Ракеты-носители с кольцеобразными внешними элементами и соответствующие системы и способы - RU2689690C2
Код документа: RU2689690C2
Чертежи












Описание
Область техники
Изобретение направлено главным образом на ракеты-носители с кольцеобразными внешними элементами и соответствующие системы и способы.
Предшествующий уровень техники
Ракеты использовались в течение многих лет для запусков с человеком на борту и без человека с полезной нагрузкой на орбиту Земли. Такие ракеты доставляли первых космонавтов в космос и на Луну, а также осуществляли запуск многочисленных спутников на земную орбиту и за её пределы. Такие ракеты используются для приведения в движение непилотируемых космических зондов и в более позднее время – для доставки оборудования, запасов и персонала на международную орбитальную космическую станцию.
Одной из постоянных проблем, связанных с полётами на ракете, является пригодность к повторному использованию системы. Аспекты изобретения направлены на решение этой проблемы.
Краткое описание чертежей
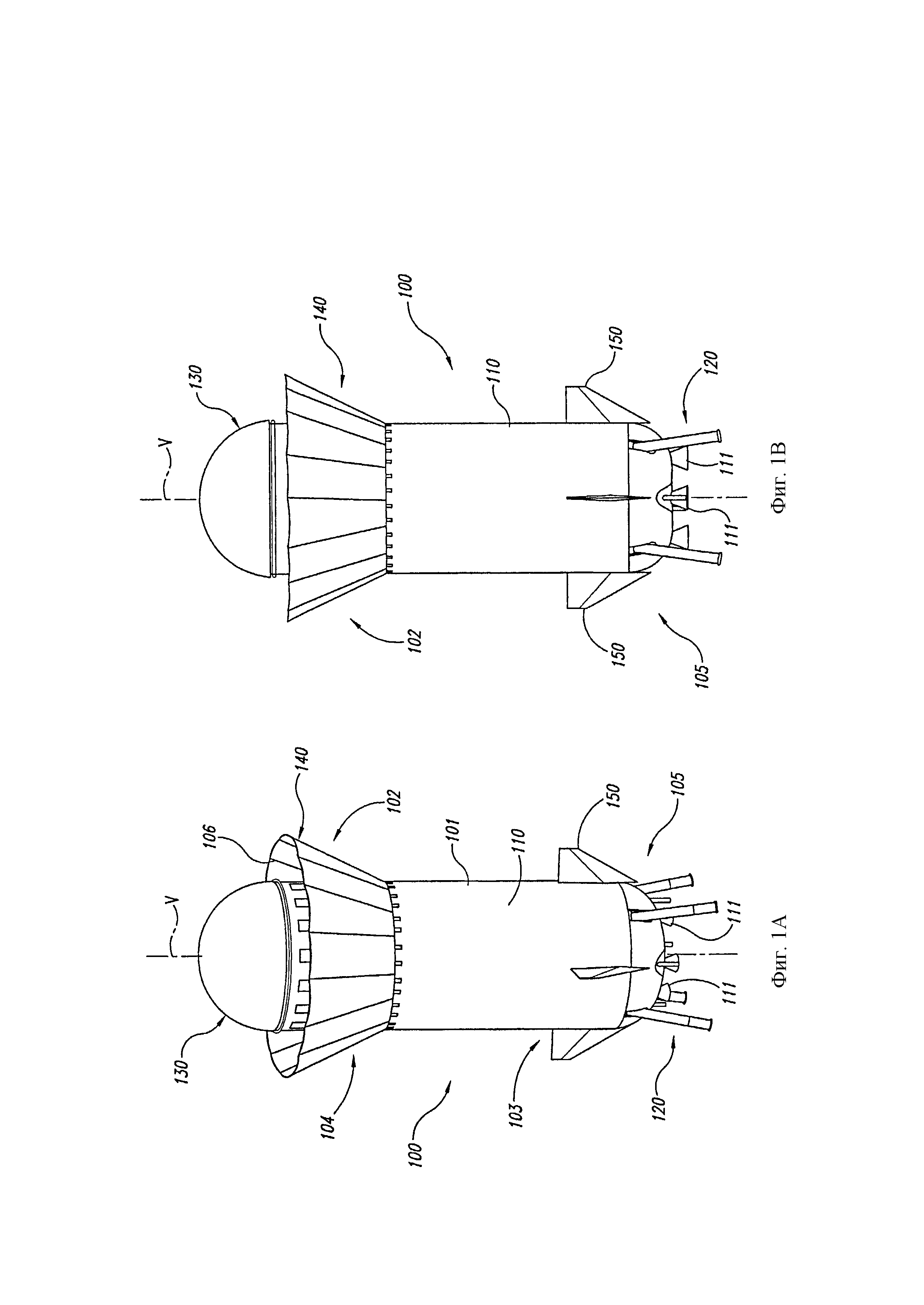
Фиг. 1А и 1В иллюстрируют ракету-носитель, имеющую развёртываемую поверхность раструба, в соответствии с вариантом осуществления изобретения.
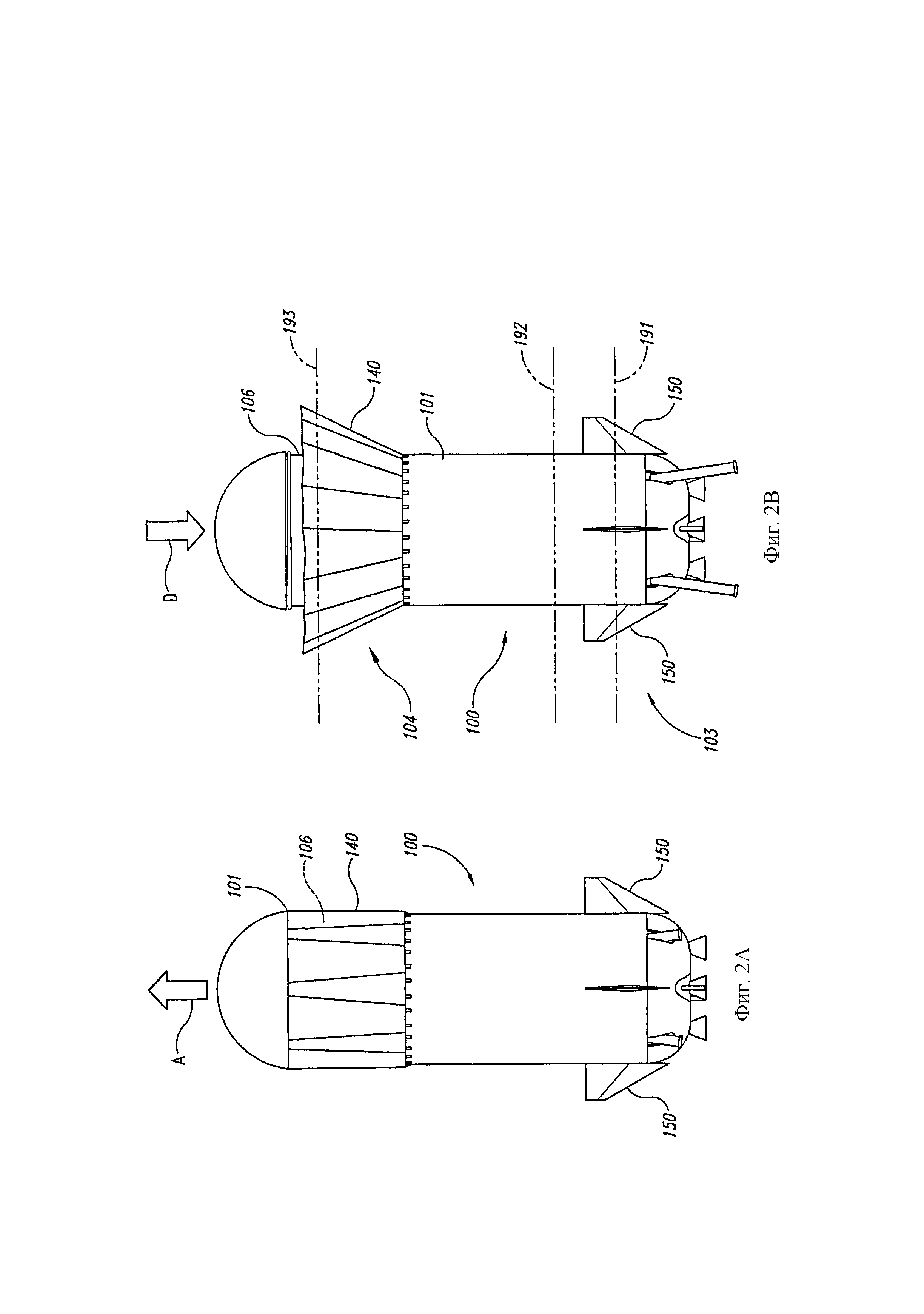
Фиг. 2А и 2В иллюстрируют ракету-носитель, соответственно, во время подъёма и спуска, в соответствии с вариантом осуществления изобретения.
Фиг. 3А и 3В являются увеличенными иллюстрациями части ракеты-носителя, иллюстрирующими развёртываемую поверхность раструба, соответственно, в сложенном положении и развёрнутом положении.
Фиг. 4А является частично боковым видом в вертикальной проекции ракеты-носителя, имеющей сложенные развёртываемые поверхности в соответствии с другим вариантом осуществления изобретения.
Фиг. 4В является частично боковым видом в вертикальной проекции ракеты-носителя, показанной на фиг. 4А с развёрнутыми поверхностями.
Фиг. 4С является частично видом сверху ракеты-носителя, показанной на фиг. 4В с неразвёрнутыми поверхностями.
Фиг. 5А и 5В являются, соответственно, частично боковым видом в вертикальной проекции и видами сверху ракеты-носителя, имеющей преобразующиеся поверхности, в соответствии с вариантом осуществления изобретения.
Фиг. 6А и 6В являются, соответственно, частично боковым видом в вертикальной проекции и видами сверху ракеты-носителя, имеющей два набора развёртываемых поверхностей, в соответствии с вариантом осуществления изобретения.
Фиг. 7 является частично изометрической иллюстрацией ракеты-носителя, имеющей конусообразную форму в направлении вверх и наружу, в соответствии с вариантом осуществления изобретения.
Фиг. 8А-8F являются частично боковыми видами в вертикальной проекции частей ракеты-носителя, имеющей конусообразные формы в направлении вверх и наружу, в соответствии с дополнительными вариантами осуществления изобретения.
Фиг. 9 является частично изометрической иллюстрацией топливного бака, имеющего форму и признаки в соответствии с ещё одним вариантом осуществления изобретения.
