Система виртуальной реальности и телереальности - RU2131621C1
Код документа: RU2131621C1
Чертежи


















Описание
Настоящее изобретение относится к виртуальной реальности и телереальности, используемых в различных областях, например проектировании, образовании, обучении, развлечениях, опасных операциях, микроманипулировании/супермикроманипулировании, и, в частности, - к системе виртуальной реальности и системе телереальности, которые в реальном времени отображают оператору ощущения силы в виртуальном мире, созданном компьютером, или в мире телереальности, который фактически существует, используя механизм управления, который электрически изменяет сопротивление потока электрореологического флюида.
Система виртуальной реальности и система телереальности в соответствии с настоящим изобретением также используются как осязательный интерфейс, который отображает информацию, воспринятую моторно-сенсорной системой, то есть информацию, связанную с ощущениями механической силы в связи с движениями тела.
Терминология
Термин "виртуальная реальность" в настоящем изобретении относится к миру изображений типа компьютерной графики, созданной на дисплее
компьютером. Изображения
могут быть сформированы на любом дисплее - ЭЛТ, экране, плоском дисплее и трехмерном дисплее. Хотя изображения, сформированные на визуальном дисплее, синхронизированы в
реальном времени с
сопротивлением потока электрореологического флюида, в устройстве отображения силы, так же как в телереальном мире, реальный эффект силы не проявляется так, как в телереальном
мире.
Термин "реальное время" в настоящем изобретении означает, что отсутствует какая-либо существенная задержка, хотя допускается очень короткая задержка в обработке изображения, электрической или механической передачи.
Термин "телереальный мир" (дистационно-воспринимаемая реальность) в настоящем изобретении относится к миру, в котором механические силы проявляются подобно действиям в экстремальных условиях окружающей среды в различных областях, таких как ядерная энергия, море, предотвращение катастроф или космос, или микроманипулирование/супермикроманипулирование в различных отраслях, таких как медицинское лечение, электронные компоненты, микрообработка. Другими словами, телереальный мир - это мир, в котором механические силы воспринимаются оператором системы отображения силы с помощью механической среды, например, робота или манипулятора, а реальный мир - это мир, в котором механические или физические законы проявляются там, где присутствует оператор. Следовательно, мир, в котором присутствует оператор системы отображения силы, синхронизирован с телереальным миром, в котором проявляются механические силы, и является миром реального времени.
Термин "система виртуальной реальности" относится к системе, в которой находится оператор в реальном времени так, как если бы он или она присутствовали, действовали или работали в виртуальном мире, созданном компьютером. Хотя в известных системах преимущественно рассматривается действие на зрение и/или слух, в системе, согласно настоящему изобретению, рассматривается действие и ощущения силы.
Термин "система телереальности" в настоящем изобретении относится к системе, которая обеспечивает оператора дистационным присутствием в реальном времени так, как если бы он или она воспринимали события в реальном мире, таком, как прекрасная, опасная или плохая окружающая среда, через механическую среду, например робота, таким образом, воспринимая в реальном времени различные ощущения оператора, особенно к ощущениям силы.
Термин "система телеприсутствия" (система дистанционного присутствия) включает в себя как систему виртуальной реальности, так и систему телереальности.
Термин "восприятие силы" имеет отношение к тактильному или телесному восприятию, то есть восприятию, которое сопровождает движение человеческих рук или ног или действие на внешние объекты. Тактильное восприятие включает такие ощущения, как мягкое, жесткое, тяжелое, легкое, сильное, упругое или вязкое, связанные с действиями типа толчок, натяжение, прикосновение, схватывание, удар или пинок, и телесное ощущение включает ощущения при надавливании, рывке или сжатии.
Термин "устройство отображения силы" относится к устройству, выполненному в форме перчаток, пальцев, рук, кистей или локтей, которые являются точными копиями человеческих. Устройство отображения силы в соответствии с настоящим изобретением, которое использует электрореологическую текучую среду, может быть выполнено в виде более простой и более компактной конструкции, чем известное чисто механическое устройство.
Термин "механические переменные" относится к таким переменным, как положение, угол, величина искажения (деформации), скорость, сила, давление, ускорение. Датчики для детектирования этих переменных закрепляются на устройстве отображения силы. Они часто устанавливаются на выходной системе, которая выполняет механическую операцию в телереальном мире.
Термин "электрореологический флюид" характеризует флюид, вязкость которого меняется
мгновенно и обратимо, если к нему прикладывается электрическое поле и флюиды приблизительно разделены
на дисперсный (дисперсионный) электрореологический флюид и однородный (гомогенный)
электрореологический флюид. Дисперсный электрореологический флюид образован путем диспергирования (рассеяния)
диэлектрических частиц в изолирующем масле, в то время как в однородном
электрореологическом флюиде не используются частицы. В качестве дисперсного электрореологического флюида используются:
1. неорганические частицы: кремнезем или цеолит, содержащий
ионно-поляризуемую воду, кислоту, щелочь или органический электролит;
2. органические частицы: ионообменная смола или целлюлоза;
3. частицы полупроводникового материала: уголь,
полианилин или металлофталоцианин, который не содержит воду и вызывает скорее электронную поляризацию, чем ионную;
4. металлические
частицы или частицы электропроводного полимера, имеющие
изолирующие тонкопленочные покрытия на их поверхностях;
5. частицы, составленные из материалов с анизотропией проводимости и
нелинейной оптической характеристикой.
Кроме того, в основном используются следующие изолирующие масла, которые стабильны в электрической изоляции, в дополнение к стабильным механическим, физическим и химическим характеристикам: например силиконовое масло, фторуглеродное масло, минеральное масло, парафин, эфирное масло ароматического ряда, масло на основе циклического соединения сложного эфира алифатического ряда, нефть.
С другой стороны, в качестве гомогенного электрореологического флюида предпочтительно использовать материалы или их растворы с такими свойствами, какими обладают жидкие кристаллы: анизотропия вязкости, амфифилия, сегнетоэлектричество и высокий дипольный момент, в частности жидкий кристалл, и предпочтительно жидкокристаллический полимер.
Дисперсный электрореологический флюид главным образом проявляет свойства флюида Bingham, в котором напряжение сдвига приблизительно постоянно независимо от скорости сдвига при воздействии электрического поля. С другой стороны, однородный электрореологический флюид обычно проявляет свойства так называемого Ньютоновского потока, в котором напряжение сдвига пропорционально скорости сдвига.
Предшествующий уровень
техники
Технология виртуальной реальности или телесуществования находится в расцвете, что обеспечивает
пользователю телеприсутствие в реальном времени, где мы имеем иллюзию, что действительно
присутствуем или работаем в виртуальной реальности, созданной компьютером, или в телереальном мире, который
фактически существует в чрезвычайно тонкой или опасной среде. Чтобы заставить оператора
- человека чувствовать, что он или она находятся в том месте, необходимо устройство отображения силы высокого
качества исполнения. Кроме того, необходимо провести широкий спектр исследований на всех
системах, включая датчики, возбудители (приводы) и компьютерные системы, связанные с устройством отображения
силы.
