Способ текущей цифровой выверки прицелов с компенсацией положения прицельной марки на величину изгиба канала ствола - RU2725677C2
Код документа: RU2725677C2
Чертежи

Описание
Изобретение относится к области бронетанкового вооружения и может быть использовано для автоматизации выверки нулевых линий прицеливания прицелов с вооружением на танках, боевых машинах пехоты, бронетранспортерах, артиллерийских системах и наземных роботизированных, в том числе автономных и дистанционно управляемых разведывательно-ударных комплексах военного назначения, и т.п. Изобретение рассчитано прежде всего на современные прицелы с цифровыми оптико-электронными системами и прицеливания видеонаблюдения. Реализация предлагаемого способа возможна при разработке новых и в ходе модернизации существующих систем управления огнем образцов БТВ и в целом повысит их эффективность.
Прицелы современных образцов бронетанкового вооружения (БТВ) как правило имеют оптико-электронные системы, предназначенные для преобразования невидимого для человеческого глаза излучения в электрический сигнал, на основании которого затем формируется видимое для оператора изображение. На сегодняшний день в составе прицелов БТВ наиболее распространены тепловизионные оптико-электронные системы (тепловизоры), также активно применяются приборы ночного видения и телевизионные камеры.
При этом независимо от спектрального диапазона, в котором работает прицел, любая его оптико-электронная система имеет объектив, предназначенный для формирования резкого изображения и фотоприемное устройство (ФПУ) для преобразования излучения в электрический сигнал. В современном исполнении роль ФПУ как правило выполняют фото-матрицы, например, ПЗС, ПЗИ, или болометрические и т.п.
Это позволяет оптико-электронную часть любого прицела рассматривать как некоторую видеокамеру (Фиг. 1) 1 j-го прицела, где j - порядковый номер прицела, в которой получаемое с нее цифровое изображение 3 может быть отождествлено с реальным физическим изображением, сфокусированным ее объективом в задней фокальной плоскости на ФПУ (фото-матрице).
Цифровые изображения 3 получаемые с камеры 1 j-го прицела, состоят из пикселей. Каждый пиксель характеризуется значением, которое состоит из полутонового значения или цветового значения. В полутоновых изображениях значение пикселя представляет собой одну величину, которая характеризует яркость пикселя. Наиболее общим форматом описания пикселя является байт изображения, в котором значение пикселя представлено восьмиразрядным целым числом, лежащим в диапазоне возможных значений от 0 до 255. Как правило, значение пикселя, равное нулю, используют для обозначения черного пикселя, а значение 255 используют для обозначения белого пикселя. Промежуточные значения описывают различные оттенки полутонов. В цветных изображениях для описания каждого пикселя (расположенного в цветовом пространстве размерности RGB - красный, зеленый, синий) должны быть отдельно определены красная, зеленая и синяя компоненты. Иными словами, значение пикселя фактически представляет собой вектор, описанный тремя числами. Три различные компоненты могут быть сохранены как три отдельных полутоновых изображения, известные как цветовые плоскости (по одной для красного, зеленого и синего цветов), которые можно воссоединять при отображении или при обработке.
Цифровое изображение 3 своим геометрическим центром 6 принимают размещенным на оптической оси объектива в положительном направлении оси



Если в поле зрения камеры 1 находится объект 4 (Фиг. 1), то на цифровом изображении 3 изображению 5 этого объекта будет соответствовать пиксель, положение которого в пиксельной СК изображения 3 будет характеризоваться номером строки


На основании пиксельных координат изображения 5 объекта 4 на цифровом изображении 3 камеры 1 могут быть вычислены углы





где

Nj и Mj - горизонтальное и вертикальное разрешение изображения 3;
с0,с1,с2,…cq и d0,d1,d2,…dq - полиномиальные коэффициенты прямого преобразования функций

