Устройство и способ для прецизионного переноса слоев атомарно тонких материалов любой площади на планарные подложки - RU2742761C1
Код документа: RU2742761C1
Чертежи
Описание
Изобретение относится к области прецизионного манипулирования и может быть использовано для переноса слоев атомарно тонких материалов, таких как графен, на планарные подложки любого типа с достаточной адгезией, в том числе для создания Ван-дер-Ваальсовых гетероструктур и гибридных устройств с функциональным слоем из атомарно тонких материалов и Ван-дер-Ваальсовых гетероструктур.
Известно устройство и способ переноса слоев графена большой площади (порядка 0,1 м2) на гибкие подложки методом проката между цилиндрическими поверхностями (US Patent US 8916057 B2, МПК В32В 43/006, дата приоритета 16.10.2010, дата публикации 23.12.2014). Устройство представляет собой два близко расположенных цилиндра, в зазоре между которыми находится несущий полимерный слой с графеном вплотную прижатый к слою материала, на который графен переносится. Цилиндры разогреваются до температуры 120°С и прокатываются со скоростью 150-200 мм/мин, при этом за счет сил адгезии графен отделяется от первой поверхности и переносится на вторую. Недостатками данного способа являются отсутствие возможности позиционирования слоя графена над определенными участками подложки и ограниченность только гибкими материалами, на которые слой графена может быть перенесен.
Известен способ переноса слоев атомарно тонких материалов любой площади на подложки различной геометрии при помощи сил поверхностного натяжения (G.F. Schneider et al., Nano Lett., 2010, 10, 1912-1916). В данном способе слой атомарно тонкого материала с нанесенной на него пленкой гидрофобного полимера удерживается на поверхности воды за счет сил поверхностного натяжения, а подложка, на которую переносится атомарно тонкий материал погружается в воду. При уменьшении уровня воды слой атомарно тонкого материала осаждается на подложку, затем полимерная пленка удаляется растворением в органическом растворителе. Для позиционирования слоя атомарно тонкого материала над подложкой может использоваться игла, прикрепленная к манипулятору. Недостатками данного способа являются непланарность перенесенного слоя атомарно тонкого материала, вызванная формированием нежелательных складок, а также его неконтролируемое допирование молекулами воды, захваченными на границе подложка - атомарно тонкий материал. Кроме этого, данный способ ограничен водостойкими материалами и малой точностью позиционирования.
Известно устройство и способ создания Ван-дер-Ваальсовых гетероструктур средней площади (25 см2) в вакууме (K. Kang et al., Nature, 2017, 550, 229-233). Устройство состоит из герметичной вакуумной камеры, внутри которой расположены одноосный манипулятор и неподвижный столик с нагревательным элементом. Подложка с нижним слоем атомарно тонкого материала закрепляется на разогретом до 150°С столике и с помощью вертикального движения манипулятора, на котором установлен держатель со вторым слоем атомарно тонкого материала, слои приводятся в контакт. После подъема верхнего держателя нижний слой оказывается отделен от подложки и перенесен на верхний слой. Слои удерживаются вместе за счет сил Ван-дер-Ваальса. Процесс может быть повторен для формирования Ван-дер-Ваальсовой гетероструктуры с необходимым количеством слоев. Данная техника позволяет минимизировать нежелательное допирование и получить чистые межслоевые границы. Недостатком данного технического решения является отсутствие какого-либо взаимного позиционирования слоев и контроля за движением фронта соприкосновения слоя атомарно тонкого материала и подложки.
Известно устройство и способ локального прецизионного переноса слоев атомарно тонких материалов микроскопического размера (от 1 до 100 мкм) (US Patent US 20190070840 A1 МПК В32В 37/025, дата приоритета 04.09.2018, дата публикации 07.03.2019). Устройство, состоящее из подвижного нагреваемого столика, двухосного манипулятора и одноосного вертикального манипулятора с зондом, помещается под объектив прямого микроскопа, что обеспечивает прецизионность способа. Подложка закрепляется на столике, а полимерный штамп, поддерживающий атомарно тонкий материал, устанавливается на двухосном манипуляторе. Способ состоит в переносе небольших участков атомарно тонких материалов на подложку посредством локального продавливания полимерного штампа зондом над областью подложки, куда слой должен быть перенесен. Недостатками данного метода являются ограниченность площади переносимых слоев и необходимость использования дорогостоящих объективов с большим рабочим расстоянием (не менее 10 мм), достаточным для размещения зонда и полимерного штампа между объективом и подложкой. Еще одним недостатком, помимо высокой стоимости таких объективов, является их маленькая числовая апертура, накладывающая ограничение на оптическое разрешение устройства и прецизионность метода.
Известно устройство и способ его применения для прецизионного переноса слоев атомарно тонких материалов на планарные подложки и создания Ван-дер-Ваальсовых гетероструктур (A. Castellanos-Gomez et al., 2D Materials 2014, 1, 011002, HQ Graphene transfer system brochure: http://www.hqgraphene.com/TransferSystem.php), выбранные в качестве прототипа. Устройство-прототип состоит из подвижного столика с нагревательным элементом для размещения подложки и трехосного манипулятора с держателем для закрепления прозрачной пластины, содержащей полимерный штамп со слоем атомарно тонкого материала. При этом, столик установлен под объективом прямого микроскопа, а держатель манипулятора расположен между объективом и столиком с возможностью визуализации подложки через прозрачную пластину с полимерным штампом, содержащим слой атомарно тонкого материала. Основными недостатками данного устройства-прототипа являются геометрия держателя, ограничивающая размер переносимого слоя атомарно тонкого материала, малая маневренность манипулятора, обусловленная его расположением между объективом и столиком, а также высокая стоимость, связанная с необходимостью использования дорогостоящих объективов с большим рабочим расстоянием (не менее 5 мм).