Известны следующие устройства отображения силы, используемые в системе виртуальной реальности.
В публикации M. Minsky и др. в АСМ SIGGRAPH, том 24, стр. 235, 1990 г. описана "виртуальная наждачная бумага", которая позволяет пальцам чувствовать текстуру поверхности виртуального объекта. Она имеет датчик для определения положений во всех возможных направлениях перемещения и характеризует текстуру величиной сопротивления, созданного специальным большим джойстиком, включающим двигатели и тормоза, каждый из которых закреплен на каждой рукоятке джойстика, таким образом подавая на руку сигналы поверхностной текстурой виртуального объекта.
В публикации lwata и др. в АСМ SIGGRAPH, том 24, стр. 165, 1990 г. раскрыто устройство, которое дает пальцам и руке оператора ощущения силы через специальный манипулятор дискового волчка, когда он или она касаются виртуального объекта.
Манипулятор дискового волчка имеет конфигурацию с многими маленькими металлическими оригинально установленными пантографами и создает силу, которая генерируется механизмом, включающим двигатели, закрепленные на кончиках пальцев.
В публикации Hashimoto и др. в журнале Journal of the Robotics Society of Japan, том 10, стр. 903, 1992 г. раскрыта перчатка для анализа движения человеческой руки. Перчатка называется сенсорной перчаткой и приводится в действие двигателями, объединенными проволочной передачей, и имеет три пальца и десять степеней свободы.
В публикации Sato и др. в Transactions of the Institute of Electronics, Information and Communication Engineers of Japan, D-2, Vol. 7, 887, 1991 (Протоколы Института Электроники, Информации и Инженеров Связи Японии) раскрыто устройство, которое генерирует ощущения при касании изображения на дисплее, наблюдаемого через стереоскопические очки, путем управления натяжением нескольких проводов с селеноидами, соединенных с пальцами.
В публикации Hattori, Университет Rutgers в "Arifisial Reality World", Kogyo Tyosakai publishing company Ltd. стр. 151, 1991, раскрыто устройство для создания механического усилия, когда кончики пальцев касаются виртуального объекта, таким образом на пальцах создается ощущение, как если бы виртуальный объект действительно присутствовал в этом месте. Это устройство содержит микроцилиндры, закрепленные на большом пальце, указательном пальце и среднем пальце, и насос, присоединенный к микроцилиндрам, чтобы в реальном времени подавать воздух, таким образом производя силы отталкивания в пальцы, путем подачи воздуха под давлением, когда кончики пальца касаются виртуального объекта.
В выкладке японской патентной заявки N 6-507032/1994 (PCT/GB 92/00729) Tanaka и в Тезисах 71 JSMB Ежегодного Весеннего Совещания Японского Общества Инженеров Механиков), N 4,373, 1994, описана жидкая перчатка, которая одевается на руку оператора, чтобы обеспечить устройство отображения силы. Жидкая перчатка позволяет воплотить осязательные ощущения, соответствующие захвату роботом путем управления давлением флюида.
Использование электрореологического флюида для управления механическими выходами описано в следующих документах.
В патенте Германии DE3830836C2 раскрыт способ, в котором используется электрореологическая текучая среда для имитатора мощности для самолета. Это относится к типу сервооборудования для оказания помощи операциям, требующим затрат мускульной энергии, или для предотвращения избыточных действий, как в рулевом управлении автомобилей.
В Трудах 11-ой Ежегодной Конференции Общества Робототехники Японии, 987, 1993, Ikeda и др. раскрыто устройство, в котором используют электрореологический флюид для управления выходом биоподражательного возбудителя (биоимитатора). Это относится к устройству управления на механическом выходе искусственного мускула.
Все устройства, использующие электрореологический флюид, относятся к устройствам управления механическими выходами, а не к отображению ощущений силы, в частности к отображению силы системы виртуальной реальности.
В известных устройствах отображения силы существуют различные проблемы. Например, устройства, использующие двигатели, имеют большие габариты, ограниченные степени свободы и замедленную реакцию (медленнодействующие). Устройства, использующие соленоиды или воздушные цилиндры, плохо управляемы и имеют трудности в отображении тонких ощущений.
Изложение существа изобретения
Задача настоящего изобретения - создание системы
телеприсутствия, которая включает компактное устройство
отображения силы, обеспечивающее множество степеней свободы, деликатное отображение ощущений силы и хорошее дистанционное присутствие.
Для решения поставленной задачи заявители настоящего изобретения разработали концепцию применения электрореологического флюида, вязкость которого изменяется под действием электрических сил не только для управления механическим выходом, но также для отображения ощущений при изменении сопротивления потока, обусловленного изменениями вязкости электрореологического флюида, и провели интенсивные исследования этой концепции для выполнения настоящего изобретения.
В соответствии с настоящим изобретением предложена система телеприсутствия (дистанционного присутствия),
которая отображает ощущение силы оператору в ответ на
воздействие оператора на окружающую среду, представленную в форме изображения. Система телеприсутствия содержит:
блок отображения
изображения в ответ на заданный сигнал изображения,
компьютер для генерации сигнала ощущения силы, соответствующего ощущению силы,
устройство отображения силы, включающее средство
управления для электрического изменения сопротивления потока
электрореологической текучей среды (электрореологического флюида) в ответ на сигнал ощущения силы,
и средство создания силы для
оператора, предназначенное для обеспечения оператора силой,
управляемой сопротивлением потока.
Система телеприсутствия дополнительно содержит датчик для детектирования механических переменных в устройстве отображения силы, в котором выходной сигнал из датчика подается обратно в компьютер, с тем чтобы компьютер управлял по меньшей мере либо устройством отображения силы, либо блоком отображения изображения в ответ на выходной сигнал датчика.
Устройство отображения силы дополнительно содержит систему запуска для приведения в действие средства создания силы.
Окружающая среда в виде изображения может представлять телереальный мир, и система телеприсутствия дополнительно содержит средство передачи изображения для получения сигнала изображения путем съемки телереального мира, и датчик телереального мира для определения механических действий в телереальном мире и для подачи выходного сигнала с датчика телереального мира обратно в компьютер, при этом компьютер генерирует сигнал силы в ответ на хотя бы один из сигналов, выходящих из средства получения изображения, и на выходной сигнал из датчика телереального мира для создания сигнала силы для устройства отображения силы.
Окружающая среда в виде изображения может представлять виртуальный мир, и компьютер может заранее сохранять изображения виртуального мира, подавать сигнал в блок отображения изображения в ответ на изображения виртуального мира и подавать сигнал силы в устройство отображения силы в ответ на изображения виртуального мира.
Электрореологический флюид может быть электрореологическим флюидом, проявляющим свойства потока Bingham при приложении к нему электрического поля.
Электрореологический флюид может быть электрореологическим флюидом, проявляющим свойства Ньютоновского потока при приложении к нему электрического поля.
