Система управления огнем нескольких снайперов - RU2498191C1
Код документа: RU2498191C1
Чертежи
Описание
Тактика применения снайперского оружия в антитеррористических и армейских операциях предполагает необходимость синхронного залпового выстрела из нескольких снайперских винтовок. Имеют место случаи, когда группа террористов своими действиями угрожает жизни заложнику (группе заложников), террорист-смертник с взрывчаткой на собственном теле готов произвести самоподрыв, проводится армейская операция. Нейтрализация действий противника, в подобных случаях, возможна при синхронном поражении всех членов террористической группы или синхронном поражении некоторых частей тела террориста-смертника, инициирующих самоподрыв, или при точном поражении укрытия вражеского снайпера высокоточным боеприпасом. Помимо прочего, синхронные источники звуков маскируют позиции снайперов. Заявленные результаты возможно получить, если максимально нейтрализовать субъективные факторы, влияющие на синхронность залпа, и максимально учесть объективные факторы, влияющие на точность поражения. К первой группе факторов можно отнести индивидуальные психофизические характеристики каждого стрелка, такие как физическая готовность к выстрелу (сосредоточенность) и время между получением вербальной команды на открытие огня и моторной реакцией стрелка. Ко второй группе относятся факторы, влияющие на траекторию полета пули - расстояние до цели, температура и плотность воздуха, направление и сила ветра на траектории полета. Корректировка траектории полета высокоточного боеприпаса (управляемого снаряда или ракеты) возможна в течение всего полетного времени при использовании передачи данных по радиоканалу.
Известно устройство для автоматизированного прицеливания и выстрела из стрелкового оружия состоящее из оборудования, размещаемого на самом оружии и в экипировке стрелка. На оружии размещается видеокамера, датчик крена оружия, лазерный дальномер с излучателем и двумя фотоприемниками, аналого-цифровой преобразователь, передатчик, приемник, антенны, электромагнит с якорем, электронный ключ и блок питания.
В экипировку стрелка входят антенны, приемник, передатчик, датчики температуры и давления воздуха, устройства обработки видеосигнала, принятия решения и иные логические устройства, устройство оценки поперечной скорости ветра, формирователь точки прицеливания и видеомонитор, установленный на шлеме стрелка.
По первому варианту передача информации с оружия на комплект стрелка осуществляется электроиндукционным способом с выходного резонансного контура, выполненного печатным монтажом на прикладе оружия, на аналогичный входной резонансный контур, расположенный на ладонной стороне перчатки стрелка. Далее по кабелю сигналы подаются на комплект оборудования, установленного на теле стрелка. По второму варианту оборудование, размещенное на оружии, связано единым кабелем с оборудованием, размещенным на теле стрелка; отсутствует блок анализа скорости поперечного ветра, а поправка точности попадания математически выводится из анализа полета трассирующей пули, выпущенной стрелком. Инициация выстрела по второму варианту - электрическая, подрыв капсюля патрона производится высоковольтным разрядом. Для чего в стальной корпус затвора устанавливается несколько диэлектрических втулок для обеспечения электрической изоляции патрона от корпуса затвора и применяется специальный боеприпас, в котором капсюль от гильзы отделен диэлектрической втулкой [1].
Предлагаемый принцип действия таков, что устройство вычисляет поправку прицела, используя показания датчиков крена оружия, давления, температуры, результат анализа разности максимумов отражений лазерного луча в фотоприемниках, оценивает скорость движения цели по изменению изображения в кадре и выдает на экран монитора точку прицеливания и точку попадания. Стрелок управляет оружием как пространственным манипулятором - совмещает на экране светящиеся точки, и комплекс автоматически открывает огонь.
У данного комплекса существуют значительные недостатки, а именно:
1. Заявлена возможность оценки скорости поперечного ветра через вычисление времени между максимумами амплитуд отраженного лазерного луча в двух фотоприемниках. Физический принцип и математический аппарат обработки показаний фотодатчиков, заявленный авторами, не соответствует известным методам измерений поперечной скорости газовых потоков с взвешенными частицами [2] [3]. Оборудование, построенное по известным методам, требует прецизионной настройки и имеет вес в несколько десятков килограмм. Известно применение оборудования лазерной анемометрии только в некоторых моделях танковых баллистических вычислителей.
2. Заявленные авторами кабельный или индукционный способы передачи информации от оборудования, установленного на оружии, на оборудование, установленное на теле стрелка, ограничивают подвижность последнего.
3. Предполагается изготовление затвора оружия в виде нескольких коаксиальных цилиндров из стали и диэлектрика - материалов с различными коэффициентами теплового расширения.
4. Существенным недостатком аналога является применение специального боеприпаса - патрона с гильзой, где капсюль отделен от гильзы диэлектрической втулкой.
5. По второму варианту корректировка точности попадания производится путем математического анализа траектории движения трассирующей пули, т.е. тактика применения комплекса подразумевает стрельбу только очередями.
