Система пуска ракет и вспомогательная аппаратура - RU2551047C2
Код документа: RU2551047C2
Чертежи






































Описание
Перекрестные ссылки на родственные заявки
Эта заявка заявляет преимущество приоритета промежуточной патентной заявки США №61/337,645, поданной 11 февраля 2010 года, согласно статье 119(е) главы 35 Кодекса законов США, которая полностью включена в настоящее описания изобретения посредством ссылки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Область техники
Настоящее изобретение касается системы доставки различных видов полезной нагрузки в верхние слои атмосферы и выше, в частности ракетной установки с высокой циклической скоростью запуска с верхней пусковой станцией. Собственный вес тросов компенсируется аэростатами. Тросы натягиваются одним или несколькими аэростатами и крепятся шарнирным привязным тросом.
Уровень техники
Существуют или были предложены в недавних публикациях многие методы доставки полезных материалов, таких как топливо, газы для жизнеобеспечения и т.п. и изделий в верхние слои атмосферы и выше.
Сюда в первую очередь относятся ракеты, работающие от химических, ядерных или наземных лазерных или мазерных источников энергии. Существуют или были предложены различные способы снижения стоимости за единицу массы доставки полезных материалов и изделий в верхние слои атмосферы и выше, которые включают ракеты.
Сюда относились летательные аппараты с ракетными двигателями многоразового использования, такие как американский "Космический челнок", который вскоре должен быть выведен из эксплуатации, или теперь неэксплуатируемый российский "Буран". На сегодняшний день известно о том, что эксплуатируются только химические многоступенчатые ракеты или летательные аппараты с подвесными ракетными ускорителями на твердом топливе или ракетами, такими как крошечный американский Пегас, который транспортируется на большую высоту перед пуском.
Предложенные способы снижения стоимости доставки в верхние слои атмосферы или выше чаще всего включают передачу энергии ракетам путем увеличения либо их кинетической, либо потенциальной энергии перед зажиганием основного двигателя или двигателей. К предложениям, при помощи которых это может быть достигнуто, относятся следующие: поднятие путем подвешивания под одноразовым, свободно летящим аэростатом или принудительный выброс на большой скорости с больших пушек, в которых используется химическое топливо или сжатый воздух либо сжатый водород, или транспортировка на большую высоту путем прикрепления к самолетам, таким как реактивный самолет White Knight Two компании Virgin Galactic, или транспортировка на большую высоту путем буксировки на привязном тросе за самолетом, или ускорение до большой скорости при помощи наземных салазок при помощи линейных индукционных двигателей, реактивных двигателей или ракет, перед зажиганием основного двигателя или двигателей ракеты.
Один предложенный способ снижения стоимости доставки, в котором не применяются ракеты, - это так называемый "космический лифт", в котором большая масса привязывается к земле при помощи одного троса длиной много тысяч миль. Большая масса двигается по геосинхронной орбите земли и поддерживает трос туго натянутым. Этот трос затем будет использоваться аналогично железнодорожной колее, по которой движутся поезда.
Основной сложностью последнего метода является то, что предел прочности при растяжении материала, который требуется для троса, значительно превышает характеристики любого существующего материала, особенно с учетом того, что собственный вес троса будет значительным. Еще одна сложность состоит в том, чтобы передать транспортному средству, взбирающемуся по этому тросу, достаточную энергию, чтобы уйти из гравитационного поля Земли. Невесомый, суперпрочный материал троса был бы идеальным для такого "космического лифта", но он пока не существует. Проблема передачи энергии на высоту троса длиной в тысячи миль навела на мысль об использовании фокусированных микроволн или лазерной энергии для питания взбирающегося транспортного средства. Дефокусирующее и преграждающее влияние облаков и атмосферы на фокусированную энергию с большой вероятностью сильно снизит количество энергии, которая фактически достигнет взбирающегося транспортного средства. Рассеивание энергии при возвращении (взбирающегося) транспортного средства на землю с большой вероятностью будет совершенно расточительным из-за необходимости торможения, чтобы избежать превышения предельных возможностей скорости механизма, удерживающего указанное транспортное средство на тросе.
Многие из предложенных в настоящее время способов требуют разработки новых материалов или массивных конструкций, и маловероятно, что они в ближайшие десятилетия дойдут до коммерческой эксплуатации, если вообще это случится.
Большинство теперешних способов пуска предусматривают использование большого количества энергии, получаемой, в первую очередь, из ископаемого топлива, такого как уголь или нефть, для производства криогенного окислителя жидкого кислорода, криогенного жидкого водорода или других видов жидкого углеводородного топлива или твердого топлива. Это использование невозобновляемых источников по своей сути недостаточно, потому что на этом этапе производства топлива нарастают технологические неэффективности. Кроме того, большая масса и иногда токсичный характер выхлопного материала, используемого для перемещения транспортного средства за пределы атмосферы, часто оказывает негативное воздействие на экологию или может нарушить климатическое равновесие.
Соответственно, существует потребность в способе доставки полезных материалов, таких как топливо, газы для жизнеобеспечения и т.п. и изделий в верхние слои атмосферы и выше, по такой цене за единицу доставляемой массы, которая значительно ниже имеющихся на данный момент на рынке, в котором используются доступные на данный момент материалы и технологии. Более того, будет полезно для экологии минимизировать массу материала, используемого для выведения транспортного средства за пределы земной атмосферы путем использования гидроэлектрической, геотермальной или солнечной энергии от фотоэлектрических батарей для подъема транспортного средства как можно выше, прежде чем зажигать двигатель или двигатели транспортного средства.
Атмосферный контроль осуществляется более пятидесяти лет. Измерение солнечного излучения, концентраций газовых примесей, температуры, давления и прочих параметров, по которым можно предсказать направление земных климатологических изменений, существенно улучшили наше понимание мирового климата. Это особенно важно в отношении озоновой дыры, постоянного роста содержания углекислого газа и прочих "парниковых" газов в атмосфере, а теперь более пятидесяти химических соединений в земной атмосфере.
Поскольку наблюдается рост уровней "парниковых" газов и газов, уменьшающих озоновый слой, таких как углекислый газ, хлорфторуглеводороды, закись азота и гексафторид серы, которые приводят к глобальному потеплению и другим изменением глобальной погоды, возрастают требования к более постоянному атмосферному контролю. К текущим методам контроля атмосферных условий относятся оснащенные большим количеством оборудования пилотируемые и непилотируемые самолеты, неуправляемые газовые шары с подвесным блоком приборов; ракеты с образцами и измерительными приборами, а также наземные лазерные и радарные станции.
За исключением наземных станций они могут обеспечить только относительно короткий период отбора образцов атмосферных данных. Самый продолжительный контроль неназемными способами не превышает нескольких дней в случае газовых шаров, а самый короткий, такой как ракеты, обеспечивает измерение в течение нескольких минут. Во многих из этих способов атмосферного контроля также используются одноразовые блоки приборов, тогда как существующие наземные станции не могут получить физических образцов для определения химического состава, содержания бактерий/микроорганизмов, анализа интенсивности и спектра солнечного света и других данных по всей глубине атмосферы.
Поэтому существует потребность в конструкциях, идущих от поверхности земли на большую высоту, на которые может устанавливаться измерительное оборудование для постоянного контроля и. взятия образцов атмосферы, падающего солнечного и прочего излучения.
Из соображений безопасности многие страны по всему миру все более широко используют радиосвязь и загоризонтные радары.
Недавняя мировая обеспокоенность по поводу безопасности на фоне неожиданных террористических атак, вынудили страны, такие как Соединенные Штаты Америки, усилить уровень контроля за использованием радарных и прочих средств обнаружения с использованием различных областей электромагнитного спектра. Это подтверждается Законом конгресса "О Комиссии 9/11", 2007 года, частично касающегося системы радиосвязи для безопасности Соединенных Штатов. Область действия наземных радаров ограничена кривизной поверхности Земли, а для достижения большего полезного радиуса действия радары и прочие системы устанавливают на высоколетящие летающие аппараты или привязанные тросами газовые шары на низкой высоте.
Аналогичным образом операторы мобильной связи сейчас пытаются увеличить область, обслуживаемую высоко летящими летательными аппаратами с приемниками и передатчиками, которые планируется запустить по замкнутому кругу вокруг обслуживаемой зоны. Примерами таких систем на чрезвычайно большой высоте являются спутниковые телефонные системы INMARSAT и IRIDIUM, в которых используются чрезвычайно дорогие и не подлежащие ремонту геостационарные спутники для связи.
Таким образом, как следует из вышеизложенного, существует потребность в дешевых, расположенных на большой высоте платформах для радиосвязи и радаров.
Настоящее изобретение также касается туризма. Посещение высоких сооружений, таких как Эйфелева башня, высоких зданий, таких как Эмпайрстейт-билдинг или высоких природных объектов, таких как гора Эверест, продолжает оставаться обычным видом деятельности туристов. Действительно, в последнее время наблюдается повышенный невоенный интерес к дорогим полетам на самолете на больших высотах. Недавний приз "X Prize" за безопасный полет на высоту 100 и более километров, выигранный аппаратом Space Ship One Берта Рутана, дополнительно подталкивает коммерциализацию транспортировки ни большую высоту. Проблема с аппаратами Space Ship One и Space Ship Two состоит в том, что в их ракетных двигателях используется окислитель сжиженной закиси азота и твердое топливо на основе полибутадиена с концевыми гидроксильными группами, выхлоп которого производит сажу, частично сгоревшую резину и прочие вредные материалы. В недавних публикациях было заявлено о разработке альтернативных видов топлива для аппарата Space Ship Two - асфальта и парафина. Существует высокая вероятность, что хотя это и дешевое ископаемое топливо, сгорание будет неполным. Велика вероятность выработки загрязняющих продуктов выброса в случае асфальта, оксидов металла и соединений кислой серы. Влияние только сажи, которое недавно было рассчитано для 1000 пусков в год Мартином Россом для Aerospace Corporation, говорит о нарушении стратосферы и стремительном росте температур на полюсах Земли. Опубликованная частота пусков означает всего несколько раз в неделю.
Потому наблюдается рост рынка более дешевой и более частой транспортировки туристов на еще большие высоты.
За последние несколько лет затяжные прыжки с парашютом как спорт изменились и теперь включают крылья-парашюты, действующие по принципу набегающего потока воздуха, использование вспомогательного оборудования, такого как небольшие жесткие крылья, миниатюрные доски для серфинга, ракеты и даже миниатюрные турбореактивные двигатели. К тому же, увеличилась высота, с которой спрыгивают парашютисты, хотя она ограничивается двумя основными факторами. У гражданских воздушных судов с крыльями и вертолетов существуют ограниченные возможности работы на больших высотах, на которых предусмотрен получасовой лимит для гражданской авиации для обогащенных кислородом систем суфлирования или требование наличия герметичного скафандра или кабины. Вскоре ожидается, что для энтузиастов затяжных прыжков с парашютом станут доступны гражданские герметичные скафандры с учетом развития высотного парашютизма.
Сейчас рассматриваются даже более экстремальные формы затяжных прыжков с парашютом. Предлагаемые формы включают прыжки с верхних слоев атмосферы или даже вхождение в атмосферу из космоса, которое может понадобиться, если обитатели потерпевшего аварию орбитального космического корабля должны безопасно вернуться на землю.
Таким образом, существует растущий рынок для новых высотных платформ для различных новых форм затяжных прыжков с парашютом. Действительно, существует также постоянный спрос на дешевые платформы на высотах до десяти тысяч футов.
Совсем недавно быстрая доставка летательного аппарата в места, представляющие военный интерес, стала практически необходимостью для разведки или других целей. Кроме того, повышается интерес к коммерческому ультразвуковому транспорту. С этой целью во многих странах для удовлетворения этих нужд ведутся разработки гиперзвуковой авиации с двигателями со сверхзвуковым сгоранием.
Однако сообщалось, что двигатели такого воздушного судна, рассчитанные на эффективную работу при больших числах Маха, для запуска требуют достижения скорости, в три раза превышающей скорость звука. Для работы двигателя в различных летных режимах от стационарного до гиперзвукового требуется очень сложное оборудование с сопутствующим избыточным весом. Помимо использования ракетных бустеров для достижения стартовой скорости, другой конструкторский путь требует использования двигателя из двух частей. Первая часть - это турбовентиляторный или турбореактивный двигатель, который преобладает в летном режиме от дозвукового до сверхзвуковых с низким числом Маха, переход к двигателю со сверхзвуковым сгоранием при высоких числах Маха и выключение первой части.
Потому двигатели, рассчитанные на работу только в гиперзвуковом диапазоне, многие без движущихся частей, будут легче, проще по конструкции, а значит и менее дорогими.
В 2003 году американский пилотируемый космический аппарат "Колумбия" был разрушен при входе в атмосферу Земли из-за повреждения конструкции, произошедшей на этапе запуска. Кроме того, со временем происходит скопление орбитальных летательных аппаратов, требующих ремонта, потерпевшие аварию орбитальные летательные аппараты, а также нежелательные и опасные отходы, которые необходимо убрать с орбиты.
Поскольку летательные аппараты, такие как американский космический аппарат "Колумбия", тяжелые, в них нет главных двигателей, которые могут работать продолжительное время после вхождения в атмосферу из-за опасностей и избыточного веса переносимого криогенного или другого топлива, используемого во время полета обратно в атмосферу, эти летательные аппараты должны покидать орбиту в определенных местах, если они должны иметь возможность планировать к нескольким аэропортам с посадочными полосами достаточной прочности и длины, существующими поблизости от их орбитальной траектории.
Поэтому неизбежно, что другие создадут меньшие летательные аппараты, способные выполнять полезную работу за пределами атмосферы с возможности полета с собственным источником энергии в дозвуковом, сверхзвуковом или длительном гиперзвуковом полете в земной атмосфере. Они вполне вероятно могут запускаться с использованием мощности ракетного двигателя и после вхождения в атмосферу лететь к любому из большого количества гражданских или военных аэродромов, подходящих для меньших воздушных судов, и безопасно приземлиться.
Они будут использоваться для быстрого и безопасного возврата пассажиров поврежденных орбитальных летательных аппаратов, ремонта или удаления потерпевших аварию непилотируемых орбитальных летательных аппаратов, а также нежелательных и опасных отходов. Еще один вариант, который скоро поступит в эксплуатацию, - это небольшое служебное транспортное средство для заправки и присоединения к потерпевшему аварию космическому кораблю и выполнения роли буксира для продления технического ресурса таких транспортных средств. Затем небольшие судна или ракеты могут использоваться для запуска небольших спутников или модульных компонентов для сборки и заправки крупных конструкций на орбите, которые могут использоваться для преодоления гравитационного поля Земли для возможного отклонения опасных астероидов или исследования Солнечной системы. Европейское космическое агентство и его российский аналог "Роскосмос" недавно начали рассматривать вопрос создания ремонтной базы на низкой земной орбите для облегчения миссий на Луну или Марс с использованием современного возвращаемого летательного аппарата (ARV), который еще предстоит создать.
Кроме того, ожидается постоянный спрос на служебные спутники и прочие орбитальные летательные аппараты. Такое обслуживание может включать доставку пищи, топлива, сжатых или сжиженных газов для дыхания и прочего применения, медикаментов и научных материалов, электрического, механического и прочего оборудования для замены или обновления систем корабля, транспортировки больного или травмированного персонала либо замены персонала.
Поэтому ожидается, что будет существовать потребность в быстрых недорогих средствах запуска модульных компонентов для сборки и заправки в космосе, небольших рабочих катеров, небольших спутников и других устройств.
Чувствительность многих телескопов, используемых в астрономии, значительно ухудшилась из-за атмосферной пыли и аэрозолей, потому что свет отражается и рассеивается их частичками. Менее всего пострадавшие телескопы обычно находятся на вершинах далеких гор, значительно выше атмосферы, в которой находится большая часть пыли и аэрозолей.
Поэтому существует потребность в высоких платформах, на которых могут устанавливаться чувствительные телескопы. В частности, несколько платформ и телескопов могут использоваться для имитации телескопа с очень большой апертурой, которые сейчас используются для обнаружения планет в других солнечных системах.
После того как случилось разрушительное цунами в Индонезии в декабре 2004 года, стало очевидно, что поиск на многих пострадавших территориях и последующая доставка начальной помощи задержалась на несколько дней или даже недель со дня происшествия, в результате чего многие десятки тысяч людей умерли; причем количество жертв было бы гораздо меньше, если бы помощь подоспела раньше. Поэтому существует необходимость в быстрых суборбитальных системах пуска ракет для доставки многочисленных небольших непилотируемых самолетов и тысяч тонн спасительной помощи, доставляемой на парашюте, управляемом GPS на последнем этапе при помощи простых одноразовых ракет под управлением GPS.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Соответственно существует потребность в способе доставки полезных материалов, таких как топливо, газы для жизнеобеспечения и т.п. и изделий в верхние слои атмосферы и выше, по такой цене за единицу доставляемой массы, которая значительно ниже имеющихся на данный момент на рынке, в котором используются доступные на данный момент материалы и технологии. Более того, будет полезно для экологии минимизировать массу материала, используемого для выведения транспортного средства за пределы земной атмосферы путем использования гидроэлектрической, геотермальной или солнечной энергии от фотоэлектрических батарей для подъема транспортного средства как можно выше, прежде чем зажигать двигатель или двигатели транспортного средства.
Целью настоящего изобретения является создание пусковой установки для ракет с высокой частотой пусков для отправки полезных грузов в космос, а также к спутникам, находящимся в космосе.
Еще одной другой целью настоящего изобретения является создание пусковой установки для ракет с высокой частотой пусков, в которой может использоваться гидроэлектричество или другой возобновляемый источник энергии для подъема ракеты на высоту пуска.
Другой целью является использованием более экологически чистого топлива и окислителя, сделанного с использованием альтернативной или возобновляемой энергии.
Еще одной другой целью настоящего изобретения является создание верхней вращающейся пусковой станции, в которой используются электроприводные пусковые тележки, при этом пусковая станция присоединена к земле тросами, к которым крепятся аэростаты для натяжения и поддержания тросов и связанных конструкций.
Дополнительной целью настоящего изобретение является обеспечение средства рекуперации потенциальной энергии, возникающей при возврате пустых тележек пуска ракет на землю после запуска по привязям путем использования рекуперативного торможения с применением двигателей-генераторов для повторного использования этой энергии.
Еще одной другой целью настоящего изобретения является обеспечение атмосферного контроля на более постоянной основе, поскольку повышенные уровни "парниковых" газов или других загрязняющих веществ в атмосфере приводят к изменениям в глобальной погоде.
Другой целью настоящего изобретения является создание высоких радарных платформ и платформ радиосвязи для существенного повышения покрываемого пространственного объема и площади поверхности земли.
Другой целью настоящего изобретения является обеспечение постоянной, коммерческой, предоставляемой по разумной цене возможности для туристов посещать уровни атмосферы, недоступные для других средств, за исключением ракет, самолетов и свободно летящих летательных аппаратов легче воздуха.
Еще одной другой целью настоящего изобретения является создание более высоких платформ, чем имеющиеся на сегодняшний день, для различных новых форм затяжных прыжков с парашютом с чрезвычайно большой высоты или космоса, а также дешевых платформ на высотах до десяти тысяч футов, к которым можно добраться без дополнительных кислородных или высотно-компенсационных скафандров.
Другой целью настоящего изобретения является обеспечение быстрого, недорогого средства запуска небольших рабочих летательных аппаратов для безопасного возврата пассажиров поврежденных орбитальных летательных аппаратов, ремонта или удаления потерпевших аварию непилотируемых орбитальных летательных аппаратов, а также нежелательных и опасных отходов.
Еще одной целью настоящего изобретения является создание высоких платформ над слоями облаков Земли, на которых могут устанавливаться чувствительные телескопы, особенно те, которые могут при помощи компьютерных средств комбинировать электромагнитные волны, в том числе световые и радио волны, полученные так, чтобы действовать в качестве единого телескопа с диаметром равным расстоянию до самых дальних компонентов матрицы, для обеспечения лучших возможностей наблюдения, чем имеются на сегодняшний день, за исключением космических телескопов.
Дополнительной целью является обеспечение средства обслуживания спутников и других орбитальных летательных аппаратов, например, для доставки пищи, сжатых или сжиженных газов для дыхания и прочего применения, топлива, медикаментов и научных материалов, электрического, механического и прочего оборудования для замены или обновления систем корабля, транспортировки больного или травмированного персонала либо замены персонала.
Целью является обеспечение транспортной системы для транспортировки загружаемых ракетами тележек вдоль тросов, идущих через атмосферу к пусковой станции.
Дополнительной целью является обеспечение тележек для переноса ракет вдоль тросов к пусковой станции, расположенной высоко в атмосфере.
Еще одной дополнительной целью является обеспечение аппарата для удержания и направления загружаемых ракетами тележек на аппарат для перемещения тележек вдоль тросов к пусковой станции, расположенной высоко в атмосфере, а также для перемещения пустых тележек с пусковой станции на землю.
Еще одной дополнительной целью является обеспечение системы для безопасного хранения ракет, а также для доставки ракет или загружаемых ракетами тележек к аппарату для транспортировки ракет или загружаемых ракетами тележек на пусковую станцию, расположенную высоко в атмосфере.
Обеспечение аппарата для транспортировки загружаемых на ракету тележек также является целью изобретения.
Другой целью изобретения является система для транспортировки ракет, компонентов ракет, тележек для ракет и/или держателей транспортировочных устройств для ракет с места хранения на установку удержания и сборки для последующей транспортировки на аппарат для подъема загружаемой ракетами тележки к пусковой станции.
Дополнительной целью настоящего изобретения является обеспечение поперечного загрузчика для загрузки ракет на тележки.
Дополнительной целью является обеспечение подъемной сборки для подъема загруженной ракетами тележки к аппарату для погрузки загруженной ракетами тележки на ряд поднятых тросов к станции пуска ракет.
Дополнительной целью является обеспечение башни для приема загружаемой ракетами тележки и сопутствующей аппаратуры для ориентации загружаемой ракетами тележки на аппарат направляющей конструкции для расположения загружаемой ракетами тележки на тросах, направленных к пусковой станции.
Еще одной другой целью изобретения является обеспечение устройств для присоединения аэростатов к системе тросов для стабильного удержания и разделения тросов, направленных к пусковой станции.
Еще одной целью изобретения является обеспечение стыковочной станции для стыковки загружаемой ракетами тележки с рядом тросов, идущих к пусковой станции.
Обеспечение электропитания для транспортировки загружаемой ракетами тележки вдоль системы тросов к поднятой на высоту пусковой станции является другой целью настоящего изобретения.
Другой целью настоящего изобретения является обеспечение подъемного кольца для подъема загруженной ракетами тележки вдоль системы тросов над стыковочной станцией.
Дополнительной целью является обеспечение устройства для отделения тросов от земли к поднятой на высоту пусковой станции и для стабилизации тросов.
Также целью настоящего изобретения является обеспечение соединительного аппарата для крепления рам и другого аппарата к тросам, идущего между землей и поднятой на высоту пусковой станцией.
Обеспечение аппарата для удержания ракеты внутри тележки также является целью настоящего изобретения.
Другой целью является обеспечение монтажного кронштейна телескопа для использования с рядом тросов, удерживаемых вертикально в атмосфере.
Обеспечение ракеты, перемещаемой вертикально в тележке для удержания лица или лиц, оборудования и предметов также является целью настоящего изобретения.
Дополнительной целью настоящего изобретения является усовершенствованный гидростатический компенсационный скафандр, который должен носить человек, чтобы выдержать высокие ускорения во время пуска ракеты и возврата в атмосферу.
Эти цели достигаются согласно предпочтительным вариантам осуществления изобретения, которые описываются ниже. Другие цели будут очевидны специалистам в данной области из идей изобретения, которые обсуждаются ниже, а также из прилагаемых пунктов формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ФИГУР
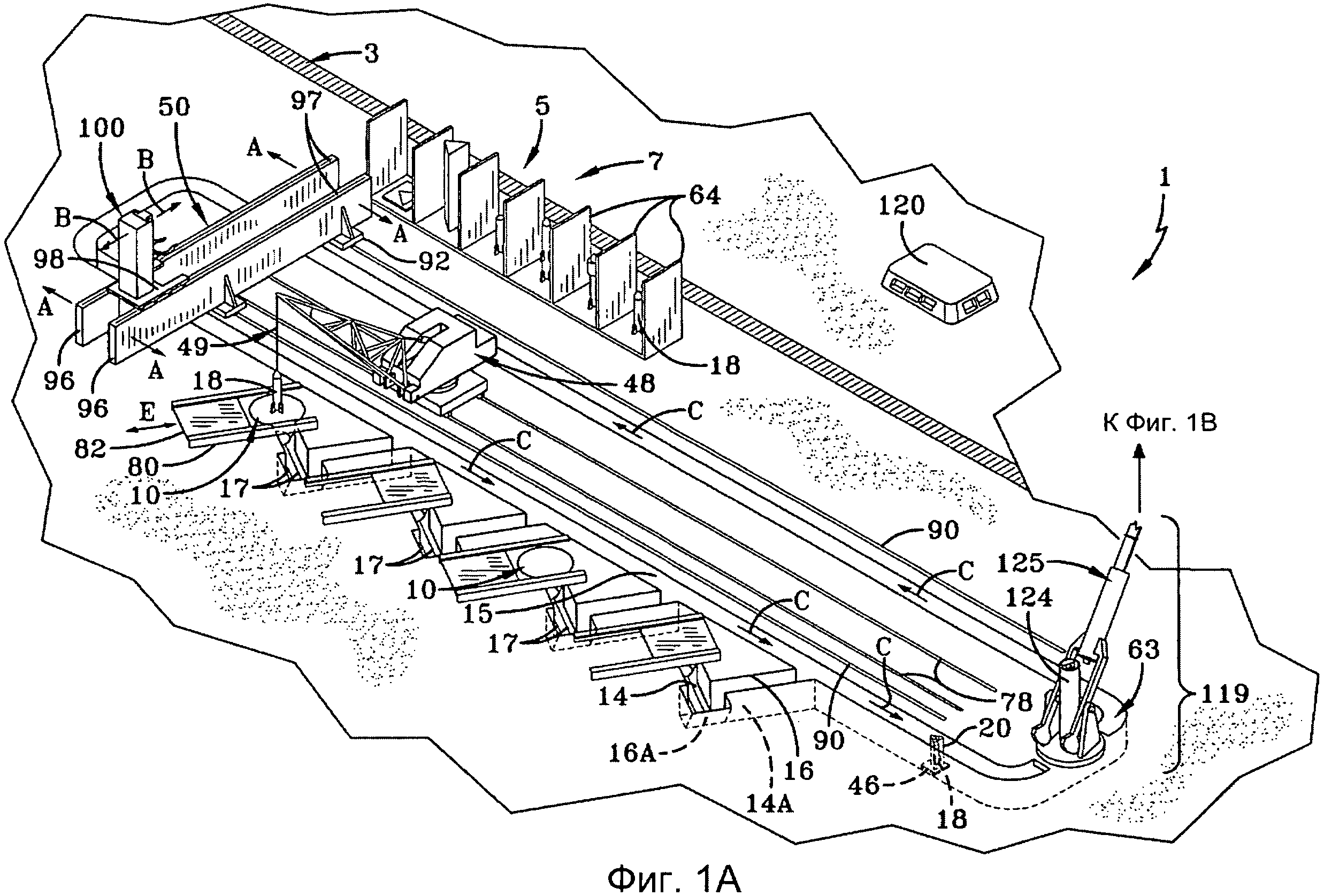
На фиг.1 в схематической форме показаны некоторые элементы предпочтительного варианта осуществления системы пуска ракет по настоящему изобретению.
На фиг.1А и 1В показан детальный вид элементов, показанных на Фиг.1.