Способ-прототип заключается в следующем. Планарную подложку закрепляют на столике, разогретом до 40-200°С (значение температуры зависит от характера подложки и материала полимерного штампа), а прозрачную пластину с полимерным штампом, содержащим слой переносимого атомарно тонкого материала, закрепляют на держателе манипулятора. Слой атомарно тонкого материала позиционируют над определенным участком подложки посредством последовательного горизонтального движения манипулятора и столика и приводят в контакт с подложкой с помощью вертикального движения манипулятора вниз. При этом процесс позиционирования слоя над подложкой визуализируется через объектив микроскопа, а точность позиционирования ограничена оптическим разрешением объектива. Затем полимерный штамп отделяют от подложки вертикальным движением манипулятора вверх, а слой атомарно тонкого материала остается на подложке. Данный способ позволяет прецизионно переносить слои атомарно тонких материалов размером от 1 мкм до 1 см. Основными недостатками данного способа-прототипа являются малый размер переносимого слоя атомарно тонкого материала, ограниченный геометрией манипулятора, а также пространственная точность позиционирования (порядка 1 мкм), ограниченная оптическим разрешением объектива ввиду его маленькой числовой апертуры (порядка 0.5), обусловленной большим рабочим расстоянием (порядка 5 мм), необходимым для размещения манипулятора с держателем содержащим слой. Кроме этого, в данном способе-прототипе ввиду ограниченной маневренности манипулятора невозможно задавать и контролировать направление движения фронта соприкосновения слоя и подложки, что критично при переносе на наноструктурированные подложки с нетривиальной топологией.
Решается задача расширения диапазона размеров слоев атомарно тонких материалов, переносимых на планарные подложки совместно с повышением точности взаимного позиционирования слоя и подложки и улучшением контролируемости процесса переноса путем регулирования направления движения фронта соприкосновения слоя и подложки.
Сущность изобретения заключается в интегрировании трехосного манипулятора, содержащего нагреваемый держатель диаметром не менее 3 см и снабженного тремя поступательными и тремя вращательными степенями свободы, в столик инвертированного оптического микроскопа, оснащенного интерферометром для субмикрометрового измерения расстояния и угла между подложкой и слоем атомарно тонкого материала. При этом манипулятор и объектив микроскопа располагаются по разные стороны от столика. Таким образом, в инвертированной геометрии решается проблема маневренности манипулятора и пространственного ограничения размера переносимого слоя атомарно тонкого материала, а также увеличивается оптическое разрешение системы за счет возможности применения объективов с маленьким рабочим расстоянием (порядка 1 мм) и большой числовой апертурой (порядка 0.9).
Сущность способа переноса слоев атомарно тонких материалов в инвертированной геометрии заключается в том, что прозрачная пластина с полимерным штампом, содержащим слой атомарно тонкого материала, устанавливается в подвижный столик инвертированного микроскопа, а подложка, на которую слой атомарно тонкого материала переносится, закрепляется на держателе манипулятора. После этого подложка позиционируется над определенным участком слоя посредством горизонтального движения манипулятора относительно столика. Затем полимерный шатмп, содержащий слой атомарно тонкого материала и подложка приводятся в контакт вертикальным движением манипулятора относительно столика вниз. То есть, в отличие от прототипа, в предлагаемом способе для достижения контакта слоя и подложки последняя передвигается по вертикали, а слой атомарно тонкого материала остается неподвижным. Перед контактом регулируется угол наклона подложки относительно слоя посредством вращения держателя вокруг двух горизонтальных осей, таким образом задается направление движения фронта соприкосновения слоя и подложки, что нехарактерно для прототипа. Затем подложка и полимерный штамп отделяются друг от друга движением манипулятора вверх и слой атомарно тонкого материала переносится с полимерного штампа на подложку. При этом процесс горизонтального позиционирования и вертикального сближения визуализируется с помощью высокоапертурного объектива микроскопа с числовой апертурой не менее 0.9, что повышает прецизионность предлагаемого метода по сравнению с прототипом в два и более раз.
В основе изобретения лежит инвертированная геометрия микроскопа, позволяющая интегрирование трехосного манипулятора с поступательными и вращательными степенями свободы и содержащего нагреваемый держатель диаметром не менее 3 см в подвижный столик микроскопа, который содержит тонкую прозрачную пластину диаметром не менее 10 см. За счет инвертированной геометрии микроскопа объектив располагается под столиком микроскопа, а манипулятор устанавливается непосредственно на столике и его размер и амплитуда движения не ограничиваются рабочим расстоянием объектива. Такое расположение играет ключевую роль в оснащении манипулятора как поступательными, так и вращательными степенями свободы, и держателем подложки большого размера, что нехарактерно для прототипа. Поступательные степени свободы манипулятора обеспечивают трансляционное взаимное позиционирование держателя и столика в трех направлениях, а также контроль скорости их соединения за счет вертикального движения манипулятора. Дополнительные вращательные степени свободы манипулятора позволяют задавать азимутальный угол между держателем и столиком, обеспечивая их горизонтальную взаимную ориентацию, а также изменять угол наклона между плоскостями держателя и столика и тем самым регулировать направление движения фронта их соприкосновения. Большая площадь держателя и пластины, установленной в столике позволяют переносить слои атомарно тонких материалов широкого диапазона размеров (от 1 мкм до 10 см и более), на подложки технологически релевантного размера (порядка 10 см), что выгодно отличает предлагаемое изобретение от устройства-прототипа. Кроме этого, вышеописанное взаимное расположение частей устройства не требует объектива с большим рабочим расстоянием и позволяет использовать высокоапертурные объективы (с числовой апертурой порядка 0.9 и более), которые характеризуются высоким оптическим разрешением и рабочим расстоянием порядка 1 мм. Поскольку точность позиционирования ограничена оптическим разрешением объектива, то таким образом обеспечивается повышение прецизионности устройства с 1 мкм для прототипа до не хуже, чем 500 нм для предлагаемого изобретения. При этом зазор между объективом и держателем в процессе позиционирования достигает 1 мм, а между держателем и поверхностью столика нескольких сотен микрон. Поддержание микроскопического зазора в отсутствие взаимного касания требует обеспечения параллельности плоскостей держателя и столика, которое достигается за счет измерения расстояния с субмикронной точностью. Для этого оптический путь микроскопа оснащен интерферометром Майкельсоновского типа, состоящим из источника когерентного монохроматического излучения с длиной волны 532 нм, полупрозрачным делителем пучка и системой откидных зеркал, позволяющих получать интерференционную картину на камере микроскопа. Таким образом, инвертированный микроскоп, оснащенный дополнительными оптическими элементами в совокупности с конструкцией манипулятора и держателя подложки обеспечивают уровень техники, необходимый для достижения заявленного технического результата.