Известна система корректировки наводки оружия для снайпера или разведчика, состоящая, в различных вариантах компоновки, из оптического телескопического прицела, видоискателя, лазерного дальномера (целеуказателя), баллистического вычислителя, метеостанции(й) с датчиками, лазерного определителя "свой-чужой", ручной клавиатуры для ввода данных [4]. В варианте компоновки для снайпера баллистический вычислитель собирает данные от лазерного дальномера, метеостанции и отображает величину необходимых поправок прицела на дисплее видоискателя. Дисплей располагается внутри оптического прицела винтовки или на отдельном мониторе.
Стрелок вручную корректирует прицел, согласно видимым поправкам, или оборудование имеет механизм автоматической корректировки изображения перекрестья (трафарета). Имеющаяся ручная клавиатура позволяет стрелку вводить/игнорировать дополнительные поправочные данные. Заявлено, что данная система дает повышение точности за счет максимального учета внешних факторов, влияющих на точность. Недостатками вышеизложенного изобретения является отсутствие координации работы нескольких снайперов, авторами не раскрыта техническая реализация и промышленная применимость заявленного изобретения.
Наиболее близким к заявленному изобретению является система видеонаблюдения и группового поражения цели состоящая из нескольких единиц стрелкового оружия с оптическими прицелами, на каждое из которых дополнительно установлены видеокамера и передатчик видеосигнала, причем видеокамера снимает изображение, видимое снайпером в прицел, и передает видеосигнал на вход передатчика. Передатчик связан с приемником по радиоканалу. Приемники видеосигнала и видеоконтрольное устройство расположены на командном посту (центральном посту) руководителя операции [5].
Авторами заявлен положительный результат применения подобной модели, приведены примеры. Во всех примерах оператор (руководитель операции) наблюдает на видеоконтрольном устройстве изображение, видимое стрелками в окуляры прицелов. Анализируя изображение, оператор вербально, по каналу радиообмена, осуществляет руководство действиями каждого снайпера по изменению ракурсов наблюдаемого изображения и принимает решение о применении общего залпа или выборочного залпа несколькими стрелками или о корректировке наведения артиллерии. Далее, по каналу радиообмена, оператор вербально передает необходимые команды па открытие огня.
Данная модель имеет следующие недостатки, а именно: отсутствие инструментального вычисления поправок прицелов, имеется интенсивный вербальный радиообмен между стрелками и оператором. Модель принципиально не имеет возможности учитывать влияние внешних факторов и индивидуальных психофизических характеристик каждого стрелка на синхронность производства залпового выстрела и точность поражения цели.
Заявленное изобретение охарактеризовано признаками формулы изобретения.