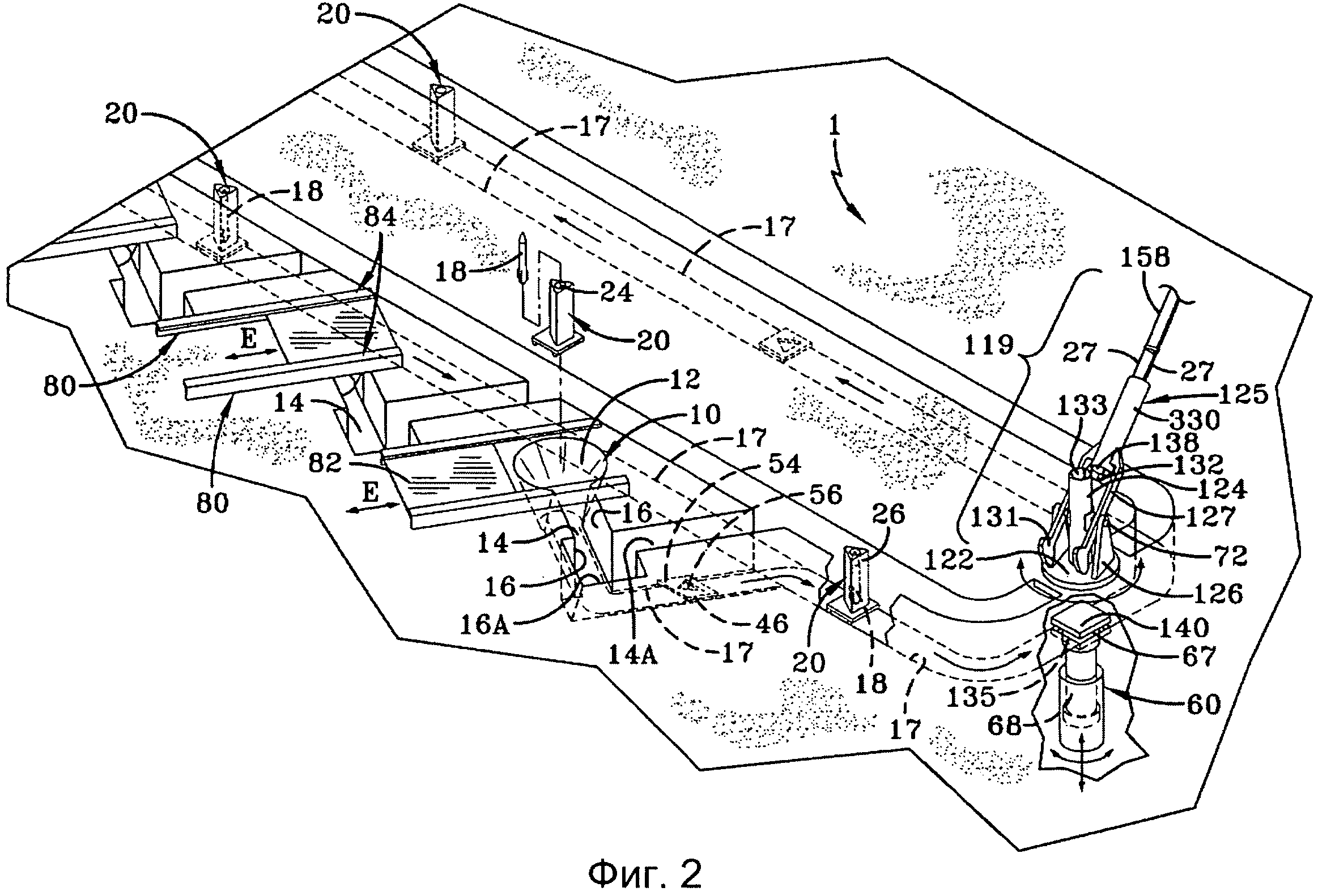
На фиг.2 схематическое изображение сборки и основной загрузочной части системы пуска ракет согласно предпочтительному варианту осуществления изобретения.
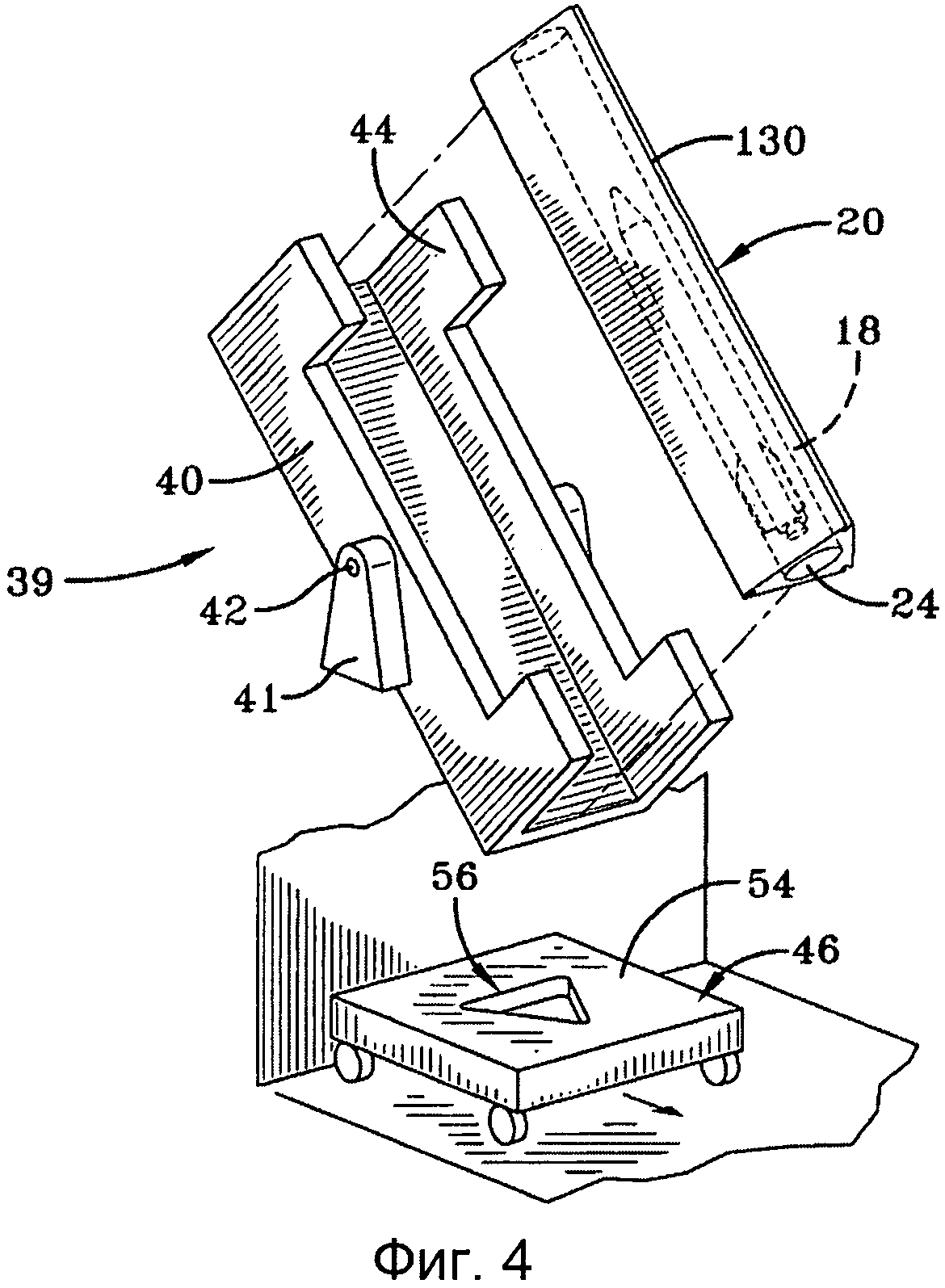
На фиг.3 показана загрузка ракеты в боковое транспортировочное устройство согласно аспекту предпочтительного варианта осуществления изобретения.
На фиг.4 приведено схематическое изображение другого вида тележки, удерживающей ракету, опрокидывающий механизм и боковое транспортировочное устройство.
На фиг.5 приведено схематическое изображение плана следящей системы для тележек, стеллажей для хранения, станции удержания и сбора ракет, тележки, аппарат хранения топлива и система электропитания для подготовки ракет к пуску согласно предпочтительному варианту осуществления изобретения.
На фиг.5А приведен увеличенный детальный вид части колей, показанных на фиг.5.
На фиг.6 в схематическом виде показана загрузка ракеты в отсек заправки или сборки согласно предпочтительному варианту осуществления изобретения.
На фиг.7 приведен, детальный вид поперечного загрузчика, показанного на фиг.6.
На фиг.7А приведен увеличенный детальный перспективный чертеж ножки и торсионного стопорного штифта, показанного на фиг.7.
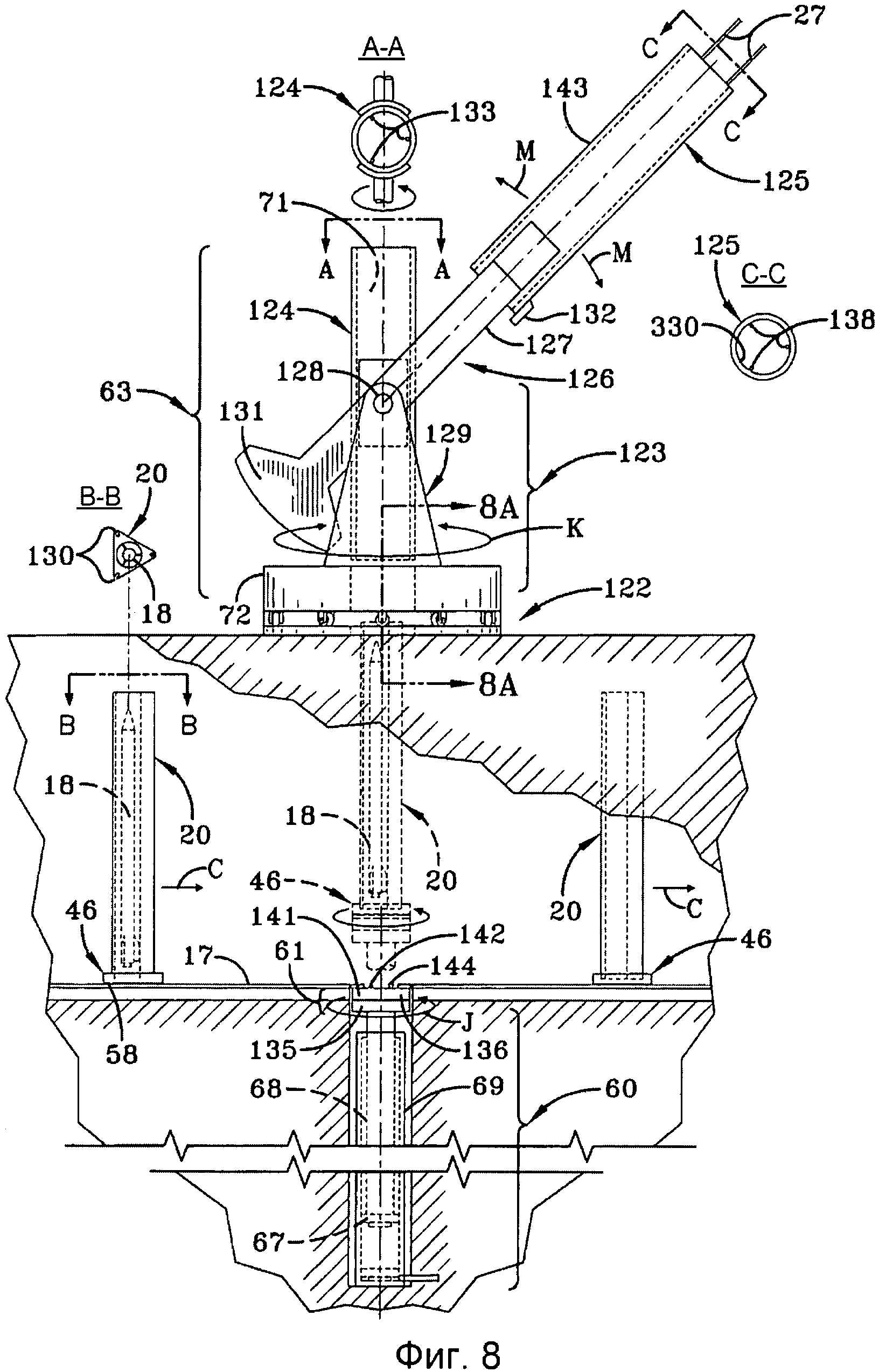
На фиг.8 приведен схематический вид работы подъемной системы предпочтительного варианта осуществления изобретения с боковым транспортировочным устройством и тележкой удержания ракеты.
На фиг.8А приведен увеличенный детальный вид одного варианта аппарата для поддержания поворотной платформы для вращения.
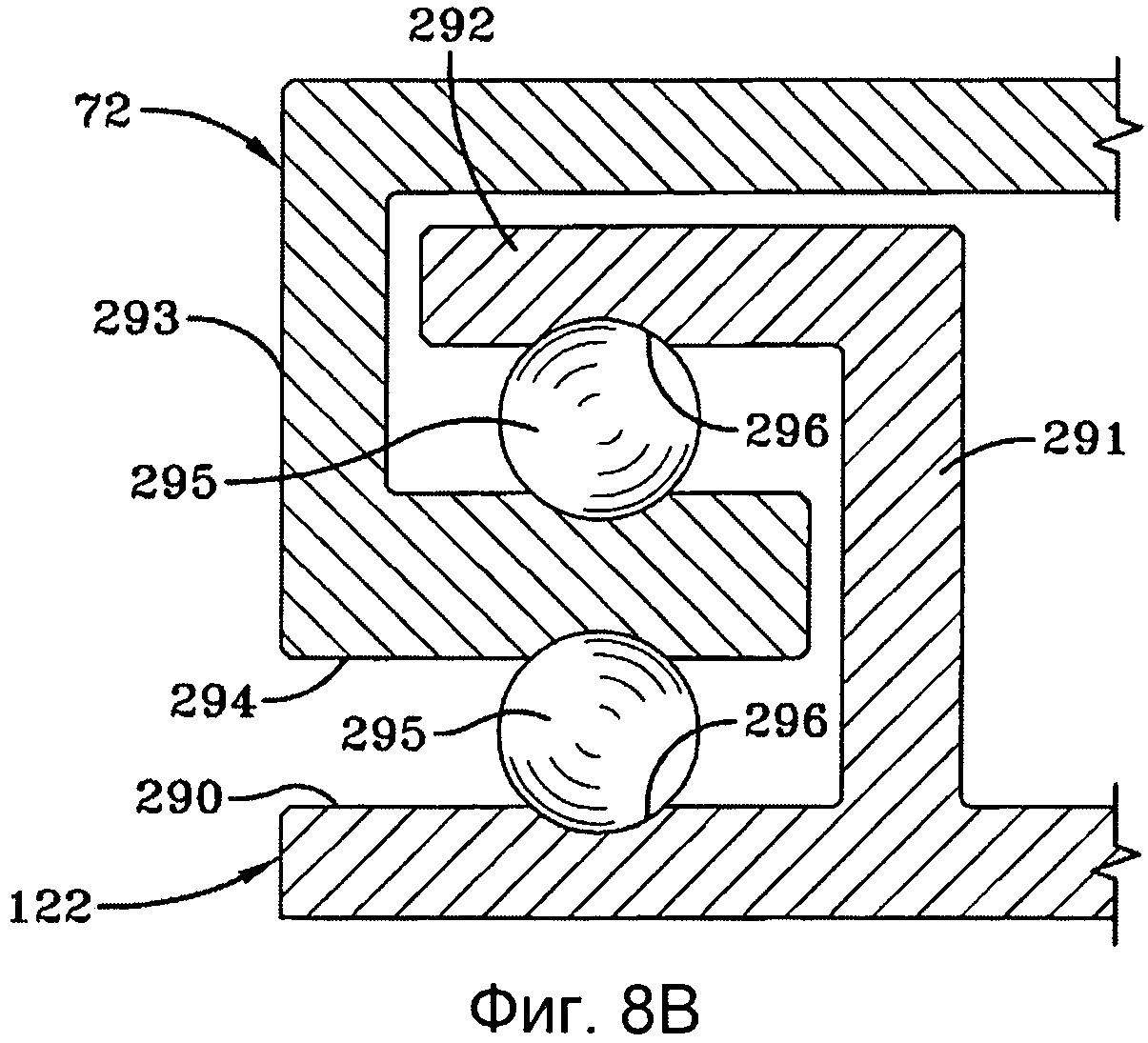
На фиг.8В приведен увеличенный детальный вид другого варианта аппарата для поддержания поворотной платформы 72 для вращения.
На фиг.9 приведен схематический вид подъемной системы, вращающегося основания, бокового транспортировочного устройства, части тележки согласно предпочтительному варианту осуществления изобретения.
На фиг.9А приведен увеличенный перспективный вид конусообразного центрирующего штифта.
На фиг.9В приведен увеличенный перспективный вид фрагмента торсионного стопорного штифта.
На фиг.9С приведен увеличенный детальный вид основания тележки.
На фиг.10 показан аппарат для приема, выравнивания и начала вставки тележки, удерживающей ракету, в кабельный/тросовый путь согласно предпочтительному варианту осуществления изобретения.
На фиг.10А приведен увеличенный детальный вид разделителя троса.
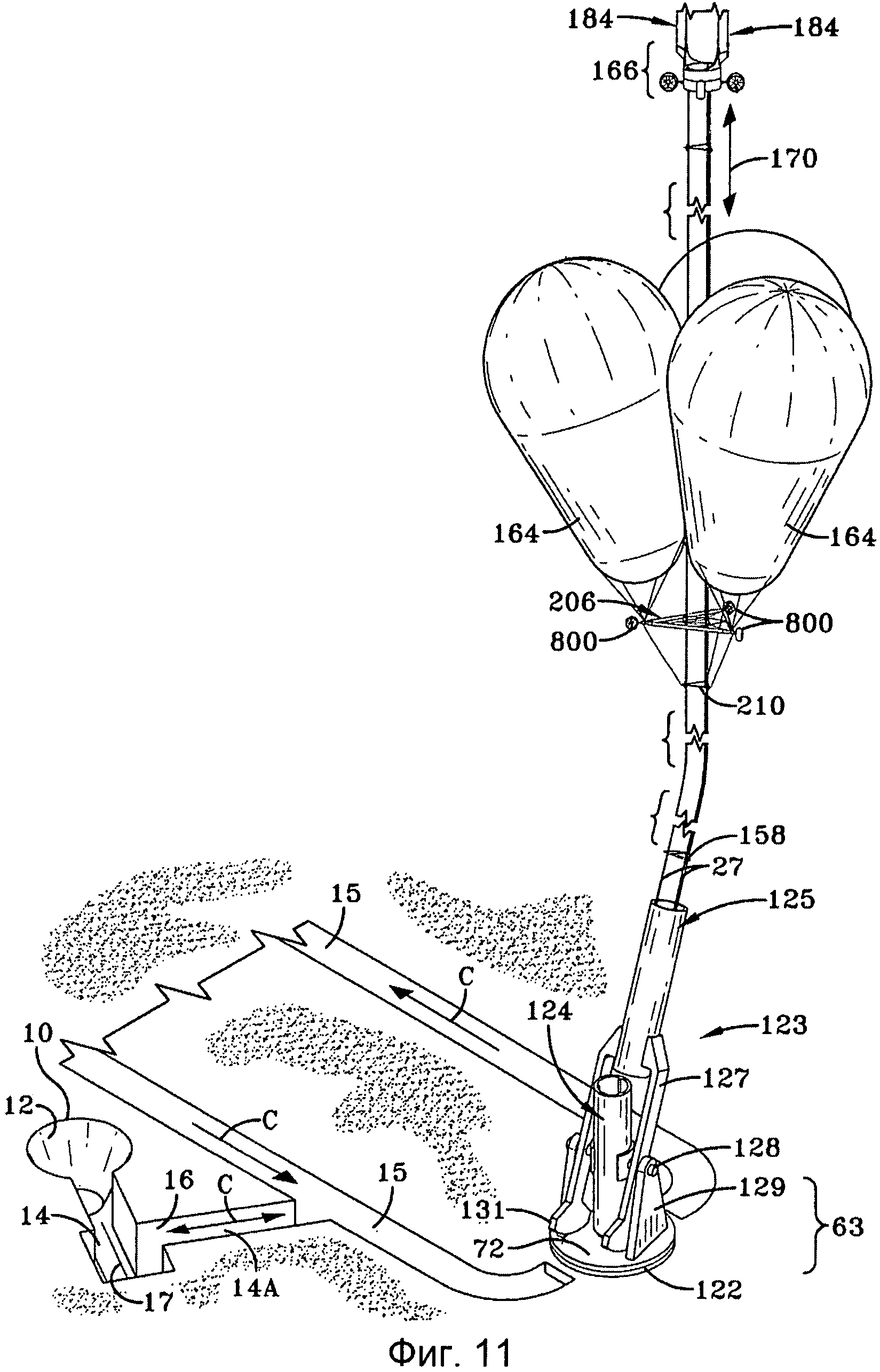
На фиг.11 показана еще одна часть предпочтительной части изобретения по отношению к кабельной системе для транспортировки тележек, удерживающих ракету.
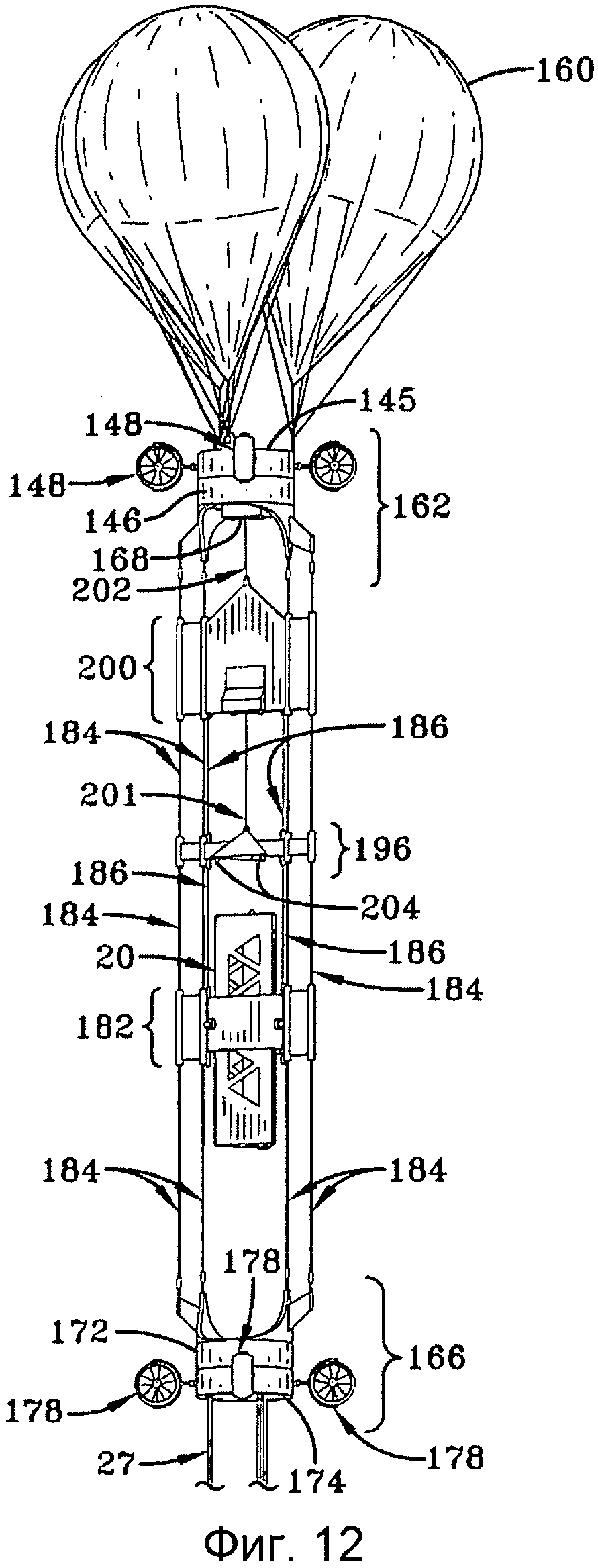
На фиг.12 приведена деталь верхней части предпочтительной формы изобретения в схематической форме, на которой показана совокупность аэростатов для подъема системы тросов и размещенных на них частей согласно предпочтительному аспекту настоящего изобретения для подъема тележки, удерживающей ракету.
На фиг.13 приведен схематический вид верхней части предпочтительной части настоящего изобретения, на котором показана часть системы тросов и различные присоединенные к ней компоненты.
На фиг.13А приведен вид тележки сзади с конечной крышкой в открытом положении.
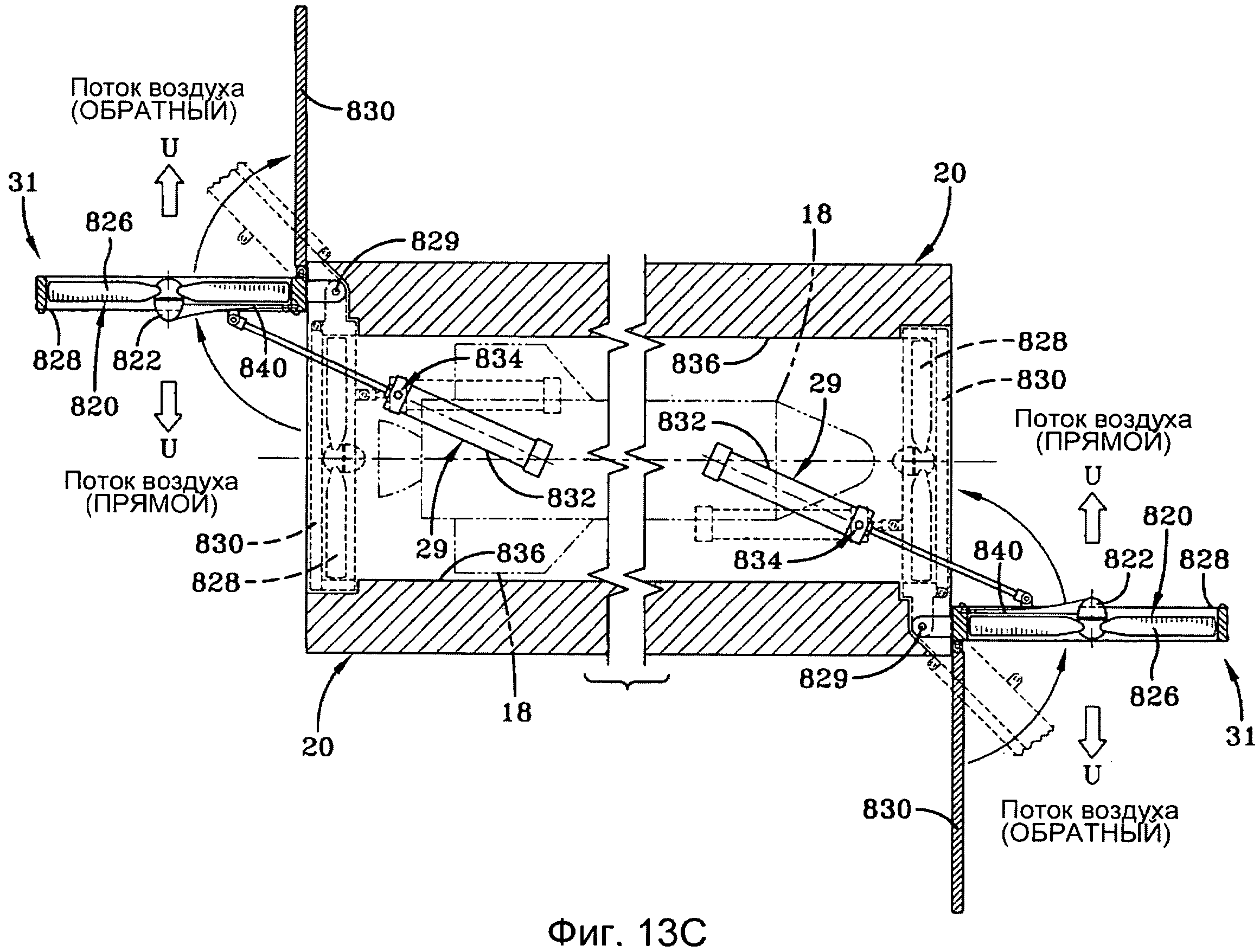
На фиг.13В приведен перспективный вид конца тележки для использования в аппарате, показанном на фиг.13, а на фиг.13С - вид тележки сбоку частично в разрезе, на котором показаны рабочие положения некоторых ее компонентов.
На фиг.14 приведен схематический вид в разрезе предпочтительного варианта осуществления изобретения, на котором показана система тросов и различные присоединенные к ней части.
