Способ и устройство компенсации колебаний вращающихся деталей - RU2248479C2
Код документа: RU2248479C2
Чертежи


Описание
Изобретение относится к способу, а также к устройству согласно ограничительной части пунктов 1,2 и 27 формулы изобретения.
Из международной заявки WO 97/03832 известен способ и устройство для снижения изгибных колебаний вращающихся систем.
Патент США 5921150 показывает устройство для снижения изгибных колебаний вращающихся деталей посредством расположенного во вращающейся детали рабочего органа, который имеет действующую в аксиальном направлении вращающейся детали силовую компоненту.
Задачей изобретения является снижение изгибных колебаний вращающихся деталей машин.
Эта задача решается признаками по пунктам 1, 2 и 27 формулы изобретения.
Получаемые изобретением преимущества заключаются в том, что изгибные колебания снижаются. Особым преимуществом является снижение мешающих воздействий так называемых "канальных ударов" в цилиндрах в ротационных печатных машинах.
На чертежах представлены конкретные примеры выполнения изобретения, которые показывают:
Фиг.1 - вид спереди на цилиндр ротационной печатной машины в положении покоя.
Фиг.2 - вид спереди аналогично фиг.1 в состоянии эксплуатации.
Фиг.3 - поперечное сечение по линии III-III через цилиндр по фиг.1 в увеличенном изображении.
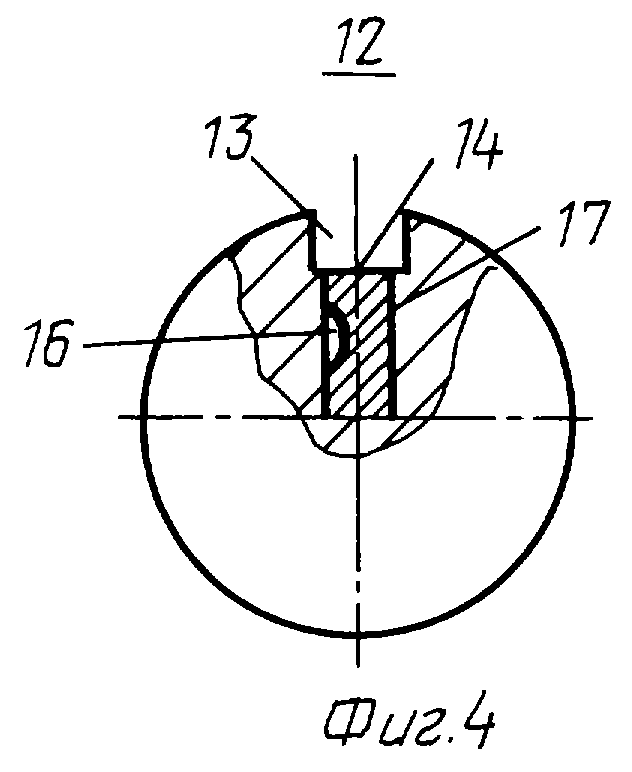
Фиг.4 - поперечное сечение через цилиндр ротационной печатной машины в еще одном примере выполнения.
Вращающаяся деталь, например цилиндр, такой, как формный цилиндр, передаточный цилиндр, печатный цилиндр, раскатный красочный цилиндр, растирочный цилиндр или ведущий валик (далее называемый цилиндром 01) на обоих концах имеет непоказанные цапфы. На окружности 04 цилиндра 01 и приблизительно посередине длины I предусмотрен кольцевой паз 06, который принимает несколько, например двенадцать, рабочих органов 20 до 31. Рабочие органы 20 до 31 расположены внутри окружной линии цилиндра 01.
Может быть предусмотрено несколько, например три или пять, расположенных в аксиальном направлении на расстоянии кольцевых пазов 06 с рабочими органами 20 до 31 на цилиндре 01. В аксиальном направлении означает то, что это направление оси вращения 07 цилиндра 01.
Каждый кольцевой паз 06 может заполняться в направлении боковой поверхности цилиндра 01, например, твердеющей пластмассой.
Рабочие органы 20 до 31 могут состоять, например, из пьезоэлементов или двухслойных элементов. Далее каждый рабочий орган может состоять из узла цилиндр-поршень, который может приводиться пневматически или гидравлически.
Преимущество дает такое выполнение, при котором рабочий орган имеет слоистые пьезонити с медными пленочными анодами. Такой рабочий орган увеличивает свою длину при наложении напряжения.
На боковой поверхности цилиндра 01 могут быть размещены чувствительные элементы, например, принимающие нажимное пьезокерамическое усилие элементы. Это может быть размещено под офсетным резиновым полотном или под печатной формой цилиндра 01. Как рабочие органы 20 до 31, так и чувствительные элементы могут быть связаны с регулятором. Регулятор может быть расположен внутри или снаружи цилиндра 01.
Имеется также возможность использовать каждый рабочий орган 20 до 31 одновременно в качестве чувствительного элемента.
Передача энергии и/или передача информации между регулятором и чувствительным элементом, а также между регулятором и рабочим органом осуществляется предпочтительно бесконтактно.
Цилиндр 01 имеет находящийся в осепараллельном направлении, а также вблизи окружности 04 цилиндра канал 09. Этот канал 09 представляет собой известное техническое средство для фиксации и/или зажима концов печатной формы или резинового полотна цилиндра 01 или валка. В цилиндре 01 может быть также предусмотрено компенсационное отверстие 11 для приема средств для устранения дисбаланса.
