Способ и устройство управления работой устройства погрузки лесоматериалов в рабочей машине и лесозаготовительная машина - RU2755264C2
Код документа: RU2755264C2
Чертежи



Описание
Изобретение относится к способу управления работой устройства погрузки лесоматериалов в рабочей машине, причем устройство погрузки лесоматериалов прикреплено посредством устройства вращения к концу набора стрел рабочей машины для создания требуемой ориентации устройства погрузки лесоматериалов для работы, и в этом способе привязка ориентации устройства погрузки лесоматериалов, выполняемой с использованием устройства вращения, происходит на основе работы, которая должна выполняться с использованием набора стрел. Кроме того, изобретение также относится к соответствующему устройству и лесозаготовительной машине.
Лесозаготовительная машина обычно содержит подъемное устройство, содержащее набор стрел, шарнирное соединение и устройство вращения. Устройство погрузки лесоматериалов может быть прикреплено к устройству вращения, такому как, например захват, грейфер или харвестерная головка для погрузки деревьев или, соответственно, к какому-либо другому рабочему устройству для погрузки других грузов.
Посредством устройства вращения водитель лесозаготовительной машины ориентирует устройство погрузки лесоматериалов в правильном направлении для работы, поворачивая его в подходящее угловое положение относительно вертикальной оси, определяемой осевым направлением устройства вращения. Угловое положение определяется по операции, выполняемой с использованием набора стрел в данный момент времени, а также по положению рабочей машины и угловому положению набора стрел относительно выполняемой операции. Одним типичным примером этого является разгрузка и погрузка груза, образованного из лесоматериалов, нарезанных на одну или несколько длин. В обоих случаях захват поворачивают в подходящее угловое положение на обоих концах траектории движения набора стрел, в грузовом пространстве и в области штабеля или кучи. Что касается грузового пространства, захват должен быть ориентирован таким образом, чтобы деревья, которые должны быть перемещены в грузовое пространство в захвате, были параллельны продольному направлению грузового пространства, или угловое положение захвата должно быть таким, чтобы оно могло быть использовано для подбора деревьев из грузового пространства. Что касается штабеля или кучи, захват должен быть ориентирован в соответствии с соответствующими принципами таким образом, чтобы захват мог быть использован для помещения деревьев в штабель или для извлечения их из штабеля или кучи, движение клещей захвата происходит в плоскости, которая в основном перпендикулярна относительно продольного направления кусков древесины, находящихся в штабеле или куче.
Местоположение и ориентация лесозаготовительной машины относительно штабеля при загрузке или разгрузке обычно таковы, что лесозаготовительная машина расположена рядом со штабелем на стороне концов деревьев. Вследствие такого расположения захват следует переориентировать каждый раз при разгрузке и загрузке, как над штабелем, так и над грузовым пространством. Из-за повторяющихся операций управления это делает работу водителя лесозаготовительной машины рутинной, но это также требует точности.
Известно решение из публикации европейской заявки на патент ЕР 2987399, в котором работой устройства вращения управляют путем определения направления и/или скорости движения конца стрелы. Это делает реализацию затруднительной, а также содержит громоздкие вычисления. Кроме того, это мало учитывает тот факт, что из-за рабочего окружения траектории и направления движения крана не всегда являются наиболее прямыми и оптимальными. Таким образом, реализация, основанная на направлении и/или скорости конца стрелы, также увеличивает расход топлива рабочей машины. Кроме того, из публикации EP2116128 известно решение, которое содержит датчик на кране для определения расстояния между концом крана и/или углами между стрелами.
Цель настоящего изобретения состоит в том, чтобы создать способ и устройство управления работой устройства погрузки лесоматериалов в рабочей машине, которое позволяет использовать более легкое устройство и программную реализацию для более легкой ориентации устройства погрузки лесоматериалов в связи с операциями, выполняемыми с использованием набора стрел. Отличительные признаки способа согласно изобретению изложены в пункте 1 прилагаемой формулы изобретения, устройства в пункте 12, а лесозаготовительной машины в пунктах 14 и 15.
За счет привязки ориентации устройства погрузки лесоматериалов к положению конца набора стрел, определения положения конца набора стрел при выполнении работы и ориентации устройство погрузки лесоматериалов, используя устройство вращения, на основе положения конца набора стрел в соответствии с привязкой, устройство погрузки лесоматериалов можно ориентировать без существенного вмешательства оператора с помощью легкой реализации на уровне программного обеспечения. Таким образом, изобретение не требует прогнозирующих и, следовательно, сложных вычислений. Оно ускоряет работу лесозаготовительной машины. Кроме того, изобретение может быть реализовано с помощью известных датчиков. Кроме того, изобретение также можно использовать для того, чтобы избежать по существу непрерывной ориентации устройства погрузки лесоматериалов и, таким образом, ориентировать устройство погрузки лесоматериалов более энергоэффективно.
Согласно одному варианту осуществления ориентацию устройства погрузки лесоматериалов привязывают к положению конца набора стрел в одном или нескольких положениях конца набора стрел предпочтительно, например, за счет действия оператора рабочей машины. Наиболее предпочтительно, чтобы оператору нужно было только один раз в начале работы запрограммировать ориентацию устройства погрузки деревьев, прежде чем начать работу, выполняемую с использованием набора стрел.
Согласно одному варианту осуществления перед работой, выполняемой с использованием набора стрел, ориентацию устройства погрузки лесоматериалов, соответствующую положению конца набора стрел, привязывают для повторения операции, выполняемой с использованием набора стрел, по меньшей мере в двух положениях конца набора стрел, предпочтительно путем записи в память системы управления рабочей машины ориентации устройства погрузки лесоматериалов по меньшей мере в двух положениях конца набора стрел. Согласно одному варианту осуществления эти два положения являются точками или областями, связанными с конечными точками траектории движения набора стрел. Примерами этих положений являются положения конца набора стрел в области грузового пространства и штабеля, в более общем случае в намеченной области, намеченной точке и/или намеченном пространстве. Согласно одному варианту осуществления в дополнение к главным образом автоматическому ориентированию устройства погрузки лесоматериалов перемещение набора стрел, например, в случае шарниров, также может быть сохранено, чтобы направлять набор стрел по сохраненной траектории движения.
Благодаря изобретению устройство вращения, установленное на конце набора стрел, ориентирует устройство погрузки лесоматериалов, поворачивая его в определенное угловое положение, например, предварительно сохраненное угловое положение, на основе настоящего положения конца набора стрел или будущего положения конца набора стрел. Благодаря изобретению устройство вращения вращается, когда необходимо или когда это, например, наиболее выгодно с точки зрения потребления энергии (устройство вращения имеет низкое потребление энергии). Изобретение обеспечивает лучшее, чем, например, в предшествующем уровне техники управление на основе движения набора стрел, принимая во внимание различные траектории движения крана, которые отклоняются друг от друга при выполнении даже повторяющихся операций при автоматической ориентации устройства погрузки лесоматериалов. Благодаря изобретению ориентация устройства погрузки лесоматериалов предпочтительно может происходить только тогда, когда оно находится в намеченной области/в намеченной точке/в намеченном пространстве. Таким образом, т.е. избегая непрерывной ориентации устройства погрузки лесоматериалов, выполняемой на основе направления движения конца стрелы, достигается экономия, например, в расходе топлива рабочей машины.
Посредством способа согласно изобретению можно автоматизировать или полуавтоматизировать вращение устройства вращения в соответствии с рабочей ситуацией или расположением конца набора стрел или устройства погрузки лесоматериалов. В полуавтоматическом режиме оператор рабочей машины управляет набором стрел, используя конец набора стрел и расположение устройства погрузки лесоматериалов, и в этом случае система управления, в свою очередь, направляет ориентацию устройства погрузки лесоматериалов в соответствии с расположением конца набора стрел. Соответственно, в другой форме полуавтоматического режима оператор рабочей машины может участвовать в уточнении ориентации, когда автоматизация прежде всего заботится о вращении устройства вращения, то есть, о предварительной ориентации устройства погрузки лесоматериалов. Посредством изобретения часто повторяемое движение может быть автоматизировано, и, таким образом, работа оператора рабочей машины может быть облегчена, а также может быть более эффективной. Другие отличительные признаки изобретения изложены в прилагаемой формуле изобретения, а дополнительные преимущества, достигнутые с ее помощью, перечислены в части описания.
Далее изобретение, которое не ограничено вариантами осуществления, представленными ниже, описано более подробно со ссылкой на прилагаемые фигуры, на которых
На Фиг. 1 представлена упрощенная принципиальная схема примера лесозаготовительной машины, в которой может быть применено изобретение,
На Фиг. 2 и 3 представлен схематичный вид сверху этапов способа согласно изобретению,
На Фиг. 4 и 5 представлен схематичный вид сбоку этапов способа, показанных на фиг. 2 и 3,
На Фиг. 6 представлена блок-схема примера способа программирования ориентации устройства погрузки лесоматериалов,
На Фиг. 7 представлена блок-схема второго примера способа программирования ориентации устройства погрузки лесоматериалов и траектории движения набора стрел, а
На Фиг. 8 представлена блок-схема примера способа работы устройства погрузки лесоматериалов.
