Способ управления снарядом - RU2021577C1
Код документа: RU2021577C1
Чертежи




Описание
Изобретение относится к управляемым снарядам, содержащим головку самонаведения, выпущенным по целям, а более конкретно к снарядам, выпущенным по целям, обладающим высокой скоростью полета, высокой маневренностью, способностью приближаться к обороняемму объекту либо на предельно малой высоте, либо по траектории крутого пикирования, либо по любой траектории, требующей от снаряда интенсивного маневрирования.
Головка самонаведения при подлете к цели улучшает точность пеленгации и выявляет накопившуюся ошибку наведения. Из-за кратковременности конечного участка траектории с улучшенной пеленгацией цели снаряд должен компенсировать промах интенсивным маневрированием за очень короткое время, оставшееся до встречи.
Решающее значение для прямого попадания снаряда в цель имеет возможность создавать для воздействия на траекторию корректирующее усилие (перегрузку) большого уровня за минимальное время, управлять его длительностью и ориентацией по фазе в зависимости от величины реализовавшегося промаха и его изменяющегося направления и незамедлительно прекращать его воздействие после обнуления промаха.
Известные способы управления снарядом используют для коррекции траектории аэродинамическую силу, создаваемую путем поворота корпуса снаряда на угол атаки относительно потока с помощью управляемых рулевых поверхностей.
Этот способ ограничен по возможности корректировать траекторию замедленностью в создании аэродинамичеспкой силы из-за длительности разворота корпуса снаряда на угол атаки, а уровень корректирующего усилия ограничен величиной предельного угла атаки из условия аэродинамического обтекания, что в целом не позволяет обнулить промах и привести снаряд точно в цель.
Известен способ управления снарядом [1], сочетающий аэродинамическую систему управления, способную создавать большую по уровню боковую перегрузку, но запаздывающую по времени, с меньшим по уровню дополнительным корректирующим усилием, перпендикулярным продольной оси снаряда, включаемым для уменьшения продолжительности переходных процессов при подлете к цели. Дополнительное реактивное корректирующее усилие в процессе воздействия на траекторию непрерывно плавно регулируется по величине и по направлению в радиальной плоскости снаряда пропорционально командам управления, восполняя разницу между требуемым корректирующим усилием и аэродинамической силой, создаваемой снарядом с запаздыванием.
Применение указанного способа ограничивается возможностью создавать на снаряде в приемлемых массе и габаритах быстродействующих корректирующую силу, плавно реагируемую до достаточно большого уровня, что не позволяет осуществить интенсивную коррекцию траекторию снаряда для выбора накопившегося промаха. Из-за указанных ограничений данный способ применим в меньшей по дальности части зоны полета снаряда, где работает маршевый двигатель и обеспечивается высокая аэродинамическая маневренность, но этот способ не эффективен в большей по дальности части зоны пассивного полета снаряда.
Известен способ управления снарядом [2], основанный на измерении угловой скорости линии визирования для назначения корректирующего усилия, воздействии на снаряд корректирующим усилием в плоскости, перпендикулярной оси снаряда, для уменьшения промаха. Недостатками известного способа являются назначение корректирующего усилия по измеренной до пуска угловой скорости линии визирования, которая не соответствует промаху, действительно реализующемуся при подлете снаряда к цели, из-за разнесения по времени момента пуска и момента подлета. Отсутствуют разворот снаряда по крену для ликвидации рассогласования по фазе в радиальной плоскости снаряда между промахом и корректирующим усилием, обнуление корректирующего усилия при обнулении промаха по уточняющейся при полете снаряда информации об истинном промахе по угловой скорости линии визирования. Технический результат достигается введением в известный способ следующих отличителных действий: угловую скорость, используемую для назначения корректирующего усилия измеряют при подлете снаряда к цели на участке ее точной пеленгации головкой самонаведения, воздействуют корректирующим усилием для выбора промаха в течение времени, необходимого для достижения угловой скоростью нулевого значения, при воздействии корректирующим усилием произвоядт разворот снаряда по крену до ликвидации рассогласования по фазе в радиальной плоскости снаряда между промахом и корректирующим усилием после обнуления промаха, что соответствует достижению угловой скоростью линии визирования нулевого значения, производят обнуление корректирующего усилия.