Фиг. 10 является боковым видом в вертикальной проекции с частичным разрезом топливного бака в соответствии с ещё одним вариантом осуществления изобретения.
Фиг. 11 является частично боковым видом в вертикальной проекции системы ракеты-носителя, имеющей кольцевой элемент в соответствии с вариантом осуществления изобретения настоящей технологии.
Фиг. 12А является частично боковым видом в вертикальной проекции варианта осуществления изобретения ракеты-носителя, показанной на фиг. 11, с удалённой второй ступенью.
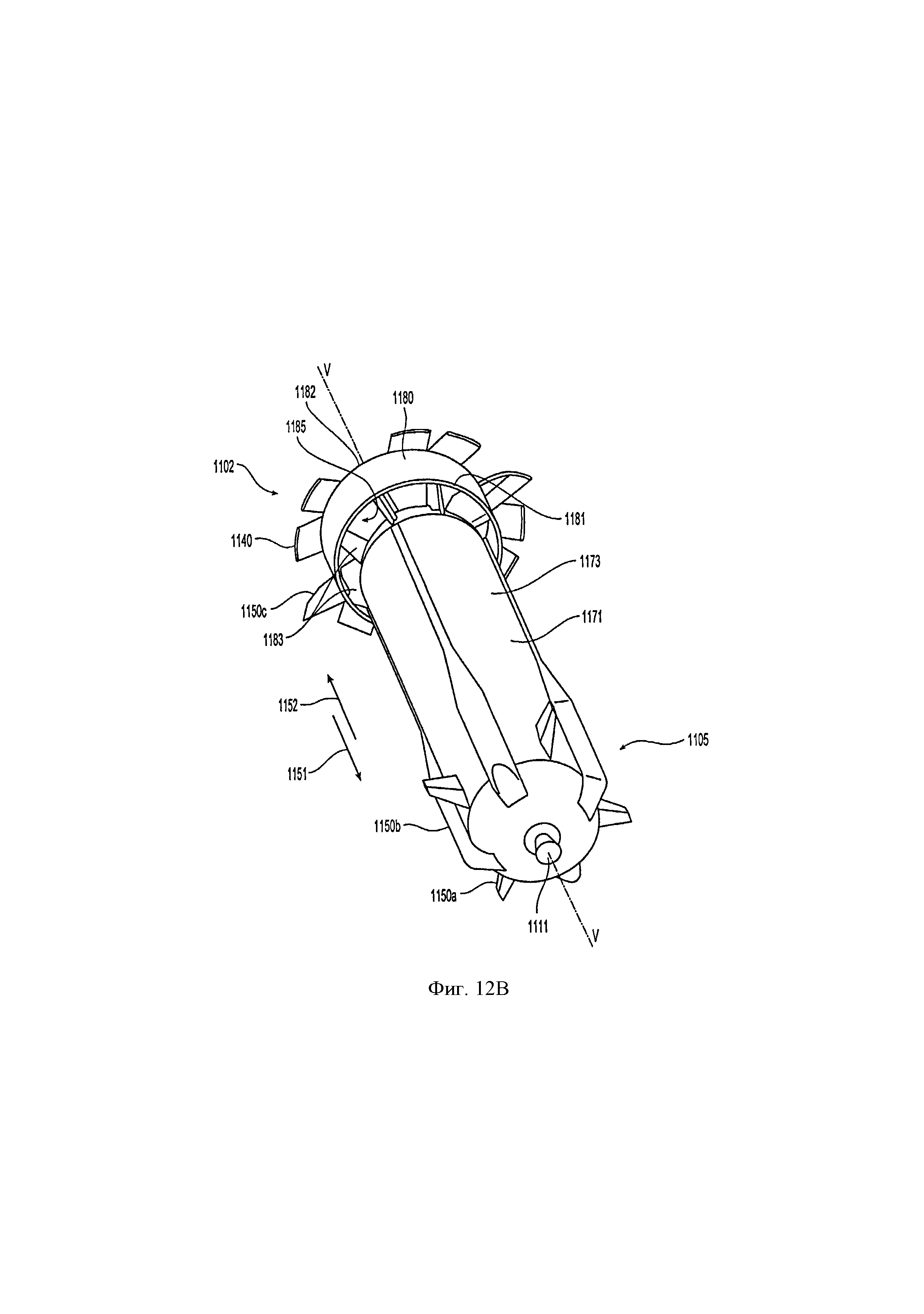
Фиг. 12В и 12С являются изометрическими видами, соответственно, снизу и сверху варианта осуществления изобретения ракеты-носителя, показанной на фиг. 12А.
Фиг. 13 является частично изометрической иллюстрацией развёртываемого стабилизатора и соответствующего кожуха в соответствии с вариантом осуществления изобретения настоящей технологии.
Фиг. 14 является частично изометрической иллюстрацией многоступенчатой ракеты-носителя, имеющей кольцевой элемент в соответствии с другим вариантом осуществления изобретения настоящей технологии.
Фиг. 15 является частично вертикальной проекцией второго конца первой ступени ракеты-носителя, имеющей сплющенную закрывающую поверхность, в соответствии с другим вариантом осуществления изобретения настоящей технологии.
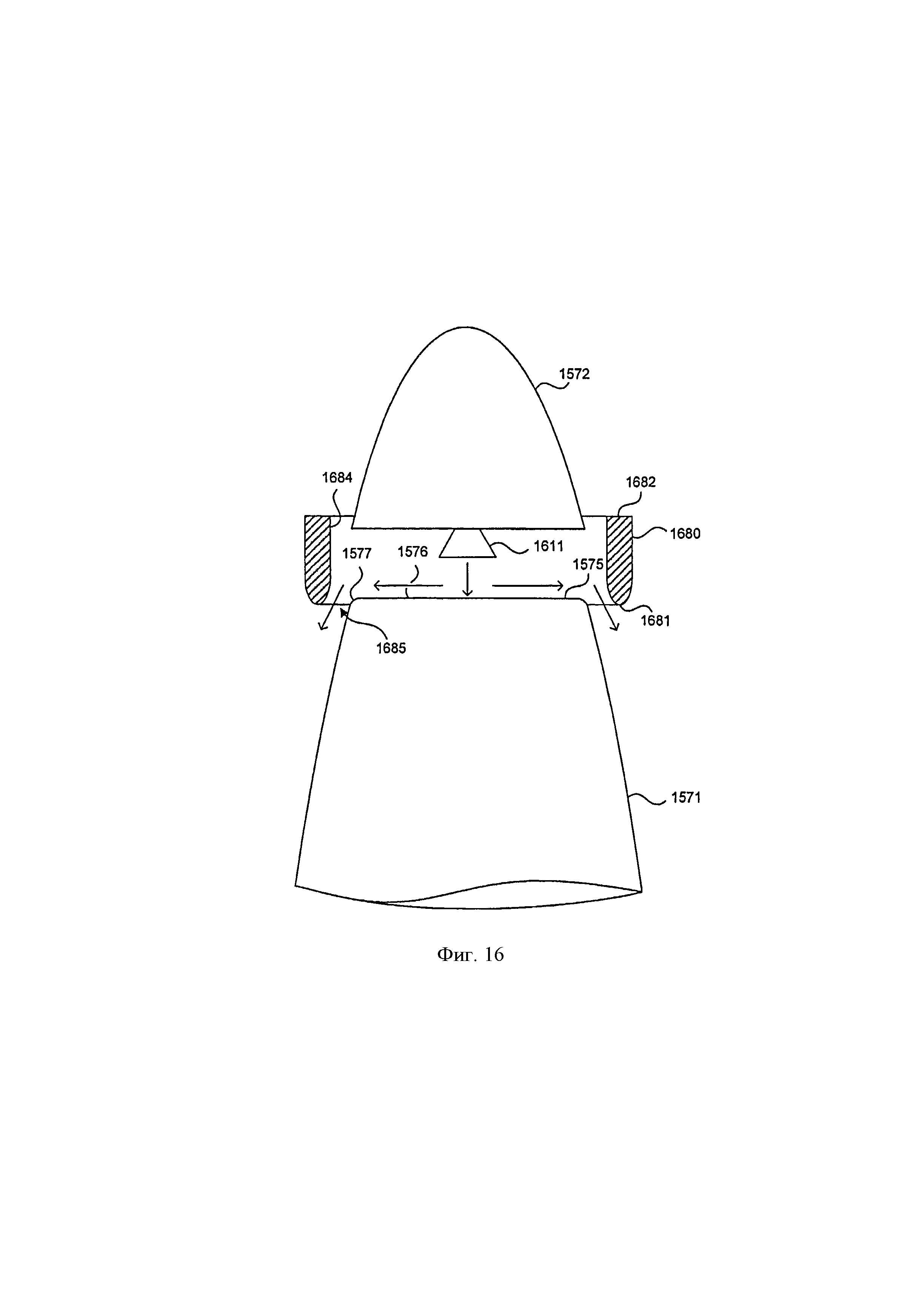
Фиг. 16 является частично боковым видом с вертикальной проекцией варианта осуществления изобретения первой ступени, показанной на фиг. 15, со второй ступенью и кольцевым элементом, позиционированным в соответствии с другим вариантом осуществления изобретения настоящей технологии.
Варианты осуществления изобретения
Изобретение направлено главным образом на запускаемые транспортные средства (например, ракеты) с кольцеобразными внешними элементами, и/или фиксированные и развёртываемые поверхности для торможения, а также соответствующие системы и способы. Некоторые подробности, описывающие структуры и процессы, являющиеся хорошо известными, и часто взаимодействующими с обтекаемыми поверхностями ракеты и/или другими структурами, не излагаются в последующем описании с целью обеспечения краткости. Кроме того, хотя последующее описание изобретения формулирует несколько вариантов его осуществления, некоторые другие варианты могут иметь различные конфигурации, компоновки, и/или компоненты, по сравнению c теми, которые описывались в этом разделе. В частности, другие варианты осуществления изобретения могут иметь дополнительные элементы, и/или у них могут отсутствовать один или более из элементов, описываемых далее со ссылками на фиг. 1А-16.