В основе предлагаемого способа переноса слоев атомарно тонких материалов на планарные подложки лежит прецизионное взаимное позиционирование подложки, закрепленной на держателе манипулятора и слоя, нанесенного на полимерный штамп, располагающийся на прозрачной пластине в столике микроскопа. Для достижения прецизионного позиционирования слой атомарно тонкого материала наносят на полимерный штамп толщиной 100-150 мкм, прикрепленный к стеклянной или кварцевой пластине диаметром порядка 10 см и толщиной 400-500 мкм, устанавлеваемой в столик микроскопа. Предпочтительными материалами полимерного штампа являются полидиметилсилоксан (ПДМС), полиметилметакрилат (ПММА), полипропиленкарбонат (ППК) и поликарбонат (ПК), в зависимости от характера переносимого атомарно тонкого материала и его адгезии к поверхности подложки. Подложку, на которую слой переносят, закрепляют на держателе, разогретом до 40-200°С, в зависимости от материала подложки и штампа, температуру выбирают близкой к температуре стеклования полимера, если адгезия между слоем и подложкой удовлетворительная, или близкой к температуре плавления полимера, если адгезия слоя и подложки слабая. При этом области слоя и подложки визуализируют с помощью объектива микроскопа. В отличие от прототипа, в предлагаемом изобретении при визуализации области интереса столик со встроенным манипулятором содержащие слой атомарно тонкого материала и подложку соответственно, передвигаются относительно объектива как единое целое, что позволяет проводить позиционирование по нескольким областям перекрытия подложки и слоя. На начальном этапе позиционирования используют объектив с небольшими увеличением и числовой апертурой, но значительным рабочим расстоянием (5х-20х, 0.1-0.5, 10-5 мм соответственно), не требующими прецизионного контроля зазора между подложкой и слоем во избежание нежелательного контакта. На финальном этапе позиционирования для достижения точности позиционирования не хуже 500 нм необходимо использование объектива с числовой апертурой не менее 0.9 и рабочим расстоянием порядка 1 мм. При этом зазор между слоем атомарно тонкого материала и подложкой составляет 350-500 мкм. Для позиционирования подложки диаметром 10 см над полимерным штампом с субмилиметровым зазором без касания угол между ними должен составлять не более 2 градусов. Необходимый уровень контроля зазора и угла достигается за счет интерферометрического измерения расстояния между слоем атомарно тонкого материала и подложки, вычисления и корректировки угла между ними. Для субмикронного измерения расстояния между подложкой и слоем используется картина интерферометрических полос равного наклона в виде концентрических колец, необходимым требованием формирования которой является строгая параллельность плоскостей подложки и прозрачной пластины. Если вместо концентрических кругов формируется интерференционная картина в виде параллельных полос, то существует нежелательный угол наклона между подложкой и слоем, который компенсируют вращением держателя вокруг горизонтальных осей до получения концентрических кругов, и сближение слоя и подложки продолжают. После горизонтального позиционирования подложки над слоем атомарно тонкого материала и непосредственно перед приведением их в контакт задают малый угол (в пределах 1 градуса) между плоскостями подложки и слоя, который обуславливает изменение характера интерференционной картины с концентрических кругов на параллельные полосы (полосы равной ширины), которые позволяют вычислить угол между слоем и подложкой по формуле:
где θ - угол наклона подложки относительно пластины в радианах, содержащей слой атомарно тонкого материала, λ - длина волны когерентного света, Δd - расстояние между ближайшими полосами равной интенсивности. При этом направление интерференционных полос характеризует и направление наклона подложки относительно слоя, и служит индикатором направления движения фронта соприкосновения слоя и подложки еще до приведения их в контакт. Далее разогретая полностью спозиционированная в трех направлениях подложка приводится в контакт с полимерным штампом строго вертикальным движением манипулятора вниз. Процесс визуализируют объективом, контролируя различные участки пластины, передвигая столик и манипулятор как одно целое относительно объектива микроскопа. После достижения полного контакта подложку и полимерный штамп разъединяют и слой атомарно тонкого материала оказывается перенесен на подложку. Такая система может быть полностью автоматизирована за счет применения пьезоэлектрических актуаторов для поступательных и вращательных степеней свободы манипулятора, а также обладает компактностью прототипа и может быть помещена в атмосферный изолятор.
Сущность предлагаемого изобретения поясняется фигурами, где:
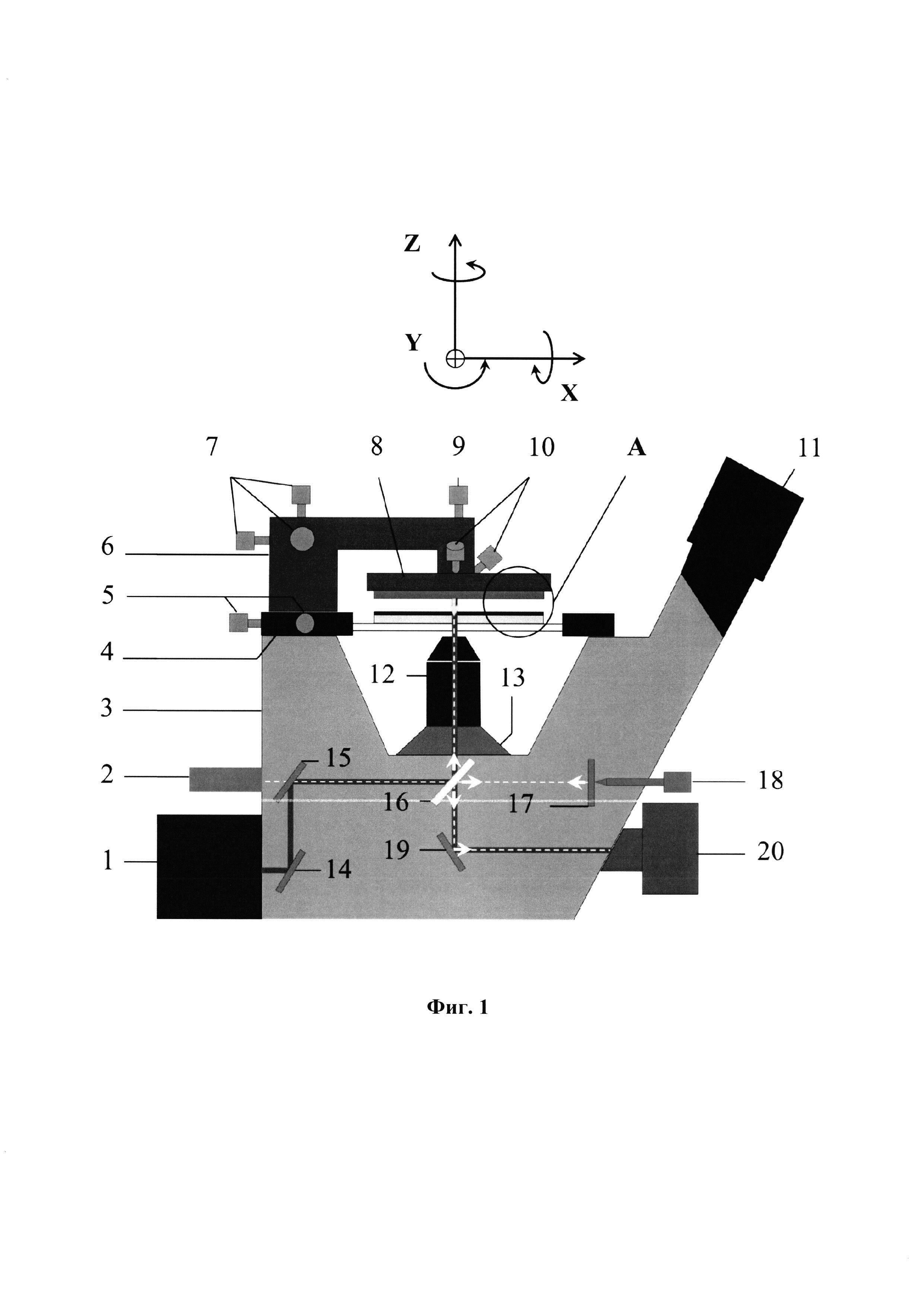
на фиг. 1 изображен схематичный вид сбоку устройства для переноса слоев атомарно тонких материалов в инвертированной геометрии.