Целью заявленного изобретения является: 1) повышение точности поражения цели, 2) синхронное поражение нескольких целей, 3) проведение армейских снайперских операций, 4) противодействие акустической системе обнаружения снайпера. Практической стороной применения предлагаемого изобретения могут стать армейские снайперские операции и антитеррористические силовые операции, где необходимо синхронно поразить несколько целей. Вариант 1 - силовая операция по освобождению заложников, для жизни и здоровья которых существует реальная угроза. Вариант 2 - нейтрализация действий террориста-смертника готового произвести самоподрыв, путем синхронного поражения значимых органов. Вариант 3 - вычисление координат цели и корректировка траектории боеприпаса высокоточного оружия для поражения цели. Вариант 4 - противодействие акустическим системам обнаружения снайпера.
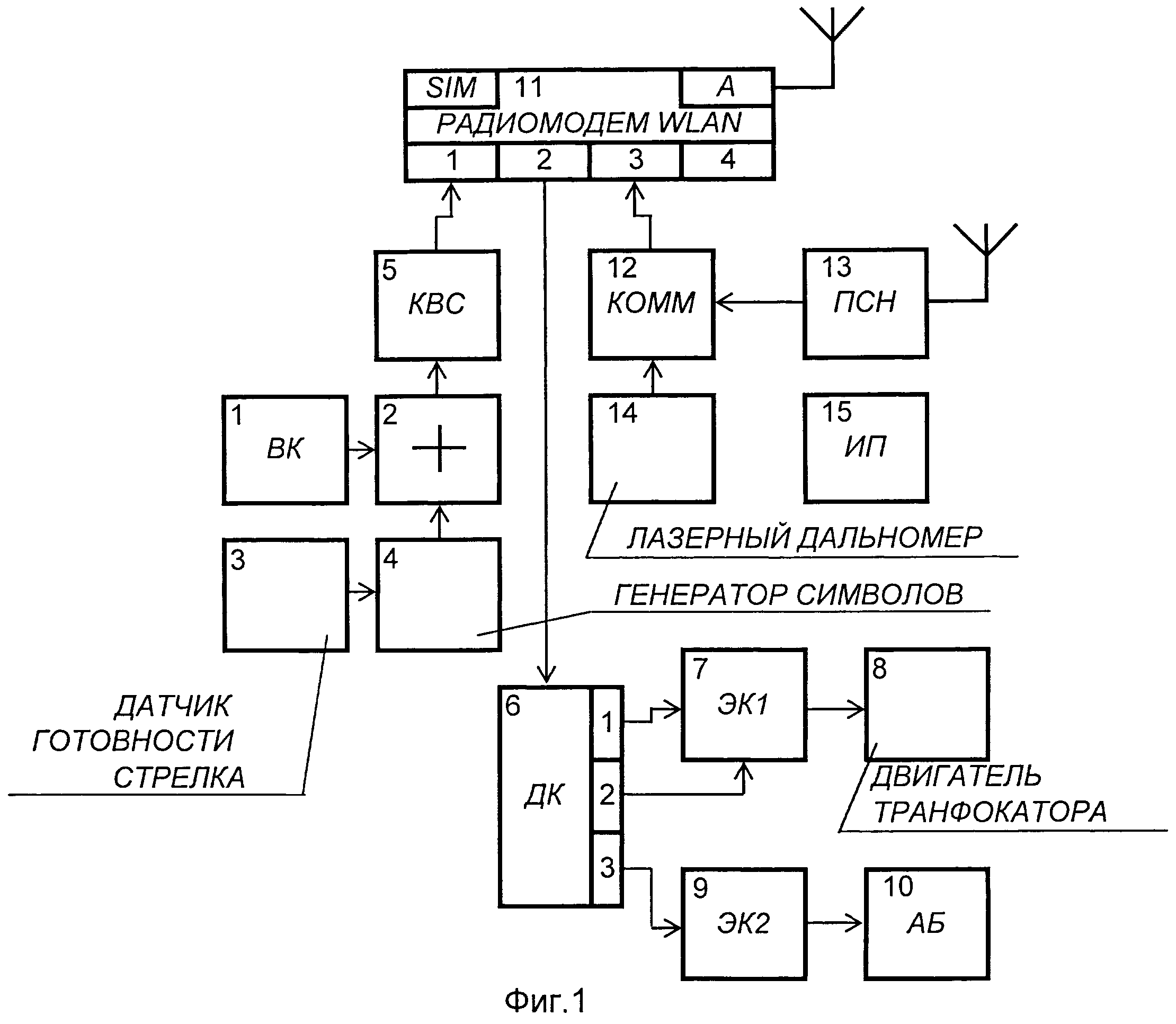
Для достижения поставленных целей предлагается стрелковый снайперский комплекс, который содержит несколько индивидуальных комплектов (ИК), один комплект оборудования мобильного ретранслятора и один комплект оборудования мобильного центрального поста (ЦП). Каждый ИК состоит из радиосредства для вербального обмена и снайперской винтовки с оптическим прицелом. В первом варианте, оборудование, установленное на винтовку, содержит (фиг.1):
1) модуль лазерного целеуказателя (ЛЦ) (не показан), корпус которого механически связан с механизмом внесения поправок оптического прицела и оптическая ось которого совмещена с оптической осью прицела,
2) видеокамеру (ВК) 1 с цифровым выходом, автодиафрагмой, автофокусом и управляемым трансфокатором,
3) устройство сложения 2,
4) сенсорный датчик 3 готовности стрелка,
5) генератор символов 4,
6) устройство компрессии 5 цифрового видеосигнала (КВС),
7) дешифратор команд (ДК) 6,
8) первый электронный ключ (ЭК1) 7 и двигатель трансфокатора 8,
9) второй электронный ключ (ЭК2) 9,
10) электромагнит 10 электромеханического устройства активации бойка (АБ),
11) модуль радиомодема (РМ) 11 широкополосной цифровой связи с четырьмя портами ввода-вывода, с антенной и разъемом для подключения SIM-карты,
12) коммутатор (КОММ) 12,
13) модуль приемника 13 спутниковой навигации (ПСН) с антенной,
14) лазерный дальномер с фотоприемником 14,
15) источник питания (ИП) 15,
16) сошки (не показаны).
Конструктивно корпус ЛЦ механически жестко связан с корпусом оптического прицела, оба управляются единым механизмом внесения поправок, и оптическая ось прицела совпадает с оптической осью целеуказателя. В конструкцию ударно-спускового механизма винтовки вводится устройство электромеханической активации бойка, и на спусковой крючок устанавливается сенсорный датчик готовности стрелка. Сенсорный датчик подключен к цифровому генератору символов, выход которого и цифровой выход ВК подключены на два входа устройства сложения видеосигналов. Выход устройства сложения подключен к входу КВС, выход которого подключен к первому порту РМ. ЭК1 подает инверсное напряжение от ИП на двигатель трансфокатора, управляющие входы ЭК1 подключены к первому и второму выходам ДК. Электромагнит привода АБ подключен к выходу ЭК2, вход которого подключен к ИП, а управляющий вход - к третьему выходу ДК. Вход ДК подключен ко второму порту РМ. К третьему порту РМ подключен выход коммутатора, к первому входу которого подключен выход ПСН, а ко второму входу - выход лазерного дальномера. Дальномер определяет расстояние до цели, фиксируя в фотоприемнике импульсы отраженного луча ЛЦ.
Коммутатор с заданной частотой коммутирует потоки данных от дальномера и ПСН.