Многие описанные далее варианты осуществления изобретения этой технологии могут иметь форму выполняемых компьютером команд, включая подпрограммы, выполняемые программируемыми компьютером или контроллером. Специалисты в данной области техники понимают, что технология может использоваться на компьютерных системах, которые отличаются от описанных и показанных далее. Технология может осуществляться в специализированном компьютере или процессоре для обработки данных, которые специфически программируются, конфигурируются или конструируются для выполнения одной или нескольких выполняемых компьютером команд, описываемых далее. Соответственно, термины «компьютер» и «контроллер», как они в целом используются здесь, относятся к любому процессору для обработки данных и могут включать в себя устройства для выхода в Интернет и портативные устройства (включая маленькие компьютеры, умещающиеся на ладони, носимые компьютеры, сотовые или мобильные телефоны, мультипроцессорные системы, на основе процессора или программируемая бытовая электронная аппаратура, сетевые компьютеры, миникомпьютеры, и подобное оборудование). Информация, обрабатываемая этими компьютерами, может быть представлена в любой подходящей среде отображения, включая дисплей на электронно-лучевой трубке или жидкокристаллический дисплей.
Технология также может использоваться в распределённых конфигурациях, где задачи или модули выполняются устройствами дистанционной обработки данных, которые соединяются через сеть коммуникаций. В распределённой вычислительной конфигурации программные модули или подпрограммы могут находиться в локальных или дистанционных запоминающих устройствах. Аспекты описываемой далее технологии могут сохраняться или распределяться на считываемой компьютером среде, включая магнитные, или оптически считываемые, или съёмные компьютерные диски, также как и распределяться электронным способом через компьютерные сети. В отдельных вариантах осуществления изобретения структуры и передача данных, относящихся к отдельным аспектам технологии, также охватываются объёмом данной технологии.
Фиг. 1А является изометрической иллюстрацией при виде сверху ракеты-носителя 100, выполненной в соответствии с вариантом осуществления изобретения. Фиг. 1В является боковым видом в вертикальной проекции ракеты-носителя 100, показанной на фиг. 1А. Как показано на фиг. 1А и 1В, ракета-носитель 100 может быть ракетой (например, орбитальный или суборбитальный ракетой-носителем), которая включает в себя модуль 110 с двигательной установкой, переносящий модуль 130 с полезной нагрузкой. Модуль 110 с двигательной установкой может включать в себя один или более двигателей, имеющих соответствующие двигательные выпускные сопла 111, расположенные в направлении первого или кормового конца 105 ракеты-носителя 100. Ракета-носитель 100 может иметь вытянутую форму вдоль продольной оси V, с обращённой наружу открытой поверхностью 101, имеющей первую область 103 в направлении первого конца 105, и вторую область 104 в направлении второго или переднего конца 102 ракеты-носителя 100. Ракета-носитель 100 может включать в себя посадочное шасси 120, расположенное в направлении первого конца 105 для приземления с ориентацией посадки "на хвост". Ракета-носитель 100 может дополнительно включать в себя развёртываемую или перемещаемую иным способом замедляющую поверхность 140 (например, поверхность раструба), расположенную в направлении второго конца 102 ракеты-носителя 100. Развёртываемая поверхность 140 может складываться во время выведения на орбиту и развёртываться во время спуска, чтобы стабилизировать и уменьшить скорость ракеты-носителя 100 во время спуска и посадки "на хвост". В отдельных вариантах осуществления изобретения развёртываемая поверхность 140 для торможения может перемещать аэродинамический центр давления ракеты-носителя 100 (например, выше центра тяжести ракеты-носителя 100) таким образом, чтобы улучшать стабильность и/или улучшать аэродинамическое качество ракеты-носителя во время спуска и посадки "на хвост". Хвостовое оперение 150 в направлении к кормовому концу 105 ракеты-носителя 100 может действовать как стабилизаторы и/или управляющие поверхности во время выведения на орбиту, а также могут действовать как стабилизаторы и/или управляющие поверхности во время спуска. Соответственно, хвостовое оперение 150 может работать при перемещении вперёд (например, во время выведения на орбиту), и при перемещении в обратном направлении (например, во время спуска), как описывается в заявке США 12/712,083 того же заявителя, имеющей название «Двунаправленные управляющие поверхности для использования с высокоскоростными ракетами-носителями и соответствующие системы и способы».
В отдельном варианте осуществления изобретения модуль 130 полезной нагрузки может быть использован для перемещения груза и/или экипажа. В варианте осуществления изобретения, показанном на фиг. 1А и 1В, модуль 130 полезной нагрузки может иметь полусферическую форму, а в других вариантах осуществления изобретения модуль 130 полезной нагрузки может иметь другие формы.
В отдельном варианте осуществления изобретения ракета-носитель 100 включает в себя пять двигателей внутри ракеты-носителя 100 (не показанные на фиг. 1А и 1В), при этом каждый из них имеет соответствующее выхлопное сопло 111 двигателя. Двигатели используются во время активного участка полёта ракеты, чтобы перемещать ракету-носитель 100 вверх (например, вертикально, с компонентом направления от места старта или без него). По выбору двигатели также могут иметь управляемый вектор тяги, чтобы управлять ракетой-носителем 100 во время активного участка полёта ракеты, отдельно или в комбинации с другими системами управления.
После того как двигатели завершили этап активного участка полёта ракеты, развёртываемая поверхность 140 может быть развёрнута для замедления спуска ракеты-носителя 100. Развёртываемая поверхность 140 может улучшать стабильность, когда ракета-носитель 100 спускается вниз (садится "на хвост") за счёт увеличения сопротивления среды и за счёт уменьшения предельной скорости падения ракеты-носителя 100 перед тем как двигатели снова запустятся перед вертикальным приземлением. В отдельном варианте осуществления изобретения развёртываемая поверхность 140 используется только один раз во время полёта, а затем убирается бригадой наземного обслуживания после приземления ракеты-носителя 100. Хвостовое оперение 150 может использоваться для управления ракетой-носителем 100 во время спуска и приземления. Соответственно, ракета-носитель 100 может направляться непосредственно назад – на то место, с которого она стартовала. В других вариантах осуществления изобретения ракета-носитель 100 может направляться в другие места. В любом из этих вариантов осуществления изобретения, когда ракета-носитель 100 приближается к месту приземления, двигатели могут быть перезапущены, чтобы дополнительно замедлить снижение ракеты-носителя 100. В этом случае шасси 120 разворачивается для окончательного приземления.
Фиг. 2А является частично боковым видом в вертикальной проекции варианта осуществления изобретения ракеты-носителя 100 во время ее подъёма, обозначенного стрелкой А. Во время подъёма и выведения на орбиту развёртываемая поверхность 140 (которая образует часть внешней поверхности 101) складывается и, соответственно, может позиционироваться так чтобы охватывать подстилающую поверхность 106 ракеты-носителя 100 и в целом находиться на одном уровне с остальной внешней поверхностью 101. Во время подъёма и выведения на орбиту шасси 120 (фиг. 1А и 1В) находятся в сложенном положении.
Фиг. 2В иллюстрирует ракету-носитель 100 во время спуска, обозначенного стрелкой D. Во время спуска развёртываемая поверхность 140 находится в развёрнутом положении, например, за счёт развертывания поверхности 140 так, что она выходит наружу от подстилающей поверхности 106. Как указано выше, такая конфигурация будет замедлять ракету-носитель 100, а также может стабилизировать ракету-носитель. Например, как отмечалось выше, развёртываемая поверхность 140 может сместить центр давления, воздействующего на ракету-носитель 100, в направлении вверх (например, выше центра тяжести ракеты-носителя). Таким образом, гравитационные силы, воздействующие на ракету-носитель 100, будут стабилизировать возмущения, которые вызваны аэродинамическими силами, воздействующими на ракету-носитель 100.
Один из эффектов от развёртывания поверхности 140 состоит в том, что увеличивается площадь поперечного сечения или площадь опоры платформы ракеты-носителя 100 на вторую область 104 по отношению к первой области 103. Например, площадь поперечного сечения ракеты-носителя 100, произведённая в первом сечении 191 (включая площадь поперечного сечения стабилизаторов 150) или втором сечении 192, при этом оба сечения расположены внутри первой области 103, будет меньше, чем площадь поперечного сечения ракеты-носителя 100 в третьем сечении 193, расположенном во второй области 104, когда развёртываемая поверхность 140 разворачивается. Это изменение площади поперечного сечения может быть временным, фактически за счёт способности к последующему складыванию, или в другом случае – за счёт перемещения развёртываемой поверхности 140. В других вариантах осуществления изобретения, описываемых в дальнейшем со ссылками на фиг. 7-10, увеличенная площадь поперечного сечения может быть фиксированной частью внешней геометрии ракеты-носителя.
Фиг. 3А является частично боковым видом второй области 104 ракеты-носителя 100 со сложенной развёртываемой поверхностью 140, например, во время активного участка полёта ракеты или фазы подъёма на орбиту ракеты-носителя 100. Развёртываемая поверхность 140 может включать в себя множество развёртываемых створок 141 или других подходящих поверхностей или поверхностных элементов. В сложенной конфигурации створки 141 закрываются вверх на подстилающую поверхность 106 ракеты-носителя 100. Соответственно, створки 141 могут быть выполнены из секций цилиндров таким образом, чтобы соответствовать форме цилиндрической внешней поверхности 101. В других вариантах осуществления изобретения створки 141 могут иметь другие формы. В любом из этих вариантов осуществления изобретения внешние створки 141а могут чередоваться с промежуточными внутренними створками 141b и накладываться на них.
Фиг. 3В является частично изометрической иллюстрацией при виде сверху второй области 104 ракеты-носителя 100, иллюстрирующим развёртываемую поверхность 140 в развёрнутой конфигурации. В этой конфигурации створки 141 были повёрнуты наружу от подстилающей поверхности 106 ракеты-носителя 100, например, с помощью одного или более исполнительных механизмов 142. В отдельном варианте осуществления изобретения смежные створки 141 могут накладываться одна на другую, когда они складываются, и могут накладываться или прилегать друг к другу, когда они разворачиваются. В других вариантах осуществления изобретения створки 141 могут быть разнесены или, по меньшей мере, частично разнесены между собой, когда они разворачиваются. Специфическое расположение, выбранное для развёртываемой поверхности 140 может зависеть от ожидаемого уровня торможения, которое должно обеспечиваться развёртываемой поверхностью 140, интеграции с ракетой-носителем 100, и/или от других факторов.
