Система детонации для инициирования детонирующего материала - RU2189559C2
Код документа: RU2189559C2
Чертежи









Описание
Область применения изобретения
Изобретение касается
системы детонации, управляемой с помощью электромагнитной индукции для инициирования детонирующего материала, в частности, но не исключительно, для неконтактного инициирования
детонирующего материала
в шпуре.
Предшествующий уровень техники
Во всем этом описании и в формуле изобретения термин "детонирующий материал" используется в широком и
обобщенном смысле для описания
любого инициирующего устройства, такого как электрический детонатор, взрыватель, мостик накаливания, электрозапал, а также любой энергетический (обладающий большой
энергией) материал, такой как
взрывчатое вещество, движущее вещество и т.п.
Взрывчатые вещества и движущие вещества используются в горной промышленности и строительстве для многообразных приложений, включая прокладку туннелей, выемку, земляные работы в строительстве и дробление валунов.
Чтобы инициировать взрывчатое вещество или движущее вещество, требуется детонатор или взрыватель определенного типа. В свою очередь, детонатор или взрыватель можно инициировать электрическим или механическим способом. Настоящее изобретение относится к беспроводному электрическому инициированию детонатора или взрывателя либо другого энергетического материала.
Наиболее распространенным способом инициирования электрического детонатора или взрывателя является использование физического проводника, такого как пара проводов, подсоединенная с одной стороны к детонатору и с противоположной стороны к источнику электропитания через переключатель. При замыкании этого переключателя ток проходит через провода, инициируя детонатор или взрыватель.
При использовании электрической системы подобного типа инициирование может произойти преждевременно или случайно из-за индукции электрического тока в проводниках при воздействии электромагнитных полей рассеяния или из-за неисправностей в электрической цепи инициирования, состоящей из проводов, переключателя и источника питания.
Существует другая система электрического инициирования под фирменным названием Magne-Det, в которой пара электрических проводников, подсоединенных к детонатору, проходит внутри обмотки, через которую пропускается ток. Ток, пропускаемый через обмотку, индуцирует ток, который проходит через проводники и используется как ток детонации. Однако ясно, что эта система также может быть случайно или преждевременно активизирована из-за воздействия электромагнитных полей рассеяния.
Для всех этих систем инициирования требуется ручное подсоединение детонатора к источнику энергии инициирования.
Краткое описание изобретения
Задачей настоящего изобретения является
обеспечение системы детонации, в которой
существенно снижена вероятность случайного инициирования детонирующего материала. Еще одной задачей настоящего изобретения является обеспечение системы
беспроводного неконтактного инициирования
детонирующего материала.
Согласно первому аспекту настоящего изобретения представлена система детонации, управляемая с помощью
электромагнитной индукции для инициирования детонирующего
материала, причем данная система включает:
автоматизированный радиоуправляемый зарядный модуль (ARCH-модуль) для подачи
электрического тока детонации к детонирующему материалу, причем
указанный ARCH-модуль не имеет постоянного собственного источника питания и содержит силовую цепь для получения мощности с помощью
средства электромагнитной индукции от электромагнитного поля,
генерируемого на расстоянии от ARCH-модуля, причем данная силовая цепь обеспечивает рабочую мощность для ARCH-модуля и электрический ток
детонации, а также содержит средства приема и декодирования
передаваемых на радио управляющих сигналов, включая код FIRE (детонация), при верифицированном приеме которого ARCH-модуль подает указанный
ток на детонирующий материал и, тем самым, инициирует этот
материал.
Предпочтительно средства приема и декодирования управляющего сигнала получают этот управляющий сигнал от указанного электромагнитного поля.
Предпочтительно указанный управляющий сигнал содержит код ARM (запуск) и средства приема и декодирования, причем после приема, декодирования и верификации указанного кода ARM в указанном ARCH-модуле инициируется таймер для отсчета заранее определенного периода времени, в течение которого вышеупомянутый ARCH-модуль должен получить, декодировать и верифицировать указанный код FIRE для подачи указанного тока детонации на детонирующий материал, а при отсутствии этого кода указанный ARCH-модуль автоматически отключается на второй заранее определенный период.
Предпочтительно указанный ARCH-модуль дополнительно включает в себя выходной переключатель, через который указанный ток детонации должен пройти для инициирования детонирующего материала, причем указанный переключатель сконфигурирован с обеспечением прохождения тока через цепь короткого замыкания пока не произойдет прием и верификация кода FIRE, после чего в указанном переключателе происходит размыкание указанной цепи короткого замыкания для подачи тока детонации к детонирующему материалу.
Предпочтительно указанная система дополнительно включает в себя блок преобразователя, содержащий источник питания для электромагнитного поля, средство генерирования электромагнитного поля и радиопередающее средств для радиопередачи указанных управляющих сигналов на ARCH-модуль.
Предпочтительно указанный блок преобразователя дополнительно содержит средство для наложения указанных управляющих сигналов на указанное электромагнитное поле, чтобы указанное радиопередающее средство (приемопередатчик) передавало на указанный ARCH-модуль как указанное электромагнитное поле, так и указанные управляющие сигналы.
Предпочтительно указанный преобразователь содержит переключатель режимов работы между режимами LOCAL (локальный) и REMOTE (дистанционный), где при указанном режиме работы LOCAL пользователь может вручную вводить команды на указанный блок преобразователя (преобразователь) для радиопередачи на указанный ARCH-модуль, а при указанном режиме работы REMOTE пользователь может вводить команды на указанный преобразователь через дистанционный блок контроллера.
Предпочтительно указанный преобразователь содержит устройство для ручного ввода команд, а также средство таймера (таймер), причем оба этих средства связаны с вышеупомянутым переключателем режимов, и при переключении в режим LOCAL пользователь должен ввести через указанное устройство ввода достоверный идентификационный номер, распознаваемый указанным преобразователем, в течение заранее определенного периода времени, который отсчитывается указанным таймером, чтобы указанный преобразователь обрабатывал последующие команды пользователя, а в отсутствие ввода правильного идентификационного номера в течение указанного периода времени указанный преобразователь автоматически отключается так, чтобы не воспринимать команды пользователя в течение второго периода времени, отсчитываемого указанным таймером.
Предпочтительно указанный преобразователь содержит переключатель ARM (запуск), который может работать, если указанный преобразователь находится в режиме LOCAL, и после активизации этого переключателя средство генерирования электрического поля генерирует электромагнитное поле.
Предпочтительно указанный преобразователь содержит переключатель FIRE (детонация), который может работать, если указанный преобразователь находится в режиме LOCAL, и при активизации этого переключателя в течение заранее определенного периода времени после активизации переключателя ARM преобразователь передает код FIRE на ARCH-модуль.
Предпочтительно указанная система дополнительно включает забойный стержень для забойки шпура, в котором можно поместить указанные ARCH-модуль и детонатор, где указанный преобразователь содержит обмотку для генерации указанного электромагнитного поля, причем указанная обмотка установлена на данном забойном стержне или внутри него, чтобы линии магнитного потока проходили через стержень на силовую цепь для передачи рабочей мощности на ARCH-модуль посредством электромагнитной индукции.