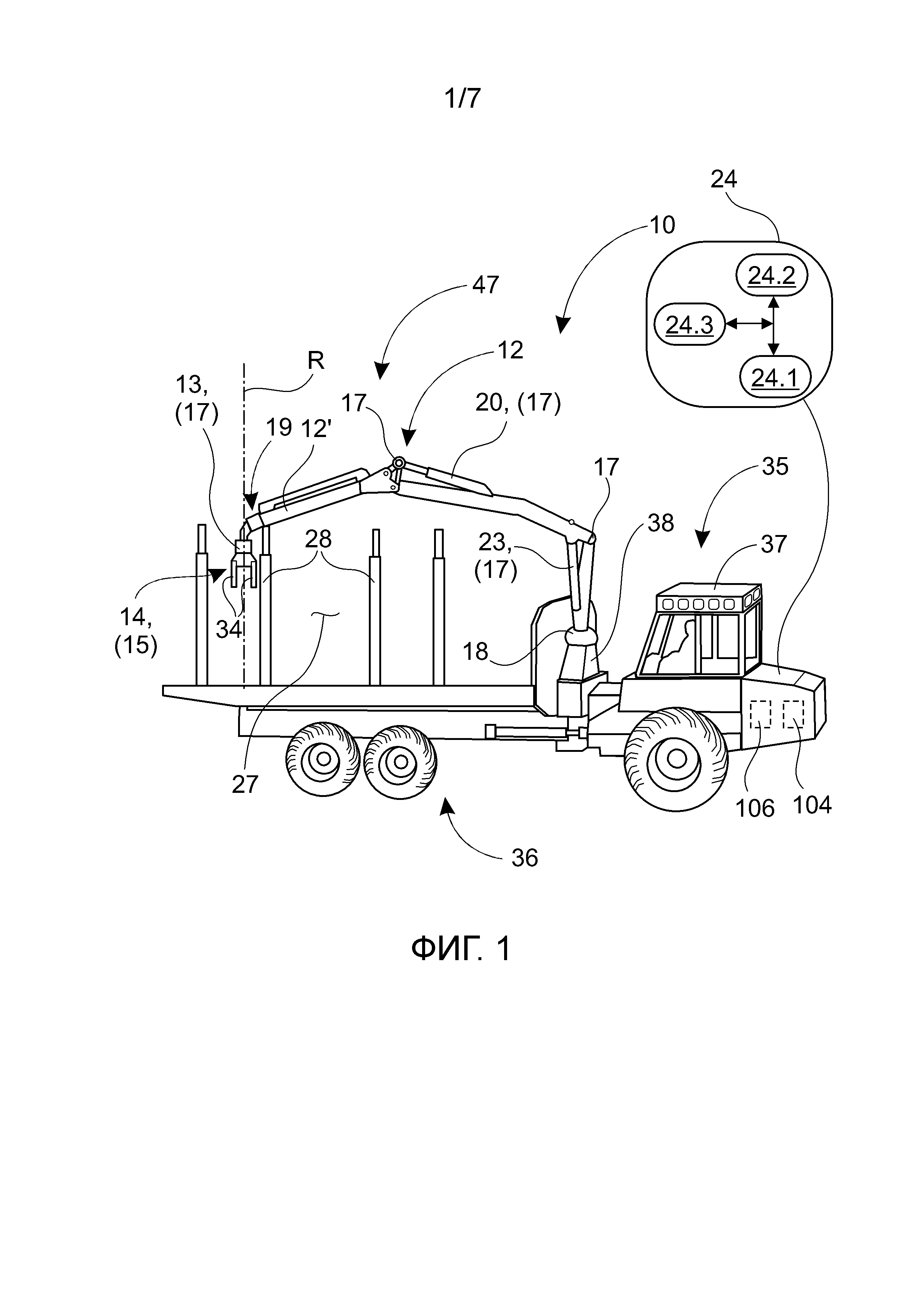
На фиг. 1 показана упрощенная принципиальная схема рабочей машины 10, в которой могут быть применены способ и устройство согласно изобретению. Лесозаготовительная машина 100, и более конкретно, форвардер теперь показана как рабочая машина 10. Форвардер содержит, как уже известно, например, шасси из двух частей, шарнирно соединенных вместе. В передней тележке 35 имеется кабина 37 и двигатели 104, а в грузовой тележке 36 - грузовое пространство 27. Грузовое пространство 27 ограничено с обеих сторон стойками 28 для груза, то есть кониками. Например, в грузовом пространстве 27 можно транспортировать деревья 16, срубленные, зачищенные и разрезанные с помощью многоцелевого станка, или лесотехнические отходы, такие как верхушки и ветви.
Форвардер также содержит, как уже известно, кран 47, расположенный, например, между кабиной 37 и грузовым пространством 27. Основание 38 крана 47 предпочтительно может быть расположено на грузовой тележке 36 или, с другой стороны, кран 47 может быть расположен поверх оси между тележками или на передней тележке 35. Кран 47 образован, как уже известно, из набора стрел 12, в котором может быть несколько стрел, повернутых друг к другу. На конце 19 самой внешней стрелы 12' из набора стрел 12 крана 47, в свою очередь, имеется устройство 14 погрузки лесоматериалов, которое в этом случае представляет собой захват 15. Вместо захвата также можно говорить о грейфере.
С помощью захвата 15 груз, в данном случае деревья 16, поднимают в грузовое пространство 27 форвардера для транспортировки, и, соответственно, груз также поднимают из грузового пространства 27 для разгрузки форвардера. В захвате 15 имеются рабочие устройства, которые приводят в действие клещи 34, которые шарнирно прикреплены к ним с возможностью поворота и которые двигаются назад и вперед друг относительно друга. Между захватом 15 и набором стрел 12 расположено устройство 13 вращения, то есть вращатель, для вращения захвата 15 и в более общем случае, устройства 14 погрузки лесоматериалов. Устройство 13 вращения прикреплено к концу 19 набора стрел 12 с помощью шарнира. Шарнирное соединение может быть выполнено с использованием так называемой скобы, которая находится между концом 19 набора стрел 12 и устройством 13 вращения. Скоба обеспечивает в основном свободное подвешивание устройства 13 вращения и прикрепленного к нему устройства 14 погрузки лесоматериалов.
Предпочтительно типичная скоба содержит два вращающихся соединения, поперечно перпендикулярных друг другу, что обеспечивает свободное подвешивание устройства 14 погрузки лесоматериалов и, главным образом, вертикально, независимо от углового положения набора стрел 12. Следует отметить, что движения набора стрел 12 и рабочей машины 10 заставляют устройство 14 погрузки лесоматериалов качаться на скобе. Следует также отметить, что, хотя устройство 14 погрузки лесоматериалов описывается как свободно подвешенное, скобы обычно также содержат тормоз, тормоз механизма поворота, который предназначен для демпфирования качания скобы и устройства 14 погрузки лесоматериалов, в частности, когда в захвате 15 есть груз. Демпфирующее качание ускоряет работу с рабочей машиной 10. Кроме того, снижается риск повреждения вследствие ударов, вызванных качанием, например, в корпус рабочей машины 10.
Устройство 14 погрузки лесоматериалов, например, захват для погрузчика, показанный далее в настоящем документе, прикреплено к устройству 13 вращения, которое также обычно называют вращателем. Устройство 14 погрузки лесоматериалов может вращаться с помощью устройства 13 вращения вокруг оси устройства 13 вращения, предпочтительно неограниченно вокруг оси R вращения устройства 13 вращения. Таким образом, устройство 14 погрузки лесоматериалов прикреплено к концу 19 набора стрел 12 рабочей машины 10 через устройство 13 вращения, чтобы создать требуемую ориентацию для работы устройства 14 погрузки лесоматериалов. Операцией может быть, например, перемещение груза, в данном случае деревьев 16, с одного места в другое. Устройство 13 вращения, а так же устройство 14 погрузки лесоматериалов получают свою рабочую мощность, например, от потока рабочей среды под давлением. Она может проходить через набор стрел 12 с помощью шлангов, в более общем случае, трубопроводов для рабочей среды под давлением от насоса 106 рабочей среды под давлением лесозаготовительной машины 100. Чтобы создать давление, насос 106 рабочей среды под давлением вращается, например, с помощью двигателя 104 лесозаготовительной машины.
В связи с этим следует также понимать, что в дополнение к лесозаготовительной машине 100 способ и устройство согласно изобретению также пригодны для использования, например, в экскаваторах и других рабочих машинах, оборудованных набором рабочих стрел, в которых инструмент прикреплен к набору рабочих стрелы посредством устройства 13 вращения.
