница между информацией о перемещении от датчика 18 угла поворота и информацией о перемещении от оптического датчика 16 в допустимом диапазоне. Если разница находится в допустимом диапазоне, то ЦП 101 переходит к этапу 7. Если это не так, то ЦП переходит к этапу 10.
На этапе 7 ЦП 101 переключает информацию для управления перемещением печатного носителя с информации о перемещении от датчика 18 угла поворота на информацию о перемещении от оптического датчика 16 и начинает операцию печати в соответствии с данными изображения. То есть на основе информации о перемещении, полученной от оптического датчика 16, ЦП 101 определяет расстояние и скорость перемещения печатного носителя 8 и возвращает эти фактически измеренные значения управлению перемещением в перемещающем двигателе 14, когда тот выполняет операцию печати с использованием печатающей головки 26. В этом варианте осуществления, в связи с "печатью без полей", которая печатает изображение до краев печатного носителя 8, операция печати на печатном носителе 8 с помощью печатающей головки 26 начинается в положении состояния 4 на фиг.11 с последующим состоянием 5 и завершается в положении состояния 6. В состоянии 4 оптический датчик 16 обнаруживает расстояние перемещения печатного носителя 8. Однако в состоянии 5 задний край печатного носителя 8 выходит из обнаруживаемого диапазона оптического датчика 16. Поэтому в этом варианте осуществления то, что оптический датчик 16 обнаруживает между состоянием 5 и состоянием 6, является не печатным носителем 8, а лентой 15. Как описано выше, если обнаруживаемый объект изменяется в середине операции обнаружения, измерение расстояния перемещения с помощью оптического датчика 16 может выполняться без прерывания, пока печатный носитель 8 перемещается на ленте 15, как в этом варианте осуществления.
На этапе 8 ЦП 101 проверяет, завершена ли печать всех данных изображения на печатном носителе 8. Если он решает, что печать всех данных изображения завершена, то ЦП переходит к этапу 9, где он непрерывно перемещает печатный носитель с помощью управления перемещением, используя датчик 18 угла поворота. Затем на этапе 12 он выполняет операцию выгрузки бумаги перед выходом из этой обработки. Если на этапе 8 он решает, что печать данных изображения на печатном носителе 8 еще не завершена, то ЦП 101 возвращается к этапу 7, где он выполняет управление перемещением на основе информации от оптического датчика 16, одновременно продолжая операцию печати.
На этапе 6, если принимается решение, что разница между информацией о перемещении от датчика 18 угла поворота и информация о перемещении от оптического датчика 16 больше допустимого уровня, то ЦП 101 начинает операцию печати, в то же время оставаясь в управлении перемещением на основе информации от датчика 18 угла поворота (этап 10). Когда разница между двумя порциями информации о перемещении больше допустимого уровня, преимущество отдается информации от датчика 18 угла поворота. Причина в том, что в зависимости от вида используемого печатного носителя обнаружение расстояния перемещения на основе оптического датчика 16 может быть сложно выполнить, и надежность полученной информации о расстоянии перемещения может ухудшаться. Напротив, когда используется датчик 18 угла поворота, хотя и не измеряется фактическое расстояние, пройденное печатным носителем, известно, что информация от датчика 18 угла поворота не так сильно отличается от фактического пройденного расстояния. Это означает, что надежность этой полученной информации является высокой.
На этапе 11 ЦП 101 проверяет, завершена ли печать всех данных на печатном носителе 8. Если принимается решение, что напечатаны все данные изображения, то ЦП переходит к этапу 12, где он выполняет операцию выгрузки бумаги перед выходом из этой обработки. Если этап 11 решает, что печать всех данных изображения на печатном носителе 8 еще не завершена, то ЦП возвращается к этапу 10, где он выполняет управление перемещением на основе информации от датчика 18 угла поворота, одновременно продолжая операцию печати.
