Ротационная печатная машина с объединенными парами в группы офсетными и формными цилиндрами - RU2127668C1
Код документа: RU2127668C1
Чертежи







Описание
Изобретение касается объединения печатных цилиндров ротационной печатной машины в отдельные группы цилиндров и системы регулирования их приводов.
Традиционные ротационные печатные машины приводятся в действие главным приводом с помощью механического продольного вала, называемого также центральным валом. Недостатком этих печатных машин являются слишком большие механические затраты для компенсации появляющегося во время работы скручивания продольного вала. Вследствие этого необходима механическая регулировка приводки по окружности позиций печатаемых букв печатной машины во время работы.
Пытаются также заменить механический продольный вал между отдельными печатными секциями электрическим продольным валом. При этом каждая печатная секция получает отдельный электрический привод. В этом случае к большим механическим затратам, которые, как и прежде возникают вследствие комплексности отдельных печатных секций с несколькими позициями печатаемых букв, добавляются большие затраты, связанные с автоматическим регулированием, так как точно так же должна быть обеспечена синхронная работа печатных секций с отдельными приводами.
Для предотвращения вышеупомянутых недостатков в выложенной заявке ФРГ N 4138479 A1 предлагается приводить в действие цилиндры печатной машины соответственно с помощью собственного электродвигателя.
Из выложенной заявки ФРГ N 4214394 A1 известна система автоматического управления и регулирования для такой печатной машины соответственно с отдельными цилиндрами с собственным приводом. При этом отдельные приводы цилиндров и их регуляторы могут быть объединены в группы позиций печатаемых букв как угодно. Группы позиций печатаемых букв сопрягаются с фальцаппаратами, которыми они перекрывают опорное положение. Предложенная система управления состоит в основном из быстродействующей системы шин отдельных приводов и регуляторов приводов группы позиций печатаемых букв и из централизованной системы управления для управления группами позиции печатаемых букв.
Преследовавшаяся в этих обеих публикациях концепция цилиндров с отдельными приводами хотя и способствует гибкости использования, однако одновременно требует использования большого количества приводных двигателей и, как показывает выложенная заявка ФРГ N 4214394 A1, больших затрат на регулирование этого большого количества отдельных приводов. Помимо этого должно использоваться многообразие двигателей. В противном случае при использовании двигателей небольшой мощности необходимо было бы для различных областей применения использовать двигатели с избыточными параметрами. Все это повышает стоимость такой печатной машины.
В противоположность этому настоящее изобретение поставило перед собой задачу создания очень гибко используемой, однако экономичной ротационной печатной машины.
Эта задача решается с помощью признаков пунктов 1, 7 формулы изобретения.
Дополнительные пункты формулы изобретения ориентированы на не совсем сами собой разумеющиеся варианты выполнения предмета изобретения.
Указанная выше задача решается благодаря следующим конкретным признакам.
В ротационной печатной машине офсетные цилиндры 2 и формные цилиндры с помощью механического сочленения для их привода парами объединены в цилиндровые группы 10, каждая из которых снабжена собственным приводным двигателем 5.
Офсетный цилиндр 2 снабжен приводным двигателем 6, а формный цилиндр 3 имеет привод от офсетного цилиндра 2.
Цилиндровая группа 10 дополнительно имеет для офсетного цилиндра 2 прижимающий цилиндр 4, который механически сочленен с офсетным цилиндром 2.
Цилиндровая группа 20 с несколькими цилиндровыми группами 10 имеет центральный цилиндр 6, который оснащен собственным приводным двигателем 5 или для привода сочленен механически с офсетным цилиндром цилиндровой группы 10.
Причем для осуществления привода от приводного двигателя 5 цилиндров 2, 3 предусмотрен зубчатый ремень 11.
Кроме того, по меньшей мере один красочный валик 7 красочного аппарата или красочного и увлажняющего аппарата, который сопряжен с цилиндровой группой 10, механически сочленен с этой цилиндровой группой 10 или для привода по меньшей мере одного красочного валика 7 красочного аппарата предусмотрен собственный приводной двигатель 5.
В ротационной печатной машине по другому варианту с регулированием положения и/или частоты вращения регулируемого цилиндра цилиндровой группы или валика красочного аппарата, снабженная приводным двигателем 5 цилиндровой группы 2; 2, 3, 4 с одним датчиком заданного значения 22, с одним или несколькими датчиками действительного значения и регулятором двигателя, датчики действительного значения 21, 27 выполнены с возможностью регистрации положения и/или частоты вращения цилиндра 2, 3 или 4 цилиндровой группы 10.
При этом выданная датчиком 21; 27 действительных значений действительная величина образует основную заданную величину для регулятора 23.
Кроме того, для регулирования предусмотрен предпочтительно только датчик действительных значений для регистрации положения или числа оборотов двигателя 5.
Причем в машине предусмотрен механический датчик на двигателе 5, выходной сигнал которого используется в качестве входного сигнала для аварийного отключения двигателя 5.
Кроме того, в ротационной печатной машине датчик действительных значений 21; 27 системы регулирования расположен на ненагруженном конце вала, приводимого в действие двигателем 5 цилиндра(2 или 3, а для сочленения между приводным двигателем 5 и приводимым в действие цилиндром 2 цилиндровой группы 10 или приводимым в действие валиком 7 предназначен зубчатый ремень 15.
При этом цилиндровая группа 20 с несколькими цилиндровыми группами 10 имеет два центральных цилиндра 6, каждый из которых оснащен собственным приводным двигателем 5 и три цилиндровых группы 10 образуют одну печатную секцию.
Одна цилиндровая группа 10 расположена на одной стороне печати и две другие цилиндровые группы 10 расположены на противоположной стороне печати бумажного полотна 1.
Офсетный цилиндр 2 расположенной на одной стороне печати бумажного полотна 1 цилиндровой группы 10 образует прижимающий цилиндр для обоих попеременно используемых офсетных цилиндров 2 расположенных на противоположной стороне печати бумажного полотна 1 цилиндровых групп 10.
При этом обе горизонтально расположенные друг против друга цилиндровые группы 10 объединены в цилиндровую группу (20), которая с цилиндровыми группами 10 расположена эпсилонобразно или ламбда-образно.
Таким образом, в соответствии с изобретением офсетные и формные цилиндры ротационной печатной машины образуют парами группу цилиндров, в которой офсетный и механический цилиндры сочленены друг с другом механически и приводятся в действие вместе с помощью собственного приводного двигателя на каждую группу цилиндров.