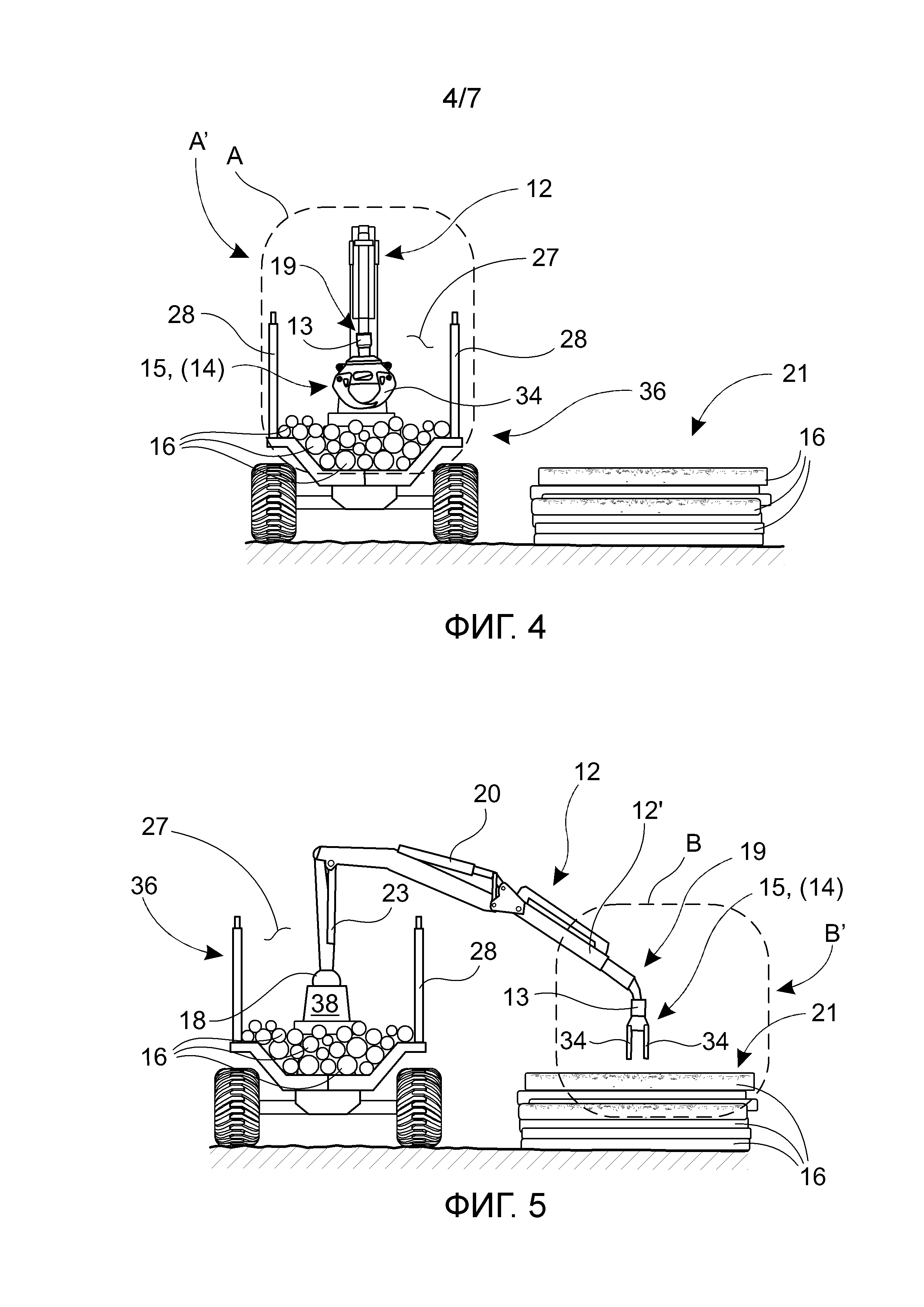
Различные варианты осуществления способа управления работой устройства 14 погрузки лесоматериалов в рабочей машине 10 описаны со ссылкой на фиг. 2-8. На фиг. 2 и 3 показаны схематичные виды сверху этапов способа согласно изобретению, а на фиг. 4 и 5 - соответствующие виды сбоку этапов способа, показанных на фиг. 2 и 3 согласно одному варианту осуществления изобретения. На Фиг. 6-8 показаны примеры способа в виде блок-схем. Примером варианта осуществления, показанным здесь, является выгрузка груза из форвардера в штабель или загрузка форвардера, когда деревья 16 перемещают из штабеля (или кучи) в грузовое пространство 27 форвардера. Таким образом, устройство 14 погрузки лесоматериалов, используемое в примере, представляет собой захват 15 для погрузки деревьев 16 или других объектов или перемещения затем из одного места в другое.
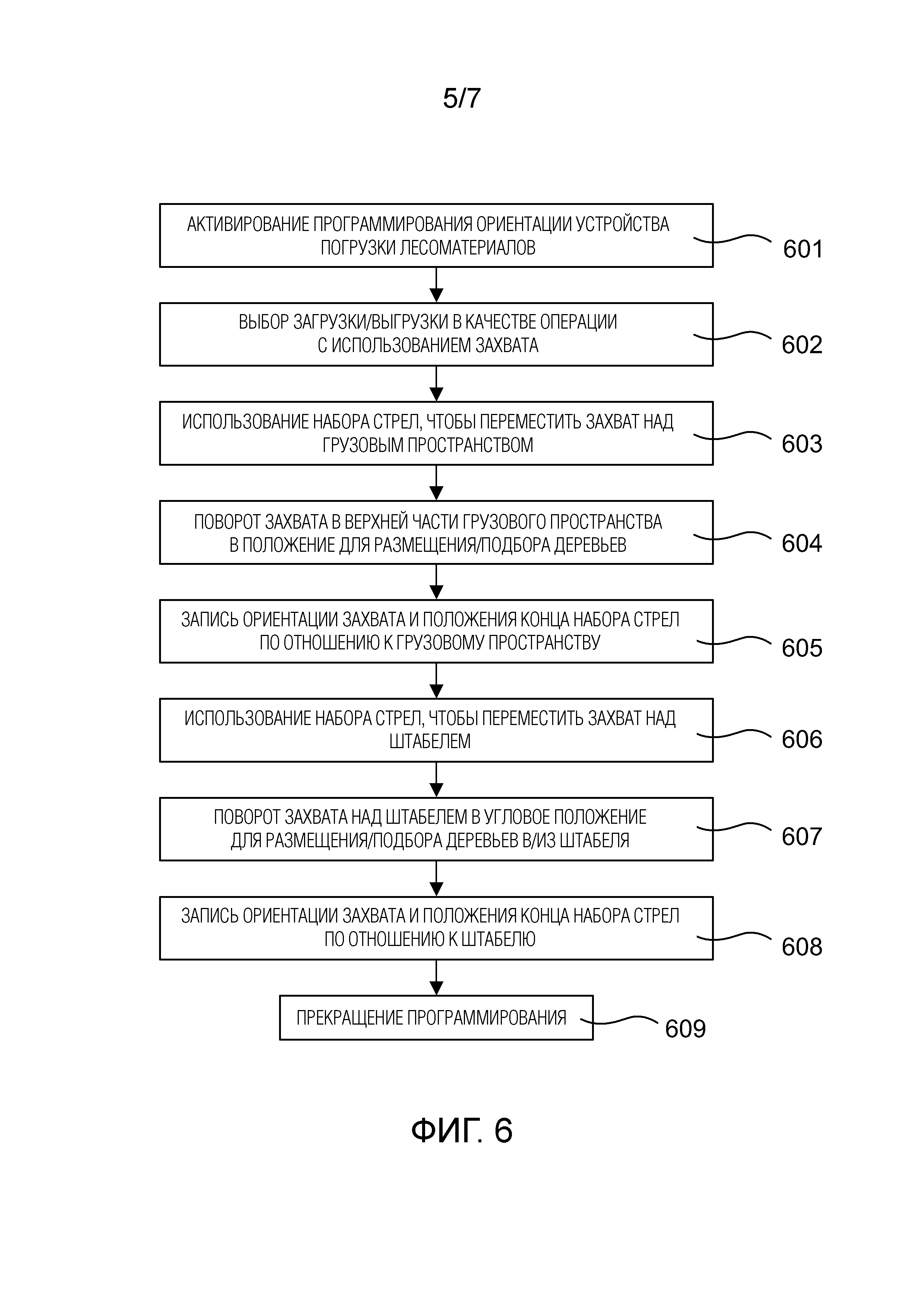
На Фиг. 2 и 4 показано устройство исходной ситуации с описанием способа. Согласно одному варианту осуществления способа оператор рабочей машины 10, то есть в этом случае водитель форвардера, выполняет программирование ориентации устройства 14 погрузки лесоматериалов перед выполнением рабочих операций с ним. На Фиг. 6 показан пример блок-схемы, относящейся к этому.
На этапе 601 программирование ориентации устройства 14 погрузки лесоматериалов активируется водителем или активируется автоматически через систему 24.1 управления форвардера. Активация системы 24.1 управления на пользовательском интерфейсе может привести к этапу 602, в котором затем можно дополнительно конкретизировать объект программирования ориентации, которая должна быть выполнена с использованием набора стрел 12, в соответствии с намеченной операцией. На этапе 602 в качестве операции, которая должна быть выполнена, выбирают загрузку/выгрузку форвардера с использованием захвата 15. Таким образом, можно сказать, что ориентацию устройства 14 погрузки лесоматериалов с использованием устройства 13 вращения в способе привязывают на основе операции, выполняемой с использованием набора стрел 12. В случае согласно примеру, операцией является загрузка или разгрузка форвардера. В общем, операцией является использование крана или работа с краном для перемещения и погрузки товаров или объектов.
На этапе 603 захват 15 перемещается набором стрел 12 в верхнюю часть грузового пространства 27. Оператор 10 рабочей машины выполняет это перемещение, управляя набором стрел 12. Затем захват 15 может находиться над грузовым пространством 27, а также над стойками 28 для груза. Захват 15 направляют в такое положение над грузовым пространством 27, чтобы его можно было вращать и, таким образом, свободно ориентировать с использованием устройства 13 вращения, даже если в захвате 15 могут быть деревья 16.