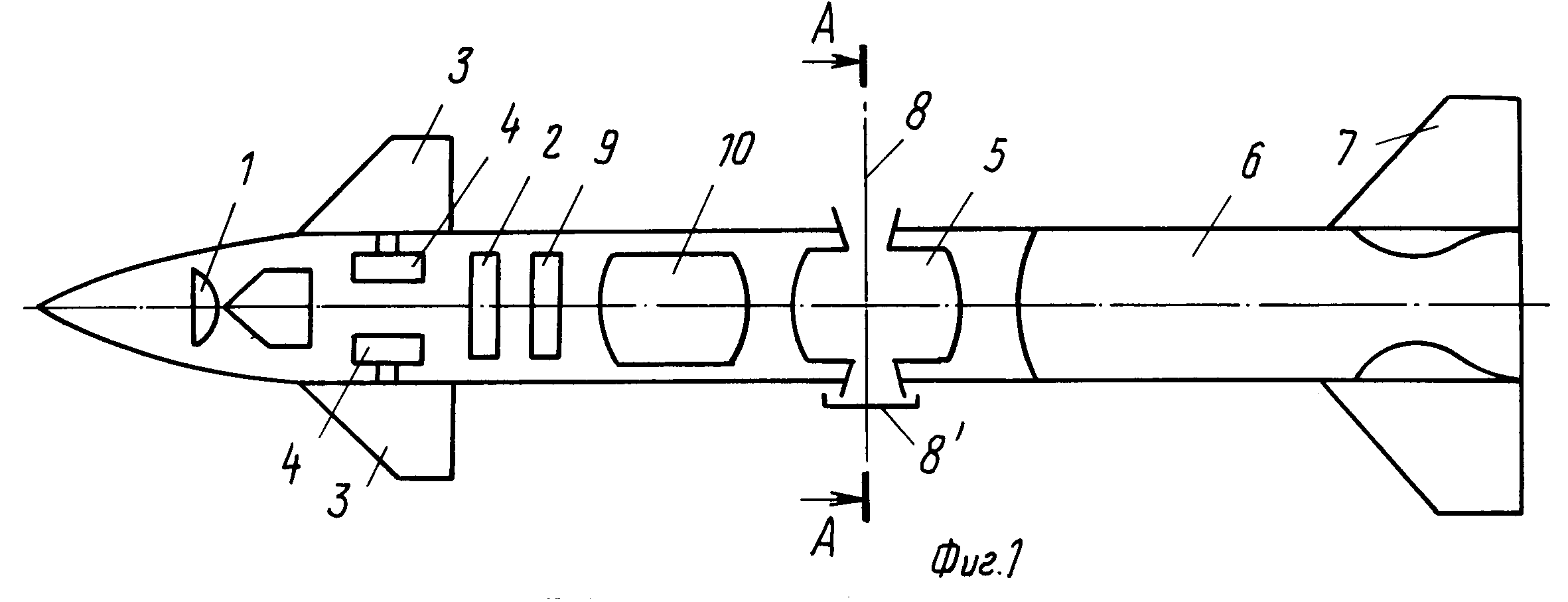
На фиг.1 представлен снаряд, использующий способ форсажного управления в соответствии с изобретением, общий вид; на фиг.2 - иллюстрация траектории полета снаряда, управляемого по предлагаемому способу; на фиг.3 - изменение угловой скорости линии визирования; на фиг.4 - сечение А-А с вскрытыми в момент t4 соплами (8); на фиг.5 - поперечное сечение А-А с вскрытыми в момент t5 радиально противоположными (реверсивными) соплами (8').
Снаряд включает головку самонаведения 1, которая измеряет в полете угловую скорость линии визирования, блок управления 2, аэродинамические рули 3, соединенные с рулевым приводом 4, газогенератор 5, создающий корректирующее усилие для воздействия на траекторию, маршевый двигатель 6, стабилизатор 7, блок приема команд радиокоррекции 9, сопла газогенератора 8, 8', боевую часть 10.
Полет снаряда после пуска при перехвате, например, низколетящей над морской поверхностью цели разделяется на несколько участков (см. фиг.2). Первый участок охватывает выстреливание из пускового устройства и разворот в направлении цели. Второй участок охватывает управляемый полет, когда корректирующее воздействие на траекторию создает аэродинамическая сила в соответствии с командами корабельного радиолокатора сопровождения цели. На этом участке цель с борта снаряда головкой самонаведения не пеленгуется. На втором участке головка самонаведения 1 ориентируется в направлении цели по сигналам целеуказания, вырабатываемым блоком управления 2, и при сближении снаряда с целью производит захват цели на автосопровождение. На третьем участке расстояние между снарядом и целью еще велико, поэтому недостаточные по мощности отраженные от цели сигналы маскируются в фоне переотраженных от морской поверхности мешающих радиосигналов, в результате чего низколетящая цель пеленгуется головкой самонаведения с борта снаряда с большими ошибками (см. фиг. 3). Как результат больших ошибок пеленгации низколетящей цели корабельным радиолокатором и бортовой головкой самонаведения к концу третьего участка полета снаряд имеет накопившийся промах относительно цели. При уменьшении дистанции между снарядом и целью (участок 4) отраженные от цели радиосигналы превышают помехи, переотраженные от морской поверхности, и головка самонаведения снаряда с этого момента точно пеленгует цель. Угловая скорость линии визирования снаряда на этом участке соответствует накопившемуся промаху снаряда относительно цели и возрастает при уменьшении дистанции между снарядом и целью (интервал времени t3, t4, фиг.3).