Электрореологический флюид может быть составлен из электрореологического флюида, проявляющего свойства потока Bingham, и электрореологического флюида, проявляющего свойства Ньютоновского потока при приложении к нему электрического поля.
Отличительным признаком настоящего изобретения является то, что в качестве устройства отображения силы использован электрореологический флюид. Так как электрореологический флюид изменяет вязкость в соответствии с напряженностью приложенного электрического поля, можно управлять сопротивлением потока путем изменения напряженности электрического поля. Устройство отображения силы может уменьшать массу датчиков на выходе и, следовательно, может значительно увеличивать отношение выход/ инерция. Таким образом, ощущения силы, воспринятые в виртуальном мире или телереальном мире, могут отображаться с чувством, близким к реальному. Кроме того, устройство отображения силы с множественными степенями свободы может быть выполнено в виде простого и компактного устройства. В результате компактная система виртуальной реальности или система телереальности с превосходной функцией устройства отображения силы может быть выполнена путем синхронизации компьютером устройства отображения силы с блоком отображения изображения.
Краткое описание
чертежей
В дальнейшем изобретение поясняется описанием конкретного варианта его воплощения со ссылками на
сопровождающие чертежи, на которых:
фиг. 1 изображает блок-схему системы
виртуальной реальности, согласно изобретению;
фиг. 2 изображает блок-схему функционирования системы
телереальности, согласно изобретению;
фиг. 3 изображает блок-схему,
иллюстрирующую принцип действия пассивного устройства отображения силы, согласно изобретению;
фиг. 4 изображает
блок-схему, иллюстрирующую принцип действия активного устройства отображения
силы, согласно изобретению;
фиг. 5 изображает общий вид конструкции шара восстановления формы, который составляет
основную часть устройства отображения силы типа перчатки, используемого в
первом варианте воплощения системы телеприсутствия, согласно изобретению;
фиг. 6 изображает поперечный разрез шара в
непосредственной близости от поверхности в двух положениях, согласно
изобретению;
фиг. 7 изображает блок-схему системы телеприсутствия первого варианта воплощения, где шар восстановления
формы присоединен к перчатке данных, согласно изобретению;
фиг.
8 изображает поперечный разрез перчатки данных с шаром восстановления формы, имеющим радиально установленные штырьки, согласно
изобретению;
фиг. 9 изображает блок-схему второго варианта
воплощения системы телеприсутствия и поперечное сечение пассивного устройства отображения силы, используемого в управляющем
устройстве системы имитации вождения автомобиля, согласно изобретению;
фиг. 10 изображает блок-схему устройства отображения силы, третий вариант воплощения системы телеприсутствия, где
показан принцип действия системы телереальности, для нефтяной гидравлической
системы, использующей электрореологический флюид, согласно изобретению;
фиг. 11 изображает блок-схему третьего
варианта воплощения, в которой мост Уитстона, состоящий из четырех клапанов,
электрореологического флюида и одного поршня, поперечное сечение, согласно изобретению;
фиг. 12 изображает
поперечное сечение операторской рукоятки моста Уитстона, согласно изобретению;
фиг. 13 изображает блок-схему третьего варианта воплощения системы телеприсутствия и поперечное сечение
пассивного устройства отображения силы, используемого управляющим устройством системы
имитации вождения автомобиля, согласно изобретению;
фиг. 14 изображает общий вид системы отображения силы,
способной к отображению ощущения силы в плоскости XV пятого варианта воплощения,
согласно изобретению;
фиг. 15 изображает блок-схему системы виртуальной реальности, использующей устройство
отображения силы, согласно изобретению;
фиг. 16 изображает блок-схему
устройства отображения силы, шестой вариант воплощения системы, согласно изобретению;
фиг. 17 изображает
поперечное сечение электродного блока, согласно изобретению;
фиг. 18
изображает положение электродов, когда большой и четыре остальных пальца схватывают виртуальный объект, согласно
изобретению;
фиг. 19 изображает поперечное сечение устройства отображения
силы, используемого в седьмом варианте воплощения системы телеприсутствия, согласно изобретению;
фиг. 20
изображает блок-схему восьмого варианта воплощения системы телеприсутствия,
изобретение применяется к виртуальной игре ловли рыбы, согласно изобретению.
Описание предпочтительных
вариантов реализации изобретения
Фиг. 1 и 2 изображают блок-схемы
систем телеприсутствия в соответствии с настоящим изобретением. Фиг. 1 изображает систему виртуальной реальности и фиг. 2
изображает систему телереальности.
Система виртуальной реальности имеет устройство отображения силы 1, датчик 2, блок отображения изображения 3 и компьютер 4. Датчик 2 соединен с устройством отображения силы 1, чтобы определять механические переменные, которые подаются обратно в компьютер 4. Датчик 2 является существенным признаком для этой системы. Блок отображения изображения 3 отображает виртуальный мир, чтобы показать его оператору системы виртуальной реальности.
Система телереальности (фиг. 2) в дополнение к системе виртуальной реальности (фиг. 1) включает робот 5, действующий в действительном телереальном мире, датчик 6 для определения положения и движения робота и камеру 7 для съемок и передачи изображения телереального мира, в котором блок отображения изображения 3 отображает телереальный мир вместо виртуального мира. Так же как и датчик 6, датчик силы используется для определения механического действия в телереальном мире. Устройство отображения силы 1 включено в средство функционирования робота 5. Сигнал изображения из виртуального мира, который передается камерой 7, может прямо подаваться в блок отображения изображения 3 и компьютер 4 или в компьютер 4 через блок отображения изображения 3. Он может быть также подан в блок отображения изображения 3 через компьютер 4. Сигнал из датчика 6 подается обратно в компьютер 4, чтобы управлять устройством отображения силы 1 и/или блоком отображения изображения 3.
Устройство отображения силы 1 в этих системах включает контроллер для изменения сопротивления потока электрореологического флюида, и разделяется на пассивное устройство отображения силы и активное устройство отображения силы.
На фиг. 3 показана схема пассивного устройства отображения силы, которое электрически управляет вязкостью электрореологического флюида (ER флюид) 11 контроллером 12, чтобы изменять сопротивление потока и получить сигнал отображения силы 13 на выходе. В пассивном устройстве отображения силы используется один из следующих механизмов.
а) Конструкция, которая включает электрореологический флюид, заполняющий промежуток между фиксированными плоскопараллельными электродами или множественными коаксиальными электродами типа цилиндров, и который меняет сопротивление потока (или давление) электрореологического флюида путем управления вязкостью путем приложения электрического поля к электрореологическому флюиду.
б) Конструкция, которая включает электрореологический флюид, заполняющий промежуток между электродами, один из которых фиксирован, а другой - подвижный, в виде параллельных пластин или коаксиальных двойных (или множественных) цилиндров, и который изменяет сопротивление потока (или напряжение сдвига) во время движения подвижного электрода, управляя вязкостью электрореологического флюида путем приложения к нему электрического поля. Движение подвижного электрода представляет собой скользящее движение в случае, когда подвижный электрод является одной из параллельных пластин, и вращение вокруг оси в случае, когда подвижный электрод является одним из коаксиальных цилиндров.