На этапе 604 захват 15 поворачивают поверх грузового пространства 27 в угловое положение для укладки деревьев 16 в грузовое пространство 27 или в качестве альтернативы, для подбора деревьев 16 из грузового пространства 27. Оператор 10 рабочей машины также выполняет это вращательное движение, используя систему 24.1 управления. Затем захват 15 ориентируют над грузовым пространством 27 таким образом, чтобы его клещи 34 открывались по направлению к стойкам 28 для груза на обоих краях грузового пространства 27 и, например, дерево 16 также может быть подобрано из грузового пространства 27 захватом 15, когда он открыт. На этапе 605 ориентацию захвата 15 по отношению к грузовому пространству 27, теперь, более конкретно, поверх него, сохраняют в памяти 24.3 системы 24.1 управления рабочей машины 10. Сохранение активирует водитель рабочей машины 10. Данные углового положения устройства 13 вращения, определенные с использованием датчиков, предпочтительно данные, предоставляемые датчиком угла наклона об угловом положении или ориентации устройства 13 вращения, затем сохраняют в памяти 24.3 в качестве входных данных. В дополнение к ориентации захвата 15 в памяти 24.3 также сохраняют положение A конца 19 набора стрел 12 над грузовым пространством 27 в то же самое время. Затем, например, данные, предоставленные датчиками 17 рабочих устройств 20, 23 набора стрел 12, и/или данные, предоставленные датчиками 17, определяющими положения углов поворота шарниров набора стрел 12, сохраняют в памяти 24.3 в качестве входных данных. Кроме того, например, данные, предоставляемые датчиком угла устройства 18 вращения набора стрел 12, также сохраняют в памяти 24.3 в качестве входных данных. Положение А конца 19 набора стрел 12 также определяет положение захвата 15 для его ориентации. Если конец 19 набора стрел 12 находится здесь в положении A (вверху грузового пространства 27), сохраненном в памяти 24.3 системы 24.1 управления рабочей машины 10, то известно, что захват 15 тогда расположен по отношению к грузовому пространству 27 так, чтобы он был ориентирован таким образом, как это сохранено в памяти 24.3 системы 24.1 управления рабочей машины 10.
На этапе 606 захват 15 с использованием набора стрел 12 перемещают поверх штабеля 21 или, в более общем случае, в область B штабеля 21. Оператор рабочей машины 10 также выполняет это перемещение, управляя набором стрел 12 посредством системы 24.1 управления. На этапе 607 захват 15 ориентируют сверху или в области штабеля 21, поворачивая его в угловое положение, в котором можно укладывать деревья 16 из захвата 15 в штабель 21 (или в место, в котором будет образован штабель 21) или, в качестве альтернативы, забирать деревья 16 из штабеля 21 в захват 15. Оператор рабочей машины 10 выполняет этот захват 15, также ориентируя вращение через систему 24.1 управления рабочей машины 10. Затем захват 15 ориентируют над штабелем 21 таким образом, что происходит раскрытие клещей 34 захвата 15, то есть направление перемещения клещей 34 направлено к крайним деревьям в штабеле 21 и, например, можно использовать захват 15, чтобы подобрать дерево 16 из штабеля 21. На этапе 608 ориентацию захвата 15 по отношению к штабелю 21, теперь конкретно над ним или в его области, сохраняют в памяти 24.3 системы 24.1 управления рабочей машины 10. Затем данные углового положения устройства 13 вращения, определенные датчиками 17, предпочтительно данные, предоставленные датчиком угла об угловом положении или ориентации устройства 13 вращения, снова сохраняют в качестве входных данных в памяти 24.3. В дополнение к сохранению ориентации захвата 15 одновременно также сохраняют положение B конца 19 набора стрел 12, которое определяет положение захвата 15 по отношению к штабелю 21. Данные, полученные, например, от датчиков 17 рабочих устройств 20, 23 набора стрел 12 и от датчика угла устройства 18 вращения набора стрел 12, затем сохраняют в качестве входных данных в памяти 24.3. Если конец 19 набора стрел 12 находится здесь в положении, которое хранится в памяти 24.3 системы 24.1 управления рабочей машины 10, то есть в области В штабеля 21, то известно, что захват 15 расположен по отношению к штабелю 21 так, что он должен быть ориентирован таким образом, который хранится в памяти 24.3 системы 24.1 управления рабочей машины 10. Программирование прекращается на этапе 609. В результате процедуры ориентация устройства 14 погрузки лесоматериалов теперь привязана к положению A, B конца 19 набора стрел 12.
На фиг. 7 показан еще один вариант осуществления программирования ориентации устройства 14 погрузки лесоматериалов для работы, выполняемой с использованием набора стрел 12. В других отношениях это соответствует процедуре, показанной на фиг. 6, но теперь также предусматривает сохранение траектории движения набора стрел 12. Этапы 701-709 могут соответствовать этапам 601-609, описанным по отношению к фиг. 6. После этапа 706 может быть этап 706', в котором данные о траектории движения набора стрел 12, когда захват 15 перемещается набором стрел 12 из верхней части грузового пространства 27 в верхнюю часть или область штабеля 21, сохраняют в памяти 24.3 системы 24.1 управления рабочей машины 10. Соответственно, после этапа 709 также может быть этап 709', в котором данные о траектории движения набора стрел 12, когда захват 15 перемещается набором стрел 12 из верхней части или из области штабеля 21 в верхнюю часть грузового пространства 27, сохраняют в памяти 24.3 системы 24.1 управления рабочей машины. Используя этот вариант осуществления, в дополнение к ориентации устройства 14 погрузки лесоматериалов, привязанной к положениям A, B конца 19 набора стрел 12 может быть автоматизирована траектория движения набора стрел 12 между положениями A, B. Данные о траектории движения могут включать в себя, например, угловое положение и угол поворота набора стрел, углы поворота стрел, относящихся к набору стрел 12, угловые положения рабочих устройств, таких как гидравлические цилиндры, относящиеся к набору стрел 12, и положение устройства 14 погрузки лесоматериалов. Входные данные, сформированные датчиками, сохраняют в памяти 24.3.
В результате блок-схем на фиг. 6 и 7 ориентацию устройства 14 погрузки лесоматериалов привязывают к положению конца 19 набора стрел 12 в одном или нескольких положениях A, В конца 19 набора стрел 12. Теперь привязка достигается благодаря действиям оператора рабочей машины 10. Поскольку положения штабеля 21 и рабочей машины 10 друг относительно друга могут сильно варьировать, благодаря способу оператор рабочей машины 10 может гибко и легко программировать ориентацию устройство 14 погрузки лесоматериалов в соответствии с каждой ситуацией. С другой стороны, привязка, конечно, также может быть установлена, по меньшей мере, в некоторой части в системе 24.1 управления уже во время изготовления рабочей машины 10. Это может быть, например, положение конца 19 набора стрел 12 внутри грузового пространства 27, когда ориентация устройства 13 вращения такова, что угловое положение устройства 14 погрузки лесоматериалов подходит для погрузки и перемещения деревьев 16, находящихся в грузовом пространстве 27. Разгрузка/извлечение груза из штабеля 21, оставшегося на левой/правой стороне рабочей машины, является еще одним примером. Однако расположение рабочей машины 10 относительно штабеля 21 задают, главным образом, в стандартной форме (рабочая машина 10 расположена под прямым углом к штабелю 21 по отношению ее концу). Если рабочая машина 10 находится под углом, отклоняющимся от прямого угла относительно штабеля 21, то программирование может выполнять оператор 10 рабочей машины.
В примерах, показанных на фиг. 6 и 7, программирование ориентации устройства 14 погрузки лесоматериалов выполняется в качестве примера в отдельных пространственных точках. Однако специалист в данной области техники должен понимать, что вместо отдельных точек ориентация также может быть привязана к пространству движений, то есть к местоположению между конкретными точками, другими словами, в более общем смысле, к намеченной области и/или намеченному объему А'-С'. Это также может программировать водитель. Затем устройство 13 вращения поворачивают в определенное заданное угловое положение в определенной области расположения конца 19 набора стрел 12, например, в области грузового пространства 27, в соответствии с продольным направлением деревьев 16 в грузовом пространстве 27, таким образом, подходящее для погрузки и перемещения деревьев 16 в грузовом пространстве 27, или, соответственно, вверху штабеля 21 в соответствии с продольным направлением деревьев 16, находящихся в штабеле 21, таким образом, подходящее для погрузки и перемещения деревьев 16, находящихся в штабеле 21. Ориентация также может быть привязана к границам грузового пространства 27, которые образуют, например, стойки 28 для груза. Положение в любой момент конца 19 набора стрел 12 соответствует определенному угловому положению стрел и шарниров, относящихся к набору стрел 12. Угловое положение в любой момент конца 19 набора стрел 12 может быть определено и ограничено, например, относительно рабочей машины 10 (некоторой конкретной конструкции) или также относительно выполняемой операции.
