Способ разминирования - RU2298761C1
Код документа: RU2298761C1
Чертежи
Описание
Изобретение относится к методам обезвреживания мин, в частности к способам разминирования.
Известен мобильный роботизированный комплекс (Патент RU 29857), содержащий платформу с роторно-винтовыми движителями, который может быть использован для подрыва мин путем наезда на них.
Недостатком такого способа разминирования являются высокие материальные затраты, обусловленные высокой стоимостью робота, используемого в качестве объекта подрыва при уничтожении мин, вследствие его относительно высокой сложности.
Известен роботизированный мобильный комплекс гуманитарного разминирования (Журнал «Наука и жизнь» №6, 2002, стр.32-33), в котором для обнаружения скрытых взрывчатых веществ используется фотоядерный метод, а для ликвидации мин на месте либо их эвакуации содержит соответствующую систему.
Недостатком известного способа разминирования является высокая стоимость роботизированного комплекса, обусловленная высокой сложностью системы.
Цель изобретения - снижение стоимости, повышение эффективности и безопасности процесса разминирования.
Указанная цель достигается тем, что способ разминирования путем наезда самодвижущейся системы и подрыва ее вместе с миной предполагает использование группы дистанционно управляемых мобильных роботов-тральщиков, перекрывающих в движении своим рядом ширину полосы разминирования, заменяющихся при подрыве запасными роботами, базирующимися на основной самодвижущейся платформе, при этом при иссякании запасных роботов восстановление плотности ряда движущихся роботов обеспечивается за счет снижения средней ее плотности, причем робот-тральщик выполнен в виде катка со встроенным приводом и содержит управляемые реактивные рычаги и вибрационное устройство.
Отличительным признаком в заявляемом изобретении является то, что способ предполагает использование группы дистанционно управляемых мобильных роботов-тральщиков, перекрывающих в движении своим рядом ширину полосы разминирования, заменяющихся при подрыве запасными роботами, базирующимися на основной самодвижущейся платформе, при этом при иссякании запасных роботов восстановление плотности ряда движущихся роботов обеспечивается за счет снижения средней ее плотности, причем робот-тральщик выполнен в виде катка со встроенным приводом и содержит управляемые реактивные рычаги и вибрационное устройство.
Изобретение поясняется чертежами, где:
на фиг.1 изображена группа роботов-тральщиков и основная самодвижущаяся платформа с запасными роботами, где стрелками указаны направление движения группы роботов и направление движения запасного робота в случае подрыва одного из ряда;
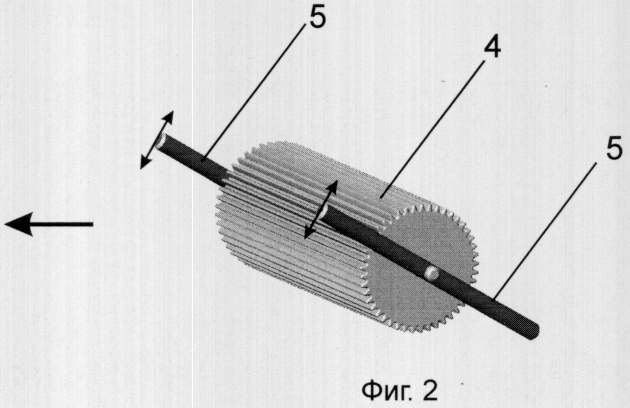
на фиг.2 - робот-тральщик.
Используемые при реализации данного способа разминирования роботы-тральщики 1 образуют в движении ряд, перекрывающий ширину полосы разминирования, а запасные роботы-тральщики 2 базируются на основной самодвижущейся платформе 3, имеющей, например, колесное шасси. Робот-тральщик 1 выполнен в виде катка 4 с размещенными внутри приводом и вибрационным устройством. По бокам катка 4 размещены управляемые реактивные рычаги 5, которые обеспечивают реактивный момент, необходимый для движения катка. Поворотом реактивных рычагов 5 относительно оси катка обеспечивается торможение катка с одной или другой стороны, что приводит к необходимому изменению направления движения робота-тральщика. Система управления обеспечивает охват единой коммуникационной связью роботов-тральщиков, основной самодвижущейся платформы и центра управления.
Способ разминирования реализуется следующим образом.
Роботы-тральщики 1, двигаясь плотным рядом по полосе разминирования, наезжают на мины, находящиеся на поверхности, а также воздействуют посредством вибрационного устройства на мины, находящиеся на некоторой глубине в грунте. В результате механического воздействия на мину происходит подрыв мины вместе с роботом-тральщиком. Таким образом выполняется задача уничтожения мины. Брешь, возникающая в ряду роботов-тральщиков в результате подрыва одного из них, оперативно восстанавливается запасным роботом-тральщиком 2, съезжающим с основной самодвижущейся платформы 3, движущейся на безопасном расстоянии от впереди движущихся роботов-тральщиков. При иссякание запасных роботов восстановление плотности ряда движущихся роботов обеспечивается за счет снижения средней ее плотности.
Данный способ разминирования не влечет за собой больших материальных затрат вследствие низкой стоимости роботов-тральщиков, обусловленной примитивностью их конструкции, обладает высокой эффективностью за счет возможности самовосстановления группировки роботов запасными, дистанционное управление обеспечивает безопасность процесса разминирования.
Реферат
Изобретение относится к обезвреживанию мин, в частности к способам разминирования. Сущность изобретения заключается в том, что способ предполагает наличие избыточного количества недорогих автономных мобильных роботов-тральщиков, базирующихся на основной самодвижущейся платформе. Уничтожение мин обеспечивается за счет подрыва на них роботов-тральщиков. Бреши, возникающие в результате подрыва отдельных роботов-тральщиков, восстанавливаются запасными, базирующимися на основной самодвижущейся платформе. При иссякании запасных роботов-тральщиков восстановление плотности ряда движущихся роботов-тральщиков обеспечивается за счет снижения средней ее плотности. Реализация изобретения позволяет повысить эффективность и безопасность процесса разминирования за счет возможности самовосстановления группировки роботов-тральщиков запасными и использования дистанционного управления. 2 ил.

Формула
Документы, цитированные в отчёте о поиске
Устройство для поиска скрытых в грунте объектов
Комментарии