В отдельном варианте осуществления изобретения развёртываемая поверхность 140 включает в себя створки 141, каждая из которых разворачивается с помощью отдельного пневматического, гидравлического, электрического или другого исполнительного механизма. Створки 141 могут накладываться друг на друга при складывании с первым комплектом из восьми створок 141, расположенных снаружи, и вторым комплектом из восьми створок 141, расположенных внутри и чередующихся со створками первого комплекта, таким образом между смежными створками 141 не существует значительных зазоров, когда поверхность 140 полностью разворачивается. Ракета-носитель 100 может включать в себя замки крепления или другие детали, которые удерживают створки 141 в сложенном положении перед тем как даётся команда на их открывание. В отдельном варианте осуществления изобретения вторая область 104 ракеты-носителя 100 может включать в себя композитные многослойные панели, на оборотной стороне которых располагаются рамы из алюминиевых колец для дополнительной жёсткости. Створки 141 также могут быть образованы из композитных многослойных панелей. В других вариантах осуществления изобретения любые из этих структур могут иметь другие композиции.
В отдельном варианте осуществления изобретения индивидуальные створки 141 перемещаются во взаимодействии, таким образом каждая створка перемещается на ту же величину, с одинаковой скоростью и в том же самом направлении (например, наружу или внутрь), как и другие створки. В других вариантах осуществления изобретения индивидуальные створки 141 развёртываемой поверхности 140 могут перемещаться и/или контролироваться индивидуально. В таких вариантах осуществления изобретения створки 141 могут перемещаться по отношению друг к другу с различными скоростями, за счёт различных величин и/или различных направлений, например, чтобы управлять ракетой-носителем 100 в добавление к ее замедлению. Перемещение створок 141 может управляться контроллером 160. В одном варианте осуществления изобретения контроллер 160 является электромеханическим устройством, которым снабжена ракета-носитель 100. В других вариантах осуществления изобретения контроллер 160 является цифровым устройством или устройством 160 на основе компьютера, которым снабжена ракета-носитель 100, или это устройство базируется на земле и имеет машиночитаемые носители, содержащие соответствующие команды. Контроллер 160 может принимать входные сигналы от любого из разнообразных датчиков (например, акселерометра, детектора глобальной системы навигации и место определения, датчика высоты, датчика давления, или датчика времени (например, часов)), на основании которых контроллер 160 выдаёт команды для управления створками 141. Контроллер 160 также может управлять другими функциями ракеты-носителя 100, например, работой двигателей, шасси и управляющими поверхностями.
Как указывалось выше, створки 141 могут герметично входить в контакт между собой при их разворачивании. В других вариантах осуществления изобретения соседние створки могут быть разнесены между собой при их разворачивании, образуя проходящие в осевом направлении зазоры. В ещё одном варианте осуществления изобретения створки 141 могут быть вентилируемыми. Например, створки 141 могут включать в себя вентиляционные отверстия 143 (показанные пунктирными линиями на фиг. 3В), которые позволяют воздуху проходить через створки 141. Вентиляционные отверстия 143 могут быть расположены в шахматном порядке или с другой подходящей конфигурацией. В дополнительных аспектах этого варианта осуществления изобретения отдельные вентиляционные отверстия 143 могут выборочно открываться и закрываться (например, через подвижную панель, диафрагму или другое подходящее устройство), чтобы контролировать поток воздуха через отверстия 143. Таким образом, сопротивление среды, создаваемое развёртываемой поверхностью 140, может регулироваться. В дополнительном аспекте этого варианта осуществления изобретения вентиляционные отверстия 143 в одном окружном направлении могут открываться, находящиеся в другом окружном направлении, могут закрываться, чтобы обеспечивать различное сопротивление среды, которое может в свою очередь использоваться для управления ракетой-носителем 100.
В описанных выше вариантах осуществления изобретения со ссылками на фиг. 1А-3В, развёртываемая поверхность позиционируется в направлении к верхнему или второму концу ракеты-носителя. Фиг. 4А является частично схематическим боковым видом в вертикальной проекции ракеты-носителя 400, имеющей развёртываемую поверхность, расположенную в направлении нижнего конца, в соответствии с другим вариантом осуществления изобретения. В одном аспекте этого варианта осуществления изобретения ракета-носитель 400 имеет внешнюю поверхность 401 с первой или нижней областью 403, имеющей расширяющуюся наружу часть, а также вторую или верхнюю область 404 выше первой области 403. Развёртываемая поверхность 440 располагается в первой области 403. Развёртываемая поверхность 440 может включать в себя четыре развёртываемых панели 441 (три из которых показаны на фиг. 4А), которые изображены в сложенном положении. Фиг. 4В и 4С иллюстрируют, соответственно, боковой вид в вертикальной проекции и виды сверху ракеты-носителя 400 с развёртываемой поверхностью 440 в развёрнутом положении. В этом положении панели 441 поворачиваются наружу от подстилающей поверхности 406 ракеты-носителя 400, чтобы увеличить площадь поперечного сечения ракеты-носителя 400 сверх той, которая производится расширяющейся частью внешней поверхности 401 в первой области 403. Эта компоновка может дополнительно увеличить стабильность формы корпуса с расширяющейся частью при спуске.
Фиг. 5А является частично боковым видом в вертикальной проекции ракеты-носителя 500, имеющей развёртываемую поверхность 540, которая сдвигается во время выполнения операции. Фиг. 5В является частично схематическим видом сверху ракеты-носителя 500, показанной на фиг. 5А. Как в целом показано на фиг. 5А и 5В, развёртываемая поверхность 540 может включать в себя множество стабилизаторов или элементов 541 в виде лопасти (четыре из которых показаны на фиг. 5А и 5В), которые располагаются в направлении первой или нижней области 503 ракеты-носителя 500 во время подъёма на орбиту. Соответственно, развёртываемые поверхности 540 могут обеспечивать стабильность и, по выбору, управлять ракетой-носителем 540 из положения ниже центра тяжести ракеты-носителя. Перед спуском с приземлением на хвост или во время него элементы 541 в виде лопасти смещаются в направлении вверх, как обозначается стрелками U, таким образом, чтобы они располагались во второй или верхней области 504 ракеты-носителя. В этом положении элементы 541 хвостового оперения могут действовать таким образом, чтобы перемещать центр давления ракеты-носителя 500 в направлении вверх, например, выше центра тяжести ракеты-носителя. Вследствие того, что элементы 541 хвостового оперения являются устройствами, создающими подъёмную силу, ракета-носитель отклоняется от вертикального положения, чтобы обеспечить угол атаки, необходимый для создания стабилизаторами достаточной аэродинамической подъёмной силы. Ракета-носитель 500 может вернуться в полностью вертикальное положение, перед тем как она приземлится. Ракета-носитель 500 может включать в себя направляющие, рельсы или другие подходящие элементы, чтобы осуществлять перемещение элементов 541 хвостового оперения.
Фиг. 6А и 6В являются частично, соответственно, боковым видом в вертикальной проекции и видами сверху ракеты-носителя 600, имеющей множество развёртываемых поверхностей, которые работают во взаимодействии, чтобы управлять расположением центра давления ракеты-носителя по отношению к ее центру тяжести. В частности, ракета-носитель 600 может включать в себя первую или нижнюю развёртываемую поверхность 640а, расположенную в первой или нижней области 603 ракеты-носителя 600, и вторую или верхнюю развёртываемую поверхность 640b, расположенную во второй или верхней области 604 ракеты-носителя 600. Первая развёртываемая поверхность 640а может включать в себя первые элементы 641а раструба, а вторая развёртываемая поверхность 640b может включать в себя вторые элементы 641b раструба. И первые элементы 641а, и вторые элементы 641b могут развёртываться наружу относительно ракеты-носителя 600, а затем возвращаться в сложенное положение, как обозначено, соответственно, стрелками Р1 и Р2. Во время подъёма на орбиту вторые элементы 641b раструба могут складываться в целом параллельно внешней поверхности ракеты-носителя 600, в то время как первые элементы 641а раструба поворачиваются в направлении наружу, чтобы обеспечивать стабильность и/или управление. В отдельном варианте осуществления изобретения первые элементы 641а раструба могут оставаться сложенными во время подъёма на орбиту, до тех пор, пока не возникнет необходимость обеспечить дополнительную стабильность. Такая необходимость может возникнуть в том случае, если один или более двигателей окажется неисправным во время подъёма на орбиту. Во время спуска относительные ориентации первого и второго элементов 641а и 641b могут поворачиваться в противоположном направлении. В частности, первые элементы 641а могут складываться в целом параллельно внешней поверхности ракеты-носителя 600, в то время как вторые элементы 641b складываются таким образом, чтобы обеспечивать центр давления, создаваемого при перемещении, в целом аналогично тому, как описывалось выше со ссылками на фиг. 1А-2В.
В нескольких описанных выше вариантах осуществления изобретения со ссылками на фиг. 1А-6В, развёртываемые поверхности управляют изменением центра давления между временем подъёма на орбиту и спуском ракеты-носителя. Кроме того, существуют дополнительные компоновки, которые включают в себя развёртываемые поверхности, описываемые далее со ссылками на фиг. 11-16. В других вариантах осуществления изобретения, описываемых далее со ссылками на фиг. 7-10, вся форма ракеты-носителя в целом может оставаться неизменной, но может иметь изменения в форме поперечного сечения между нижним концом ракеты-носителя и верхним концом ракеты-носителя, что обеспечивает увеличенное сопротивление среды во время спуска, если сравнивать с традиционной цилиндрической формой ракеты, или с направленной вверх или внутрь конусностью. Соответственно, внешняя поверхность ракеты-носителя может позиционироваться (например, фиксироваться) или может быть позиционируемой (например, подвижной) таким образом, чтобы достигать желаемого изменения формы поперечного сечения.
Фиг. 7 является частично схематической изометрической иллюстрацией ракеты-носителя 700, имеющей удлинённую форму вдоль оси V ракеты-носителя между первым концом 705 и вторым концом 702. Ракета-носитель 700 включает в себя модуль 730 для полезной нагрузки в направлении второго конца 702, модуль 710 с двигательной установкой, имеющий одно или более выхлопных сопел 711, в направлении первого конца 705. В отдельном варианте осуществления изобретения ракета-носитель 700 включает в себя три сопла 711, при этом два внешних сопла являются фиксированными, а центральное сопло является соплом с изменяемым вектором тяги для управления ракетой-носителем. В других вариантах осуществления изобретения ракета-носитель 700 может иметь другое количество и/или компоновки двигателей и взаимосвязанных с ними сопел. Ракета-носитель 700 также может включать в себя стабилизаторы 750, которые могут приводиться в действие, чтобы обеспечивать дополнительное управление ракетой-носителем, как во время подъёма и выведения на орбиту, так и во время спуска. Внешняя поверхность 701 ракеты-носителя 700 включает в себя первую область 703 в направлении первого конца 705, и вторую область 704 в направлении второго конца 702. Площадь поперечного сечения ракеты-носителя 700, ограниченная внешней поверхностью 701, увеличивается вдоль оси V ракеты-носителя от первой области 703 ко второй области 704. Соответственно, площадь поперечного сечения ракеты-носителя 700, произведённая в первом сечении 791 в первой области 703, является меньшей, чем соответствующая площадь поперечного сечения во втором сечении 792 во второй области 704.