Устройство отображения силы, в котором используются такие контроллеры, обычно выполняется в форме сопла, составленного из двойных или множественных коаксиальных цилиндров, комбинации цилиндра и поршня, или из одной или более пар параллельных пластин в виде слоев, золотников, дисков или фланцев.
На фиг. 4 изображено активное устройство отображения силы. Оно с помощью контроллера 12 электрически управляет электрореологическим флюидом 11, чтобы изменять сопротивление потока так, чтобы выход из системы запуска 14 управлялся сопротивлением потока, чтобы получить сигнал выхода отображения силы 15.
Другими словами, активное устройство отображения силы управляет механическим выходом системы запуска посредством изменения сопротивления потока электрореологического флюида. Конструкция подобна конструкции системы пассивного устройства отображения силы, а механизм выхода обычно имеет форму цилиндра или параллельной пластины.
В качестве системы запуска активного устройства отображения силы используются отдельно или в комбинации внешние возбудители типа двигателей, соленоидов, давления воздуха, давления масла, проводов; или внутренние возбудители, использующие усилие восстановления формы типа пружин, пластинчатых пружин, проволочных пружин, каучука или эластомера по отдельности или в комбинации.
Компьютер 4 управляет устройством отображения силы 1 и блоком отображения изображения 3 синхронно в соответствии с базой данных и программой, которые вводятся заранее. Компьютер 4 обрабатывает сигнал из датчика 2 и/или сигнал из блока отображения изображения 3 для подачи обрабатываемых результатов в устройство отображения силы 1. Кроме того, компьютер 4 рассчитывает напряженность электрического поля, которое нужно приложить к электрореологическому флюиду в соответствии с базой данных и программой, сохраненными заранее, или рассчитывает сигнал из датчика 2, чтобы изменить электрическое поле в ответ на результат расчета, таким образом управляя сопротивлением потока электрореологического флюида. Компьютер 4 в системе телереальности (фиг. 2) далее проводит синхронизацию с телереальным миром. Это может быть проведено другим компьютером, который дополняет компьютер 4.
Устройство отображения силы 1, применяющее электрореологическую текучую среду, проявляющую себя как текучая среда Bingham, в которой напряжение сдвига является почти постоянным независимо от скорости сдвига, превосходно воспроизводит и отображает сопротивление, обусловленное внешним трением. Таким образом, ощущение сопротивления в начале (старт) или в конце (стоп) таких действий, как толчок, рывок, хватание, поворот, удар, отображается с ощущением, близким к реальному. С другой стороны, устройство отображения силы 1, применяющее электрореологическую текучую среду, проявляющую себя как Ньютоновский поток, в котором напряжение сдвига пропорционально скорости сдвига, превосходно себя проявляет в воспроизведении и отображении вязкого сопротивления. Соответственно, ощущение сопротивления в процессе следующих действий, таких как касание, ощупывание, сжимание и поворот, отображается с ощущением, близким к реальному. Таким образом, все типы действий могут отображаться с ощущением, близким к реальному, путем использования в комбинации с электрореологическим флюидом, проявляющим себя как текучая среда Bingham и как Ньютоновский поток, и управляя ими независимо.
Ощущение, отображаемое устройством отображения силы 1, представляется пассивной силой, основанной только на сопротивлении потока электрореологической текучей среды, или активной силой, обусловленной комбинацией выхода системы возбуждения и сопротивления потока. Поскольку электрореологический флюид не производит возбуждения сам по себе, то нет опасения, что пассивная сила превысит силу, произведенную оператором. Следовательно, пассивная сила пригодна для воплощения безопасного устройства отображения силы. Реальное устройство отображения силы часто требует приложения активной силы, которая объединяет пассивную силу с силой возбуждения.
Устройство отображения силы, в соответствии с настоящим изобретением, осуществляет отображение путем электрического изменения сопротивления потока электрореологического флюида в ответ на изменение электрического поля. Это устройство более компактно и быстрее реагирует, чем известные устройства отображения силы, потому что оно использует меньше механических компонентов, чем известные. Кроме того, оно значительно уменьшает массу выходных частей по сравнению с двигателями и т.п., достигая большого отношения выход/инерция. В результате оно может достигать выхода с нужным ускорением, частотой или формой волны. Это позволяет, например, проявлять или воспроизводить тонкие усилия, как удар, трение, хлопок, ощупь, массаж, онемение. Другими словами, это дает возможность передавать силой различные цвета, добиваясь превосходства этого отображения силовых ощущений над известными. В результате может быть воплощена система виртуальной реальности или система телереальности, что обеспечивает превосходное ощущение присутствия в этом месте.
В эту систему телеприсутствия дополнительно к устройству отображения силы 1 и к блоку отображения изображения 3 можно включить устройство для отображения тактильных ощущений, связанных со слухом, запахом, вкусом, болью, зудом (жаждой), чтобы оно действовало синхронно через компьютер 4 или другой компьютер.
Далее настоящее изобретение поясняется подробным описанием конкретных вариантов его воплощения со ссылками на сопроводительные чертежи.
Пример 1 (Первый вариант
воплощения)
На фиг. 5-7 показан вариант
воплощения системы виртуальной реальности. Этот вариант воплощения системы виртуальной реальности содержит устройство отображения силы типа перчатки,
использующее электрореологический флюид.
На фиг. 5 показан общий вид внутренней конструкции шара 101, который составляет основную часть устройства отображения силы типа перчатки. Устройство содержит шар 102, имеющий поверхность, на которой сформировано много цилиндрических выемок 103. В каждую из выемок 103 вставлен штырек 104 так, что между штырьком 104 и внутренней стенкой выемки 103 остается зазор фиксированной ширины, поддерживаемый распорками 105. Электрореологический флюид заполняет зазор и полость выемки. Электрореологический флюид 106 может легко двигаться в ответ на движение штырьков 104 через резервуар текучей среды (не показан) в шаре и зазорах между штырьками 104. Шар 102 образует отрицательный электрод, а штырьки 104 образуют положительные электроды, к которым подведены провода для приложения напряжения. Шар 102 представляет собой алюминиевый шар диаметром 40 мм. Выемки 103 составляют 5 мм в диаметре, и штырьки 104 представляют собой алюминиевые штырьки диаметром 4 мм и длиной 25 мм с плоской полимерной головкой. Зазоры между штырьками 104 и внутренними стенками выемок 103 составляют 0,5 мм по ширине и надежно поддерживаются тефлоновыми распорками 105.
На фиг. 6 изображен поперечный разрез части шара восстанавливаемой формы 101. Шар 102 полностью обернут резиновой шарообразной оболочкой 107, подобной мячу, и плоские головки штырьков 104 упираются во внутреннюю стенку резиновой шарообразной оболочки 107. Диаметр резиновой шарообразной оболочки 107 составляет 55 мм. Электрореологический флюид 106 заполняет не только зазор между штырьками 104 и выемками 103 и полость выемок 103, но также заполняет зазор между внутренней стенкой резиновой шарообразной оболочки 107 и поверхностью шара 102.
