Привод затвора орудия с линейной подачей затвора или боеприпаса - RU2505771C2
Код документа: RU2505771C2
Чертежи

Описание
Область техники, к которой относится изобретение
Изобретение относится к приводу затвора орудия с кривошипно-шатунным механизмом, в частности для линейной подачи затвора или боеприпаса в ствол орудия.
Уровень техники
У автоматических пушек с посторонним приводом энергия для привода орудия происходит не от давления газов или отката орудия, а создается за счет электро- или гидропривода.
Особенно у орудий с электроприводом вращательное движение двигателя должно преобразовываться для этого в колебательное движение затвора. Кроме того, затвор в конечных положениях своего пути перемещения требует времени остановки. В первом конечном положении гильза предыдущего снаряда перед затвором должна быть удалена, а новый снаряд подан перед ним, прежде чем он будет послан в патронник ствола орудия. В другом конечном положении затвор должен быть блокирован, а снаряд воспламенен. После падения давления газов в самом стволе затвор может быть затем разблокирован.
Жестко блокированный затвор прямого хода для автоматического орудия с посторонним приводом раскрыт в DE 3627351 C1. Для экономящей место и бесшумной блокировки предложен также управляющий валик.
В DE 3712905 A1 описано автоматическое орудие, содержащее в том числе кулачковый барабан, который, будучи приводимым в действие посторонним приводом, служит для линейного движения затвора прямого хода. Кулачковый барабан содержит бесконечно проходящий по периферии управляющий кулачок. На периферии расположены также короткий, радиально действующий и более длинный, аксиально действующий управляющие кулачки.
В DE 102005045824 A1 предложено небольшое орудие, управляющий валик которого расположен в плоскости канала ствола. Управляющий валик содержит несущее два управляющих кулачка управляющее тело. При этом информация кулачков преобразуется в прямолинейную подачу затвора.
Из DE 102007048768.4 известен привод для линейной подачи затвора или боеприпаса в ствол орудия или патронник посредством цепи. В противоположность приводу пушки «Bushmaster», у которой цепь направляется по четырем звездочкам в форме прямоугольника и посредством которой определяется время остановки затвора, сама цепь простым образом плотно направляется по двум звездочкам. Звено или кулачок цепи расположено/расположен в находящейся под подвижным ползуном направляющей или в пазу. За счет этого цепь может продолжать двигаться в течение времени остановки орудия, которое определяется отдельным функциональным управлением. Сама цепь может тогда приводиться в движение электродвигателем. Быстрый останов расположен при этом на пути движения цепи.
Линейная подача затвора в ствол орудия или патронник описана в DE 102007054470.9. При этом в приводном механизме выполнен прямой направляющий паз. В нем проходит средство, конструктивно связанное с затвором. В свою очередь, направляющий паз окружен огибающей принудительной направляющей (кулисой), которая интерпретирует необходимое время остановки затвора при блокировании, стрельбе, разблокировании в его переднем положении и при повторном заряжании, после которого затвор переводится в свое заднее положение. Передача привода может быть реализована роликами скольжения, зубчатыми колесами и т.п., приводимыми в движение двигателем и т.п. Сам привод продолжает работать в течение времени остановки орудия, тогда как затвор в течение времени остановки отводится и позднее снова подается.
Хотя в трех последних решениях рассматриваются приводы, которые могут использоваться на практике и которые в части скорострельности и механического износа показывают удовлетворительные результаты, изобретение ставит своей целью создание привода для такого привода, который мог бы найти применение также при более высокой скорострельности.
Раскрытие изобретения
Эта задача решается посредством признаков п.1 формулы. Предпочтительные варианты приведены в зависимых пунктах.
В основе изобретения поставлена задача реализации механизма, который вызывал бы небольшое ускорение затвора и работал бы без рывков и толчков, что позволило бы уменьшить силы инерции, приводную мощность и повысить скорострельность. Уменьшение приводной мощности вызывает к тому же уменьшение тормозной мощности в случае быстрого останова.
Для этого по принципу кривошипно-шатунного механизма вращательное движение преимущественно двигателя и т.п. преобразуется в возвратно-поступательное движение затвора. Чтобы обеспечить время остановки затвора в конечных положениях, шатун и кривошип расположены с возможностью радиального перемещения по отношению друг к другу, так что радиус кривошипа изменяется с его вращением. Радиальное ведение шатуна осуществляется управляющей канавкой.
Кривошипный привод имеет то преимущество, что малы вращающиеся массы (кривошип, двигатель и, возможно, редуктор), которые приходится затормаживать в случае быстрого останова. Он оказался к тому же простой конструкцией.