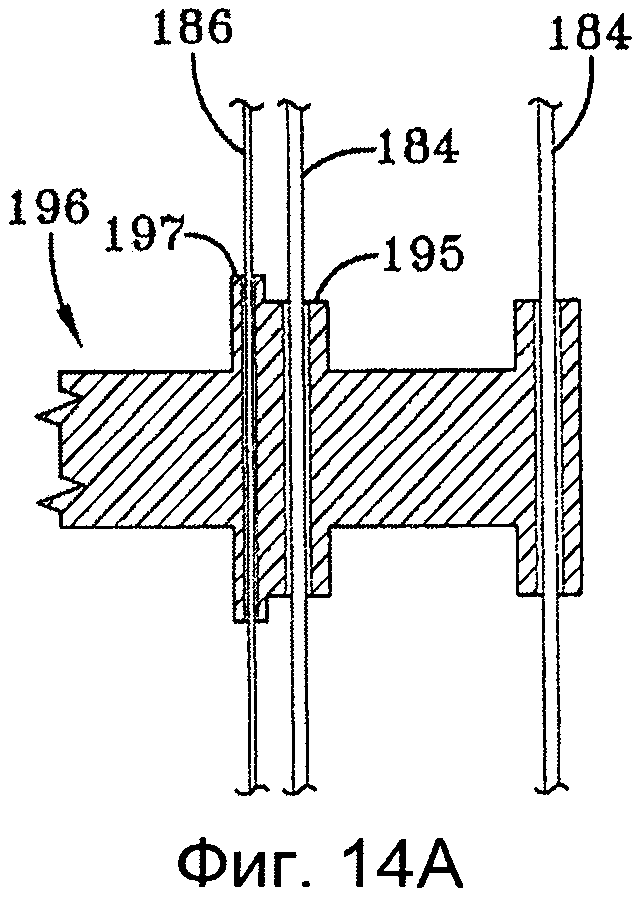
На фиг.14А приведен увеличенный детальный вид части концевого захвата тележки.
На фиг.15 приведен схематический вид предпочтительного варианта осуществления изобретения, на котором показана стабилизационная часть для аэростатов и системы тросов.
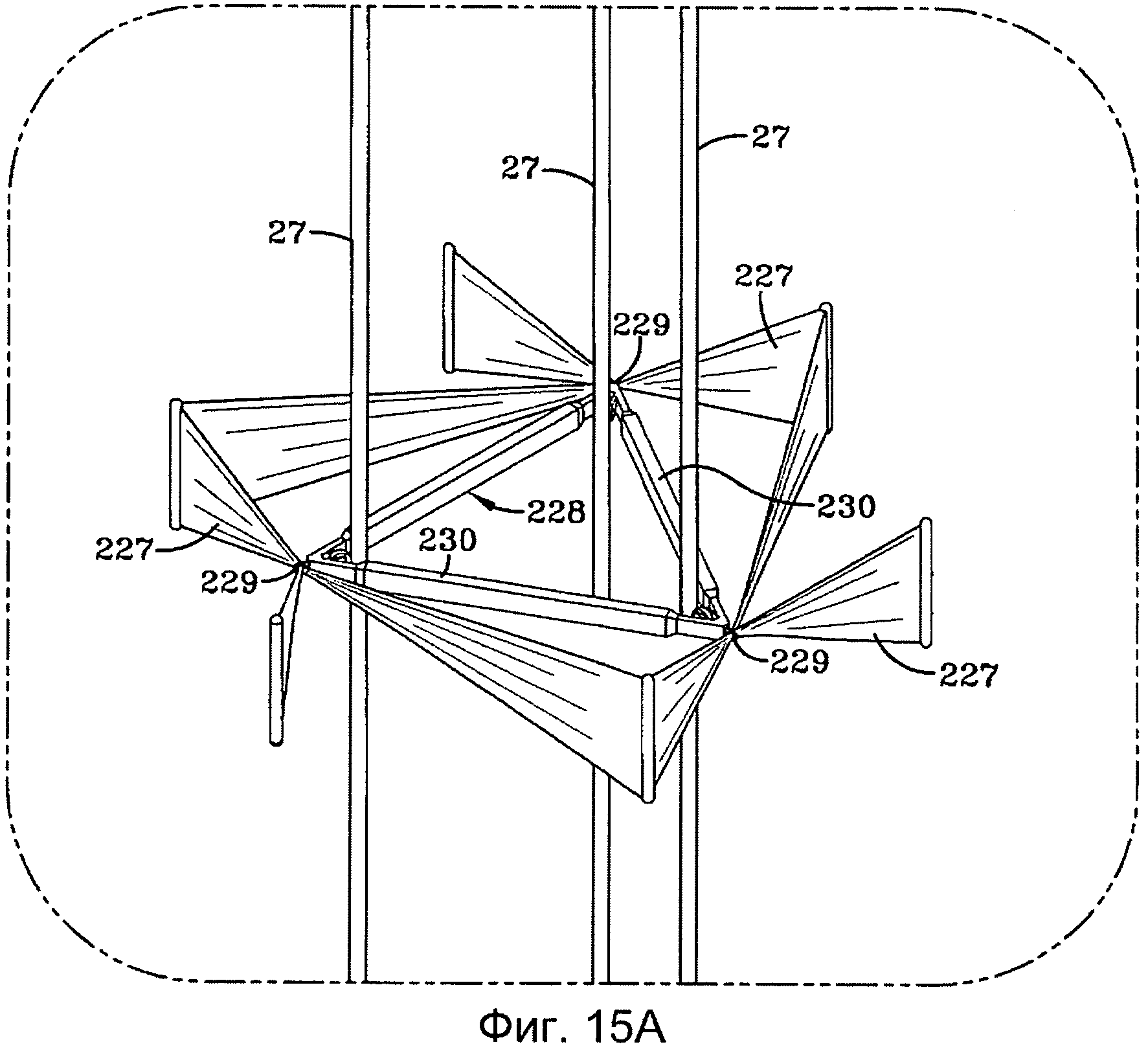
На фиг.15А приведен детальный вид части стабилизационной части аэростатов, показанной на фиг.15.
На фиг.15В приведен покомпонентный перспективный вид соединения верхнего разделителя к тросу, а на фиг.15С - его вид сверху.
На фиг.15D приведен увеличенный перспективный вид конструкции крепления тросов на середине кронштейна разделительного блока.
На фиг.15Е приведен покомпонентный перспективный вид соединения нижнего разделителя к тросу и большому стропу.
На фиг.16 приведен детальный схематичный вид сверху части стабилизационной части предпочтительной формы изобретения, в направлении 16-16 на фиг.15.
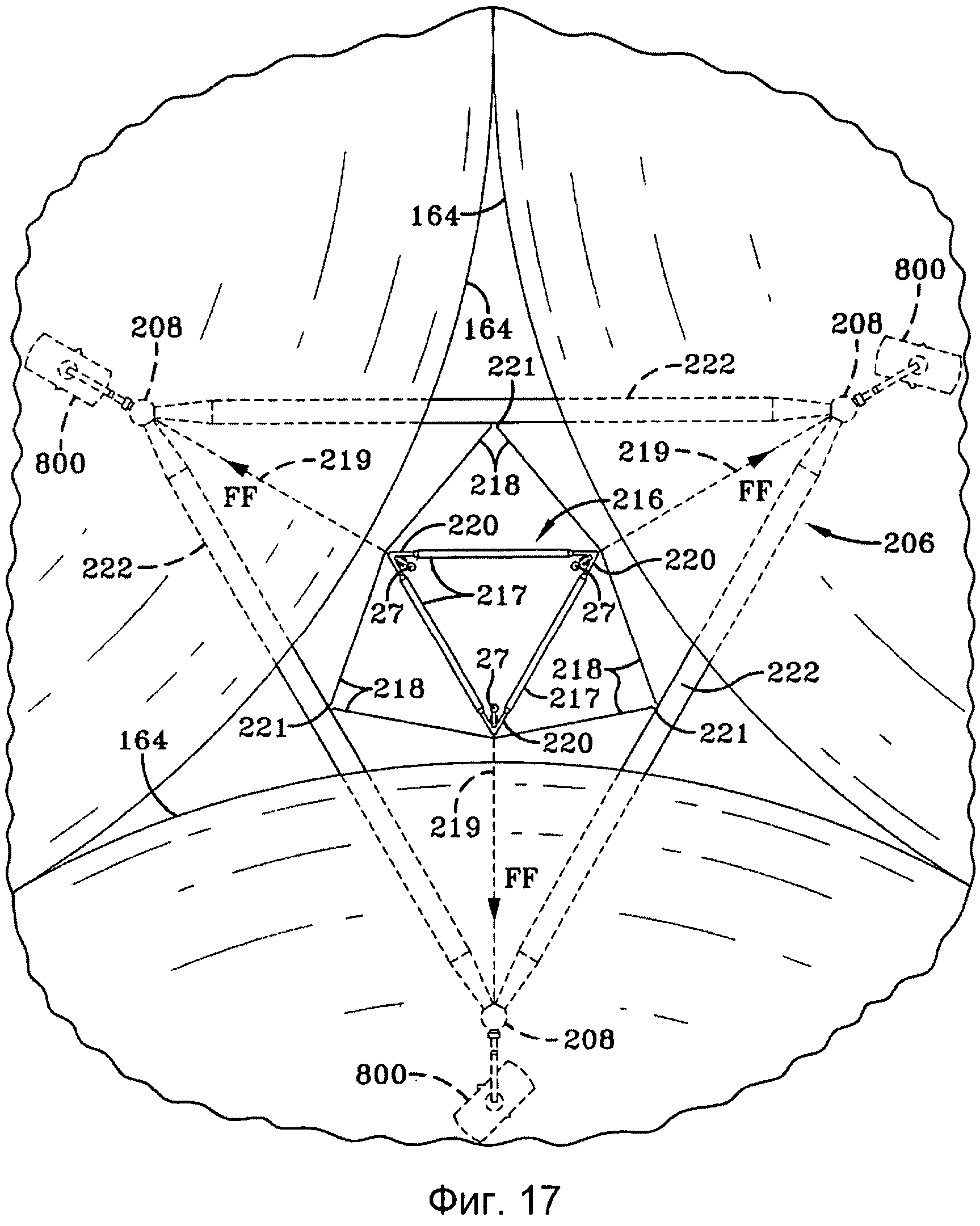
На фиг.17 приведен другой детальный вид части стабилизационной части предпочтительного варианта изобретения, взятого в направлении 17-17 на фиг.15, на котором показаны определенные векторы силы.
На фиг.18 приведен перспективный схематический вид стабилизационной системы с толкателями согласно предпочтительному варианту осуществления изобретения.
На фиг.19 приведен перспективный вид устройства стабилизации тросов согласно предпочтительному варианту изобретения.
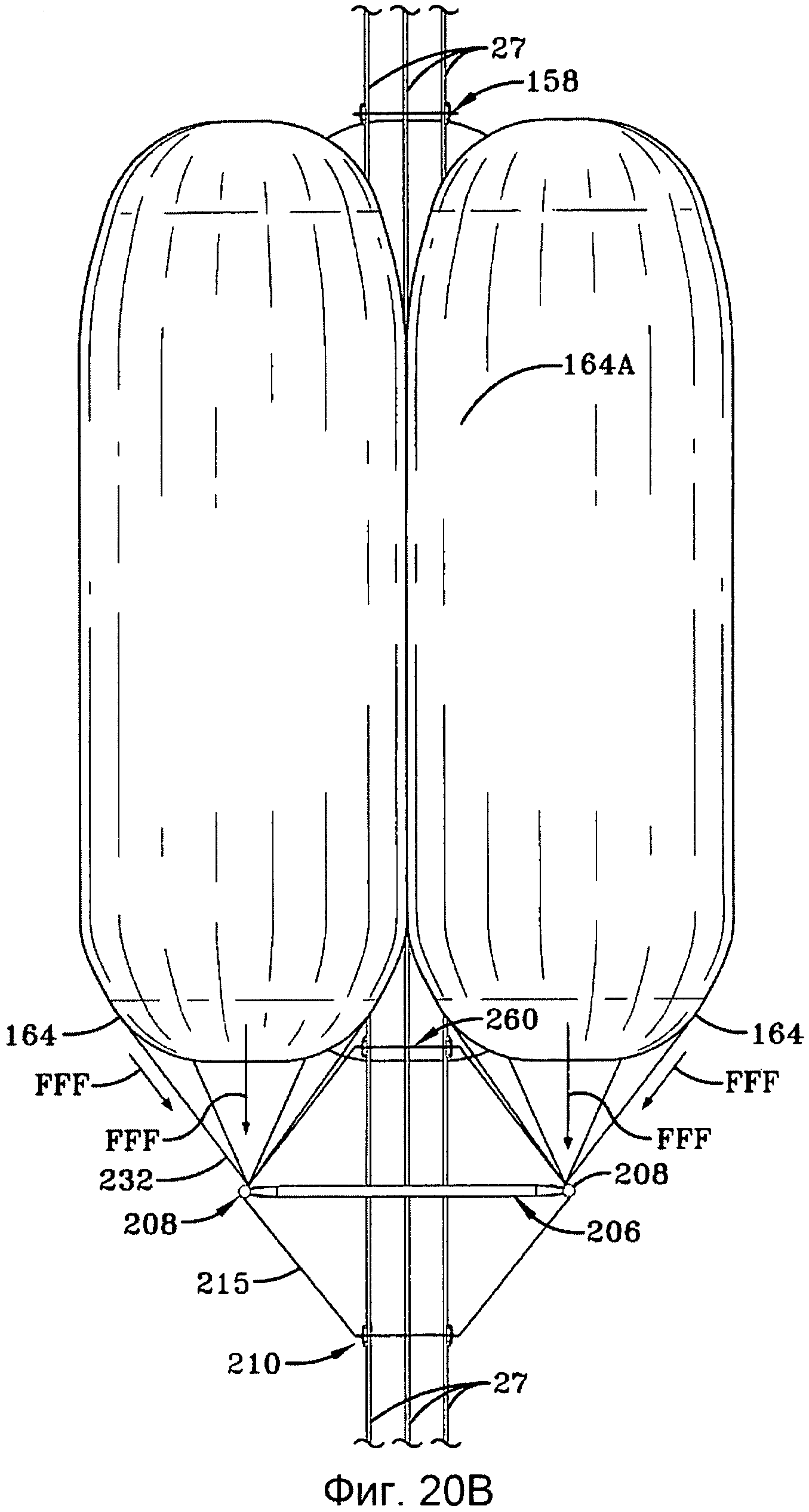
На фиг.20А и 20В приведены виды сбоку двух из большого количества основных наборов аэростатов, присоединенных к системе тросов согласно предпочтительным формам выполнения изобретения.
На фиг.21 приведен перспективный вид многожильного троса, который может использоваться в кабельном/тросовом пути системы пуска согласно предпочтительной форме выполнения изобретения.
На фиг.22 приведена конструкция установки элементов к боковой части троса, как показано на фиг.21.
На фиг.23 и 24 приведены виды в разрезе вариантов конструкции, показанной на фиг.22.
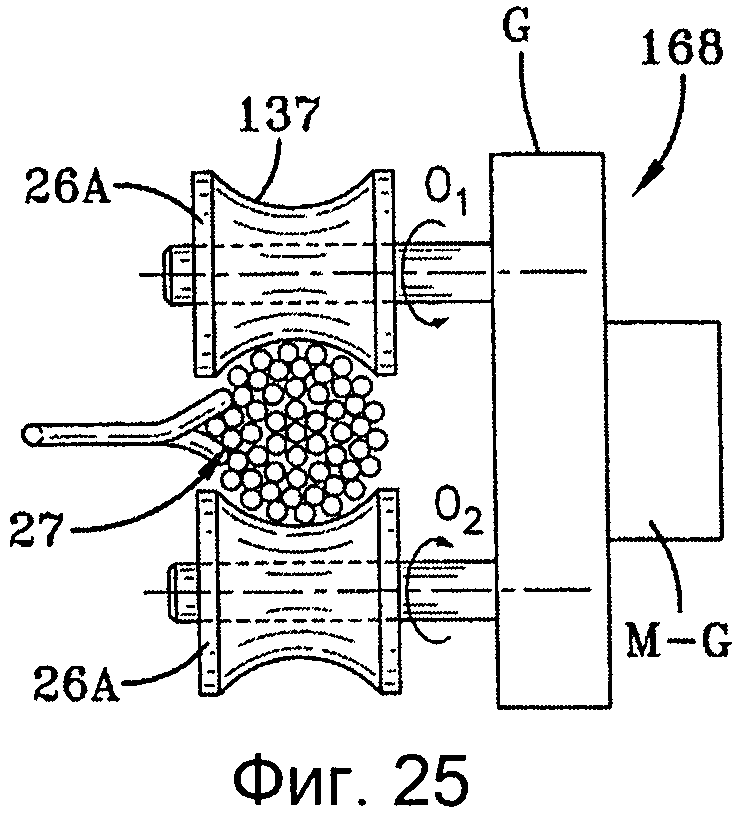
На фиг.25 показан вид в разрезе сцепления троса колесиками фрикционного привода для перемещения троса вверх или вниз согласно предпочтительному варианту осуществления изобретения.
На фиг.26 приведен перспективный вид отводного кронштейна согласно предпочтительному варианту осуществления изобретения.
На фиг.27 приведен детальный вид отводного кронштейна для удержания ракеты на тележке согласно предпочтительному варианту осуществления изобретения.
На фиг.28 приведен схематический вид верхней части предпочтительного варианта осуществления изобретения пуска ракет, если сверху на главном подъемном шаре или шарах будет устанавливаться телескоп.
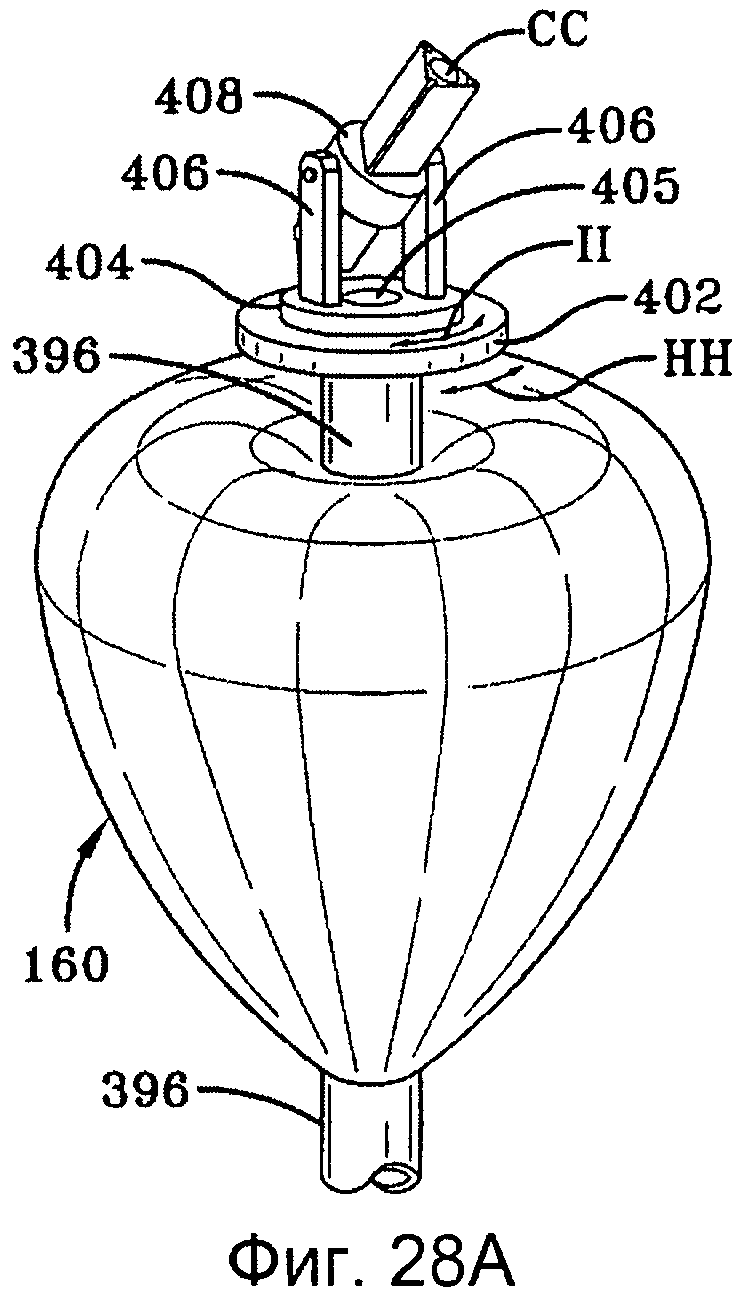
На фиг.28А приведен перспективный вид верхней части фиг.28.
На фиг.28В приведен детальный, увеличенный вид в разрезе части аппарата, показанного на фиг.28, включающего зубчатую вращательную приводную систему и кольцевую опору, а на фиг.28С - направление 28С-28С фиг.28В, и в общем показано, как тросы могут завершаться.
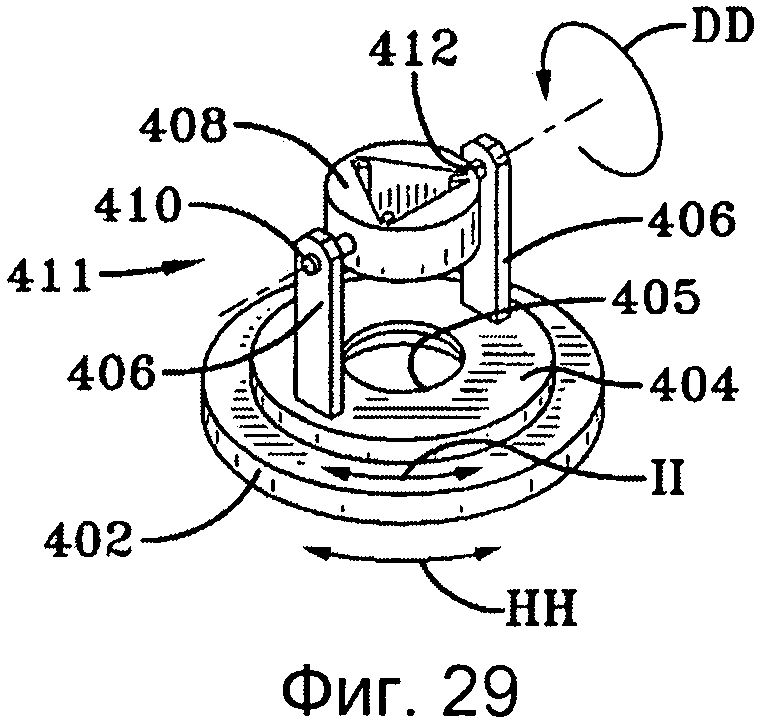
На фиг.29 показан возможный монтажный кронштейн телескопа для использования в варианте осуществления, показанном на фиг.28, при этом изображение приведено в детальной перспективной форме.
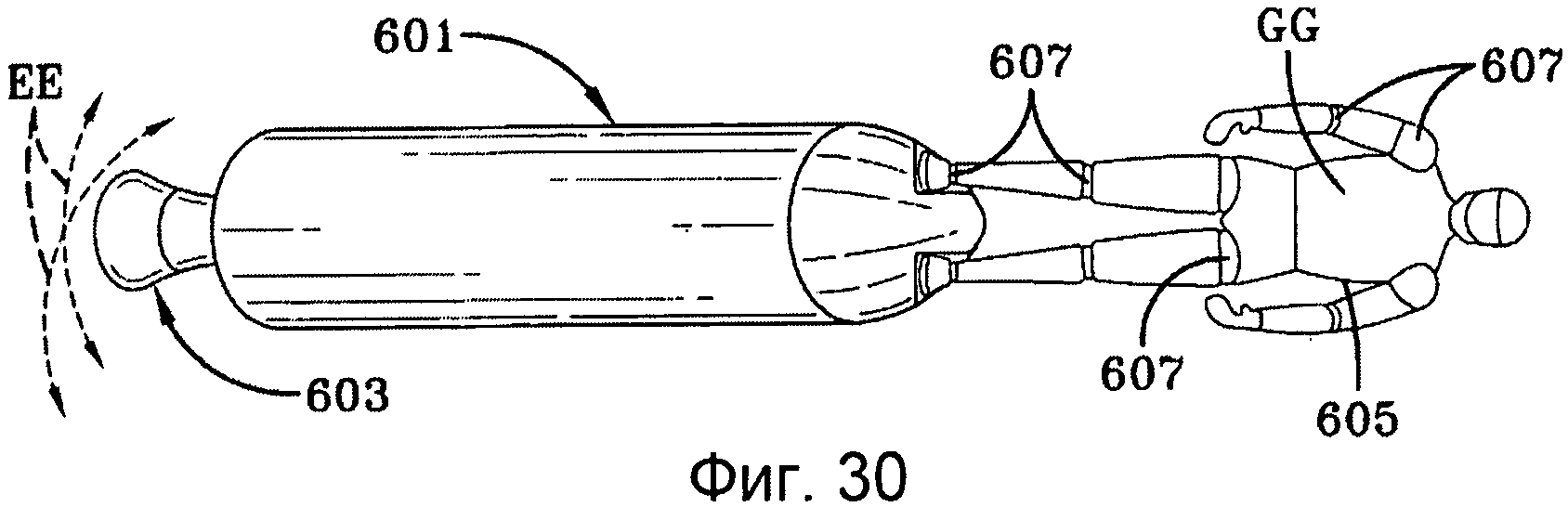
На фиг.30 приведен схематический вид ракеты для запуска одного человека в скафандре согласно предпочтительному варианту осуществления изобретения.
На фиг.31 показан вариант ракеты для нескольких отдельно отсоединяемых капсул или людей в скафандре.
На фиг.32 показан человек в скафандре на отсоединяемой раме возврата в атмосферу с воздушным острием для инициирования акустической волны.
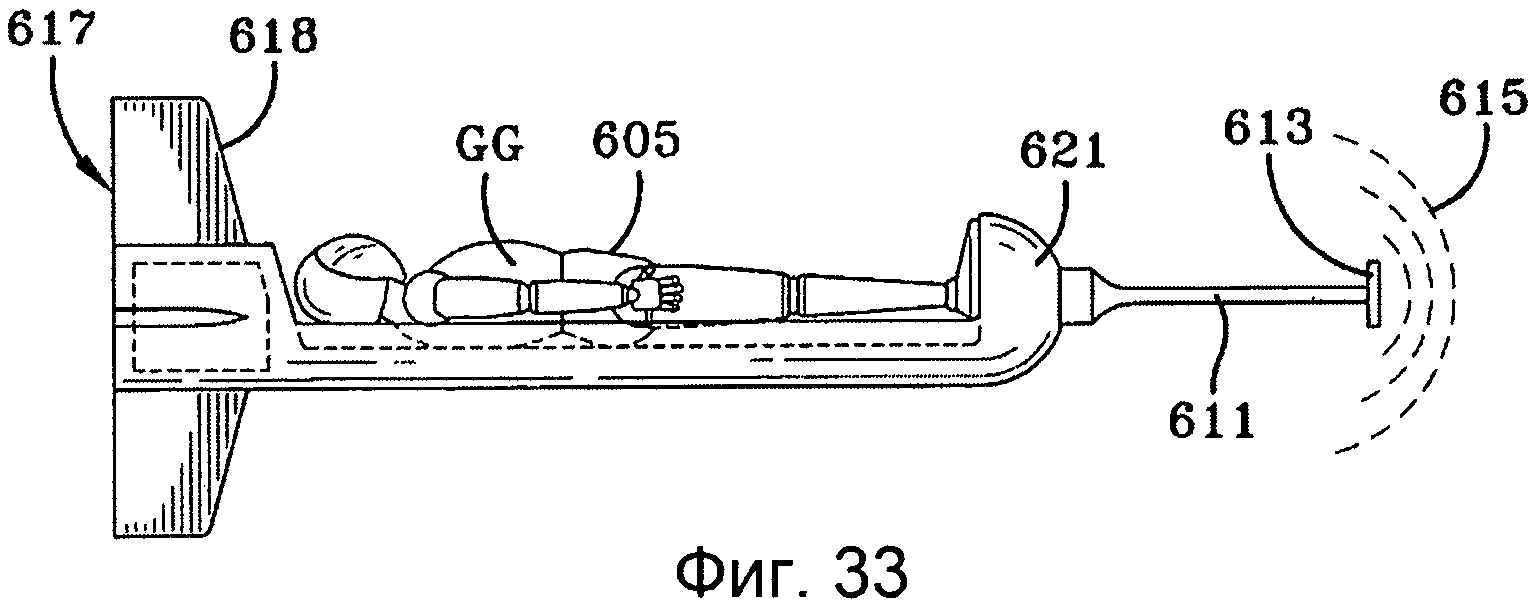
На фиг.33 показан другой вариант отсоединяемой рамы возврата в атмосферу с воздушным острием для инициирования акустической волны.