Если известны углы






где

Переход от пиксельной СК изображения 3 к трехмерной СК 2

где



Для обратного перехода применяется выражение
где

Применение полиномов прямого (1), (2) и обратного (3), (4) преобразования обеспечивает установление математической связи между пиксельными координатами

В процессе боевой и повседневной работы в образцах БТВ от дорожно-транспортных и стрельбовых возмущений происходит сбивание выверки (рассогласование) прицелов с вооружением. Рассогласование иногда может достигать 1,5 мрад. Такое сбивание выверки составляет большую погрешность технической подготовки стрельбы. И с целью его исключения, во всех случаях перед стрельбой проводится подготовка комплекса вооружения, составляющей частью которой является подготовка к работе и выверка приборов прицеливания и наблюдения (далее выверка).
Выверка осуществляется при поступлении вооружения в подразделение, после ремонта, замены частей, которые могли бы изменить бой вооружения, при обнаружении во время стрельбы отклонений снарядов, пуль, не удовлетворяющие требованиям нормального боя. Качественно проведенная выверка обеспечивает точность стрельбы из вооружения по целям на разных дистанциях. Поэтому все вооружение, находящееся в подразделениях, должно быть всегда приведено к нормальному бою и иметь выверенные прицелы. В боевой обстановке должны быть использованы все возможности для выверки прицелов и приведения вооружения к нормальному бою. Поэтому важным является обеспечение максимальной точности, простоты и быстроты выверки.
Аналогом к изобретению является способ выверки нулевой линий прицелов по КВМ или удаленной точке с использованием оптической трубки (специальной конструкции для различного вооружения) [Приведение вооружения танков, БМП, БТР и стрелкового оружия к нормальному бою [Текст]: Учебное пособие / И.Ю. Слесаренко, Ю.С. Мальцев, А.В. Елизаров. - Омск: ОАБИИ, 2015. - 153 с.], которую перед проведением выверки устанавливают в ствол со стороны дульного среза или со стороны казенника так, чтобы ее оптическая ось после размещения была совмещена с осью канала ствола. Если оптическую трубку устанавливают в казенной части ствола, то на его срезе дополнительно закрепляют по специальным рискам перекрестие из нитей для определения направления оси канала ствола.
Выверка проводится для каждого прицела отдельно. При этом выбирают в поле зрения выверяемого прицела хорошо видимую с четким контуром точку 16 (фиг. 3) удаленную от среза канала ствола вооружения на расстоянии