Включение реактивного корректирующего усилия производят по сопоставлению измеренной угловой скорости линии визирования с величиной порогового уровня включения.
Пороговый уровень включения ωпор.вкл корректирующего усилия вычисляют по соотношению
ωпор,вкл =




т.е. его величина зависит от минимального значения ускорения W, создаваемого корректирующим усилием в пределах диапазона, реализуемого в эксплуатационных условиях, скорости сближения V и коэффициента

В тот момент, когда угловая скорость достигает уровня порога включения (момент t4, фиг.3), включают реактивное корректирующее усилие в плоскости, перпендикулярной продольной оси снаряда, так, чтобы рассогласование по фазе между корректирующим усилием и направлением промаха в радиальной плоскости снаряда было минимальным. Для этого блок управления 2 выбирает те сопла, истечение из которых создает корректирующее усилие, совпадающее по модулю с вычисленным, а по фазе в радиальной плоскости снаряда, ближайшей к направлению промаха, и дает сигнал на включение газогенератора 5 и сброс заглушек с выбранных сопл 8 (см. фиг.4).
Одновременно производят разворот снаряда по крену до ликвидации рассогласования по фазе в радиальной плоскости снаряда между промахом и корректирующим усилием на угол γ (см. фиг.4).
Истекающий из вскрытых сопл пороховой газ создает корректирующее усилие в плоскости, перпендикулярной продольной оси снаряда, в результате чего происходит уменьшение угловой скорости линии визирования (участок 5, интервал времени t4, t5, фиг.3).
Превышение модулем реализованного корректирующего усилия его минимального априорного значения, использованного для вычисления порогового уровня включения, как результат воздействия температуры, неучтенных технологических и эксплуатационных факторов, ошибки измерения угловой скорости линии визирования, повлиявшее на назначение момента включения, приводит к тому, что обнуление промаха и соответственно угловой скорости линии визирования происходит при недолете снаряда до цели (в конце участка 5, момент t5, фиг. 3).
В прототипе несмотря на обнуление промаха корректирующее усилие не обнуляется и продолжает уже излишне искривлять траекторию снаряда, что приводит к появлению противоположного по знаку промаха, т.е. перелету снаряда относительно цели.
Одним из отличий изобретения является регулирование длительности воздействия корректирующего усилия на траекторию в зависимости от величины реализовавшегося в действительности промаха. После обнуления промаха, что соответствует моменту обнуления угловой скорости линии визирования (момент t5, фиг. 3), производят обнуление корректирующего усилия. Для этого блок управления дает сигнал на сброс заглушек с сопел 8' (см. фиг.5), радиально противоположных (реверсивных) сопл, в тот же момент исчезает корректирующее усилие и прекращается воздействие на траекторию в момент, в точности соответствующий нулевому промаху снаряда относительно цели.
В результате упомянутые выше технологические, эксплуатационные и измерительные погрешности, неизбежно приводящие к отклонению траектории снаряда относительно цели, в способе управления по изобретению компенсируются включением реактивного корректирующего усилия по угловой скорости линии визирования, измеренной при подлете снаряда к цели на участке ее точной пеленгации головкой самонаведения, разворотом снаряда по крену до ликвидации рассогласования по фазе в радиальной плоскости снаряда между промахом и корректирующим усилием и регулированием длительности воздействия на траекторию корректирующего усилия с прекращением его действия в момент обнуления промаха.
Последний шестой участок (t5, t6, фиг.3) представляет полет снаряда с обнуленным корректирующим усилием по траектории, точно встречающейся с целью и обеспечивающей в большинстве случаев попадания в нее снаряда непосредственно или с минимальным рассеиванием в пределах радиуса действия боевой части (10).
Реферат
Изобретение позволяет обеспечить преимущественно прямое попадание в цель, относится к снарядам, выпущенным по целям, требующим для перехвата интенсивного маневрирования непосредственно перед точкой встречи на участке точной пеленгации головкой самонаведения. Способ применим для перехвата низколетящих групповых маневрирующих или покрытых помехами целей. Способ форсажного управления основан на измерении угловой скорости линии визирования при подлете к цели на участке ее точной пеленгации головкой самонаведения и воздействии на снаряд реактивным корректирующим усилием в плоскости, перпендикулярной продольной оси снаряда для выбора накопившегося промаха. Реактивное корректирующее усилие включает при подлете снаряда к цели по достижении угловой скоростью линии визирования порогового уровня, зависящего от скорости сближения. Одновременно с включением корректирующего усилия производят разворот снаряда по крену до ликвидации рассогласования по фазе в радиальной плоскости снаряда между промахом и корректирующим усилием. Длительность воздействия на траекторию корректирующего усилия регулируют. Его действие прекращается в момент обнуления угловой скорости линии визирования, что соответствует моменту обнуления промаха. Способ обеспечивает высокоточное наведение и преимущественно прямое попадание снаряда в цель. 5 ил.
Комментарии