Для пояснения следует указать, что привод постоянной скорости каретки
2 обеспечивает продольное пвремещение около 2,5 мм за период мени, необходимый для выборки одного
знака, находящегося на расстоянии 5 знаков от мест печати. Отсюда
следует, что если два последовательно печатаемых знака удалены друг от
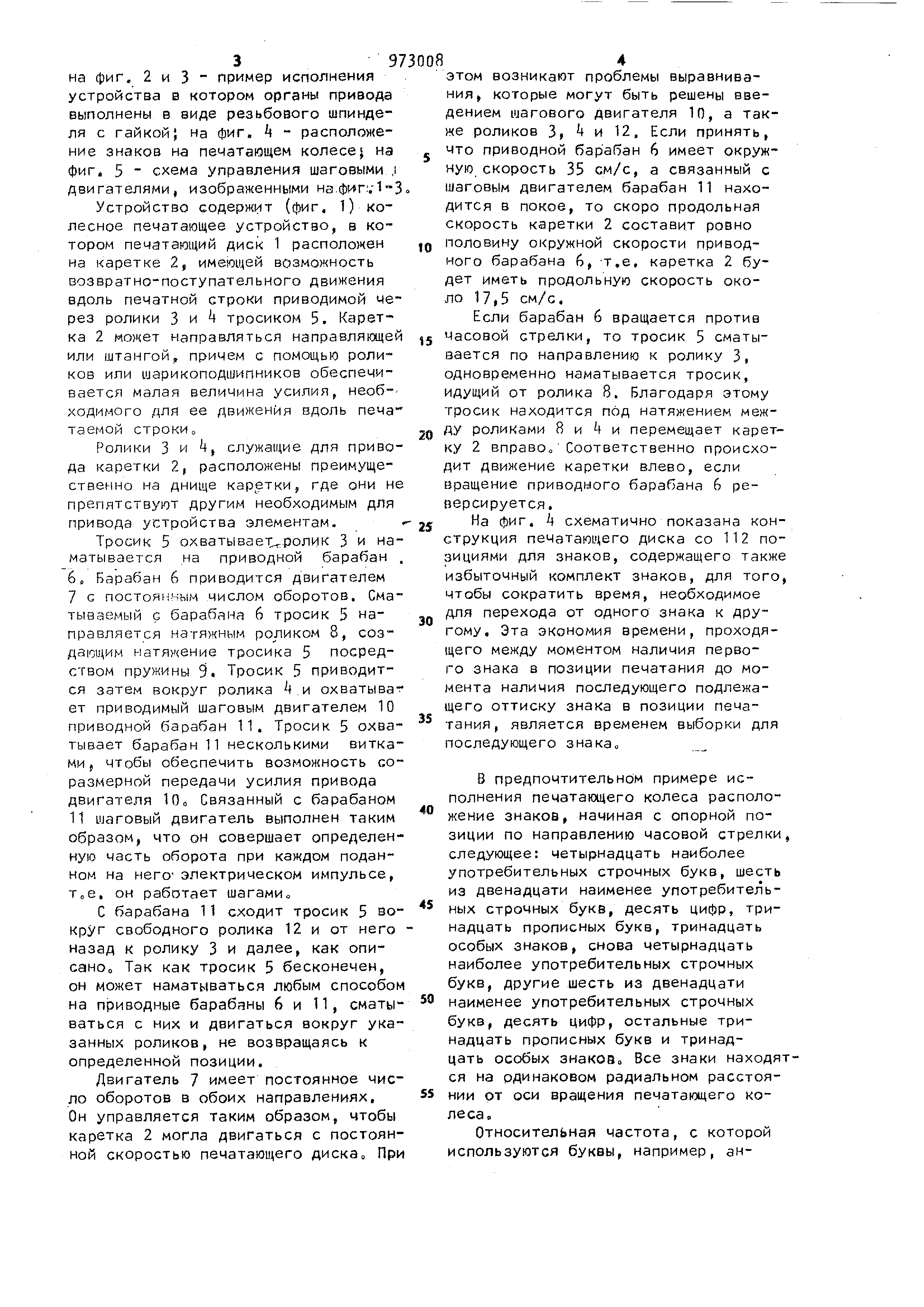
рекции в зависимости от расстоянии между знаками на печатающем колесе.