Выгодно применять забойный стержень многократного использования.
Предпочтительно указанная система дополнительно включает дистанционный блок контроллера, с помощью которого пользователь может передавать команды на указанный преобразователь из точки, удаленной от указанного преобразователя.
Предпочтительно указанный блок контроллера (контроллер) содержит средство для ручного ввода команд, с помощью которого пользователь должен ввести достоверный идентификационный номер в течение заранее определенного периода времени, чтобы указанный дистанционный контроллер установил канал радиосвязи с указанным преобразователем. Однако в альтернативном варианте реализации изобретения управление дистанционным контроллером может осуществляться с помощью клавишного переключателя.
Предпочтительно указанный дистанционный контроллер включает средство процессора (процессор) для генерирования уникального идентификационного кодового слова, которое непрерывно передается, пока от указанного преобразователя не будет получен сигнал подтверждения приема, соответствующий указанному идентификационному кодовому слову, а в случае отсутствия указанного сигнала подтверждения в течение заранее определенного периода времени указанный дистанционный контроллер переходит в режим RESET (сброс), при котором пользователь должен еще раз ввести достоверный идентификационный номер для повторного инициирования канала радиосвязи с указанным преобразователем. Предпочтительно указанный дистанционный контроллер дополнительно содержит переключатель ARM, при активизации которого в случае действующего канала радиосвязи с указанным преобразователем дистанционный контроллер передает на преобразователь код ARM, при получении которого указанный преобразователь генерирует указанное электромагнитное поле. Однако в альтернативном варианте реализации изобретения дистанционный контроллер может быть подсоединен к преобразователю проводами.
Предпочтительно код ARM, передаваемый указанным дистанционным контроллером на указанный преобразователь, отличается от кода ARM, передаваемого указанным преобразователем на указанный ARCH-модуль.
Предпочтительно указанный преобразователь передает сигнал подтверждения указанному дистанционному контроллеру по получении кода ARM, и после этого указанный преобразователь инициирует свой таймер для отсчета первого периода, в течение которого он должен получить код FIRE от указанного дистанционного контроллера, а в случае неполучения указанного кода FIRE в течение указанного первого периода указанный преобразователь автоматически отключается на второй период времени.
Предпочтительно указанный дистанционный блок управления содержит переключатель FIRE, и при активизации этого переключателя дистанционный блок управления передает код FIRE на указанный преобразователь, который, в свою очередь, после верифицированного приема этого кода передает код FIRE на указанный ARCH-модуль.
Предпочтительно код FIRE, передаваемый дистанционным контроллером на преобразователь, отличается от кода FIRE, передаваемого преобразователем на ARCH-модуль.
Согласно еще одному аспекту настоящего изобретения
представлена система детонации, управляемая с помощью электромагнитной
индукции для неконтактного инициирования детонирующего материала в шпуре, причем указанная система содержит:
автоматизированный радиоуправляемый зарядный модуль (ARCH-модуль), подсоединенный
к детонирующему материалу и помещенный в шпуре, образованном в твердом материале, причем данный ARCH-модуль не имеет
постоянного собственного источника питания, но содержит силовую цепь для получения
с помощью электромагнитной индукции рабочей мощности от дистанционно генерируемого электромагнитного поля, причем
данная силовая цепь обеспечивает рабочую мощность для ARCH-модуля, чтобы генерировать
ток детонации, который подается на детонирующий материал, а также средства для приема и декодирования
передаваемых радиоуправляющих сигналов, включая код FIRE, при верифицированном приеме которого
происходит подача тока детонации на детонирующий материал;
забойный стержень для забойки шпура,
в который помещают энерговыделяющий материал и ARCH-модуль; и
преобразователь для
радиопередачи указанных управляющих сигналов, причем указанный преобразователь содержит обмотку для
генерирования электромагнитного поля и эта обмотка установлена на забойном стержне или внутри него,
чтобы способствовать передаче рабочей мощности на ARCH-модуль посредством электромагнитной
индукции.
Краткое описание чертежей
Ниже дается описание одной из реализаций
настоящего изобретения посредством примера со ссылкой на прилагаемые чертежи:
на фиг. 1
схематически представлена одна из реализаций системы детонации, управляемой с помощью электромагнитной
индукции для инициирования энергетического вещества;
на фиг. 2 - блок-схема
дистанционного контроллера данной системы;
на фиг. 3 - блок-схема блока преобразователя данной системы;
на фиг. 4 - блок-схема автоматизированного радиоуправляемого зарядного модуля
(ARCH-модуля) данной системы;
на фиг. 5, 6 и 7 в объединенном виде показана диаграмма состояний, которая
описывает работу дистанционного контроллера, показанного на фиг. 2;
на фиг.
8, 9 и 10 в объединенном виде показана диаграмма состояний, которая описывает работу преобразователя, показанного
на фиг. 3; и
на фиг. 11 - блок-схема второго варианта реализации
преобразователя и дистанционного контроллера.
Подробное описание предпочтительных вариантов реализации
изобретения
На фиг. 1 видно, что одна из реализаций системы детонации,
управляемой с помощью электромагнитной индукции (10), содержит следующие отдельные, но взаимодействующие друг с другом
компоненты: дистанционный контроллер 12, блок преобразователя 14, забойный
стержень 16 и автоматизированный радиоуправляемый зарядный модуль (ARCH-модуль) 18, хотя очевидно, что не все эти компоненты
являются обязательными в каждой реализации настоящего изобретения.
Если система 10 используется для удаления на месте или дробления валуна 22, то сначала сверлится шпур (отверстие) 20 в валуне 22. ARCH-модуль 18 вместе с детонатором 24 проталкивается вниз шпура 20 с помощью забойного стержня 16. ARCH-модуль 18 обычно отделен от ближайшего конца забойного стержня посредством воздушного зазора 26. Тем самым ARCH-модуль 18 физически отделяется от забойного стержня 16. Забойный стержень 16 имеет такую длину, чтобы его конец 28, находящийся с противоположной стороны от ARCH-модуля 18, выходил наружу из шпура 20. Рядом с концом 28 находится преобразователь 14 или, по крайней мере, обмотка/антенна преобразователя 14.
Дистанционный контроллер 12 может находиться в любом месте в пределах приема радиосигналов преобразователем 14. В общих чертах дистанционный контроллер 12 действует таким образом, чтобы передавать команды на преобразователь 14, который, в свою очередь, передает команды и рабочую мощность на ARCH-модуль 18 из точки, удаленной от ARCH-модуля 18, для последующего инициирования детонатора 24. Передаваемые команды содержат коды ARM (запуск) и FIRE (детонация). Преобразователь 14 при получении кода ARM действует таким образом, чтобы генерировать электромагнитное поле и передать код ARM (обычно в другом формате, например, ARM-1) на ARCH-модуль 18. Более выгодным по сравнению с другими способами является наложение сигнала ARM-1 на данное электромагнитное поле. Затем преобразователь 14 переходит в режим ожидания кода FIRE от дистанционного контроллера 12. Если код FIRE поступает в течение заранее определенного периода времени, то он ретранслируется в другом формате, например, FIRE-1, на ARCH-модуль 18 путем наложения на индуцированное электромагнитное поле.