Очевидными недостатками аналога являются следующие:
- привлечение для проведения выверки по крайней мере двух заранее обученных порядку проведения выверки членов экипажа;
- все мероприятия выполняются человеком, требуют определенных навыков и квалификации, команды подаются голосом или жестами, в связи с чем достаточно велики временные затраты на проведение выверки, а также имеет место влияние на точность результата субъективных ошибок привлекаемых специалистов;
- необходимость предварительного создания условий проведения выверки, заключающегося в поиске удаленной точки на местности, находящейся четко на заданной для данного прицела дальности или установки КВМ на установленной дистанции;
- выверка всех прицелов образца вооружения, только частично может допускать параллельное проведение операций.
Все это затрудняет проведение выверки на привалах, коротких остановках и т.д.
Еще одним аналогом завяленного изобретения является способ выверки нулевой линии прицела танка [Патент RU 2231731 C1, F41G 3/32, 2003 г.], включающий наведение ДОКС пушки на КВМ или удаленную точку и визирование этого положения через зрительную трубку с последующей регулировкой положения оси прицеливания винтами выверки, отличающийся тем, что зрительную трубку постоянно и жестко закрепляют на дульной части пушки и ось которой предварительно, при монтаже пушки в танк, согласуют с ДОКС пушки, при этом изображение ДОКС через оптоволоконный кабель и призму подают в прицел с возможностью включения и выключения выверки поворотом призмы.
Данный способ позволяет существенно сократить время на проведение выверки. Выверка может проводится одним членом экипажа без использования дополнительного специального оборудования. Повышается точность выверки без всяких предварительных настроек и регулировок. Однако все мероприятия при проведении выверки по-прежнему выполняет человек, соответственно время и точность выверки будет определяться его навыками и субъективными ошибками. Одним человеком выверка может проводиться только последовательно для всех прицелов. Также не устранена необходимость предварительного создания условий проведения выверки, заключающаяся в выборе удаленной точки и установке КВМ на требуемых дистанциях.
В качестве прототипа выбран способ автоматической выверки нулевых линий прицеливания оптико-электронных каналов прицелов бронетанкового вооружения [Патент RU 2695141 C1, F41G 3/32, 2019 г.], заключающийся в установке в дульной его части вооружения соосно с его ДОКС цифровой камеры, приеме изображений с выверяемых прицелов и камеры на вооружении, указании уделенного объекта или КВМ на изображении одного из прицелов, измерении дальности до него и автоматическом наведении вооружения на указанный объект с одновременным вычислением положений ЦПМ для установленных дальностей выверки в полях зрения всех выверяемых прицелов.