На фиг. 7 изображена схема взаимодействия между резиновым шаром 107 и перчаткой данных 108. Перчатка данных 108 предназначена для измерения углов сгиба большого пальца и пальцев (называемых далее "пальцами"), а резиновый шар 107 приклеивается к внутренней стороне перчатки данных 108. Соответственно, штырьки 104 двигаются вперед-назад в выемках 103 в ответ на движение руки сжимание или разжимание, в ходе которого не нужно использовать внешнюю систему возбуждения типа воздушных цилиндров.
Электрореологический флюид 106 изменяет вязкость в соответствии с напряженностью электрического поля. То есть вязкость электрореологического флюида 106, заполняющего зазор между штырьками 104 и выемками 103, увеличивается или уменьшается в ответ на напряженность электрического поля. Таким образом, движение штырьков 104 может свободно управляться как сильное или слабое движение путем изменения сопротивления потока электрореологического флюида 106 электрическим полем.
Синхронизируя блок отображения изображения 3 с устройством отображения силы 1 с шаром восстанавливаемой формы 101, компьютером 4 (фиг. 7) оператор может схватывать виртуальный объект с ощущением действительного присутствия.
Сначала оператор постепенно сжимает пальцы. Напряжения последовательно передаются на штырьки, поскольку пальцы касаются виртуального объекта, который формируется компьютером 4 и отображается на блоке отображения изображения 3, таким образом сжимая штырьки. Движение пальцев измеряется волоконно-оптическим датчиком 2, присоединенным к перчатке данных 108, и результаты измерения вводятся в компьютер 4, который управляет напряжением, прикладываемым к штырькам 104. Наконец, напряжения прикладываются ко всем штырькам, поскольку пальцы касаются виртуального объекта, и штырьки блокируются. Это даст оператору ощущение, как будто он действительно хватает виртуальный объект, отображаемый на экране. Наоборот, при разжимании пальцев напряжения снижаются настолько, чтобы штырьки 104 могли двигаться свободно. Таким образом, перчатка данных 108 разжимается при уменьшении силы сжатия оператора.
На фиг. 8 показано поперечное сечение шара восстанавливаемой формы 101. Так как шар 101 содержит штырьки 104, расходящиеся радиально, он может отображать более реальное ощущение хватания. Напряжения последовательно прикладываются к штырькам (заштрихованные части), как будто пальцы сходятся, чтобы коснуться виртуального объекта 109 (в данном случае - твердый прямоугольник).
Так как устройство отображения силы (фиг. 8) имеет очень высокую степень свободы, оно может отображать ощущения касания и хватания виртуального объекта не только кончиками пальцев, но также и подушечками пальца и ладонью. В частности, так как пальцы не скованы так, как если бы были механически обернуты в оболочку, перчатку удобно носить. Кроме того, так как устройство отображения силы компактно, его можно легко перемещать в реальном пространстве при использовании.
При использовании дисперсного электрореологического флюида, в котором частицы ионообменной смолы (выпускаемой Химической Корпорацией Mitsubishi, MCI типа gel. K08P,Na с диаметром частицы 3 мкм и содержанием воды около 6 весовых %) распределены в силиконовом масле (критическая температура растворения 100oC) с плотностью частиц 30 объемных %, можно получить ощущение хватания, близкое к реальному при хватании твердого виртуального объекта. С другой стороны, при использовании гомогенного электрореологического флюида, составленного из жидкокристаллического силикона (Asahi Химическая промышленность Ltd., опытный образец ADOI), хорошее ощущение достигается при хватании мягкого виртуального объекта для достижения ощущения рукопожатия.
Хотя система виртуальной реальности в этом варианте воплощения реализует пассивный дисплей силового ощущения без использования системы возбуждения, она может воспроизводить более тонкую силу, чем известные системы, использующие давление воздуха. Кроме того, возможно без использования волоконно-оптического датчика 2 двигать пальцами, координируя устройство отображения силы с другим устройством отображения ощущения типа устройства отображения речи. В этом случае приложение напряжения к электрореологическому флюиду 106 осуществляется на базе данных и программе, сохраненных в компьютере 4. Оператор, слушая голоса и наблюдая изображения, отображаемые в блоке отображения изображения 3, двигает его или ее пальцы. Такие системы служат в качестве безопасного воспроизводящего устройства кончиков пальцев или обучающего устройства тонких (осторожных) действий, которые могут использоваться, чтобы изучать тонкие действия на увеличенном изображении, или действия, требующие деликатной силы при хватании.
Пример 2 (Второй вариант воплощения)
На фиг. 9 изображено поперечное сечение системы телеприсутствия второго
варианта
воплощения. Этот вариант представляет пример применения системы виртуальной реальности к системе имитации вождения автомобиля. Система имитации меняет изображения виртуального вождения в
ответ на
действия рук, чтобы соответствующим образом обеспечить ощущения силы рулевого колеса.
На фиг. 9 диск 111 прикреплен перпендикулярно к валу свободно вращающегося рулевого колеса 110 и вставлен параллельно между двумя верхним и нижним дисками 112 и 113, оставляя зазоры в 1 мм. Рулевое колесо 110 имеет диаметр 320 мм. Диск 111 представляет собой алюминиевый диск диаметром 250 мм, и диски 112 и 113 представлены в виде алюминиевого диска диаметром 200 мм. Электрореологический флюид 106 заполняет зазоры между диском 111 и между двумя фиксированными дисками 112 и 113. Кроме того, независимые электрические поля прикладываются к флюиду, заполняющему зазор между диском 111 и фиксированным диском 112, и к электрореологическому флюиду, заполняющему зазор между диском 111 и фиксированным диском 113.
Изображения виртуального вождения автомобиля возникают на дисплее 3 на основе базы данных и программы, которые вводятся в компьютер 4 заранее. Сигналы из датчика 2 для определения положения рук с колесом рулевого управления из датчика 2a для определения ускорения и торможения подаются обратно в компьютер 4, так, чтобы изображения менялись в ответ на действие. Напряженность электрических полей, которые должны прикладываться к электрореологическому флюиду 106, рассчитывается компьютером 4 вместе с изображением, ускорением и торможением. Компьютер 4 управляет электрическими полями, прикладываемыми к электрореологическому флюиду 106, в соответствии с расчетной напряженностью электрических полей, изменяя сопротивление потока электрореологического флюида 106. В результате рулевое колесо 111 может дать ощущение силы.
При использовании электрореологического флюида на жидкокристаллическом силиконе, проявляющем свойства Ньютоновского потока, который используется в первом варианте воплощения, достигается превосходное воспроизведение ощущений, когда рулевое колесо 110 вращается внезапно быстро или замедляет вращение. С другой стороны, при использовании электрореологического флюида на основе частиц ионообменной смолы, проявляющего свойства текучей среды Bingham, достигается хорошее воспроизведение ощущения сильного действия рук при медленной езде или ощущения слабого действия рук. С другой стороны, при использовании электрореологического флюида на основе жидкого силикона между диском 111 и верхним диском 112 и электрореологического флюида на основе ионообменной смолы между диском 111 и более низким диском 113 получается очень яркое (живое) ощущение, близкое к реальному, при управлении независимо приложенными напряжениями в ответ на действие рук, даже в этом пассивном отображении силового ощущения.