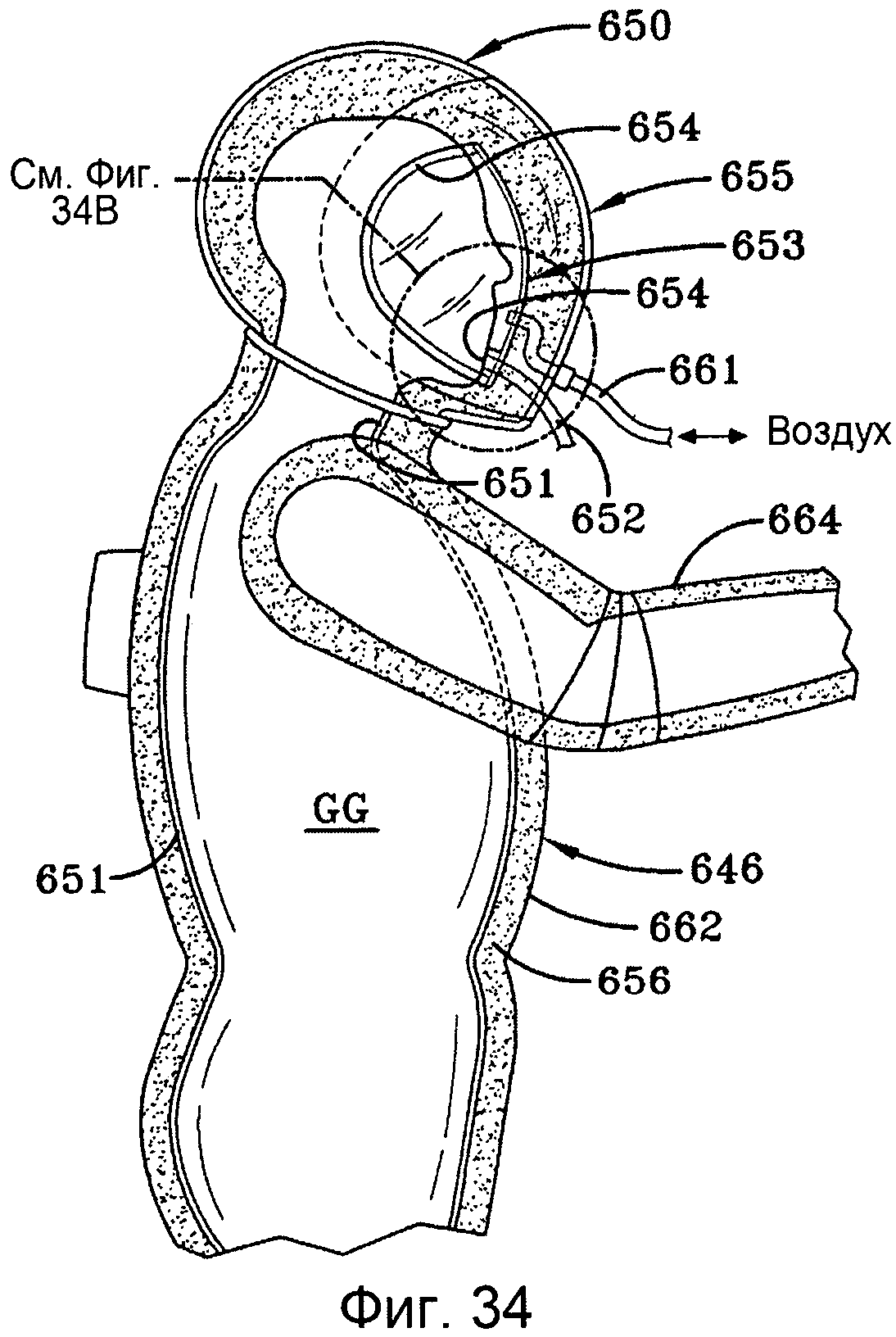
На фиг.34 приведен схематический вид скафандра, который должен носить пассажир согласно предпочтительному варианту осуществления изобретения при выходе из атмосферы и возврате в атмосферу.
На фиг.34А приведен детальный вид шлема скафандра, показанного на фиг.34, а на фиг.34В - другой детальный вид шлема скафандра фиг.34.
На фиг.35 показан аппарат для одного из методов изменения внутреннего объема скафандра, показанного на фиг.34.
На фиг.36 показан детальный вид конечности человека и части скафандра, показанного на фиг.34.
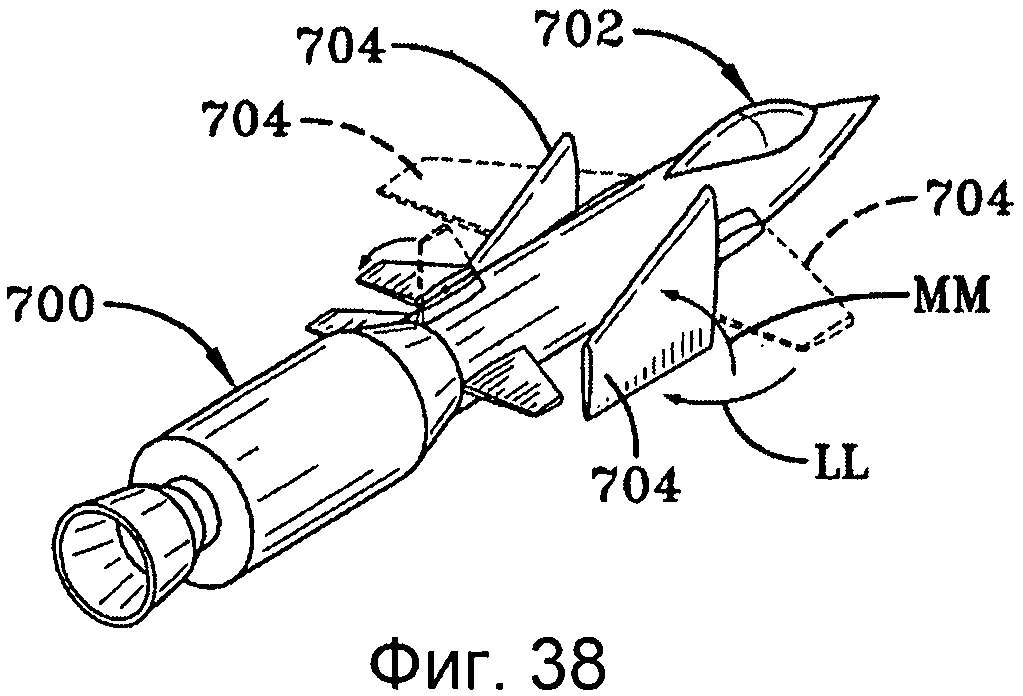
На фиг.37 и 38 показаны аэрокосмические варианты аппаратов с возможностью возврата в атмосферу ракетных систем, установленных сверху на ракетах, один - с выступающими крыльями, а другой - с крыльями, сложенными для транспортировки внутри тележки согласно предпочтительному варианту осуществления изобретения.
На фиг.38А приведено наглядное представление аэрокосмического аппарата с несущим корпусом со сложенными подъемными и управляющими конструкциями с предпочтительным вариантом осуществления изобретения.
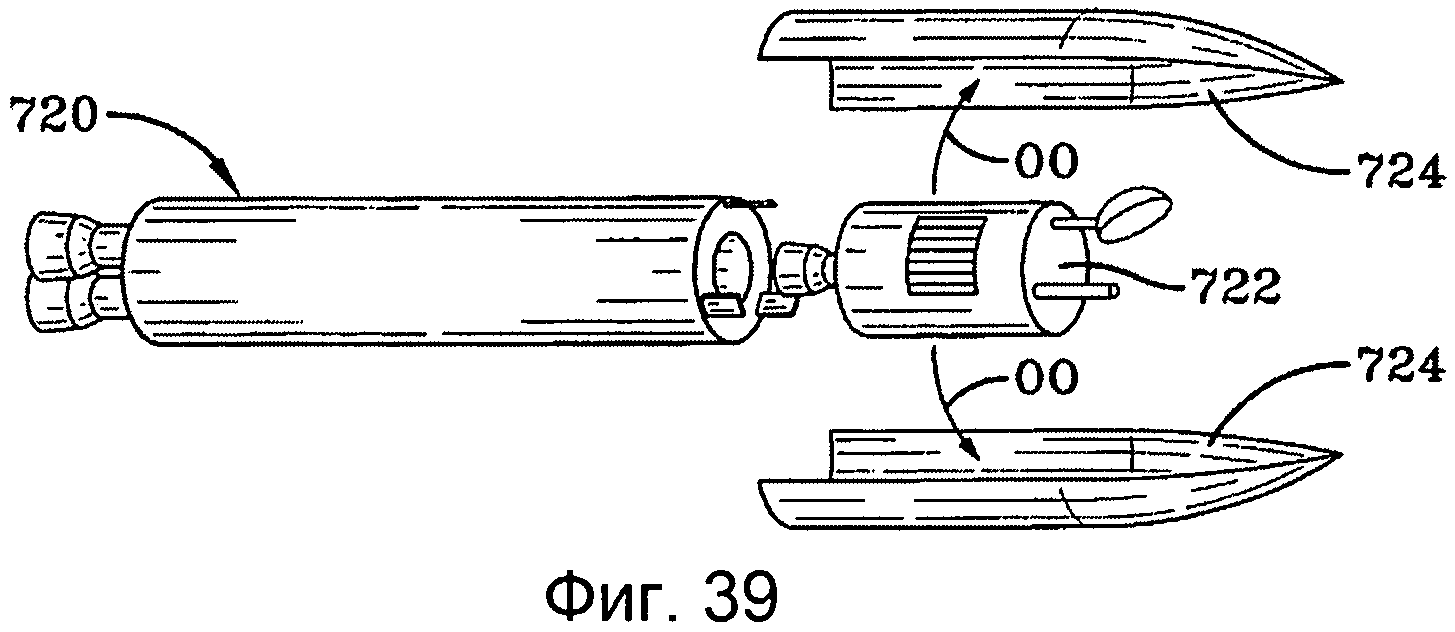
На фиг.39 приведен схематический вид спутника или другой полезной нагрузки, переносимой на ракете, согласно части предпочтительного варианта осуществления изобретения со сбрасываемыми, аэродинамическими, защитными оболочками.
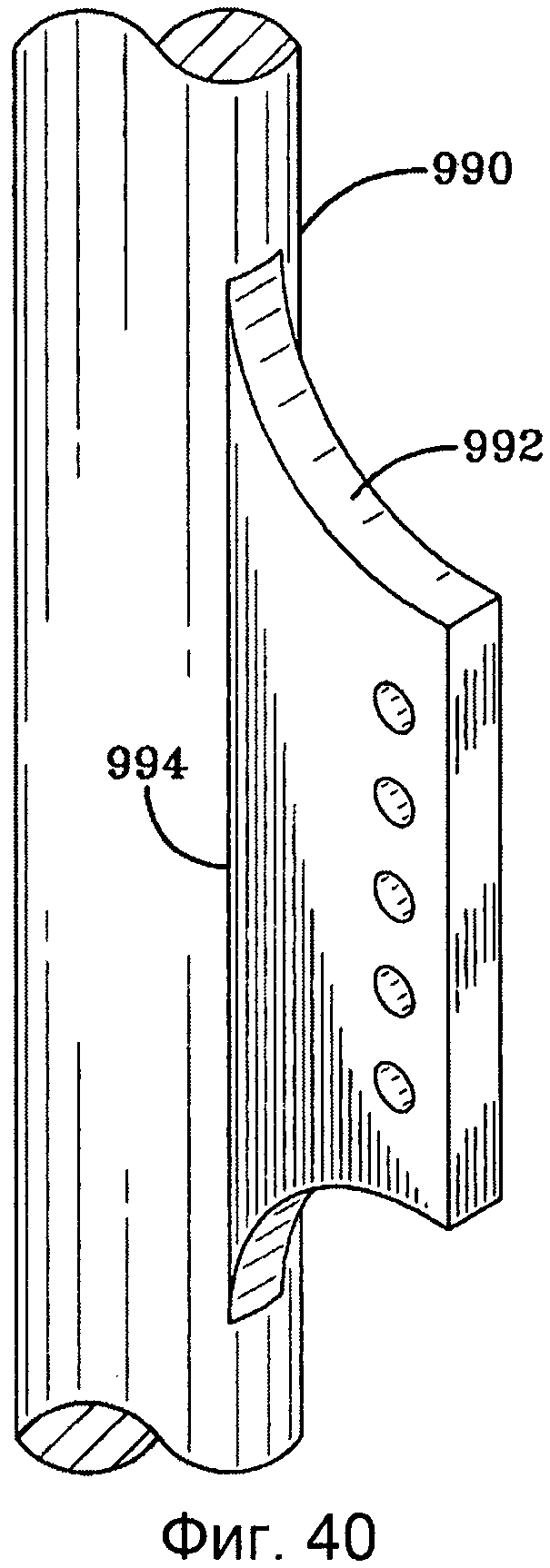
На фиг.40 и 41 показан перспективный вид и вид в разрезе стержня в виде типа троса, который будет использоваться вместо проволочного троса.
ДЕТАЛЬНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Предпочтительный вариант осуществления изобретения первоначально описан в общих чертах со ссылкой на некоторые компоненты, более детально описанные ниже. Общие компоненты показаны в общих чертах на фиг.1, 1А и 1В. Предпочтительный вариант осуществления - это система пуска ракет 1, включающая аппарат для перемещения запускаемой ракеты 18. Ракета 18 находится либо в контейнере, либо в устройстве транспортировки ракеты, таком как тележка 20, либо загружается в тележку 20 со стеллажей для хранения 7. В тележках 20 имеются цилиндрические продольные отверстия в открытых непрерывных стойких к давлению и температуре трубах 836 (фиг.13, 13С), которые расположены и удерживаются на месте для приема ракеты 18. Тележки 20 являются герметичными и имеют продольную ось, которая также является продольной осью трубы 836. Ракеты 18, их компоненты и тележки 20, которые могут быть загружены или не загружены ракетами 18, перемещаются на стеллажи для хранения 7 при помощи соответствующего транспортировочного рельсового вагона по пути 3 к зоне разгрузки 5. Кран 48 переносит соответственно ракеты 18, и/или тележка 20 и/или компонент ракеты 18 перемещается или используется для удержания различных частей системы пуска ракет 1 на относительно узких подкрановых колей 78. Ракеты 18 могут иметь оперение 21 (фиг.7), а каждая тележка 20 имеет внутренние опоры в дополнение к трубе 836.
Поперечный загрузчик 50 перемещается по колеям 90 в направлениях, показанных стрелками A на фиг.1А, при этом колеи 90 расположены дальше друг от друга, чем крановые колеи 78. Поперечный загрузчик 50, который предпочтительно используется для перемещения ракет 18, тележек 20 и т.п. со стеллажей для хранения 7 на отсеки сборки или заправки 10, включает вагонетки 92.для перемещения по колеям 90, и имеет колесную вагонетку 98, перемещаемую по паре поперечных параллельных рельсов 97 сверху на балках 96, и подъемный агрегат 100, присоединенный к колесной вагонетке 98. Кран 48, который предпочтительно используется для выполнения технического обслуживания системы пуска, может также использоваться для снятия ракет 18 и/или тележек 20 и т.п. со стеллажей для хранения 7, а также для переноса ракет 18 и/или тележек 20 в отсеки сборки/заправки 10 (обычно должно быть большое количество отсеков сборки 10). Подъемный агрегат 100 перемещается по рельсам 97 в направлении, показанном стрелками В. Тележка 20, которая может быть загружена или не загружена ракетой 18 тем или иным способом, помещается в отсек сборки 10. Работа всей системы находится под управлением соответствующего управляющего оборудования локального управления пуском или бункера управления системами 120.
Согласно фиг.1А и 2 боковое транспортировочное устройство 46 перемещает тележку 20 с загруженной на нее ракетой 18 вдоль ряда колей 17, расположенных на путях ниже уровня земли 14 и 14А, находящихся между вертикальными стенками 16. Путь 14А (также показанный на фиг.5) ведет к замкнутой дорожке 15, на которой также имеются колеи 17. Боковые транспортировочные устройства 46 двигаются в направлении, показанном стрелками C. Боковое транспортировочное устройство 46 перевозит тележку 20 с ракетой 18 на пусковую установку 119, включающую подъемный агрегат 60. Подъемный агрегат 60, показанный на фиг.8 и 9, включает верхний поворотный механизм 61. Тележка 20 поднимается на механизм поворотной платформы 63 над уровнем земли. Механизм поворотной платформы 63 включает основание поворотной платформы 122 и башенный блок 123 (фиг.8, 10, 11). Башенный блок 123 включает поворотную платформу 72, нижнюю направляющую трубу 124 и вторичную направляющую конструкцию 125, при этом последняя функционально связана с рядом основных силовых кабелей и транспортировочных тросов 27.
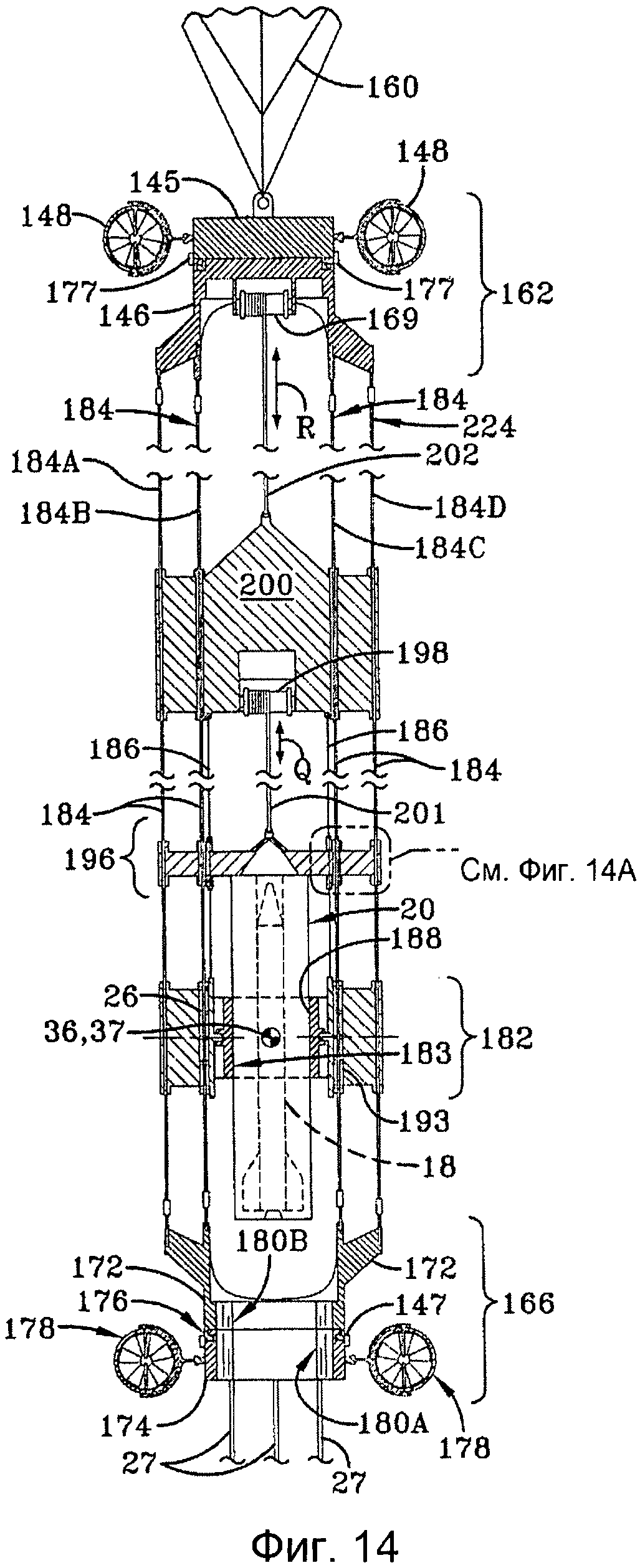
Основные кабели 27 - это поставщики электрической энергии для загружаемых ракетами тележек 20, которые по ним транспортируются. Электрическая энергия может обеспечиваться одним набором электропроводных кабелей, а тележки 20 могут транспортироваться вторым набором прочных транспортировочных тросов. Однако линии электропитания и линии транспортировки ракет были объединены в один набор основных силовых кабелей и транспортировочных тросов, которые действуют одновременно как переносчики электрической энергии и средства опоры ракет (предпочтительно на тележках на большую высоту и с большой высоты). Основные кабели/тросы 27 имеют нижний концевой участок на вторичной направляющей конструкции 125 или возле нее либо механизм поворотной платформы 63, а также верхний концевой участок, который во время использования находится на больших высотах. Указанных основных силовых кабелей и транспортировочных основных кабелей 27 предпочтительно должно быть три для передачи трехфазного электропитания. Основные кабели/тросы 27, показанные на фиг.1, 1В, 11, 12, 13 и 14, присоединяются к стыковочной станции 166, от которой идет набор вторичных кабелей/тросов 184. Кабели/тросы 184 функционально направляют агрегат подъемного кольца 182, который настраивается на нужную высоту над стыковочной станцией 166 после регулировки предварительно выбранного пускового азимутального угла, когда тележка 20 находится в блоке подъемного кольца 182 и верхней кольцевой части 172 стыковочной станции 166. После подъема из зацепления с верхней кольцевой части 172 и отпускания от концевого захвата тележки 196, блок подъемного кольца 182 настраивается на предварительно выбранный пусковой угол места. Блок подъемного кольца 182 расположен над стыковочной станцией 166 и находится на значительных высотах для выполнения последнего шага пуска ракет 18, как описывается ниже.
Кабели/тросы 27, 184 и любые другие кабели/тросы поддерживаются в верхних слоях атмосферы рядом аэростатов 164 и 160, состоящие из оболочки, удерживающей газ легче воздуха. Указанные аэростаты 164 присоединяются к указанным основным кабелям/тросам 27 с перерывами по длине указанных основных кабелей/тросов 27 для совокупного удержания собственного веса указанного набора основных кабелей/тросов 27, а также конструкции, переносимой указанными основными кабелями/тросами 27. Аэростаты 160 поддерживают иначе неподдерживаемую часть кабелей/тросов 27, а также любые присоединенные к ним конструкции, все конструкции и сборки от стыковочной станции 166 до указанных аэростатов 160, а также натягивают кабели/тросы 27 и 184 так, чтобы они могли нести полезную нагрузку. Кабели/тросы 27 отделяются друг от друга рядом разделителей и блоков стабилизации 158. (В большей части предыдущего описания кабели/тросы показаны в виде проволочных канатов, однако они могут быть и стержнями, как объясняется ниже).
Каждая собранная ракета 18 на тележке 20 транспортируется от отсека сборки 10 в нижнюю направляющую трубу 124, затем во вторичную направляющую конструкцию 125, а оттуда - в стыковочную станцию 166 при помощи фрикционных приводов 26, которые включают электрический аппарат питания 168. Фрикционные приводы 26 могут включать набор колес фрикционного привода 26А, присоединенные к аппарату для преобразования электрической энергии в механическую энергию и для взаимного соединения механического и электрического аппаратов. Таким образом, набор зубчатых колес в редукторе G может быть функционально соединен к электрическому аппарату питания 168. Последний может включать двигатель-генератор M-G, функционально соединенный с зубчатыми колесами в редукторе G, как показано на фиг.9С, 15С и 25. Фрикционные приводы 26 встроены в тележку 20. Тележка 20 перемещается вдоль, а электрический аппарат питания 168 получает энергию от основных кабелей/тросов 27, как когда тележка 20 поднимается (или взбирается) по кабелям/тросам 27, и по другим кабелям/тросам, присоединенным к ним, как описано ниже, при помощи фрикционных приводов 26. Собственный вес кабелей/тросов 27 и все стационарно прикрепленные к указанным кабелям/тросам элементы периодически компенсируются аэростатами 164 и удерживаются натянутыми аэростатами 160. Колеса фрикционных приводов 26А и электрический аппарат питания 168 (включает зубчатые колеса в редукторе G, связанные с двигателем-генератором M-G) преобразуют электрическую энергию в кинетическую энергию для питания электрического аппарата питания 168. Желательно, чтобы последний был реверсивным электрическим аппаратом питания для преобразования потенциальной энергии в электрическую энергию при опускании тележки 20, и передачи электрической энергии на лини электропередач, являющиеся частью кабелей/тросов, по котором перемещается тележка 20. Если тележке 20 требуется электрическая энергия для поднятия, колеса 26А приводятся в действие двигателем-генератором M-G через преобразовательный аппарат, такой как набор зубчатых колес в редукторе G, которые вращаются в ответ на получение питания с двигателя-генератора M-G. Когда тележка 20 опускается под действием силы тяжести, фрикционные приводы 26 действуют в качестве рекуперационных тормозов и воздействуют на зубчатые колеса в редукторе G (или любое другое устройство для преобразования механической энергии в электрическую энергию). Аэростаты 160 и 164 предпочтительно имеют наклонные стороны, как показанные на фиг.1, 11, 20А и 28; цилиндрические стороны, как показано на фиг.20В, либо могут быть сферическими, а также иметь другие формы. Высотные аэростаты хорошо известны, постоянно развиваются и улучшаются. Соответствующие аэростаты 160 и 164 предпочтительно должны оставаться работоспособными в приложениях по настоящему изобретению многие месяцы, а оптимально - годы. Аэростаты для перемещения в стратосферу известны и используются с 1950-х. Тележка 20 поднимается дальше по вторичным кабелям/тросам 184 и вращается, а затем наклоняется на предварительно заданную величину, как описано ниже, после чего происходит пуск ракеты 18.
Приведенное выше описание содержит обзор компонентов предпочтительного варианта осуществления изобретения. Ниже приведено более детальное описание изобретения в предпочтительных формах его воплощения.
Ракеты 18 и их соответствующая полезная нагрузка собираются, загружаются на тележки 20, заправляются при необходимости и хранятся во взрывобезопасных отсеках сборки 10 перед пуском. Каждый отсек 10 находится ниже поверхности земли и сконструирован так, чтобы ограничить повреждение в случае случайной детонации топлива ракеты 18. Каждый отсек 10 имеет обращенную поверхность в форме обращенного усеченного конуса 12, показанного на фиг.2 и 11, выполненного из соответствующего железобетонного или подобного материала для ограничения последствий любого взрыва путем отражения его вверх и вбок. Каждый отсек 10 соединен при помощи пути ниже уровня земли 14 и 14А к замкнутому пути 15. Путь 14 заканчивается наклоненным открытым желобом 86 (фиг.6) с откосной вертикальной стеной 16А (фиг.2), обращенной к боковому отверстию отсека сборки 10. Это отражает любые боковые компоненты возможного взрыва от отсека 10 вверх и в сторону от опорного аппарата (конструкций, оборудования) для системы пуска 1 и от персонала. Затем путь 14 поворачивается примерно на 90 градусов для соединения с путем 14А. Каждый отсек 10 может удерживать ракету 18 внутри тележки 20. Каждая ракета 18 может включать двигатель кратковременного ракетного ускорителя для выброса ракеты 18 из открытой непрерывной трубы 836 (фиг.13А) на тележке 20 с такой скоростью, чтобы, даже если основной ракетный двигатель пропустит зажигание, кратковременный бустерный двигатель ракеты и ракета 18 не упадут и не повредят систему пуска ракет 1. Бустерный ракетный двигатель будет работать только в стойких к температуре и давлению пределах контейнера, в которых он удерживается, как описано ниже. Каждая ракета 18 имеет один или несколько двигателей для выведения ракеты 18 на расчетную скорость.