Краткое описание чертежей
Изобретение более подробно поясняется на примере его осуществления со ссылкой на чертежи, на которых изображают:
фиг.1 - схематичный вид привода с предпочтительной управляющей канавкой;
фиг.2 - привод затвора для реализации последовательности движений из фиг.1;
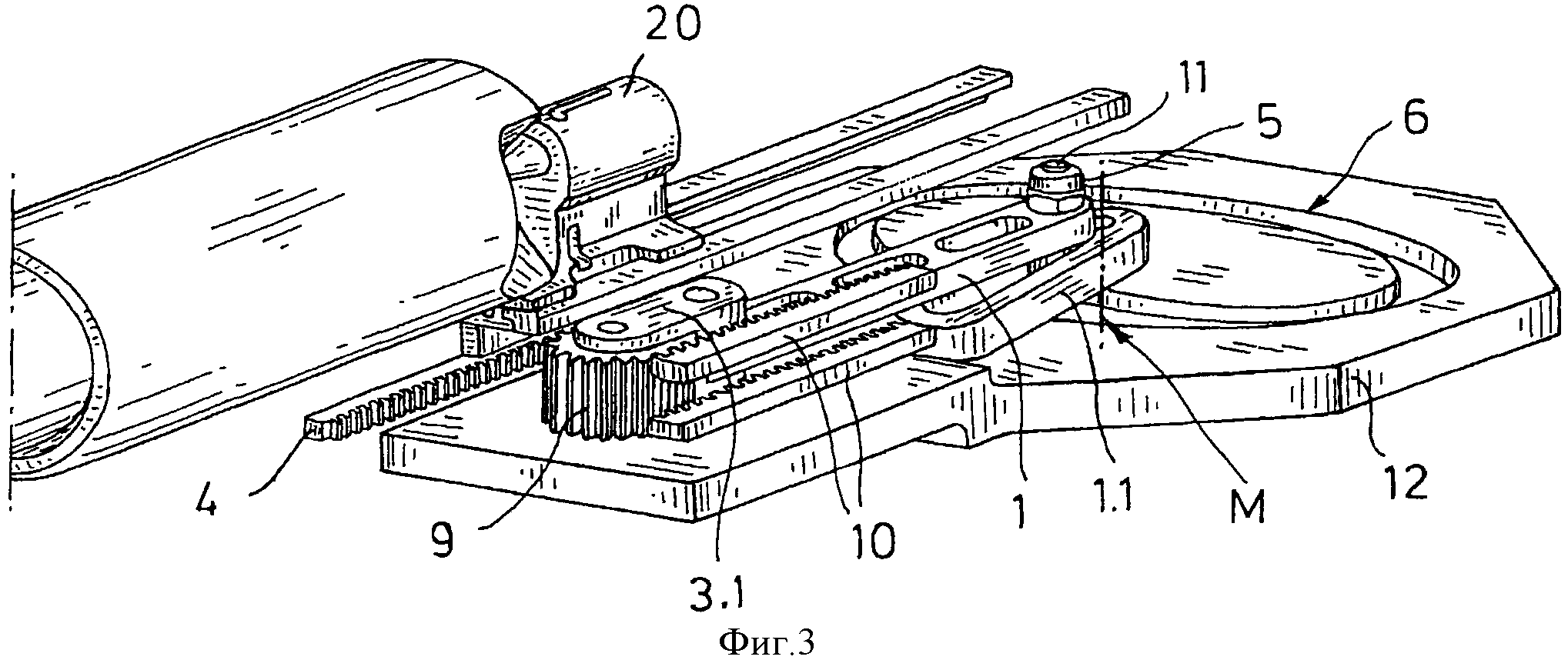
фиг.3 - подробный вид из фиг.2;
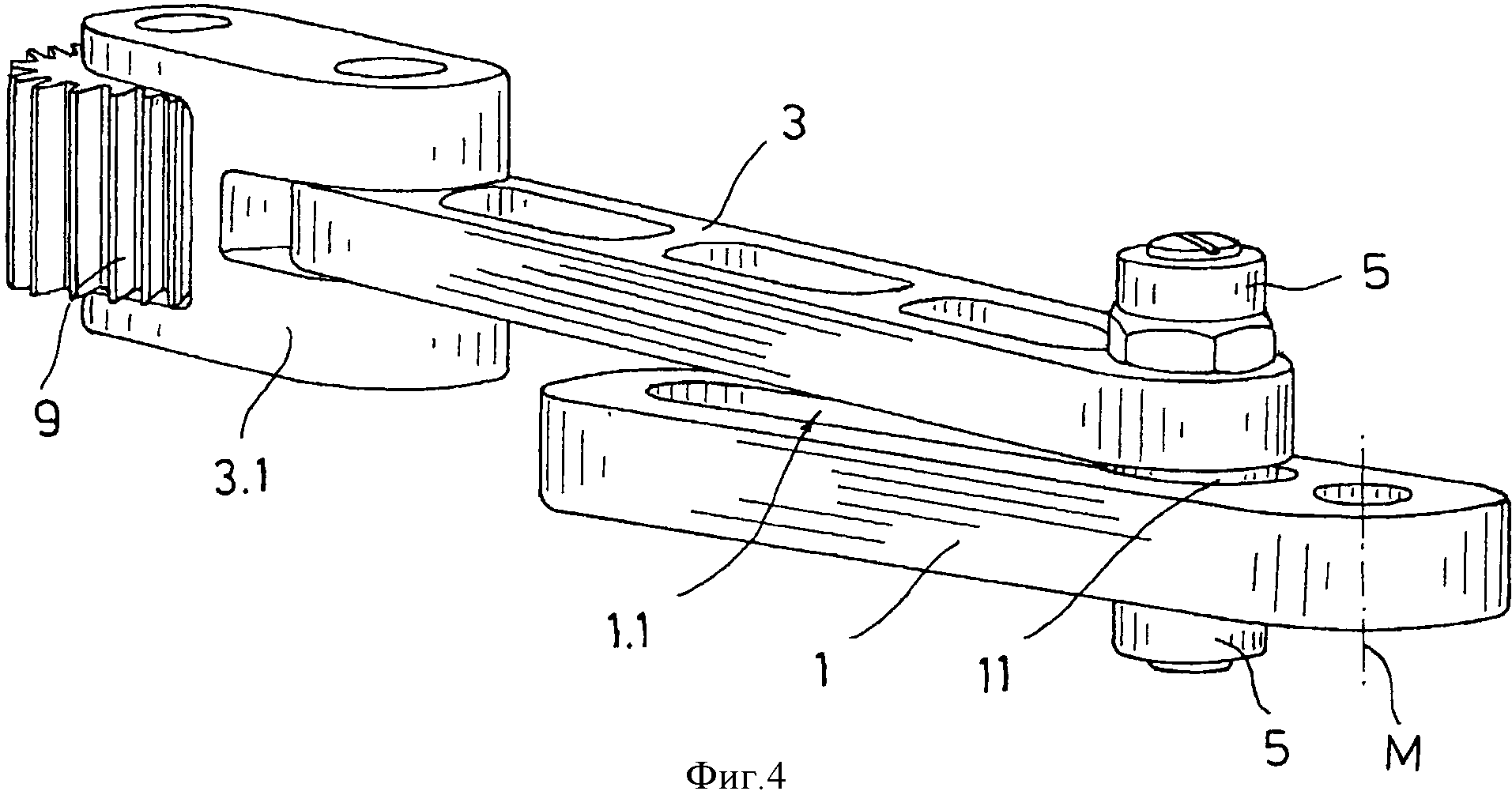
фиг.4 - фрагмент фиг.3;
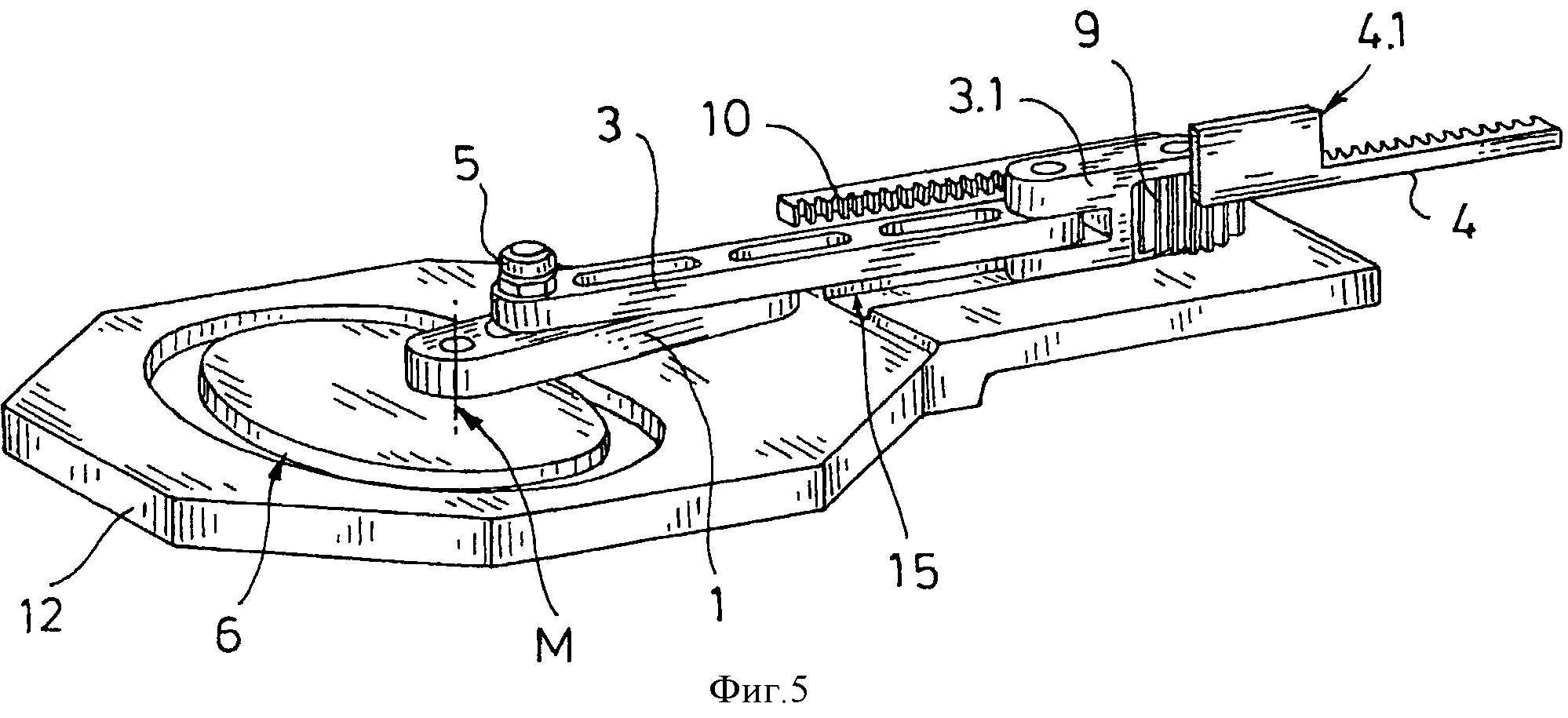
фиг.5 - фрагмент фиг.3.
Осуществление изобретения
На фиг.1 в первом общем виде схематично изображен привод 100. Ось вращения М кривошипа 1 и тем самым сам кривошип 1 приводятся в движение двигателем и т.