С помощью этого варианта осуществления, описанного выше, если обнаруживаемый объект меняется с печатного носителя на ленту в середине операции обнаружения, то измерение расстояния перемещения с помощью того же способа обнаружения с использованием того же оптического датчика может выполняться без прерывания. Поэтому можно обнаружить расстояние перемещения печатного носителя с высокой надежностью во всем процессе перемещения печатного носителя, когда он печатается, и с использованием обнаруженной информации выполнить управление перемещением с высокой точностью.
(Второй вариант осуществления)
В этом варианте осуществления также используются печатающее устройство и печатающая головка, аналогичные таковым из первого варианта осуществления. Однако отмечается, что печатающее устройство в этом варианте осуществления не включает в себя конструкцию для измерения поворотной величины протяжного ролика 9, то есть кодирующий диск 13 и датчик 18 угла поворота.
В первом варианте осуществления печатающее устройство и способ управления перемещением описаны как имеющие датчик 18 угла поворота в дополнение к оптическому датчику 16, чтобы рассмотреть ситуацию, где ухудшается надежность информации о расстоянии перемещения от оптического датчика 16. Однако предоставление датчика 18 угла поворота или предоставление иного средства, чем оптический датчик 16, для обнаружения расстояния перемещения печатного носителя не является неотъемлемым в этом изобретении. Если оптический датчик 16 может обнаружить почти точно расстояние перемещения большей части печатного носителя, который печатающее устройство спроектировано принимать, управление перемещением может выполняться с использованием только информации о перемещении от оптического датчика 16 во всем процессе перемещения печатного носителя.
Фиг.12 - блок-схема алгоритма, показывающая последовательность этапов, которую ЦП 101 выполняет в управлении перемещением печатного носителя в этом варианте осуществления. Будут объясняться отличительные части этого варианта осуществления, отличные от блок-схемы алгоритма на фиг.9.
На этапе 22, когда датчик 33 бумаги обнаруживает печатный носитель 8, ЦП 101 переходит к этапу 23, где он начинает приводить в действие перемещающий двигатель 35 под управлением перемещением, используя оптический датчик 16. В этот момент времени, поскольку передний край печатного носителя 8 не достиг обнаруживаемой области оптического датчика 16, объект, который обнаруживает оптический датчик 16, является лентой 15.
На этапе 24, когда оптический датчик 16 обнаруживает печатный носитель 8, ЦП 101 переходит к этапу 25, где он начинает операцию печати под управлением перемещением, используя оптический датчик 16. Когда оптический датчик 16 обнаруживает печатный носитель 8, обнаруживаемый оптическим датчиком 16, объект переключается с ленты 15 на печатный носитель 8. Затем операция печати по этапу 25 повторяется, пока этап 26 не решит, что все данные изображения полностью напечатаны на печатном носителе 8.
Когда этап 26 подтверждает, что печать всех данных изображения завершена, ЦП 101 переходит к этапу 27, где он перемещает печатный носитель 8 под управлением перемещением с использованием оптического датчика 16. На этапе 28 напечатанный материал выпускается. Теперь обработка завершается.
С помощью этого варианта осуществления, описанного выше, предоставление только одного средства измерения расстояния перемещения (оптического датчика) позволяет обнаруживать расстояние перемещения печатного носителя с высокой надежностью во всем процессе перемещения печатного носителя, когда он печатается, и с использованием обнаруженной информации выполнить управление перемещением с высокой точностью.
(Третий вариант осуществления)
В этом варианте осуществления также используются печатающее устройство и печатающая головка, аналогичные таковым из первого варианта осуществления. Однако этот вариант осуществления выполняет основное управление перемещением, используя информацию о расстоянии перемещения от датчика 18 угла поворота, и вносит поправку в управление перемещением в соответствии с информацией о расстоянии перемещения от оптического датчика 16.