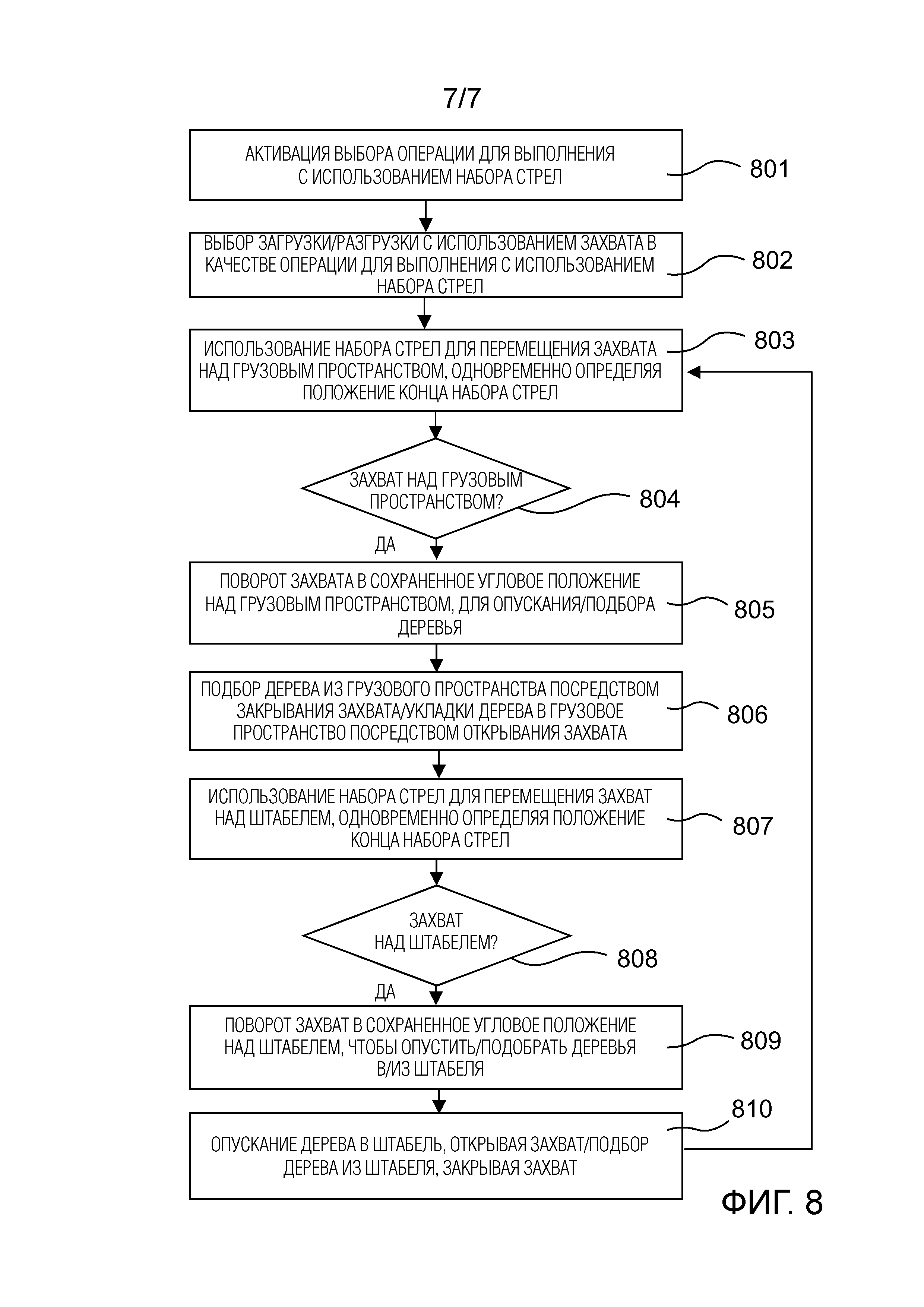
Со своей стороны, на фиг. 8 показана блок-схема одного варианта осуществления, в котором программирование и автоматические ориентации, выполняемые на фиг. 6 и 7, используются в отношении разгрузки и погрузки рабочей машины 10, в более общем смысле, в операциях, выполняемых с использованием набора стрел 12. Таким образом, перед операцией, выполняемой с использованием набора стрел 12, ориентацию устройства 14 погрузки лесоматериалов, соответствующую положению А, В конца 19 набора стрел 12, привязывают для повторения операции, выполняемой с использованием набора стрел 12, по меньшей мере в двух положениях А, В конца 19 набор стрел 12, предпочтительно путем сохранения ориентации устройства 14 погрузки лесоматериалов по меньшей мере в двух положениях А, В конца 19 набора стрел 12 в памяти 24.3 системы 24.1 управления рабочей машины 10.
Термин рабочее положение также может использоваться для положений A, B. В рабочем положении обычно существует необходимость ориентировать устройство 14 погрузки лесоматериалов, используя устройство 13 вращения, особым образом, требуемым для работы и/или обеспечивающим ее, для выполнения операции с использованием устройства 14 погрузки лесоматериалов. Например, операция, связанная со штабелем или грузовым пространством, заключается в подборе дерева захватом или размещении его в штабеле или грузовом пространстве. В дополнение к/вместо областей конечных точек траектории движения набора стрел, операция также может относиться к операции, которая должна выполняться с использованием набора стрел в области траектории движения, например, избегая штабелей груза при операции погрузки. Рабочее положение может быть определено, например, посредством использования рабочей точки, посредством формирования рабочей области и/или рабочего объема или путем ограничения двумя или более рабочими точками. Непрерывная переориентация устройства 14 погрузки лесоматериалов по всей области траектории его движения исключается благодаря ориентации устройства 14 погрузки лесоматериалов, происходящей в рабочем положении.
На этапе 801 выбор операции, которая должна быть выполнена с использованием набора стрел 12, активируется из системы 24.1 управления рабочей машины 10. Эта активация может происходить автоматически с помощью системы 24.1 управления или по выбору водителя. Активация может привести в пользовательском интерфейсе системы 24.1 управления к этапу 802, в котором более точно может быть определен объект операции, для выполнения которого с использованием набора стрел 12 она предназначена. На этапе 802 операция, которая должна выполняться с использованием набора стрел 12, устанавливают как загрузку/разгрузку форвардера с использованием захвата 15. В рассматриваемом примере должна выполняться точная разгрузка. Обычно операция, выполняемая с использованием набора стрел 12, зависит от рабочей машины. Она определяется работой, которая должна быть выполнена с использованием набора стрел 12 и инструмента, который должен быть прикреплен к набору стрел 12. Таким образом, этот этап 802 не является критическим с точки зрения работы согласно изобретению.
На этапе 803 захват 15 перемещается набором стрел 12 в верхнюю часть грузового пространства 27, одновременно определяя и, главным образом, непрерывно, положение конца 19 набора стрел 12 при выполнении работы с набором стрел 12. Движение теперь выполняется водителем рабочей машины 10. На этапе 804 система 24.1 управления рабочей машины 10 используется для проверки того, находится ли захват 15 над областью, определенной как грузовое пространство 27. Если система 24.1 управления рабочей машины 10 обнаруживает, что конец 19 набора стрел 12 и, таким образом, также прикрепленный к нему захват 15 находится над грузовым пространством 27 (в области A), то на этапе 805 захват 15 автоматически поворачивается системой 24.1 управления рабочей машины 10 над грузовым пространством 27 в угловое положение, предварительно сохраненное в памяти 24.3, для подбора деревьев 16 из грузового пространства 27 (или для помещения деревьев в грузовое пространство 27). Таким образом, устройство 14 погрузки лесоматериалов ориентируют с использованием устройства 13 вращения на основе положения А конца 19 набора стрел 12 в соответствии с сохраненной, в более общем смысле, установленной связью. При разгрузке захват 15 поворачивается в положении A в угловое положение, так что его открывающее движение происходит в основном в перпендикулярном направлении относительно продольного направления деревьев 16, находящихся в грузовом пространстве 27. Затем открытый захват 15 может захватывать деревья в грузовом пространстве 27 своими клещами 34. Соответственно, при погрузке деревья 16, доставляемые в грузовое пространство 27 захватом 15, поворачивают захватом 15 в положение A, параллельное продольному направлению грузового пространства 27, то есть рабочей машины 10.
На этапе 806 дерево 16 может быть подобрано из грузового пространства 27 посредством закрывания захвата 15 (или, в качестве альтернативы, дерево 16 может быть помещено в грузовое пространство 27 посредством открывания захвата 15). Открывание или закрывание захвата 15 может выполнять оператор рабочей машины 10. На этапе 807 захват 15 перемещается набором стрел 12 в верхнюю часть штабеля 21, снова определяя в то же время положение конца 19 набора стрел 12 при выполнении работы с помощью набора стрел 12. Движение теперь снова выполняется водителем рабочей машины 10. На этапе 808 система 24.1 управления рабочей машины 10 используется для проверки того, находится ли захват 15 над или в области штабеля 21. Если система 24.1 управления рабочей машины 10 обнаруживает, что конец 19 набора стрел 12 и, таким образом, также прикрепленный к нему захват 15 находится над штабелем 21 (в области B), то на этапе 809 захват 15 автоматически поворачивается системой 24.1 управления рабочей машины 10 над штабелем 21, то есть в положении B, в угловое положение, предварительно сохраненное в памяти 24.3, чтобы использовать захват 15 для размещения деревьев 16 в штабеле 21 (или использовать захват 15 для их извлечения из штабеля 21). Таким образом, исходя из положения B конца 19 набора стрел 12, устройство 13 вращения используется для ориентации устройства 14 погрузки лесоматериалов в соответствии с сохраненной, в более общем смысле, установленной связью.
