Виндроуэр со множеством жаток - RU2719182C1
Код документа: RU2719182C1
Чертежи

Описание
Область техники, к которой относится изобретение
[1] Предложенное изобретение относится к тракторам или другим рабочим машинам и, в частности, к системе присоединения жаток для использования на тракторе или другой рабочей машине, для присоединения к ней различных жаток.
Уровень техники
[2] Сельскохозяйственная рабочая машина, такая как комбайн или виндроуэр, часто используется для сбора с поля различных сельскохозяйственных культур. Комбайн или виндроуэр часто имеют специальную жатку, присоединяемую к рабочей машине с передней стороны. Жатка специально конструируется под соответствующую сельскохозяйственную культуру, скашиваемую и распределяемую с помощью этой жатки. Одним типом жатки является полотенная жатка, которая имеет ленту, расположенную позади режущего лезвия. По мере скашивания сельскохозяйственной культуры, сельскохозяйственная культура размещается на ленте транспортера для дальнейшего манипулирования и подготовки рабочей машиной.
[3] Несмотря на то, что полотенная жатка широко используется на виндроуэре или комбайне, для многих сельскохозяйственных культур вместо нее требуется ротационная жатка. Ротационная жатка часто имеет режущий брус, по длине которого располагаются несколько вращающихся срезающих элементов. После того, как сельскохозяйственная культура срезана, ротационная жатка манипулирует срезанной сельскохозяйственной культурой, выравнивая ее в нужном месте или обрабатывая с помощью плющилки.
[4] Полотенная жатка и ротационная жатка могут иметь отдельные места установки, расположенные вдоль передней части рабочей машины. Потребности в гидравлической и механической мощности рабочей машины одинаковые для полотенной жатки и ротационной жатки, но для каждого варианта применения часто используется совершенно отдельная рабочая машина.
Раскрытие изобретения