Пример 3 (Третий вариант воплощения)
На фиг.
10 изображена
блок-схема устройства отображения силы системы телеприсутствия, третий вариант. Этот вариант является примером системы телереальности, которая действует на удаленный объект захватом
робота. Показан
принцип действия устройства отображения силы. В системе телереальности использована гидравлическая система с электрореологическим флюидом 106 в качестве циркулирующей жидкости для
управления
направлением силы выхода поршня путем изменения напряженности электрического поля, приложенного к электрореологическому флюиду 106, отображая выход поршня к манипулятору со стороны
оператора как
ощущение силы. Электрореологический флюид 106 управляется следующим образом: он вытекает из насоса 114, циркулирует по мосту Уитстона 115 и возвращается в бак 116.
На фиг. 11 показано поперечное сечение конструкции моста Уитстона 115. Мост Уитстона 115 включает поршень 121 и четыре клапана электрореологической текучей среды 117, 118, 119 и 120, каждый из которых имеет электроды типа двойного цилиндра. Поршень 121 легко двигается под управлением напряжений, приложенных к четырем клапанам. Например, поршень 121 опускается при закрывании клапанов 117 и 119 путем приложения к ним напряжений для увеличения вязкости электрореологического флюида в этих клапанах и при открывании клапанов 118 и 119 без приложения какого-либо напряжения, а только за счет циркуляции электрореологического флюида 106. Наоборот, поршень 121 поднимается при снятии напряжений, приложенных к клапанам 117 и 119, и приложением напряжений к клапанам 118 и 120. Управляя приложенными напряжениями, можно свободно управлять направлением перемещения, скоростью и силой поршня 121. Максимальная сила поршня 121 определяется эффективностью насоса 114 и электрореологической текучей среды 106.
На фиг. 12 показано устройство отображения силы, использующее мост Уитстона типа поршня 121. Места пальцев (напальчники) (или место пальца и место большого пальца) 145 прикреплены к концам цилиндра 144 и к стержню поршня 121a. Устройство отображения силы 1 связано с компьютером 4, как устройство отображения силы 1 (фиг. 11).
Тактильное ощущение от отдаленного объекта может передаваться оператору путем формирования сигнала из датчика давления 6, прикрепленного к захвату робота 5, согласованного с движением поршня 121, при передаче изображения удаленного объекта камерой 7, чтобы отображать их на модуле отображения изображения 3.
Мост Уитстона 115 (фиг. 10) может быть выполнен компактным, используя тонкие гибкие трубопроводы, при этом много мостов Уитстона может быть обеспечено электрореологическим флюидом от одного насоса. Следовательно, в этом способе можно использовать простое, компактное устройство отображения силы, посредством которого можно получать ощущения от телереального мира, имеющего много степеней свободы, с большой достоверностью. Система телереальности, в соответствии с настоящим воплощением, имеет преимущество в том, что она превосходит в быстродействии, в отображении силового ощущения с ощущением реального присутствия и в создании системы, намного более компактной, чем известные системы, которые управляют давлением масла или давлением воздуха при помощи механических жидкостных клапанов.
Пример 4 (Четвертый вариант воплощения)
На фиг. 13
изображен пример, который используется
для создания системы имитации вождения автомобиля, в которой отображается активное ощущение силы. Система имитации вождения автомобиля во втором варианте
воплощения отображает пассивное ощущение силы
(фиг. 9), а настоящее воплощение отображает активное ощущение силы.
К валу 122 рулевого колеса 110 прикреплены верхний и нижний диски 124, к каждому из которых присоединен цилиндрический электрод 123. Вал 122 снабжен подшипниками 125 в двух местах снизу и сверху. Два фланца 127, верхний и нижний, имеющие кольцеобразный глубокий паз (желоб) 126, накручены на вал 122 с помощью подшипников 125a. Каждый из цилиндрических электродов 123 вращаясь вставляется в глубокий паз 126 в фланце 127 с зазором шириной 1,0 мм между электродом и внутренней стенкой глубокого паза 126. Соответствующие фланцы 127 соединены с двигателем 129 приводными ремнями 128 так, что два фланца вращаются в противоположных направлениях с одинаковой скоростью.
Определенное количество электрореологического флюида 106 заполняет промежутки между глубокими пазами 126 и цилиндрическими электродами 123, а на верхний и нижний цилиндрические электроды подаются независимые напряжения. Кроме того, к нижнему концу вала 122 присоединен датчик ускорения 2 для определения положения и движения рулевого колеса 110 в виде сигнала углового и вращательного ускорения.
Когда верхний и нижний фланцы вращаются с одной скоростью двигателем 129 без приложения какого-либо напряжения к цилиндрическим электродам 123, в верхнем и нижнем электродах 123 возникают вращательные силы в противоположных направлениях и одинаковой величины, не создавая вращательной силы в рулевом колесе 110. Если напряжение прикладывается только к верхнему цилиндрическому электроду 123, вязкость электрореологического флюида 106, введенного в верхний глубокий паз, увеличивается так, что рулевое колесо вращается пропорционально увеличению вязкости. Наоборот, если напряжение прикладывается к нижнему цилиндрическому электроду 123, рулевое колесо 110 вращается в противоположном направлении.
Управляя напряжениями, приложенными к верхнему и нижнему цилиндрическим электродам 123, можно легко управлять направлением и силой вращения рулевого колеса 110. В частности, так как силу инерции можно уменьшить, используя легкий материал для цилиндрических электродов 123 и фланцев 127, возможно создавать вращательную силу рулевого колеса 110 с нужным ускорением или колебаниями нужной частоты.
Ощущения силы отображаются оператору путем расчета напряжений, которые следует приложить к устройству отображения силы 1 компьютером 4 в ответ на сигнал датчика 2 и сигнал, который будет подаваться в блок отображения изображения 3 имитатора вождения, а также путем подачи расчетного напряжения на цилиндрические электроды 123. Это позволяет дать возможность оператору ощутить силу с более высокой степенью реальности, чем в системе имитации вождения автомобиля второго варианта воплощения. Изображения в блоке отображения изображения 3 производятся с помощью компьютерной графики и изменяются в ответ на сигналы датчиков, связанных с ускорением и торможением наряду с другими сигналами.
Пример 5 (Пятый вариант воплощения)
На фиг. 14 и 15 показаны две
схемы систем телеприсутствия. На фиг. 14 показан общий
вид устройства отображения силы 1, которое может отображать ощущение силы на плоскости X-Y, а на фиг. 15 изображена блок-схема системы
виртуальной реальности. В устройстве отображения силы 1
использовано параллельное сцепление, имеющее два блока, к каждому из которых присоединен шкив 131 вместо колеса 110, как было на фиг. 13.