Т а б л и {ц а 2 ДРУга на печатающем колесе точно на Ц5 знаков, второй знак достигает
места печати как раз тогда, когда каретка подойдет к месту печати, еели
только имеется привод с постоянным числом оборотов, В табл, 2 приведены величины корПри
рассмотрении табл., 2 становит ся очевиднымJ что если не требуется
коррекции для знаков, удаленных друг от друга на 45 шагов, то для каждого шага, отклоняющегося от эти
номинальных 5 шагов, необходима коррекция в р,05б мм. Поэтому для примера в табя„ 2 указаны расстояния
между знаками от 0 до 70 шагов с интервалом через 5 шагов и от 70 до 150 шага - с интервалом 10 шагов.
Величина коррекции указывает расстояние , на которое должен смещаться
знак от позиции, которая достигалась бы благодаря подаче от двигателя 7.
В случае десятичного давления 0,273м для 40 шагов означают, что каретка
2 должна сместиться дополнительно на 0,279 мм от позиции, которую она при
мет, когда 0-й знак подойдет к месту печати (позиция 12 шагов), чтобы
следующий знак был правильно установлен через оттиск В качестве другого примера следует рассмотреть случай, в котором деа
последовательно печатаемых знака отстоят друг от друга на печатающем колесе
на 80 шагов, что делает необходимым обратное смещение (отрицательное
смещение) на 1,95б мм, чтобы компенсировать излишнее перемещение, обусловленное
приводным барабаном 6 в процессе того, как печатающее колесо подойдет после оттиска 0 знака к
80 знаку. Это корректирующее смещение накладывается на привод через барабан
6 посредством шагового двигателя 10„ Шаговые двигатели могут быть покупными„ Они выполняют за каждый
шаг поворотное движение на определенный постоянный угол. Благодаря
соответствующему выбору размеров барабана Л и шагового двигателя, угол
поворота которого соответствует известной желаемой величине, возможно
придать определенное число шагов двигателя компенсационному смещению
для отклонения знаков от номинальных 5 расстояний о Если, например, при
заданном диаметре барабана требуется чтобы шаговый двигатель имел возможность
выполнять шаг 3 на каждое отклонение знака от номинальных 5 рас стояний, и если принять, что два печатаемых
знака отстоят друг от друга на 80 расстояний, то необходима коррекция на 35 из 80 расстояний,
и поэтому к MjaroaoMy двигателю нужно подвести 35 импульсов, которые он
превращает в компенсирующее смещение на 1,956 мм в обратном направлении Благодаря этому происходит точная
выправка последующего печатаемого зн ка относительно позиции для печатания , когда знак достигает позиции
печатания (опорная .позиция). Соответствующее рассмотрение дает величины Компенсации для всех осталь
ных расстояний знаков То же самое относится также к двенадцатеричному
разделению (табл, 2), В приведенных положениях необходимо, однако, еще
принять во внимание, что между оттиском первого знака и предъявлением
для оттиска второго знака должен про . йти минимальный промежуток времени,
чтобы могла правильно сработать механическая часть устройства„ Если,
например, принять, что при двух знаках удаленных друг от друга на печатающем
колесе меньше, чем на ЦО расстояний , не имеется достаточного вре мени, чтобы можно было вернуть нажим
ной молоточек в положение покоя, то возникает необходимость выполнять
временное расстояние между двумя последовательными знаками не таким коротким
, как возможно, если не принимать- во внимание наличие определен ных механических частей Динамические
свойства нажимного молоточка и других механических деталей печатающего устройства могут в зависимости
от конструкции устройства требовать больше или меньше времени, чем то, которое соответствует 4о расстоя
ниям между знаками. Требуемое для механических частей время может быть
определено экспериментально для каж дого печатающего устройства„ При этом может быть составлена таблица,
аналогичная табл 2. Если каждому знаку придать индивидуальную величину шага, то посредством коррекции
возможно выполнять соответствующее изменение расстояния между положениями
печати для пропорционального шагового перемещения. Если два последовательно печатаемых
знака отстоят друг от друга на 40 шагов, к шаговому двигателю 10 подводилось бы столько импульсов,
чтобы барабан 11 выполнил поворот на 15° по Часовой стрелке, Зто было
бы достигнуто пятью импульсами заданной полярности и произошло бы в-течение
времени, за которое барабан 6 вращается с постоянным числом оборотов
против часовой стрелки и транспортирует каретку 2 на расстояние 2,261 мм. Эта подача кареток на
2,261 мм благодаря вращению барабана 6 составляет вместе с 0,279 мм
подачи благодаря вращению соединенного с шаговым двигателем 10 барабана
11 общую подачу каретки, равную 2,5 мм, между двумя знаками, что
при десятичном делении точно соответствует желаемому,расстоянию между
двумя соседними печатаемыми знаками. Аналогичное положение может осуществляться
также для другого разделения , только должны соответственно выбираться механические размеры
приводных барабанов 6 и 11, а также шаг шагового двигателя 1Q, чтобы получить
желаемое линейное перемещение при известном постоянном числе оборотов приводного двигателя 7.