Благодаря такому объединению парами обоих цилиндров и их оснащению единственным приводом по меньшей мере для одной пары цилиндров существенно уменьшается количество необходимых приводных двигателей по меньшей мере в два раза по сравнению с концепцией отдельных приводов. Механическое сочленение этих двух сопряженных с точки зрения техники печатания цилиндров, предпочтительно зубчатое сочленение с помощью прямозубых или косозубых шестерен, обеспечивает по сравнению с концепцией цилиндров с отдельным приводом явные преимущества в стоимости. С точки зрения гибкости использования по сравнению с концепцией отдельного привода это не имеет большого значения. Таким образом, согласованно можно осуществлять как регулировку приводки по окружности, так и регулировку поперечной приводки каждого офсетного цилиндра по отдельности и относительно любого другого офсетного цилиндра, если это необходимо. С помощью групп цилиндров в соответствии с изобретением с соответственно собственными приводными двигателями в ротационной печатной машине с технической и экономической точек зрения могут создаваться оптимальные позиции печатаемых букв. В этой связи в качестве позиций печатаемых букв следует понимать соответственно пары цилиндров, между которыми проходит запечатываемая бумажная лента и запечатывается с одной или с двух сторон. Таким образом, к образованной в соответствии с изобретением позиции печатаемой буквы соответственно относятся группа цилиндров и соответствующий прижимающий цилиндр, который может относиться к группе цилиндров, но необязательно. В упомянутом случае позиция печатаемой буквы образуется двумя сопряженными друг с другом группами цилиндров. Однако с точки зрения техники привода позиции печатаемых букв печатной машины в обоих случаях сочленены механически независимым способом, т.е. позиции печатаемых букв печатной машины сочленены друг с другом электрическим способом.
В случае использования групп цилиндров в соответствии с изобретением в действие приводится офсетный цилиндр, который в свою очередь с помощью механического сочленения передает движение на формный цилиндр той же группы цилиндров. Однако в другом варианте выполнения изобретения в движение может приводиться также вал формного цилиндра, так что офсетный цилиндр приводится в действие лишь с помощью механического сочленения от формного цилиндра. В то время как привод на формный цилиндр требует небольших затрат для отвода и подвода офсетного цилиндра, с другой стороны офсетный цилиндр имеет решающее значение для точности положения или регулировки приводки по окружности. Названное первым решение имеет преимущество, заключающееся в том, что цилиндр, который в конце концов соприкасается с запечатываемым бумажным полотном, не должен приводиться в действие с помощью возможно имеющего люфт передаточного элемента.
Предпочтительно, если на одну позицию печатаемой буквы работают соответственно три группы цилиндров. Одна группа цилиндров расположена на одной стороне печати, а две другие группы цилиндров расположены на другой стороне печати проходящего между ними бумажного полотна. При этом предпочтительно офсетный цилиндр расположенной на одной стороне печати бумажного полотна группы цилиндров образует прижимающий цилиндр для двух других офсетных цилиндров, расположенных на противоположной стороне печати бумажного полотна групп цилиндров, которые предпочтительно могут работать попеременно. Эта конфигурация обеспечивает максимальную гибкость при использовании резиновых печатных форм, так как при непрерывном производстве оба офсетных цилиндра, которые могут использоваться попеременно, могут располагаться для переналадки печати. Это осуществляется путем смены печатной формы сопряженного с неподведенным в рабочее положение офсетным цилиндром формного цилиндра. Каждая группа цилиндров может быть установлена в отдельной стойке. Предпочтительно обе горизонтально расположенные друг против друга одной стороны печати бумажного полотна группы цилиндров объединены в установленную в стойке цилиндровую группу.
Группа цилиндров может быть увеличена в соответствии с изобретением на один прижимающий цилиндр для офсетного цилиндра. Этот третий цилиндр образованной таким образом группы цилиндров механически сочленяется с офсетным цилиндром, предпочтительно с помощью другой зубчатой муфты. Такая группа цилиндров уже представляет собой позицию печатаемой буквы, между офсетным и прижимающим цилиндрами которой проходит бумажное полотно. Прижимающим цилиндром может быть стальной цилиндр или также другой офсетный цилиндр для двустороннего печатания. В частности, таким прижимающим цилиндром может быть также центральный цилиндр цилиндровой группы, например, с девятью или десятью цилиндрами.
В альтернативном также предпочтительном варианте выполнения изобретения такой центральный цилиндр может приводиться в действие собственным приводным двигателем. Этот вид объединения обеспечивает максимальную гибкость использования цилиндровой группы. Таким образом в этом случае можно реверсивно управлять каждой из сопряженных с центральным цилиндром цилиндровой группой, состоящей из офсетного и формного цилиндров, отдельно и независимо от других цилиндровых групп, как это, например, необходимо для переменного печатания или непрерывной смены печатных форм.
Привод от одного приводного двигателя на соответствующую цилиндровую группу предпочтительно осуществляется с помощью зубчатого ремня. По сравнению с предложенным в выложенной заявке ФРГ N 4138479 A1 разъединением насаженного на приводной вал приводимого в действие цилиндра ротора электродвигателя зубчатый ремень обладает большей гибкостью. Однако для концепции регулирования привода цилиндровой группы большое значение имеет обеспеченная благодаря использованию зубчатого ремня возможность демпфирования состоящей из приводного двигателя и приводных цилиндров механической системы, что еще будет пояснено ниже. Однако в принципе изобретение допускает также непосредственный привод, который при небольших цилиндрах может быть даже предпочтительным.
По сравнению с зубчатым приводом между приводным двигателем и приводимым в действие цилиндром цилиндровой группы, который также может использоваться, зубчатый ремень имеет преимущество, заключающееся в безлюфтовой работе и не абсолютно жестком передаточном отношении.
В противоположность этому для механического сочленения между цилиндрами внутри цилиндровой группы предусмотрены шестерни, хотя возможны и другие передаточные элементы. Находящиеся в зацеплении шестерни могут быть прямозубыми или косозубыми. При использовании косозубых шестерен для установки боковых упоров офсетный цилиндр перемещается в продольном направлении, в то время как его ведущие и/или ведомые шестерни в соответствии с изобретением остаются неподвижными. В противном случае потребовалась бы поперечная приводка, а также приводка по окружности. При использовании прямозубых шестерен офсетный цилиндр просто сдвигается в продольном направлении вместе с жестко закрепленной на нем шестерней или с закрепленными на нем шестернями.
Красочный валик или красочные валики, или увлажняющие валики красочного аппарата или красочного и увлажняющего аппарата, который сопряжен с одной цилиндровой группой, может или могут быть в соответствии с изобретением механически сочленены с этой цилиндровой группой, так что красочный валик или красочные валики могут приводиться в действие приводным двигателем этой цилиндровой группы.
Благодаря этому решению затраты, связанные с автоматическим управлением, можно поддерживать на низком уровне.