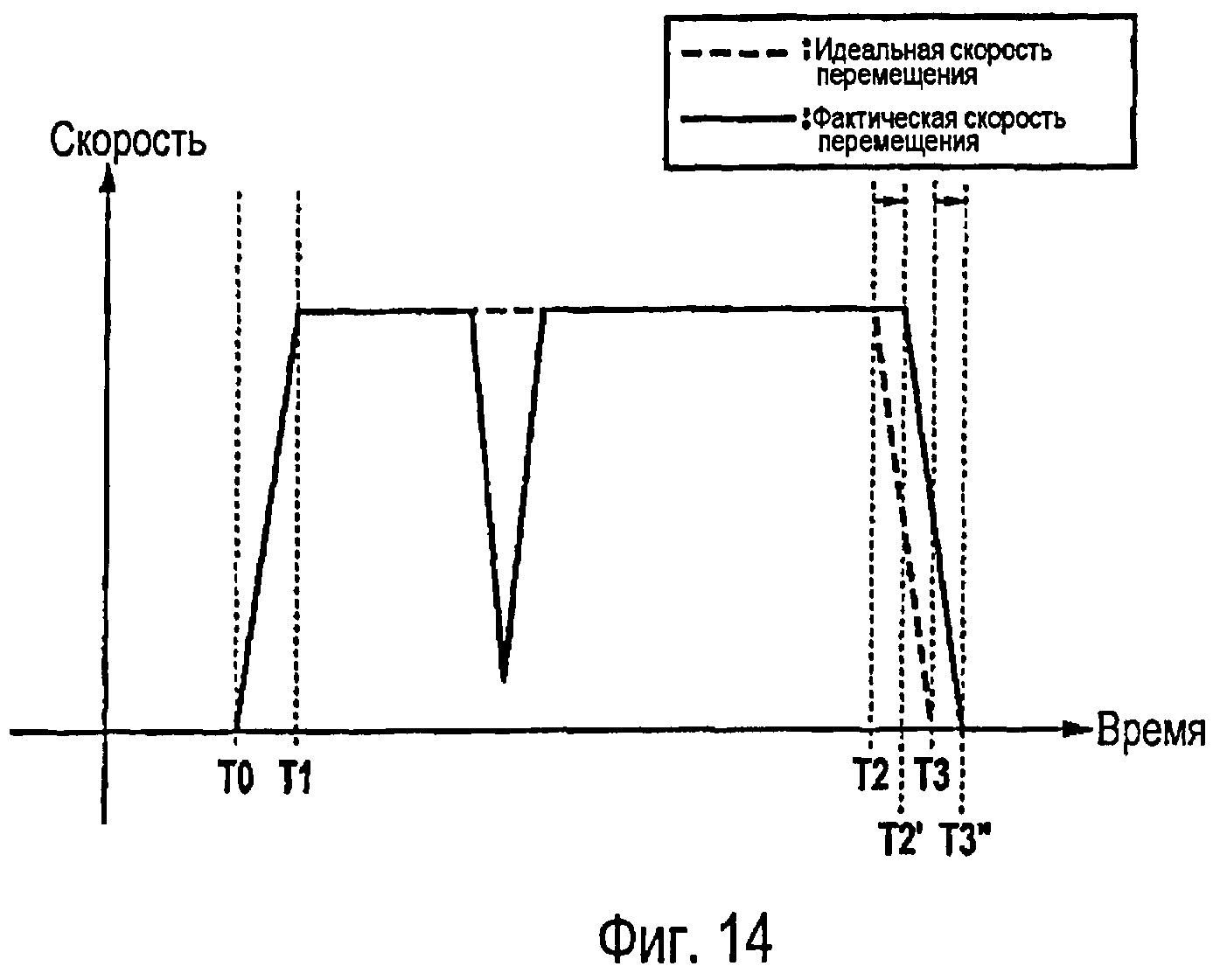
Фиг.13 показывает идеальную скорость перемещения ленты 15 (печатный носитель 8) относительно времени, когда перемещающим двигателем 14 выполняется одна операция перемещения. На чертеже регулирование по ускорению выполняется от T0 до T1, поддержание постоянной скорости выполняется от T1 до T2 и регулирование замедления выполняется от T2 до T3. Однако когда некоторые внешние силы прикладываются к перемещающей системе, перемещение ленты 15 может отклоняться от операции перемещающего двигателя 14.