Форма внешней поверхности 701 модуля 710 с двигательной установкой и модуля 730 для полезной нагрузки может быть выбрана таким образом, чтобы создавать желаемые характеристики сопротивления среды как для подъёма на орбиту, так и для спуска. В частности, форма внешней поверхности 701 в целом выбирается таким образом, чтобы уменьшать или минимизировать аэродинамическую тряску во время подъёма на орбиту, в частности при сверхзвуковых скоростях, в то же время, обеспечивая аэродинамические силы, которые стабилизируют ракету-носитель во время спуска с ориентацией посадки "на хвост".
Одной из характеристик описанной выше компоновки со ссылками на фиг. 7, является такая характеристика, которая может уменьшить необходимость развёртываемых поверхностей для торможения. Соответственно, ожидается, что эта компоновка может уменьшить общий вес ракеты-носителя. И наоборот, ожидаемое преимущество от развёртываемых поверхностей, описанное выше со ссылками на фиг. 1А-6В, состоит в том, что они могут обеспечивать более значительную силу торможения, чем сопротивление среды, создаваемое внешней обечайкой (OML - outer mold line) ракеты-носителя 700, таким образом уменьшая количество топлива, используемое двигателями для торможения ракеты-носителя во время спуска. Эта компоновка может смещать или частично смещать ожидаемый дополнительный вес, получаемый в результате наличия развёртываемых поверхностей. Конкретный выбор поверхностей для торможения (например, развёртываемых поверхностей или фиксированных расширяющихся поверхностей раструба) может зависеть от множества факторов, включающих в себя миссию, которую должна выполнять ракета-носитель, и полезную нагрузку, которую должна перевозить ракета-носитель. Эти две компоновки необязательно должны быть взаимоисключающими. Соответственно, в других вариантах осуществления изобретения развёртываемые поверхности могут комбинироваться с фиксированными формами внешней обечайки (OML), чтобы обеспечивать желаемую комбинацию сил торможения и веса ракеты-носителя.
В любом из двух используемых вариантов, т.е. в единственном варианте или в комбинации с развёртываемыми поверхностями для торможения, фиксированная внешняя поверхность ракеты-носителя может иметь разнообразие форм, которые должны, как ожидается, увеличивать сопротивление среды во время спуска ракеты-носителя, без неоправданного добавления аэродинамического сопротивления ракеты-носителя во время подъёма на орбиту. Фиг. 8А-8F иллюстрируют репрезентативный выбор таких форм ракеты-носителя. Для иллюстративных целей модули для полезной нагрузки и компоновки двигатель/сопло, также как и другие внешние характеристики ракеты-носителя (например, стабилизаторы), не показаны на фиг. 8А-8F. Во время выполнения операции модуль для полезной нагрузки может спускаться отдельно от модуля с двигательной установкой, как показано на фиг. 8А-8F, или он может оставаться прикреплённым к модулю с двигательной установкой во время спуска, как показано на фиг. 7. Фиг. 8А-8С иллюстрируют соответствующие ракеты-носители 800а, 800b, 800с, имеющие соответственно поверхности внешней обечайки (OML), которые изменяются неоднообразным образом по длине соответствующей оси ракеты-носителя. В частности, эти формы включают в себя в целом цилиндрическую часть в направлении к нижнему концу ракеты-носителя, и направленную наружу и вверх сужающуюся секцию в направлении к верхнему концу ракеты-носителя. Сужение может быть линейным (например, коническим) или нелинейным (например, выпуклым или вогнутым). В других вариантах осуществления изобретения, проиллюстрированных на фиг. 8D, 8E и 8F, соответствующее ракеты-носители 800d, 800e и 800f включают в себя, соответственно, внешние поверхности, которые являются непрерывными коническими от нижнего конца ракеты-носителя к сочленению с соответствующим отсеком для полезной нагрузки (не показан). Особый угол расхождения поверхностей относительно оси ракеты-носителя может быть выбран в зависимости, например, от миссии ракеты-носителя и ее полезной нагрузки, чтобы обеспечить большую величину аэродинамического сопротивления во время спуска, а также маленькое и постепенное увеличение сопротивления во время подъёма.
В любом из вышеописанных вариантов осуществления изобретения топливо перемещается в баках, позиционируемых внутри (или образуя часть из) внешней поверхности ракеты-носителя. Баки для жидкого ракетного топлива выполняются в соответствии с отдельными вариантами осуществления изобретения настоящего описания и подходят для ракет-носителей выведения на орбиту, при этом они имеют формы, которые изготавливаются по специальным техническим требованиям, чтобы (а) уменьшать динамические эффекты плескания жидкости внутри бака, и (b) устанавливаться внутри конусообразной в направлении вверх и наружу внешней обечайки (OML) ракеты-носителя. Например, бак внешней обечайки может изменяться за счёт модулирования радиуса бака таким образом, чтобы уменьшать дестабилизирующие эффекты от плескания жидкости. В дополнительном отдельном аспекте этого варианта осуществления изобретения топливный бак может включать в себя внутренние разделительные перегородки против плескания, которые формуются в пластиковой облицовке топливного бака. Эта компоновка может исключить необходимость механического крепления разделительных перегородок внутри бака. В других вариантах осуществления изобретения разделительные перегородки могут быть сформированы изнутри бака. В дополнительном аспекте вышеописанных вариантов осуществления изобретения форма бака может быть выполнена таким образом, чтобы увеличивать и/или оптимизировать расположение центра тяжести ракетного топлива внутри ракеты-носителя таким образом, чтобы уменьшать дестабилизирующие эффекты, которые могут возникнуть в противном случае, когда жидкое ракетное топливо внутри бака начинает плескаться во время стандартных операций.
Фиг. 9 является частично боковым видом в вертикальной проекции части ракеты-носителя 900 (например, ракеты), имеющей топливный бак 960, выполненный в соответствии с отдельным вариантом осуществления изобретения. Ракета-носитель 900 может иметь в целом цилиндрическую форму, как показано сплошными линиями на фиг. 9, или любую из описанных выше конусообразных форм в направлении вверх и наружу, как показано пунктирными линиями на фиг. 9. В отдельном аспекте этого варианта осуществления изобретения топливный бак 960 для жидкого ракетного топлива имеет переднюю или верхнюю область 961 большего размера с внешней поверхностью, имеющей в целом форму купола, и заднюю или нижнюю область 963 меньшего размера также с внешней поверхностью, имеющей в целом форму купола, но с меньшим диаметром по сравнению с диаметром передней области 961. Верхняя и нижняя области 961, 963 могут позиционироваться на противоположных сторонах промежуточной области 962, имеющей в целом коническую форму с радиусом, который изменяется линейно по длине. Соответственно, бак 960 может иметь общую грушевидную форму, и может быть симметричным относительно продольной срединной оси 966 бака. Однако форма бака 960 является асимметричной относительно поперечной срединной оси 967. Эта форма может быть выбрана, основываясь на доступной высоте и объёме внутри ракеты-носителя 900, учитывая желание регулировать центр тяжести ракетного топлива из высокой точки внутри ракеты-носителя 900 во время подъёма на орбиту к более низкой точке в ракете-носителе 900 во время спуска с помощью формы (например, конусообразной формы) внешней обечайки (OML) ракеты-носителя и/или при желании модулировать требование по демпфированию плескания топлива для различных фракций ракетного топлива при заполнении бака.
Как указано выше, ракета-носитель 900 может быть выполнена так, чтобы перемещаться в направлении вперёд (например, носом вперёд) во время подъёма на орбиту, как обозначено стрелкой А, и может перемещаться в направлении назад (например, хвостом вперёд) во время спуска, как обозначено стрелкой D. По меньшей мере, в некоторых вариантах осуществления изобретения желательно сохранить центр тяжести ракетного топлива в высокой точке в ракете-носителе 900 во время подъёма на орбиту. Кроме того, плескание топлива является меньшей проблемой при более высоком заполнении фракций топлива, взаимосвязанной с подъёмом на орбиту. Соответственно, радиус передней области 961 может быть относительно большим по сравнению с шириной или диаметром ракеты-носителя 900. Поскольку свободная поверхность ракетного топлива падает ниже передней области 961 и находится в промежуточной области 962, центр тяжести ракетного топлива падает более быстрыми темпами, поскольку ракетное топливо обычно вытекает из бака 960 при постоянном объёмном расходе, а радиус бака уменьшается линейно вдоль длины. Это приводит к тому, что центр тяжести, расположенный в ракете-носителе 900 более низко, является более желательным расположением для стабильности при спуске. Соответственно, центр тяжести может падать более быстро во время более поздних фаз подъёма на орбиту и/или во время спуска.
В отдельном аспекте варианта осуществления изобретения, показанного на фиг. 9, топливный бак 960 может включать в себя элементы, которые ограничивают плескание топлива внутри бака 960. Например, бак 960 может включать в себя разделительные перегородки 964, которые проходят в направлении во внутреннюю область бака 960, чтобы обеспечивать (например, уменьшать) плескание топлива. Поскольку частота плескания и плещущаяся масса являются нелинейными функциями от радиуса бака, то уменьшение радиуса бака приводит к уменьшению плещущейся массы и к увеличению частоты плескания, при этом оба эти параметра уменьшают демпфирование плескания, требуемое для поддерживания стабильности управления ракетой-носителем. За счёт понижения центра тяжести ракетного топлива при более низком заполнении бака фракциями топлива (когда плескание становится более критическим) плечо силы от центра тяжести ракетного топлива до центра тяжести ракеты-носителя укорачивается и соответственно плескание имеет уменьшенный дестабилизирующий эффект на ракету-носитель 900. Благодаря форме бака, свободная поверхность ракетного топлива уменьшается нелинейно во время постоянной скорости выходного потока, и амплитуда плескания занимает некоторый период времени для своего развития. В отдельных вариантах осуществления изобретения разнесение соседних разделительных перегородок 964 может изменяться между передней областью 961 и задней областью 963, например, чтобы принимать во внимание вышеописанные нелинейности. В других вариантах осуществления изобретения разнесение разделительных перегородок может быть постоянным. Поскольку задняя область 963 удерживает намного меньшее объёмное количество ракетного топлива, то в этой области с меньшей вероятностью требуются разделительные перегородки 964, что может упростить конструкцию пресс-формы и изготовление при формовании.