С другой стороны, механическое сочленение красочного аппарата в смысле модульного принципа, который преследует изобретение, не настолько идеален, как более предпочтительный собственный привод валика или валиков красочного аппарата. В соответствии с этим также предпочтительным вариантом выполнения изобретения каждый красочный аппарат имеет собственный приводной двигатель для своих красочных валиков. Такой приводной двигатель приводит в действие также предпочтительным образом с помощью работающего без зазоров зубчатого ремня с высокой степенью демпфирования и при необходимости с помощью понижающей зубчатой передачи красочный валик или в случае наличия нескольких красочных валиков ближайший к формному цилиндру соответствующей цилиндровой группы красочный валик. При этом предпочтительным образом можно устанавливать окружную скорость этого красочного валика, в частности, с отрицательным проскальзыванием относительно формного цилиндра, причем окружная скорость красочного валика предпочтительно несколько меньше, чем окружная скорость соответствующего формного цилиндра.
Особые проблемы создает регулирование системы двигатель/нагрузка с приводным двигателем цилиндра или валика ротационной печатной машины. В отдельных случаях при небольших нагрузках используется более сильный, т.е. более мощный двигатель со сравнительно высоким относительно нагрузки моментом инерции масс.
Такая система с точки зрения управления колебаниями и толчками не создает слишком больших проблем, так как нагрузка принудительным образом приводится в соответствие с мощностью двигателя. При увеличении момента инерции масс приводимых в действие нагрузок, моменты инерции масс которых часто могут быть в пять раз больше приводных двигателей, связанные с колебаниями проблемы возрастают.
Соответственно этому все более сложными становятся вопросы, связанные с регулированием этой системы двигатель/нагрузка. Гибкость сочленения между двигателем и нагрузкой еще более обостряет проблему.
В полиграфическом машиностроении системы регулирования положения или частоты вращения цилиндра известны. В этих системах используется механический датчик на стороне двигателя для регистрации частоты вращения двигателя или углового положения ротора двигателя для сравнения заданного и фактического положения системы регулирования двигателя. Однако при увеличивающихся отношениях инерции масс нагрузки к двигателю эта известная система регулирования все еще чаще наталкивается на ее динамические пределы.
Если измеряется фактическое положение на валу двигателя, то как сочленение, так и механическая нагрузка находятся вне непосредственного контура регулирования. Однако на них можно воздействовать с помощью действующих на вал двигателя ускорительных моментов. Так как результирующая нагрузка двигателя состоит из механического образования из масс, пружин и демпфирующих устройств, нагрузочный момент сильно зависит от частоты, что в конце концов определяет динамические свойства системы. При возбуждении в результате изменений заданного значения вначале сжимаются пружины, которые ближе всего находятся к двигателю.
Вызванный регулятором вращающий момент двигателя ускоряет детали сочленения и затем цилиндр или приводной вал. К этому моменту времени энергия накоплена как в пружинах, так и в движении масс, распределение которой изменяется непрерывно.
Хотя двигатель в течение короткого времени смог занять правильное положение, однако возникающими силами инерции вновь отклоняется, что приводит к другому процессу регулирования. Система должна стабилизироваться с помощью относительно медленно управляемого регулятора.
Поэтому изобретение поставило перед собой задачу создания системы регулирования, с помощью которой можно регулировать положение и/или частоту вращения цилиндра или вала, который приводится в действие двигателем, оптимально с точки зрения мощности и с достаточно высоким качеством регулирования, т.е. с точки зрения динамики и частоты вращения или точности положения. Система регулирования должна быть недорогой и не должна предъявлять высоких требований к сочленению двигателя и нагрузки, в частности, к крутильной жесткости и беззазорному сочленению.
Предпочтительно регулируется положение по меньшей мере проводных двигателей, работающих на той же стороне печатания бумажного полотна групп цилиндров цилиндровой группы. Предпочтение отдается так называемому идеальному регулированию положения, т.е. безинерционному регулированию положения с компенсацией отклонения от траектории. Однако от этого желательного по техническим соображениям дорогостоящего вида регулирования положения можно вполне отказаться. Простое регулирование положения представляет собой также предпочтительный, в частности, недорогой вариант выполнения изобретения.
Регулирование положения и/или частоты вращения регулируемого цилиндра цилиндровой группы или валика красочного аппарата осуществляется в соответствии с изобретением с помощью регулятора приводного двигателя путем сравнения заданной и действительной величин выходных сигналов задающего устройства и датчика действительных значений, причем этот датчик действительных значений регистрирует положение и/или частоту вращения цилиндра или вала. В противоположность известным системам регулирования в ротационных печатных машинах для регулирования используется датчик нагрузки. В противоположность этому в полиграфическом машиностроении до сих пор использовался механический датчик на стороне двигателя для регистрации частоты вращения двигателя или углового положения ротора двигателя для сравнения заданных и действительных величин системы регулирования двигателя. При использовании этой традиционной системы регулирования при больших соотношениях инерции масс нагрузки и двигателя быстро сталкиваются с динамическими пределами. Регулирование становится нестабильным, прежде всего начинает вибрировать двигатель, в то время как нагрузка остается относительно спокойной.
В технике регулирования для так называемых двухмассовых вибраторов известны дифференциальные включения, каскады регулирования и активные фильтры, которые однако требуют больших затрат, связанных с автоматическим регулированием. Для описанных выше систем нагрузка/двигатель, т.е. цилиндровых групп с собственным приводом, неожиданно совершенно достаточным оказалось управление в основном с помощью действительной величины, которая была определена с помощью расположенного на нагрузке, а именно на цилиндре цилиндровой группы, датчика действительных значений. Уже одного действительного значения удаления углового положения и/или одной частоты вращения соответствующего цилиндра достаточно для достижения высокой динамики и качества регулирования.
Приводной двигатель при двухмассовом вибраторе в соответствии с изобретением может быть даже оставлен без внимания. Действующая в качестве фильтра нижних частот нагрузка нечувствительна к колебаниям в противоположность значительно меньшему двигателю. С другой стороны обратными воздействиями нагрузки на приводной двигатель можно пренебречь. Недорогая вследствие ее простоты система регулирования в соответствии с изобретением дает другое преимущество, заключающееся в том, что она может также просто настраиваться на широкую полосу соотношений инерции масс между нагрузкой и двигателем и на изменяющиеся в ходе эксплуатации параметры, как, например, гибкость сочленения.
Так как в соответствии с изобретением регулируемая действительная величина снимается на нагрузке, измеряется также то, что должно точно работать, а именно нагрузка, а не двигатель. Состоящую из приводного двигателя, сочленения и нагрузки эквивалентную систему можно рассматривать как фильтр низких частот. При таком типе системы регулирования используется фильтр нижних частот системы двигатель - сочленение - нагрузка - удаление, чтобы фильтровать толчки и колебания, которые возникают в объекте регулирования. Такие толчки и колебания вводятся в регулятор в уменьшенной мере. Тем самым предотвращается опасность возбуждения. Значительно повышается благодаря этому динамика регулирования и тем самым качество регулирования по сравнению с описанным традиционным регулированием при идентичном сочленении.