ARCH-модуль 18 не имеет собственного источника питания и не подсоединен проводами к какому-либо постоянному источнику питания. Вместо этого, как будет подробно описано ниже, ARCH-модуль содержит схемы для получения собственной рабочей мощности из электромагнитного поля, генерируемого на расстоянии преобразователем 14. Кроме того, ARCH-модуль 18 после приема и внутренней верификации и проверки кодов ARM-1 и FIRE-1, полученных от преобразователя 14, может затем выработать и передать электрический ток детонации на детонатор 24.
На фиг. 2 дистанционный контроллер 12 содержит клавиатуру и интерфейс 30, с помощью которых можно вводить информацию и команды. Сигналы могут передаваться между блоком 30 клавиатуры и интерфейса на микроконтроллер 32 через коммуникационную шину 34. Микроконтроллер, в свою очередь, может взаимодействовать с ЧМн-приемопередатчиком и антенной 36 через коммуникационную шину 38. Ток от перезаряжаемой батареи 40 подается в цепь 42 электропитания, которая подает рабочий ток на клавиатуру 30, микроконтроллер 32 и ЧМн-приемопередатчик 36 через шину электропитания 44.
Аппаратные компоненты контроллера 12, а именно клавиатура 30, микроконтроллер 32, ЧМн-приемопередатчик и антенна 36, а также цепь 42 электропитания являются либо стандартными готовыми компонентами, либо конструируются в соответствии с обычной практикой проектирования аппаратных средств. Учитывая это, микроконтроллер 32 включает в себя микропроцессор, содержащий как память с произвольным доступом (RAM-память), так и постоянную память (ROM-память), дешифратор (декодер) адреса и т.д. Конкретные функциональные возможности дистанционного контроллера 12 определяются его специализированным программным обеспечением.
Способ действия дистанционного контроллера 12 представлен на диаграммах состояний фиг. 5, 6 и 7. Конкретно на фиг. 5 представлена процедура POWER-UP (включение) для дистанционного контроллера 12. Состояние 300 указывает начало процедуры POWER-UP. Состояние 302 указывает, что на дистанционном контроллере 12 включено питание. Это обычно происходит при нажатии переключателя ON/OFF (вкл./выкл.) (не показан). После включения питания в состоянии 302 происходит загрузка микроконтроллера 32 (состояние 304). Далее в состоянии 306 происходит проверка функционирования светодиодов (СИД). Этот шаг включает последовательное выполнение подпроцедуры 308 для проверки индикаторов СИД, указывающих различные условия или состояния. Проверяются следующие условия и состояния: состояние POWER (питание) 310, указывающее, что на дистанционном контроллере работает источник питания; состояние LINK (канал связи) 312, указывающее, что между дистанционным контроллером 12 и преобразователем 14 установлен канал радиосвязи; состояние ARM (запуск) 314, указывающее на запуск ARCH-модуля 18; состояние FIRE (детонация) 316, указывающее, что дистанционным контроллером 12 через преобразователь 14 на ARCH-модуль 18 передан код FIRE; состояние FAULT (сбой) 318, указывающее на какой-либо отказ в системе 10; и состояние READY (готовность) 320, указывающее, что дистанционный контроллер 12 готов принимать команды, передаваемые с помощью клавиатуры и интерфейса 30.
Следующее состояние в процедуре POWER-UP, это LOOP BACK FSK (кольцевая проверка ЧМн), - состояние 322. В этом состоянии дистанционный контроллер 12 вынуждает свой ЧМн-приемопередатчик генерировать на шаге 324 тестовое сообщение, которое закольцовывается и проверяется на правильность кодирования и декодирования ЧМн-сигналов, передаваемых дистанционным контроллером 12. Если при этом тесте не обнаруживается никаких сбоев, то дистанционный контроллер 12 переходит в состояние READY (готовность) 326, которое сопровождается подсветкой СИД READY на дистанционном контроллере. В этом состоянии дистанционный контроллер просто ожидает ввода следующей команды через клавиатуру и интерфейс 30.
В соответствии с фиг. 6 дистанционный контроллер входит в процедуру ESTABLISH LINK (установить канал связи) после нажатия клавиши LINK на клавиатуре 30, что указывается состоянием 328. Назначение процедуры ESTABLISH LINK - создание канала радиосвязи с преобразователем 14. Нажатие клавиши LINK на клавиатуре 30 распознается и обрабатывается подпрограммой 330, которая передает контроллеру 32 на шаге 332 команду опроса клавиатуры 30 на шаге 334 для чтения кода нажатой клавиши. В случае нажатия клавиши LINK соответствующий код LINK считывается из блока памяти микроконтроллера 32 в состоянии 336 и затем используется для частотной модуляции в генераторе с целью получения ЧМн-сигнала, который передается шиной 38 на приемопередатчик 36.
Приемопередатчик 36 включается в состоянии 338, и код LINK передается на шаге 340 передатчиком 36 на модуль преобразователя 14. В случае приема кода LINK преобразователем 14 и правильном декодировании этого кода преобразователь 14 передает в обратном направлении на дистанционный контроллер 12 код подтверждения приема (АСК BACK), как это указано на шаге 342. Код АСК BACK затем обрабатывается на шаге 344, и различные тестовые сообщения генерируются на шаге 344, указывая результаты проверки. Если связь между дистанционным контроллером 12 и приемопередатчиком функционирует с заранее заданной степенью надежности, то происходит создание канала радиосвязи, как это указано состоянием 348.
После создания канала радиосвязи дистанционный контроллер 12 с помощью процедуры 350 опрашивает клавиатуру 30, чтобы определить, нажата ли клавиша ARM, и на шаге 352 выполняет запуск таймера. Таймер отсчитывает период, заданный на шаге 354, который можно изменять, но в данном случае он задан как номинальный период длительностью 10 секунд. Дистанционный контроллер 12 остается в состоянии 350 опроса клавиатуры до истечения периода, заданного в состоянии 354. Если клавиша ARM не нажата в течение этого периода, то происходит разъединение канала радиосвязи с преобразователем 14 и в состоянии 356 инициируется таймер блокировки, который блокирует повторное создание канала радиосвязи с преобразователем 14 в течение заранее заданного периода времени, например, пять минут. Если в течение периода, заданного в состоянии 354, происходит нажатие клавиши ARM, то происходит вход в процедуру ARM, показанную на фиг. 7.
В состоянии 358 показано нажатие/активизация клавиши ARM. Нажатие клавиши ARM обнаруживается микроконтроллером 12, опрашивающим клавиатуру в состоянии 360, считывающим код нажатой клавиши в состоянии 362, и если это клавиша ARM, то микроконтроллер 32 в состоянии 364 считывает код ARM из своей памяти. Этот код преобразуется в ЧМн-сигнал для последующей передачи. В состоянии 366 микроконтроллер 32 просто проверяет, что приемопередатчик 36 включен (ON) и исправен (ОК). Если это так, то ЧМн-сигнал, содержащий код ARM, в состоянии 368 передается через ранее установленный канал связи (LINK) на преобразователь 14. Затем дистанционный контроллер ожидает в состоянии 370 подтверждения приема кода ARM от преобразователя 14. После получения подтверждения дистанционный контроллер 12 одновременно запускает таймер для получения кода FIRE в состоянии 372 и активизирует ARCH-модуль 18 в состоянии 374. В состоянии 374 таймер FIRE отсчитывает номинальный период, например, пять секунд, в течение которого на клавиатуре 30 должна быть нажата клавиша FIRE, чтобы взорвать (т.е. инициировать) детонатор 24. Если это не происходит в течение заранее определенного периода времени, то дистанционный контроллер выполняет самоотключение в состоянии 374 и инициирует таймер блокировки в состоянии 376, препятствуя работе дистанционного контроллера 12 в течение номинального периода длительностью 5 минут.