Каждая тележка 20 имеет противоположные концевые отверстия 24 (фиг.9С, 13, 13А) и шарнирные концевые крышки или отводные мембраны 30 (фиг.9С, 13, 13А) на его обоих концах для защиты ракеты 18 на тележке 20, когда тележка 20 перемещается с земли через атмосферу. Эти крышки 30 могут качаться для открытия обоих концов тележки 20 или мембран 30, отводимые, чтобы аналогичным образом открыть оба конца тележки 20, как показано на фиг.13А. На противоположных концевых отверстиях 24 также находятся реверсивные толкатели с переменным шагом 31, подвешенные на шарнирах параллельно одной стороне тележки 20 так, чтобы их можно было вращать в положение, перпендикулярное концам при помощи приводных механизмов 29 (фиг.13В, 13С). Каждая тележка 20 имеет кратное трем количество фрикционных приводов 26 (фиг.9С), установленных на равном расстоянии по периметру тележки 20, для захвата и перетаскивания тележки 20 вверх по находящимся на равном расстоянии силовым кабелям 27. Кабели/тросы 27 и 184 имеют подходящие высокие показатели предела прочности на разрыв и проводимость, как описано ниже. Фрикционные приводы 26 запитываются от описанных выше трех установленных на равном расстоянии друг от друга силовых кабелей 27, причем эти кабели 27 переносят трехфазное питание, от которых фрикционные приводы 26 получают питание. Фрикционные приводы 26 являются реверсивными, используют электропитание для подъема тележки 20 или генерируют электрическую энергию при использовании в качестве рекуперативных тормозов. Фрикционные приводы 26, работающие в рекуперативном тормозном режиме, преобразуют потенциальную энергию тележки 20 при ее опускании в электричество, подаваемое обратно на кабели 27, при этом рекуперированное электричество может использоваться, чтобы помочь поднять другие загруженные тележки в прилегающих системах пуска 1. Фрикционные приводы 386 (фиг.28) и 26 (фиг.9С) работают аналогичным образом. Внутренняя часть тележки 20 имеет конструкцию, способную выдерживать тепло и последствия взрыва, вызванные работой кратковременного бустерного ракетного двигателя. Концевые крышки или мембраны 30 (детально показанные на фиг.9С и 13А) защищают ракету 18, удерживаемую на тележке 20, от любых неблагоприятных погодных условий, и могут использоваться для удержания инертных или относительно инертных газов внутри тележки 20, окружающей ракету 18, такие как азот, чтобы ингибировать горение любых реактивных материалов, выходящих из ракеты 18 во время транспортировки на высокую позиции пуска. Верхний конец тележки 20 может иметь блокировочное гнездо для торсионного пальца 32 (фиг.13А), подобное гнездам частичных вращающихся торсионных пальцев 154 (фиг.9) (описываются ниже) для приема торсионных пальцев 204 (фиг.12 и 13), подобных частичному вращающемуся торсионному пальцу 144 (фиг.9) (также описывается ниже), которые используются для подъема тележек 20 при подготовке к процессу пуска ракеты, описанному ниже.
Каждая тележка 20 имеет внутренние отводные кронштейны 34 или 35 (фиг.26, 27), которые надежно удерживают ракету на тележке 20, так что центры тяжести 36 и 37 (фиг.13) тележки 20 и ракеты 18 соответственно стабильно лежат в центре тележки 20 в ее центре тяжести. Небольшие эластомерные или пневматические колеса 372 (фиг.27) могут присоединяться к периметру ракеты, чтобы избежать фрикционного контакта между ракетой и внутренней частью тележки 20 во время выброса, если вектор силы тяги ракеты не проходит точно через центр тяжести ракеты. Отводные кронштейны 35 и связанные части описываются ниже.
Согласно фиг.3-6 существуют различные способы погрузки ракет 18 на тележки 20. В одном из вариантов ракета 18 первоначально собирается горизонтально, вставляется в тележку 20 и первоначально помещается на колесный загрузчик 38 (фиг.3) в направлении, показанном стрелкой D. Тележку 20 затем помещают на гидравлический вращатель 39; вращатель 39, имеющий гидравлически или иначе вращающееся опорное основание 40, установленное между стойками 41 для вращения на пальцах 42 при помощи, например, гидравлического исполнительного механизма 43 (или другого подходящего исполнительного механизма). Поршневой шток гидравлического исполнительного механизма 43 практически полностью отводится внутрь цилиндра с момента, когда цилиндр 20 только прошел над поршнем и цилиндром. В каждом из четырех углов основания 40 предусмотрены противовесы 44, чтобы центр тяжести основания 40 совпадал и с осью вращения пальцев 42 и центром тяжести сборки ракеты 18 и тележки 20, тем самым снижая усилие срабатывания, которое оказывает гидравлический исполнительный механизм 43 или другое средство вращения. Ракеты 18 могут быть предварительно помещены на горизонтально ориентированные тележки 20.боковых транспортировочных устройств 46 (или подобных транспортеров) перед вращением в вертикальное положение гидравлическими вращателями 39, либо же ракеты 18 могут быть помещены в вертикальные тележки 20, предварительно расположенные на боковых транспортировочных устройствах 46 в отсеках сборки 10 при помощи переносного загрузчика 50. Согласно фиг.6 для переноса пустых тележек 20 на предварительно установленные боковые транспортировочные устройства 46 (как объяснено ниже) отсеков сборки 10 могут использоваться поперечный загрузчик 50 или кран 48, после чего загрузчик 50 или кран 48 погружают ракету 18 на тележку 20.
Боковые транспортировочные устройства 46 показаны на фиг.1-6, 8, 9 и 10. Боковые транспортировочные устройства 46 перемещаются вдоль путей 14, 14А и дорожки 15 на колеях 17. Дорожка 15 образует замкнутый контур, проходящий под находящимся над уровнем земли механизмом поворотной платформы 63 (фиг.1А, 8, 10, 11, описывается ниже), по которой перемещаются тележки 20, на каждую из которых погружается ракета 18, из взрывобезопасных отсеков сборки 10 к подъемному агрегату 60, как показано на фиг.2 и 8, а также перемещаются пустые тележки 20. Каждое боковое транспортировочное устройство 46 имеет платформу 54 (фиг.9) обычно с треугольной выемкой 56 (фиг.2, 4) для вставки конца тележки 20, чтобы тележка 20 находилась в вертикальном положении, а верхние края тележки 20 входили в выемку 56. Показано боковое транспортировочное устройство 46, имеющее независимо управляемые колеса 58 (фиг.9) для перемещения бокового транспортировочного устройства 46 на колеях 17, а также имеет соответствующий рулевой механизм, чтобы боковое транспортировочное устройство 46 могло перемещаться вдоль пути 14 и 14А, а также дорожки 15. Для блокировки тележки 20 в выемке 56 на платформе 54 предусмотрен соответствующий блокирующий механизм, которым могут быть конусообразные центрирующие штифты 142 (фиг.9, описываются ниже) и частичные вращающиеся торсионные пальцы 144 (фиг.9, описываются ниже). В боковых транспортировочных устройствах 46 также имеются подобные гнезда, которые есть на дне тележек 20, для вставки центрирующих пальцев и частичных вращающихся торсионных пальцев 144, как объясняется ниже, для разъемных крепежных приспособлений 46 к верхнему поворотному механизму 61. который, как указывалось выше, является частью подъемного агрегата 60, который будет описан ниже.
Вдоль части дорожки 15 на стеллажах для хранения 7, разделенных стенками 64, хранится ряд ракет 18 и их варианты, прочие предметы, такие как боковые транспортировочные устройства 46, тележки 20 и варианты, такие как герметизированные туристические тележки и тележки обслуживания системы пуска. Ракеты 18, если в них не используется твердое топливо, могут заправляться во время хранения на стеллажах 7 или предпочтительно в отсеках сборки 10 с использованием различных комбинаций ракетного топлива, такого как жидкостно-жидкостное или жидкостно-твердое топливо, в зависимости от типа ракет 18. Одной из комбинаций топлива с высоким удельным импульсом является жидкий кислород (LOX) и жидкий водород (LH2), которые могут храниться в баках-хранилищах 65 и 66 соответственно, как показано на фиг.5.
Топливная комбинация может создаваться самым экологически чистым способом с использованием системы, в которой одна или несколько гидротурбин передают механическую энергию, а возможно другие гидротурбины приводят в действие электрические генераторы 62, входящие в состав силовой установки 468. Гидротурбина(ы) получает(ют) воду из соответствующего источника, такого как река, под достаточным давлением и с достаточным массовым расходом, для питания электрической подстанции 70 от спаренных электрических генераторов 62. и непосредственно приводят в действие компрессоры в установках сжижения газов, таких как субустановка электролиза воды и сжижения газов в установке 74. Электроэнергия от подстанции 70 может использоваться для работы субустановки электролиза воды в установке 74 и может использоваться для обеспечения вспомогательного питания для субустановки сжижения газа, управляемой гидротурбиной, в установке 74 для сжижения получаемого в результате кислорода (O2) и водорода (Н2), которые хранятся соответственно в баке-хранилище LOX 65 и баке-хранилище LH2 66, кроме того, электроэнергия используется для питания всех остальных частей пусковой системы 1 и его поддерживающей аппаратуры, требующей такой энергии. В качестве альтернативы могут использоваться другие источники энергии, такие как ядерное деление, если недоступна гидроэлектрическая энергия и энергия, получаемая от гидротурбины. Предпочтительным является использование возобновляемых источников энергии, таких как геотермальный, гидроэлектрический и солнечный.
Как объяснялось ранее, ракеты 18 транспортируются на земле на тележках 20. Боковые транспортировочные устройства 46 могут перемещаться вдоль путей 14 и 14А, а также дорожки 15 на относительно узких параллельных рельсах 17 (по сравнению с колеями 90, которые будут описаны ниже). Пустая тележка 20 на стеллаже для хранения 7 показана на фиг.5 и 6 возле пустого бокового транспортировочного устройства 46. На фиг.5 также показан вариант герметичной туристической тележки, вариант средства обслуживающей тележки, тележки с запасным аэростатом или воздушно-космического самолета для космического туризма 76. Колеи 78 и пара колей 90 (описываются ниже) (фиг.5 и 6), идущие параллельно прямым противоположным частям пути 15, используются для перемещения крана 48 и колесного переносного загрузчика 50. Пустые тележки 20 показаны сверху на боковых транспортировочных устройствах 46, перемещающихся вдоль дорожки 15, с которой они могут быть сняты для ремонта или повторной загрузки.
Система загрузки более детально показана на фиг.6. На стеллажах для хранения 7 находятся либо укомплектованные ракеты 18 и/или компоненты ракеты 18, показанные как части ракеты 18А, 18В и 18С, и/или воздушно-космический самолет для космического туризма 76 (фиг.5) и/или пустые тележки 20 или запасные боковые транспортировочные устройства 46. Части ракет 18А-18С могут комбинироваться для получения окончательной ракеты 18, но это не ограничивает изобретения. Ракеты 18 с соответствующими частями ракет 18А-18С, направляются на свои соответствующие позиции при помощи рельсового пути 3 (см. фиг.1), при этом ракеты 18, части ракет и т.п. могут поступать из удаленных производственных предприятий по всему миру. Тележка 20 и боковое транспортировочное устройство 46 также показаны на стеллажах 7. Кран 48 может перемещаться на рельсах 78 для сборки частей ракет 18А-18С в отсеке внутри стеллажей для хранения 7, а затем в одну из тележек 20. Кран 48 также может использоваться для обслуживания путей 14 и 14А, а также дорожки 15. Кран 48 имеет трос 49. Кран 48 при помощи троса 49 и соответствующего подъемного механизма может поднимать собранную ракету 18 и переносить ее в отсек 10 (левая часть фиг.6) для вставки в предварительно размещенную тележку 20 сверху на боковое транспортировочное устройство 46. Кран 48 нужен в дополнение к другому вышеуказанному обслуживающему оборудованию для обслуживания колей 17, 78 и 90, а также рельсов 97 (описываемых ниже). Необходимо соблюдать осторожность при использовании крана 48 для переноса ракет 18, потому что трос крана 49 может раскачиваться во время перемещения, что может привести к повреждению ракеты, подвешенной на тросе 49.
Как объясняется ниже, всегда существует опасность случайной детонации ракеты 18 в отсеке 10 при использовании высокореактивных комбинаций топливного окислителя. Для защиты различных конструкций, оборудования и персонала от последствий взрыва, таких как детонация, с противоположных краев отсека 10 размещается пара параллельных, инвертированных Г-образных направляющих 80 (фиг.6). Каждая пара направляющих 80 имеет пламеотражатель 82, выдвигаемый в направлении, показанном стрелками E, при этом пламеотражатель 82 скользит под перекрывающимися фланцами 84 направляющих 80 перед заправкой. Пламеотражатель 82 после размещения под фланцами 84 нельзя сдвинуть даже при взрыве. Пламеотражатели 82 сделаны из такого материала, который не разрушается, даже если он должен выдерживать взрыв внутри отсека 10 во время сборки, заправки или прочих действий, при этом взрыв направляется прочь от критически важных компонентов при помощи желоба 86.
Поперечный загрузчик 50, показанный на фиг.1 и 6, является частью системы загрузки ракет 88, включающей пару широких колей 90 (шире колей 78 для крана 48), на которых перемещается пара колесных вагонеток 92. Блок направляющих 94, включающий балки 96 и колесные вагонетки 92, идет через широкие колеи 90 и перемещается на вагонетках 92, которые двигаются по широким колеям 90. Блок направляющих 94 имеет параллельные рельсы 97, показанные на фиг.7 сверху на балках 96, по которым движется подъемный агрегат 100. Весь блок поперечного загрузчика 50 сверху на рельсах 90 подобен проходящему сверху двухбалочному мостовому крану с концевыми вагонетками. Параллельные направляющие балки 96 прикреплены к вагонеткам 92. Колесная вагонетка 98 перемещается по параллельным рельсам 97, как показано на фиг.1, 1А, 6 и 7. Переносной загрузчик 50 включает подъемный агрегат 100, показанный на фиг.7, с держателем направляющей 101 и подъемником 102, который может перемещаться вверх и вниз, как показано стрелкой F на держателе 101, при помощи подходящих электромеханических средств, предпочтительно с противовесом. Переносной загрузчик 50 снимает ракеты 18 либо пустые тележки 20 или их варианты, либо тележки 20, удерживающие различные типы ракет 18 или различные компоненты со стеллажей для хранения 7, в отсеки сборки 10, с которых боковые переносные устройства 46 транспортируют заправленные ракеты 18 на тележках 20 или других вариантах тележек на пусковую установку 119.
Также со ссылкой на фиг.7 показан еще один вариант осуществления деталей верхней части поперечного загрузчика 50 в слегка измененной форме. Как указывалось выше, поперечный загрузчик 50 имеет подъемный агрегат 100 с держателем направляющих 101, в котором находится подъемник 102. Держатель 101 показан с противоположными выступающими частями 103, позволяющими присоединить держатель 101 к колесной вагонетке 98 для перемещения подъемного агрегата 100 по рельсам 97 вверх по балкам 96. Для зацепления ракеты 18 для подъема подъемный агрегат 100 имеет зависимые ножки 105, как минимум три (предпочтительно) для устойчивости, которые присоединены к корпусу 106, прикрепленному к нижней части подъемника 102, что позволяет опустить захватный блок 104 в отсек сборки 10, как показано стрелкой G. Ножки 105 могут перемещаться радиально в направляющих 110 (как показано стрелками Н на фиг.7А) по отношению к ракете 18, находящейся между ножками 105, чтобы можно было устанавливать ракеты различного диаметра. Частичный вращающийся торсионный палец 111 или другое средство крепления к ракете 18, расположен на свободном конце каждой ножки 105, а верхняя часть ракеты 18 имеет расположенные на равном расстоянии друг от друга гнезда для частичных вращающихся торсионных пальцев 109 или другие гнезда для других средств крепления для вставки соответствующих частичных вращающихся торсионных пальцев 111, чтобы обеспечить надежное крепление ракеты 18 на подъемном агрегате 100. Гнезда пальцев 109 расположены в носовой части 19 ракеты 18, обычно параллельно продольной оси ракеты 18. Гнезда пальцев 109 могут иметь крышки доступа 113, присоединенные к носу 19 ракеты 18, однако могут извлекаться из соответствующих гнезд 109 при необходимости обеспечения доступа к гнезду 109, а также имеют гладкую поверхность для ракеты 18, когда гнезда пальцев 109 не используются, чтобы снизить аэродинамическое сопротивление, когда ракета находится в полете.
Верхний и нижний блоки стабилизирующих кронштейнов 114 могут быть предусмотрены для стабилизации ракеты 18 во время бокового перемещения, удерживаемой подъемным агрегатом 100 при движении вдоль колей 90 и рельсов 97. Каждый блок стабилизирующих кронштейнов 114 имеет гидравлический или другой исполнительный механизм 115, к которому крепится кронштейн 116 каждого блока кронштейнов 114. Кронштейны 116 могут вращаться вдоль путей, показанных стрелками I. На свободном конце каждого кронштейна 116 предусмотрена проушина 117 для вставки в соответствующую выемку 118 в ракете 18 для приема каждой проушины 117.
Как описывалось ранее, на фиг.6 показано боковое транспортировочное устройство 46 с загруженной тележкой 20, удерживающей ракету 18, перемещающуюся по дорожке 15 в направлении пусковой установки 119, которая описывается ниже. Другое боковое транспортировочное устройство 46, которое переносит пустую тележку 20, перемещается от пусковой установки 119, которая отправила ракету 18 с тележки 20 на большой высоте, двигается по дорожке 15, возвращая незанятый отсек сборки 10 для повторной загрузки ракеты 18 или возвращая на стеллаж для хранения 7 для обслуживания в случае необходимости.
Ссылаясь снова на фиг.5, система пуска ракет 1 дополнительно включает пусковую установку 119. Бункер локального управления пуском 120 управляет работой системы пуска ракет 1, направляя потоки электрической энергии к прилежащим пусковым системам 1 и от них от источников энергии, таких как силовая установка 468, или других прилежащих систем пуска ракет 1, и включает компьютерные системы управления и контроля, использует данные с различных устройств измерения и визуализации, расположенных в различных местах пусковой системы 1. Именно здесь обычно располагается персонал для локального управления системой пуска ракет 1 и координирования пусков с других частей группы пусковых систем для минимизации расхода энергии.
Подъемный агрегат 60 располагается под землей, как показано на фиг.2, 8 и 9. Подъемный агрегат 60 может иметь подъемный механизм, такой как гидравлический поршневой шток 68, на который садится верхний поворотный блок 61 (фиг.9) для вращения при помощи поворотного привода 134 тележки 20 с ракетой 18 на ней, погруженной на боковое транспортировочное устройство 46 в направлении, показанном стрелкой J. Подъемная система 60, описанная более подробно ниже со ссылкой на фиг.8, включает шток 68, имеющий широкое, невращающееся нижнее основание 135, прикрепленное к штоку 68, установленное для удержания верхнего поворотного блока 61. Верхний поворотный блок 61 состоит из вращающегося опорного основания 136 (с участком стола 141), установленного сверху на невращающемся нижнем основании 135 (которое не является частью механизма поворотной платформы 63).
Посмотрим на фиг.8 и 9. Поршневой шток 68 является частью поршня 67, выходящего из гидравлического цилиндра 69. Гидравлический цилиндр 69, поршень 67 и шток 68 не вращаются.
Вышеуказанная гидравлическая система не является единственным вариантом приведения в действие подъемного механизма. Электромеханическая система может образовывать подъемный механизм.
Если перейти теперь к фиг.10, механизм поворотной платформы 63 является надземной частью пусковой установки ракет 119 для приема загружаемых ракетами тележек 20 с подъемного агрегата 60, и показана их ориентация для транспортировки. Перемещение загруженной ракетой тележки 20 вверх показано стрелкой L. Как указывалось выше, механизм поворотной платформы 63 включает основание поворотной платформы 122 и башенный блок 123. Основание поворотной платформы 122 крепится к земле.
Поворотная платформа 72 может быть достаточно тяжелой, весить несколько тонн и опираться на конструкцию, способную выдерживать такой большой вес, выдерживать подъемные и боковые силы, а также плавно вращаться. Детали подходящего опорного устройства поворотной платформы показаны на фиг.8А.
На фиг.8А показано основание поворотной платформы 122, имеющее горизонтальную поверхность основания захвата колес 270 для зацепления колесами 284, вертикальную трубчатую часть 272, горизонтальный, кольцевой фланец 274, идущий наружу в направлении внешней окружности основания поворотной платформы 122. Поворотная платформа 72 имеет идущую вниз трубчатую часть 276 по периметру поворотной платформы 72, от которой идет направленный внутрь горизонтальный кольцевой фланец 278, имеющий ряд держателей осей колес 280, 281 и 282, идущих в направлении основания зацепления колес 270, вертикальной трубчатой части 272 и горизонтального кольцевого фланца 274 соответственно. Каждый держатель оси 280, 281 и 282 соответственно удерживает оси колес 284, 286 и 288 соответственно. Колеса 284, 286 и 288 перемещаются по поверхности основания зацепления колес 270, вертикальной трубчатой части 272 и горизонтального кольцевого фланца 274, чтобы обеспечить плавное круговое вращение поворотной платформы 72, показанной на фиг.8 стрелкой K. В качестве альтернативы (см. фиг.8В) основание поворотной платформы 122, может иметь горизонтальное опорное основание 290, вертикальную трубчатую часть 291 и горизонтальный кольцевой фланец 292. Аналогичным образом, поворотная платформа 72 в качестве альтернативы может иметь идущую вниз трубчатую часть 293 и идущий внутрь горизонтальный кольцевой фланец 294. Между горизонтальным кольцевым фланцем 294, а также опорным основанием 290 и горизонтальным кольцевым фланцем 292 располагается ряд подшипников качения, таких как шарики шарикоподшипников или перекрещивающиеся ролики 295, кроме того, используются соответствующие кольцевые опорные поверхности, такие как канавки 296, чтобы обеспечить вращение поворотной платформы 72 со сниженным трением по сравнению со случаем, когда подшипники не используются.
Поворотная платформа 72 в зависимости от размера тележки 20 может иметь диаметр около 46 футов. Например, если трубчатая внутренняя часть тележки 20 для удержания ракеты 18 имеет радиус 8 футов, а минимальная толщина тележки 20, удерживающей ракету, составляет 2 фута, с зазором расположенной по центру тележки 20 размером 3 фута, диаметр поворотной платформы 72 составит около 46 футов.
Для достаточно скромного диаметра внутренней трубчатой части тележки 20 для удерживания ракеты 18 размером 16 футов, внутренний диаметр тележки плюс скромный (∆=2 фута) зазор для конструкции тележки 20 и допуск 3 фута (δ=3 фута), чтобы механизм обеспечил вращение поворотной платформы 72, диаметр поворотной платформы 72 составляет около 46 футов, а плоская сторона 22 тележки 20 составляет около 34,6 футов.
Башенный блок 123 расположен на уровне земли, над опорным основанием 136 (фиг.8), опирается на основание поворотной платформы 122 и ограничивается им. Вертикальная ось вращения башенного блока 123 совпадает с осью подъемного агрегата 60. Нижняя направляющая труба 124 имеет отверстие 71 для приема загруженной ракетой тележки 20 из бокового переносного устройства 46 через отверстие 73, показанное на фиг.10, через поворотную платформу 72 и основание поворотной платформы 122 при помощи подъемного агрегата 60. Вращающееся опорное основание 136 (фиг.8, 9) имеет конусообразные центрирующие штифты 142 и частичные вращающиеся торсионные пальцы 144 для блокировки с возможностью отпускания бокового транспортировочного устройства 46 с тележкой 20 на нем к опорному основанию 136. Тележка 20 фиксируется с возможностью отпускания аналогичным образом к боковому транспортировочному устройству 46 при помощи центрирующих штифтов 142 и частичных вращающихся торсионных пальцев 144. При такой блокировке с возможностью освобождения тележка 20 может приводиться в движение, как объяснено ниже.
Снова ссылаясь на фиг.8 и 10, башенный блок 123 дополнительно включает поворотную платформу 72, вращающуюся по отношению к основанию поворотной платформы 122 в направлении, показанном упомянутой выше стрелкой K, хомут 126, имеющий пару параллельных, разнесенных кронштейнов 127, которые могут вращаться на шарнирах над поворотной платформой 72. Между этими кронштейнами 127 располагается нижняя направляющая труба 124 (также являющаяся частью башенного блока 123). Пара горизонтальных коаксиальных шарнирных пальцев 128 выходит из каждого кронштейна 127 и входит в противоположные стенки нижней направляющей трубки 124, располагаясь в паре опорных элементов 129. Внутренние направляющие тележки 133 идут вдоль внутренних цилиндрических стенок нижней направляющей трубы 124 и разнесены друг от друга на 120° для входа в набор угловых пазов 130 (фиг.9), идущих в продольном направлении вдоль угловых краев тележек 20. Угловые пазы включают фрикционные приводы 26. Нижняя направляющая труба 124 и вторичная направляющая конструкция 125 шарнирно поворачиваются на вращательном пути, показанном стрелкой М на фиг.8 при помощи соответствующей вращательной приводной системы вокруг той же горизонтальной оси, которая определяется пальцами 128. Каждый из кронштейнов 127 включает описанный ниже противовес 131. Центральная точка нижней направляющей трубы 124 располагается вертикально над поворотной платформой 72 башенного блока 123, чтобы оси вращения как поворотной платформы, так и нижней направляющей трубы 124 пересекались ортогонально. Вертикальная ось вращения поворотной платформы 72 совпадает с осью подъемного агрегата 60 и любого бокового транспортировочного устройства 46 и находящейся на нем тележки 20.
Вторичная направляющая конструкция 125 имеет цельную трубу 143, которая удерживается на фиксированном расстоянии от общей точки поворота ее самой и нижней направляющей трубы 124. Таким образом, вторичная направляющая конструкция 125 уравновешивается на своей горизонтальной поворотной точке и имеет внутренние направляющие тележки 138 внутри встроенной трубы. Нижний конец цельной трубы 143 вторичной направляющей конструкции 125 может выравниваться с верхним концом нижней направляющей трубы 124, так что трубы являются коаксиальными, выровненными также оказываются внутренние направляющие тележки 133 и 138. Нижняя направляющая труба 124 может вращаться вокруг коаксиальных шарнирных пальцев 128 и вращается до тех пор, пока ее внешние поверхности не дойдут до упора 132 (фиг.10), идущего от цельной трубы 330, так что направляющие тележки 133 и 138 оказываются выровненными. Направляющие тележки 133 и 138 запитываются так же, как и силовые кабели 27 (описывается ниже), так что фрикционные приводы 26 на тележке 20 могут использовать энергию. Верхний конец трубы вторичной направляющей конструкции 125 имеет внутренние переходные точки крепления для основных кабелей 27, чтобы тележка 20 могла переместиться от внутренних направляющих тележки 138 на основные кабели 27.
Как показано на фиг.2, боковые транспортировочные устройства 46, каждое из которых загружено тележкой 20, удерживающей ракету 18, перемещается по дорожке 15 от отсеков сборки 10. Тележку 20 с ракетой 18 снимают с дорожки 15, переносят на пусковую установку ракет 119, и после пуска ракеты пустую тележку возвращают на пустое боковое транспортировочное устройство 46, затем ставят на дорожку 15, по которой возвращают в отсеки сборки 10 или стеллажи для хранения 7.
Снова обращаясь к фиг.8-10, подъемный агрегат 60 поднимает или опускает тележку 20 с боковым транспортировочным устройством 46, прикрепленным к вращающемуся опорному основанию 136, путем подъема поршня 67 и штока 68 в направлении, показанном стрелкой N (показывающей направления подъема и опускания) для перемещения тележки 20 в нижнюю направляющую трубу 124 и на расстоянии от поворотной платформы 72. Вращающееся опорное основание 136 имеет описанную ниже структуру для разъемного крепления к боковому транспортировочному устройству 46 для точного выравнивания фрикционных приводов 26 тележки 20 с соответствующими внутренними направляющими тележки 133 нижней направляющей трубы 124.
Подъемный агрегат 60, боковое транспортировочное устройство 46 и тележка 20 более детально показаны на фиг.8 и 9. Гидравлический поршень 67 на своем верхнем конце имеет верхний поворотный блок 61, состоящий из невращающегося нижнего опорного основания 135, вращающегося верхнего опорного основания 136 и участка стола 141. Боковые транспортировочные устройства 46 могут перемещаться в место, расположенное по центру по отношению к подъемному агрегату 60. Как упоминалось ранее, вполне вероятно, что колеи 17 по необходимости будут шире, чем традиционные железнодорожные колеи. Сужающиеся конусообразно вверх центрирующие штифты 142 (показано четыре) (детально показаны на фиг.9А) идут от участка стола 141, как и частичные торсионные пальцы 144 (показано четыре) (детально показаны на фиг.9В). Они соединяются с боковым транспортировочным устройством 46, как объясняется ниже. Конечно же, положение соответствующих пальцев/штифтов 142 и 144 и соответствующих гнезд можно поменять местами с боковых транспортировочных устройств 46 на участок 141.