В отдельном варианте осуществления изобретения бак 960 может быть выполнен из пластиковой облицовки и графитовой/эпоксидной внешней оболочки. Облицовка может предотвращать контакт между топливом и внешней оболочкой. Соответственно, бак 960 может использоваться с топливами (например, пероксидным топливом), которые были бы в противном случае несовместимыми с внешней оболочкой. В других вариантах осуществления изобретения бак 960 может нести в себе другие виды топлива и/или другие составляющие.
В любом из вышеописанных вариантов осуществления изобретения может быть трудно установить в баке 960 разделительные перегородки традиционного типа, поскольку (по меньшей мере в некоторых вариантах осуществления изобретения) облицовка бака изготавливается как единая деталь с помощью центробежной формовки. Соответственно, один из подходов состоит в том, чтобы формовать разделительные перегородки 964 против плескания как часть облицовки. Пресс-форма, используемая для этой операции, может иметь проходящие внутрь выступы, которые образуют разделительные перегородки 964, и которые отводятся в наружном направлении, когда пресс-форма открывается, таким образом, позволяя удалять бак 960. Этот подход позволяет создавать пустотелые полости (например, зазоры 965), открытые к внешней обечайке облицовки. Эти полости или зазоры 965 могут быть заполнены пеной низкой плотности или другим материалом, чтобы обеспечивать некоторую жёсткость для разделительных перегородок 964, выступающих в бак, и обеспечивать гладкую внешнюю поверхность вплотную к волоконной графитовой/эпоксидной внешней оболочке.
Фиг. 10 является частично схематической иллюстрацией с частичным разрезом топливного бака 960, расположенного в ракете-носителе 900 и имеющего разделительные перегородки 964, сконструированные в соответствии с ещё одним вариантом осуществления изобретения. В одном аспекте этого варианта осуществления изобретения топливный бак 960 является предварительно формованным (например, с помощью центробежной формовки), а разделительные перегородки 964 добавляются в дальнейшем. Бак 960 может включать в себя одну или более крышек 970 смотрового колодца (показанных как верхняя крышка 970а смотрового колодца и нижняя крышка 970b смотрового колодца), чтобы позволить обеспечить допуск к внутренней части бака 960. Крышки 970 также могут предусматривать соответствующие входные и/или выходные отверстия для топлива в отдельных вариантах осуществления изобретения. Поддерживающие кольца 971 (показанные как верхнее поддерживающее кольцо 971а и нижнее поддерживающее кольцо 971b) позиционируются на внутренней стороне бака 960 и могут прикрепляться близко к крышкам 970 смотрового колодца или непосредственно к ним. Разделительные перегородки 964 прикрепляются между верхним поддерживающим кольцом 971а и нижним поддерживающим кольцом 971b и поддерживаются этими кольцами. Соответственно, разделительные перегородки 964 могут включать в себя осевые элементы 972 разделительной перегородки, которые проходят между поддерживающими кольцами 971а и 971b, а также поперечные элементы 973 разделительной перегородки, которые прикрепляются к соседним осевым элементам 972 разделительной перегородки и проходят между ними. Осевые элементы 972 разделительной перегородки могут иметь плоскую форму в виде панели и могут образовывать разделительные перегородки в виде «грейпфрута». В отдельных вариантах осуществления изобретения осевые элементы 972 разделительной перегородки могут прикрепляться только к верхнему поддерживающему кольцу 971а и нижнему поддерживающему кольцу 971b. Поперечные элементы 973 разделительной перегородки также могут иметь плоскую форму в виде панели, и могут располагаться таким образом, чтобы образовывать кольца, позиционируемые внутри внутренней стенки 965 бака 960. Поперечные элементы 973 разделительной перегородки могут прикрепляться только к осевым элементам 972 разделительной перегородки. Соответственно, элементы 972, 973 разделительной перегородки могут уменьшать или предотвращать плескание, не контактируя с внутренней стенки 965 бака 960. Осевые элементы 972 разделительной перегородки и/или поперечные элементы 973 разделительной перегородки могут быть перфорированными, и могут быть образованы из тонких легковесных материалов (например, из подходящего металла).
В отдельном варианте осуществления изобретения разделительные перегородки 964 могут позиционироваться внутри бака за счёт открывания верхней крышки 970а смотрового колодца и опускания оператора во внутренний объём бака 960. Оператор может принимать элементы разделительной перегородки 964 (например, осевые элементы 972 разделительной перегородки и поперечные элементы 973 разделительной перегородки) и прикреплять элементы друг к другу и к поддерживающим кольцам 971а, 971b. В отдельном варианте осуществления изобретения осевые элементы 972 разделительной перегородки могут первоначально включать в себя множество компонентов, например, нижний компонент 972а, промежуточный компонент 972b, и верхний компонент 972с. Эти компоненты 972а-972с могут опускаться отдельно в бак 960 и собираться на своём месте оператором внутри бака. Чтобы предотвратить контакт между оператором и внутренней стенкой 965 бака 960, оператор может поддерживаться с помощью трапецеидальной фермы или другой подходящей платформы, которая подвешивается на портале или другой структуре с наружной стороны бака. В зависимости от размера впускных отверстий в бак 960, определённые компоненты 972а-972с могут быть прикреплены заранее, перед тем как они будут опускаться внутрь бака 960. Например, нижний компонент 972а и верхний компонент 972b могут соединяться вместе в отдельном варианте осуществления изобретения. Если впускное отверстие является достаточно большим, то весь осевой элемент 972 разделительной перегородки может быть опущен в виде блока в бак 960. Поперечные элементы 973 разделительной перегородки могут быть первоначально сегментированы, например, с отдельными сегментами, прикреплёнными между соседними осевыми элементами 973 разделительной перегородки.
Фиг. 11-16 иллюстрируют ракеты-носители и системы ракет-носителей, выполненные в соответствии с дополнительными вариантами осуществления изобретения настоящей технологии. Во многих их этих вариантов осуществления изобретения ракеты-носители включают в себя кольцевые элементы, которые могут облегчать функционирование ракеты-носителя или частей ракеты-носителя в двух направлениях, обычно во время подъёма на орбиту и спуска. Соответственно, эти структуры и взаимодействующие с ними технологии могут использоваться как для запуска, так и при возвращении ракеты-носителя, или его части, или ступени ракеты-носителя в конфигурации посадки на хвост.
Фиг. 11 иллюстрирует систему 1170, которая включает в себя ракету-носитель 1100, выполненную таким образом, чтобы подниматься и опускаться в противоположных направлениях, но в целом с одинаковой ориентацией, например, хвостом вниз. Соответственно, ракета-носитель 1100 может опускаться в первом направлении 1151, а подниматься на орбиту во втором направлении 1152. Ракета-носитель 1100 включает в себя первую ступень 1171 и вторую ступень 1172, которая может перевозить человека и/или другую полезную нагрузку в модуле 1130 для полезной нагрузки. В других вариантах осуществления изобретения ракета-носитель 1100 может иметь более двух ступеней. Ракета-носитель 1100 переносит двигательную установку 1100 в первой ступени 1171, которая в свою очередь направляет выпускные продукты через одно или более сопел 1111, позиционируемых в направлении первого конца 1105 ракеты-носителя 1100. Ракета-носитель 1100 имеет вытянутую форму вдоль оси V ракеты-носителя, а модуль 1130 для полезной нагрузки может позиционироваться в направлении второго конца 1102 ракеты-носителя. Ракета-носитель 1100 может включать в себя заданное место 1178 разделения, в котором первая ступень 1171 отделяется от второй ступени 1172, обычно во время подъёма на орбиту. Ракета-носитель 1100 включает в себя одну или более обращённых наружу внешних поверхностей 1173. Используемый здесь термин «внешняя поверхность» в целом относится к поверхности, которая открывается во внешнее окружение ракеты-носителя. Стабилизаторы, например, первые стабилизаторы 1150а, обеспечивают стабильность ракеты-носителя 1100. Контроллер 1190 управляет функционированием ракеты-носителя 1100 и может располагаться на ракете-носителе 1100 и/или вне ракеты-носителя (например, на воздушной, наземной, морской или космической станции).
Система 1170 может дополнительно включать в себя кольцевой элемент 1180, который используется для того, чтобы стабилизировать и/или контролировать ракету-носитель 1100. Кольцевой элемент 1180 может позиционироваться поблизости от места 1178 разделения между первой ступенью 1171 и второй ступенью 1172. В варианте осуществления изобретения кольцевой элемент 1180 переносится первой ступенью 1171, для того чтобы стабилизировать и/или направлять первую ступень 1171 для приземления с посадкой хвостом вниз, после того как первая ступень 1171 отделилась от второй ступени 1172. Соответственно, положение кольцевого элемента 1180 относительно общей длины ракеты-носителя, от которой оно зависит, является различным, в зависимости от того, прикреплена или отделена вторая ступень 1172. Кольцевой элемент 1180 может включать в себя обращённую внутрь внешнюю поверхность 1184, которая обращена в направлении к оси V ракеты-носителя. Обращённая внутрь внешняя поверхность 1184, аналогично обращённой наружу внешней поверхности 1173, открывается к внешнему окружающему пространству ракеты-носителя 1100, но в целом обращена внутрь в направлении к оси V ракеты-носителя в большей степени, чем наружу в направлении от оси V ракеты-носителя. Кольцевой элемент 1180 может дополнительно включать в себя первую периферийную поверхность 1181, обращённую в первом направлении 1151, и вторую периферийную поверхность 1182, обращённую во втором направлении 1152. В отдельном варианте осуществления изобретения вторая периферийная поверхность 1182 является экранированной или по меньшей мере частично экранированной от потока воздуха, проходящего у ракеты-носителя 1100 во время подъёма на орбиту, например, за счёт позиционирования ниже по ходу потока от второй ступени 1172. В этой конфигурации первая периферийная поверхность 1181 образует заднюю кромку, когда вторая периферийная поверхность 1182 экранируется во время подъёма. После того как вторая ступень 1172 отделилась от ракеты-носителя 1100, а первая ступень 1171 начинает опускаться в первом направлении 1151, первая периферийная поверхность 1181 образует поверхность передней кромки, а неоткрытая вторая периферийная поверхность 1182 образует поверхность задней кромки. Дополнительные детали компоновки, с помощью которых кольцевой элемент 1180 может стабилизировать, также как и управлять ракетой-носителем, описывается далее.