1 - лампа, 2 - источник монохроматического когерентного излучения (лазер), 3 - корпус инвертированного микроскопа, 4 - столик микроскопа, 5 - винты либо актуаторы, двигающие столик микроскопа по осям X, Y относительно корпуса 3, 6 - манипулятор, 7 - винты либо актуаторы для поступательного передвижения манипулятора по осям X, Y, Z относительно столика 4, 8 - держатель подложки, 9 - регулятор азимутального угла поворота держателя 8 вокруг оси Z, 10 - регуляторы углов наклона и вращения держателя 8 вокруг осей X, Y, А - участок области позиционирования подложки над слоем атомарно тонкого материала (описывается на фиг. 2), 11 - окуляры, 12 - объектив, 13 - турель объективов, 14 - зеркало, 15 - откидное зеркало, 16 - полупрозрачное зеркало, 17 - откидное подвижное зеркало, 18 - микрометрический винт, 19 - зеркало, 20 - камера;
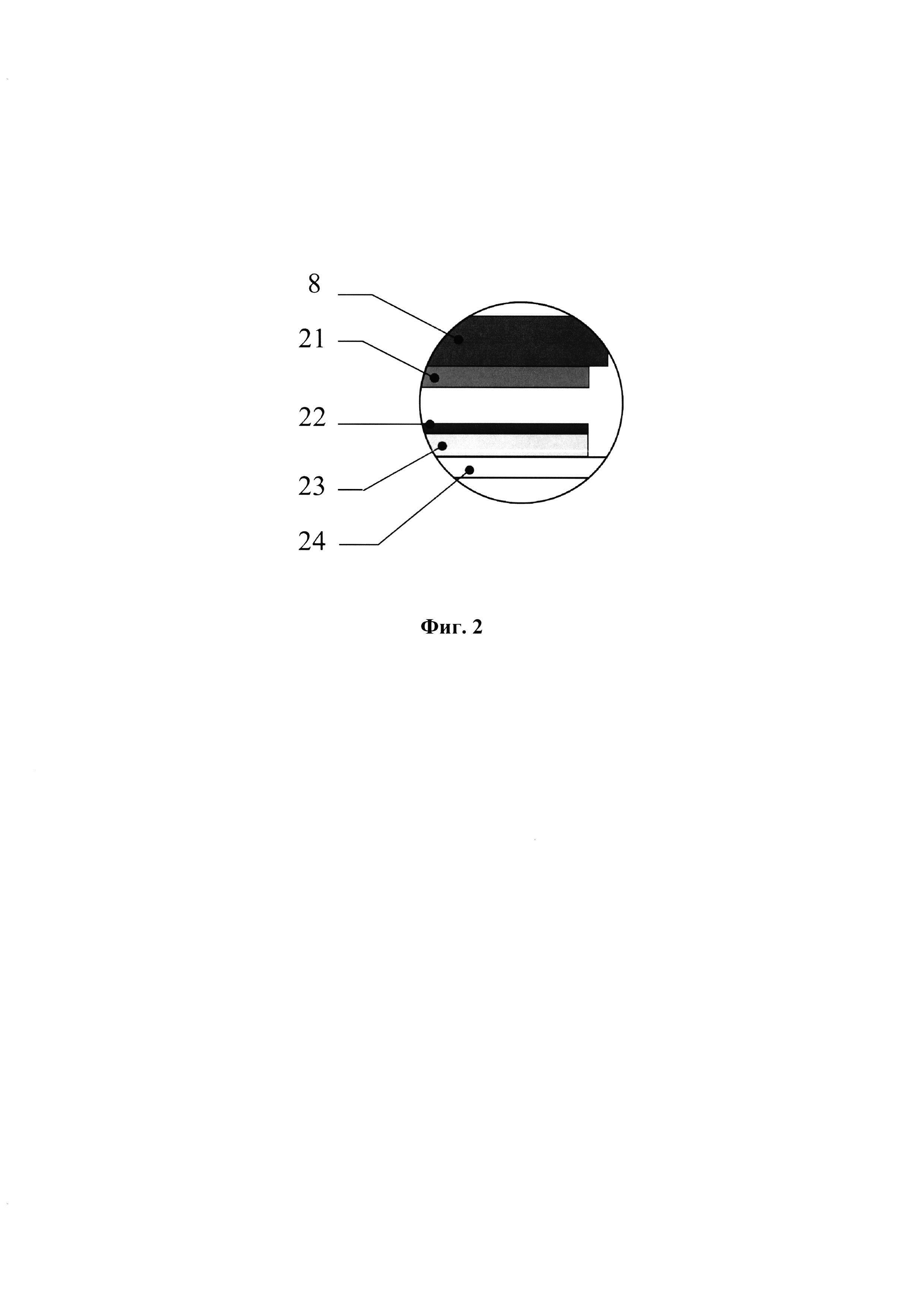