Фиг.14 показывает способ исправления, используемый, когда скорость перемещения ленты 15 не оказывается идеальным состоянием в одной операции перемещения. В поддержании постоянной скорости между T1 и T2, когда скорость печатного носителя временно снижается, как показано на чертеже, выполнение обычного регулирования замедления, которое указывается пунктирной линией, то есть регулирование постоянного замедления между T2 и T3, может сделать расстояние перемещения печатного носителя 8 меньше целевого. Поэтому в этом варианте осуществления на основе информации о расстоянии перемещения от оптического датчика 16 момент T2, в котором поддержание постоянной скорости меняется на регулирование замедления, настраивается для каждой операции перемещения. Фиг.14 показывает пример, в котором T2 исправляется на T2'. Как описано выше, в результате откладывания момента, в котором нужно переключаться с поддержания постоянной скорости на регулирование замедления, момент, в котором скорость перемещения печатного носителя равна 0, исправляется с T3 на T3'. В результате расстояние перемещения печатного носителя 8 может быть приближено к целевому значению.
Несмотря на то что целевое расстояние перемещения описано здесь как реализуемое с помощью исправления момента T2, в котором нужно переключаться с поддержания постоянной скорости на регулирование замедления, параметр, который нужно исправить для корректирования расстояния перемещения, не ограничивается T2. Например, целевое расстояние перемещения может достигаться путем оставления момента T2 как есть, в котором нужно переключаться с поддержания постоянной скорости на регулирование замедления, и сдерживания степени замедления (наклон от T2 к T3).
В вышеприведенном варианте осуществления оптический датчик 16 описан для установки до каретки 2. Однако в этом изобретении отсутствует конкретное ограничение на положение установки оптического датчика 16. Единственное требование - чтобы область обнаружения оптического датчика 16 была областью, которую проходит печатный носитель, и была областью до или после печатного носителя, где имеется лента, которая поднимает и переносит печатный носитель.
В этом варианте осуществления оптический датчик должен уметь обнаруживать поверхности как печатного носителя, так и ленты. Поэтому внутри печатающего устройства может устанавливаться зарядный механизм для формирования статического электричества между печатным носителем и перемещаемой лентой для притягивания их друг к другу или разрядный механизм для снятия статического электричества. Чтобы оградить перемещающую систему, отличную от ленты, например подбирающие ролики, от вмешательства в операцию ленты по перемещению печатного носителя, может предоставляться механизм для выведения подбирающих роликов из контакта с печатным носителем немедленно после подачи печатного носителя.
Дополнительно поверхность ленты может снабжаться узором или мелкими шероховатостями, чтобы обнаруженное оптическим датчиком изображение легко показывало его характерные свойства.
Для сравнения характеристики изображения, обнаруженного оптическим датчиком, может использоваться фигурное изображение, например показанное на фиг.7 или фиг.8. Однако это изобретение не ограничивается этими шаблонами. Например, информация об отраженном свете от оптического датчика может быть преобразована по Фурье, и информация, полученная в разные моменты, может сравниваться на совпадение на каждой частоте. Также можно получить расстояние перемещения только части, соответствующей максимуму.
Хотя описано струйное печатающее устройство серийного типа, это изобретение не ограничивается вышеупомянутыми конструкциями. Печатающая головка может быть отличной от струйного типа. Результат этого изобретения также может быть полностью реализован, если печатающее устройство является печатающим устройством полной строки, в котором отверстия выброса упорядочены в направлении X на длину, соответствующую ширине печатного носителя, и в котором печатный носитель непрерывно перемещается для печати изображений.