В разъем РМ установлена SIM-карта с занесенным в нее собственным абонентским номером и одним из N номеров РМ центрального пульта.
Применение сошек (двойных, тройных) необходимо для жесткого крепления корпуса винтовки к поверхности земли. Это необходимо для устранения мелких подвижек изображения в кадре, устранения эффекта дрожания точки лазерного луча, уменьшения влияния реактивных импульсов при производстве выстрела. Комплект мобильного ретранслятора представляет собою типовое коммутационное оборудование базовой станции цифровой широкополосной связи на мобильной платформе (не показан).
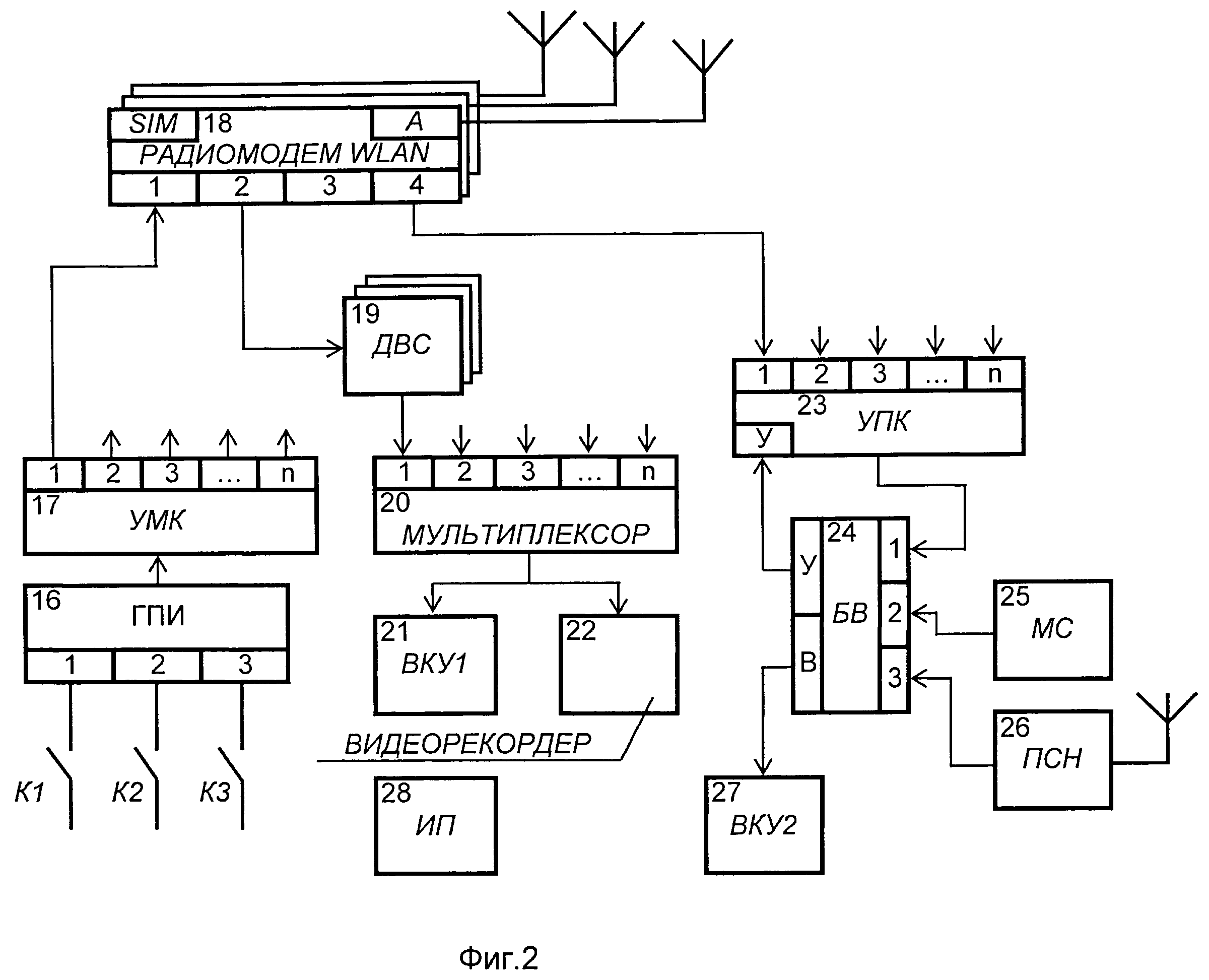
В первом варианте оборудование мобильного ЦП (фиг.2) содержит:
1) первый ключ (К1),
2) второй ключ (К2),
3) третий ключ (К3),
4) управляемый генератор прямоугольных импульсов (ГПИ) 16,
5) управляемый матричный коммутатор "1×N" (УМК) 17 (здесь, и далее: "1×N" - "один вход - N выходов", "N×1" - "N входов - 1 выход").