Камеры 132 (фиг. 14) электрореологического флюида заполнены электрореологическим флюидом 106. Камеры 132 сконструированы так, что электрореологический флюид 106 заполняет промежутки между глубоким пазом, образованным во фланце 127 (не показан), и цилиндрическим электродом 123 (не показан), введенным в паз. Таким образом, камеры 132 изменяют выходные вращающие моменты двигателей 129 в ответ на приложенные напряжения и передают измененные вращающие моменты на шкивы 131.
Шкивы 131a и 131b присоединены к двум звеньям 133 и 134 из четырех звеньев, составляющих параллельные звенья, которые образуют параллелограмм. Шкивы 131a и 131b связаны со шкивами 131 посредством ремней 128 для передачи сил вращения к смежным шарнирам 133 и 134 параллельного сцепления. Шарниры 133 и 134 прикреплены с возможностью поворота к двойному коаксиальному валу 135. Четыре звена параллельного сцепления связаны друг с другом, и рычаг 136 закреплен напротив вала 135. Рычаг 136 может легко двигаться в плоскости X-Y вокруг вала 135 в диапазоне, ограниченном длиной звеньев, когда никакая сила вращения не передается из шкивов 131.
С другой стороны, когда сила вращения передается от обоих или от одного из шкивов 131 камер электрореологического флюида 132 к шкивам 131a и/или 131b параллельного сцепления, звенья 133 и/или 134 поворачиваются так, что сила передается к рычагу 136, таким образом перемещая рычаг 136.
Датчик 2 определяет угол и угловое ускорение звеньев 133 и 134 вокруг вала 135, т.е. обеспечивает на выходе сигнал положения и скорости перемещения звеньев 133 и 134.
На такой установке величина и направление сил, передаваемых к рычагу 136, может управляться посредством приложения напряжений, рассчитанных компьютером 4, к камерам 132 электрореологического флюида в ответ на положение и перемещение рычага 136 при вращении двух двигателей 129 с постоянной скоростью.
Например, допустим, что рычаг 136 является ручкой двери виртуальной комнаты, отображаемой в блоке отображения изображения 3, ощущение силы, когда дверь открывается и закрывается, может передаваться через рычаг 136. Точнее, данные, связанные с деликатным ощущением силы в соответствии с движением двери и с колебаниями, когда дверь ударяется о стену, закладываются в компьютер заранее, и напряжения, рассчитанные компьютером 4, прикладываются к камерам электрореологического флюида.
Пример 6 (Шестой вариант воплощения)
На фиг. 16 показана схема шестого варианта воплощения
системы телеприсутствия.
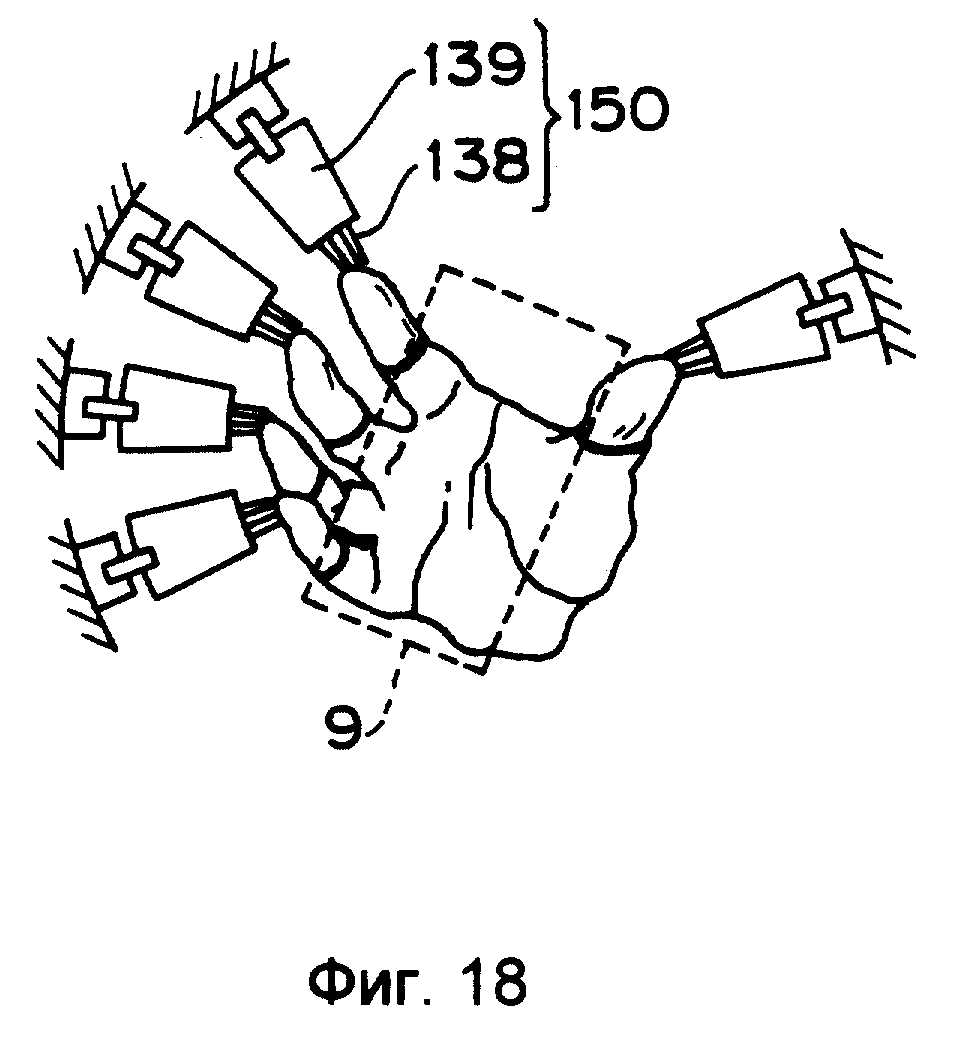
На фиг. 17 показаны параллельные электроды 139, и фиг. 18 изображает положение, в котором виртуальный объект 9 хватает предмет большим и четырьмя остальными пальцами. В этом варианте воплощения оператор получает ощущение силы на пальцах тогда, когда он держит виртуальный объект 9. Устройство 1 отображает ощущение силы путем изменения вязкости электрореологического флюида при управлении напряженностью электрического поля, приложенного к электрореологическому флюиду.
На большом пальце и остальных пальцах закреплены электродные блоки 150, каждый из которых содержит металлические пленочные электроды 138 и металлические пластинчатые параллельные электроды 139. Одни концы металлических электродов 138 соединены с тыльной стороной пальцев посредством металлических изолированных камер 137, и вторые концы вводятся глубоко в пространство между плоскопараллельными электродами 139. Плоскопараллельные электроды 139 снабжены тонким изоляционным синтетическим нетканым материалом, приклеенным к их поверхностям, который служит в качестве прокладок 105. Прокладки 105 изолируют металлические пленочные электроды 138 и плоскопараллельные электроды 139 и также поддерживают величину зазоров постоянной. Кроме того, электрореологический флюид 106 заполняет зазоры между металлическими пленочными электродами 138 и плоскопараллельными электродами 139.