Данный способ позволяет исключить из процесса выверки прицелов операций, выполняемых «вручную» привлекаемыми специалистами по пространственной ориентации ДОКС пушки и ЦПМ, устранить влияние на процесс выверки уровня квалификации и субъективных ошибок операторов, исключить из процесса выверки требований по соблюдению определенной дистанции до удаленной точки и КВМ и обеспечить одновременность проведения выверки для всех прицелов образца вооружения.
Недостатки прототипа заключаются:
- в необходимости применение дополнительного оборудования в виде камеры и устройства ее крепления на вооружении;
- в неполной автоматизации всего процесса выверки. Так операции по установке камеры на вооружении и по ее снятию остаются ручными.
Кроме этого общим недостатком для прототипа и аналогов является то, что выверка прицелов проводится по «холодному» вооружению до начала стрельб. При активном же ведения огня, особенно в движении на ствол действуют как динамические, так и температурные нагрузки. Это приводит к тому, что ДОКС вооружения на момент начала производства выстрела может иметь некоторое угловое рассогласование относительно своего «холодного», т.е. расчетного положения. Для измерения данного рассогласования и его учета при вычислении установок для стрельбы на современных образцах БТВ применяются устройства контроля изгиба ствола. Задача таких устройств заключается в вычислении величины изгиба ствола по лазерному лучу, отраженному от специального оптического блока, выполняющего функцию отражателя и устанавливаемого на дульной части канала ствола. Устройства контроля изгиба ствола вполне надежные и точные устройства, но они строго ограничены выполнением только одной функции и являются дополнительным оборудованием для без того достаточно сложных современных систем управления огнем.
Таким образом, задачами, на решение которых направлено заявляемое изобретение, являются:
во-первых, полная автоматизация процесса выверки;
во-вторых, исключение из процесса выверки применения дополнительного (временно устанавливаемого, а затем снимаемого) оборудования и оснастки;
в-третьих, учет при проведении выверки действительного на момент производства выстрела положения в пространстве ДОКС.
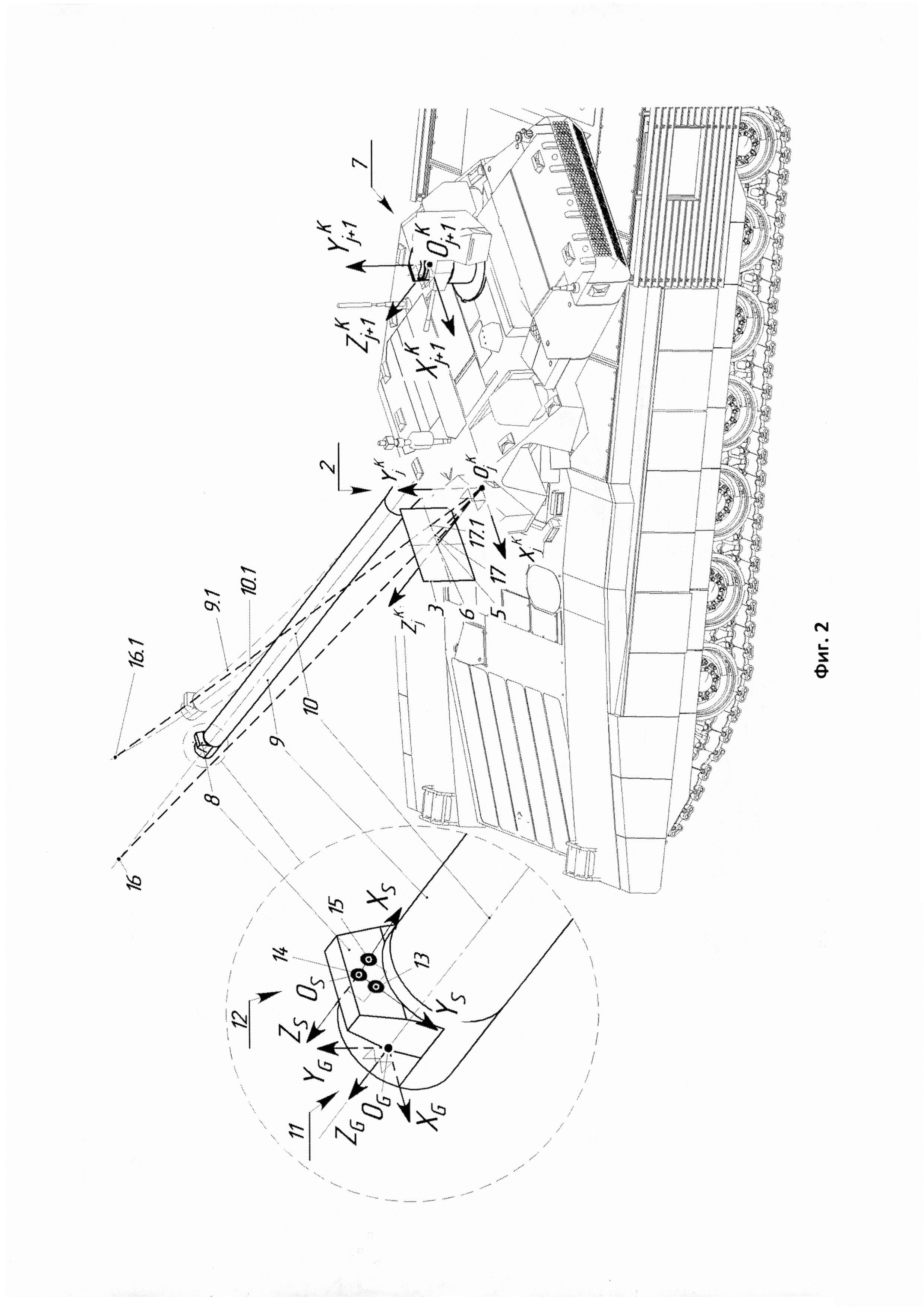
Решение первой и второй задач определяется тем, что в дульной части вооружения 9 на его наружной стенке монтируется жестко связанная с пушкой площадка 8 с (по крайней мере) тремя маркерами. На схеме (фиг. 2) в качестве примера показан вариант внешнего вида такой площадки с маркерами 13, 14 и 15, которые определяют в пространстве положение и направление осей OSXS и OSYS прямоугольной СК 12 OSXSYSZS жестко связанной с СК 11 OGXGYGZG вооружения. При этом СК 11 OGXGYGZG вооружения своим центром OG располагается в плоскости дульного среза вооружения 9. Ось OGZG направлена строго по ДОКС 10, ось OGYG - вверх (по риске на срезе), ось OGXG - влево (по риске на срезе).