Верхний поворотный блок 61 поворотного агрегата 60 установлен на штоке 68 и может подниматься, как показано стрелкой N, чтобы нижние конусообразные центрирующие штифты 142 и частичные поворотные торсионные пальцы 144, показанные на фиг.9, могли войти в соответствующие гнезда центрирующих штифтов 152 и гнезда торсионных пальцев 154 в боковом транспортировочном устройстве 46.
Верхняя поверхность бокового транспортировочного устройства 46 имеет идущие вверх конусообразные центрирующие штифты и частичные поворотные пальцы, которые практически такие же, как и нижние конусообразные центрирующие штифты 142 и частичные поворотные торсионные пальцы 144, идущие из верхней части участка стола 141. На нижней поверхности тележки 20 предусмотрено соответствующее гнездо для центрирующего штифта 155 и гнездо для торсионного пальца 153 для приема конусообразных центрирующих штифтов и частичных вращающихся пальцев сверху на транспортировочном устройстве 46 для крепления тележки 20 к боковому транспортировочному устройству 46 с возможностью разъединения.
Боковое транспортировочное устройство 46 имеет четыре колеса 58, расположенные и профилированные для скольжения по электрическим рельсам или колеям 17, и включает колеи 17, прилегающие к участку стола 141, кроме того, имеет возможность независимого выравнивания, как упоминалось ранее. Боковое транспортировочное устройство 46 может запитываться от электрических рельс 17 подобно электропоездам или трамваям (которые подключаются к источнику электропитания) или некоторых других бортовых источников питания, такие как топливные ячейки или двигатели внутреннего сгорания.
Нижняя направляющая труба 124 имеет внутренние направляющие тележки 133 (фиг.8, 10), входящие в угловые пазы 130, идущие вдоль вертикальных линий контакта боковых сторон 22, также показанные в увеличенной форме (фиг.10) тележки 20, чтобы фрикционные приводы 26 каждой тележки 20 перемещали каждую тележку 20 вдоль направляющих тележки 133, и для сохранения ориентации тележки 20 в нижней направляющей трубе 124. Предусмотрены фрикционные приводы тележки 26 для захвата основных силовых кабелей 27. Фрикционными приводами тележки 26 являются механизмы, поперечное сечение которых частично охватывает основные кабели/тросы 27, на которых перемещаются тележки 20, из которых они получают энергию или которым они передают энергию. Ссылаясь на фиг.15С, показан один из фрикционных приводов 26, имеющий два противоположных колес фрикционного привода 26А, зацепленных с основным кабелем/тросом 27. Каждый фрикционный привод 26 включает редуктор G и двигатель-генератор М-G. Как упоминалось ранее, к фрикционным приводам 26 могут относиться двигатели-генераторы M-G, редукторы G и пары функционально соединенных с ними противоположно расположенных цилиндрических колес 26А, каждое из которых имеет кольцевой паз 137 для приема кабеля/троса 27, как показано на фиг.9С, 15С и 25. Колеса 26А вращаются в противоположных направлениях, как показано стрелками 01 и 02. Фрикционные приводы 26 располагаются по длине тележки 20. Может быть предусмотрена шероховатость или модификация поверхности на захватных поверхностях приводных колес 26А для повышения соответствующего поверхностного трения пар колес фрикционных приводов 26А, которые в результате зажимают соответствующие кабели/тросы 27. Электрические двигатели-генераторы M-G фрикционных приводов 26 получают электрическую энергию с основных кабелей/тросов 27 (и любые последующие кабели/тросы) для привода/вращения соответствующих пар колес 26А через редукторы G во время поднятия тележек 20 по основным кабелям/тросам 27, а двигатели-генераторы M-G обеспечивают электрической энергией основные кабели/тросы 27 во время опукания тележек 20 по основным кабелям/тросам 27. Двигатели могут вращать больше одной пары колес фрикционного привода 26А. Могут быть также отдельные двигатели, функционально подключаемые к отдельным парам колес фрикционных приводов 26А. Это большей частью зависит от переносимой нагрузки и размера тележки 20.
Фрикционные приводы 26 перемещают тележку 20 вдоль кабелей/тросов 27 или направляющих 133 и 138 (фиг.10). Фрикционные приводы 26 генерируют энергию, которая возвращается в кабели, когда каждая тележка 20 перемещается в противоположном силе гравитации направлении. Генерирование этой энергии вызывает реакцию на гравитационную силу и замедляет движение пустой тележки 20 при ее перемещении вниз, как происходит некоторое время после пуска ракеты 18. Каждый фрикционный привод 26 может иметь не меньше одной противоположной пары колес 26А, как показано на фиг.25. Двигатели фрикционных приводов должны обеспечивать постоянный крутящий момент или переменную частоту для компенсации растяжения кабеля или проскальзывания колес, чтобы каждая группа колес делала одинаковый вклад и поддерживала тележку коаксиальной центру тяжести кабелей/тросов 27 или внутренним направляющим тележки 133 нижней направляющей трубы 124, или внутренним направляющим тележки 138 цельной трубы 330 вторичной направляющей конструкции 125 при перемещении тележки 20 вверх.
Как упоминалось ранее, установка пуска ракет 119 по настоящему изобретению имеет подъемный агрегат 60 для подъема и опускания тележки 20 вертикально до попадания в нижнюю направляющую трубу или выхода из нижней направляющей трубы 124, установленной на поворотной платформе 72 механизма поворотной платформы 63. Боковое транспортировочное устройство 46 может перемещаться по отношению к части стола 141 так, чтобы частичные вращающиеся торсионные пальцы 144 могли войти в гнезда торсионных пальцев 154 на дне бокового транспортировочного устройства 46. Подъемный агрегат 60 поднимает стол 141 на короткое расстояние от опорного основания колей 17 для захвата дна бокового транспортировочного устройства 46. Стол 141 затем фиксируется ко дну бокового транспортировочного устройства 46 до того, как его колеса 58 и вся часть стола 141 поднимается над колеями 17, на которых часть стола 141 может вращаться с боковым транспортировочным устройством 46 и тележкой 20, установленных на нем, при помощи вращательного привода 134 для выравнивания фрикционных приводов тележки 26 с внутренними направляющими тележки 133 в нижней направляющей трубе 124, которая вращается свободно или, при необходимости, с усилителем, с башенным блоком 123 для поддержания выравнивания при изменяющейся силе ветра. Это обеспечивает необходимое стабильное выравнивание тележки 20 с удерживаемой на ней ракетой 18 в нижней направляющей трубе 124.
Ссылаясь на фиг.1, 10 и 11, система пуска ракет 1 включает основной набор кабелей/тросов 27, которые отделяются друг от друга разделительными или стабилизующими блоками 158. Разделительные блоки 158 детально показаны на фиг.10А и включают трехсторонние детали 159, образующие треугольник, кронштейны или фланцы 161, ортогональные плоскости указанного треугольника для зацепления соответствующих кабелей/тросов 27. Фланцы 161 или боковые детали 159 или те и другие сделаны из неэлектропроводного материала. Кабели/тросы 27 могут передавать электрическую энергию, имеют малый вес, как объяснено ниже, а также высокий предел прочности при растяжении. Предпочтительная конструкция и порядок применения разделительных блоков 158 показаны на фиг.10А. От каждого кабеля/троса 27 отходят адаптивные соединители 501 (каждый из которых подобен адаптивному соединителю 247, описанному ниже). Адаптивные соединители 501 предусмотрены вдоль каждого основного кабеля/троса 27 через определенные интервалы, при этом соединители 501 выровнены вдоль соответствующих кабелей/тросов 27. Каждый адаптивный соединитель 501 имеет пару разнесенных, параллельных выровненных фланцев 503, обычно радиально прилегающих к соответствующим кабелям/тросам 27 (однако не точно радиально, потому что они зажимают петли проводов, идущих от соответствующих кабелей/тросов 27). На каждом фланце 503 имеется пара колонок 505, 506 отверстий, при этом каждая колонка отверстий 505, 506 на каждой паре фланцев 503 выровнена. Колонка отверстий 506, расположенная ближе всего к соответствующим кабелям/тросам 27, присоединена к кабелям/тросам 27, как объясняется ниже, по отношению к адаптивному соединителю 247. Через соответствующие выровненные отверстия 505, а также отверстия, выровненные на соответствующих ортогональных фланцах 161, проходит ряд проушин (не показаны) для крепления каждого уголка соответствующих разделительных блоков 158 к соответствующим основным кабелям/тросам 27. Каждый кронштейн 159 соответствующих разделительных блоков 158 имеет увеличенную часть 520, предпочтительно трубчатой конструкции для жесткости и сопротивления против изгибания, идущую между прилегающими основными кабелями/тросами 27, которые имеют плечики и сужающиеся поверхности 522, чтобы ограничить перемещение кабелей/тросов 27 по отношению друг к другу, а также создать боковой зазор между разделительным блоком 158 и каждым кабелем/тросом 27. Кронштейны 159 имеют меньшие концевые участки 524 для крепления друг к другу и соответствующим ортогональным кронштейнам 161. Разделительные блоки 158 могут иметь различные конфигурации; разделительные блоки 158 показаны с квадратным поперечным сечением, однако предпочтительными также являются круглые сечения. Разделительные блоки 158 могут быть цельными, согнутыми для образования треугольной формы и надетыми на три основных кабеля/троса 27, либо же кронштейны 159 могут быть сварены между собой до или после установки кабелей/тросов 27. Кронштейны 159 предпочтительно приваривать к разделительным блокам 158, хотя болтовые соединения также возможны.
В самой верхней части системы пуска ракет 1 находится ряд натяжных аэростатов 160 (фиг.1, 1В, 12-14); имеются также и другие натяжные аэростаты 164 (фиг.1, 1В, 11, 15, 17, 18, 21), располагающиеся вдоль кабелей/тросов 27 для компенсации собственного веса кабелей/тросов 27 и определенного способствования их натяжению. Аэростаты 160 присоединяют к крепежной раме натяжного аэростата или верхнему большому жгуту 162 (показан на фиг.12-14) для удержания части веса основных кабелей/тросов 27 и всех компонентов над другими натяжными аэростатами 164, стыковочной станцией 166 (фиг.13, описывается ниже), включая рабочий вес тележки 20 с готовой к полету ракетой 18. Аэростаты 160 и 164 должны гасить любые подъемные колебания и реакционные силы в результате перемещения тележки 20 и его содержимого и других компонентов. Существуют колебания подъемной силы натяжных аэростатов 160 и 164 из-за суточных колебаний температуры и атмосферного давления. Требуется дополнительная величина подъемной силы, чтобы обеспечить натяжение основных кабелей/тросов 27 до значительной части их безопасной рабочей нагрузки, поскольку кабели/тросы 27 должны поддерживаться максимально близко к вертикали, насколько это практически возможно. Как уже упоминалось, необходимо распределить вдоль кабелей/тросов 27 один или несколько дополнительных наборов аэростатов 164 или 164А (фиг.1, 11, 15, 16, 17, 20А, 20В), которые могут быть меньше аэростатов 160, чтобы ослабить собственный вес кабелей/тросов 27, вес опорной конструкции и разделительных блоков 158 основных кабелей/тросов 27, а также суточные колебания подъемной силы с запасом прочности для предотвращения разрыва кабеля/троса под собственным весом, причем совокупный эффект таков, что кабели/тросы 27 с соответствующими аэростатами приближаются к кабелям/тросам без веса или с отрицательным весом. Основные кабели/тросы 27 зацепляются лебедкой или подъемником 169, которая описывается ниже, либо передают им энергию, и образуют кабельный/тросовый путь 170, показанный на фиг.11 и 13. Кабельный/тросовый путь 170 образуется из основных кабелей/тросов 27, которые тележка 20 захватывает и с которых получает энергию, так что она может перемещаться вдоль кабелей/тросов 27. Крепежная рама натяжного аэростата 162 состоит из верхнего кольца 145 и нижнего кольца 146 (фиг.13-14), которые вращаются в противоположных направлениях на поворотной опоре 149. Верхнее кольцо 145 и нижнее кольцо 146 приводятся в действие системой зубчатого вращательного привода 177 и описываются ниже.
Стыковочная станция 166 показана на фиг.13 и 14. Стыковочная станция 166 имеет верхнюю кольцевую часть 172, которая может вращаться по отношению к нижней кольцевой части 174, части 172 и 174, которые зацепляются с кольцевой опорой 176, приводятся в действие системой зубчатого вращательного привода 147 (соответствующую вращательную приводную систему 379 см. также фиг.28), которая включает реакционные толкатели 178, которые способствуют ее работе. Системы зубчатых вращающихся приводов 177 и 147 также используются для обеспечения противоположного вращения верхнего кольца 145 по отношению к нижнему кольцу 146 крепежной рамы натяжного аэростата 162, а также верхней кольцевой части 172 и нижней кольцевой части 174 стыковочной станции 166, которые упоминаются выше. Вращающиеся приводные системы 177 и 147 крепежной рамы натяжного аэростата 162 и стыковочной станции 166 соответственно согласуются так, что все компоненты между верхней кольцевой частью 172 и нижним кольцом 146 вращаются вместе как одно целое, при этом связанные кабели/тросы удерживаются от закручивания один вокруг другого. Силовые толкатели 178 и 148 противостоят вызываемому ветром вращению или вращению, создаваемому за счет вращения тележки 20, когда нижний конец тележки 20 удерживается в пределах верхней кольцевой части 172 стыковочной станции 166, а тележка 20 вращается в оптимальном направлении для пуска. Стыковочная станция 166 имеет два набора трех внутренних направляющих тележек 180А, 180В (фиг.13, 14) для входа в радиальные пазы 130 каждой тележки 20 с целью сохранения правильного выравнивания и устойчивости соответствующих тележек 20, при одновременной подаче энергии на фрикционные приводы тележек 26.
На фиг.13 и 14 показан блок подъемного кольца 182. Блок подъемного кольца 182 включает короткое трубчатое кольцо 183 с треугольным или возможно круглым сечением, и направляется вторичными кабелями/тросами и связан электрически с вторичными кабелями тросами 184, идущими вверх от верхней кольцевой части 172 стыковочной станции 166 для присоединения к нижнему кольцу 146 крепежной рамы натяжного аэростата 162. Третичные кабели/тросы 186 (фиг.13, 14), идущие вверх от блока подъемного кольца 182 к раме нижнего подъемного блока 198. Блок подъемного кольца 182 направляется вторичными кабелями/тросами 184, подключенными к стыковочной станции 166, и получает от них электрическую энергию. Блок подъемного кольца 182 удерживается третичными кабелями/тросами 186, которые присоединяются к держателю нижнего подъемника 200, который является рамой нижнего подъемного блока 198. Как видно на фиг.14А, концевой захват тележки 196 имеет набор из четырех отверстий 195, через которые свободно проходят вторичные кабели/тросы 184, а также пару отверстий 197, через которые свободно проходят третичные кабели/тросы 186. Электропитание для концевого захвата тележки 196 может подаваться по вторичным кабелям/тросам 184.
Трубчатое подъемное кольцо 183 имеет набор идущих внутрь направляющих конструктивных элементов или внутренних направляющих тележки 188, которые вставляются в соответствующие три паза 130, идущие продольно в тележке 20 для поддержания ориентации тележки 20 в трубчатом подъемном кольце 183 и подачи питания на тележку 20. Блок подъемного кольца 182 включает трубчатое подъемное кольцо 183, блок поворота тележки 189, который включает пару противоположных шарнирных пальцев 190 и вращательную приводную систему 194, направляющие подъемного кольца 192 и реверсивные фрикционные приводы 193. Вращательная приводная система 194 вращает трубчатое подъемное кольцо 183, которое может поворачиваться вокруг горизонтальной оси, определяемой пальцами 190. Центр тяжести трубчатого подъемного кольца 183 попадает в его геометрический центр, который совпадает с осью пальцев 190. Трубчатое подъемное кольцо 183 имеет механизм зажима или блокировки, чтобы обеспечить крепление его к тележке 20 с возможностью разъединения так, чтобы центр тяжести 36 тележки 20 удерживался на оси пальцев 190. Ось вращения реверсивного толкателя 31 с переменным шагом сделана параллельной горизонтальной оси, определяемой пальцами 190. Третичные кабели/тросы 186 соответственно присоединены к соответствующим направляющим подъемного кольца 192. Третичные кабели/тросы 186 представляют собою две группы кабелей/тросов фиксированной длины, крепятся к держателю нижней тали 200 под углом 180°, чтобы присоединить держатель 200 к направляющим подъемного кольца 192 внизу и помочь направить перемещение концевого захвата тележки 196 (описывается ниже), кроме того, в случае необходимости они также могут передавать электрическую энергию.
Блок подъемного кольца 182 включает вращательную приводную систему 194 для изменения угла места, показанного стрелкой Р (фиг.13) трубчатого подъемного кольца 183 и удерживаемой ей тележки 20 по отношению к кабелям/тросам 184 и 186. Концевой захват тележки 196 также показан на фиг.12, 13 и 14. Концевой захват тележки 196 может удерживаться кабелем/тросом нижнего подъемника 201, крепящимся к нижнему подъемному блоку 198, установленному на держателе нижнего подъемника 200. Кабель/трос нижнего подъемника 201 перемещается в направлениях, показанных стрелками Q на фиг.14. Концевой захват тележки 196 направляется во время движения вторичными кабелями/тросами 184, по которым передается электрическая энергия, и удерживается третичными кабелями/тросами 186. Концевой захват тележки 196 может крепиться к верхней части тележки 20 с возможностью разъединения при помощи стопорных штифтов 204, вставляемых в гнезда стопорных штифтов 32 в верхней части тележки 20. Когда концевой захват тележки 196 жестко закреплен к тележке 20, концевой захват тележки 196 может поднимать или помогать поднимать тележку 20 от стыковочной станции 166 и вверх через блок подъемного кольца 182, пока центр тяжести 36 тележки 20 не совпадет с горизонтальной поворотной осью блока подъемного кольца 182, определяемой пальцами 190, когда блок подъемного кольца 182 опускается до контакта с верхней кольцевой частью 172 стыковочной станции 166. Длина кабелей/тросов 186, направляющих движение концевого захвата 196, должна быть достаточно длинной, чтобы тележка 20 могла вращаться вокруг горизонтальной оси, когда концевой захват 196 отсоединяется от тележки 20 и поднимается на небольшое расстояние с зацепления со стыковочным блоком 166.
Нижний подъемный блок 198 крепится к нижнему концу держателя нижнего подъемника 200, как указано выше, а также, как указано выше, используется для подъема или помощи фрикционным приводам 26 тележки 20 в перемещении тележки 20 до входа в трубчатое подъемное кольцо 183 или выхода из него. Держатель нижнего подъемника 200 поднимается и опускается, как показано стрелкой R на кабелях/тросах подъемника 202 от верхнего подъемника 169, прикрепленного к крепежной раме натяжного аэростата 162, как показано на фиг.12, 13 и 14. Питание подается на подъемник 169 через вторичные кабели/тросы 184. Для питания подъемника 168 может использоваться трехфазный или постоянный ток. В показанной трехфазной системе группа четырех вторичных кабелей/тросов 184, дополнительно обозначенных (фиг.14) слева направо как кабель/трос 184А - это первая фаза из трех, кабель/трос 184В - это вторая фаза из трех, кабель/трос 184С - это третья фаза из трех, а 184D, что может использоваться в качестве электрической нейтрали или дубликата одной из трех фаз. Как упоминалось выше, аэростаты 160 также удерживают верхние компоненты системы пуска ракет 1 и обеспечивают значительную часть натяжения, требуемого для удержания основных кабелей/тросов 27 и вторичных кабелей/тросов 184 в натянутом состоянии, даже с рабочей нагрузкой. Как показано на фиг.12, 13 и 14, крепежная рама натяжного аэростата 162 располагается под натяжными аэростатами 160.
На фиг.1, 1В, 11, 15, 16, 17, 20А и 20В показан ряд групп аэростатов 164 или 164А, используемых для снижения собственного веса кабеля/троса 27, а также связанных с ними опорных конструкций и разделительных блоков. Аэростаты 164 являются конусообразными, а аэростаты 164А - цилиндрическими, хотя возможны и другие формы и конфигурации, при этом они входят в рамки настоящего изобретения. Каждый из ряда больших жгутов 206, имеющих держатели натяжных аэростатов 208, крепится к основным кабелям/тросам 27 при помощи трехсторонних нижних разделительных или стабилизирующих блоков 210. Каждый нижний разделительный блок 210 сконструирован и присоединен к основным кабелям/тросам 27 так же, как и разделители 158, которые сконструированы и используются, как описано ранее. Аэростаты 164 или 164А соответственно присоединяются к держателям аэростатов или точкам крепления 208 (фиг.18). Нижний разделительный блок 210 имеет три кронштейна 211, образующих равносторонний треугольник, если смотреть сверху, при этом кронштейны 211 параллельны соответствующим кронштейнам 222 большого жгута 206. Нижний разделительный блок 210 имеет соединительную конструкцию 214 в местах пересечения кронштейнов 211, от которых идут провода 215. Каждый провод 215 от нижнего разделительного блока 210 идет для крепления к соответствующим держателям аэростата 208 большого жгута 206. Предусмотрен также ряд верхних разделительных или стабилизирующих блоков 216, которые, как разделительные блоки 210, разделяют основные кабели/тросы 27, а также удерживают на месте кабельные/тросовые стяжки 218 и 219. Верхние разделительные блоки имеют конструкцию и используются так же, как и разделительные блоки 158 и нижние разделительные блоки 210. Каждый верхний стабилизатор 216 имеет три кронштейна 217, образующих на виде сверху равносторонний треугольник, при этом кронштейны 217 параллельны соответствующим кронштейнам 222. Кабельный/тросовый соединитель 220 находится на пересечении соответствующих кронштейнов 217. Пара стабилизирующих стяжек 218 присоединяется на одном конце к кабельному/тросовому соединителю 220 на противоположных концах кронштейнов 217 и к держателям стяжек 221 в центре кронштейнов 222 параллельно соответствующим кронштейнам 217. Другой набор кабельных/тросовых проводов 219 соединяется между стяжными соединителями 220 и держателями аэростатов 208. Эта конфигурация помогает стабильно удержать жгут 206 на месте. Жгуты 206 устанавливаются периодически с аэростатами 164 и 164А соответственно по длине основных кабелей/тросов 27 для компенсации собственного веса кабелей/тросов 27 и любых присоединенных конструкций, а также вызвать натяжение кабелей/тросов, чтобы помочь удержать их в вертикальном положении.
Конкретная система соединения различных компонентов верхнего разделителя 216 описана ниже. Верхний разделительный блок 216 и присоединенные к нему элементы показаны на фиг.15А, 15В и 15С. Как указывалось выше, верхний разделитель 216 состоит из трех кронштейнов 217, образующих равносторонний треугольник. Как показано на фиг.15В и 15С кабельный/тросовый соединитель 220 включает опорную плиту 902, имеющую центральный кронштейн 904 и два кронштейна 906 и 908, разделенных от центрального кронштейна 904 углом, превышающим 90°. Кабельный/тросовый соединитель 220 дополнительно имеет опорную часть 910, которой обычно является противоположный кронштейн 904. Опорная плита 902 предпочтительно является плоской, а перпендикулярно ей идет кабельный/тросовый соединительный фланец 912, идущий вдоль центра опорной части 910. Пара опорных фланцев кронштейнов 914 и 916 также идет перпендикулярно с опорной плиты 902 и расположена на равном расстоянии от кабельного/тросового соединительного фланца 912. Кронштейны 904, 906 и 908 имеют отверстия и для приема проушин 920, 918 и 922 соответственно, идущих перпендикулярно через соответствующие кронштейны. 904, 906 и 908. Кабельный/тросовый соединительный фланец 912 имеет ряд расположенных на равном расстоянии отверстий для приема проушин 924, идущих вдоль высоты фланца 912.
Каждый кабель/трос 27 имеет, по меньшей мере, одну, а более вероятно - несколько соединительных конструкций 925, при этом каждая из таких соединительных конструкций 925 состоит из пар параллельных, противоположных, разнесенных соединительных фланцев для приема фланца 926, 927, каждая из которых параллельна соответствующим осям кабелей/тросов 27. Фланец 926 имеет параллельные выровненные колонки отверстий для приема проушин 928 и 930, которые выровнены с соответствующими отверстиями 928, 930 на другом фланце 927. Чтобы присоединить каждый кабельный/тросовый соединитель 220 к месту на соответствующем кабеле/тросе 27, кабельный/тросовый соединительный фланец 912 вставляют между соединительными фланцами для приема фланца 926, 927 с отверстиями 924, выровненными с каждым из соответствующих отверстий 928. Набор проушин 932 вставляют в соответствующие выровненные отверстия 928 и 924 и крепят к приемнику гайки или другого крепежного элемента 933. Для дальнейшего соединения соответствующие кабельных/тросовых соединителей 220 с соответствующими кабелями/тросами 27 используются подобные болты 256, как показанные на фиг.22, для зажима петель 244 кабеля/троса 27. Соединительные фланцы для приема фланца 926, 927 находятся достаточно близко друг к другу, чтобы фрикционные приводы 26 могли зацепить соответствующие кабели/тросы 27, когда тележки 20 с фрикционными приводами 26 переводят фланцы 926 и 927 в полное рабочее зацепление с соответствующими кабелями/тросами 27.
Как указывалось ранее, пары стабилизирующих стяжек 218 присоединяют кабельный соединитель 220 к соответствующим центрам пары кронштейнов 222 больших жгутов 206. Каждая стабилизирующая стяжка 218 имеет на одном конце соединительный хомут 934 с парой параллельных фланцев 936 с выровненными отверстиями 938, через которые проходит проушина 940, которая также проходит через отверстие 908 для дальнейшего приема гайки или другого приемника крепежного элемента 942 для присоединения стабилизирующей стяжки 218 к кабельному/тросовому соединителю 220. Аналогичным образом кабельная/тросовая стяжка 219 имеет сцепной хомут 944 с парой параллельных фланцев 946 с парой выровненных отверстий 948. Кронштейн 904 вставлен между фланцами 946, а проушина 950 вставлена в отверстия 948 и 920, а также в гайку или другой приемник крепежного элемента 952.
На фиг.15Е показана деталь присоединения нижнего разделительного блока 210 (фиг.15) к кабелям/тросам 27 и большому жгуту 206 при помощи соединительной конструкции 214. Пара соединительных конструкций 925 крепится к кабелю/тросу 27 при помощи петель 244. Соединительная конструкция 925 состоит из вертикального фланца 960, имеющего соединительный фланец 962, который идет от него и включает колонку отверстий в проушинах 963. Набор опорных фланцев кронштейнов 966 идет от вертикального фланца 960, к которому они привариваются с использованием подходящей процедуры сварки, и соответственно присоединяются к соответствующим кронштейнам 217 нижнего разделительного блока с использованием подходящей сварочной или иной процедуры. Опорные фланцы кронштейнов 966 расположены под углом друг к другу и под углом в месте контакта с соответствующими кронштейнами 217, чтобы обеспечить конструктивно прочную опору. Соединительный фланец 962 располагается между параллельными фланцами соединительной конструкции 925, причем отверстия выровнены с отверстиями 928 (см. фиг.15 В) и проушинами 932, и вставкой через соответствующие выровненные отверстия соединительного фланца 962 и отверстий 928, а также через гайки и другой приемник крепежного элемента 933 (см. фиг.15А) для крепления соединительной конструкции к кабелю/тросу 27.
Вертикальный кронштейн 960 имеет пальцеобразный участок 968, через который проходит отверстие 970. Конец каждого провода 215 для крепления нижнего разделительного блока 210 к большому жгуту 206 имеет сцепной хомут 972, состоящий из параллельных фланцев 974, 976, через которые проходят выровненные отверстия для приема проушин 978. Хомут 972 перемещается так, что пальцеобразный участок 968 вставляется между фланцами 974 и 976, при этом отверстия 970 и 978 выровнены. Проушина 980 вставляется через отверстия 970 и 978 и в гайку или другой приемник крепежного элемента 982.
Ранее упоминалось, что стабилизирующие стяжки 218 присоединяются к центру кронштейнов 222. Аппарат для этого показан на фиг.15D. Фланец соединения стяжек 984 крепится к центру каждого кронштейна 222 и идет от него. Фланец 984 имеет два коротких кронштейна 986, каждый из которых имеет отверстие для приема проушины 988. Каждая стяжка 218 имеет соединительный хомут 944 с фланцами 946, как описывалось выше. Хомуты 944 от каждой стяжки 218 надеваются на соответствующий кронштейн 986 фланца 984, а проушина вставляется через отверстия 948 и 988 и затягивается на месте крепежным элементом, таким как гайка.