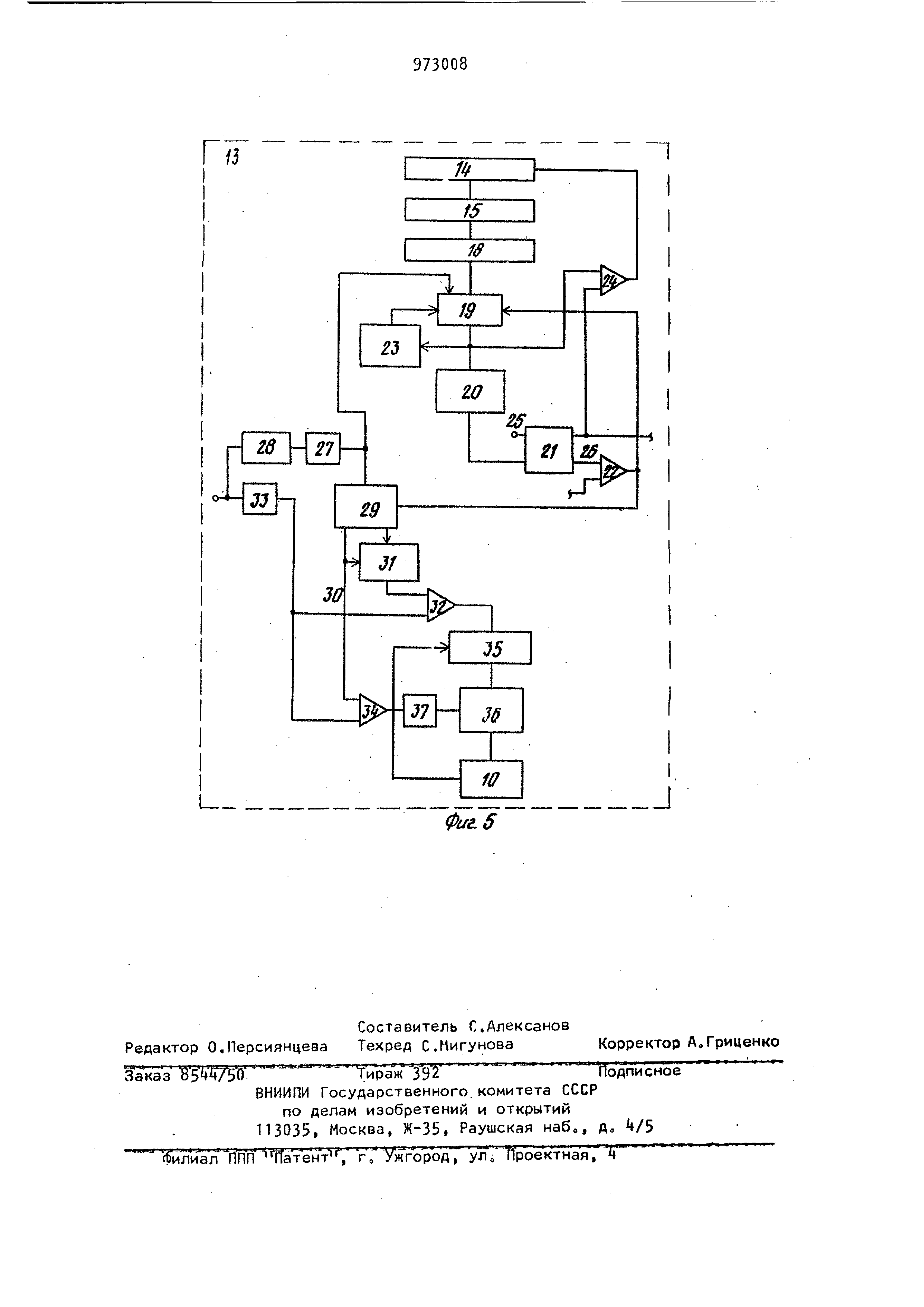
На фиг. 1 шаговый двигатель. 10 соединен с блоком управления 13 сообщающим при поворотном включении
шагового двигателя необходимые импульсы соответствующей полярности. Блок
управления 13 может быть построен для этих целейо . На фиг о 5 детально показан блок
управления 13 двигателем. В блоке управления 13 имеется регистр 1, в
котором запоминается положение на- , печатанного последнего знака, т,е,-,
положение печатающего диска 1, Выход регистра 14 соединен с суммирующим
элементом 15, в котором производится суммирование с предшествующей позициейо
Эта величина соответствует 40 расстояниям между знаками, которые
произвольно принимаются как минимальное время возврата для магнита 16 и нажимного молоточка 17.