Относительно близкое расположение СК 11 и 12 и прочная механическая связь площадки 8 с пушкой 9 позволяет пренебречь возможностью присутствия механических деформаций и рассматривать их как единое целое. В таком случае по положению и ориентации в пространстве СК 12 можно оценивать положение СК 11, т.е. непосредственно действующего на данный момент положения ДОКС 10 вооружения 9. При этом сам процесс выверки не потребует применения дополнительного оборудования и оснастки, что дает возможность его полной автоматизации.
Решение третьей задачи иллюстрируется чертежом (фиг. 2), из которого следует, что если при выверке по «холодному» вооружения 9, ЦПМ 5 j-го прицела будет в процессе выверки перемещаться в точку 17 изображения 3, обеспечивая ее наведение на точку 16, находящуюся на ДОКС 10 на установленном расстоянии от дульного среза, то при изгибе вооружения 9, сам ствол займет в пространстве положение 9.1, а его ДОКС - положение 10.1. И для того, чтобы выверка сохранила текущую согласованность линии прицеливания со стволом 9.1, ЦПМ 5 в процессе выверки должна быть перемещена в положение 17.1 соответствующее наведению оси прицеливания на точку выверки 16.1.
Полная автоматизация процесса выверки и отсутствие необходимости проведения ручных манипуляций с оборудованием, связанных с покиданием боевого отделения образца БТВ, обеспечат минимизацию затрат времени на проведение выверки. В данном случае время выверки будет определяться только производительностью бортовой ЭВМ, эффективностью алгоритма и количеством обрабатываемых кадров и не превысит нескольких секунд. А это позволяет проводить периодичную выверку практически в любое время, например, в момент нахождения вооружения на линии заряжания при работе автомата заряжания, во время коротких остановок и т.д., т.е. в минимальной временной близости от момента выстрела. Таким образом, даже при наличии изгиба канала ствола ЦПМ прицела будет всегда находиться в «выверенном» положении, чем и обеспечивается учет величины изгиба при наведении вооружения и выполнение третьей задачи.
Основным техническим результатом, обеспечиваемым приведенной совокупностью признаков, являются:
- повышение точности выверки прицелов за счет дополнительного учета величины изгиба канала ствола;
- техническое упрощение системы управления огнем за счет отсутствия необходимости применения устройств контроля изгиба ствола;
- уменьшение возимого комплекта ЗИП (запасных инструментов и принадлежностей) за счет отсутствия необходимости применения дополнительной цифровой камеры, устройства ее крепления и КВМ;
- минимизация времени на проведение выверки всех прицелов образца БТВ за счет полной автоматизации данного процесса.
Для осуществления заявленного способа прицелы образца БТВ должны иметь поля зрения с углами, обеспечивающими надежный захват маркеров на площадке. В противном случае конструкция прицела должна предполагать применение (вводимой на время выверки в поле зрения прицела) преломляющей призмы, которая позволит временно изменять пространственную ориентацию поля зрения прицела на дульную часть канала ствола.
Для описания изменения положения и пространственной ориентации СК 2