п. (не показан). Шатун 3 установлен задним концом Еh с возможностью перемещения в пазу 1.1 кривошипа 1, а передним концом Ev соединен с затвором 20 или его поводком 4. На заднем конце Еh шатуна 3 расположены средства скольжения, например ходовые ролики 5, движущиеся по управляющей канавке 6, имеющей при виде сверху бобовидную форму. Управляющая канавка 6 образована четырьмя различными секторами или участками, которые создают нужное движение подачи затвора 20.
Участки управляющей канавки 6 определяют процессы движения затвора 20 следующим образом:
- α1-α2: затвор 20 сзади, постоянный радиус вокруг заднего конечного положения;
- α2-α3: движение затвора 20 вперед по произвольной функции;
- α3-α4: затвор 20 спереди, постоянный радиус вокруг переднего конечного положения;
- α4-α1: движение затвора 20 назад по произвольной функции.
Для того чтобы затвор 20 при постоянно вращающемся шатуне 1 останавливался в течение определенного отрезка времени в своих конечных положениях, управляющая канавка 6 имеет на участках α3-α2 и α3-α4 постоянный радиус вокруг соответственно переднего и заднего конечных положений затвора 20 с длиной шатуна 3. Формы участков между α2-α3и α4-α1задаются функциями движения, например синоидами, т.е. определяются движением затвора. Они могут быть оптимизированы, в частности, в отношении ускорения, максимальной скорости, отсутствия рывков и толчков и т.д.
Путь, проделываемый шатуном 3 между задним Ev и передним Еh конечными положениями, соответствует пути затвора 20. Длина шатуна 3 и кривошипа 1 или его паз 1.1 соответственно согласованы и рассчитаны.