В течение периода, заданного таймером FIRE, микроконтроллер 32 находится в состоянии 378 опроса клавиатуры 30, проверяя, нажата ли клавиша FIRE. Это аналогично состоянию 358 для клавиши ARM и включает шаги, на которых микроконтроллер 12 опрашивает клавиатуру (состояние 360), читает код нажатой клавиши (состояние 362) и получает соответствующий код FIRE (состояние 364) из своей памяти в том случае, если обнаружено нажатие клавиши FIRE. Код FIRE инициирует частотную модуляцию в генераторе с целью получения ЧМн-сигнала для передачи. Затем происходит повторный вход в состояние 366 для проверки правильности работы приемопередатчика 36, после чего в состоянии 368 ЧМн-сигнал, содержащий код FIRE, передается на преобразователь 14.
На фиг. 3 показана конфигурация модуля преобразователя 14 в форме блок-схемы. Преобразователь 14 содержит ЧМн-приемопередатчик 46, который связан с микроконтроллером 48 через шину 50. Микроконтроллер 48 также связан с прерывателем (инвертором) 52 через шину 54. Перезаряжаемая батарея 56 включена в модуль преобразователя 14 в качестве его источника питания. Батарея 56 электрически соединена с цепью источника питания постоянного тока 58, по которой подается ток на приемопередатчик 46, микроконтроллер 48 и прерыватель 52 через шину электропитания 60. В модуль преобразователя 14 также входит обмотка 62 для создания электромагнитного поля. Как микроконтроллер 48, так и прерыватель 52 индуктивно связаны с обмоткой 62 через соответствующие индуктивные связи 64 и 66.
В общих чертах преобразователь 14 генерирует колебания определенной частоты, которые вырабатываются после приема кодированных сигналов команд от дистанционного контроллера 12. После приема и подтверждения определенных команд собственным приемопередатчиком 46 микроконтроллер 48 включает задающий генератор и выполняет наложение команд (в виде цифровых кодовых слов), кодированных в виде уникальных сигналов частотной манипуляции (ЧМн-сигналов), на модулированные сигналы генератора.
Микроконтроллер 48 имеет несколько функций, включая:
- Установление канала связи с дистанционным контроллером.
- Активизацию прерывателя 52, когда происходит прием кода ARM или команды от дистанционного контроллера 12. Это обеспечивает подачу рабочей мощности на ARCH-модуль 18 и последующую передачу управляющих слов на ARCH-модуль 18 после допустимого периода времени, которое требуется для стабилизации мощности.
- Управление длительностью периода, в течение которого включен прерыватель 52, и отключение прерывателя 52 после окончания номинального периода в 10 секунд, а также передачу обратного сигнала на дистанционный контроллер 12 о том, что модуль преобразователя 14 отключается на определенный период. Тем самым блокируется ввод или повторный ввод последующих команд в течение программируемого периода времени, который обычно составляет порядка 5 минут.
- Передачу кода FIRE на ARCH-модуль 18 и последующее отключение прерывателя 52.
Преобразователь повторно генерирует свои собственные управляющие и инициирующие слова после получения первичных команд от дистанционного контроллера 12. После приема кода ARM от дистанционного контроллера 12 преобразователь генерирует свой соответствующий код ARM-1. Тот же принцип повторной генерации применяется к приему кода FIRE от дистанционного контроллера 12, после которого происходит генерация кода FIRE-1. Работа модуля преобразователя показана на фиг. 8-10.
На фиг. 8 представлена процедура POWER-UP (включение) для преобразователя 14. Модуль преобразователя 14 имеет внутренний источник питания, а именно батарею 56, поэтому сначала происходит его включение (состояние 400). После включения в состоянии 400 происходит загрузка микроконтроллера 48 в состоянии 402. В состоянии 404 проводится тест функционирования на прерывателе 52. На шаге 406 определяется состояние модуля преобразователя 14 и происходит сохранение байта состояния. Сохраненный байт состояния затем передается в обратном направлении на дистанционный контроллер после установления канала связи, с тем чтобы дистанционный контроллер 12 мог проверять состояние преобразователя 14.
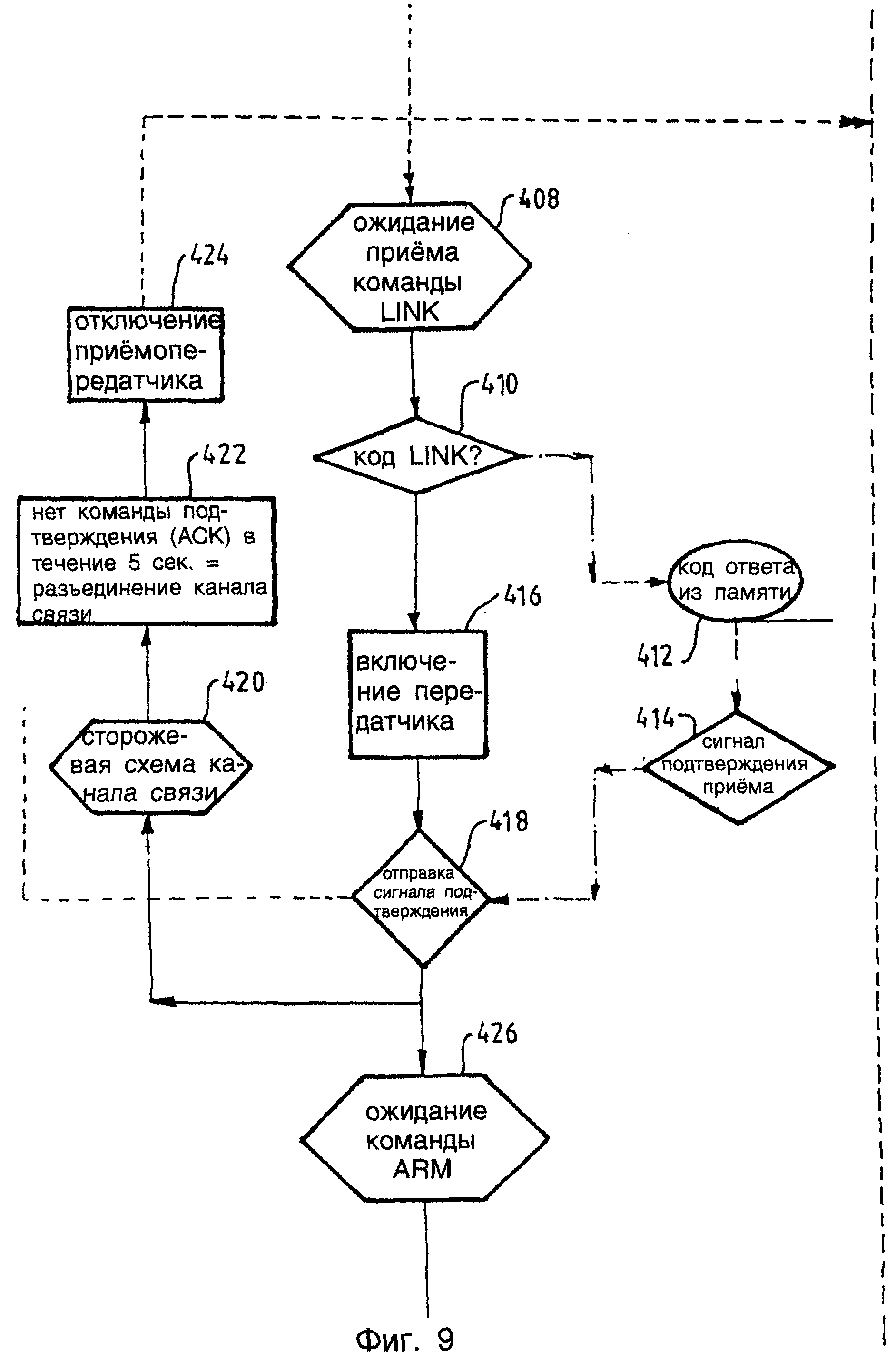
После завершения процедуры POWER-UP преобразователь переходит в состояние "прослушивания" 408, в котором он ожидает приема кода LINK от дистанционного контроллера 12. Если в состоянии 410 происходит прием кода LINK, то преобразователь 14 в состоянии 412 считывает соответствующий код ответа из памяти микроконтроллера 48 и в состоянии 414 генерирует сигнал подтверждения приема. Одновременно происходит включение передатчика в приемопередатчике 46 (состояние 416), чтобы обратный сигнал подтверждения, сгенерированный в состоянии 414, можно было переслать назад дистанционному контроллеру 12 (состояние 418). Именно этот сигнал подтверждения приема обрабатывается в состояниях 342, 344, 346 и 348 процедуры ESTABLISH LINK (установление канала связи) для дистанционного контроллера 12. Для обслуживания канала между дистанционным контроллером 12 и преобразователем 14 используется также сторожевая схема канала 420. Она следит в состоянии 422 за тем, чтобы в состоянии 418 в течение номинального заранее определенного периода времени (например, пять секунд) был передан сигнал подтверждения. Если в течение пяти секунд после приема кода LINK (в состоянии 408) не передано никакого сигнала подтверждения (в состоянии 418), то приемопередатчик 46 отключается в состоянии 424, что приводит к фактическому окончанию подпроцедуры ESTABLISH LINK и возврату модуля преобразователя 14 в состояние включения питания 400 (POWER ON).