где



Способ реализуется на основе цифровой обработки изображений с камер прицелов в обрабатывающей системе, являющейся, например, удаленным компьютером, таким как ноутбук или персональный компьютер (рабочая станция). Обрабатывающая система может быть выполнена как отдельное (съемное) оборудование для выверки, а также может быть встроена в СУО или комплекс вооружения и являться, например, частью прицельно-наблюдательного комплекса системы управления огнем образца БТВ. Она должна обеспечивать автоматическое распознавание изображений маркеров, вычисление их геометрических центров, положения относительно СК камеры прицела СК площадки и положения ЦПМ согласно установленной для каждого из j-ых прицелов дальностей выверки.
Обрабатывающая система содержит исполняемые модули или команды с возможностью выполнения по меньшей мере одним процессором, память для хранения данных, пользовательский интерфейс, содержащий дисплей, такой как жидкокристаллический монитор, для просмотра видеоданных и устройство управления и ввода данных, такое как клавиатура или указательное устройство для взаимодействия пользователя (оператора) с видеоданными (например, манипулятор типа «мышь», шаровой указатель, стилус, сенсорная панель или другое устройство). В качестве дисплея также может выступать видео-смотровое устройство прицела образца бронетанкового вооружения.
Площадка 8 на вооружении содержит три маркера 13, 14 и 15, расположенных под прямым углом относительно второго маркера 14. Количество, геометрическая форма и размеры маркеров могут отличаться, но при этом должны выполняться условия надежного распознавание маркеров камерами прицелов, высокоточного вычисление их центров и однозначная привязка к их структуре осей СК 12 OSXSYSZS (фиг. 2). При этом повышение точности вычислений может быть достигнуто за счет увеличения количества распознаваемых маркеров, а также за счет усреднения результатов вычислений по серии кадров. Возможно применение дополнительных средств подсветки площадки 8 при проведении выверки в ночных условиях. В случае же применения тепловизионного прицела технология изготовления площадки 8 должна обеспечивать тепловой контраст маркеров, при чем с сохранением целостности их геометрических форм.
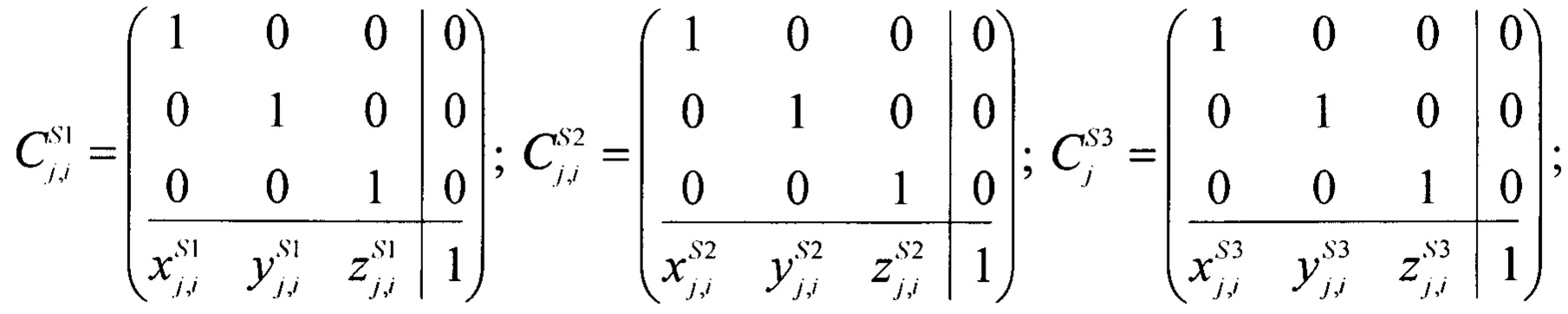
Взаимное положение СК 11 OGXGYGZG и 12 OSXSYSZS (фиг. 2) описывается матрицей перехода