Независимые напряжения, рассчитанные компьютером 4, подаются между металлическими пленочными электродами 138 и плоскопараллельными электродами 139, управляя таким образом напряженностью электрических полей, приложенных к электрореологическому флюиду 106. Кроме того, движения пальцев детектируется датчиком положения 2, и выходной сигнал датчика 2 подается обратно в компьютер 4.
В таком устройстве силовые ощущения при хватании виртуального объекта 9, произведенные в блоке отображения изображения 3 с помощью компьютерной графики, отображаются оператору путем подачи на электроды 138 и 139 напряжений, рассчитанных компьютером 4, в ответ на движение пальцев.
Хотя для этого способа трудно отображать активные ощущения силы, способ может предоставить три степени свободы в трех направлениях, т.е. вверх и вниз, направо и налево и вокруг оси, перпендикулярной к горизонтальной плоскости. Силы на пальцах, т.е. отображенные силы, действуют в направлениях, перпендикулярных подушечкам пальцев. Чтобы производить нужные силы отображения известными манипуляторами типа устройств отображения, необходимо отдельно управлять возбудителями (приводами), используя матрицу преобразования, что усложняет систему. Данное устройство отображения силы может отображать ощущения, возникающие, когда оператор держит объекты сложных форм в различных формах хватания без всякого специального управления, поскольку сопротивление потока и отображаемые силы приблизительно одинаково направлены, так как металлические пленочные электроды 138 поддерживаются перпендикулярно пальцам.
Пример 7 (Седьмой вариант воплощения)
На фиг. 19 показано устройство отображения силы, где
каждый электродный блок 150 содержит металлические пленочные электроды 138,
плоскопараллельные электроды 139 и электрореологический флюид 106, заполняющий зазор между ними. Датчик силы (датчик
искажения) 2 прикреплен к каждому из металлических пленочных электродов 138 возле
пальца, и двигатель 129 установлен на электродном модуле 150 в положении возле запястья.
В этом варианте устройства отображение активных силовых ощущений может выполняться путем управления с обратной связью приложенными напряжениями к электрореологическому флюиду 106 и движением плоскопараллельных электродов 139 в ответ на информацию от датчиков силы 2. Так как активные ощущения при удерживании пальцами виртуального объекта 9 сначала отображаются при разжимании пальцев, то могут отображаться многие состояния, хотя степени свободы двигателя 129 ограничены до одной степени свободы на каждый палец.
Шестой вариант воплощения, описанный выше, имеет недостаток, заключающийся в том, что металлические пленочные электроды 138 при сгибании пальцев постепенно вытягиваются из плоскопараллельных электродов 139, таким образом уменьшая эффективные участки электродов. Чтобы это исправить, необходимо каждый момент подстраивать напряженность электрических полей, приложенных к электрореологическому флюиду 106, путем измерения длины металлических пленочных электродов 138, или устанавливать очень длинные металлические пленочные электроды 138. Описываемый вариант воплощения позволяет решить эту проблему, так как электродные блоки 150 могут сдвигаться двигателем 129. Возможно осуществлять управление таким образом, чтобы эффективные площади электродов сохранялись настолько большими, насколько возможно, и почти постоянными, путем определения величин сгибания пальцев датчиками 2б, прикрепленными к металлическим пленочным электродам 138, и путем управления положениями электродных блоков 150 двигателем 129. Здесь в качестве датчиков положения 2б могут использоваться светодиоды.
Пример 8 (Восьмой вариант
воплощения)
На фиг. 20 изображена блок-схема восьмого варианта воплощения системы
телеприсутствия, применяемой для ловли рыбы. Оператор подводит крючок ко рту выбранной рыбы, отображенной в
блоке отображения изображения 3, регулируя удочку 142. Крючок синхронизируется компьютером
4 с изображением в блоке отображения изображения 3. Точнее, компьютер включает базу данных и программу так,
что, когда крючок достаточно близко приблизился ко рту рыбы, она начинает клевать наживку,
и в ответ на действие рыбы могут быть получены ощущения подсекания и рывка.
Оно может отображать реально ощущения рывка в зависимости от вида и размера рыбы, используя датчик натяжения 2 и устройство отображения силы 1, применяющие электрореологический флюид, даже если используется короткая жесткая удочка. Например, может использоваться устройство отображения силы, которое регулирует натяжение, изменяя передаваемый вращающий момент, управляя напряженностью электрического поля, приложенного к электрореологическому флюиду, заполняющему зазор между двумя параллельными вращающимися дисковыми электродами.
Промышленная применимость
Настоящее изобретение
относится к системе, в которой сопротивление потока электрореологического
флюида синхронизируется с изображениями (виртуальный мир), генерируемыми компьютером, или с телереальным миром
(телеприсутствие), который реально существует и с которым можно контактировать
посредством робота так, что силовые ощущения отображаются оператору. Можно в простом и компактном устройстве добиться
отображения движений с множеством степеней свободы с ощущением реальности. Эта
система может использоваться в различных областях: при проектировании, образовании, обучении, развлечениях, рискованных
экспериментах (опасные операции),
микроманипулировании/супермикроманипулировании, и в системе виртуальной реальности или телереальности. Например, она может применяться для ходьбы на лыжах, рыбалки,
полетов, морских прогулок,
бейсбола, велосипедной езды и т.п. При обучении она может применяться для обучения вождению автомобиля, для работы в космосе, для стандартизации квалифицированных работ; для
проведения рискованных
экспериментов или микроманипулирования при обработке ядерного материала, для глубоководных операций, при изготовлении, сборке и обработке мелких деталей; в медицине для
восстановления мышечной силы,
для операций под аппаратным контролем; для проектирования ручного управления оборудования или мебели. Более того, устройство отображения силы в соответствии с настоящим
изобретением служит в качестве
одного из основополагающих способов мультимедиа (комплексного представления информации) с использованием быстродействующих сетей передачи данных: оно служит как
устройство ввода/вывода терминалов
информации (устройств для взаимодействия оператора с компьютерной системой) типа мыши, клавиатуры, дисплея или говорящего устройства, в то же время делая возможным
передачу информации о приятных
чувствах, таких как прикосновение, пожатие или трение, дополнительно к обычно передаваемой информации как характер, изображение или голос.
Реферат
Изобретение относится к осуществлению виртуальной реальности или телереальности. Технический результат, достигаемый в изобретении, заключается в повышении эффекта телеприсутствия. Система виртуальной реальности или телереальности отображает пользователю изменения в ощущениях силы, вызванные изменением сопротивления потока электрореологической текучей среды, путем согласования в реальном времени сопротивления потока, которое изменяется в ответ на напряженность электрического поля, приложенного к электрореологической текучей среде, с изображением виртуального мира, генерируемым компьютером, или с реально существующим миром, с которым пользователь связан с помощью робота. 7 з.п. ф-лы, 20 ил.

Комментарии