Если сигнал подтверждения приема получен в течение временного периода, заданного в состоянии 422, то преобразователь переходит в состояние 426, где происходит ожидание кода или команды ARM от дистанционного контроллера 12. С этого начинается процедура ARM, представленная на фиг. 10. В состоянии 428 микроконтроллер 48 опрашивает сигналы, получаемые приемопередатчиком 46, чтобы определить, содержат ли они код ARM. Это осуществляется путем декодирования ЧМн-сигналов, передаваемых дистанционным контроллером 12, и сравнения декодированных сигналов с заранее определенными сигналами, которые хранятся в виде таблицы в памяти микроконтроллера 48. Если получен и верифицирован код ARM, то в состоянии 438 микроконтроллер 48 включает прерыватель 52. Прерыватель (т.е. инвертор) 52 имеет общепринятую конструкцию и действует стандартным образом от источника питания постоянного тока, давая на выходе переменный ток. Этот выходной ток передается на обмотку 62 с помощью индуктивной связи 66. В одном из вариантов реализации изобретения обмотка 62 намотана вокруг конца 28 забойного стержня 16. Поэтому забойный стержень 16 совместно с обмоткой 62 во время работы прерывателя 52 действует как электромагнит. Соответствующие линии магнитного потока в основном проходят через забойный стержень 16 и, как будет описано более подробно ниже, пересекают воздушный зазор 26, проходят через входную катушку ARCH-модуля 18, чтобы индуцировать электрический ток для ARCH-модуля 18. Однако предпочтительно, чтобы обмотка 62 была фактически установлена внутри забойного стержня 16 на конце, ближайшем к детонатору 24, когда забойный стержень 16 находится в шпуре 20. Это позволяет свести к минимуму потери энергии и максимально увеличить коэффициенты индуктивной связи и передачи энергии на ARCH-модуль 18. В этом варианте изобретения через забойный стержень проходят провода, которые подсоединяют обмотку 62 к остальной части модуля преобразователя 14.
Поскольку ARCH-модуль 18 не имеет собственного источника питания, то затем преобразователь 14 переходит в состояние 432, где таймер отсчитывает время, достаточное для стабилизации уровней мощности в ARCH-модуле 18. Обычной мерой безопасности является то, мгновенная мощность дистанционно генерируемого электромагнитного поля должна быть недостаточной для инициирования детонатора 24. Поэтому ARCH-модуль 18 должен содержать электрические схемы накопления и хранения, чтобы накопить за определенное время энергию, необходимую для работы ARCH-модуля и выработки необходимого тока инициирования. После стабилизации преобразователь 14 в состоянии 434 передает тестирующий ЧМн-сигнал на ARCH-модуль 18.
В состоянии 436 из памяти микроконтроллера 48 считывается код ARM-1. Затем код ARM-1 используется в генераторе для модуляции с целью получения ЧМн-сигнала, который в состоянии 438 передается из микроконтроллера 48, связывается с обмоткой 62 через индуктивную связь 64 и в таком виде передается на ARCH-модуль 18. Тем самым линии магнитного потока, созданные током, проходящим через обмотку 62, передают не только рабочую мощность на ARCH-модуль 18, но и содержат также управляющие сигналы, включая код запуска ARM-1 и код детонации FIRE-1.
Затем в состоянии 440 на дистанционный контроллер 12 передается сигнал подтверждения приема кода ARM и передачи кода ARM-1. Ожидание этого сигнала подтверждения происходит в состоянии 370 процедуры ARM для дистанционного контроллера 12, см. фиг. 7. После передачи сигнала подтверждения преобразователь 14 инициирует таймер FIRE (состояние 442), и в состоянии 444 происходит отсчет заранее определенного периода отключения, равного, например, пяти секундам, в течение которых нужно получить код FIRE от дистанционного контроллера 12. Если код FIRE не получен в течение заранее определенного периода времени в состоянии 444, то модуль преобразователя 14 отключается. При этом, конечно, происходит отключение прерывателя 52, что прекращает подачу энергии на ARCH-модуль 18.
Если от дистанционного контроллера в течение заранее определенного периода времени поступает код FIRE, то микроконтроллер 48 считывает из своей памяти код FIRE-1, который отличается от кода FIRE, переданного дистанционным контроллером 12, и использует этот код для частотной модуляции в генераторе и выработки ЧМн-сигнала, который связывается с обмоткой 62 через индуктивную связь 64 и передается на ARCH-модуль 18.