на фиг. 2 изображен вид сбоку участка области позиционирования подложки над слоем атомарно тонкого материала (отмеченной буквой А на фиг. 1). 8 - держатель подложки, 21 - подложка, 22 - слой атомарно тонкого материала, 23 - полимерный штамп, 24 - прозрачная пластина;
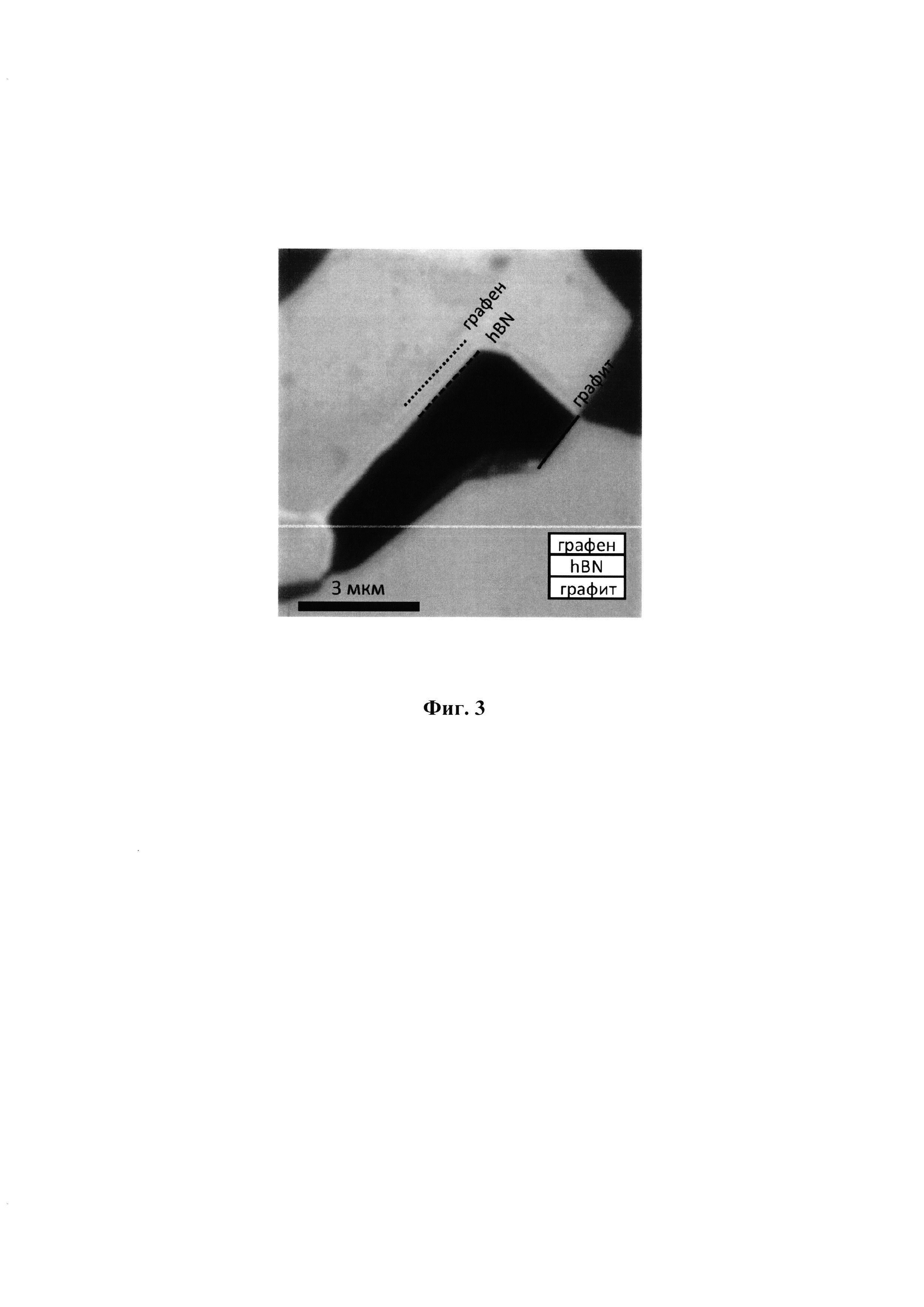
на фиг. 3 изображена Ван-дер-Ваальсова гетероструктура, состоящая из слоев графена и графита, разделенных слоем нитрида бора (hBN). При этом края всех слоев выровнены по углу, а края графена и нитрида бора разнесены на расстояние не более 500 нм;
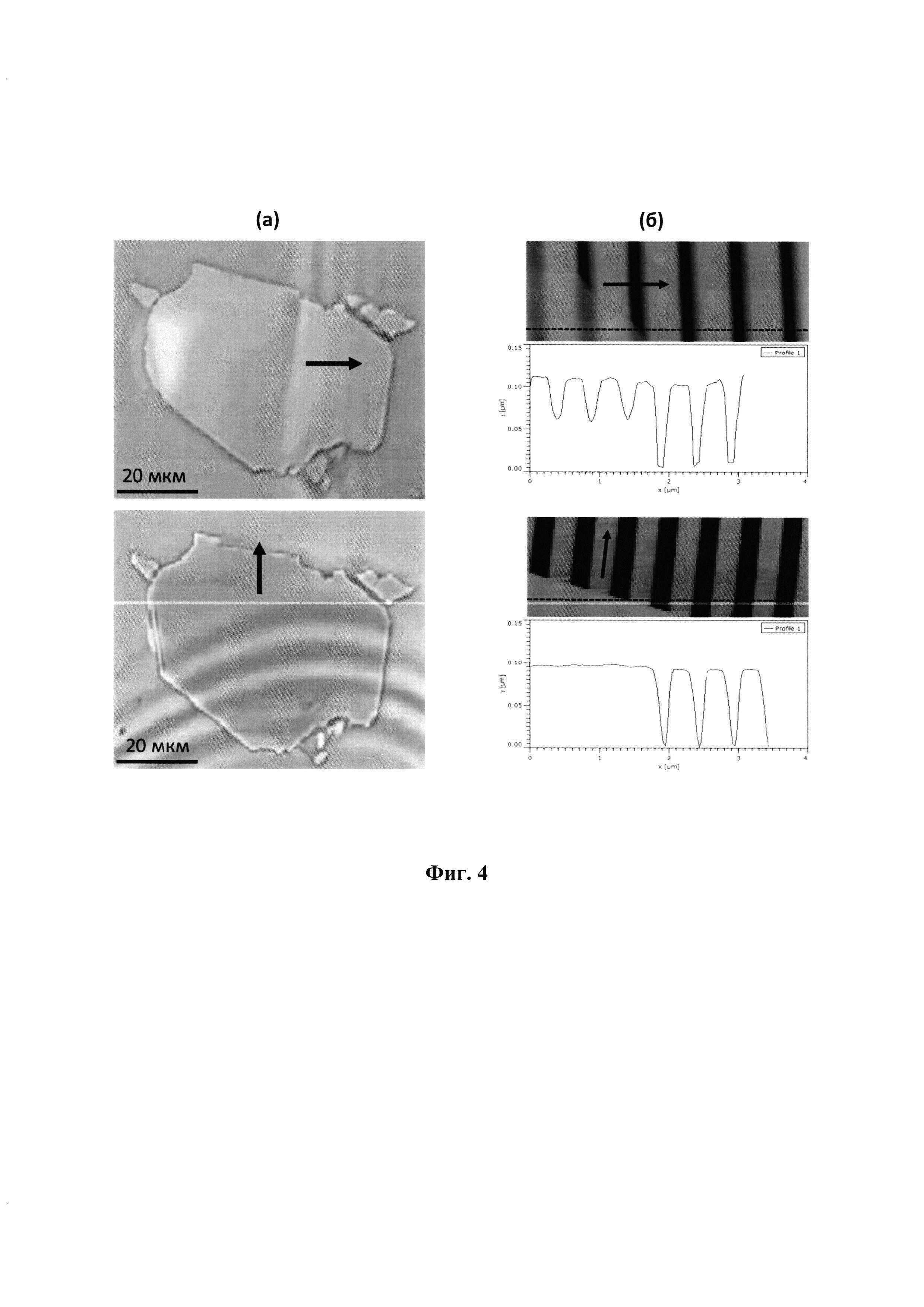
на фиг. 4 изображен процесс переноса слоя атомарно тонкого материала с контролем направления переноса и зависимость топографии гибридной структуры от направления переноса слоя на наноструктурированную подложку: (а) оптические изображения слоя атомарно тонкого материала, переносимого на планарную гладкую подложку, интерференционные полосы видны при субмикронном зазоре между подложкой и полимерным штампом