Фиг. 12А является частично боковым видом в вертикальной проекции варианта осуществления изобретения первой ступени 1171, имеющей множество элементов, в целом аналогичных тем, которые описывались выше со ссылкой на фиг. 11, также как и несколько дополнительных признаков. Дополнительные признаки включают в себя вторые стабилизаторы 1150b, которые могут проходить в целом параллельно оси V ракеты-носителя около первого конца 1105 ракеты-носителя. В иллюстрации, показанной на фиг. 12А, вторая ступень 1172 (фиг. 11) отделена от ракеты-носителя 1100. Кольцевой элемент 1180 переносится первой ступенью 1171 через один или более кронштейнов 1183, и может включать в себя один или более развёртываемых элементов 1139. Развёртываемые элементы 1139 могут включать в себя один или более третьих стабилизаторов 1150с и/или один или более аэродинамических тормозов 1140. Третьи стабилизаторы 1150с могут быть развёрнуты, чтобы стабилизировать ракету-носитель 1100, поскольку она перемещается в первом направлении 1151. Тормоза 1140 могут использоваться для замедления спуска ракеты-носителя. В целом третьи стабилизаторы 1150с (и другие аэродинамические поверхности) выравниваются параллельно оси V ракеты-носителя, а тормозные поверхности позиционируются, по меньшей мере частично, поперечно к оси V ракеты-носителя. Любая из развёртываемых поверхностей 1139 может быть развёрнута дифференцированно (например, частично или не совсем), по сравнению с другими развёртываемыми поверхностями, чтобы обеспечивать надлежащее управление.
Фиг. 12В и 12С являются, соответственно, частично верхним и нижним изометрическими видами варианта осуществления изобретения первой ступени 1171, показанной на фиг. 12А. Как показано на фиг. 12В, кольцевой элемент 1180 позиционируется радиально наружу от оси V ракеты-носителя, и также может располагаться радиально снаружи от обращённой наружу внешней поверхности 1173 первой ступени 1171. В этом варианте с удалённой второй ступенью 1172 (фиг. 11) зазор 1185 для воздушного потока или проточный зазор образуется между обращённой внутрь внешней поверхностью 1184 кольцевого элемента 1180 и обращённой наружу внешней поверхностью 1173 первой ступени 1171. Когда ракета-носитель поднимается в первом направлении 1151, воздух проходит через зазор 1185 рядом с кронштейнами 1183. Соответственно, кронштейны 1183 и кольцевой элемент 1180 могут обеспечивать дополнительную стабильность для первой ступени 1171. Поскольку эти поверхности позиционируются в кормовой части вдоль оси ракеты-носителя, когда ракета-носитель спускается вниз, они могут обеспечивать стабильность, которая не может быть достигнута за счёт позиционированных вперёд первого и второго стабилизаторов 1150а и 1150b. Устанавливаемые в кормовой части тормоза 1140 также могут замедлять спуск ракеты-носителя 1100, как обсуждалось выше. В отдельных вариантах осуществления изобретения устанавливаемые в кормовой части тормоза 1140 являются инверсными относительно ориентации развёртываемых поверхностей 140, описанных выше со ссылками на фиг. 1А-3В. Соответственно, тормоза 1140 могут быть наклонены или ориентированы в смежный поток, когда ракета-носитель спускается вниз, чтобы обеспечивать значительное увеличение мощности торможения.
В варианте осуществления изобретения, показанном на фиг. 12В и 12С, первая периферийная поверхность 1181 образует переднюю кромку, а вторая периферийная поверхность 1182 образует заднюю кромку, когда ракета-носитель спускается вниз. В отдельном аспекте этого варианта осуществления изобретения первая периферийная поверхность 1181 может быть заострена или закруглена, чтобы обеспечивать плавный аэродинамический поток во время спуска. В другом аспекте этого варианта осуществления изобретения вторая периферийная поверхность 1182 может быть выполнена с квадратным поперечным сечением или затуплённой (например, быть более затуплённой, чем первая периферийная поверхность 1181). Тупоносая задняя кромка, которая определяется второй периферийной поверхностью 1182, в этой конфигурации может предусматривать предсказуемое положение, в котором поток отделяется от кольцевого элемента 1180 на углах атаки при подъёме на орбиту, таким образом, уменьшая вероятность того, что аэродинамические силы на кольцевом элементе 1180 значительно смещаются в результате изменения мест разделения при высоких углах атаки. В то же время затуплённая вторая периферийная поверхность 1182 может производить большее сопротивление среды во время подъёма на орбиту, по сравнению с гладкой периферийной поверхностью, при этом ожидается, что эта проблема перевешивается описанными выше преимуществами. Кроме того, за счёт уменьшения аэродинамической подъёмной силы затуплённая вторая периферийная поверхность 1182 может уменьшать вероятность смещения аэродинамических сил во время подъёма на орбиту, например в условиях поперечного ветра.
Фиг. 12С является изометрическим видом сверху первой ступени 1171, показанной на фиг. 12В, иллюстрирующей выполненную с квадратным поперечным сечением или иным способом затуплённую вторую периферийную поверхность 1182. Фиг. 12С также дополнительно иллюстрирует обращённую внутрь внешнюю поверхность 1184 кольцевого элемента 1180. Третьи стабилизаторы 1150с, показанные на фиг. 12С, полностью развёрнуты. Как дополнительно обсуждается в дальнейшем, со ссылкой на фиг. 13, третьи стабилизаторы 1150с могут быть развёрнуты частично, чтобы обеспечивать более активное динамическое управление ракетой-носителем.
Как показано на фиг. 13, каждый из третьих стабилизаторов 1150с может позиционироваться с возможностью перемещения в кожухе 1153 стабилизатора, который проходит внутрь, в направлении к оси V ракеты-носителя (фиг. 12В). Развёртывание третьего стабилизатора 1150с может изменить центр давления ракеты-носителя во время спуска, и таким образом изменить стабильность и манёвренность ракеты-носителя во время спуска. Каждый кожух 1153 стабилизатора может совмещаться с соответствующим кронштейном 1183 (фиг. 12С) таким образом, что третьи стабилизаторы 1150с размещаются внутри кронштейнов 1183, когда они в сложенном состоянии. Эта компоновка может уменьшать или устранять любое дополнительное сопротивление среды, взаимосвязанное с приводным механизмом для перемещения третьих стабилизаторов 1150с. Кожух 1153 стабилизатора может дополнительно включать в себя приводной механизм 1154, который приводит в действие третий стабилизатор 1150с и переводит его из сложенного положения в одно или более развёртываемых положений. В иллюстративном варианте осуществления изобретения третий стабилизатор 1150с может разворачиваться в одно из трёх заданных положений, обозначенных как D1, D2, и D3. Третий стабилизатор 1150с может развёртываться в любое промежуточное положение, также как и обеспечивать точно управляемые силы для управления направлением перемещения ракеты-носителя, в котором установлен этот стабилизатор. В другом варианте осуществления изобретения третий стабилизатор 1150с может развёртываться в большее количество положений или развёртываться непрерывно между различными полностью развёртываемыми и сложенными положениями. Аналогичная компоновка может быть использована для дифференцированного развёртывания тормозов 1140 (фиг. 12С) в добавление к или вместо дифференцированного развёртывания третьих стабилизаторов.
Фиг. 14 является частично изометрической иллюстрацией на виде снизу ракеты-носителя 1400, имеющей кольцевой элемент 1480, выполненный в соответствии с ещё одним вариантом осуществления изобретения настоящей технологии. Ракета-носитель 1400 может включать в себя первую ступень 1471, прикрепляемую с возможностью удаления ко второй ступени 1472 в заданном месте 1478 разделения. Ракета-носитель 1400 дополнительно включает в себя одно или более сопел 1411, позиционируемых в направлении первого конца 1405 ракеты-носителя, и модуль 1430 полезной нагрузки, позиционируемый в направлении второго конца 1402b второй ступени 1472. Кольцевой элемент 1480 позиционируется между осевыми концами ракеты-носителя, по меньшей мере, когда первая и вторая ступени 1471, 1472 соединяются. Во время подъёма на орбиту второй конец 1402а второй ступени 1472 образует второй конец всей ракеты-носителя, а после того как вторая ступень 1472 отделилась от первой ступени 1471, второй конец 1402b первой ступени 1471 образует второй конец ракеты-носителя, когда первая ступень 1471 спускается вниз. Соответственно, кольцевой элемент может иметь первое положение относительно первой общей длины ракеты-носителя, когда первая и вторая ступени соединены вместе, и второе положение относительно второй общей длины ракеты-носителя (например, только первая ступень 1471), которое отличается от первого положения, когда первая и вторая ступени разделены, даже, несмотря на то, что кольцевой элемент может иметь единственное фиксированное положение относительно первой ступени 1471, независимо от того, прикреплена первая ступень ко второй ступени 1472, или отделена от неё. В отличие от описанной выше компоновки со ссылками на фиг. 11-12С, вторая ступень 1472 может иметь меньший диаметр, чем диаметр первой ступени 1471. Соответственно, вторая периферийная поверхность 1482 кольцевого элемента 1480 открывается для внешнего потока, как во время подъёма на орбиту, так и во время спуска ракеты-носителя. Во время подъёма на орбиту воздух протекает через зазор 1485 для воздушного потока или проточный зазор между кольцевым элементом 1480 и остальной частью ракеты-носителя 1400 в первом направлении 1151. Во время спуска воздух протекает в противоположном направлении 1152 через тот же самый зазор 1485.
В отдельных вариантах осуществления изобретения первая ступень 1471 может иметь затуплённый или плоский участок на втором конце 1402b. Дополнительные детали вариантов осуществления изобретения этого признака описываются в дальнейшем со ссылками на фиг. 15 и 16.