[5] В одном варианте осуществления виндроуэр может содержать раму на переднем конце. Виндроуэр может иметь кабину, соединенную с рамой и множество элементов управления, расположенных в кабине для управления виндроуэром. С рамой может быть соединен подъемный рычаг, который имеет первый конец и второй конец, причем первый конец соединен с рамой шарнирно. Подъемный рычаг может иметь поперечный изгиб, образованный в месте между первым и вторым концами. Со вторым концом подъемного рычага может быть соединено первое соединительное средство, а с подъемным рычагом между первым и вторым концами может быть соединено второе соединительное средство. Первое соединительное средство может быть выполнено с возможностью соединения рамы с жаткой ротационного типа, а второе соединительное средство выполнено с возможностью соединения рамы с полотенной жаткой.
[6] В еще одном варианте осуществления виндроуэр может содержать раму на переднем конце виндроуэра. С рамой может быть соединена кабина, а в кабине для управления виндроуэром может быть расположено множество элементов управления. Кроме того, подъемный рычаг, имеющий первый конец и второй конец, может быть шарнирно прикреплен к раме на первом конце. Подъемный рычаг может содержать поперечный изгиб, образованный в месте между первым и вторым концами. Кроме того, первое соединительное средство может быть соединено со вторым концом подъемного рычага, а второе соединительное средство может быть соединено с подъемным рычагом между первым и вторым концами. На переднем конце к раме также может быть присоединена серьга верхнего звена. Верхнее звено может быть соединено с верхним звеном на первом конце и может иметь второй конец с верхним звеньевым соединительным средством, верхнее звено может иметь первую длину и вторую длину. Кроме того, первое соединительное средство и верхнее звеньевое соединительное средство могут быть выполнены с возможностью присоединения рамы к жатке ротационного типа, когда верхнее звено имеет первую длину, а второе соединительное средство и верхнее звеньевое соединительное средство могут быть выполнены с возможностью присоединения рамы к жатке полотенного типа, когда верхнее звено имеет вторую длину.