При разгрузке форвардера деревья 16, доставляемые в штабель 21 с помощью захвата 15, поворачивают с помощью захвата 15, например, над штабелем 21, параллельно деревьям 16, которые уже находятся в штабеле 21. Соответственно, при загрузке форвардера захват 15 поворачивается в угловое положение, в котором направление раскрытия его клещей 34 в основном перпендикулярно продольному направлению деревьев 16, находящихся в штабеле 21. Захват 15 может затем использоваться для захвата деревьев 16, находящихся в штабеле 21 с помощью клещей 34. Согласно одному варианту осуществления в одном или обоих местах конца 19 набора стрел 12 предыдущий подъем может быть использован в качестве ориентира. Ориентация устройства 14 погрузки лесоматериалов и данные углового положения устройства 13 вращения затем сохраняются, например, во время работы, в определенном месте для формирования определенной ориентации. В связи с этим можно сохранить ориентацию захвата 15, в которой он теперь может быть предварительно ориентирован. Таким образом, можно сказать, что ориентация также зависит от местоположения. Она может быть определена как предустановка или в режиме реального времени как изменение области и/или сектора набора стрел 12 по мере прохождения выполняемой операции.
На этапе 810 дерево 16 укладывают в штабель 21 путем открывания захвата 15 (или, альтернативно, дерево 16 выбирают из штабеля 21 посредством закрывания захвата 15). Отсюда можно перейти, например, к этапу 803 и продолжить операцию, которая должна быть выполнена с использованием набора стрел 12. Благодаря изобретению устройство 13 вращения может вращаться только тогда, когда это необходимо, например, непосредственно перед операцией (подбор дерева) или когда это наиболее выгодно, например, с точки зрения потребления энергии.
Исходя из вышеизложенного, ориентация устройства 14 погрузки лесоматериалов, выполняемая с использованием устройства 13 вращения, связана с операцией, которая должна выполняться с использованием набора стрел 12. В этом примере эта операция состояла в разгрузке и погрузке. Кроме того, ориентация устройства 14 погрузки лесоматериалов связана с положением конца 19 набора стрел 12, которое также может быть определено, как область A, B, а не как точка абсолютного местоположения. В этом примере положения были связаны с грузовым пространством 27 (над/в области) A и связаны со штабелем 21 (над/в области) B.
В примере, показанном на фиг. 8, водитель рабочей машины 10 управляет набором стрел 12, а рабочая машина 10 автоматически управляет устройством 13 вращения в соответствии с ситуацией/местоположением. Согласно соответствующему принципу, когда автоматическая ориентация устройства 14 погрузки лесоматериалов была выполнена с использованием устройства 13 вращения, в блок-схеме фиг. 8 также может быть организовано повторение траектории движения, сохраненной в памяти 24.3 для набора стрел 12 в блок-схеме, показанной на фиг. 7, при перемещении устройства 14 погрузки лесоматериалов из грузового пространства 27 в штабель 21 и наоборот. Таким образом, согласно одному варианту осуществления система 24.1 управления также может выполнять перемещение автоматически при условии, что данные о траектории движения набора стрел 12 сохранены для повторения траектории движения, или при условии, что для конца 19 набора стрел 12 определена конечная точка траектории движения, в которую система 24.1 управления направляет конец 19 набора стрел 12 вместе с устройством 14 погрузки лесоматериалов.
Таким образом, перед выполнением операции, выполняемой с использованием набора стрел 12, сохраняют данные о траектории движения при операции, которая должна выполняться набором стрел 12, или данные о положении конца 19 набора стрел 12. Положение конца 19 набора стрел 12 известно или может быть вычислено, если известно угловое положение стрел и/или шарниров набора стрел 12. Здесь данные траектории движения представляют собой, например, направление одного или нескольких углов поворота в намеченное угловое положение или направление угла поворота набора стрел 12 в намеченное угловое положение, или, например, направление устройств управления набором стрел 12 в намеченное угловое положение. Тогда это может быть также сохранение точек траектории движения, когда повторением является движение между точками. Например, при повторении траектории движения можно проходить один или несколько углов поворота путем повторения сохраненных данных о траектории движения, которыми могут быть данные об управлении углом поворота. Кроме того, также при выполнении операции с использованием набора стрел 12 положение конца 19 набора стрел 12 изменяется в соответствии с сохраненными данными траектории движения или данными положения конца 19 набора стрел 12. Кроме того, положение конца 19 набора стрел 12 известно или может быть вычислено, если известно угловое положение набора стрел 12 и/или шарниров. Тогда набор стрел 12 перемещается главным образом автоматически системой 24.1 управления рабочей машины 10 без существенного вмешательства пользователя, и устройство 13 вращения повторяет ориентации, установленные для него в концах траектории движения или вдоль траектории движения. Это также облегчает работу водителя рабочей машины.
Положение A, B конца 19 набора стрел 12, к которому привязана ориентация устройства 14 погрузки лесоматериалов, можно понимать, например, как группу точек в пространстве A'-C' местоположений, например, как объем местоположений. Таким образом, позиция A, B, C не обязательно должна быть единственной фиксированной точкой местоположения в пространстве A'-C' местоположений, вместо этого для нее могут быть определены границы. Границы могут определять двухмерную область или даже трехмерное пространство, такое как показано в качестве одного примера варианта осуществления на фиг. 2-5. Согласно одному варианту осуществления водитель рабочей машины 10 может определять пространство A'-C' местоположений, в котором необходимо установить ориентацию устройства 14 погрузки лесоматериалов. С другой стороны, пространство A'-C' местоположений может, в случае некоторого положения, например, грузового пространства 27 или штабеля 21 или кучи, уже быть предварительно задано в системе 24.1 управления рабочей машины 10. В случае, когда двух или трехмерная область является определяющей для ориентации устройства 14 погрузки лесоматериалов набора стрел 12, в случае грузового пространства 27 область может быть определена как область, которая ограничена стойками для груза, и предпочтительно также объем грузового пространства 27, ограниченный кониками. На практике, однако, следует отметить, что ориентация устройства 14 погрузки лесоматериалов, в частности, если в захвате 15, есть дерево, выполняется над грузовым пространством 27, чтобы избежать удара о коники при вращении захвата 15. Кроме того, в случае, например, штабеля/кучи или, соответственно, грузового пространства 27, область или объем могут быть определены, как ограниченные конкретными координатами в наборе координат движения траектории движения набора стрел 12. Другим способом определения области является расстояние от границы до конкретной определенной точки.
Стойки для груза грузового пространства 27 представляют собой конструкции, которые по существу образуют дно грузового пространства 27, являясь, в основном, стальными балками, которые могут иметь различную форму для формирования дна грузового пространства 27 и, возможно, частично краев грузового пространства 27. Вертикальные стойки 28 для груза прикреплены к коникам и определяют высоту грузового пространства 27.
Согласно еще одному варианту осуществления при выполнении работы с набором стрел 12 можно одновременно использовать средства 17 измерения для наблюдения за рабочей средой, чтобы обнаруживать препятствия 22 (фиг. 2 и 3). Препятствия 22 могут находиться перед набором стрел 12, перед устройством 14 погрузки лесоматериалов, прикрепленным к концу набора стрел 12, и/или перед грузом в устройстве 14 погрузки лесоматериалов. Средства 17 измерения могут находиться на рабочей машине 10, на ее наборе стрел 12, на устройстве 13 вращения и/или на устройстве 14 погрузки лесоматериалов. На основании проведенных наблюдений, определенного положения конца 19 набора стрел 12 и намеченной точки конца 19 набора стрел 12 может быть создан управляющий сигнал для управления работой устройство 13 вращения и/или для направления конца 19 набора стрел 12 в намеченное положение или точку, избегая при этом обнаруженных препятствий 22. На основе определенного положения конца 19 набора стрел 12 и созданного управляющего сигнала устройство 14 погрузки лесоматериалов может быть ориентировано в соответствии с привязкой с использованием устройства 13 вращения. Тогда можно в основном автоматически избегать препятствий на дороге при выполнении операции с использованием набора стрел 12.
Ориентация захвата в положение A, B конца 19 набора стрел 12 может быть выполнена с грузом 16 в захвате 15 или без него. Например, при разгрузке рабочей машины 10 привязка ориентации может быть сделана над грузовым пространством 27 без груза. Соответственно, привязка ориентации может быть выполнена над штабелем 21 с грузом. Затем можно учитывать препятствия 22 вблизи штабеля 21. Также здесь может быть учтено направление вращения устройства 13 вращения. Направление вращения может быть организовано таким образом, что препятствия 22 не будут мешать работе, или направление вращения может быть организовано посредством кратчайшего вращения.
Кроме того, один вариант осуществления способа согласно изобретению таков, что угловое положение устройства 13 вращения и, следовательно, ориентация захвата 15 привязаны таким образом, что, когда в захвате 15 нет груза, вблизи вертикальных стоек 28 для груза захват 15 проходит в грузовое пространство 27 между стойками 28 для груза и из него. Угловое положение такой привязки такое же, как в грузовом пространстве 27 для погрузки деревьев 16, то есть клещи 34 открыты поперек продольного направления грузового пространства 27 и, таким образом, также относительно продольного направления стволов 16 деревьев грузового пространства 27. Это ускоряет перемещение в грузовое пространство 27 и из него с пустым захватом 15 (без деревьев), потому что захват 15 можно перемещать между стойками 28 для груза без подъема захвата 15 над стойками 28 для груза в направлении по высоте.
Согласно еще одному варианту осуществления при определении положения A, B конца 19 набора стрел 12 горизонтальный угол α поворота набора стрел 12 определяется, например, по устройству 18 вращения. Согласно одному варианту осуществления ориентация устройства 14 погрузки лесоматериалов может быть привязана даже только к углу α поворота набора стрел 12.