Этот новый адрес (позиция последнего знака плюс tO) затем передается в вычитающий элемент 18, когда
превышен полученный от суммирующего элемента 15 (что соответствует
Числу .знаков иа печатающем диске 1 Новый адрес от суммирующего элемента 15 или вычитающего элемента
задается в счетчик 19 Счетчик 19 переключается тактовым импульсом и другими условиями, которые будут об
яснены ниже. Содержимое счетчика по дается при переключении в накопител
постоянных величин 20 j, чтобы найти знак,, приданный текущему адресу. Знак, приданный вызванному адресу
подводится затем к узлу сравнения 2 Устройство также имеет логическу схему И 22, счетчик 23, логическую
схему И 2, В.ЧОД 25 узла сравнения 21j соединенный через линию 26 со (зходом лоп-шеской схемы И 22, Уст
ройство имеет триггер 27 соединенный с замедлителем 28 и счетчиком 29s который через линию 30 подключе
к логической схеме ИЛИ 31 . Устройство включает в себя логическую схе
му И 325 триггер 33, связанный с ло гическими схемами И 32 и 3, вычита
ющий счетчик 35 подключенный через узел Зб контроля к узлу 37 блокиров ки и двигателю И),
На фиГо 2 и 3 показан шпиндель 38, на котором посажена гайка 35, вра1дайщаяся в боковой стенке корпуса
40, Гайка 39 соединена ступицей k G зубчатым колесом k2, 8 корпусе i)0 также расположена
с возможностью вращения шестерня О приводимая шаговым двигателем Устройство работает следующим об
разом. Последовательно появляющиеся на печатающем диске 1 знаки из накопителя
20 вводятся через клавиатуру (не показана) и подводятся к входу 25 узла 21 сравнения.
Результатом сравнения будет либо согласование, либо рассогласование. При наиболее место встречающемся
рассогласовании дается соответствующий сигнал через линию 26 к схеме И 22, к которой, кроме того, подвол
дится тактовый импульс При одновременном появлении этих сигналов схема И 22 дает соответствую1ций так
товому импульсу выходной сигнал на счетчик 19, переключает последний на один шаг и определяет этим новый
адрес для запроса накопителя постоянных величии 20,. В то время как выходящие из счетчика 19 адреса
переключаются, они одновремен812 но идут через цепь обратной связи
а счетчик 23, когда адрес достиг значения 112. Кроме того, переключаемыи адрес также подводится к схеме
И . ЕСЛИ узел 21 сравнения устанаЕ ливает рассогласование, схема И 22 дает
выходной сигнал также на счетчик 29, Счетчик 29 устроен таким образом, что он включается при минус пяти,
считает до нуля и. затем переключается иа один шаг. Счетчик 29 может также
автоматически устанавливаться замедленным сигналом включения на минус пять, причем этот сигнал включения
, проходящий через триггер 27 может быть отведен от импульса, воздействущего на нажимной молоточек
17. Он подводится через замедлитель 28 к триггеру 27, чтобы возбудить
счетчик 29о Выходной сигнал триггера 27 служит одновременно для переноса
содержимого вычитающего элемента 18 в счетчик 19, чтобы начать переработку следующего знака. Счетчик
29 имеет линию 30, управляющую схемой ИЛИ 31, когда в линии 30 име
ется двоичная единица„ Если содержимое счетчика29 растет, проходит
нуль и становится положительным, сигнал идет 8 линию 30. Если имеется
сигнал в линии 30, схема ИЛИ 31 работает как инвертор, если сигнал отсутствует
, что имеет место при положительном содержании счетчика 29, схема ИЛИ 31 проводит со.держимое
счетчика 29 без изменения в схему И 32, Стартовый сигнал достигает
через триггер 33 схемы И 32 благодаря тому, то он соединяется с вы
ходным сигналом схемы ИЛИ 3 и вызывает накопление или выходного сигнала
схемы ИЛИ 31, или содержимого счетчика 29 в сметчике 35. Последний ведет обратный счет при получении
сигналов обратной связи от шагового двигателя 10„ Эти сигналы обратной
связи поступают тогда, когда шаговый двигатель может переключаться.
