Способ текущей цифровой выверки прицелов с компенсацией положения прицельной марки на величину изгиба канала ствола - RU2020108612A
Код документа: RU2020108612A
Формула
Способ текущей цифровой выверки прицелов с компенсацией положения прицельной марки на величину изгиба канала ствола заключающийся в согласовании нулевых линий прицеливания с вооружением путем вычисления на основании цифровой обработки изображений с прицелов положений их центральных прицельных марок (ЦПМ), соответствующих наведению на удаленные точки, расположенные на действующей оси канала ствола (ДОКС) вооружения на установленных для каждого выверяемого прицела дальностях и
отличающийся тем, что выверку всех прицелов образца БТВ проводят в автоматическом режиме по крайней мере по трем маркерам на жестко закрепленной в дульной части вооружения на его наружной стенке площадке, при чем взаимное расположением маркеров должно точно и однозначно характеризовать положение и ориентацию в пространстве системы координат (СК) OSXSYSZS этой площадки,
при этом оптические оси j-ых выверяемых прицелов и ДОКС вооружения приводят в горизонтальное положение;
в поля зрения прицелов вводят преломляющие призмы, обеспечивающие видимость площадки с маркерами;
с камер каждого из j-ых прицелов принимают i-ые цифровые изображения;
принимают данные, включающие:
величины горизонтального Nj и вертикального Mj разрешений цифровых изображений камер для j-ых прицелов;
коэффициенты c0,c1,c2,…cq, d0,d1,d2,…dq и
 для функций прямого
для функций прямого

 и обратного
и обратного

 преобразований, где
преобразований, где
 - приведенные пиксельные координаты изображения объекта на изображении камеры j-го прицела;
- приведенные пиксельные координаты изображения объекта на изображении камеры j-го прицела;
расширенные векторы
 пиксельных координат действующих на момент начала проведения выверки положений ЦПМ на изображениях камер каждого из выверяемых j-ых прицелов;
пиксельных координат действующих на момент начала проведения выверки положений ЦПМ на изображениях камер каждого из выверяемых j-ых прицелов;
величину L, равную кратчайшим расстояниям между первым и вторым, вторым и третьим маркерами на площадке вооружения;
расширенные векторы
 со значениями дальностей
со значениями дальностей
 до точки выверки для каждого j-го прицела;
до точки выверки для каждого j-го прицела;
матрицы
 перехода от системы координат (СК)
перехода от системы координат (СК)
 камер j-ых прицелов к положениям этих же СК после введения в поля их зрения преломляющих призм в соответствии с выражением
камер j-ых прицелов к положениям этих же СК после введения в поля их зрения преломляющих призм в соответствии с выражением
где
при чем под СК
 камеры j-го прицела понимают СК с началом в точке
камеры j-го прицела понимают СК с началом в точке
 расположенной в оптическом центре объектива камеры, осью
расположенной в оптическом центре объектива камеры, осью
 направленной по оптической оси объектива, осью
направленной по оптической оси объектива, осью
 - горизонтально влево вдоль строк изображения, осью
- горизонтально влево вдоль строк изображения, осью
 - вертикально вверх вдоль столбцов изображения;
- вертикально вверх вдоль столбцов изображения;
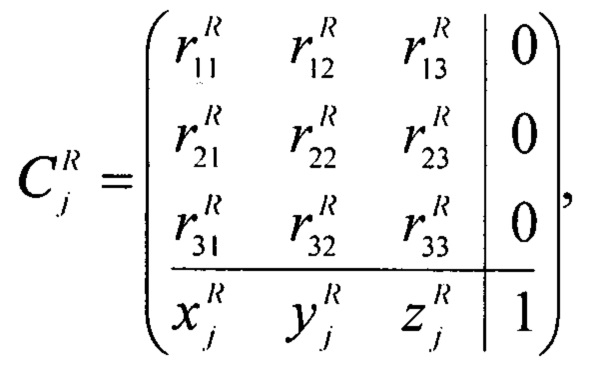
матрицу
 перехода от СК OSXSYSZS площадки к СК OGXGYGZG вооружения, согласно выражения
перехода от СК OSXSYSZS площадки к СК OGXGYGZG вооружения, согласно выражения
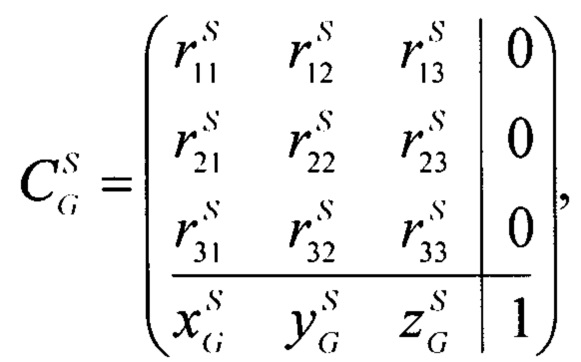
где