Наглядно обсужденный датчик действительных значений, перемещенный со стороны двигателя на сторону нагрузки, образует основную регулируемую величину для регулятора двигателя, т.е. управление двигателем осуществляется со стороны нагрузки с помощью ее действительной величины. В соответствии с особенно предпочтительным вариантом выполнения изобретения не требуется механический датчик действительных значений для регистрации положения или частоты вращения двигателя в рамках регулирования двигателя. Предпочтительно можно использовать интегрированное при необходимости в двигателе устройство регистрации действительных значений для точного контроля двигателя, при необходимости для аварийного отключения двигателя.
Датчик действительных значений для регулирования располагается в соответствии с изобретением на ненагруженном конце вала приводного цилиндра цилиндровой группы или приводного вала красочного аппарата.
Особенно предпочтительно в качестве приводных двигателей используются электрические асинхронные двигатели. До сих пор асинхронный двигатель использовался только тогда, когда с помощью большого двигателя в действие необходимо было приводить небольшую нагрузку. Для данного случая, при котором приводной двигатель приводит в действие цилиндровую группу или также валики красочного аппарата, т.е. при котором приводимая в действие нагрузка имеет сравнительно большую инерцию масс по сравнению с приводным двигателем, использование асинхронного двигателя неизвестно. Для цели регулирования в соответствии с изобретением с датчиком нагрузки вместо датчика двигателя особенно пригодны асинхронные двигатели. По сравнению с использовавшимися до сих пор для соответствующих случаев применения двигателями постоянного тока асинхронные двигатели имеют более высокую жесткость поля, так что их использование улучшает динамику и качество регулирования регулируемой системы. В принципе не исключено использование других конструкций двигателей, например, двигателей постоянного тока.
Стабильность регулирования дополнительно улучшается благодаря предпочтительному использованию беззазорного зубчатого ремня с высоким демпфированием в качестве сочленения между двигателем и нагрузкой.
При рассматриваемом двухмассовом вибраторе приводной двигатель можно даже не принимать во внимание. Действующая в качестве фильтра нижних частот нагрузка нечувствительна к колебаниям значительно меньшего двигателя. С другой стороны можно пренебречь обратными воздействиями нагрузки на приводной двигатель.
С помощью концепции попарного объединения офсетных и формных цилиндров в цилиндровые группы, которые при необходимости расширяются другим цилиндром противодавления, достигается максимальная степень гибкости, в то время как стоимость организованной таким образом печатной машины по сравнению с печатной машиной с отдельно приводимыми в действие цилиндрами может быть значительно снижена. Для составленной из таких цилиндровых групп печатной машины требуются приводные двигатели