где


Матрица


- установка в дульной части ствола камеры вооружения, СК которой будет совпадать с СК 11 вооружения, размещение перед камерой на вооружении (в поле ее зрения) КВМ с маркерами, аналогичными маркерам на площадке 8 (Фиг. 3);
- прием серии кадров с отдельной камеры высокого разрешения или снимков в цифровой фотоаппарат, на которых должна быть одновременно видна площадка с маркерами и КВМ в разных ракурсах;
- прием серии кадров с камеры на вооружении;
- совместная обработка изображений с камеры на вооружении и отдельной камеры (фотоаппарата) с последующим вычислением матрицы
Сущность изобретения поясняется чертежами, которые не охватывают и тем более не ограничивают весь объем притязаний данного изобретения, а являются лишь иллюстрирующими материалами частного случая выполнения, на которых:
на фиг. 1 показано взаимное положение СК камеры, цифрового изображения и объекта в пространстве;
на фиг. 2 показан вариант внешнего вида закрепленной на вооружении площадки с маркерами и взаимное положение СК прицелов, площадки и вооружения и отображена схема согласования линий прицеливания до выверки, при выверке по «холодному» вооружению, и при изгибе канала ствола;
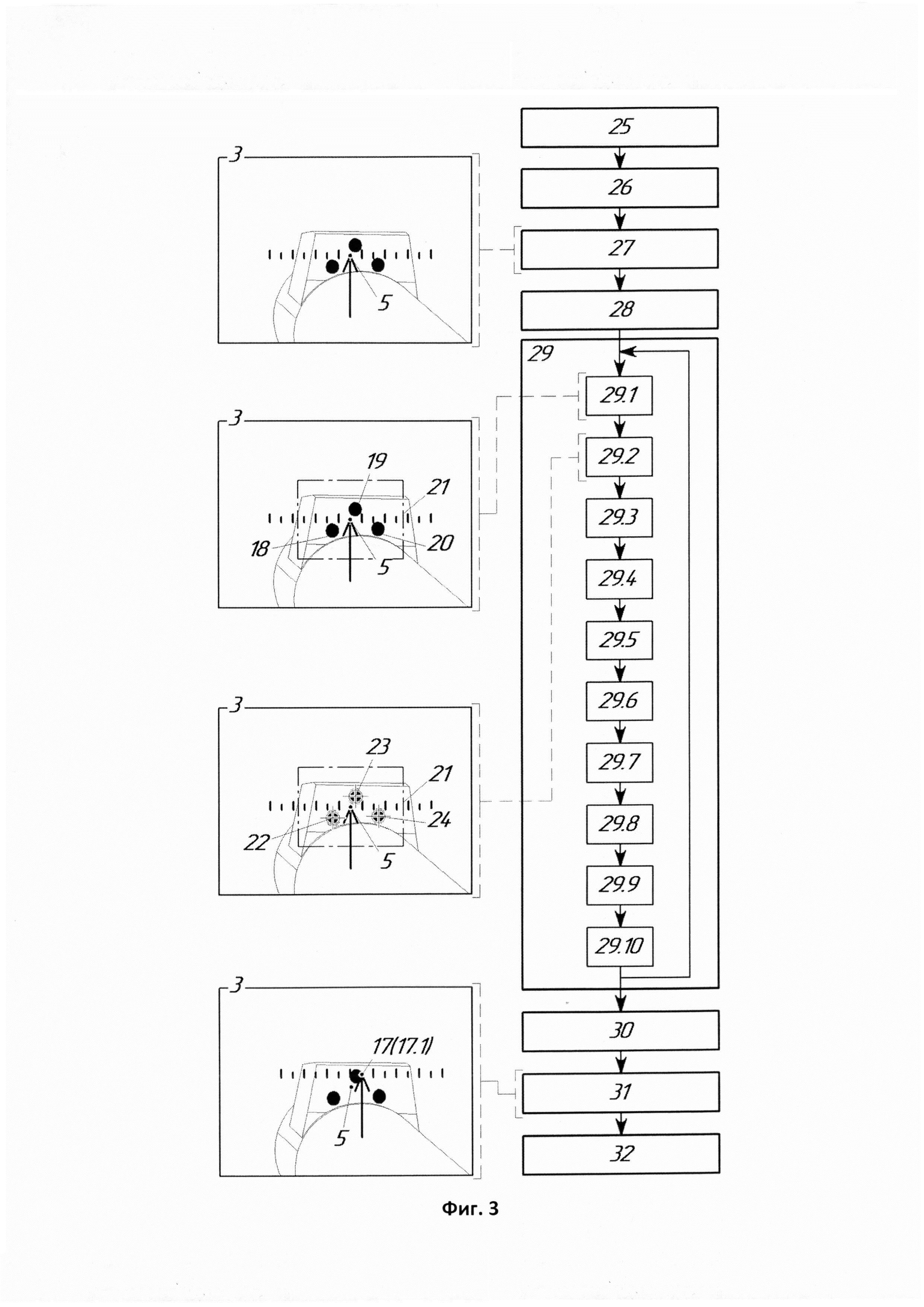
на фиг. 3 отображен порядок проведения и показаны дополнительные иллюстрации поля зрения прицела при проведении выверки заявленным способом.
Осуществляют заявленный способ следующим образом (Фиг. 3).
Оптические оси j-ых выверяемых прицелов и ДОКС вооружения приводят в горизонтальное положение (этап 25, фиг. 3).
В поля зрения прицелов вводят преломляющие призмы (этап 26, фиг. 3).
С камер каждого из j-ых прицелов принимают i-ые цифровые изображения 3 (этап 27, фиг. 3).
Из памяти обрабатывающей системы принимают данные (этап 28, фиг. 3)., включающие:
- величины разрешений Nj и Mj цифровых изображений 3 камер для j-ых прицелов;
- коэффициенты c0,c1,c2,…cq, d0,d1,d2,…dq и