6) N модулей радиомодема (РМ) широкополосной цифровой связи с четырьмя портами ввода-вывода, с антеннами и разъемами для подключения SIM-карты 18,
7) N устройств декомпрессии цифрового видеосигнала (ДВС) 19,
8) мультиплексор "N×1" 20,
9) первое видеоконтрольное устройство (ВКУ1) 21,
10) записывающее устройство с генератором даты/времени 22,
11) управляемый последовательный коммутатор (УПК) "N×1" 23,
12) модуль баллистического вычислителя (БВ) 24,
13) модуль метеостанции (МС) 25 с датчиками температуры, давления, влажности, направления и силы ветра,
14) модуль приемника 26 спутниковой навигации (ПСН) с антенной,
15) второе видеоконтрольное устройство (ВКУ2) 27,
16) источник питания (ИП) 28.
К1, К2, К3 подключены, соответственно, к первому, второму и третьему входам ГПИ, выход которого подключен к входу УМК. Каждый из N выходов УМК подключен к первым портам РМ, в соответствии с порядковыми номерами. Ко вторым портам РМ подключены входы ДВС, выходы которых подключены к входам мультиплексора, в соответствии с порядковыми номерами, к выходу последнего параллельно подключены вход ВКУ1 и вход записывающего устройства с генератором даты/времени. К четвертым портам РМ подключены входы УПК, в соответствии с порядковыми номерами, выход УПК подключен к первому входу БВ. Ко второму и третьему входам БВ подключены выход МС с вышеперечисленными датчиками и выход ПСН. К видеовыходу БВ подключен вход ВКУ2. Управляющий выход БВ подключен к входу управления УПК. В разъем каждого из N радиомодемов широкополосной цифровой связи установлена SIM-карта с записанным адресом.
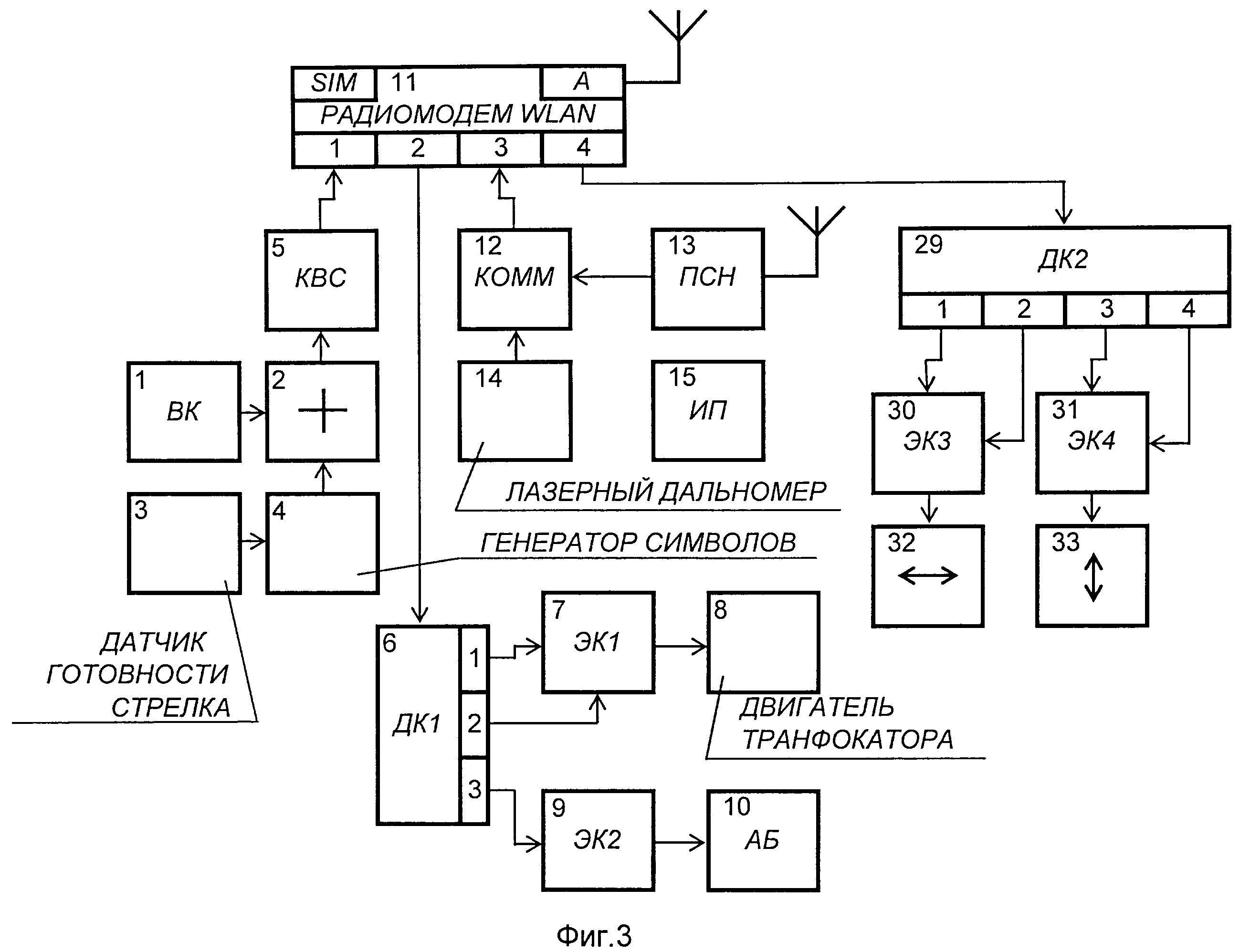
По второму варианту, каждый ИК дополнительно содержит (фиг.3) второй дешифратор команд (ДК2) 29, третий (ЭК3) 30 и четвертый (ЭК4) 31 электронные ключи, первый 32 и второй 33 шаговые микродвигатели механизма внесения поправок оптического прицела. Причем четвертый порт РМ подключен к входу ДК2, первый и второй выходы которого подключены к управляющим входам ЭК3, третий и четвертый выходы ДК2 подключены к управляющим входам ЭК4. Электронные ключи подают инверсное напряжение на первый и второй микродвигателя механизма внесения поправок от ИП.