Счетчик 35 подает при каждом процессе счета выходной сигнал к узлу контроля 36 двигателем
Возникагодий в линии 30 сигнал соединяется с выходным сигналом триггера
33 в схеме И З. Выходной сигнал схемы И 3 подается в узел блокировки 37, заломинавдий наличие сигнала
в линии 30 и тем самым сигнализирующий в.узел 36 направление вращения шагового двигателя. Выходной сигнал узла 36 непосредственно подводится в шаговый двигатель 10 и вызывает
в нем нужное число шагов поворота в желаемом направлении о Если узел 21 сравнения устанавливает
согласование печатаемого знака со считываемым из накопителя постоян
ных величин 20 знаком, он дает соответствующий сигнал в схему И 2. Последняя обуславливает возврат находя
щегося в счетчике 19 адреса к накоплению в регистр 1Л. Таким образом возможно переводить регистр k после
определения расстояния между последним знаком и следующим печатаемым зн
ком в текущее положение, причем может учитываться необходимость того, чтобы между знаками располагались
по крайней мере 40 позиций. Если уровень счетчика 19 превышает величину 112, необходимо его вернуть
на 1 , так как обычные счетчики могут считать до 128-или выше и поэтому мог бы получиться неправильный
адрес Это производится, как упо миналось, счетчиком 23, который приводится в действие только тогда, ког
да счетчик 19 достигает уровня 112. Триггер 27 дает сигнал нагрузки, обу
славливающий загрузку содержимого вы читающего элемента 18 в счетчик 19,
если схема установила согласование. В тот же момент времени счетчик 19
получает все импульсы переключения, подведенные к нему от схемы И 22, и переносит свое содержимое через
схему И 32 в счетчик 35. Счетчик 29 теперь пустой и может возвратиться
на минус пять, что достигается тем же сигналом, который загружает вычит
ющий элемент 18, Переключение содержимого счетчика 29 через схему И 32
производится вследствие оттиска пред шествующего знака и готовит счетчик
35к необходимой коррекции для следую1 .цего знака Благодаря этому также
подготавливается узел 21 сравнения, определяюьций следующий знак, так,
чтобы его представительство имелось в счетчике 29, когда происходит оттиск знака, необходимая коррекция
которого накоплена в счетчике 35. Для простоты принято, что узел 36контроля двигателя подает .за каждый
шаг счета счетчика 35 один импульс . В случае, если нет необходимости в точном положении знаков можно
далее повысить скорость печатаю9 щего устройства. Например, может быть
достаточным, пяти шагам печатающего диска 1 был придан только один
шаг шагового двигателя Ш, в этом случае счетчик 35 должен выполнять пять
шагов счета и только затем давать выходной импульс в узел Зб. Из этого следует, что параметры этой схемы
могут быть приспособлены к желаемой форме исполнения о Из указанного следует
, что каретка 2 путем наложения выполняемых двигателем шагов может ко времени оттиска устанавливаться
также в иные положения, чем при непосредственном приводе от двигателя 7
с постоянным числом оборотов и приводного барабана 6. Другое исполнение, ведущее к тому
же результату, однако позволяющее исключить тросик 5| а также ролики
3 и 4, возможно при использовании приводного шпинделя. Установленный
в боковых стенках корпуса приводной шпиндель может триводиться вращающимся
с постоянным числом оборотов двигателем. На фиГа 2 и 3 изображен
приводимый в одном направлении шпиндель 38, на который посажена гайка
39. Благодаря тому, что гайка 39 зафиксирована от вращения, она смещается
в продольном направлении шпинделя 38. Так как гайка 39 расположена с возможностью вращения в боковой
стенке корпуса 40, последний может смещаться с гайкой 39 вдоль шпинделя
38, Гайка 39 соединена ступицей tl с зубчатым колесом 42, Ступица 1 расположена в боковой стенке
0 корпуса с возможностью поворота и служит для передачи силы от гайки
39 к корпусу 0, чтобы обусловить движение каретки. В корпусе 0 далее расположена с
возможностью вращения шестерня 3, приводимая шаговым двигателем ЦЦ, Шестерня 3 входит в зацепление с
зубчатым колесом 42 и приводит поэтому через последнюю соединенную с гайкой
39 ступицу 41. Благодаря этому возникает отнТ сительное смещение между корпусом 4П и шпинделем ЗВ.