Конструкция для крепления каждого жгута, разделителя и стабилизатора предпочтительно состоит из одного типа компонентов и подкомпонентов. Этот тип конструкции является прочным, устойчивым, простым в изготовлении и вводе в эксплуатацию.
Ряд трехсторонних разделительных или стабилизирующих блоков 260, которые практически идентичны разделительным блокам 210, расположены над большим жгутом 206 (как показано на фиг.18). Детальная конструкция разделительных блоков 260 и ее крепление к основным кабелям/тросам 27 практически такие же, как разделительные блоки 158 и нижние разделительные блоки 210. Разделительные блоки 260, показанные на фиг.18, крепятся к кабелям/тросам 27 при помощи соединительных конструкций 262 в месте пересечения пар соединенных кронштейнов трех кронштейнов 264, образующих равносторонний треугольник. Набор легковесных кабелей/тросов 266 (по сравнению с относительно тяжелыми кабелями/тросами 27) идет от соединительной конструкции 262 к держателям аэростатов 208, конструкция которых удерживает их на больших жгутах 206. Легковесные кабели/тросы 266 удерживают большие жгуты 206 во время сборки пусковой системы или во время технического обслуживания аэростатов 164.
Набор трех электрических реакционных толкателей 800 присоединен к вращающимся опорным стыкам 802 в месте пересечения соответствующих кронштейнов 222, как показано на фиг.18 и 19. Каждый толкатель 800 включает вентилятор 804, установленный в корпусе вентилятора 806. Каждый корпус 806 установлен на шарнирах между парами кронштейнов 808. Каждый кронштейн 808 имеет коаксиальные шарнирные пальцы 809, идущие в корпус 806, позволяющие каждому корпусу 806 вращаться вокруг оси S-S в направлении стрелок T по часовой и против часовой стрелки. Кронштейны 808 ответвляются от центрального кронштейна 810, который крепится к вращающимся опорным стыкам 802, как описывалось выше. Толкатели 800 - это электрические толкатели в карданном подвесе. Толкатели 800 могут шарнирно поворачиваться и вращаться и действуют для удержания пусковой системы 1, ориентированной по отношению к вертикали. Толкатели 800 компенсируют силу ветра, а также частичное или полное сдувание любых аэростатов 164, пока они не будут заменены или иначе отремонтированы. Положение больших жгутов 206 по отношению к основанию пусковой системы 1 контролируется датчиками положения 812, которыми может быть глобальная система навигации и определения положения (GPS) для передачи контрольных данных положения на компьютеры, управляющие направлением и усилием толкателей 800.
Ниже приводится объяснение случая, в котором аэростаты 164 (распространяется на аэростаты 164А) крепятся к основным кабелям/тросам 27 (см. фиг.15, 16, 17, 18, 20А и 20В). На фиг.15 для большей ясности не показаны разделительный блок 260 и легковесные кабели/тросы 266, показанные на фиг.18, расположенные над верхним стабилизатором 216. Если посмотреть на фиг.15, показана часть основных кабелей/тросов 27, и предусмотрен нижний стабилизатор 210 и верхний стабилизатор 216 для стабилизации верхнего жгута 206. Предусмотрено три аэростата 164 (только один из них показан сплошной линией на фиг.15) для компенсации собственного веса кабеля/троса 27, различных стабилизаторов, а также чрезмерной нагрузки, прикладываемой к кабелям 27. В зависимости от диаметра для аэростатов 164 могут потребоваться трубчатые сепараторы, сделанные из того же материала, что и аэростаты, и накачиваемые тем же газом легче воздуха. Чтобы уберечь кабели/тросы 27 от контакта с аэростатами 164 (или аэростатами 164А), предусмотрены стабилизирующие ремни или сетка 227 (фиг.15А) для крепления аэростатов 164 к сепараторам кабелей/тросов, таким как верхний разделительный блок 260 (фиг.18), для предотвращения такого контакта. Каждый стабилизирующий ремень 227 является частью стабилизатора 228, который присоединен к каждому кабелю/тросу 27 так же, как другие стабилизаторы крепятся к кабелям/тросам 27. Стабилизаторы 228 дополнительно имеют соединительный элемент 229 для удержания соответствующих стабилизирующих ремней 227 на месте. То, как это можно сделать, более детально показано на фиг.16, которая является видом сверху в направлении 16-16 фиг.15. Как видно, каждый стабилизатор 228 присоединен к основным кабелям/тросам 27 в пределах трех пересечений стабилизатора 228. Стабилизатор 228 состоит из трех соответствующих кронштейнов 234, которые взаимно пересекаются, образуя равносторонний треугольник. От каждого соединительного элемента 229 пара стабилизирующих ремней 227 образует угол так, что соответствующие пары касаются соответствующих аэростатов 164, к которым они расположены почти по касательной. Каждый ремень 227 крепится к аэростату 164 касательным соединителем ремня 224. Соединители ремней 224 предотвращают касание кабелей/тросов 27 к аэростатам 164 (или аэростатам 164А). Соединителями ремней 224 (фиг.15) предпочтительно могут быть клей, пластическая сварка или сшивание с достаточно прочной резьбой для присоединения стабилизирующих ремней 227 к соответствующим аэростатам 164 (или аэростатам 164А).
На фиг.17 показано три аэростата 164, присоединенных к большому жгуту 206 в держателях аэростата 208. Показан верхний стабилизирующий блок 216, имеющий свои стяжки стабилизирующего кабеля/троса 218, присоединенные к держателям стяжек 221 на кронштейнах 222. На фиг.17 показаны векторы силы FF, направленные вдоль натяжного кабеля/троса 219 и представляющие собой силы натяжения от кабельных/тросовых соединителей 220 к держателям аэростатов 208.
Вид сбоку системы крепления показан на фиг.20А и 20В. Каждый аэростат 164 (фиг.20А) и 164А (фиг.20В) имеет легкие, прочные, натяжные, нижние соединители 232, присоединенные к держателю аэростата 208 большого жгута 206. Один или несколько соединителей 232 может иметь трубчатую форму для подачи газа легче воздуха в качестве замены в каждый аэростат 164 с целью компенсации утечки. Аэростаты 164 и 164А - это аэростаты легче воздуха, так что растягивающие силы FF показаны стрелками вдоль соединителей 232. Соединители 232 направлены по касательной оболочке каждого аэростата 164 и 164А. Показан набор трех или больше соединителей или стабилизаторов 228 (фиг.16) для соединения соответствующих аэростатов между собой в нескольких точках.
Как объяснялось ранее, крепежная рама натяжения аэростатов 162 имеет верхнюю вращающуюся часть 145 и нижнюю вращающуюся часть 146 (фиг.13, 14), которые соединены через кольцевую опору 149 на вертикальной оси для снижения трения от вращательного перемещения, как показано на фиг.12. Реакционные толкатели 148 по касательной прикреплены к периметру верхней вращающейся части 145. Аналогичным образом реакционные толкатели 178 прикреплены к периметру нижней части 174 стыковочной станции 166. Двигательные модули, установленные на верхней вращающейся части 145 и на части 174, используются для предотвращения их вращения. Двигательные модули на верхней части 145 вместе с системой зубчатого вращательного привода 177 способствуют вращению нижней вращающейся части 146 по отношению к верхней вращающейся части 145. Аналогичным образом двигательные модули на нижней части 174 вместе с системой зубчатого вращательного привода 147 (фиг.13, 14) способствуют вращению верхней вращающейся части 172. Вторичные кабели/тросы 184, собранные в две группы, присоединяются противоположно друг другу (180°) на нижней вращающейся части 146. Верхний подъемник 169 крепится к нижней вращающейся части 146. При помощи кабелей/тросов 184 крепежная рама аэростата 162 крепится к стыковочной станции 166 (фиг.13, 14) и передается электрическая энергия в случае необходимости. Кабели/тросы 184 также направляют перемещение держателя нижнего подъемника 200, концевого захвата тележки 196 и блока подъемного кольца 182. Кабели/тросы 184 имеют достаточную длину для обеспечения возможности безопасного ускорения вниз при локальном ускорении держателя нижнего подъемника 200 под действием силы тяжести и подвешенных к нему предметов, достаточную длину, чтобы можно было отсоединить ракету 18 от ее ограничителя в условиях свободного падения и ускоренного освобождения тележки 20. Требуется также дополнительная длина кабелей/тросов 184, чтобы обеспечить дополнительный период времени для снижения скорости до полной остановки держателя нижнего подъемника 200 и всех элементов (включая загруженную или пустую тележку 20), которые к нему подвешены. Дополнительная длина кабеля/троса позволит выполнить снижение скорости полностью загруженной тележки 20 до состояния покоя в случае кратковременного пропуска зажигания бустером.
Как объяснено выше и дополнительно описано ниже, необходимо средство для крепления элементов системы 1 к различным кабелям/тросам. На фиг.21 показан кабель/трос 240, выполненный из жил 242 провода. Каждая жила 242 кабеля/троса 240 может иметь петлевые участки или петли 244, идущие от внешней поверхности корпуса кабеля/троса 240 для крепления элементов к кабелю/тросу 240, при этом большая часть внешней поверхности кабеля/троса остается свободной. Каждая петля 244 идет из корпуса каждого кабеля/троса 240 и возвращается в корпус кабеля/троса 240. В качестве примера на фиг.22 показан адаптивный соединитель 247, который более детально объясняется ниже. Адаптивный соединитель 247 имеет выступающий фланец 248 с рядом болтовых отверстий 249, а также ряд болтовых отверстий 250, проходящих через пару параллельных стенок 252, образующих общее основание 253. Адаптивный соединитель 247 можно подогнать к кабелю/тросу 27, при этом петли 244 перемещаются между параллельными стенками 252, а их соответствующие петлевые отверстия 254 выровнены с отверстиями 250. Болт 256 может вставляться через петлевые отверстия 254 и болтовые отверстия 250 для крепления адаптивного соединителя 247 к кабелю/тросу 27, и на соответствующие болты 256 может быть надета гайка для обеспечения прочного соединения. Вид сверху приведен на фиг.23. В качестве альтернативы могут использоваться параллельные стенки 255, разделенные разделителем 259 в качестве альтернативного адаптивного соединителя 257, как показан вид сверху на фиг.24. Кабель/трос 27 может быть захвачен парой колес фрикционных приводов 26А тележек 20, как показано на фиг.25, вращающихся в противоположных направлениях O1 и O2.
Для использования системы пуска ракет 1, описанной до сих пор, ракеты 18 загружаются в тележки 20, соответственно в один из аппаратов, показанных на фиг.5, и транспортируются вдоль дорожки 15 боковым транспортировочным устройством 46. Боковое транспортировочное устройство 46 крепится к подъемному агрегату 60 при помощи соответствующих конусообразных центрирующих штифтов 142 и частичных вращающихся торсионных пальцев 144 и их соответствующих гнезд для центрирующих штифтов 152 и гнезд для частичных вращающихся торсионных пальцев 154, как объяснено со ссылкой на фиг.9. Вторичные кабели/тросы 184 и первичные кабели/тросы 27 удерживаются натянутыми при помощи натяжных аэростатов 160 и аэростатов 164 соответственно, при этом аэростаты 164 обеспечивают натяжение основных кабелей/тросов 27. Натяжение расположенным ниже кабелям/тросам передается через крепежную раму натяжных аэростатов 162, а разделение кабелей/тросов и дополнительное натяжение достигается через большие жгуты 206, разделители 158 и разделитель 228 (фиг.11,15 и 18).
Каждая тележка 20 вращается до выравнивания с внутренними направляющими тележки 133 и загружается в нижнюю направляющую трубу 124 (фиг.8). Верхняя часть нижней направляющей трубы 124 затем опрокидывается в зацепление с нижней частью вторичной направляющей конструкции 125 (фиг.10), пока нижняя направляющая труба 124 не дойдет до упора 132 для выравнивания направляющих тележки 133 и 138, как описывалось ранее. Затем используются фрикционные приводы 26 для перемещения тележки 20 вдоль кабеля/троса 27 через стыковочную станцию 166 в ее верхнюю часть 172 и частично в блок подъемного кольца 182, который опускается при помощи подъемника 169 так, что блок подъемного кольца 182 входит в верхнюю часть 172 стыковочной станции 166 (фиг.13, 14). Концевой захват 196 опускается и крепится к верхнему концу тележки 20. Нижний подъемный блок 198, питание на который подается по вторичным кабелям/тросам 184, передаваемым с кабелей/тросов 27, поднимает тележку 20 до зацепления с блоком подъемного кольца 182 так, что комбинированный центр тяжести блока подъемного кольца 182, тележки 20 и ракеты 18 совпадают с осью поворота блока подъемного кольца 182. Таким образом, нижний подъемный блок 198 помогает фрикционным приводам 26, которые задействуют внутренние направляющие тележки 180А и 180В в подъеме тележки 20 вверх по отношению к стыковочной станции 166. Затем концевой захват тележки 196 расцепляет стопорные штифты 204 от гнезд стопорных штифтов 32 тележки 20 и поднимается на минимальное расстояние при помощи нижнего подъемника 198. Блок подъемного кольца 182 направляется вторичными кабелями/тросами 184 и удерживается третичными кабелями/тросами 186. Подъемник 169 дополнительно поднимает тележку 20, пока нижний конец тележки 20 больше не находится в нижней части 174 стыковочной станции 166, а только в верхней части 172. Теперь система зубчатого вращательного привода 147 в нижней стыковочной станции 166 и система зубчатого вращательного привода 177 в раме натяжного аэростата 162 согласованно вращают все компоненты между кольцевыми опорами 176 и 149 в направлении, подходящем для пуска ракеты 18. Толкатели 148 и 178 работают одновременно для предотвращения вращения нижней части 174 стыковочной станции 166 и верхнего кольца 145 крепежной рамы натяжных аэростатов 162 (фиг.14).
Подъемник 169 затем поднимает тележку 20 полностью из зацепления со стыковочной станцией 166 (тележка 20, удерживающая ракету 18, должна подниматься выше и выше с учетом их комбинированного веса) и настолько высоко, как это нужно, в центр трубчатого кольца 183 для безопасного пуска ракеты 18. Вращательная приводная система 194 совместно с реверсивными толкателями с переменным шагом 31, повернутыми на 90°, вращает короткое трубчатое кольцо 183 с тележкой 20 на соответствующий угол по отношению к горизонтали, подходящий для пуска. Реверсивные толкатели с переменным шагом 31 используются для способствования вращательной приводной системе 194 и предотвращения раскачивания тележки 20 вокруг горизонтальной оси на пальцах 190. Когда тележка 20 находится на желаемом углу места для пуска и является устойчивой, реверсивные толкатели с переменным шагом 31 дальше вращаются вокруг своих петель, чтобы избежать контакта с горячими ракетными газами.
Возможны вариации способствования вращательной приводной системе 194. Сюда относится позиционирование и стабилизация тележки 20 в блоке подъемного кольца 182, в частности для предотвращения колебания тележки 20 на шарнирных пальцах 190. Как показано на фиг.13В-13С, на обоих концах тележки 20 может быть предусмотрен реверсивный толкатель с переменным шагом 31 и пара сопутствующих ступичных двигателей 822. Каждый толкатель 31 и ступичный двигатель 822 может располагаться на одном конце тележки 20 под торцевой крышкой 830. Каждый толкатель 31 имеет комплект вращающихся лопаток 826, которые устанавливаются в поворотной опоре толкателя 828 на обоих концах тележки 20. Каждая опора 828 устанавливается на блок петель 829 и перемещается между положением покоя (показано пунктирной линией на фиг.13С) и активным положением, параллельным продольной оси тележки 20 (показано сплошными линиями на фиг.13С) при помощи гидравлического исполнительного механизма 832, который поворачивается вокруг шарнира исполнительного механизма 834. Когда толкатели 31 находятся в активном положении, создается воздушный поток, показанный стрелками U. Это предотвращает колебание тележки 20. Ступичные двигатели 822 являются реверсивными, потому что воздушный поток может перемещаться в обоих направлениях. Аналогично, шаг лопаток 826 может изменяться для учета изменения окружающего воздуха, в котором лопатки 826 вращаются. Однако когда происходит зажигание двигателя ракеты 18, толкатели 31 могут переместиться на тупой угол, как показано пунктирными линиями в левой части фиг.13С, чтобы избежать кратковременного выхлопа бустера. Верхний конец толкателя 31 также перемещается в свое тупоугольное положение, чтобы можно было загрузить ракету 18 на тележку 20. Следует отметить, что внутренняя часть тележки 20 имеет непрерывную стойкую к давлению и температуре трубу 836, идущую от одного конца к другому для удержания внутри ракеты 18. Набор трех и более центрирующих опор 840 сохраняют центрирование каждого реверсивного толкателя с переменным шагом 31.
Верхний конец подъемного кабеля/троса 202 (фиг.14) выводится из верхнего подъемника 168, реверсивные фрикционные приводы 193 блока подъемного кольца 182 начинают осуществлять перемещение вниз, находясь в функциональном зацеплении с вторичными кабелями/тросами 184. Подъемный кабель/трос 202 разматывается и перемещает блок подъемного кольца 182, тележку 20, ракету 18 и все другие компоненты, удерживаемые кабелем/тросом 202, в направлении вниз при помощи приводов 193, способствующих преодолению трения и сопротивления воздуха, так что они находятся в состоянии свободного падения с ускорением lg, а ракета 18 становится невесомой по отношению к тележке 20. В верхнем подъемнике 168 имеется небольшое трение для сохранения управления во время свободного падения, а также, чтобы избежать провисания и неконтролируемого разматывания кабеля/троса 202. Перед свободным падением открываются отводные концевые крышки 30 (фиг.9, 9С, 13, 13А) тележки 20 (или открываются концевые крышки 830, показанные на фиг.13С). Отводятся отводные кронштейны 34 или 35 (фиг.26) внутри тележки 20, которые удерживали ракету 18 в тележке 20 (как описывается ниже), и зажигается кратковременный бустерный ракетный двигатель ракеты 18 для выведения ракеты 18 из тележки 20. Кратковременный бустерный ракетный двигатель работает только в стойком к температуре и давлению корпусе тележки 20, чтобы предотвратить повреждение пусковой системы 1.
После того, как ракета 18 проходит достаточно далеко на своей баллистической траектории, можно безопасно зажечь основные двигатели, что необходимо для предотвращения повреждения пусковой системы 1. Выведение кабелей/тросов 202 из верхнего подъемника 168 (фиг.12) постепенно прекращается, в то время как реверсивные фрикционные приводы 193 блока подъемного кольца 182 (фиг.13) работают в тормозном режиме, чтобы предотвратить дальнейшее свободное падение тележки 20, держателя нижнего подъемника 200, концевого захвата тележки 196 и блока подъемного кольца 182 (фиг.12, 13, 14). Реверсивные толкатели с переменным шагом 31 (фиг.13С) затем могут использоваться для способствования вращению тележки 20 в вертикальное положение, прежде чем они будут отведены в концы тележки 20 и могут использоваться для удаления выхлопных газов изнутри тележки до закрытия крышек защиты от атмосферных воздействий 30.
Короткое трубчатое кольцо 183 блока подъемного кольца 182 с пустой тележкой 20 вращается в вертикальное положение (при подготовке к вращению вокруг вертикальной оси, поскольку вращательный момент инерции наименьший, когда тележка 20 находится в вертикальном положении), опускается при помощи верхнего подъемника 168, соединенного с верхней частью 172 стыковочной станции 166, показанной на фиг.13 и 14. Тележка 20 и концевой захват тележки 196 могут быть затем соединены для фиксации тележки 20 в концевом захвате тележки 196, до того как тележка 20 опустится до контакта с верхней частью 172, если требуется дополнительная опора или направление. Нижний конец тележки 20 затем опускается до контакта с верхней частью 172 стыковочной станции 166. Нижняя часть 146 (фиг.14) крепежной рамы натяжных аэростатов 162 и верхняя часть 172 стыковочной станции 166 затем вращаются так, что внутренние направляющие тележки 188 блока подъемного кольца 182 (фиг.13, 14) и внутренние направляющие тележки 180 верхней части 172 выравниваются с кабелями/тросами 27 стыковочной станции 166 (фиг.13). Затем подъемник 168 опускает концевой захват тележки 196 на верх блока подъемного кольца 182 (фиг.12, 13, 14) и отпускает тележку 20. Блок подъемного кольца 182 также отцепляется от тележки 20.
Тележка 20 быстро перемещается вниз по кабельному/тросовому пути 170 (фиг.11), образуемому основными кабелями/тросами 27, при помощи рекуперационного торможения, чтобы поддерживать скорость перемещения тележки 20 вниз на управляемом уровне. Энергия, возвращаемая в основные кабели/тросы 27 в этой и других пусковых станциях, передается на другую пусковую станцию для дополнения или замены энергии, требуемой для подъема другой тележки 20 вверх по ее кабельному/тросовому пути 170. Предусмотрена группа минимум из четырех активных пусковых систем, и пятой, используемой в качестве готового резерва для легких заданий, таких как туризм или затяжных прыжков с парашютом с использованием специальных легковесных тележек, пока активной пусковой установке не потребуется техническое обслуживание или понадобится большая скорость пуска ракет. Комбинированная скорость пуска один раз в час представляется целесообразной.
После того как пустая тележка 20 снова входит во вторичную направляющую конструкцию 125 (фиг.1А, 2, 8, 10 и 11), она дальше опускается, пока тележка 20 не отцепляется от вторичной направляющей конструкции 125 и не становится отцентрированной в нижней направляющей трубе 124 в точке, в которой комбинированные центры тяжести тележки 20 и нижней направляющей трубы 124 совпадают с осью вращения нижней направляющей трубы 124. Затем нижняя направляющая труба 124 возвращается в вертикальное положение, а тележка 20 опускается на соответствующим образом выровненное боковое транспортировочное устройство 46 сверху на подъемном агрегате 60. Боковое транспортировочное устройство 46 возвращает пустую тележку 20 на взрывобезопасный отсек сборки 10 для повторной загрузки или на стеллажи для хранения 7 для замены и ремонта. Другая предварительно собранная ракета 18, тележка 20 и боковое транспортировочное устройство 46 могут быть загружены в систему 1, и следующая ракета 18 может быть запущена, как описано выше.
Одной возможной конструкцией отводного кронштейна является отводной кронштейн 34 в направлении стрелки V для удержания ракеты 18 в тележке 20, как показано на фиг.26. Ракета 18 имеет не меньше шести расположенных на равном расстоянии друг от друга регулируемых пазов 300 для приема отводных кронштейнов 34, при этом каждый кронштейн 34 предназначен для установки в один паз 300.
Как показано на фиг.27, могут быть предусмотрены разные чередующиеся отводные кронштейны 35. Каждый отводной кронштейн 35 имеет головной элемент 302 для входа в один из пазов 300, и базовый элемент 304, от которого идут противоположные коаксиальные шарнирные пальцы 306. Стержень 308 соединяет головной элемент 302 и базовый элемент 304, при этом между базовым элементом 304 и стержнем 308 проходят усилительные перемычки или растяжки 310. Тележка 20 имеет внутреннюю взрывобезопасную трубу 312 с полостью 314. Труба 312 имеет пару защитных дверец 316, установленных на петлях 318, которые могут быть установлены так, чтобы закрывать часть полости 314 (как показано стрелками W) или поворачиваться наружу для открывания части полости 314, как показано на фиг.27. Труба 312 также имеет закрывающую полость торцевую дверцу 320. Дверца 320 может иметь дефлектор воздушного потока 322 для защиты дверец 316, 320 и полости 314, усилительный стержневой растянутый элемент 324 и держатель пальца 326, удерживающий шарнирные пальцы 328 для ввода в шарнирные гнезда 331 на ближайших сторонах боковых стенок 332, определяющих часть полости 314. Дверца 320 поворачивается на пальцах 328 между открытым и закрытым положением. Стенки 332 также имеют шарнирные гнезда 334 для приема пальцев 306 отводного кронштейна 35.
Закрывающая полость дверца 320 также имеет гидравлически отводной палец 336 для перемещения в гнездо 338 и из него в кронштейне 340 дверцы 320, и отверстие 339 в базовом элементе 304. Дверца 320 также имеет параллельные ножки 342 с выровненными отверстиями 344. Стержень 308 отводного кронштейна 35 имеет вертикальный участок 346 с пазом 348, проходящим в стержне 308 в продольном направлении. Участок 346 идет между ножками 342, а скользящий палец 350 проходит через паз 348 и в каждое отверстие 344 для связи отводного кронштейна 308 с закрывающей паз дверцей 320. Гидравлический кронштейн 352 имеет ножки 354 с выровненными отверстиями 360 для прохождения между парой ножек 362 на концевой нижней поверхности 364 полости 314, ножки 362 с выровненными отверстиями 366, при этом ножки 354 удерживаются на месте пальцем.356 и проходят через отверстия 360 и 366. Другая пара параллельных ножек 368 идет от вала 369, идущего обычно вперед от кронштейна 352, а пара выровненных отверстий 370 принимает палец 371. Дверцы 316 открываются и закрываются гидравлическими или электромеханическими средствами согласованно с дверцей 320.
В предыдущей конструкции дверцы 316 и,320, показанные на фиг.27, блокируются в открытом положении, а головные элементы 302 каждого отводного кронштейна 35 остаются в соответствующих пазах 300 в ракете 18. Когда ракета 18 находится в состоянии свободного падения с тележкой 20 и становится невесомой по отношению к тележке 20, кронштейны 35 быстро отводят в соответствующие полости 314 вместе с остальной частью блока, работающего с кронштейнами 35, а дверцы 316 и 320 закрываются непосредственно перед зажиганием бустерного ракетного двигателя ракеты 18. Каждая ракета 18 может иметь небольшие наборы колес 372 для удержания ракеты 18 центрированной в трубе 312 во время пуска в случае, если направление силы тяги не точно коаксиально внутренней трубе тележки 20 или не проходит через центр масс ракеты.
Другая версия изобретения в дополнение к пуску ракет может использоваться в случае, если вверх необходимо поднять телескоп. На фиг.28 и 28А показана система удержания телескопа 373. На фиг.28А показан аэростат 160 в уменьшенной форме. Компоненты, связанные с телескопом, описываются ниже. Система 1 имеет три основных кабеля/троса 27, по которым передается электрическая энергия и которые крепятся к стыковочной станции 374. Стыковочная станция 374 имеет верхнюю часть 376, которая может вращаться в направлении стрелки Х по отношению к нижней части 378 при помощи вращательной приводной системы 379. Как показано на фиг.28В и 28С, вращающаяся приводная система 147 вращает верхнюю часть 376 и нижнюю часть 378 по отношению друг к другу при помощи кольцевой опоры 850, имеющей обращенный переформированный Г-образный элемент 852 в поперечном сечении, с наборами шаровых опор 854 и 856 в колеях 857, 858 и 859, 860 в верхней части 376 и Г-образным элементом 852, нижней частью 378 и Г-образным элементом 852 соответственно.
Верхние концы кабелей/тросов 27 удерживаются прочно, как показано на фигурах. Один кабель/трос 27А идет под углом через отверстие 862 в нижней части 378 и соответствующий зажимной механизм 864 для прочного удержания кабеля/троса 27А. Второй из кабелей/тросов 27 доказан как кабель/трос 27В и прочно удерживается соответствующими средствами на фланце 866, как дополнительно показано на фиг.28С. Третий из кабелей/тросов 27 удерживается прочно аналогичным образом. Двигатель 868 вращает зубчатое колесо 870. Зубчатое колесо 870 последовательно соединяется с зубьями 872 верхней части 376 для обеспечения указанного вращения, показанного стрелкой Y. В защитном кожухе могут быть заключен двигатель 868 и зубчатое колесо 870.
Могут использоваться три и больше реакционных толкателя 380, которые компенсируют взаимное вращение деталей 390 и 378, удерживаемых стационарно, когда для пуска ракет используется альтернативная пусковая система, показанная на фиг.28. Подобно другим стыковочным станциям, между верхней и нижней частями 376, 378 стыковочной станции 374 находится кольцевая опора 377 и вращательная приводная система 147. Вторичные кабели/тросы 184 также используются для передачи электрической энергии для работы электрических компонентов. Это может быть двухкабельная система постоянного тока или четырехкабельная трехфазная система.