лишь двух, во всяком случае трех классов мощности, в то время как при использовании непосредственно и отдельно приводимых в действие цилиндров по существу соответственно необходимы отдельные двигатели для цилиндров различной длины и с различными диаметрами. С помощью использованной в соответствии с изобретением зубчатой ременной передачи можно предотвратить возможно колеблющиеся в широких пределах соотношения моментов инерции масс между нагрузкой и двигателем благодаря соответствующему выбору передаточного отношения и привести в соответствие друг с другом. Сокращение количества приводных двигателей вместе с преимуществом, заключающимся в том, что должны быть подготовлены двигатели лишь в нескольких классах мощности, уже дает значительные преимущества в стоимости. Это преимущество еще усиливается благодаря использованию простой системы регулирования в соответствии с изобретением, которая также может быть приспособлена к изменяющимся соотношениям инерции масс. При этом достигнутые с помощью изобретения преимущества имеют все большее значение с увеличением размеров печатных машин, т.е. с увеличением количества печатных аппаратов и печатных позиций в машине. В частности, изобретение находит применение в строительстве ответных ротационных печатных машин; однако оно не ограничено этим типом машин.
Из выложенной заявки ФРГ N 3828338 известна печатная машина, цилиндры и валики которой приводятся в действие от главного двигателя с помощью зубчатого ремня. Двигатель регулируется с помощью снятых со стороны нагрузки действительных значений. Цилиндры и валики печатной машины сочленены друг с другом с помощью кинематической приводной цепи зубчатой передачи. С помощью описанной системы регулирования колебания в приводной кинематической цепи можно поддерживать на низком уровне лишь с трудом или с большими техническими затратами. Так как момент инерции на стороне нагрузки большой, эта система регулирования является медленно действующей и имеет во всяком случае небольшую динамику процесса регулирования.
Сущность изобретения поясняется ниже чертежами, на которых показано:
на фиг.1 - печатная секция с двумя цилиндровыми группами;
на фиг.2 - печатная
секция с одной цилиндровой группой;
на фиг. 3 - цилиндровая группа с центральным цилиндром с собственным приводом и четырьмя цилиндровыми группами;
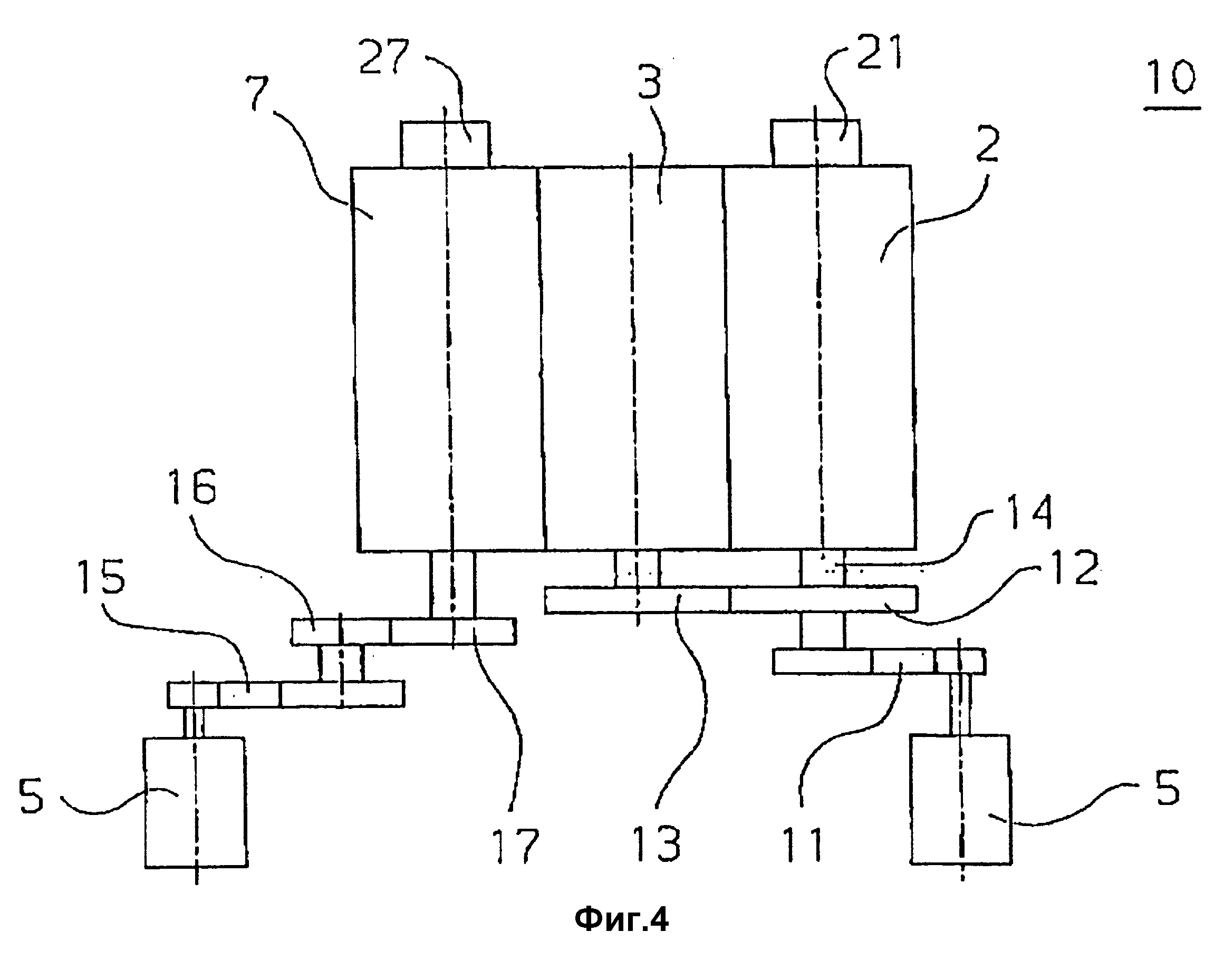
на фиг. 4 - цилиндровая группа с
сопряженным красочным валиком с собственным приводом;
на фиг. 5 - система регулирования привода цилиндровой группы в соответствии с уровнем техники;
на фиг. 6 - система
регулирования
привода цилиндровой группы в соответствии с изобретением;
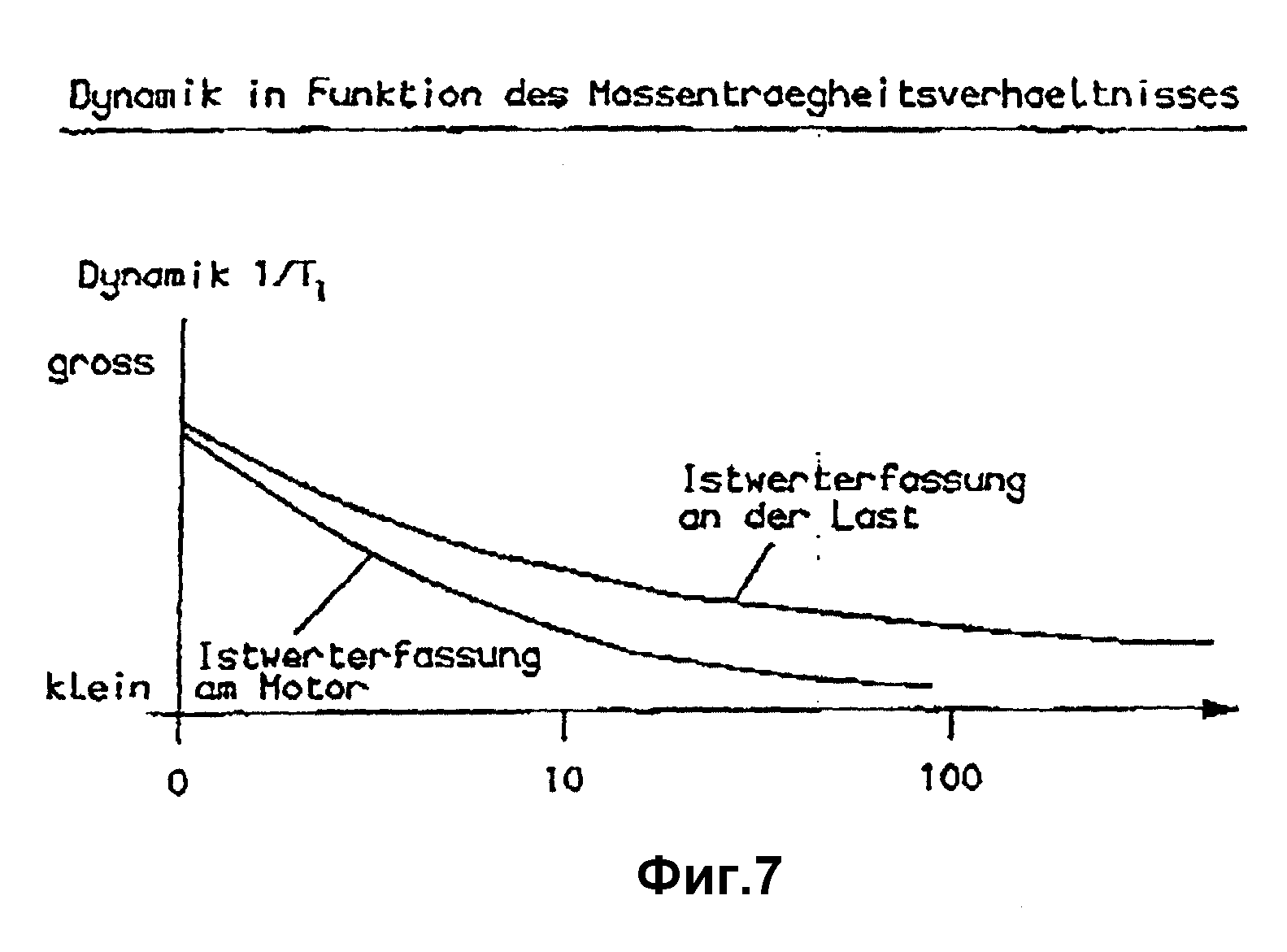
на фиг. 7 - сравнение динамических свойств традиционной системы регулирования и системы регулирования в соответствии с
изобретением в
зависимости от соотношения моментов инерции масс двигателя и нагрузки;
на фиг. 8 - сравнение динамических свойств традиционной системы регулирования и системы регулирования в