В соответствии с фиг. 4 ARCH-модуль 18 содержит входную катушку 68, которая ориентируется таким образом, чтобы получить связь с линиями магнитного потока, проходящими через забойный стержень 16. Обмотка 68 также содержит индуктивные выходные связи 70 и 72. Ток на выходе индуктивной связи 70 подается на источник питания 74 для ARCH-модуля 18, в то время как выход из связи 72 является входом в приемник ЧМн-сигналов 76. Источник питания 74 воспринимает индуцированное электромагнитное поле, после чего выпрямляет, накапливает и использует результирующее напряжение постоянного тока для зарядки RC-цепочки (резистор-конденсатор). Емкость конденсатора в этой цепочке достаточна для того, чтобы обеспечить требования по рабочему напряжению и мощности для других собственных электронных компонентов, а также обеспечить ток и напряжение детонации, которые требуются для инициирования детонатора 24.
Приемник ЧМн-сигналов обнаруживает ЧМн-сигналы, которые передаются приемопередатчиком 46 модуля преобразователя 14. Как описано выше, эти ЧМн-сигналы накладываются на индуцированное электромагнитное поле и линии магнитного потока. Уровни входных сигналов, поступающих на ЧМн-приемник 76, могут варьироваться, поэтому желательно, чтобы это устройство включало внутреннюю автоматическую регулировку усиления (АРУ). Это обеспечивает постоянный уровень сигналов, поступающих на приемник 76. Поскольку ЧМн-приемник 76 имеет собственный источник питания, то желательно, чтобы он потреблял абсолютно минимальное количество энергии и работал при минимально возможном напряжении. ЧМн-приемник имеет цифровой выход, который непосредственно связывается с собственным микроконтроллером 78. Микроконтроллер 78 работает таким образом, чтобы следить за потоком слов, передаваемых в цифровой форме от ЧМн-приемника, и искать подходящие командные слова, которые предполагается получить с дистанционного контроллера (которые повторно генерируются и ретранслируются преобразователем 14).
Источник питания 74 подает на микроконтроллер 78 стабилизированное напряжение, обеспечивая тем самым, что на него не подействует повышение напряжения, индуцированного обмоткой 68. При "включении" микроконтроллер 78 выполняет набор проверок состояний и предварительных проверок, прежде чем начать распознавание поступающих команд. Эти предварительные проверки требуются для подтверждения того, что используются корректные рабочие напряжения, а также для тестирования управляющих линий входов и выходов.
После того, как микроконтроллер 78 проверит правильность своей работы, он переходит к распознаванию управляющих слов, передаваемых от дистанционного контроллера 12 через преобразователь 14. В соответствии с синхронизацией операций системы 10 после того, как преобразователь генерировал электромагнитное поле через прерыватель 52, обмотку 62 и забойный стержень 16, последующие коды ARM-1 и FIRE-1 должны быть получены в пределах заданных временных интервалов, как это описано выше. Если это не происходит, то микроконтроллер 78 будет игнорировать все поступающие сигналы и фактически перейдет в режим SLEEP (неактивное состояние). После этого единственным способом повторной инициализации данной последовательности является отключение и последующее включение питания. Это можно осуществить путем сброса в начальное состояние дистанционного контроллера 12 и повторения последовательности инициирования.
После приема кода ARM от дистанционного контроллера 12 преобразователь 14 подает ток на обмотку 62, ждет в течение периода, соответствующего времени установления, которое требуется для стабилизации уровня мощности в ARCH-модуле и предварительных проверок микроконтроллера ARCH-модуля (состояние 432), и затем передает собственный сгенерированный внутренним образом код ARM-1 на ARCH-модуль 18. Если преобразователь 14 не получает код FIRE от дистанционного контроллера в течение номинального периода времени после приема кода ARM, то он отключает прерыватель 5 и, тем самым, отключает подачу электропитания на ARCH-модуль 18. При этой последовательности ARCH-модуль 18 ожидает приема кода FIRE-1 от преобразователя 14 в течение номинального 5-секундного интервала. Если это не происходит, то предполагается, что преобразователь не получил код FIRE от дистанционного контроллера 12, и поэтому микроконтроллер 78 отключает ARCH-модуль 18 и возвращается в режим SLEEP (неактивное состояние).
Когда микроконтроллер 78 получает и декодирует код FIRE-1 от преобразователя 14, он инициирует последовательность детонации. Это осуществляется путем сигнализации для поочередного перевода одной или нескольких управляющих линий 82 в определенное выходное состояние, что позволяет выполнить запуск логической матрицы 84, после чего происходит подача питания на переключатель или реле 86 взрывания, подсоединенное к детонатору 24. Реле 86 - это предпочтительно реле типа DPDT (двухполюсная группа переключающих контактов) с одним набором контактов, обеспечивающих постоянную цепь короткого замыкания между выводами 88, ведущими к детонатору 24. Тем самым гарантируется, что ток не поступит на детонатор 24, пока не будет разомкнута цепь короткого замыкания при активизации реле 86. Это может произойти только после обработки команды FIRE-1 микроконтроллером 78, а также при соответствии всем остальным логическим параметрам и условиям. Обычно это может предусматривать передачу кода FIRE-1 преобразователем 14 определенное количество раз (например, 30 раз), а также корректное декодирование и проверку этого сигнала приемником 76 и микроконтроллером 78 в каждом случае.
После получения кода FIRE-1 и удовлетворительном выполнении всех внутренних проверок происходит переключение тока детонации на выводы детонатора 88 через источник питания 74 для инициирования детонатора 24.
На фиг. 11 показан второй вариант реализации системы радиодетонации 10. В этом варианте реализации ARCH-модуль 18 остается без изменений и поэтому не показан на фиг. 11. Отличия между первым и вторым вариантами реализации касаются конфигурации и работы дистанционного блока управления 12' и преобразователя 14'. Существенным отличием, которое будет описано более подробно ниже, является то, что преобразователь можно устанавливать в режим работы LOCAL (местный), что позволяет пользователю вручную вводить различные инструкции (команды) и коды для передачи на ARCH-модуль. Тем самым пользователь может взрывать детонатор 24, например, укрывшись за каким-либо оборудованием или барьером, и использовать непосредственно преобразователь 14' вместо удаления на значительное расстояние от детонатора 24 и использования дистанционного контроллера 12' для подрыва заряда 24. Если преобразователь 14' находится в режиме работы REMOTE (дистанционный), то дистанционный блок управления 12' можно использовать по сути таким же образом, как и дистанционный контроллер 12, который описан выше как устройство для подрыва детонатора 24.
При первоначальном включении преобразователя 14' он автоматически устанавливается в режим работы REMOTE (дистанционный) и при этом подсвечивается индикатор REMOTE (500). Электропитание, необходимое для поддержки режима слежения, подается на микроконтроллер 502 и на защищенные от ошибок генераторы кодов. Переключатели ARM 506 и FIRE 508 не оказывают никакого влияния, пока пользователь не введет правильный персональный идентификационный номер (PIN) с помощью средства ручного ввода, такого как клавиатура, после чего можно использовать переключатель 512 для перевода преобразователя 14' в режим LOCAL. Основная схема микроконтроллера 502 переходит в состояние WAIT (ожидание) и следит за поступающими командами и сигналами от дистанционного контроллера 12', а также за нажатиями клавиш на клавиатуре 510 и переключателями 506, 508 и 512.