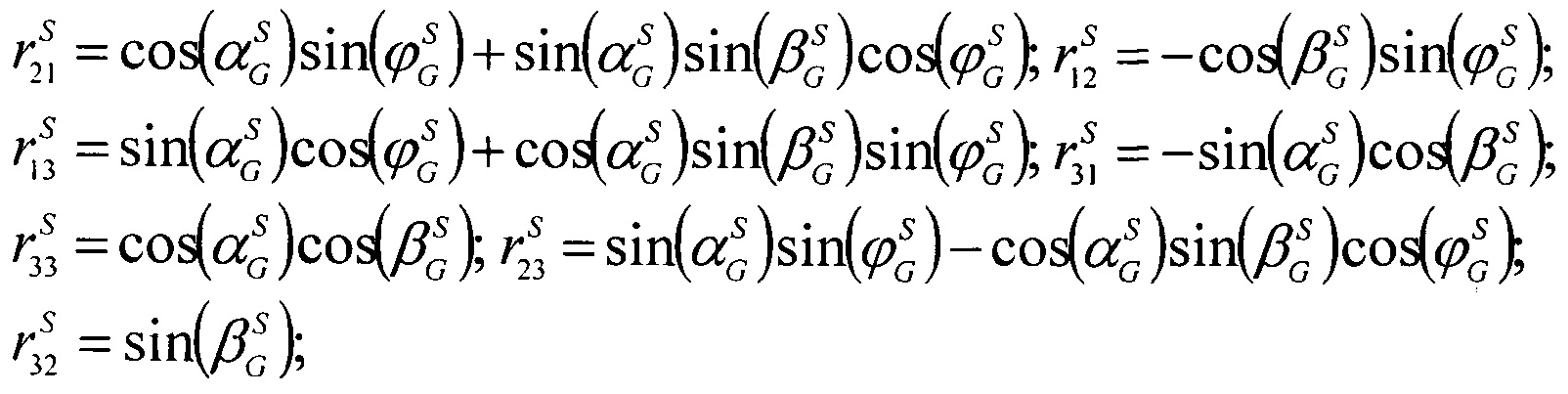
при этом под СК OGXGYGZG вооружения понимают прямоугольную СК с центром OG, расположенным в центре плоскости дульного среза вооружения, осью OGZG направленной строго по ДОКС, осью OGYG направленной вверх (по вертикальной риске на срезе вооружения), ось OGXG - влево (по горизонтальной риске на срезе вооружения),
для каждого j-го выверяемого прицела запускают цикл выверки, включающий выполнение для принятых i-ых кадров, где
 , последовательности следующих операций:
, последовательности следующих операций:
формирование прямоугольной области распознавания изображений маркеров на цифровых изображениях камер j-ых прицелов;
вычисление пиксельных координат
 и
и
 геометрических центров изображений по крайней мере трех маркеров;
геометрических центров изображений по крайней мере трех маркеров;
вычисление в соответствии с выражением
векторов
 и
и
 с трехмерными метрическими координатами центров изображений маркеров в СК
с трехмерными метрическими координатами центров изображений маркеров в СК
 камер j-ых прицелов;
камер j-ых прицелов;
решение любым из известных способов системы уравнений
где
 - соответственно, первый, второй и третий столбцы векторов
- соответственно, первый, второй и третий столбцы векторов
 и
и
 , относительно неизвестных координат
, относительно неизвестных координат
 центра изображения первого маркера,
центра изображения первого маркера,
 - второго маркера,
- второго маркера,
 - третьего маркера, выраженных в СК
- третьего маркера, выраженных в СК
 камер j-ых прицелов;
камер j-ых прицелов;
запись матриц

вычисление действующих значений углов
 и
и
 взаимной ориентации осей СК OSXSYSZS относительно осей СК
взаимной ориентации осей СК OSXSYSZS относительно осей СК
 камер j-ых прицелов согласно выражений
камер j-ых прицелов согласно выражений
где

вычисление матрицы
 положений СК
положений СК
 камер j-ых прицелов относительно СК OSXSYSZS площадки с маркерами
камер j-ых прицелов относительно СК OSXSYSZS площадки с маркерами

где
вычисление векторов
 координат точек выверки в СК
координат точек выверки в СК
 камер j-ых прицелов
камер j-ых прицелов

вычисление векторов
 трехмерных координат расчетных положений ЦПМ в СК
трехмерных координат расчетных положений ЦПМ в СК
 камер j-ых прицелов
камер j-ых прицелов

вычисление векторов
 пиксельных координат расчетных положений ЦПМ на изображениях камер j-ых прицелов, в соответствии с выражением
пиксельных координат расчетных положений ЦПМ на изображениях камер j-ых прицелов, в соответствии с выражением
по достижению количества обработанных кадров установленного числа
 , останавливают цикл выверки, а принятые значения
, останавливают цикл выверки, а принятые значения
 усредняют
усредняют

сравнивают значения вектора
 расчетного с вектором
расчетного с вектором
 действующего положения ЦПМ, если они равны, то ЦПМ оставляют без изменений, если значения векторов
действующего положения ЦПМ, если они равны, то ЦПМ оставляют без изменений, если значения векторов
 и
и
 отличаются, то значениям векторов
отличаются, то значениям векторов
 присваивают соответствующие значения векторов
присваивают соответствующие значения векторов
 ;
;
перемещают ЦПМ j-ых выверяемых прицелов на рассчитанные положения согласно значений векторов
 , при чем, если ЦПМ формируются электронным способом, то ЦПМ перемещают также электронным способом, если ЦПМ формируется на изображении прицела в его оптикой части, и изменение положения ЦПМ в поле зрения прицела связано с механическим перемещением одного из оптических элементов, то перемещение ЦПМ должно быть осуществлено механическим способом, например, через сервоприводы, путем воздействия на данный оптический элемент прицела;
, при чем, если ЦПМ формируются электронным способом, то ЦПМ перемещают также электронным способом, если ЦПМ формируется на изображении прицела в его оптикой части, и изменение положения ЦПМ в поле зрения прицела связано с механическим перемещением одного из оптических элементов, то перемещение ЦПМ должно быть осуществлено механическим способом, например, через сервоприводы, путем воздействия на данный оптический элемент прицела;
переводят преломляющие призмы, оптические оси прицелов и вооружение в исходные положения, на чем текущую выверку считают завершенной.
Комментарии