[7] В еще одном варианте осуществления система виндроуэра может содержать рабочую машину с кабиной и рамой на переднем конце. Внутри кабины может быть расположена панель управления. Кроме того, узел соединительного рычага может быть прикреплен к раме и иметь соединительное средство для полотенной жатки, а также соединительное средство для ротационной жатки, причем как соединительное средство для полотенной жатки, так и соединительное средство для ротационной жатки имеют положение соединения и положение расцепления. Верхнее звено может быть прикреплено к раме на первом конце и иметь соединительное средство жатки на втором конце, соединительное средство жатки может быть выполнено с возможностью избирательного позиционирования в закрытом или открытом положении. Жатка может избирательно присоединяться к раме соединительным рычагом или верхним звеном.
Кратное описание чертежей
[8] Вышеупомянутые аспекты данного изобретения и способ их получения станут более очевидными, а само изобретение будет более понятным со ссылкой на следующее описание вариантов осуществления изобретения в сочетании с прилагаемыми чертежами, на которых:
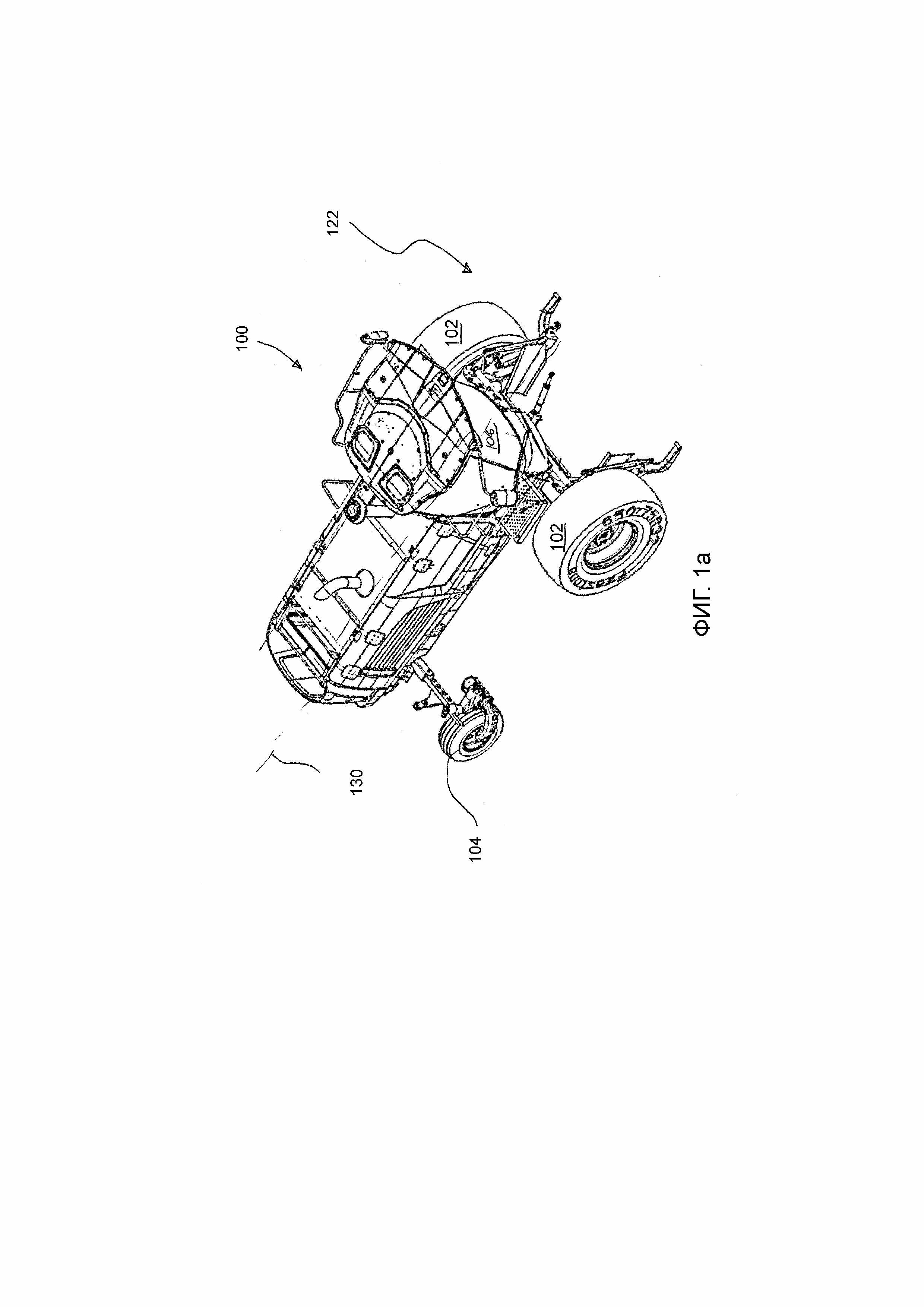
[9] Фиг. 1a представляет собой перспективное изображение сверху рабочей машины без прикрепленной к ней жатки;
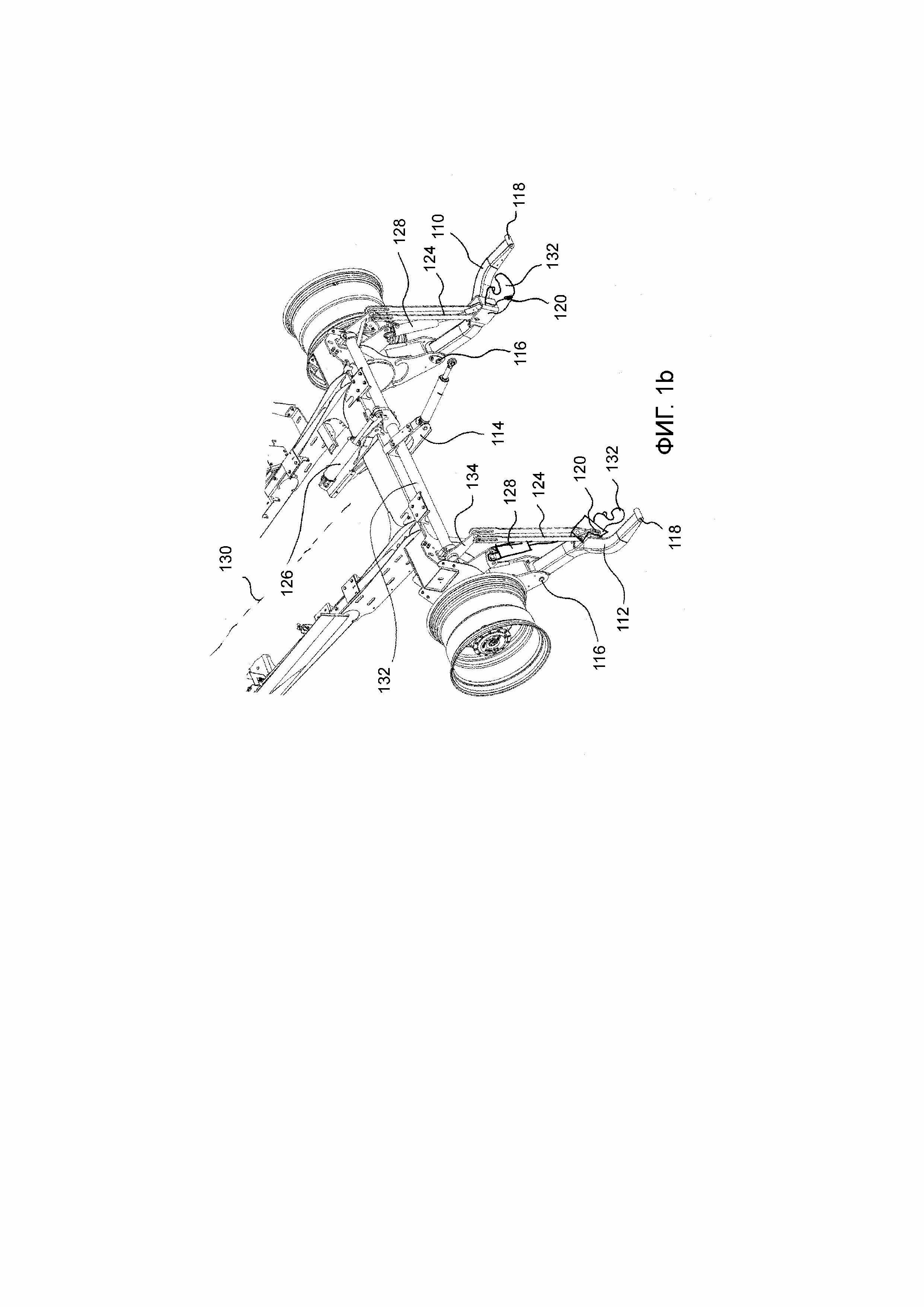
[10] Фиг. 1b представляет собой перспективное изображение сверху рабочей машины с Фиг. 1A c несколькими удаленными компонентами;
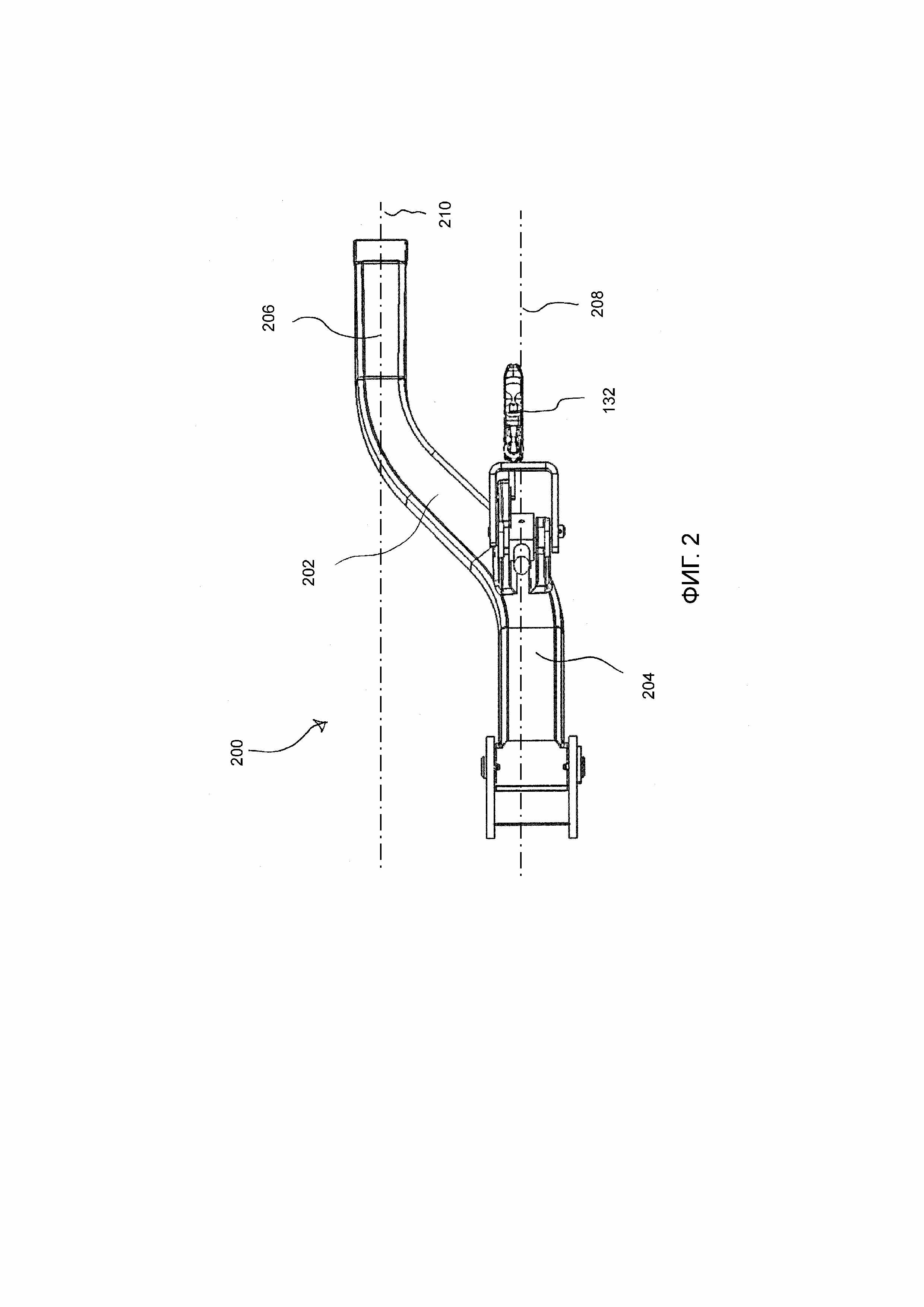
[11] Фиг. 2 представляет собой вид спереди сбоку одного подъемного рычага рабочей машины Фиг. 1а;
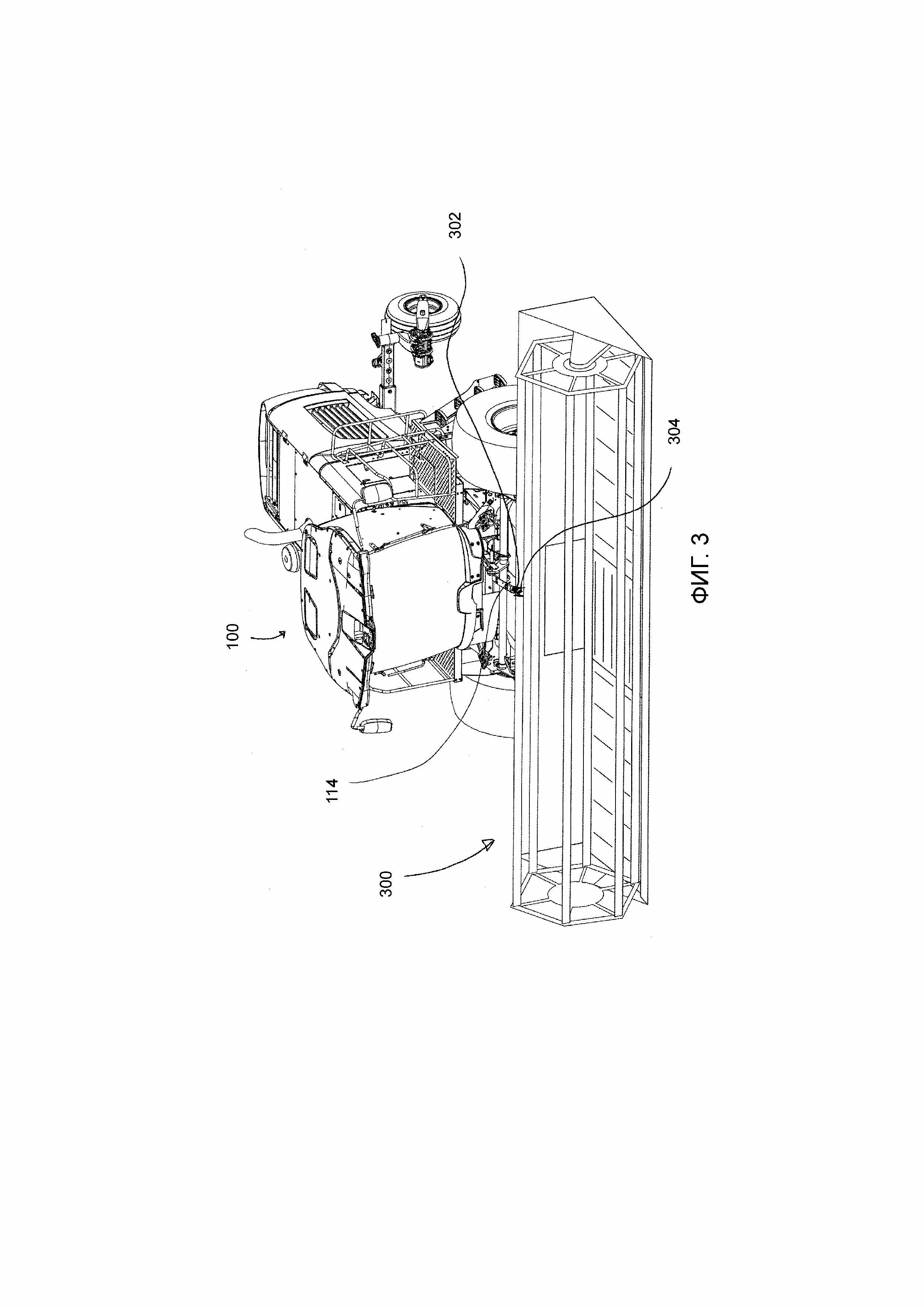
[12] Фиг. 3 представляет собой перспективное изображение сверху рабочей машины Фиг. 1а. с прикрепленной к ней полотенной жаткой;
[13] Фиг. 4 представляет собой частичный вид сбоку рабочей машины Фиг. 3;
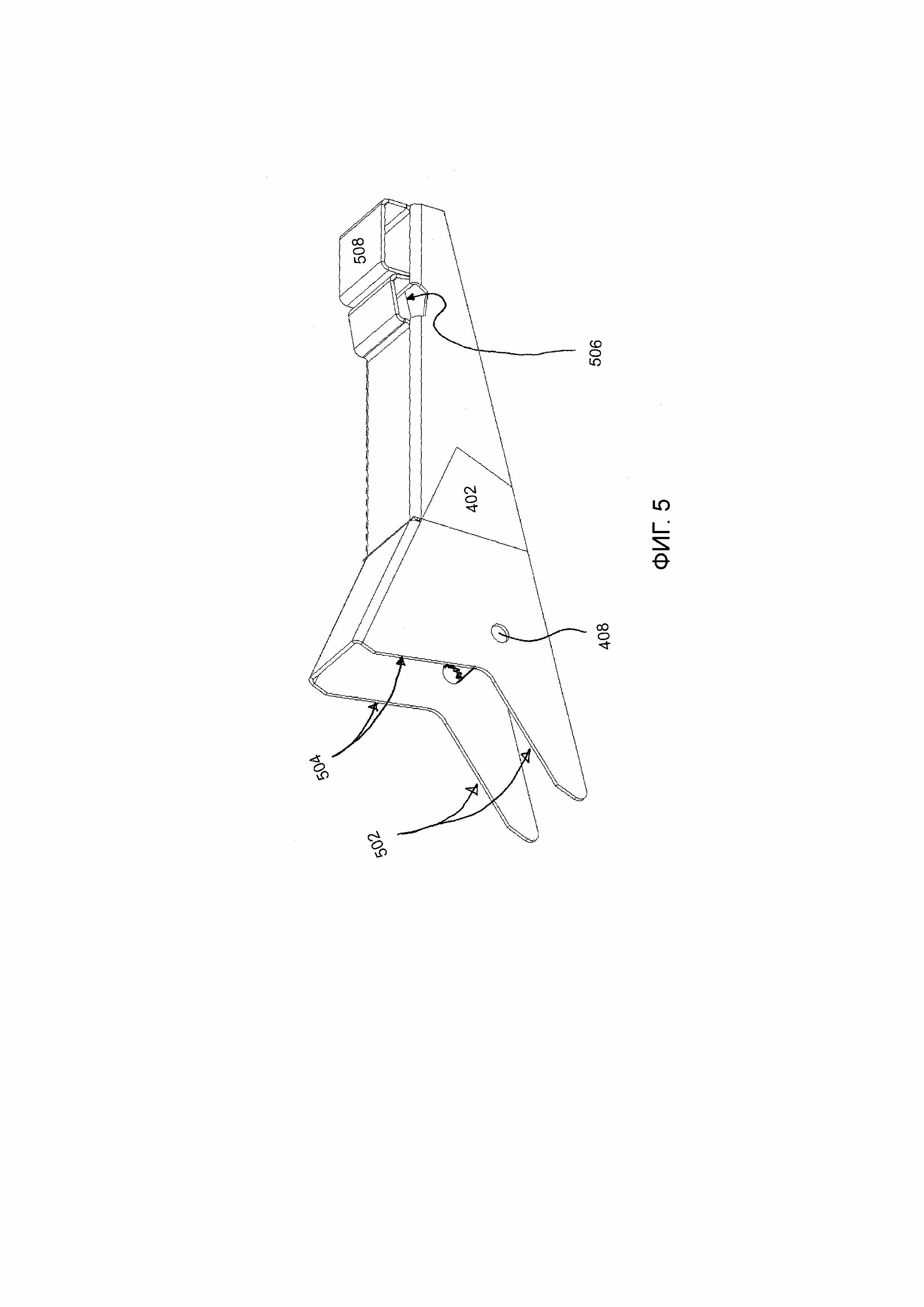
[14] Фиг. 5 представляет собой перспективное изображение сверху промежуточного соединительного средства;
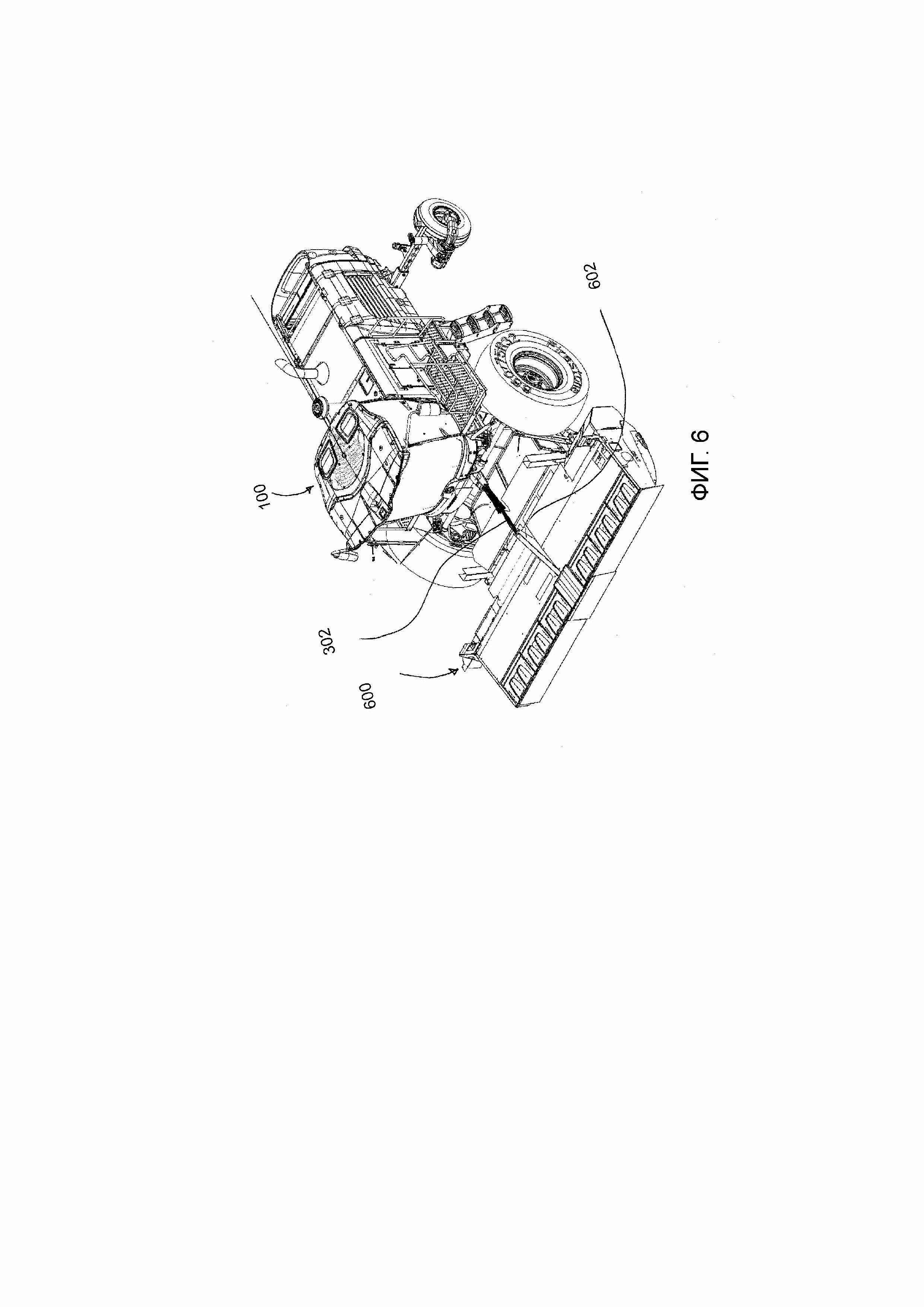
[15] Фиг. 6 представляет собой перспективное изображение сверху рабочей машины с Фиг. 1с прикрепленной к ней ротационной жаткой; а
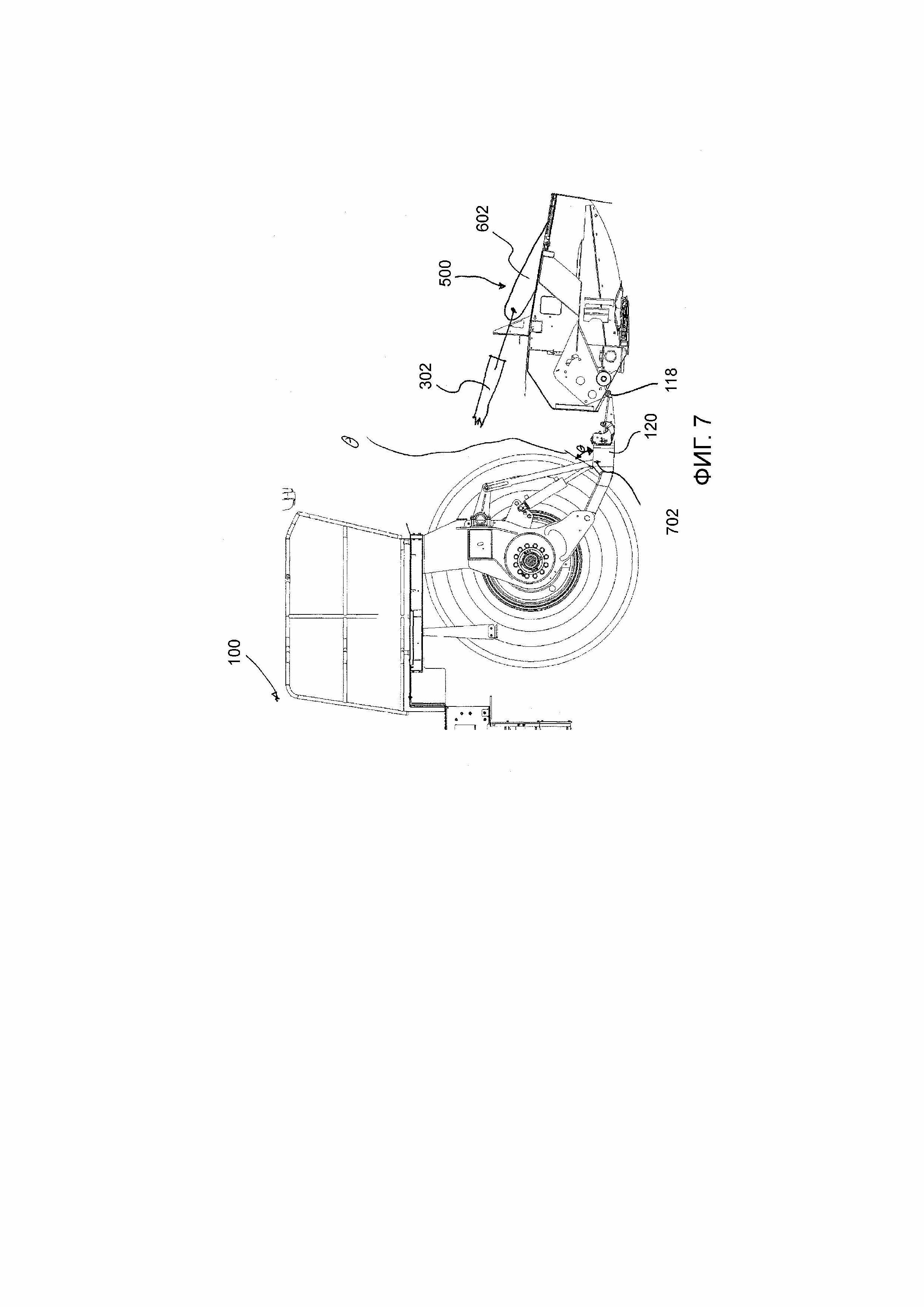