Пользователь может выбрать режим работы LOCAL с помощью переключателя режимов 512. После этого, прежде чем осуществится фактический переход в режим LOCAL, должны произойти определенные события и должны быть выполнены логические проверки для защиты от ошибок. Сначала индикатор REMOTE (500) будет оставаться освещенным, даже если переключатель MODE (режим) 512 был переключен в режим LOCAL. Индикатор режима LOCAL 514 загорится только после успешного завершения процесса аутентификации.
После активизации переключателя 512 в системе таймера и внутренней логики 516 происходит отсчет заранее определенного периода времени, например, 10 секунд. В течение этого промежутка времени пользователь должен ввести с клавиатуры 510 правильный PIN-код. Если пользователь вводит правильный PIN-код с клавиатуры 510 в течение заданного временного промежутка, который отсчитывается таймером 516, то индикатор REMOTE (500) гаснет и загорается индикатор LOCAL (514). Кроме того, активизируется генератор A1S (518) в блоке преобразователя 14'. Генератор 518 генерирует код или из одних единиц, или соответствующий тональный сигнал, который передается приемопередатчиком 504 на дистанционный контроллер 12'. Дистанционный контроллер 12' сконфигурирован таким образом, чтобы с ним нельзя было работать, пока он принимает от преобразователя 14' этот тональный сигнал (код из одних единиц).
В случае ввода неверного PIN-кода с клавиатуры 510 или отсутствия ввода PIN-кода в течение заранее заданного периода времени микроконтроллер 502 отключается на второй заранее определенный период времени, после которого пользователь может снова начать работу с преобразователем 14'. Допустимые PIN-коды можно хранить в памяти микроконтроллера 502. Предполагается, что эти PIN-коды можно при желании изменять или удалять.
Если преобразователь 14' переключается в режим LOCAL и происходит нажатие или иная активизация переключателя 506, то источник питания постоянного тока (внутренний или управляемый преобразователем 14') переключается на инвертор (т.е. прерыватель) для получения на выходе переменного тока, который подается через разъединитель забойного стержня (не показан) на обмотку забойного стержня (не показана, но эквивалентна обмотке 62 на фиг. 3), которая является составной частью приемопередатчика 504. Тем самым генерируется электромагнитное поле, чтобы индуцировать рабочую мощность для ARCH-модуля 18. Преобразователь 14' и обмотка забойного стержня являются отдельными компонентами, которые соединены проводами. Поэтому обмотку можно поместить на забойный стержень 20, а с преобразователем можно работать, укрывшись за оборудованием или защитным устройством, расположенным напротив забойного стержня. Как и в предыдущем варианте реализации изобретения, состояние ARM сохраняется в течение заранее определенного периода времени, который можно изменять в интервале между 0 и 9 секундами. Если переключатель FIRE 508 не активизирован или не нажат в течение этого промежутка времени, то преобразователь 14' отключает подачу питания на инвертор (и, тем самым, на ARCH-модуль) и выполняет самоотключение на заранее определенный период времени. Если переключатель FIRE 508 активизирован в течение заданного временного промежутка, то микроконтроллер 502 сначала проверяет или верифицирует активизацию переключателя FIRE 508 и затем генерирует код FIRE в форме 128-битной строки данных. Эта строка фактически используется для модуляции выходного сигнала инвертора, в результате чего он действует как источник широтно-импульсной модуляции (PWM) для приемопередатчика 504. Результирующий PWM-сигнал переменного тока действует и как источник мощности, и как информационный сигнал, что требуется для ARCH-модуля 18.
Дистанционный контроллер 12' может работать только в том случае, когда преобразователь 14' переключен в режим работы REMOTE. Если преобразователь 14' находится в режиме LOCAL, то на дистанционном контроллере 12' горит индикаторная лампа и любые переключатели, клавиши или другие средства ввода на дистанционном контроллере 12' фактически блокированы, тем самым не позволяя пользователю вводить любые команды в дистанционный блок управления 12'. При первоначальном включении питания дистанционного контроллера 12' на встроенный микроконтроллер 520, а также на приемопередатчик 522 и декодер A1S (524) подается электропитание, необходимое для поддержки режима слежения. Переключатели ARM 526 и FIRE 528 не оказывают никакого влияния, пока на дистанционном контроллере 12' не будет установлен режим LOCAL. Дистанционный контроллер 12' содержит индикатор режима REMOTE 530 и индикатор режима LOCAL 532.
Если преобразователь 14' был переключен в режим работы REMOTE, то при включении дистанционного блока управления 12' начинает светиться индикатор режима LOCAL 532 и гаснет индикатор режима REMOTE 530. Индикатор режима LOCAL 532 загорится только после успешного завершения процесса аутентификации.
Если переключатель выбора режима работы 512 на преобразователе 14' установлен в режим REMOTE, то с помощью кодера A1S (518) генерируется тональный сигнал 1,5 кГц (соответствующий коду из одних единиц), который передается приемопередатчиком 504. Приемопередатчик 522 дистанционного блока управления 12' должен принять и декодировать этот тональный сигнал, прежде чем его можно будет переключить в режим работы LOCAL. Это защищенная от ошибок система, поэтому контроллер 12' недоступен для работы, если преобразователь 14' находится в режиме работы LOCAL.
Если все в порядке и декодер A1S (524) декодировал нужный тональный сигнал, то декодер 524 затем инициирует таймер в логическом устройстве и таймер 526 инициирует отсчет первого периода времени, который обычно составляет порядка 10 секунд. В течение этих 10 секунд оператор должен ввести достоверный PIN-код с клавиатуры 534. Если PIN-код не введен в течение этого заранее определенного периода времени или это неверный PIN-код, то микроконтроллер 520 отключается на второй заранее определенный период времени, прежде чем его можно будет снова активизировать.
Если введен правильный PIN-код, то микроконтроллер 520 работает таким образом, чтобы установить канал радиосвязи с преобразователем 14' аналогично тому, как это описано для первого варианта реализации изобретения. В общих чертах микроконтроллер 520 генерирует уникальное идентификационное кодовое слово (т. е. код LINK) и непрерывно передает это кодовое слово через приемопередатчик 522, пока не будет получен сигнал подтверждения приема от преобразователя 14'. Если подтверждение не получено в течение установленного (но регулируемого) периода времени (например, 60 секунд), то микроконтроллер 520 переходит в начальный режим и оператор снова получает запрос ввода правильного PIN-кода. Программа основного цикла микроконтроллера 520 структурируется таким образом, что она игнорирует любые действия с переключателями ARM/FIRE 526 и 528 в течение этого периода времени, пока не будет установлен канал радиосвязи с преобразователем 14'. Если установлен канал радиосвязи и оператор нажимает переключатель ARM (526), то через приемопередатчик 522 на преобразователь 14' передается код ARM. Преобразователь 14' затем выполняет последовательность запуска, но прежде чем микроконтроллер 520 будет активизирован для дальнейшей работы, преобразователь 14' должен подтвердить прием кода ARM. После получения достоверного подтверждения приема от преобразователя 14' в устройстве 526 снова начинает работать таймер, отсчитывающий заранее определенный период времени, который можно изменять от 0 до 9 секунд. Кроме того, на дистанционном контроллере 12' загорается индикатор ARMED. Если в течение вышеупомянутого периода времени активизируется переключатель FIRE (528), то микроконтроллер 520 передает код FIRE через приемопередатчик 522 на преобразователь 14'. Код FIRE, передаваемый с дистанционного контроллера 12', обычно представлен 32-битным словом. Преобразователь 14' должен передать сигнал подтверждения приема кода FIRE от приемопередатчика блока 12' и получить тот же код во второй раз, прежде чем преобразователь 14' инициирует цикл детонации.