Устройство функционирует следующим образом. Чувствительные элементы или же рабочие органы определяют актуальные значения прогиба цилиндра 01 во время эксплуатации на определенном месте окружности 04 в один и/или несколько моментов времени. Эти значения подаются регулятору, который нагружает соответствующие рабочие органы 20 до 31 определенным значением. Эти рабочие органы 20 до 31 изменяют свои величины в аксиальном или почти аксиальном направлении цилиндра. Почти аксиальное направление означает то, что оно имеет по меньшей мере аксиальную компоненту. Таким образом цилиндр 01 в одном или нескольких местах в определенный момент времени расширяется, соответственно удлиняется или укорачивается, что воздействует на прогиб цилиндра 01.
Силовая компонента, соответственно величина рабочего органа 20 до 31 в аксиальном направлении, изменяется в зависимости от положения угла поворота цилиндра 01.
Согласно другой форме выполнения изобретения (фиг.4) вращающаяся деталь, например цилиндр 12 или валик для ротационной печатной машины, может иметь проходящий в осепараллельном направлении канал 13, который на своей донной поверхности 14, например, может иметь глухое отверстие 16 для приема рабочего органа 17. Этот рабочий орган 17 может быть расположен посередине длины цилиндра 12 и может быть выполнен как так называемый “адаптроник”. Естественно, имеется возможность предусматривания нескольких расположенных на расстоянии друг от друга в аксиальном направлении цилиндра 12 рабочих органов 17 под боковой поверхностью цилиндра.
Имеется также возможность снабжать рабочие органы 20 до 31 предварительным напряжением, независимо от того, идет ли речь при этом о приводимом электрически или пневматически рабочем органе. В этом случае каждый рабочий орган 20 до 31 уже в состоянии покоя цилиндра 01 имеет среднее линейное расширение а (фиг.1).
Во время работы цилиндра 01 по фиг.2 значение d прогиба цилиндра 01 достигается за счет того, что рабочий орган 20 нагружается более высоким напряжением, чем до этого, т.е. увеличивается, и рабочий орган 26 нагружается меньшим напряжением, чем напряжение до этого, так что он уменьшается. Вследствие этого рабочий орган 20 получает большую длину d и рабочий орган 26 получает меньшую длину с, причем b>а>с.
Лежащие по окружности 04 между рабочим органом 20 и рабочим органом 26 рабочие органы 21 до 25 и 31 до 27 могут нагружаться в соответствии с их угловым положением различными напряжениями, так что вследствие этого в определенный момент времени по окружности 04 цилиндра имеются различные линейные расширения.
При этом находящиеся почти в первой половине окружности 04 рабочие органы 24 до 28, а также 30, 31 увеличивают значение их имеющегося до сих пор линейного расширения а на новое значение b, соответственно на значение между а и b.
Находящиеся почти во второй половине окружности 04 рабочие органы 24 до 28 уменьшают значение а их линейного расширения на новое значение с, соответственно на значение между а и с.
Так как цилиндр 01 вращается, длины рабочих органов 20 до 31 также изменяются в соответствии с углом вращения.
Вследствие этого посредством по меньшей мере одного рабочего органа 17 или 20 цилиндров 01 или 12 компенсируются идущие от печатной машины колебания, причем производится частичное изменение длины цилиндра 01 или 12 параллельно его оси вращения 07. Этим оказывают воздействие на прогиб цилиндра.
Рабочими органами 17 или 20 снижается таким образом амплитуда изгибных колебаний и/или частота изгибных колебаний. Изгибные колебания могут оказывать влияние на другие виды колебаний, в частности на колебания кручения.
Ссылочные позиции
01 вращающаяся деталь, цилиндр
02
03
04 окружности (01) окружная линия
05
06 кольцевой паз
07 ось вращения
08 управляющий провод
09 канал
10
11 компенсационное отверстие (01)
12 вращающаяся деталь, цилиндр
13 канал (12)
14 донная поверхность
15
16 глухое отверстие (14)
17 рабочий орган (01)
18
19
20 рабочий орган (01)
21 рабочий орган (01)
22 рабочий орган (01)
23 рабочий орган (01)
24 рабочий орган (01)
25 рабочий орган (01)
26 рабочий орган (01)
27 рабочий орган (01)
28 рабочий орган (01)
29 рабочий орган (01)
30 рабочий орган (01)
31 рабочий орган (01)
I длина бочки цилиндра (01)
А длина средняя в состоянии покоя
b большая длина
с меньшая длина
d значение предварительного напряжения (01)
Реферат
Изобретение относится к устройствам для снижения изгибных колебаний, в частности для применения в ротационных печатных машинах. Устройство снижения изгибных колебаний вращающихся деталей (01) содержит по меньшей мере один рабочий орган, расположенный в ней. Рабочий орган имеет действующую в аксиальном направлении вращающейся детали силовую компоненту, изменяемую в аксиальном направлении параллельно оси вращения (07) вращающейся детали в зависимости от положения угла поворота вращающейся детали. Технический результат заключается в снижении изгибных колебаний. 3 и 33 з.п. ф-лы, 4 ил.

Комментарии