[16] Фиг. 7 представляет собой частичный вид сбоку рабочей машины Фиг. 6.
[17] Соответствующие ссылочные номера использованы для обозначения соответствующих частей на всех рисунках.
Подробное описание изобретения
[18] Варианты осуществления настоящего изобретения, описанного ниже не являются исчерпывающими или ограничивающими изобретение конкретными формами в следующем подробном описании. Скорее, варианты осуществления выбраны и описаны так, чтобы другие специалисты в этой области могли оценить и понять принципы и методы работы предложенного изобретения.
[19] Со ссылкой на Фиг. 1а показано перспективное изображение сверху рабочей машины 100 без прикрепленной к ней жатки. Рабочая машина 100 может иметь по меньшей мере один блок питания, который предоставляет рабочей машине 100 механическую, электрической и/или гидравлическую мощность. В одном варианте осуществления блок питания предоставляет энергию для вращения пары приводных колес 102, прикрепленных к раме 106 рабочей машины 100. Приводные колеса 102 могут вращаться относительно рабочей машины 100, чтобы позволить рабочей машине 100 передвигаться по расположенной внизу поверхности. Рабочая машина 100 может также образовывать ось перемещения 130, расположенную продольно через центральную часть рабочей машины 100. Рабочая машина 100 может оставаться выровненной с осью 130 перемещения при движении по существу в прямом направлении.
[20] В дополнении к ведущим колесам 102 вариант осуществления, показанный на Фиг. 1А, имеет пару поворотных самоустанавливающихся колес 104. Самоустанавливающиеся колеса 104 могут свободно вращаться на креплении, что позволяет рабочей машине 100 вращаться по направлению приводимых в действие ведущих колес 102. Однако, приведенная конфигурация ведущих колес 102 и самоустанавливающихся колес 104 не должна быть ограничением. В другом варианте осуществления колес вообще может не быть. Вместо этого, блок питания может подавать энергию на пару гусениц, что позволяет рабочей машине передвигаться по расположенной внизу поверхности. В еще одном варианте осуществления самоустанавливающиеся колеса 104 могут быть не поворотными самоустанавливающимися колесами, а скорее колесами, соединенными с осью и выполненными с возможностью механического прикрепления к блоку питания.