и позволяют идентифицировать фронт соприкосновения подложки и слоя, стрелки указывают направление движения фронта, контролируемое углом наклона подложки относительно слоя, (б) карты топографии решеток с перенесенными на них слоями атомарно тонких материалов и профили высоты слоя материала, считанные с карт вдоль пунктирной линии, карты получены методом атомно силовой микроскопии, стрелки указывают направление движения фронта при переносе.
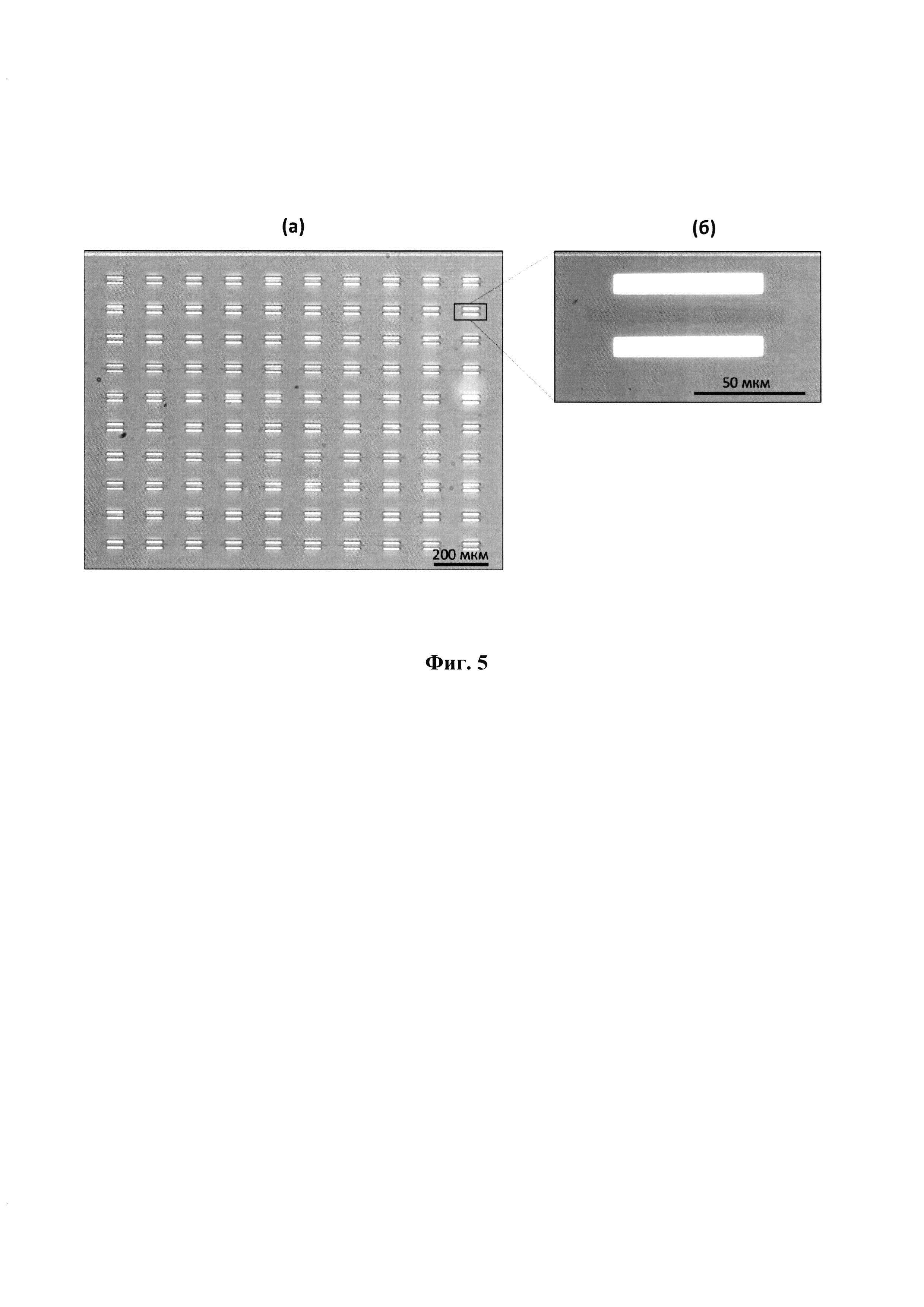
на фиг. 5 изображен массив графеновых микролент, прецизионно перенесенный на подложку с предварительно созданными контактными площадками: (а) оптическое изображение участка подложки с массивом локальных контактов (светлые полосы) и прецизионно перенесенным массивом микроскопических полос из графена (светло-серые полосы), (б) увеличенное изображение элемента массива (а), на котором видна микролента из графена, перенесенная в зазор между контактами.