- расширенные векторы
- величину кратчайшего расстояния L между первым 13 и вторым 14, вторым 14 и третьим 15 маркерами на площадке 8 вооружения 9;
- расширенные векторы

- матрицы


- матрицу

Для каждого j-го выверяемого прицела запускают цикл выверки (этап 29, фиг. 3), включающий выполнение для принятых i-ых кадров, где
- формирование прямоугольной области 21 распознавания изображений 18, 19, 21 (этап 29.1, фиг. 3) маркеров 13, 14 и 15 (Фиг. 2) на изображении 3;
- вычисление пиксельных координат

- вычисление в соответствии с выражением (5) векторов


- решение любым из известных способов системы уравнений

где


относительно неизвестных координат


- запись матриц


- вычисление действующих значений углов






где

- вычисление матрицы


где

- вычисление векторов



- вычисление векторов



- вычисление векторов


По достижению количества обработанных кадров установленного числа



Сравнивают значения вектора





Перемещают ЦПМ 5 выверяемых прицелов на рассчитанные положения 17 (17.1) согласно значений векторов
Переводят призму, оптическую ось прицела и вооружение в исходные положения (этап 32, фиг. 3), на чем текущую выверку считают завершенной.
Реферат
Способ заключается в согласовании нулевых линий прицеливания с вооружением путем вычисления на основании цифровой обработки изображений с прицелов положений их центральных прицельных марок (ЦПМ), соответствующих наведению на удаленные точки, расположенные на действующей оси канала ствола (ДОКС) вооружения на установленных для каждого выверяемого прицела дальностях. Выверку всех прицелов проводят в автоматическом режиме по трем маркерам на жестко закрепленной в дульной части на его наружной стенке площадке. Оптические оси j-ых выверяемых прицелов и ДОКС вооружения приводят в горизонтальное положение; в поля зрения прицелов вводят преломляющие призмы, обеспечивающие видимость площадки с маркерами; с камер каждого из j-ых прицелов принимают i-ые цифровые изображения, в результате обработки которых определяют векторыпиксельных координат расчетных положений ЦПМ на изображениях камер j-ых прицелов и усредняют их. Сравнивают полученные значения векторарасчетного с векторомдействующего положения ЦПМ. Значениям векторовприсваивают соответствующие значения векторови перемещают ЦПМ j-ых выверяемых прицелов на рассчитанные положения. Технический результат - повышение точности выверки прицелов, техническое упрощение системы управления огнем, уменьшение возимого комплекта ЗИП, минимизация времени на проведение выверки. 3 ил.
Формула




















































Комментарии