В дополнение к способу другой целью изобретения является устройство управления работой устройства 14 погрузки лесоматериалов в рабочей машине 10. Устройство, в случае которого ссылка здесь сделана на фиг. 1, содержит набор стрел 12, прикрепленных к рабочей машине 10, устройство 14 погрузки лесоматериалов, прикрепленное к концу 19 набора стрел 12, измерительное средство 17 и средство 24 управления.
Набор стрел 12 содержит рабочие устройства 18, 20, 23 для погрузки деревьев 16 рабочей машиной 10. Рабочие устройства 18, 20, 23 могут использоваться для изменения положения конца 19 набора стрел 12. Рабочие устройства теперь содержат устройство 18 вращения набора стрел 12 на конце набора стрел 12, прикрепленное к рабочей машине 10 между рабочей машиной 10 и набором стрел 12. Его можно использовать для поворота набора стрел 12 по горизонтали. Кроме того, рабочие устройства включают в себя, уже известные рабочие устройства 20, 23, прикрепленные между стрелами с помощью шарниров, такие как, например, гидравлические цилиндры. Их можно использовать для изменения положения конца 19 набора стрел 12 по горизонтали и вертикали. В наборе стрел 12 может быть телескопическая часть, работающая от рабочего устройства (например, на стреле 12'). Это также позволяет изменять положение конца 19 набора стрел 12 по горизонтали и вертикали. По существу, изобретение может быть реализовано с использованием набора стрел 12, который соответствует предшествующему уровню техники.
Устройство 14 погрузки лесоматериалов прикреплено к концу набора стрел 12 с помощью устройства 13 вращения. Посредством устройства 13 вращения может быть достигнута требуемая ориентация для работы устройства 14 погрузки лесоматериалов. Затем устройство 13 вращения вращает устройство 14 погрузки лесоматериалов в горизонтальном направлении. Устройство 13 вращения также может иметь гидравлическое управление.
Кроме того, устройство также содержит измерительное средство 17 для определения положения A, B конца 19 набора стрел 12 и ориентации устройства 14 погрузки лесоматериалов относительно рабочей машины 10. Измерительное средство 17 также может представлять собой, например, измерительное средство, уже известное в предшествующем уровне техники и, возможно, уже устанавливаемое на рабочей машине 10, с помощью которого изобретение может быть реализовано в случае измерительного средства. Наборы стрел 12 рабочих машин, таких как, например, лесозаготовительные машины, могут содержать измерительное средство положения, состояния движения и/или ориентации набора стрел 12.
Пожалуй, самым обычным способом является установка измерительного средства, измеряющего угол поворота при поворотах стрелы. Одну часть датчика (такую как корпус) тогда по существу жестко прикрепляют к одной части стрелы, и, соответственно, другую часть (например, стержень датчика или измерительный элемент) прикрепляют к другой части стрелы. Датчик угла поворота предпочтительно может представлять собой датчик абсолютного значения в варианте осуществления и конструкции или, с другой стороны, альтернативно датчик неабсолютного значения. Датчик абсолютного значения знает свое положение в любой точке области движения, при этом нет необходимости приводить стрелу в нулевую точку. Датчик неабсолютного значения требует определения нулевой точки. В конструкции датчиком угла поворота может быть, например, потенциометр, оптический или другой тип резольвера или, например, индуктивный датчик или датчик, основанный на явлении Холла. Чтобы улучшить разрешение, движение стрелы может, если необходимо, передаваться на датчик, например, с помощью зубчатой передачи, так что в конкретной области движения создается больше измерений.
Внешняя стрела, то есть так называемый удлинитель складной стрелы, то есть ее телескопическое удлинение, движется линейно в продольном направлении складной стрелы. Для измерения положения удлинения может быть использован датчик положения, установленный с соединением, например, с линейным рабочим устройством, таким как, предпочтительно, гидравлический цилиндр. Таким датчиком может быть, например, так называемое устройство магнитострикционного датчика, которое состоит из измерительного стержня и магнитного кольца. Линейное движение также может быть измерено с использованием, например, линейного потенциометра или, альтернативно, с помощью датчика, измеряющего изменение/вращательное движение угла, когда линейное движение сначала преобразуется во вращательное движение.
Для определения углового положения можно интегрировать датчик угла поворота в устройство 13 вращения, то есть вращатель, например, путем установки на часть внутри ротора и вращения относительно зубчатой шестерни скобы, и датчика для считывания этой зубчатой шестерни, такого как, например, индуктивный датчик, который обнаруживает зубчатое зацепление указанной зубчатой шестерни при вращении вращателя.
В указанных выше случаях измерения также можно проводить, как уже известно, с использованием различных блоков и устройств измерения инерции, таких как различные MEMS-датчики, в которых предпочтительно может быть сконструирован инклинометр и/или гироскоп. В блоке измерения инерции инклинометр обнаруживает ускоряющие силы, включая силу тяжести земли, по меньшей мере относительно одной, предпочтительно трех осей, перпендикулярных друг другу. Такое устройство инклинометра очень точно определяет его мгновенное угловое положение относительно земного притяжения. Кроме того, гироскопическое средство блока измерения инерции определяет данные угловой скорости и углового ускорения движения/вращения. Такое устройство гироскопа позволяет определять состояние движения объекта, и эти данные могут быть использованы при определении углового положения и, таким образом, также для управления устройством вращения.
Кроме того, если погрузчик форвардера установлен на передней тележке 35, то есть на другой тележке, чем с грузовым пространством 27, то необходимо также определить угловое положение или угловое положение шасси между тележками машины 35, 36. т.е. угол, на который поворачивается шарнир управления шасси машины. Затем можно определить положение конца набора стрел, расположенных на передней тележке, относительно грузового пространства, расположенного на задней тележке.
Кроме того, устройство также содержит средство 24 управления для привязки ориентации устройства 14 погрузки лесоматериалов, выполненного с использованием устройства 13 вращения, на основе операции, выполняемой с использованием набора стрел 12, и ориентации устройства 14 погрузки лесоматериалов с использованием устройства 13 вращения согласно привязке. Средство 24 управления может включать в себя систему 24.1 управления и компьютер 24.2. Системой 24.1 управления можно управлять через пользовательский интерфейс, например, за счет действия водителя рабочей машины 10.
В устройстве средство 24 управления выполнено так, чтобы привязывать ориентацию устройства 14 погрузки лесоматериалов к положению конца 19 набора стрел 12. Положение конца 19 набора стрел 12 и ориентация устройства 14 погрузки лесоматериалов расположены так, что их определяет измерительное средство 17 при выполнении работы. Средство 24 управления расположено так, чтобы ориентировать устройство 14 погрузки лесоматериалов с использованием устройства 13 вращения на основе определенного положения конца 19 набора стрел 12 в соответствии с указанной привязкой.
Средство 24 управления и подключенные к ним средства 17 измерения выполнены с возможностью осуществления одного или нескольких этапов и/или операций в соответствии с описанным выше способом реализации изобретения.
Изобретение описано выше в связи с разгрузкой и погрузкой. Захват 15 содержит клещи 34, выполненные с возможностью открывания и закрывания. Захват 15 ориентируют с использованием устройства 13 вращения так, что по отношению к грузовому пространству 27 (в его области) перемещение клещей 34 захвата 15 при открывании и закрывании происходит в основном перпендикулярно плоскости относительно продольного направления деревьев 16, предназначенных для укладки в грузовое пространство 27. Соответственно, относительно штабеля 21 или кучи перемещение клещей 34 захвата 15 при открывании и закрывании происходит в основном в перпендикулярной плоскости относительно продольного направления деревьев 16, предназначенных для укладки в штабеле 21 или куче. Аналогичным образом, изобретение также может быть применено к работе харвестера. Тогда его можно использовать, например, для валки деревьев и/или для укладки их в штабели. Например, при прореживающей валке деревья могут располагаться настолько плотно на участке, что ориентация харвестера при захвате дерева может быть в основном одинаковой в случае нескольких деревьев, прежде чем ее нужно будет менять, если рабочая машина остается неподвижной. Тогда используя изобретение также можно получить преимущества, поскольку можно использовать ориентацию обрабатывающей головки, сохраненную один раз в памяти 24.3. Затем харвестерную головку поворачивают к дереву, которое нужно свалить.
Согласно одному варианту осуществления изобретения в дополнение к любому из вышеуказанных вариантов осуществления можно создать привязку устройства 13 вращения относительно одного или нескольких положений конца 19 набора стрел 12 без перемещения набора стрел 12 или конца 19 набора стрел 12. Указанную привязку затем выполняют с помощью системы 24.1 управления таким образом, что угловое положение устройства вращения и, следовательно, ориентацию устройства 14 погрузки лесоматериалов привязывают к определенным координатам местоположения конца 19 набора стрел 12 или к области координат, которую определяют по углам поворота/угловым положениям рабочих устройств набора стрел 12. Привязка ориентации устройства 14 погрузки лесоматериалов тогда может быть реализована без использования набора стрел 12. Это имеет то преимущество, что, например, привязка может быть выполнена без использования набора стрел 12, а также то, что привязка может быть выполнена быстрее или перед началом работы.