Устройство для переноса слоев атомарно тонких материалов на планарные подложки представляет собой инвертированный микроскоп 3, содержащий столик 4 подвижный относительно корпуса микроскопа 3, где винты 5 предназначены для передвижения столика 4 вдоль осей X, Y. В столик 4 интегрирован трехосный манипулятор 6, содержащий плоский нагреваемый держатель 8, подвижный относительно столика 4. Винты 7 предназначены для перемещения держателя 8 поступательно вдоль осей X, Y, Z, винт 9 обеспечивает азимутальное вращение держателя 8 (вокруг оси Z), а винты 10 обеспечивают вращательное движение держателя 8 вокруг осей X, Y, при этом центр вращения держателя совпадает с его геометрическим центром. В столике 4 размещена прозрачная пластина 24, содержащая полимерный слой 23, на котором расположен слой атомарно тонкого материала 22, а подложка 21, предназначенная для переноса слоя атомарно тонкого материала прикреплена к нагреваемому держателю 8. Микроскоп 3 содержит лампу непрерывного спектра 1, фиксированное зеркало 14 и откидное зеркало 15 для заведения света лампы 1 в объектив 12, предназначенный для фокусировки света лампы 1 на поверхности слоя атомарно тонкого материала 22 или подложки 21, окуляры 11 и камера 20 предназначенные для визуализации картины поверхности слоя атомарно тонкого материала 22 или подложки 21 в отраженном свете лампы 1. Совместно с лампой 1 установлен лазер 2, полупрозрачное зеркало 16 предназначено для заведения света лампы 1 в объектив 12 и разделения луча лазера 2 на два пучка: опорный и измерительный, откидное подвижное зеркало 17 предназначено для отражения опорного пучка лазера 2, микрометрический винт 18 предназначен для передвижения зеркала 17 вдоль опорного пучка и измерения хода зеркала 17, зеркало 19 установлено для отражения изображения поверхности слоя 22 или подложки 21 или интерференционной картины опорного и измерительного пучка на камеру 20.
Устройство для переноса слоев атомарно тонких материалов на планарные подложки в инвертированной геометрии работает следующим образом. Сначала держатель 8 манипулятора 6, интегрированного в столик 4 инвертированного микроскопа 3, устанавливают строго параллельно пластине 23, размещенной в столике 4, приводя их чистые поверхности в плотный контакт. Затем откидывают зеркало 15, устанавливают зеркало 17 и при включенном лазере 2 наблюдают интерференционную картину из концентрических колец на камере 20. Затем перемещают зеркало 17 с помощью винта 18 вдоль хода луча лазера 2 (показан белой пунктирной линией) до исчезновения интерференционной картины, это положение становится нулевым для отсчета расстояния между держателем 8 и пластиной 23 в столике 4. Держатель отводится от пластины вертикально вверх на расстояние 10-15 мм, которое контролируется микрометрическим винтом 7. Затем к держателю прикрепляется подложка, расстояние до которой также измеряется по ходу зеркала 17 до исчезновения интерференционной картины, при этом значение хода зеркала измеряется винтом 18 с субмикронной точностью. Затем слой атомарно тонкого материала 22 на полимерном носителе 23 крепят на прозрачную пластину 24, а подложку 21, на которую слой переносится, разогревают до 40-200°С держателем 8. При этом, толщина полимерного штампа предварительно измеряется, и его толщина вычитается из значения зазора, полученного в интерферометрическом измерении. Затем устанавливают зеркало 15 и откидывают зеркало 17, и при включенной лампе 1 фокусируют луч белого света (показан непрерывной серой линией) на подложке 21 или на слое 22. Горизонтальную позицию подложки 21 над слоем 22 устанавливают винтами 7 манипулятора 6 (оси X, Y) и винтом 9, регулирующим азимутальный угол поворота плоскости нагревателя (вокруг оси Z) и отслеживают на оптическом изображении, получаемом в отраженном свете лампы 1 посредством объектива 12 и выводимом на окуляры 11 либо камеру 20. При этом на начальном этапе позиционирования, используют объектив 12 с маленьким увеличением и большим полем зрения, затем, вращая турель 13, устанавливают объектив 12 с большим увеличением и числовой апертурой не менее 0.9 для максимальной точности позиционирования. Данный тип объективов обладает рабочим расстоянием порядка 1 мм, и при их использовании следят за величиной зазора между подложкой и слоем, вычисляемым как разность расстояния, полученного при интерферометрическом измерении расстояния до подложки и величины хода вертикального микрометрического винта 7. Перед приведением подложки и полимерного штампа, содержащего слой в контакт, двигают зеркало 17 винтом 18 до исчезновения интерференционной картины, затем держатель 8 поворачивают на малый угол (в пределах 1 градуса) вокруг осей X, Y винтами 10 и наблюдают интерференционную картину в виде параллельных полос, при этом по расстоянию между полосами контролируют угол наклона, а по ориентации полос соответственно ориентацию наклона подложки.
Перенос слоя 22 на подложку 21 производят вертикальным движением манипулятора 6 вниз (по оси Z) с помощью винта 7, которое приводит подложку 21 и полимерный штамп 23, содержащий слой атомарно тонкого материала 22, в контакт и последующим движением вверх, при котором подложка 21 и полимерный штамп 23 разделяются, а слой атомарно тонкого материала 22 остается на подложке 21.
Примеры конкретной реализации способа переноса слоя атомарно тонкого материала на планарные подложки в инвертированной геометрии.