По второму варианту, оборудование ЦП дополнительно содержит (фиг.4) второй последовательный коммутатор (ПК2) "N×1" 34 с выходом управления, а БВ имеет дополнительный выход передачи данных для управления микродвигателями механизма внесения поправок оптического прицела. Причем выход передачи данных подключен к входу ПК2, а каждый из N выходов ПК2 - па четвертые порты РМ, в соответствии с порядковыми номерами. Управляющий выход ПК2 подключен к входу управления УПК1.
Описанные компоненты заявленного изобретения структурно построены по известным правилам и выполнены на известной элементной базе с соблюдением требований по уровням сигналов, питающего напряжения и быстродействию. [6]
Миниатюрные цифровые видеокамеры с автодиафрагмой, автофокусом и управляемым трансфокатором известны и широко применимы. Дистанционное изменение угла обзора объектива производится подачей инверсного напряжения на шаговый двигатель трансфокатора через ЭК1. Команды на необходимое открытие ключа (логическая "1") поступают с первого и второго выходов ДК.
Аналогично, по команде с третьего выхода дешифратора, ЭК2 подает напряжение на электромагнит привода активации бойка. Привод содержит электромагнит с подвижным якорем, который выполняет роль бойка. Возможна реализация привода с передаточным устройством (тягой, толкателем и т.п.), которое производит разобщение курка, находящегося на боевом взводе, и шептала, удерживающего курок в таком состоянии. Реализация сенсорного датчика готовности стрелка возможна на базе емкостного сенсорного датчика типа B6TS-04LT "OMRON" или тактильного датчика QT113-D.
Сенсорный контакт на диэлектрической подложке устанавливается на поверхность спускового крючка под указательный палец стрелка.
Сигнал с датчика готовности стрелка усиливается до уровня логической единицы. Данный сигнал является командой для генератора сформировать (извлечь из памяти) видеосигнал экранной метки. Видеосигнал метки в устройстве сложения микшируется с видеосигналом от ВК и подается па КВС, где сжимается известным способом [7] и далее передается на первый порт РМ.
ПСН представляет собой миниатюрный чипсет с внешней антенной, установленной на корпусе винтовки. Конструкции ПСН в виде SMD-модулей хороню известны, например EMD3622F компании "eRide-22".
Реализация радиомодема широкополосной цифровой связи возможна на широком спектре оборудования технологии WMAN [8]. Организация связи между комплектами и центральным постом происходит автоматически, согласно действующим протоколам связи WMAN.
Необходимость ретранслятора обусловлена обеспечением коммутации и организацией устойчивой связи между несколькими ИК и ЦП в условиях сложных складок местности, плотной городской застройки, наличием препятствий в виде стен и перекрытий.
Реализация мобильного полевого ретранслятора возможна на основе типового оборудования базовых станций для широкополосной цифровой связи. Беспроводные широкополосные сети цифровой связи на сегодняшний день известны и постоянно совершенствуются.
Базирование оборудования ретранслятора возможно на любой транспортной платформе - автомобиль, вертолет, водный транспорт, ранцевый вариант.
Оператор ЦП имеет возможность управлять трансфокаторами (изменять угол обзора и панораму цели) видеокамер, коммутируя К1 или К2. При замыкании этих ключей, ГПИ генерирует (извлекает из памяти) кодовые посылки - наборы прямоугольных импульсов уровня логической единицы. При размыкании ключа кодовая посылка прекращает генерироваться. С выхода генератора кодовые посылки поступают на вход УМК.
Матричный коммутатор "1×N" - устройство позволяющее коммутировать один вход на N выходов в любой комбинации. С каждого выхода УМК сигналы управления подаются на первые порты РМ с номерами, в соответствии с порядковыми номерами выходов, и далее транслируются на оборудование ИК.
Со вторых портов каждого РМ принятая видеоинформация поступает па N устройств ДВС и далее на N входов мультиплексора с номерами, соответствующими порядковым номерам РМ. Мультиплексор - устройство, позволяющее одновременно выводить на экран видеоконтрольного устройства N изображений (мультиплексирование) или выборочно одно полноэкранное изображение.