соответствии с
изобретением в зависимости от крутильной жесткости сочленения между двигателем и нагрузкой;
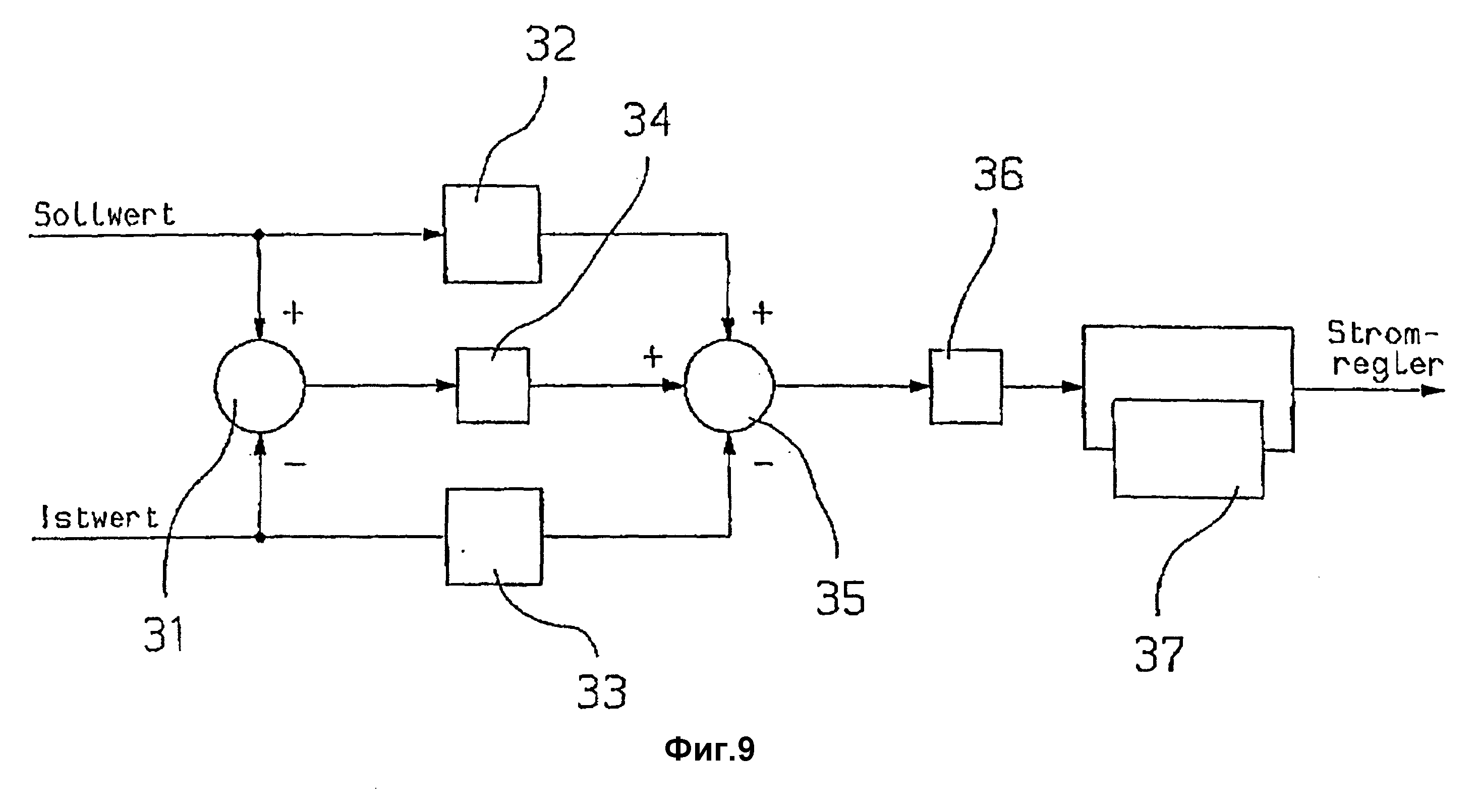
на фиг.9 - диаграмма регулирования регулятора;
на фиг. 10 - образованная
из трех
цилиндровых групп печатная позиция в У-положении;
на фиг. 11 - образованная из трех цилиндровых групп печатная позиция в ламбда-положении.
При изображенной на фиг.1 печатной секции запечатываемое бумажное полотно 1 направляется между двумя расположенными друг против друга офсетными цилиндрами 2 двух цилиндровых групп 10. Обе цилиндровые группы 10 образуются соответственно офсетным цилиндром 2 и сопряженным формным цилиндром 3, которые для общего привода механически сочленены друг с другом. Механическое сочленение схематически показано соединительной линией между центрами обоих цилиндров 2 и 3. В примере выполнения в соответствии с фиг.1 офсетные цилиндры 2 каждой цилиндровой группы 10 приводятся в действие соответственно с помощью двигателя 5 трехфазного тока. Конфигурация в соответствии с фиг.1, при которой с помощью механического сочленения в цилиндровую группу объединены соответственно только один офсетный цилиндр 2 и один формный цилиндр 3, отличается простым построением и максимально возможной степенью свободы конфигурации при образовании печатной секции или групп печатных секций.
Фиг. 2 показывает вариант образования печатной секции, при котором прижимающий цилиндр 4 для офсетного цилиндра 2 механически сочленен с этим офсетным цилиндром 2. В этом примере выполнения цилиндровая группа составляется из офсетного цилиндра 2, прижимающего цилиндра 4 и формного цилиндра 3 и их механического сочленения, так что печатная секция образуется с помощью единственной цилиндровой группы 10. В примере выполнения в соответствии с фиг.2 в противоположность фиг.1 с помощью двигателя 5 трехфазного тока в действие приводится не офсетный цилиндр 2, а сопряженный с этим цилиндром формный цилиндр 3. Преимуществом этого варианта объединения цилиндров в цилиндровую группу является постоянная рабочая характеристика вследствие механического сочленения офсетного цилиндра 2 с прижимающим цилиндром 4 и то, что вследствие этого механического сочленения не имеет места непосредственное взаимное влияние цилиндров 2 и 4. Прижимающим цилиндром 4 может быть второй офсетный цилиндр или также стальной цилиндр, например, центральный цилиндр цилиндровой группы из девяти или десяти цилиндров.
Сопряжение двигателей 5 с офсетными цилиндрами 5 или формными цилиндрами 3 в обоих примерах выполнения в принципе может заменяться. Привод формного цилиндра 3 имеет преимущество, заключающееся в том, что можно легче осуществлять реверсивное управление цилиндровой группой 10, тогда как в другом случае при приводе офсетного цилиндра 2 в действие приводится непосредственно нажимающий на бумажное полотно цилиндр и благодаря этому возможен привод, свободный от имеющих зазоры передаточных элементов, как, например, зубчатые колеса.