[21] Рабочая машина 100 также может иметь кабину 108, присоединенную к раме 106. Кабина 108 может вмещать множество элементов управления (не показаны), которые позволяют пользователю управлять различными системами рабочей машины 100. В одном неисключительном варианте осуществления множество элементов управления позволяют пользователю управлять механической, электрической и гидравлической системами рабочей машины 100.
[22] Фиг. 1b более отчетливо иллюстрирует места установки для жатки (жатка не показана на Фиг. 1a или Фиг. 1b). Более конкретно на Фиг. 1b показаны первый подъемный рычаг 110, второй подъемный рычаг 112, верхнюю серьгу 114 и верхнее звено 302. Первый и второй подъемный рычаг 110, 112, вместе с верхней серьгой 114 могут соединяться удовлетворительным образом, чтобы управлять как высотой жатки относительно расположенной внизу поверхности, так и углом жатки относительно рабочей машины 100.
[23] В одном варианте осуществления каждый подъемный рычаг 110, 112 может шарнирно присоединяться к рабочей машине 100 на первом шарнире 116. Первый шарнир 116 может располагаться в проксимальной части каждого подъемного рычага 110, 112 относительно рамы 106. Кроме того, каждый подъемный рычаг 110, 112 может выдвигаться от первого шарнира 116 в направлении переднего конца 122 рабочей машины 100. Каждый подъемный рычаг 110, 112 может иметь первое соединительное средство 118, образованное на дистальном конце соответствующего подъемного рычага 110, 112. Каждый подъемный рычаг 110, 112 может иметь второе соединительное средство 120, соединенное с соответствующим подъемным рычагом 110, 112 в месте между первым шарниром 116 и вторым соединительным средством 120. В одном варианте осуществления второе соединительное средство 120 может иметь присоединенный к ней фиксирующий механизм 132, который может находиться либо в застопоренном положении, либо в расцепленном положении.