Для создания Ван-дер-Ваальсовой гетероструктуры, изображенной на фиг. 3 и состоящей из слоя графена и слоя графита, разделенных слоем гексагонального нитрида бора (hBN) применяется метод переноса в инвертированной геометрии. При этом слой графита был получен методом механического расщепления объемного кристалла скотчем на кремниевой подложке с 300 нм слоем оксида кремния (Si/SiO2), а слои графена и гексагонального нитрида бора были получены расщеплением соответствующих объемных кристаллов на слои полидиметилсилоксана (ПДМС) толщиной 100 мкм, нанесенного на стандартные десятисантиметровые кварцевые пластины толщиной 500 мкм. После этого подложку, содержащую слой графита прикрепляют к держателю 8, разогретому до 50°С, а кварцевая пластина, содержащая слой нитрида бора устанавливают в столик микроскопа 4. Затем объектив 12 с увеличением 5х и числовой апертурой 0.1 фокусируют на слой нитрида бора, а столик микроскопа передвигают вдоль осей X, Y так, чтобы слой нитрида бора был в центре объектива, после этого объектив фокусируют на подложке 21 и слой графита позиционируют над слоем нитрида бора движением манипулятора вдоль осей X, Y винтами 7. На этом этапе зазор между подложкой и объективом составлял около 10 мм. Затем измеряют расстояние между подложкой и слоем атомарно тонкого материала, и корректируют угол до плоскопараллельного положения подложки над слоем нитрида бора. После этого подложку подводят к слою атомарно тонкого материала на расстояние порядка 500 мкм и применяют объектив с числовой апертурой 0.9. Взаимное расположение слоев нитрида бора и графита корректируют прецизионным движением манипулятора вдоль осей X, Y и поворотом вокруг оси Z. После этого задают малый угол наклона подложки относительно полимерного штампа посредством вращения держателя 8 подложки вокруг осей X, Y винтами 10 и слои графита и нитрида бора приводят в контакт движением подложки вдоль оси Z одним из винтов 7. Затем слои разъединяют, и слой нитрида бора оказывается, перенесен на слой графита за счет достаточного Ван-дер-Ваальсова притяжения между этими материалами. Далее процесс переноса слоя графена на гетероструктуру из графита и нитрида бора повторяют, при этом на стадии взаимного позиционирования края графена и нитрида бора выравнивают по азимутальному углу (точность составила 0.1 градус) и горизонтальному расстоянию (точность 500 нм).
При переносе слоев атомарно тонких материалов на наноструктурированные подложки следует учитывать наличие градиентов механических напряжений, создаваемых фронтом соприкосновения слоя и подложки. Такие градиенты могут влиять на площадь и механический характер контакта слоя атомарно тонкого материала с наноструктурированной поверхностью подложки. Например, степень прогиба слоя атомарно тонкого материала в канавки субмикронной ширины, вытравленные в подложке, зависит от направления фронта соприкосновения слоя с канавками. На фиг. 4 (а) изображен контроль направления движения фронта соприкосновения полимерного штампа, содержащего слой расщепленного атомарно тонкого материала, проводимый посредством прецизионного вращения держателя 8 вокруг осей X, Y. Наблюдаемые интерференционные полосы отличны от возникающих в результате засветки лазером, и формируются в процессе контакта на воздушном клине малого угла между слоем и подложкой, эти полосы позволяют идентифицировать фронт соприкосновения слоя и подложки. На фиг. 4 (б) изображены карты топографии слоев атомарно тонких материалов, перенесенных на канавки с разным направлением движения фронта. Для достижения желаемого характера механического контакта слоя атомарно тонкого материала с подложкой, направление движения фронта соприкосновения контролировалось непосредственно в процессе переноса.
Прецизионный перенос массива микроскопических лент, вытравленных из слоя графена большой площади (50×50 мм) на наноструктурированную поверхность, содержащую пары электродов изображен на фиг. 5. При этом, в процессе горизонтального позиционирования взаимное расположение микролент между электродами итеративно контролировалось, как и в случае Ван-дер-Ваальсовой гетероструктуры, но по нескольким точкам (минимум 3), разнесенным по подложке на максимальное расстояние. Прецизионность такого позиционирования составила 500 нм.
Таким образом, показаны преимущества предлагаемого устройства и способа для прецизионного переноса слоев атомарно тонких материалов площадью до 300 см2 на планарные подложки, обеспечивающего точность позиционирования не хуже 500 нм, и позволяющего контролировать направление движения фронта соприкосновения слоя и подложки. Такой способ является масштабируемым и может быть применен для прецизионного переноса слоев атомарно тонких материалов любой площади.
Реферат
Изобретение относится к области прецизионного манипулирования и может быть использовано для переноса слоев атомарно тонких материалов, таких как графен, на планарные подложки любого типа с достаточной адгезией, в том числе для создания Ван-дер-Ваальсовых гетероструктур и гибридных устройств на их основе. Устройство для переноса слоев 22 атомарно тонких материалов на планарные подложки 21, содержащее трехосный манипулятор 6 с держателем 8 и подвижный столик 4, которые установлены с возможностью перемещения друг относительно друга и интегрированы с оптическим инвертированным микроскопом 3 с апертурой объектива не менее 0,9, при этом манипулятор 6 и объектив 12 микроскопа 3 расположены по разные стороны от столика 4, манипулятор 6 обладает тремя поступательными и тремя вращательными степенями свободы с центром вращения, находящимся в центре держателя 8, держатель 8 снабжен нагревательным элементом, и его диаметр составляет не менее 3 см, а микроскоп 3 снабжен высокоточной системой для измерения расстояния и угла между держателем 8 и столиком 4 в виде интерферометра Майкельсоновского типа. Способ переноса слоев 22 атомарно тонких материалов на планарные подложки 21 заключается в том, что слой 22, нанесенный на прозрачную пластину 24, и подложку 21 прецизионно взаимно позиционируют в горизонтальном направлении, а затем приводят в контакт посредством вертикального сближения, после чего слой 22 и подложку 21 разъединяют, при этом процесс позиционирования и приведения в контакт визуализируют с помощью объектива 12 микроскопа 3, подложку 21 закрепляют на держателе 8 и нагревают, а пластину 24 с нанесенным слоем 22 устанавливают на неподвижный столик 4 инвертированного микроскопа 3 с числовой апертурой объектива не менее 0,9, позиционирование осуществляют путем интерферометрического измерения расстояния между слоем 22 и подложкой 21 и вычисления и корректировки угла между ними посредством поворота держателя 8 с подложкой 21 относительно пластины 24 со слоем 22 за счет вращательных степеней свобод манипулятора 6 до формирования интерференционной картины, соответствующей строгой параллельности плоскостей подложки 21 и прозрачной пластины 24, а контактирование осуществляют перемещением вниз разогретой и полностью позиционированной в трех направлениях на держателе 8 подложки 21. Изобретение позволяет переносить слои атомарно тонких материалов площадью до 300 см2на планарные подложки с точностью не хуже 500 нм и при этом контролировать направление и скорость движения фронта переноса, что критично для наноструктурированных подложек с нетривиальной топографией. 2 н.п. ф-лы, 5 ил.
Комментарии