Из вышеприведенного описания очевидно, что систему 10 можно использовать для инициирования электрического детонатора или электрозапала для детонации или быстрого распада энерговыделяющего материала, включая взрывчатое вещество или движущее вещество, в предварительно высверленном отверстии (шпуре) в поверхности твердой породы или в аналогичном материале, который нужно взорвать или фрагментировать. Предполагается, что основным приложением ARCH-модуля 18, который потенциально может произвести революцию в методах бурения твердых пород, являются горные работы. В соответствии с этим может быть изготовлена специальная бурильная машина, которая бурит шпур или шпуры в горной породе и автоматически вставляет ARCH-модуль 18 и забойный стержень 16 с преобразователем 14 или, по крайней мере, с обмоткой преобразователя. Возможно многократное использование забойного стержня (так же, как и преобразователя 14 и дистанционного контроллера 12), однако ARCH-модуль 18 уничтожается. Поэтому данная машина должна быть снабжена запасом ARCH-модулей с присоединенными детонаторами 24 для размещения в шпурах вместе с энерговыделяющим материалом. Более точно, предполагается, что рассматриваемая машина обычно должна иметь стрелу-манипулятор, которая может поворачиваться вокруг своей продольной оси и удерживать бур для бурения шпуров в горной породе, систему для доставки или размещения ARCH-модуля 18 с присоединенным детонатором 24 и заряд энерговыделяющего материала в пробуренном шпуре, а также подъемник для вставки и последующего извлечения забойного стержня 16 из шпура. Машина может работать по существу непрерывным образом, чтобы сначала происходило бурение шпура, затем происходил поворот стрелы-манипулятора для выравнивания средства на уровне шпура с целью размещения ARCH-модуля 18 и детонатора 24 в этом шпуре и после этого снова поворот стрелы-манипулятора, чтобы подъемник мог вставить забойный стержень 16. Оператор машины может затем из кабины машины или позади машины управлять преобразователем 14' (который установлен в режим работы LOCAL) для дистанционного взрыва детонатора 24. Затем этот процесс последовательно повторяется.
Кроме того, предполагается, что ARCH-модуль 18 и систему 10 можно использовать не только для горных работ, а для таких приложений, как строительные землеройные работы, инициирование фейерверков и т.д.
Существенным преимуществом ARCH-модуля 18 по сравнению с предыдущим уровнем техники является то, что для инициирования детонации здесь нет необходимости в физическом размещении проводов или детонационного шнура в шпуре, где находится детонатор. Такие провода могут действовать как антенны, воспринимающие электромагнитные поля рассеяния и индуцирующие токи, которые могут привести к преждевременной детонации. Кроме того, физическое размещение проводов или шнура во взрывном шпуре по существу опасно из-за возможности обвала пород. В результате только этого фактора уровень безопасности ARCH-модуля 18 значительно выше при сравнении с ранее известными устройствами и системами подрыва детонаторов. Кроме того, ARCH-модуль обладает встроенными логическими средствами, блокирующими подачу тока детонации даже при индуцировании тока электромагнитными полями рассеяния, поскольку ARCH-модуль должен также принять и верифицировать достоверный код FIRE.
Безопасность работ дополнительно повышается за счет того, что пока не будет получен и верифицирован код FIRE, ток, направленный к детонатору в ARCH-модуле 18, пропускается через цепь короткого замыкания. В результате становится невозможной подача тока детонации на детонатор.
Теперь, когда подробно описана одна из реализаций настоящего изобретения, специалистам в соответствующих областях техники ясно, что в эту реализацию можно внести различные модификации и вариации без отхода от основных идей изобретения. Например, в качестве методов модуляции для системы 10 в описанных вариантах реализации используются частотная манипуляция и широтно-импульсная модуляция. Однако могут использоваться и другие схемы модуляции, такие как когерентная или некогерентная амплитудная манипуляция (АМн) или фазовая манипуляция (ФМн) или относительная фазовая манипуляция. Кроме того, между различными компонентами системы 10 могут быть использованы другие протоколы для подтверждения приема различных управляющих сигналов и кодов. Кроме того, заранее определяемые ограничения по времени, которые описаны выше, например, в состояниях 354, 374 и 422, могут быть изменены. Кроме того, предполагается, что возможна передача мощности и управляющих сигналов/кодов на ARCH-модуль 18 в виде отдельных сигналов и полей вместо их объединения в один сигнал. Кроме того, связь и передача энергии между дистанционным контроллером 12 и преобразователем 14' может осуществляться через кабели или провода, а не путем радиосвязи. Однако при этом существенно, чтобы связь между преобразователем 14 и ARCH-модулем 18 происходила с помощью электромагнитных волн, а не по проводам.
Предполагается, что все эти модификации и вариации входят в объем настоящего изобретения, сущность которого должна определяться из предшествующего описания и прилагаемой формулы изобретения.
Реферат
Изобретение касается системы детонации, управляемой с помощью электромагнитной индукции для инициирования детонирующего материала, в частности, но не исключительно, для неконтактного инициирования детонирующего материала в шпуре. Технический результат - снижение вероятности случайного инициирования детонирующего материала. Система детонации согласно заявляемому изобретению содержит автоматизированный радиоуправляемый зарядный модуль (ARCH-модуль), подсоединенный к энергетическому веществу и помещенный в шпуре, образованном в твердом материале, причем ARCH-модуль выполнен без постоянного собственного источника питания и содержит силовую цепь для получения с помощью средства электромагнитной индукции рабочей мощности от дистанционно генерируемого электромагнитного поля, а силовая цепь выполнена с возможностью обеспечения рабочей мощности для ARCH-модуля и имеет структуру, выполненную с возможностью генерирования тока детонации, подающегося на энергетический материал, и средство приема и декодирования передаваемых по радио управляющих сигналов, включая код FIRE, при верифицированном приеме которого происходит подача тока детонации на энергетический материал. Система детонации также содержит забойный стержень для забойки шпура, в который помещен энергетический материал и ARCH-модуль, и блок преобразователя для передачи по радио управляющих сигналов, содержащий обмотку для генерирования электромагнитного поля, установленную на/или в забойном стержне для обеспечения передачи рабочей мощности на ARCH-модуль посредством электромагнитной индукции. 2 с. и 31 з.п. ф-лы, 11 ил.

Комментарии