На фиг. 3 представлена цилиндровая группа 20, состоящая из центрального стального цилиндра 6 и четырех сопряженных с этим нейтральным цилиндром 6 цилиндровых групп 10. Соответственно офсетный цилиндр 2 и формный цилиндр 3 в этом примере выполнения объединены в цилиндровую группу 10. Для привода центрального цилиндра 6 предусмотрен собственный двигатель 5 трехфазного тока. Однако точно так же центральный цилиндр 6 мог бы образовывать с одной из четырех цилиндровых групп 10 цилиндровую группу в соответствии с представленным на фиг.2 вариантом. Благодаря этому был бы сэкономлен собственный двигатель 5 центрального цилиндра 6. Однако с другой стороны представленное на фиг. 3 объединение в минимально возможные цилиндровые группы 10 и центрального цилиндра 6 с собственным приводом в цилиндровую группу 20 обеспечивает максимально возможную гибкость с точки зрения возможностей конфигурации. Эта выведенная из описанных выше основных вариантов конфигурация цилиндровой группы 20 имеет с точки зрения техники печатания преимущество, заключающееся в том, что в определенных пределах удерживается так называемый эффект разветвления веером. Кроме того, каждый из офсетных цилиндров 2 может быть просто переключен на режим работы с помощью офсетных цилиндров. Возможности переключения на различные виды сменного печатания также не ограничиваются.
Как показывает этот пример выполнения, образованная из пар цилиндров цилиндровая группа 10 равноценна с точки зрения взаимного расположения концепции с отдельно приводимыми в действие цилиндрами.
На фиг. 4 представлено взаимодействие состоящей из офсетного и формного цилиндров 2, 3 цилиндровой группы 10 с красочным валиком 7. При этом красочный валик 7 имеет собственный привод с помощью двигателя 5, который может быть идентичен двигателю 5 цилиндровой группы 10, однако не должен быть идентичен. Двигатель 5 красочного валика приводит в действие с помощью зубчатого ремня 15 и пары зубчатых колес 16, 17 красочный валик 7, причем зубчатое колесо 17 установлено на валу красочного валика 7. Различные моменты инерции масс двигателя 5 и красочного валика 7 смягчаются благодаря надлежащему выбору передаточных отношений при отборе мощности с помощью зубчатого ремня 15 и пары зубчатых колес 16, 17.
Окружную скорость красочного валика 7 можно устанавливать с несколько отрицательным проскальзыванием относительно формного цилиндра 3. Можно противодействовать благодаря этому опасности, что образованное с помощью пары зубчатых колес 12, 13 сочленение между офсетным цилиндром 2 и формным цилиндром 3 выйдет из зубчатого зацепления.
Привод цилиндровой группы 10 осуществляется от двигателя 5 с помощью зубчатого ремня 11 на офсетный цилиндр 2. Механическое сочленение между офсетным цилиндром 2 и формным цилиндром 3 той же цилиндровой группы 10 образует два зубчатых колеса 12 и 13.
Для уменьшения большого соотношения моментов инерции масс нагрузки и двигателя, а именно цилиндровой группы 10 и двигателя 5, соответственно с помощью зубчатого ремня 11 понижается частота вращения двигателя 5. Этот зубчатый ремень 11 является эластичным соединительным элементом между двигателем 5 и приводимой в действие цилиндровой группой 10. По сравнению с в принципе также пригодным сочленением или с зубчатой муфтой с помощью зубчатого ремня 11 достигается очень высокая степень демпфирования системы, состоящей из двигателя 5 и нагрузки 10. В принципе то же самое справедливо и относительно привода красочного валика 7 и его соединительного элемента, зубчатого ремня 15. Кроме того, благодаря выбору привода зубчатым ремнем вследствие бесступенчато изменяемого передаточного отношения создается большое конструктивное свободное пространство. Двигатели 5 цилиндровой группы 10 или красочного валика 7 являются соответственно двигателями трехфазного тока с высокой жестокостью поля. В данном случае также в расчет принимается блочный принцип образования цилиндровых групп или групп валов с сочленением зубчатым ремнем для приводного двигателя, так как двигателями небольшой мощности можно оснастить все разнообразие длин и диаметров цилиндров или валов с соответственно различными моментами инерции масс.
Оба зубчатых колеса 12 и 13, которые образуют механическое сочленение между офсетным цилиндром 2 и формным цилиндром 3, могут быть косозубыми или прямозубыми зубчатыми колесами. В случае косозубых зубчатых колес офсетный цилиндр 2 при регулировке поперечной приводки перемещается в продольном направлении, в то время как зубчатое колесо 12 и соответствующее зубчатое колесо для зубчатого ремня 11 остаются неподвижными, т.е. эти оба цилиндрических колеса установлены на валу 14 цилиндра с возможностью продольного перемещения. В случае использования прямозубых зубчатых колес 12 и 13 зубчатое колесо 12 и зубчатое колесо для зубчатого ремня 11 неподвижно установлены на валу 14 и перемещаются в продольном направлении вместе с офсетным цилиндром 2 и двигателем 5 цилиндровой группы 10.
В противоположность известным в машиностроении ротационных печатных машин системам регулирования управление состоящей из двигателя 5 и нагрузки 10 системой осуществляется с помощью действительной величины, которая вырабатывается расположенным на стороне нагрузки, а именно на ненагруженном конце вала 14 офсетного цилиндра 2, механическим датчиком нагрузки 21. Такой же вид регулирования, а именно с помощью расположенного на ненагруженном конце вала красочного валика 7 датчика нагрузки 27, выбирается для регулирования частоты вращения этого красочного валика 7.
Известная в полиграфическом машиностроении система регулирования схематично представлена на фиг. 5. Регулирование двигателя 5, который с помощью эластичного сочленения 24 приводит в действие нагрузку 25, осуществляется с помощью регулятора 23. Нагрузкой 25 является тяжелый вал или тяжелый цилиндр, или соответствующая система валов цилиндров, момент инерции масс которой обычно в пять раз больше момента инерции масс двигателя 5. Однако регулирование этой системы, состоящей из двигателя и нагрузки, должно быть оптимизировано по мощности и осуществляться с высоким качеством регулирования частоты вращения или углового положения и частоты вращения нагрузки 25. При этом к сочленению 24 двигателя и нагрузки не должны предъявляться высокие требования относительно крутильной жесткости и отсутствия зазоров.
В известных системах, одна из которых представлена на фиг.5, датчик 21 действительных значений для выработки характерного для положения или частоты вращения и положения ротора двигателя 5 электрического сигнала расположен на этом роторе. Нагрузка 25 с помощью сочленения 24, которое имеет эластичность и возможно определенный зазор, закреплена на конце вала двигателя. Сочленение и нагрузка расположены вне контура регулирования. Однако они могут оказывать на него воздействие с помощью воздействующих на вал двигателя ускорительных моментов.
Эта система при больших соотношениях инерции масс нагрузки и двигателя быстро наталкивается на динамические пределы. Если регулирование нестабильно, то прежде всего вибрирует двигатель, тогда как нагрузка остается относительно спокойной.
Напротив, фиг. 3 показывает систему регулирования, в которой, как уже было представлено на фиг.4, задающее воздействие для системы регулирования вырабатывается одним датчиком 21, который расположен на нагрузке 25, а не на двигателе 5. Этот датчик 21 действительных значений расположен на свободном конце вала нагрузки, в примере выполнения - на свободном конце вала офсетного цилиндра 2 цилиндровой группы 10. Поэтому этот датчик 21 действительных значений в последующем называется датчиком нагрузки. Сочленение 24 образуется с помощью уже описанного зубчатого ремня 11 с более высокой по сравнению с непосредственным сочленением или зубчатым сочленением эластичностью, а также более высоким демпфированием. К тому же это сочленение 24 с помощью зубчатого ремня не имеет зазоров.