[24] Когда жатка присоединена к подъемным рычагам 110, 112, между рамой 106 и первым и вторым подъемными рычагами 110, 112 может быть присоединен по меньшей мере один плавающий цилиндр 128. Более конкретно, соединительный рычаг 124 может быть шарнирно прикреплен к каждому подъемному рычагу 110, 112 на одном конце и к кулачковому поворотному рычагу 132 на другом. Кулачковый поворотный рычаг 134 может быть механически соединен с осью подъемного рычага 132, которую можно поворачивать подъемным цилиндром 126. Когда подъемный цилиндр 126 вращает ось 132 подъемного рычага, поворотный рычаг 134 может вращаться вместе с ним и тянуть соответственный подъемный рычаг 110, 112, с соответствующим соединительным рычагом 124.
[25] В одном варианте осуществления подъемный цилиндр 126 поворачивает подъемные рычаги 110, 112 между поднятым и опущенным положением. Подъемный цилиндр 126 может также позволять регулировать высоту жатки, когда жатка находится в опущенном положении. В этом варианте осуществления подъемный цилиндр 126 может регулировать высоту жатки относительно расположенной внизу поверхности, в то время как плавающие цилиндры 128 могут быть соединены с каждым подъемным рычагом 110, 112 для того, чтобы уменьшить силу контакта, возникающую во время контакта жатки с расположенной внизу поверхностью. Более конкретно, плавающие цилиндры 128 могут обеспечивать подъемным рычагам 110, 112 смещающее усилие в сторону от расположенной внизу поверхности. Когда подъемные рычаги 110, 112 присоединены к жатке, подъемный цилиндр 126 может располагать жатку на желаемой высоте от расположенной внизу поверхности. Плавающие цилиндры 128 могут обеспечивать подъемным рычагам 110, 112 смещающееся усилие, так что жатка может легко подниматься относительно расположенной внизу поверхности, если она наткнулась на препятствие. Кроме того, плавающие цилиндры 128 могут позволять пользователю регулировать смещающуюся силу жатки относительно расположенной внизу поверхности, уменьшая или увеличивая способность вынести нагрузку соответствующих подъемных рычагов 110, 112.
[26] В одном варианте осуществления соединительный рычаг 124 может быть шарнирно соединен с кулачковым поворотным рычагом 134 с помощью штифта, расположенного в пазу соединительного рычага 124. Механизм зацепления с прорезями позволяет подъемному цилиндру 126 переводить подъемные рычаги 110, 112 в опущенное положение (когда штифт находится в самой верхней части паза) и позволяет плавающим цилиндрам 128 обеспечивать жатке смещающее усилие, чтобы позволить жатке передвигаться в сторону от расположенной внизу поверхности, если она столкнется с препятствием.
Более конкретно, когда штифт находится в самой верхней части паза, а жатка контактирует с препятствием на расположенной внизу поверхности, плавающие цилиндры 128 могут обеспечивать смещающееся усилие, чтобы помочь поднять жатку над расположенной внизу поверхностью. Далее, когда жатка поднята над расположенной внизу поверхностью, штифт может переходить к нижней части паза. После того как препятствие было полностью пройдено, штифт может возвратиться к верней части паза, а высота жатки может сохраняться цилиндром 126.
[27] Фиг. 2 представляет собой вид сверху подъемного рычага 112. Более конкретно на Фиг. 2 показан поперечный изгиб 202, образованный в подъемном рычаге 112, когда он выдвигается от рамы 106. Далее, подъемный рычаг 112 может иметь первую часть 204 и вторую часть 206, смещенные одна от другой и соединенные через поперечный изгиб 202. В одном варианте осуществления первая часть 204 может быть по существу выровнена с первой осью 208, а вторая часть 206 может быть по существу выровнена со второй осью 210. В одном варианте осуществления первая и вторая оси 208, 210 могут быть по существу параллельны друг другу, а поперечный изгиб 202 может переходить от первой оси 208 ко второй оси 210, чтобы соединять первую часть 204 со второй частью 206.
[28] В одном варианте осуществления первая часть 204, поперечный изгиб 202 и вторая часть 206 могут быть изготовлены в виде единого целого из одного материала. В другом варианте осуществления, каждая из первой части 204, поперечного изгиба 202 и второй части 206 могут быть сформированы из другого сегмента материала и соединены друг с другом различными соединительными механизмами, такими как сварные швы, болты, заклепки и т.п. Кроме того, несмотря на то, что один вариант осуществления был описан с наличием первой части 204, по существу параллельной второй части 206, в другом варианте осуществления первая часть 204 может иметь угловое смещение относительно второй части 206.
[29] В одном варианте осуществления первая ось 208 может быть расположена ближе к оси 130 движения, чем вторая ось 210. То есть, поперечный изгиб 202 отходит от оси 130 движения, так как он соединяет первую часть 204 со второй частью 206. В одном неограничивающем варианте осуществления первое соединительное средство 118 располагается вдоль второй оси 210, в то время как второе соединительное средство 120 располагается вдоль первой оси 208.
[30] Далее со ссылкой на Фиг. 3 показана рабочая машина 100 с полотенной жаткой 300. Полотенная жатка 300 может быть соединена с рабочей машиной 100 с помощью второго соединительного средства 120, соответствующего первого и второго подъемного рычага 110, 112. Кроме того, полотенная жатка также может присоединяться к верхней серьге 114 с помощью верхнего звена 302. В одном варианте осуществления верхнее звено 302 может быть гидравлическим цилиндром, который может выборочно приводиться в действие пользователем посредством множества элементов управления. Верхнее звено 302 может крепиться шарнирно к верхней серьге 114 на базовом конце и шарнирно крепиться к креплению жатки (не показано) на конце жатки.
[31] В одном варианте осуществления пользователь может выборочно приводить в действие верхнее звено 302, чтобы изменить общую длину верхнего звена 302. В этом варианте осуществления, если верхнее звено 302, приводимое в действие пользователем, становится длиннее, полотенная жатка 300 может вращаться в направлении вниз относительно рабочей машины 100. Более конкретно, по мере того как верхнее звено 302 выдвигается, часть полотенной жатки 300 в направлении переднего конца 122 поворачивается по направлению к расположенной внизу поверхности. И наоборот, если пользователь укорачивает верхнее звено 302, полотенная жатка 300 может поворачиваться вверх относительно рабочей машины 100. Более конкретно, по мере того как верхнее звено 302 сокращается, часть полотенной жатки 300 в направлении переднего конца 122 поворачивается в сторону от расположенной внизу поверхности.