Комплексный видеосигнал с выхода мультиплексора поступает на ВКУ1 и, параллельно, на записывающее устройство с генератором даты/времени.
С четвертых портов каждого РМ информация с координатами позиций ИК и расстоянием до цели поступает на N входов УПК, в соответствии с порядковыми номерами.
Последовательный коммутатор "N×1" - устройство, последовательно переключающее один выход на каждый из N входов с заданной частотой. Выход УПК подключен к первому входу БВ. Команда на подключение УПК к очередному РМ подается с управляющего выхода БВ на вход управления УПК, после записи в базу данных информации с текущего ИК.
На второй вход БВ поступает информация от МС с атмосферными датчиками температуры, влажности, давления, направления и силы ветра. Реализация МС возможна на базе комплекта оборудования метеостанции Davis Vantage Pro2 Plus компании "Davis Instruments" или метеостанции GWS10 с набором датчиков от компании "Garmin".
На третий вход БВ поступает информация с координатами позиции ЦП с выхода ПСН. БВ обрабатывает информацию постоянно, циклически, с заданной периодичностью, подключаясь к каждому ИК через РМ. Результат обработки с поправками прицела каждого ИК в алфавитно-цифровой форме, удобной для визуального считывания, поступает с видеовыхода БВ па вход ВКУ2. БВ имеет в своем составе базу данных с загруженными в нее картами местности и клавиатуру (по необходимости) для ввода данных о координатах цели. Реализация БВ возможна на базе современных платформ персональных компьютеров.
Индивидуальность каждого радиомодема в комплексе задается набором абонентских адресов (номеров), которые прописываются в индивидуальные SIM-карты.
По второму варианту БВ формирует сигналы управления микродвигателями механизмов внесения поправок в прицелы и имеет дополнительный выход передачи данных. Набор кодовых импульсов передается с выхода передачи данных БВ на вход ПК2 "1×N". Далее, с каждого из N выходов коммутатора - на третьи порты РМ с номерами, в соответствии с порядковыми номерами выходов. После того, как кодовый сигнал с n-го (n - номер в числовой последовательности от 1 до N) выхода ПК2 поступил на четвертый порт n-го РМ, ПК2 формирует сигнал переключения и подает его на вход управления УПК. Коммутаторы синхронно переключаются с n-го на n+1 модем. РМ индивидуального комплекта принимает сигналы управления и с четвертого порта передает их на вход ДК2. После дешифровки кодовых посылок, ДК2 инициирует соответствующее включение ЭК3 и ЭК4, которые подают инверсное напряжение па первый и второй микродвигатели механизма поправок прицела.
Возможное применение
С заявленным комплексом поставленные задачи решается следующим образом. Каждый стрелок занимает огневой рубеж и включает питание ИК. Одновременно с этим операторы ретранслятора и ЦП вводят в действие групповое оборудование, включив питание. Происходит активация электронной части компонентов, автоматическое определение координат позиций, расстояния до цели и установление каналов связи ИК с ЦП. Далее оборудование каждого ИК транслирует на ЦП информацию о координатах, расстоянии до цели и видеоизображение. БВ обрабатывает информацию от каждого ИК, вычисляет координаты групповой цели, автоматически считывает информацию с МС и ПСН, вычисляет поправки по каждому ПК и выдает информацию о поправках, в виде удобном для чтения, на ВКУ2.
Поступающая видеоинформация выводится на экран ВКУ1 мультиплексировано, в N видеоокон. Оператор имеет возможность управлять трансфокаторами видеокамер, замыкая первый и второй ключи, переключая матричный коммутатор в необходимых комбинациях, чем добивается необходимого размера изображения цели в каждом локальном видеоокне. Точка попадания (метка лазерного целеуказателя) отражается в мониторе на изображении цели в виде яркого белого пятна.
Оператор вербально, по служебному радиоканалу, сообщает каждому стрелку индивидуальную цель в группе, точку прицеливания и индивидуальные поправки прицела.
Далее, каждый стрелок вносит поправки в оптический прицел, выключает предохранитель винтовки, перезаряжает винтовку, осуществляет прицеливание. После чего, положив указательный палец на спусковой крючок, стрелок активирует сенсор датчика готовности.
На экране ВКУ1, в индивидуальном видеоокне данного ИК, появляется метка "Готовность". (Стрелок имеет возможность отменить состояние "Готовность" убрав палец со спускового крючка - генерация видеометки прекращается.)
После того, как в каждом видеоокне появилась метка "Готовность", оператор управляя матричным коммутатором подключает выход управляемого генератора на первые порты всех N радиомодемов. И далее, замкнув К3, оператор посылает сигнал активации выстрела на все N ИК. Оборудование каждого ИК принимает сигнал, обрабатывает и соответствующе исполняет, что приводит к подаче напряжения на электромагнит привода АБ. Электромагнит через тягу (толкатель и т.п.) разобщает боевое зацепление курка и шептала, курок приводит в действие ударник и боек - производится выстрел. Возможен вариант прямого разбивания капсюля патрона бойком-якорем электромагнита.