При одновременном вращении шпинделя 38 и га11ки 39 возникает состоящее
из двух компонентов сложное движение , аналогичное тому, которое было описано на фиг,, 1 .
Подсчет Числа шагов шаговсэго двигателя 10 и диаметра барабана 11
соответствует определению шагов waгового двигателя Ц и повороту гайки
39 согласно фиг. 2 и Зо Боковое смещение корпуса tO за каждый шаг шагового двигателя 4 происходит простым
образом благодаря выбору и варьированию диаметра делительной окружности зубчатых колес 2 и 43, а
также угла подъема винтовой линии шпинделя 38. При этом шаг транспортирования корпуса 0 .за шаг шагового
двигателя выбираются свободно, ес ли зубчатые колеса k2 и 3 выполнены соответственно.
Описанная схема коррекционного смещения может быть также при способлена к стартстопной работе,
благодаря чему становится возмож ным снижение времени транспортиров вания каретки5 В стартстопной системе
время,, требуемое для оттиска знаKSj является наибольшим из времен: времени, необходимого для обращения
к последущему знаку на печатающем колесе, или времени перемещения каретки от одной позиции печатания к
последующей и для остановки каретки. С помощью двух приводных двигателей
делающих возможным наложенное одно на другое перемещение, можно существенно сократить время, требуемое
для перемещения каретки из одного .положения печатания в другое. Если
это имеет место, то время, необходимое для оттиска любого знака, равно времени выборки следуьэщего знака
на печатающем колесе. Также возможно выполнять при стар стопной работе более грубые установки
, если печатающий диск застопорен, и нажимной молоточек приводится в
действие в момент времени, когда каретка прошла желаемое положение печатания
. Текущая позиция каретки может быть при этом проконтролирована Все коррекции, выполняемые в устройстве
путем воздействия на шаговый 9 16
двигатель, заканчиваются прежде, чем каретка подойдет к месту печатания .
Использование предлагаемого изобретения позволяет повысить производительность печатных работ.
Формула изобретения Пишущая машина со средством для управления кареткой, содержащая механическую
каретку с установленным на ней печатающим диском, электродвигатель , подключенный к блоку -управления
с тактовым генератором, отличающаяся тем, что, с целью повышения производительности,
она имеет ролики, установленные на каретке, шкивы и подпружиненный трос,
кинематически связанныйс роликами, а блок управления имеет узел сравнения
, узел пуска, счетчик, узел блокировки и логические схемы И, при
этом шкивы установлены на валу электродвигателя и через подпружиненный
трос кинематически связаны с роликами , выходы узла пуска соединены с
входом узла сравнения ,входом .счетчика , первыми входами первых логических
схем И, вторые входы которых подключены к управляющим выходам счетчика, выходы первых логических
схем И непосредственно и через узел блокировки связаны с входами электродвигателя
, управляющий выход счетчика соединен с управляющим узла сравнения и выходом второй
логической схемы И, первый вход которой соединен с выходом тактового
генератора, а второй вход - с информационным выходом узла сравнения. Источники информации,
принятые во внимание при экспертизе 1 . Патент США № 37П7214, кло 197-53, 1972о
Фиг.1
Фиг.Э 1Ъосо6ыа $HQMOi }3у/ано$ /fo&ПиМ6/Л 6 ил 12 HOuffe/fee y/jomfleSt/fne f ff6/} ( SHOffo
cmp0t/ffMX ify/fS ffy /fatf ffjree c/7 joffv//i)/x
Ik Haudofffe ynompeSuе бмш 3//a/(off cmjoov ti/x
бнаипенее t/rjornpeSt/rek f/btx 3/feiffoS Cf7U OVf/6/X
фл f33//a a ffJ }ff/7t/Cff6/X S OffOff







Комментарии