[32] Как станет более понятно со ссылкой на Фиг. 4, полотенная жатка 200 может быть соединен с фиксирующим механизмом 132 с помощью одного или нескольких промежуточных соединительных средств 402. Промежуточные соединительные средства 402 могут быть соединены с полотенной жаткой 300 через раму 404 полотенной жатки и располагаться выровненно с первым и вторым подъемным рычагом 110, 112. Промежуточное соединительное средство 402 может иметь по существу U-образное поперечное сечение, которое может принимать часть фиксирующего механизма 132 при присоединении к рабочей машине 100. Рама 404 полотенной жатки может быть также прикреплена к промежуточному соединительному средству 402 нижним штифтом 406. В одном варианте осуществления нижний штифт 406 позволяет полотенной жатке вращаться вокруг нижнего штифта 406 по мере изменения длины верхнего звена 302, как подробно было объяснено выше. Несмотря на то, что было подробно описано промежуточное соединительное средство 402, также может действовать любой соединительный механизм. В одном варианте осуществления промежуточным соединительным средством 402 может быть башмак или любое другое подобное промежуточное соединительное средство.
[33] Промежуточное соединительное средство 402 может также иметь расположенной на нем фиксирующий штифт 408. Фиксирующий штифт 408 может проходить через часть U-образного промежуточного соединительного средства 402, чтобы обеспечить расположение фиксирующего механизма 132 для соединения с возможностью снятия с промежуточным соединительным средством 402. Когда фиксирующий механизм 132 соединен с промежуточным соединительным средством 402, он может хотя бы частично располагаться внутри внутренней области U-образного поперечного сечения промежуточного соединительного средства 402. Когда фиксирующий механизм 132 находится в застопоренном положении, промежуточное соединительное средство 402 может быть механически соединено с соответствующим подъемным рычагом 110, 112 посредством фиксирующего штифта 408. И наоборот, когда фиксирующий механизм 132 находится в не зафиксированном положении, соответствующий подъемный рычаг 110, 112 не может быть механически прикреплен к промежуточному соединительному средству 402.
[34] Промежуточное соединительное средство более детально показано на Фиг. 5. В одном варианте осуществления промежуточное соединительное средство 402 имеет направляющую поверхность 502, образованную в части промежуточного соединительного средства 402, которая простирается от рамы 404 полотенной жатки при присоединении к ней. Направляющая поверхность 502 может направлять фиксирующий механизм 132 к фиксирующему штифту 408, когда соответствующий подъемный рычаг 110, 112 становиться выровненным с промежуточным соединительным средством 402.
[35] В дополнении к направляющей поверхности 502 промежуточное соединительное средство 402 может также иметь образованную в нем упорную поверхность 504. Упорная поверхность 504 может быть образована в промежуточном соединительном средстве 402, чтобы соединяться со вторым соединительным средством 120, когда фиксирующий механизм 132 соединен с фиксирующим штифтом 408. Направляющая поверхность 502 и упорная поверхность 504 могут по существу ограничивать вращение промежуточного соединительного средства 402 или какие-то другие движения относительно соответствующего подъемного рычага 110, 112, когда фиксирующий механизм 132 соединен с фиксирующим штифтом 408.
[36] Как было отмечено выше, полотенная жатка 300 может вращаться вокруг нижнего штифта 406, когда полотенная жатка соединена с рабочей машиной 100. Рама 404 может быть шарнирно соединена с каждым соответствующим промежуточным соединительным средством 402 нижним штифтом 406. Кроме того, нижний штифт 406 расположен в отверстии 506 штифта, образованном на промежуточном соединительном средстве 402. Отверстие 506 штифта может иметь такой размер, чтобы нижний штифт 406 мог шарнирно крепить раму 404 к промежуточному соединительному средству 402. В одном неограниченном примере, когда рама 404 соединена с промежуточным соединительным средством 402 за счет расположения нижнего штифта 406 через отверстие 506 штифта, а промежуточное соединительное средство 402 соединено с фиксирующим механизмом 132, полотенная жатка 300 может вращаться вокруг нижнего штифта 406 и изменять угловое расположение относительно подъемных рычагов 110, 112, когда длина верхнего звена 302 изменяется пользователем.
[37] Промежуточное соединительное средство 402 может также иметь образованную в нем упорную поверхность 508. Упорная поверхность 508 может иметь соединенный с ней резиновый или другой материал, приспособленный к упругим деформациям. Упорная поверхность 508 может существенно смягчать любые воздействия, например вибрации, между рамой 404 и промежуточным соединительным средством 402. В дополнение к тому, что материал обладает упругими свойствами, механическая пружина или амортизатор может также использоваться на упорной поверхности 508 для смягчения движения рамы 404 относительно промежуточного соединительного средства 402, и данное изобретение не должно быть ограничено конкретным материалом или узлом.
[38] Со ссылкой на Фиг. 6 изображена рабочая машина 100 с ротационной жаткой 600. Ротационная жатка 600 может быть присоединена к рабочей машине 100 через подъемные рычаги 110, 112 и верхнее звено 302. Однако, ротационная жатка 600 может быть соединена с подъемными рычагами 110, 112 на соответствующем первом соединительном средстве 118, вместо соединения с соответствующим вторым соединительным средством 120, как полотенная жатка 300.
[39] На Фиг. 6 более понятно показано, как ротационная жатка 600 присоединяется к рабочей машине 100. Более конкретно, верхнее звено 302 может шарнирно присоединять верхнюю серьгу 114 к вращающемуся кронштейну 602. Верхнее звено 302 может управлять угловой ориентацией ротационной жатки 600 относительно расположенной внизу поверхности аналогичным образом, как было уже было описано более подробно выше для полотенной жатки 300. Соответственно, признаки, описанные выше для верхнего звена 302 одинаково применимы тут, и считаются включенными в настоящее описание для ротационной жатки 600.
[40] Далее со ссылкой на Фиг. 7 показано первое соединительное средство 118, шарнирно присоединенное к ротационной жатке 600. В одном варианте осуществления первое соединительное средство 118 можно присоединять к ротационной жатке 600 без контакта со вторым соединительным средством 120. В другом варианте осуществления второе соединительное средство 120 может поворачиваться, чтобы располагаться в различных положениях (не показано) вдоль соответствующего подъемного рычага 110, 112, чтобы обеспечивать достаточный зазор ротационной жатке 600. Более того, в одном варианте осуществления первое соединительное средство 118 может крепиться к ротационной жатке 600 дистанционно из кабины 108 с помощью электрических, гидравлических или пневматических систем.
[41] В том варианте осуществления, когда расположение второго соединительного средства 120 изменяется, чтобы создать надлежащий зазор ротационной жатке, второе соединительное средство 120 может быть шарнирно соединено с соответствующим подъемный рычагом 110, 112 с помощью штифта 702 соединительного средства. Штифт 702 соединительного средства может располагаться в непосредственной близости к краю второго соединительного средства 120 и дополнительно соединяться с частью соответствующего подъемного рычага 110, 112. Штифт 702 соединительного средства может шарнирно крепить второе соединительное средство 120 к соответствующему подъемному рычагу 110, 112 так, чтобы позволять второму соединительному средству 120 вращаться из рабочего положения 704 в убранное положение (не показано). Второе соединительное средство 120 может поворачиваться вокруг штифта 702 на угол Θ относительно соответствующего подъемного рычага 110, 112, чтобы становиться в убранное положение. В этом варианте осуществления, прежде чем ротационная жатка соединяется с первым соединительным средством 118, второе соединительное средство 120 поворачивают на угол Θ в убранное положение, чтобы обеспечить ротационной жатке 600 необходимый зазор. Когда второе соединительное средство 120 повернуто на угол Θ, второе соединительное средство 120 и ротационная жатка 600 не могут касаться друг друга, когда ротационная жатка 600 соединена с подъемными рычагами 110, 112.