Фиг. 15 является частично боковым видом части первой ступени 1571 ракеты-носителя, имеющей второй конец 1502 с закрывающей поверхностью 1575, выполненной в соответствии с вариантом осуществления изобретения. Традиционные ракеты-носители этого типа часто включают в себя коническую закрывающую поверхность 1574, как обозначено пунктирными линиями на фиг. 15. Если такая традиционная ракета-носитель спускается хвостом вперёд, то воздушный поток вокруг конической поверхности 1574 в целом протекает по траекториям потока, обозначенным стрелками А. Один из потенциальных недостатков такой поверхности заключается в том, что когда угол атаки ракеты-носителя изменяется во время спуска, точка, в которой потоки отделяются от конической поверхности, может чрезвычайно сильно измениться. Это в свою очередь может вызвать значительное смещение и потенциально дестабилизирующие силы на втором конце 1502 первой ступени 1571. Соответственно, вариант осуществления изобретения настоящей технологии включает в себя закрывающую поверхность 1575, имеющую плоский или в противном случае менее изогнутый участок 1576. В отдельных вариантах осуществления изобретения закрывающая поверхность 1575 включает в себя первый проходящий в окружном направлении участок 1578а, который (в поперечном сечении) имеет контур, являющийся плоским, или который имеет первую кривизну, и второй проходящий в окружном направлении участок 1578b, позиционируемый радиально внутрь от первого проходящего в окружном направлении участка и имеющий контур, который является плоским или имеет вторую кривизну, а также третий проходящий в окружном направлении участок 1578с, позиционируемый между первым и вторым проходящими в окружном направлении участками 1578а, 1578b. Третья проходящая в окружном направлении поверхность 1578с может иметь третью большую кривизну (например, меньший радиус), чем первая кривизна и большую, чем вторая кривизна. Другими словами, третий участок 1578с является более изогнутым, чем первый и второй участки 1578а, 1578b. Фраза «более изогнутый» используется в этом описании как общее выражение и включает в себя контуры с любой кривизной по сравнению с плоским контуром.
В отдельных вариантах осуществления изобретения третья проходящая в окружном направлении поверхность 1578с образует тормоз или край 1577. Эти тормоз или край 1577 (или другая форма для третьей, проходящей в окружном направлении поверхности 1578с) может проходить по окружность вокруг оси V ракеты-носителя и может обеспечивать фиксированное, предсказуемое положение, в котором поток отделяется от второго конца 1502. Такое отделение обозначается стрелками S. Кроме того, сопротивление среды, появляющееся в результате этого суживающегося хвостового участка на первой ступени 1571 во время спуска хвостом вперёд, может дополнительно замедлять спуск первой ступени. В результате, другие силы, требуемые для дополнительного замедления первой ступени 1571 (например, тяга ракетного двигателя), могут быть уменьшены.
Фиг. 16 показывает вариант осуществления изобретения первой ступени 1571, описанный выше со ссылкой на фиг. 15, в соединении со второй ступенью 1572 и кольцевым элементом 1680. В отдельном аспекте этого варианта осуществления изобретения вторая ступень 1572 включает в себя отсек для экипажа, который в свою очередь, включает в себя сопло 1611 второй ступени, расположенное таким образом, чтобы обеспечивать функцию аварийного покидания объекта для экипажа, транспортируемого во второй ступени 1572. В частности, сопло 1611 второй ступени может быть активировано в случае аварийной ситуации, чтобы направить вторую ступень 1572 в сторону от первой ступени 1571. Кольцевой элемент 1680 может включать в себя открытую, обращённую внутрь поверхность 1684, заострённую или изогнутую первую периферийную поверхность 1681, и затуплённую или с квадратным поперечным сечением вторую периферийную поверхность 1682.
Одним из признаков плоского участка 1576 закрывающей поверхности 1575 является то, что она может направлять выхлопные газы из сопла 1611 второй ступени таким образом, чтобы улучшить способность второй ступени 1572 отделиться от первой ступени 1571. В частности, если закрывающая поверхность 1575 имела бы коническую форму (которая обозначалась как коническая поверхность 1574, описанная выше со ссылкой на фиг. 15), то поток, выходящий из сопла 1611 второй ступени мог бы ускоряться, проходя через зазор 1685 (например, зазор для воздушного потока или проточный зазор) между кольцевым элементом 1680 и первой ступенью 1571, приводя к тому, что вторая ступень 1572 должна притягиваться в направлении к первой ступени 1571 в большей степени, чем отталкиваться от неё. Плоский участок 1576 (или другой участок, который не так сильно изогнут, как коническая поверхность 1574, показанная на фиг. 15), может направлять поток и/или обеспечивать большую осевую реактивную силу на первую ступень 1571, для того чтобы более рационально направлять первую и вторую ступени 1571, 1572 в направлении друг от друга.
Вышеописанные компоновки, показанные на фиг. 11-14С и 16 состоят в том, что вторая ступень, в комбинации с кольцевым элементом, может обеспечивать дополнительные системные преимущества, которые могут получиться в результате компоновки второй ступени и кольцевого элемента. Например, по меньшей мере некоторые традиционные границы раздела между первой и второй ступенью ракеты включают в себя открытую в направлении вверх область в виде сосуда в верхней части первой ступени, в которой устанавливается сопло второй ступени. Вследствие того, что эта область перевёртывается, когда запускается ракетный двигатель второй ступени, это может вызвать очень высокие давления внутри этой области, и/или очень высокие усилия на вторую ступень. Чтобы избежать такого результата, традиционные конструкции обычно включают в себя пружинную систему или другой исполнительный механизм, который толкает первую и вторую ступени друг от друга перед тем, как запустится ракетный двигатель второй ступени. Отделение также обычно производится вне атмосферы Земли, чтобы избежать атмосферных эффектов. В отличие от этих традиционных компоновок, варианты осуществления изобретения описанного выше кольцевого элемента могут обеспечивать вентилируемую область, в которой устанавливается сопло второй ступени, как показано на фиг. 16. В результате система не требует использования пружины или другого исполнительного механизма для разделения ступеней перед тем как запустится ракетный двигатель второй ступени, что уменьшает вес системы. Кроме того, кольцевой элемент также может увеличивать общее давление, отталкивающее две ступени друг от друга (например, потому что плоский участок 1576 принимает большую осевую тягу, чем в том случае, если бы он был коническим), в то же время, уменьшая пиковую силу (за счёт вентиляции). Понижение пиковой силы, в свою очередь, уменьшает ударное воздействие на космонавтов и/или груз, перевозимый второй ступенью.
Вышеописанная компоновка также может быть расширена окном, во время которого происходит разделение. В частности, эта компоновка может увеличивать предсказуемость тяги реактивного двигателя принудительного разделения, которое может предусматривать разделение на более низких высотах, включая в себя разделение внутри земной атмосферы, таким образом, уменьшая потенциальные колебания воздушного потока. Вместо этого системные компоненты могут создавать поведение с хорошей повторяемостью, даже в изменяющихся атмосферных условиях. В частности, динамические эффекты текучей среды этой компоновки проявляются таким образом, чтобы масштабировать их более предсказуемым образом (делая испытания мелкого масштаба более точными), и являются более предсказуемыми в полномасштабной операции. Соответственно, эта компоновка может быть особенно подходящей для аварийного спасательного манёвра для экипажа (который может произойти в атмосфере), но без необходимости наличия спасательной капсулы отделяемого типа, например такой, которая была использована для системы «Аполлон». Такие спасательные капсулы должны быть сброшены в нормальном полёте, который может включать в себя риск безопасности полёта, при этом такие капсулы не являются повторно используемыми.
Исходя из вышеописанного следует принимать во внимание, что специфические варианты осуществления изобретения раскрываемой технологии были описаны здесь с целью иллюстрации, но эта технология также может включать в себя другие варианты осуществления изобретения. Например, развёртываемые поверхности 140 могут иметь створки 141 с формами и/или компоновками, которые отличаются от тех, которые были показаны и описаны выше. В другом примере дополнительные признаки топливного бака может быть интегрированы с ракетой-носителем. Например, по меньшей мере, часть внешней поверхности ракеты-носителя может быть образована за счёт внешней поверхности топливного бака. Кольцевому элементу может придаваться такая форма, как полное кольцо, охватывающее ракету-носитель, или в других вариантах осуществления изобретения один или более кольцевых элементов могут проходить только вокруг части или частей ракеты-носителя. В отдельных вариантах осуществления изобретения кольцевой элемент фиксируется относительно ракеты-носителя (например, фиксируется относительно первой ступени ракеты-носителя), а в других вариантах осуществления изобретения он может перемещаться относительно части ракеты-носителя, от которого он зависит. Например, кольцевой элемент может скользить в осевом направлении между множеством положений. Третьи стабилизаторы 1150с были описаны в отдельных вариантах осуществления изобретения как развёртываемые. В других вариантах осуществления изобретения третьи стабилизаторы 1150с могут фиксироваться, например, фиксироваться относительно кольцевого элемента 1180. Закрывающая поверхность может иметь центральный участок с плоской формой или другой формой, которая обеспечивает значительно более плоский профиль над центральным участком закрывающей поверхности и/или имеет более высокую степень кривизны при изменении направления плоскости или во внутреннем, или в наружном направлении от этого изменения. Кольцевые элементы, описанные выше со ссылками на фиг. 11-16, могут комбинироваться с поверхностями раструба, описанными выше со ссылками на фиг. 1А-6В, и/или топливными баками и взаимодействующими формами ракеты-носителя, описанными выше со ссылками на фиг. 7-10.
Определённые аспекты изобретения, описанные в контексте отдельных вариантов осуществления изобретения, могут комбинироваться или удаляться в других вариантах осуществления изобретения. Например, конусообразный топливный бак, описанный выше со ссылками на фиг. 9 и 10, может комбинироваться с любой из раскрываемых конусообразных внешних поверхностей ракеты-носителя, и/или конусообразные внешние поверхности могут комбинироваться с любой из развёртываемых тормозящих поверхностей, описанных выше. Кроме того, в то время как преимущества, связанные с определёнными вариантами осуществления изобретения, описаны в контексте с этими вариантами осуществления изобретения, другие варианты также могут проявить такие преимущества, и не всем вариантам осуществления изобретения обязательно необходимо проявлять такие преимущества, чтобы они попадали в объём изобретения. Соответственно, изобретение может охватывать другие варианты осуществления изобретения, определённо не показанные или описанные здесь.
Реферат
Группа изобретений относится к ракетам-носителям (РН) со спасаемыми (многоразовыми) ступенями. Ступень (1171) РН (например, первая) снабжена соплом (1111) и имеет внешнюю поверхность (1173) с первым (1150а) и вторым (1150b) типами стабилизаторов, эффективными при подъёме РН (в направлении 1152). Третий тип (1150с), используемый при спуске (в направлении 1151), установлен на кольцевом элементе (1180). Последний зафиксирован на пилонах (1183) снаружи ступени и имеет переднюю (1181) и заднюю (1182) кромки (при подъёме РН). При спуске ступени (1171) кромки меняются ролями. Для замедления спуска в кормовой части кольцевого элемента имеются раскрываемые тормоза (1140), которые могут быть инверсными и/или дифференциально отклоняемыми. Кольцевой элемент (1180) с пилонами (1183) участвует в аэродинамической стабилизации ступени РН как при подъёме, так и при спуске, а также улучшает условия разделения ступеней РН. Технический результат направлен на совершенствование многоразовых систем РН. 7 н. и 42 з.п. ф-лы, 30 ил.
Комментарии