Оператор имеет возможность создавать локальные группы стрелков, коммутируя необходимые комбинации подключений ИК на матричном коммутаторе. Для активации залпового выстрела локальной группы необходимо далее активировать К3.
По второму варианту оператору нет необходимости вербально сообщать, а каждому стрелку вручную вносить поправки в механизм оптического прицела. Баллистический вычислитель дистанционно управляет механизмом внесения поправок в каждом из N ИК. Автоматическая корректировка производится постоянно, в течение всего времени проведения операции.
В обоих вариантах заявленного изобретения имеется возможность корректировки наведения пусковых ракетных установок или артиллерии. В обычном порядке, руководитель операции вербально сообщает артиллерийскому расчету координаты точки цели и поправки прицела. Имеется возможность постоянной (он-лайн) корректировки траектории полета высокоточного боеприпаса по радиоканалу с информационного выхода модуля БВ через радиопередатчик непосредственно на приемную часть радиоканального оборудования боеприпаса - управляемого артиллерийского снаряда или управляемой ракеты.
Противодействие акустическим системам обнаружения позиции снайпера заключается в следующем. Существующие акустические системы используют математический анализ разницы между временем аудиодетекции сверхзвуковой волны от летящей пули и временем детекции звукового фронта волны выстрела. Аудиодетекция производится сетью разнесенных в пространстве микрофонов. [9] Наличие нескольких синхронных сверхзвуковых волн и нескольких акустических фронтов создает невозможность их временного сопоставления и последующего математического анализа данных.
Промышленная применимость
В настоящее время все блоки и компоненты заявленного решения освоены или могут быть освоены промышленностью, поэтому следует считать предлагаемое изобретение соответствующим данному требованию.
Преимущества предлагаемой системы заключаются в том, что данный комплекс обеспечивает синхронность поражения групповых целей, повышенную точность поражения за счет инструментального вычисления поправок прицела и исключения человеческого фактора в производстве выстрела, обеспечивает противодействие акустическим системам обнаружения снайпера. Предлагаемая система использует стандартный боеприпас, минимальный вес компонентов, устанавливаемых на стрелковом оружии, отсутствие соединительных кабелей между стрелком и оружием, а так же высокую степень промышленной применимости.
Источники информации
1. RU 2240485 С2 F41G 3/00, 04.09.2002. "Устройство для автоматизированного прицеливания и выстрела из стрелкового оружия (его варианты)".
2. УДК 532.574.082: 54. Б.С.Ривкус, В.И.Смирнов, Е.А.Соколова. "Автометрия" №3: "Методы и аппаратура лазерной допплеровской анемометрии". - М.: АН СССР, 1982.
3. УДК 621.39.1.: 621.378: 532.57. B.C.Соболев. "Автометрия" №3: "Потенциальные возможности лазерной доплеровской анемометрии". - Новосибирск.: АН СССР, 1982.
4. WO/2008/157309 "Scout Sniper Observation Scope".
5. RU 26113 U1 F41G 1/38, 03.06.2002. "Система скрытого дальнего видеонаблюдения и группового поражения цели".
6. Ерофеев Ю.Н., "Импульсные устройства". - М.: "Высшая школа", 1989.
7. Олейник И., «Аппаратная компрессия». - «Системы безопасности», 2005 г., №1.
8. Шахнович И. "Широкополосная мобильность: IEEE 802.16е. Часть 2: Физический уровень и элементная база." - "Электроника: НТБ", 2008, №1.
9. US 2008/0162089 A1, Jul/3, 2008 «System and method for identifying a muzzle blast using a multi-sensor using a multi-sensor total energy approach».
Реферат
Изобретение относится к системам наведения и управления оружием и может быть использовано в антитеррористических операциях или для проведения армейских снайперских операций. Система включает в себя несколько индивидуальных комплектов снайпера, комплект мобильного ретранслятора и комплект мобильного центрального поста. Каждый индивидуальный комплект состоит из средства радиосвязи для вербального радиообмена и снайперской винтовки с оптическим прицелом. На винтовку дополнительно установлены: лазерный целеуказатель, лазерный дальномер с фотоприемником, датчик готовности снайпера, миниатюрная видеокамера с управляемым трансфокатором, устройство дистанционной активации бойка, радиомодем WMAN, приемник спутниковой навигации, сошки. В состав оборудования центрального поста входят: средства радиосвязи для вербального радиообмена, оборудование формирования и селекции команд управления, несколько радиомодемов WMAN, мультиплексор, два видеоконтрольных устройства, приемник спутниковой навигации, метеостанция с датчиками, баллистический вычислитель. По второму варианту оборудование центрального поста автоматически дистанционно управляет настройками прицела каждого индивидуального комплекта в соответствии с изменениями внешних условий. Техническим результатом изобретения является повышение точности поражения целей, синхронное поражение нескольких целей с различных огневых рубежей. 2 н. и 6 з.п ф-лы, 4 ил.
Формула
Документы, цитированные в отчёте о поиске
Оптико-механическое приспособление для стрелкового оружия и стрелковое оружие, содержащее оптико-механическое приспособление
Комментарии