Подъемное кольцо 382 перемещается вверх или вниз в направлении, показанном стрелками Z на кабелях/тросах 184. Подъемное кольцо 382 включает реверсивные фрикционные приводы 386 и конструкцию 387 для удержания тележки 20, которую можно поворачивать в направлении, показанном стрелкой АА и вращательным приводом 381 для изменения угла подъемного кольца 382 и тележки 20. Верхняя стыковочная станция 388 имеет верхнюю часть 390, которая обычно удерживается стационарно, и нижнюю часть 392, которая может вращаться в направлениях, показанных стрелками BB, вокруг вертикальной оси при помощи вращательного привода 381. Кольцевая опора 394 снижает трение от такого вращения. Минимум три реакционных толкателя 397 противодействуют вращению верхних частей 390 вокруг вертикальной оси.
Жесткий подъемный вал или подъемная труба 396 может нести специальные тележки 398, на каждой из которой устроен телескоп СС, до верхней опоры 399. Может также использоваться специальная легковесная тележка или тележки 20А для транспортировки тележки 20 до подъемной трубы 396 на опору 399 после переноса с подъемного кольца 382. Внутри подъемной трубы 396 может устанавливаться набор электрических кабелей или рельсов, по которым перемещаются колеса тележек 398 или 20А и которые будут передавать электрическую энергию (как в случае колес фрикционных приводов 26, касающихся кабелей/тросов 27), чтобы обеспечить транспортировку тележки 20А вверх и вниз внутри подъемной трубы 396. Аэростаты 160 крепятся к подъемной трубе 396 и окружают ее, как было описано ранее, чтобы обеспечить достаточное натяжение кабелей/тросов 184 для транспортировки подъемного кольца 382 со специальной тележкой 398, удерживающей внутри телескоп СС, а также удержания кабелей/тросов и аппарата, закрепленного на кабелях/тросах.
Верхняя опора телескопа 399 включает башенную платформу 402, на которой размещается поворотная платформа 404, которая вращается по отношению к стационарной верхней части 390. Принимающее телескоп отверстие 405 проходит через платформу 402 и поворотную платформу 404, как показано на фиг.28А и 29. Монтажные стенки 406 идут от поворотной платформы 404. Удерживающая телескоп конструкция или кольцо 408 зажимают специальную тележку 398 с находящимся в ней телескопом СС, причем центр тяжести тележки 398 располагается в центре кольца 408, который действует так же, как и подъемный блок 182, однако без фрикционных приводов. Как детально показано на фиг.29, кольцо 408 имеет коаксиальные шарнирные пальцы 410, входящие в гнезда 412 монтажных стенок 406. Предусмотрены монтажные стенки 406, кольцо 408 и шарнирные пальцы 410 для телескопической наклонной конструкции 411. Поэтому тележка 398 и установленный на ней телескоп СС может быть наклонен в поднятом положении в нужное положение, а вращение по азимуту, показанное стрелкой DD поворотной платформы 404 направляет тележку 398 и находящийся на ней телескоп СС в любом желаемом направлении. Поворотная платформа 404 и платформа 402 могут быть сделаны вращающимися независимо в соответствующих противоположных направлениях, показанных стрелками НН и II (фиг.28А, 29) по отношению к подъемной трубке 396. Это вращение обеспечивается вращательным приводом 383, подобным приводу 381. Платформа 402 может иметь радиальные регулируемые грузы, чтобы сделать ее вращательный момент инерции равным вращательным моментам инерции блока поворотной платформы 404 и частей на ней так, чтобы, когда они вращаются в противоположных направлениях, к подъемной трубе 396 не прикладывался эффективный крутящий момент, когда поворотная платформа 404 и части над ней вращаются.
Система пуска ракет 1 может использоваться для различных целей. Например, она может использоваться для пуска одного человека или базовой ракеты 601, имеющей двигатель управления направлением 603, как показано на фиг.30, который может перемещаться, как показано стрелками ЕЕ, для управления направлением перемещения ракеты 601. Показан человек или пассажир GG в заполненном жидкостью пусковом скафандре или скафандре для возврата в атмосферу 605 с сочленениями 607, заблокированным в оптимальном аэродинамическом вертикальном положении для пуска, и заблокированными ногами к верхней части ракеты 601 для сопротивления перегрузкам при разгоне ракеты 18 во время пуска. Скафандр 605 отсоединяется от ракеты 601 по желанию после прекращения работы ракеты 601, а сочленения скафандра разблокируются, чтобы позволить пассажиру GG свободно двигаться. Если скафандр должен использоваться для возврата на землю, часть жидкости, окружающей пассажира GG, может прокачиваться через пористые подушечки для охлаждения путем испарения внешней части скафандра для возврата в атмосферу 605 после входа в атмосферу, начиная с ног. (То же накачивание и охлаждающий эффект применяются также и при пуске). Ракета 601 со стоящим сверху пассажиром GG в скафандре 605 должна обеспечивать пассажиру GG прекрасный вид на этапе пуска. Аэродинамический обтекатель вокруг скафандра 605 может не потребоваться, кроме случая, когда он предусмотрен конструкцией, а набор сочленений 607 блокируется на месте, аэродинамическое сопротивление остается выше необходимого для оптимального пуска.
На фиг.31 показан возможный способ транспортировки туристов в скафандрах 605 или материалов в жестких капсулах 608, которые крепятся к стержневой ракете 604 с возможностью отсоединения. Основная ракета 601 прекращает контролируемый пуск через определенное время после пуска. Стержневая ракета 604 может отсоединяться от основной ракеты 601 после окончания контролируемого пуска основной ракеты 601. Для защиты туристов в скафандрах 605 или капсулах 608 от высокоскоростного воздуха может использоваться ветровое стекло 609, когда ракета 601 проникает через атмосферу на пути в космос, где скафандры 605 или капсулы 608 могут освобождаться в направлении, показанном стрелками JJ. Стержневая ракета 604 может иметь набор поворотного оперения 602, которое поворачивается в направлениях КК системой управления направлением движения ракеты 601.
На фиг.32 показана альтернативная капсула 610 с рамой возврата в атмосферу в виде салазок 616. Пассажир GG носит пусковой скафандр или скафандр для возврата в атмосферу 605. Рама возврата в атмосферу в виде салазок 616 включает оперение управления направлением движения 619 и воздушное острие 611. Воздушное острие 611 имеет удлиняемую конструкцию в виде антенны с диском 613, выполняющим роль переднего инициатора акустической волны для генерирования акустической волны 615 с целью снижения аэродинамического нагрева скафандра 605.
На фиг.33 показан скафандр для возврата в атмосферу человека GG, уложенный в более похожую на ракету по форме раму 617 с управляющим направлением оперением 618 и воздушным острием 611. Рама 617 имеет диск 613, описанный на фиг.32. В задней внутренней части рамы 617 может размещаться оборудование управления и отсек для хранения.
Подходящий космический скафандр 605 показан на человеке GG на фиг.34 и 35, который также предназначен для ослабления перегрузки. Космический скафандр 605 позволяет пассажиру GG выжить, остаться в сознании и быть способным оставаться активным в вертикальном положении в условиях высокого ускорения. Для дополнительных операций это достигается погружением пассажира в жидкость приблизительно той же плотности, что и тело, внутри жесткого скафандра с внешними электромеханическими или гидравлическими сочленениями постоянного объема с сервоусилителем. Космический скафандр 605 имеет шлем 650 (фиг.34, 34А, 34В, 36), окружающий голову человека GG, и жесткую внешнюю оболочку 648. Внутренний костюм 651 лежит близко к человеку GG, а внутренняя маска для защиты лица 653 с козырьком 655 герметично присоединена к внутреннему скафандру 651. Нетоксичная жидкость 656 (фиг.34, 34А-34В) заполняет пространство между жесткой внешней оболочкой 648 и внутренним скафандром 651. Если жидкость 656 нагреть до комфортной температуры, внутренний костюм 651 может не использоваться. Между внутренним скафандром 651 и маской для защиты лица 653 используется двойное уплотнение 654. Внутренний костюм 651 может облегать человека GG, а маска для защиты лица 653 может проветриваться от источника подачи воздуха через трубку подачи воздуха 661. На маске для защиты лица 653 космического скафандра 605 предусмотрен канал утечки 652 для слива воды в случае утечки в космос между двойным уплотнением, окружающим лицо человека GG. Вода или другая подходящая нетоксичная жидкость 656 заполняет пространство между внутренним скафандром 651 и внешней оболочкой 648, маской для защиты лица 653 и козырьком 655, как показано на фиг.34, 34А и 34В. Человек GG в космическом скафандре 605 может поворачивать голову в шлеме 650, будучи подвешенным в воде 656. Космический скафандр 605 представляет собой жесткую легковесную конструкцию, однако в маске для защиты лица 653 или козырьке 655 могут быть предусмотрены объемные датчики воздушного потока для направления гидравлического или электромеханического приводного поршня (описываемого ниже), перемещаемого внутрь и наружу для компенсации изменения объема во время дыхания. Дополнительно для компенсации частоты дыхания, т.е. изменения объема, разделенного на изменение во времени, датчики давления в различных точках (в частности возле груди) в космическом скафандре 605 поддерживают постоянство давления жидкости путем поднимания и опускания поршня. Использование внешнего гидроусиления высокого давления для того, чтобы человек GG мог свободно перемещаться в скафандре 605 в условиях перегрузки, например, во время пуска или возврата в атмосферу, исключает возможность выхода воды или другой гидравлической жидкости, используемой для активации соединений скафандра, внутрь скафандра, что могло бы привести к раздавливанию человека GG.
Поршень также показан на фиг.35. На этом изображении скафандр 605 имеет воду (или нетоксичную жидкость с плотностью, приближающейся к плотности человеческого тела) 656, заполняющую скафандр вокруг человека GG, и поршень 657 перемещается внутрь и наружу из цилиндра 660 под действием гидравлической жидкости под высоким давлением или путем прямого приведения поршня 657 в движение при помощи электромеханического аппарата для изменения объема в скафандре 605, требующегося для нормального дыхания.
Жесткая внешняя оболочка 648 имеет конструкцию, типичную для скафандра 605, показанного на фиг.34, и показана на фиг.36. Жесткая внешняя оболочка 648 скафандра 605 включает пару жестких рукавов, каждый их которых имеет внутренние рукава 664 (показан только один), каждый из которых сделан из открытой, эластичной сетки или мягкого пенистого материала с открытыми порами, и пару жестких ног, каждая из которых имеет внутренние ноги той же конструкции, что и внутренние рукава 664. Внутренние рукава и внутренние ноги далее именуются "внутренние рукава". Поры должны быть достаточно большими, чтобы не оказывать существенного препятствия протеканию воды через рукав 664. Рукав 664 удерживается по центру внутри скафандра 605 при помощи слабых эластичных натяжных элементов 668, прикрепленных к одному концу скафандра 605, которые проходят через рукав 664 и крепятся к рукаву 664 и проходят по касательной к нему, к которому они крепятся на другом конце. Натяжения эластичных натяжных элементов 668 воспринимаются датчиками и используются для обеспечения обратной связи для управления механическими сочленениями скафандра 605 с целью зеркального отражения перемещений человека GG с удержанием его по центру скафандра. Человек GG просто сползает в скафандр 605, а его тело скользит в типичном рукаве 664. Скафандр 605 - это практичный и эффективный космический скафандр, который носит человек GG на ракете 601 или внутри ракеты 18, особенно во время пуска, ускорения и возврата в атмосферу. Внешняя оболочка 648 может иметь абляционный внешний материал с изоляцией и термоизоляцию.
Другие версии ракеты показаны на фиг.37, 38, 38А и 39. Ракета 700 имеет воздушно-космический самолет 702 с развернутыми и сложенными конструкциями управления подъемом и направлением движения 704, прикрепленным к корпусу, показанные на фиг.37, 38 и 38А, и складываемыми в направлениях, показанных стрелками LL и MM. Транспортное средство для возврата в атмосферу типа подъемного тела 706 показано в сложенном пусковом виде на фиг.38 с конструкциями управления подъемом и направлением движения 704 в сложенном состоянии. Транспортное средство для возврата в атмосферу типа подъемного тела 706 с конструкциями управления подъемом и направлением движения 704, складываемыми в дополнительном направлении, показанном стрелками NN, показано на фиг.38А в сложенном и разложенном состоянии. Ракета 700 первоначально является военной версией ракеты 18.
На фиг.39 показана более типичная ракета 720. Ракета 720 включает спутник или другую полезную нагрузку 722, которая защищена во время пуска и полета парой одноразовых аэродинамических оболочек 724. После того как ракета 720 оставляет атмосферу, оболочки 724 автоматически отсоединяются в показанных стрелками РР направлениях и предпочтительно падают обратно на землю, а спутник или другая полезная нагрузка 722 уходит в космос. Ракета 720 первоначально является коммерческой версией ракеты 18.
Описанный выше предпочтительный вариант осуществления может быть реализован с использованием существующих в настоящее время материалов и изделий. Типовая тележка, загруженная ракетой, по оценкам, может весить 80 тонн, однако возможен и больший вес. Каждый кабель/трос должен быть прочным и электропроводным. Он также должен быть износостойким, чтобы выдерживать перемещение ведущих колес вверх и вниз по кабелям/тросам. Таким образом, кабели/тросы 27 и 184 должны иметь стальную внешнюю часть, алюминиевую промежуточную часть и стальную сердцевину. Кабели/тросы должны быть многожильными с медными и стальными жилами, а также стальными жилами с медным покрытием или иметь другую подходящую конструкцию. Для подъема 70 тонн кабели/тросы должны иметь диаметр примерно 2/3 дюйма. Каждый из трех кабелей/тросов может иметь диаметр 1,25 дюйма, а каждый вторичный кабель/трос должен иметь диаметр в один дюйм.
Как упоминалось ранее, вес кабелей/тросов предпочтительно должен иметь периодическую компенсацию. Стальные кабели/тросы, имеющие диаметр 1,125 дюймов, весят около 2,03 фунтов на фут. Необходимо использовать запас прочности не меньше пяти. Кабель/трос диаметром один дюйм удерживает вес 120 тонн на пределе прочности.
Предпочтительным газом для аэростатов должен быть водород, который гораздо более плавучий, чем гелий, и может быть генерирован из воды, тогда как ограниченные поставки гелия в основном добывают из месторождений природного газа. Тем не менее, безопасность является важным фактором. Чем дальше в атмосферу уходят аэростаты, тем больше повышается опасность удара молнии. Поэтому поворотный, подъемный блок и компоненты над всеми ими необходимо изолировать с земли, электрически зарядить до того же электрического потенциала, что и высотная атмосфера, чтобы избежать привлечения молнии, а также индуктивно подключить источник электроэнергии. Изолирующие части системы пуска ракет предпочтительно могут быть выполнены из керамики или стекла.
Оболочка аэростатов должна быть легкой, прочной и стойкой к ультрафиолетовому (УФ) излучению. Недавно была проделана большая работа над этими оболочками в конструкции и работе дирижаблей и других аэростатов.
Преимущества системы пуска ракет по настоящему изобретению по сравнению с используемыми на данный момент вполне очевидны. Первая ступень ракет Сатурн V, запущенных НАСА, потребила 203000 американских галлонов RP-1 (очищенного керосина) и 331000 американских галлонов жидкого кислорода (LOX) за 2,5 минуты. Настоящее изобретение позволяет значительно снизить количество топлива для подъема той же полезной нагрузки за счет подъема большого количества меньших ракет при помощи электроприводных тележек с эквивалентной полезной нагрузкой вверх по кабелям/тросам, удерживаемым аэростатами, на нужную высоту перед пуском. В существующем уровне техники используется огромное количество невозобновляемой энергии из ископаемого топлива. Например, корабль Virgin Galactic White Knight Mothership использует тонны керосина JET-A-1 для выхода на пусковую высоту для Space Ship Two, который использует вид резины с жидким окислителем, дающий черный сажеобразный выхлоп. Твердотельные ускорители часто оставляют фтористые и хлористые соединения и частично-сгоревшие углеводороды среди прочих опасных остатков в выхлопе. Все эти выхлопы и остатки загрязняют атмосферу. С другой стороны, энергия, используемая для подъема тележек в предпочтительной форме настоящего изобретения, получается из возобновляемых источников, и значительная ее часть рекуперируется, когда фрикционные приводы переключаются в режим рекуперации, когда тележка возвращается вниз по кабельному/тросовому пути.
Кроме того, настоящее изобретение значительно снижает стоимость полета в космос для удаления отходов на орбите вокруг нашей планеты и даже для строительства орбитальной ремонтной базы. Живым примером опасных орбитальных отходов в космосе было столкновение неиспользуемого российского телекоммуникационного спутника Космос 2251 с американским спутником мобильной связи, принадлежащим Iridium 11 февраля 2008 года. Каждый спутник перемещался с орбитальной скоростью 17500 миль в час. Отходы от этого столкновения оценивались в объеме 500 кусков. НАСА заявила, что эти отходы от столкновения повышают опасность столкновения с Международной космической станцией. Международное объединение продвижения космической безопасности предложило обязательно удалить неиспользуемые спутники.
Таким образом, настоящее изобретение включает ряд кабелей/тросов, удерживаемых аэростатами, которые могут очень эффективно использоваться для различных целей. При использовании для пуска ракет количество топлива, требуемого для пуска, существенно снижается, потому что ракеты транспортируются в верхние слои атмосферы до запуска их двигателей. Использование ракет для различных целей и благодаря сниженному потреблению энергии и соответственно снижению расходов на такие применения, как развлекательный спорт с использованием ракет, парашютов, небольших реактивных двигателей или других аппаратов, может быть экономически выгодным. Аналогичным образом, системы для обслуживания спутников становятся более выполнимыми и экономными. Использование на высотных платформах, например, для телескопов, может быть чрезвычайно выгодным для ученых.
В описанном выше предпочтительном варианте осуществления предусмотрено три кабеля/троса для трехфазного электропитания. Вполне вероятно, что каждый кабель/трос будет передавать точно одну треть электричества. В случае если этого сделать невозможно или, если есть возможность, это может быть сделано во время использования системы пуска ракет по настоящему изобретению, необходимо предусмотреть конструкцию либо в виде нейтральной линии, либо заземления для достижения необходимого электрического равновесия между каждым из трех кабелей/тросов.
Настоящее изобретение имеет много применений в дополнение к описанным выше. Существует огромное количество мусора, летающего по орбите вокруг земли от множества находящихся в космосе ракет. По оценкам НАСА в 2009 году сетью станций наблюдения за космическим пространством США отслеживается около 14000 объектов. Многие из этих объектов угрожают другим устройствам, которые могут проходить через соответствующие орбиты этих объектов, потому что столкновения могут привести к значительным повреждениям. Настоящее изобретение может использоваться для размещения уловителей мусора на орбите для удаления и выведения с орбиты такого мусора экономным и безопасным образом, либо повторного использования таких предметов, которые могут подвергаться повторной переработке для создания полезных конструкций на орбите.
Описанные в настоящем документе кабели/тросы представляют собой обычный трос, состоящий из скрученных металлических жил и показанный как скрученный в спираль. Это - проволочные тросы, которые являются электропроводными, подобные тем, которые используются в вагонах канатных дорог, фуникулерах и подъемниках. Описаны также различные варианты кабелей/тросов. Однако, термин "кабель/трос" не ограничивается проволочными тросами. Кабелями/тросами могут быть стержни различного сорта, в виде отдельных участков, соединенные различными типами сварки, или ряд небольших звеньев, которые сочленяются между собой для достижения необходимой длины. Важными характеристиками любого используемого кабеля/троса по настоящему изобретению является прочность, электропроводность и способности принимать напряжения и растяжения, которые существуют на больших высотах, для транспортировки устройств транспортировки ракет и других аппаратов, описанных в настоящем документе. Эти стержни или другие типы кабелей/тросов могут модифицироваться в различных аспектах, например, для изменения поверхности или конфигурации поверхности стержней или других кабелей/стержней, чтобы система работала более эффективно, когда стержни или другие кабели/тросы взаимодействуют с фрикционными приводами соответствующих устройств транспортировки ракет. Такие стержни могут иметь цилиндрическое поперечное сечение или другие поперечные сечения в зависимости, например, от характера используемых фрикционных приводов. На фиг.40 и 41 на стержне 990 показаны соединительные фланцы 992, присоединяемые на стыках 994. На фланцах имеются крепежные отверстия 996, необходимые для присоединения разделителей на другие конструкции сбоку на стержни, чтобы можно было выполнять болтовые и другие соединения. Они могут крепиться путем склеивания, сварки в твердой фазе и других видов сварки (например, сварки трением, сварки взрывом, пайки и т.п.) либо сочленения, как будет признано целесообразным. Стержни могут модифицироваться иначе в зависимости от таких факторов, как характер соединения соответствующих стержней, электропроводности стержней, безопасности стержней и т.п.
Изобретение было детально описано с особой ссылкой на его предпочтительный вариант осуществления. Однако возможны вариации и модификации в пределах сущности и объема настоящего изобретения для специалистов в данной области на основании приведенного выше материала и прилагаемых пунктов формулы изобретения.
Реферат
Изобретение относится к системе доставки различных видов полезной нагрузки в верхние слои атмосферы и выше. Система пуска ракет (1) включает трубчатую тележку пуска ракет (2) с фрикционными приводами кабельного/тросового пути (26), перемещаемую ниже двухосевого шарнира (63), прикрепленного к земле, поднимаемую в коаксиальную переносную трубу (124, 143), ведущую к трем основным привязным кабелям/тросам (27), вес которых компенсируется аэростатами (164). Тележка затем перемещается на стыковочную станцию (166), удерживаемую над землей в стратосфере парой вторичных кабелей/тросов (184), подвешенных под крепежной рамой (162) для натяжения аэростатов. Тележка удерживается концевым захватом тележки (196), направляемым по двум вторичным и двум третичным кабелям/тросам (186), и поднимаемым нижним подъемником (198), направляемым вторичными кабелями. Этот нижний подъемник удерживается верхним подъемником (168), подвешенным на крепежной раме натяжных аэростатов. Тележка, зацепляющаяся за подъемное кольцо (183), направляющееся по двум вторичным кабелям/тросам, поднимается дальше, вращается в необходимом направлении, со сбросом ракеты и практически безоткатным выбросом во время свободного падения тележки вниз и зажиганием двигателя на безопасном расстоянии. В результате создана пусковая установка для частой, безопасной и экологически чистой отправки полезных грузов в космос. 49 з.п. ф-лы, 67 ил.
Формула
набор линий электропередач для передачи электрической энергии от удаленной системы электропитания на земле, при этом электрическая энергия может постоянно извлекаться вдоль указанного набора линий электропередач, причем указанные линии электропередач имеют нижний конечный участок для расположения на низкой высоте и верхний конечный участок для подъема на большие высоты;
набор линий устройства транспортировки ракеты для транспортировки устройства транспортировки ракет между низкой высотой и большой высотой, причем указанные линии устройства транспортировки ракеты имеют нижний конечный участок для расположения на низкой высоте и верхний конечный участок для подъема на большие высоты;
вторичные линии, функционально присоединенные к указанному набору линий электропередач и к указанному набору линий устройства транспортировки ракеты для расположения на больших высотах, чем большие высоты указанных линий электропередач и указанных линий устройства транспортировки ракеты;
функциональные конструкции, функционально присоединенные к указанным вторичным линиям для выполнения функций указанной системы пуска ракет;
аэростаты, присоединенные к указанным наборам линий электропередач и указанным линиям устройства транспортировки ракет для удержания указанных наборов линий электропередач и указанных линий устройства транспортировки ракет вверх на большой высоте, и
натяжные аэростаты, присоединенные к указанным вторичным линиям для передачи натяжения указанным вторичным линиям, когда указанные линии электропередач и указанные линии устройства транспортировки ракет находятся на большой высоте над землей.
пара указанных третичных кабелей/тросов находится с противоположных сторон указанного трубчатого подъемного кольца; и
указанный блок поворота тележки включает:
вращательную приводную систему, функционально присоединенную к указанному трубчатому подъемному кольцу для вращения указанного подъемного кольца;
направляющие подъемного кольца, функционально присоединенные к указанным третичным кабелям/тросам; и
шарнирные пальцы, присоединенные к указанному трубчатому подъемному кольцу и идущие от трубчатого подъемного кольца, причем указанные шарнирные пальцы шарнирно прикреплены к каждой из указанных направляющих подъемного кольца; и
указанная вращательная приводная система вращает указанное трубчатое подъемное кольцо для поворота вокруг указанных шарнирных пальцев для изменения угла места указанного трубчатого подъемного кольца и любой из указанных тележек, принимаемых на нем; и
центр тяжести указанного трубчатого подъемного кольца попадает в геометрический центр указанного трубчатого подъемного кольца, при этом указанный центр тяжести совпадает с осью указанных шарнирных пальцев.
основание поворотной платформы; и
башенный блок, установленный на указанном основании поворотной платформы, при этом нижний концевой участок указанного набора основных силовых и транспортировочных кабелей/тросов присоединяется к указанному башенному блоку, и транспортировочную конструкцию для транспортировки соответствующих устройств транспортировки ракет с указанного башенного блока и на него вдоль указанных основных кабелей/тросов.
вращающуюся поворотную платформу, вращающуюся по отношению к указанному основанию поворотной платформы, причем указанная поворотная платформа имеет отверстие вращающейся поворотной платформы для приема соответствующих устройств транспортировки ракет;
нижнюю направляющую трубу, установленную на указанной вращающейся поворотной платформе, причем указанная нижняя направляющая труба имеет отверстие нижней направляющей трубы, которое может выравниваться с указанным отверстием вращающейся поворотной платформы и имеет размер, соответствующий указанному отверстию вращающейся поворотной платформы; указанная нижняя направляющая труба принимает соответствующие устройства транспортировки ракет, при этом нижняя направляющая труба включает направляющую конструкцию нижней направляющей трубы для размещения соответствующих устройств транспортировки ракет в указанном отверстии нижней направляющей трубы;
вторичную направляющую конструкцию, включающую цельную трубу, имеющую отверстие трубы, и вторичные направляющие конструкции, которые могут выравниваться с указанной направляющей конструкцией нижней направляющей трубы для присоединения указанных основных кабелей/тросов к вторичной направляющей конструкции; и
вращающийся блок для вращения указанной нижней направляющей трубы по отношению к указанной вторичной направляющей конструкции для выравнивания указанного отверстия нижней направляющей трубы и указанного отверстия цельной трубы, и для выравнивания направляющей конструкции нижней направляющей трубы и указанной вторичной направляющей конструкции;
указанная вращающаяся поворотная платформа, вращающая указанную нижнюю направляющую трубу и указанную вторичную направляющую конструкцию в нужном направлении для перемещения указанного устройства транспортировки ракет.
гидравлический цилиндр;
гидравлический поршень, функционально расположенный внутри гидравлического цилиндра;
шток гидравлического поршня, присоединенный к указанному гидравлическому поршню и перемещаемый в осевом направлении по отношению к указанному гидравлическому цилиндру;
верхний поворотный блок, функционально установленный на указанном гидравлическом поршне, для приема соответствующих устройств транспортировки ракет и выравнивания устройств транспортировки ракет с указанным отверстием вращающейся поворотной платформы; и
вращательный привод для вращения указанного верхнего поворотного блока.
верхний поворотный блок принимает соответствующие устройства транспортировки ракет с боковых транспортировочных устройств, имеющих набор колес бокового транспортировочного устройства, а указанный участок стола связан с колеями, выровненными с набором колес бокового транспортировочного устройства для обеспечения возможности приема боковых транспортировочных устройств на указанном участке стола указанного подъемного блока.
поперечный загрузчик, перемещаемый по отношению к соответствующим отсекам сборки;
набор колей, по которым перемещается соответствующий поперечный загрузчик; и
направляющий блок для направления указанного поперечного загрузчика и компонентов указанного поперечного загрузчика.
колесные вагонетки, которые могут перемещаться по указанному набору колей и перемещения указанного поперечного загрузчика вдоль указанного набора колей; и
рельсы, идущие поперек указанного поперечного загрузчика, при этом указанный подъемный блок может перемещаться вдоль указанный рельс.
направляющий опорный аппарат, установленный на указанной колесной вагонетке подъемного блока и идущий в вертикальном направлении; и
подъемник, функционально связанный с указанным направляющим опорным аппаратом, при этом указанный подъемник имеет электромеханические конструкции для перемещения указанного подъемника по указанному направляющему опорному аппарату;
указанный подъемный блок, поднимающий ракеты и тележки с указанных стеллажей для хранения и опускания соответствующих ракет и тележек на соответствующие указанные отсеки сборки, и указанный переносной загрузчик, перемещающий соответствующие ракеты и тележки между указанными стеллажами и указанными отсеками сборки.
Комментарии