Кроме того, согласно одному варианту осуществления изобретение может быть применено таким образом, что местоположения или области определяют в грузовом пространстве 27, предпочтительно с использованием сортировочных стоек, для различных типов дерева/типов предметов в способе сортировки товаров. Например, определение местоположения может происходить в соответствии с поднятой вначале пачкой, чтобы в рассматриваемое местоположение загружать предметы того же типа. Системе 24.1 управления сообщают, что, например, это древесное волокно, и оно опускается в грузовое пространство. Это ускоряет работу за счет автоматизации загрузки и сортировки пиломатериалов, ускоряет рабочий процесс и сводит к минимуму ошибки.
Кроме того, можно применять описанные варианты осуществления изобретения с определением при работе харвестера места в конкретном местоположении для типов древесины, подлежащих резке, в дополнение к ориентации углового положения устройства вращения. Тогда, например, местоположение типа предметов в штабеле, согласно первому дереву, остается в памяти 24.3 системы 24.1 управления для работы со следующими деревьями.
Это также может относиться к разрезанию деревьев на фиксированные длины, когда это происходит в штабелях. Тогда харвестерная головка поворачивает ствол, который должен быть разрезан, параллельно штабелю, который может располагаться, например, параллельно машине или, при завершающей валке, в основном под прямыми углами к пути доступа, так что направление деревьев в штабель будет в основном под прямыми углами к пути доступа. Кроме того, направление валки тоже может быть принято во внимание. Верх дерева, подлежащего валке, можно тогда расположить в том же направлении, в котором было повалено предыдущее дерево. Здесь, например, в качестве ориентира может использоваться предыдущая валка. Это также может зависеть от местоположения (например, площади или сектора крана 47). Направление валки дерева также может быть принято во внимание, чтобы, например, дерево не свалилось поверх рабочей машины.
Приведенное выше изобретение описано в качестве примера, в котором ориентация устройства 14 погрузки лесоматериалов для грузового пространства 27, например, по отношению к форвардеру, происходит только по отношению к грузовому пространству 27 (над ним), а для штабеля 21 или кучи только по отношению к штабелю 21 или куче (над ними). Однако специалист в данной области техники поймет, что ориентация также может происходить раньше, особенно когда захват 15 находится без груза. Тогда, например, при погрузке деревьев 16 в форвардер из штабеля 21 захват 15 может быть ориентирован для штабеля 21 уже по отношению к грузовому пространству 27, даже сразу после того, как деревья, загруженные в него, отделились от захвата 15, а не только после того, как захват 15 был расположен над штабелем 21 или кучей. Соответственно, например, при выгрузке деревьев 16 из форвардера в штабель 21 захват 15 может быть ориентирован для грузового пространства 27 уже даже по отношению к штабелю 21, даже сразу после того, как деревья 16, уложенные в штабеле 21, отделились от захвата 15, а не только после того, как захват 15 был расположен над грузовым пространством 27. Кроме того, также могут помочь данные о состоянии захвата 15 (то есть захват открыт). Таким образом, ориентацию устройства 14 погрузки лесоматериалов на основании определения положения при движении конца 19 стрелы 12 можно понимать в контексте изобретения очень широко в случае положения, в котором выполняют ориентацию устройства 14 погрузки лесоматериалов. Однако важно то, что в изобретении нет необходимости в кропотливом вычислении направления движения и/или скорости конца 19 набора стрел 12, на основе которого устройство 14 погрузки лесоматериалов в основном непрерывно ориентируется, но вместо этого управление может быть основано на определенных данных об абсолютном местоположении конца 19 набора стрел 12. Это означает, что программное обеспечение и его исполнение легко реализовать.
Что касается вышеизложенного, в известных захватах или захватах обычно нет определения состояния открывания/закрывания. Тем не менее, это может быть в харвестерных головках или в некоторых других захватах погрузки лесоматериалов. Тем не менее, даже несмотря на то, что нет отдельного датчика, часто с помощью системы 24.1 управления машиной можно, например, оценить состояние захвата 15 и/или иным образом обнаружить, автоматически через сигналы системы 24.1 управления, рабочую ситуацию, этап работы или его промежуточный этап, выполняемый в любое время. Например, этапы разгрузки и загрузки могут быть обнаружены автоматически без отдельного измерения.
Выше в устройстве 13 вращения было показано по меньшей мере два угловых положения - в грузовом пространстве 27 и над штабелем 21. В качестве альтернативы второе угловое положение также может быть повторением последнего углового положения, например, над штабелем 21, если в предыдущем подъеме обнаружен подъем ствола из того же места. Таким образом, программирование ориентации может выполняться даже в реальном времени, то есть обновляться по мере выполнения операции. Водитель также может сохранять точки движения, используя систему 24.1 управления машины. Затем в системе 24.1 управления может быть сформировано ситуативное изображение объекта, в котором водитель устанавливает значения расстояния и высоты в качестве настроек координат операции. Здесь также можно использовать виртуальную реальность или дополненную реальность.
Программирование и автоматизация работы устройства 13 вращения могут быть реализованы с пустым захватом 15 или с деревом 16 в захвате 15. Когда дерево 16 находится в захвате 15, безопасность также может быть принята во внимание, так что дерево можно безопасно вращать, не ударяя, например, кабину 37, машину, грузовое пространство, и, предпочтительно, внешние препятствия 22.
В соответствии с вышесказанным согласно одному варианту осуществления область C (область безопасности) может быть расположена вокруг/рядом с кабиной 37. В зоне влияния области С захват 15 крана 47 выполнен с возможностью поворота деревьев 16 в поперечном направлении, то есть таким образом, чтобы концы деревьев 16 не были направлены на кабину 37. Это уменьшает опасность того, что кран 47 может направить деревья 16 через окно кабины 37 и внутрь нее. Таким образом, в варианте осуществления также ориентация устройства 14 погрузки лесоматериалов, то есть захвата, привязана к положению конца 19 набора стрел 12, которые согласно одному варианту осуществления могут образовывать, например, группу точек в пространстве C' положений (фиг. 2 и 3), такую как, например, пространство положений вокруг кабины 37.
В изобретении также могут использоваться камеры, и, например, с их помощью машинное зрение может быть реализовано различными способами. С помощью машинного зрения можно, например, видеть, какое дерево поворачивается, чтобы оно ничего не ударило. Затем дерево можно поворачивать для грузового пространства и, кроме того, устанавливать в подходящем месте, предпочтительно для достижения равномерной нагрузки или, например, для деления в соответствии с типами деревьев в соответствии с уборкой CTL. Дерево 16 можно поворачивать параллельно штабелю 21 и можно даже направить над штабелем 21. С помощью машинного зрения/камеры также можно идентифицировать пачки деревьев, их местоположение/количество, типы, а также параметры, размер и ориентацию дерева. В результате дерево можно поворачивать по кратчайшему маршруту в правильное угловое положение, обнаруживая препятствия на пути поворота, и поворот останавливают, если на пути есть препятствия. Кроме того, с помощью камеры/машинного зрения стрела также может перемещаться автоматически. Машина может идентифицировать штабель 21, поместить захват 15 в штабель 21, повернуть в правильное угловое положение, захватить дерево, переместить его в грузовое пространство - и начать искать следующее дерево, предпочтительно из самого последнего места. Система 24.1 управления, управляющая форвардером или другой машиной погрузки лесоматериалов, также может автоматически определять различные этапы работы, так что ориентация рабочей машины может быть привязана к ним.
Кроме того, одной целью изобретения является лесозаготовительная машина 100, которая содержит вышеуказанное устройство или которая предназначена для реализации одного или нескольких этапов и/или операций в соответствии с описанным выше способом.
Изобретение также относится к компьютерному программному продукту для управления работой устройства 14 погрузки лесоматериалов в рабочей машине 10. Продукт содержит средство программного кода, хранящееся на носителе/устройстве хранения данных, читаемое компьютером 24.2, причем средство программного кода выполнено с возможностью выполнения любого из всех этапов согласно описанному выше способу, при запуске программы на компьютере 24.2. Кроме того, изобретение также относится к устройству, которое содержит блок памяти для хранения программного кода и процессор для выполнения программного кода. При работе устройство выполняет, по меньшей мере, один из этапов в соответствии с описанным выше способом. В данном случае устройство можно понимать как компьютер 24.2.
Следует понимать, что вышеприведенное описание и прилагаемые фигуры предназначены только для иллюстрации настоящего изобретения. Таким образом, изобретение не ограничено только вариантами осуществления, описанными выше или определенными в формуле изобретения, вместо этого специалисту в данной области будут очевидны многие различные варианты и адаптации изобретения, которые возможны в рамках идеи изобретения, определенной в прилагаемой формуле изобретения.
Реферат
Группаизобретений относится к лесоперерабатывающей промышленности, в частности к управлению работой устройства погрузки лесоматериалов в рабочей машине. Средство управления выполнено с возможностью привязки ориентации устройства погрузки лесоматериалов к положению конца набора стрел. Положение конца набора стрел и ориентация устройства погрузки лесоматериалов выполнены с возможностью определения измеряющим средством при выполнении работы. Средство управления выполнено с возможностью ориентации устройства погрузки лесоматериалов с помощью устройства вращения на основе определенного положения конца набора стрел в соответствии с указанной привязкой. Повышается эффективность работы оператора рабочей машины. 4 н. и 11 з.п. ф-лы, 8 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ управления источником мощности машины, используемой в лесном хозяйстве
Система и способ для массовой валки деревьев
Комментарии