[42] В одном варианте осуществления механизмы дистанционного соединения (не показаны) могут быть расположены на каждом первом соединительном средстве 118, втором соединительном средстве 120 и верхнем звене 302. В этом варианте осуществления пользователь может использовать множество элементов управления для приведения каждого из дистанционных соединяющих механизмов в соединенное или разъединенное положение. Когда дистанционные соединяющие механизмы находятся в разъединенным положении, пользователь может ориентировать рабочую машину 100 для выравнивания ее в соответствии с требуемой жаткой 300, 600.
[43] В одном примере пользователь может расположить верхнее звено 302 таким образом, чтобы получилась нужная длина для присоединения к полотенной жатке 300. Затем пользователь может выровнять рабочую машину 100 с полотенной жаткой 300, когда дистанционные соединяющие механизмы второго соединительного средства 120 и верхнее соединительное звено 302 находятся в разъединенном положении. Когда фиксирующий механизм 132 правильно выровнен с фиксирующим штифтом 408 промежуточного соединительного средства 402, и верхнее звено 302 правильно выровнено с креплением жатки, пользователь может переводить дистанционные механизмы соединения в положение соединения, таким образом механически присоединяя полотенную жатка 300 к рабочей машине 100.
[44] Таким же образом, когда полотенная жатка 300 соединена с рабочей машиной 100, при подготовке к отсоединению полотенной жатки 300 пользователь может расположить полотенную жатку на носителе (не показан) или на расположенной внизу поверхности. После того как полотенная жатка 300 поддерживается носителем или расположенной внизу поверхностью, пользователь может использовать множество элементов управления для перевода дистанционных соединительных механизмов вторых соединительных средств 120 и верхнего звена 302 в положение отсоединения, тем самым механически отсоединяя полотенную жатку от рабочей машины 100.
[45] В другом примере при использовании такой же рабочей машины 100 пользователь может располагать верхнее звено 302 на длину, которая соответствует ротационной жатке 600. Пользователь может затем выровнять рабочую машину 100 с ротационной жаткой 600, когда дистанционные соединительные механизмы первого соединительного средства 118 и верхнее звено 302 находятся в положении отсоединения. Когда первое соединительное средство 118 достаточно выровнено с ротационной жаткой 600, а верхнее звено 302 выровнено с вращающимся кронштейном 602, пользователь может переводить дистанционные соединительные механизмы в положение соединения, тем самым механически присоединяя ротационную жатку 600 к рабочей машине 100.
[46] Таким же образом, когда ротационная жатка 600 соединена с рабочей машиной 100, пользователь может расположить ротационную жатку 600 на носителе (не показан) или расположенной внизу поверхности для подготовки к съему ротационной жатки 600. После того как ротационная жатка 600 поддерживается носителем или расположенной внизу поверхностью, пользователь может с помощью множества элементов управления перевести дистанционные механизмы соединения первого соединительного средства 118 и второго звена 302 в расцепленное положение, тем самым механически отсоединяя ротационную жатку 600 от рабочей машины 100.
[47] Дистанционные соединительные механизмы могут быть любыми из множества устройств. В одном варианте осуществления дистанционными соединительными устройствами являются гидравлически управляемые фиксаторы, которые можно переключать в соединенное и расцепленное положение с помощью гидравлической жидкости. В другом примере дистанционными соединительными устройствами управляют электрически с помощью электромагнитов, моторов или других подобных электрических средств, которые переключают дистанционные соединительные устройства в соединенное и расцепленное положения с помощью электрических сигналов. Как известно в данном разделе техники, в еще одном варианте осуществления для переключения дистанционных соединительных устройств между соединенным и расцепленным положениями может использоваться пневматическое давление.
[48] В другом варианте осуществления каждое из дистанционных соединительных устройств может переключаться между соединенным и расцепленным положениями механически. В этом варианте осуществления перед выравниванием рабочей машины 100 с требуемой жаткой 300, 600 пользователь вначале может расположить дистанционные соединительные механизмы в расцепленном положении. После того как соединительные механизмы правильно выровнены, пользователь должен механически переключить каждый из дистанционных соединительных механизмов в положение соединения. Точно также, чтобы снять насадку 300, 60, пользователь должен переключить дистанционные соединительные механизмы в расцепленное положение и переместить рабочую машину 100 от жатки 300, 600.
[49] В дополнение к управлению дистанционными соединительными механизмами, множество элементов управления могут еще контролировать угловую ориентацию второго соединительного средства 120. В качестве одного неограниченного примера, оператор может указать с помощью множества элементов управления, что рабочую машину 100 собираются соединять с ротационной жаткой 600. После того, как пользователь дает сигнал о планирующемся отсоединении, второе соединительное средство 120 передвигается на Θ градусов относительно соответствующих подъемных рычагов 110, 112, чтобы обеспечить достаточный зазор для ротационной жатки 600 для присоединения к подъемным рычагам 110, 112. Множество электрических, гидравлических и/или пневматических систем могут быть использованы для перемещения второго соединительного средства 120 на Θ градусов относительно соответствующего подъемного рычага 110, 112, и это изобретение не должно быть ограничено какой-нибудь одной системой. Скорее, специалист в данной области, понимает, как каждую из этих систем можно использовать, чтобы повернуть второе соединительное средство 120.
[50] Несмотря на то, что в этой заявке показаны и описаны полотенная жатка 300 и ротационная жатка 600, данное изобретение не ограничено этими определенными жатками. Жатки типа полотенной жатки или ротационной жатки являются только парой из множества возможных типов жаток, которые можно прикрепить к рабочей машине 100. Соответственно, данное изобретение не должно быть ограничено каким-либо конкретным видом жатки.
[51] Несмотря на то, что в данной заявке описаны варианты осуществления, использующие принципы данного изобретения, настоящее изобретение не ограничено описанными вариантами осуществления. Напротив, данная заявка охватывает любые вариантов, способы применения или средства изобретения, использующие его общие принципы. Кроме того, данная заявка охватывает такие отклонения от предложенного изобретения, которые попадают в рамки известного или общепринятого практического применения в области техники, к которой относится это изобретение, и которые попадают в пределы ограничений прилагаемой формулы изобретения.
Реферат
Изобретение относится к области сельского хозяйства и может быть использовано для уборки сельскохозяйственных культур. Виндроуэр содержит раму на переднем конце виндроуэра и кабину, соединенную с рамой. Кабина имеет множество средств управления в кабине для управления виндроуэром. Виндроуэр также имеет подъемный рычаг с первым концом и вторым концом, при этом его первый конец шарнирно соединен с рамой. Подъемный рычаг имеет поперечный изгиб, образованный в месте между первым и вторым концами. Со вторым концом подъемного рычага соединено первое соединительное средство, а с подъемным рычагом между первым и вторым его концами соединено второе соединительное средство. Первое соединительное средство выполнено с возможностью соединения рамы с жаткой ротационного типа, а второе соединительное средство выполнено с возможностью соединения рамы с жаткой полотенного типа. Изобретение позволит упростить процесс замены одной жатки на другую. 3 н. и 17 з.п. ф-лы, 7 ил.
Формула
Документы, цитированные в отчёте о поиске
Сельскохозяйственный виндроуэр (варианты) и жатка для уборки зерновых
Комментарии