Хотя вышеприведенное объяснение для примера использует печатающее устройство, которое печатает на широко применяемом печатном носителе, у этого изобретения нет ограничения на используемый печатный носитель. Это изобретение может эффективно применяться к любым объектам, таким как кожа, ткань, керамика и пластмасса, на чью поверхность могут наноситься чернила для формирования на ней изображения.
В любой конструкции результат этого изобретения может быть полностью реализован при условии, что печатающее устройство имеет объект в качестве печатного носителя, ленту для перемещения печатного носителя, соприкасающуюся с ним, и измерительный модуль для обнаружения расстояний перемещения как печатного носителя, так и ленты.
Хотя настоящее изобретение описано со ссылкой на типовые варианты осуществления, нужно понимать, что изобретение не ограничивается раскрытыми типовыми вариантами осуществления. Объем нижеследующей формулы изобретения должен соответствовать самой широкой интерпретации, чтобы заключать в себе все такие модификации и равноценные конструкции и функции.
Реферат
Изобретение относится к печатающему устройству, которое печатает изображение на объекте, и способу управления перемещением объекта. Печатающее устройство для печати изображения на печатном носителе содержит ленту, обеспечивающую удерживание на ней печатного носителя, приводной механизм, сконфигурированный для перемещения ленты при печати, измерительный модуль для обнаружения расстояния или скорости движения печатного носителя, выполненный с возможностью получения изображения поверхности ленты и печатного носителя, и блок управления приводным механизмом. Способ управления перемещением объекта, помещенного на движущуюся ленту, содержит первый этап перемещения ленты, второй этап обнаружения расстояния или скорости движения объекта и третий этап управления перемещением ленты на первом этапе на основе полученных данных с помощью второго этапа. Изобретение обеспечивает обнаружение с высокой точностью расстояния, на которое перемещается печатный носитель, и точное управление его перемещением. 2 н. и 10 з.п. ф-лы, 14 ил.
Формула
ленту, обеспечивающую удерживание на ней печатного носителя;
приводной механизм, сконфигурированный для перемещения ленты при печати;
измерительный модуль, выполненный с возможностью для обнаружения расстояния или скорости движения печатного носителя, удерживаемого на упомянутой ленте, причем упомянутый измерительный модуль выполнен с возможностью получения изображения поверхности ленты и изображения поверхности печатного носителя, удерживаемого на ленте, и при этом измерительный модуль определяет расстояние или скорость движения с помощью обработки изображений; и
блок управления, выполненный с возможностью управления приводным механизмом на основе результата обнаружения, полученного измерительным модулем.
датчик, выполненный с возможностью получения расстояния или скорости движения печатного носителя путем измерения величины прохода приводного механизма;
при этом блок управления управляет приводным механизмом на основе результатов обнаружения, полученного измерительным модулем и упомянутым датчиком.
при этом в соответствии с тем, находится ли разница на допустимом уровне, блок управления управляет приводным механизмом на основе результата обнаружения, полученного измерительным модулем, либо управляет приводным механизмом на основе результата обнаружения, полученного упомянутым датчиком.
при этом упомянутый датчик обнаруживает поворотную величину протяжного ролика для получения расстояния движения или скорости движения печатного носителя.
при этом измерительный модуль получает расстояние движения или скорость движения печатного носителя с помощью нескольких обнаружений в разные моменты.
первый этап перемещения ленты, на которой размещается объект;
второй этап обнаружения расстояния или скорости движения объекта путем получения последовательно изображения поверхности объекта, помещенного на ленту, и изображения поверхности ленты; и
и третий этап управления перемещением ленты на упомянутом первом этапе на основе расстояния или скорости движения, полученных с помощью упомянутого второго этапа.
Комментарии