Необходимое для регулирования вырабатываемое датчиком 21 нагрузки действительное значение, которое представляет угловое положение офсетного цилиндра 2 или его частоту вращения и его угловое положение, подается обратно на регулятор 23. Генерируемое вычислительной машиной заданное значение датчика 22 заданных значений сравнивается с действительным значением и используется для образования регулирующего сигнала двигателя 5.
В этой системе регулирования сочленение 24 и нагрузка 25 расположены внутри непосредственного контура регулирования. Нагрузка и сочленение 24 образуют фильтр нижних частот для возникающих в объекте регулирования толчков и колебаний, которые таким образом подаются обратно в регулятор 23 лишь в уменьшенной степени и поэтому не могут привести к нежелательным возбуждениям системы регулирования. Благодаря этому существенно повышается динамика, а также качество регулирования по сравнению с традиционными системами, даже при одинаковом в остальном сочленении. Система, состоящая из регулятора, двигателя, сочленения и цилиндра, уже сама по себе значительно сильнее демпфирована. Поэтому резонансные превышения не проявляются в такой же мере. Поэтому регулятор может настраиваться быстрее, не покидая стабильную область срабатывания.
Установленное при необходимости на двигателе 5, представленное в примере выполнения в соответствии с фиг. 6 устройство регистрации действительных значений, может использоваться для дополнительного контроля двигателя 5, например, при желательной возможности аварийного отключения двигателя.
На диаграммах фиг.7 и 8 сравнивается динамическая характеристика обеих систем регулирования в соответствии с фиг.5 и 6.
В качестве меры определения динамики регулирования выбирается обратная величина времени изодрома T1 привода. На фиг.7 динамика представлена в виде функции отношения инерции масс нагрузки к инерции масс двигателя при идентичном сочленении и идентичном запасе устойчивости по фазе. При этом явно обнаруживается, что регулирование в соответствии с фиг.6 с помощью устройства регистрации действительных значений на нагрузке именно при больших соотношениях масс явно превосходит регистрацию действительных значений на двигателе в соответствии с фиг.5.
На фиг. 8 отображена динамика в виде функции крутильной жесткости сочленения 24 при постоянном соотношении инерции масс и идентичном запасе устойчивости по фазе. Здесь проявляется превосходство регулирования в соответствии с фиг. 6 особенно при низкой крутильной жесткости сочленения по сравнению с традиционным регулированием в соответствии с фиг.5.
Наконец, фиг. 9 показывает диаграмму регулирования регулятора 23. Заданное и действительное значение, в примере выполнения заданное или действительное среднее положение офсетного цилиндра, с целью образования разности заданного и действительного значений подаются на дифференциальный усилитель 31. Образованная там разность D1 подается на первый пропорциональный усилитель 34 и в виде пропорционально усиленного сигнала K1xD1 подается на второй дифференциальный усилитель 35. Параллельно заданное значение и действительное значение подаются соответственно на дифференцирующее звено 32 или 33, дифференцируются и соответствующие выходные сигналы S и S1 направляются ко второму дифференциальному усилителю 35. Образованная там сумма K1 D1 + (S-S1) усиливается во втором пропорциональном усилителе 36 и через интегрирующее звено 37 подается на регулятор тока двигателя 5.
Фиг. 10 показывает печатную секцию, которая образуется с помощью трех цилиндровых групп 10. Первая цилиндровая группа 10 расположена на одной стороне печати бумажного полотна 1, а вторая и третья цилиндровые группы 10 расположены на противоположной стороне печати этого бумажного полотна 1. Обе расположенные на той же стороне печати бумажного полотна 1 цилиндровые группы 10 могут попеременно подводиться к офсетному цилиндру 2 первой цилиндровой группы 10. Это обозначено двумя прямыми стрелками. При этом обе верхние цилиндровые группы 10, которые расположены примерно горизонтально друг против друга, объединены в цилиндровую группу 21 и как таковая группа установлена в раме машины независимо от нижней цилиндровой группы 10. Каждая цилиндровая группа вновь приводится в действие отдельно двигателем 5, как это уже имело место в случае с цилиндровыми группами 10 в соответствии с фиг.1.
Такое расположение позволяет осуществлять летучую смену производства при непрерывно продвигающемся бумажном полотне 1. Соответственно один из двух отводимых офсетных цилиндров 2 отведен, в то время как другой офсетный цилиндр находится в положении печатания относительно расположенного против офсетного цилиндра 2 первой цилиндровой группы 10.
Смена производства осуществляется известным способом путем смены печатных формных пластин сопряженного с отведенным офсетным цилиндром 2 формного цилиндра 3.
Фиг. 11 показывает альтернативную печатную секцию также с тремя цилиндровыми группами 10. Сказанное относительно расположения на фиг.10 в принципе справедливо также относительно расположения на фиг.11. В то время как три цилиндровые группы 10 системы в соответствии с фиг. 10 образуют соответственно плечи буквы "У", цилиндровые группы 10 в соответствии с фиг.11 образуют стоящую на голове букву "У" или букву "Ламбда". В системе в соответствии с фиг.11 обе нижние, горизонтально расположенные друг против друга цилиндровые группы 10, установлены в раме машины независимо от верхней цилиндровой группы 10. Обе нижние цилиндровые группы 10 образуют тем самым унифицированный узел или цилиндровую группу 21.
Системы в соответствии с фиг.10 и 11 показывают высокую гибкость образования в соответствии с изобретением цилиндровых групп и системы управления в соответствии с изобретением каждой цилиндровой группы. Особенно простым образом можно образовывать самые различные печатные секции, так как, например, цилиндровые группы 21 располагаются с цилиндровыми группами 10 (фиг.10 и 11) или несколько цилиндровых групп 21 располагаются друг над другом (фиг.1). В принципе цилиндры систем в соответствии с фиг.10 и 11 могут быть сочленены другим способом, отличным от представленного на фиг.1-4, например, с помощью единственной передачи.
Реферат
Машина предназначена для печати. Ротационная печатная машина имеет офсетные и формные цилиндры, которые парами с помощью механического сочленения объединены для их совместного привода в цилиндровые группы. Такая цилиндровая группа приводится в действие соответственно собственным приводным двигателем. Технический результат заключается в обеспечении создания гибко используемой и экономичной ротационной печатной машины. 2 с. и 16 з.п. ф-лы, 11 ил.

Формула
29.12.93 - по пп.1 - 13;
22.02.94 - по пп.14 - 18.
Комментарии