На фиг.2 схематично изображен привод 100 для затвора 20 орудия 21 (показано лишь частично), в частности с посторонним приводом. Ствол 22 закреплен в блокировочной втулке 23 или на корпусе орудия. Затвор 20 выполнен с возможностью блокирования на ней. Затвор 20 может перемещаться по направляющим 2 в направлении оси ствола. Обозначен также корпус кривошипно-шатунного механизма (также возможно его расположение в корпусе орудия), состоящий из нижней части 12, а также в предпочтительном выполнении из верхней части 13. В них зеркально-симметрично выполнены управляющие канавки 6. Если можно исключить перекос оси 11 только в одной управляющей канавке 6, то можно отказаться от верхней части 13 корпуса. Управляющая канавка 6 может проходить тогда в нижней части 12 корпуса в виде открытого вниз паза.
На фиг.3 в сочетании с фиг.5 изображен поводок 4 затвора, носик 4.1 которого соединен с затвором 20 с геометрическим замыканием, а его зубчатый венец находится в зацеплении с зубчатым венцом шестерни 9. Последняя находится в зацеплении на противоположной стороне с закрепленными на корпусе зубчатыми рейками 10 (это крепление не показано) и установлена с возможностью вращения на головке 3.1 шатуна 3, которая, в свою очередь, соединена с ним пальцем. Шатун 3 и кривошип 1 соединены осью 11, причем установленные с возможностью вращения на обоих концах оси 11 ходовые ролики 5 движутся по управляющим канавкам 6 в нижней 12 и верхней 13 частях корпуса, а ось 11 перемещается в пазу 1.1 кривошипа 1. Кривошип 1 установлен с возможностью вращения вокруг центральной оси М на нижней части 12 корпуса, причем привод кривошипа 1 осуществляется двигателем через центральную ось М.
Чтобы создать нужное колебательное движение затвора 20 со временем ожидания в положениях возврата, кривошип 1 через центральную ось непрерывно приводится во вращательное движение двигателем 2. При этом кривошип 1 подхватывает ось 11 в направлении вращения. Радиальное ведение оси происходит за счет предпочтительно обеих идентичных управляющих канавок 6 в нижней 12 и верхней 13 частях корпуса, в которых движутся ходовые ролики 5 оси 11. Ось 11 передает их движение в соответствии с формой управляющих канавок 6 посредством шатуна 3 на его головку 3.1 (фиг.4).
На фиг.5 показано, что головка 3.1 шатуна движется в пазах 15 нижней 12 и верхней 13 частей корпуса, где воспринимаются боковые силы. Шестерня 9 головки 3.1 обкатывается при перемещении по закрепленным на корпусе зубчатым рейкам 10 и вращается. Вращательное движение шестерни 9 приводит в движение поводок 4, в результате чего ход по сравнению с ходом головки 3.1 удваивается. Если такого большого хода не требуется, то в качестве альтернативы затвор 20 может быть также связан непосредственно с передним концом шатуна 3. Поскольку поводок 4 носиком 4.1 соединен с затвором 20 с геометрическим замыканием, затвор 20 перемещается параллельно оси, однако, по меньшей мере, в направлении оси ствола 22 орудия.
Более компактная конструктивная форма управляющей канавки (канавок) 6 может быть достигнута в том случае, если между центральной осью и двигателем 2 расположить пару, например, эксцентричных зубчатых колес (не показаны), которые вращаются с двойной частотой вращения кривошипа 1. Эксцентричные зубчатые колеса вызывают непрерывное передаточное отношение, так что кривошип 1 при постоянной частоте вращения двигателя на фазах времени ожидания вращается медленнее, а на фазах движений затвора - быстрее. За счет этого угловые диапазоны α1-α2и α3-α4управляющей канавки (канавок) 6 могут быть меньше без сокращения времени ожидания затвора 20 в переднем и заднем конечных положениях.
Реферат
Изобретение относится к приводу затвора орудия с кривошипно-шатунным механизмом, в частности для линейной подачи затвора или боеприпаса в ствол орудия. Привод (100) затвора (20) для перемещаемого в осевом направлении к стволу (22) орудия затвора (20) снабжен двигателем (2), содержащим кривошип (1), выполненный с возможностью приведения в движение через свою ось вращения (М); шатун (3), расположенный с возможностью перемещения задним концом (E) в пазу (1.1) кривошипа (1), а передним концом (Е) соединенный с затвором (20) или его поводком (4) через шестерню (9). Кривошип (1) и шатун (3) соединены между собой через ось (11), расположенную в пазу (1.1). На заднем конце (Е) шатуна (3) с возможностью движения в управляющей канавке (6) вдоль нее расположено, по меньшей мере, одно средство скольжения (5). Управляющая канавка (6) выполнена замкнутой криволинейной и имеет определенные участки (α, α, α, α) в качестве профиля движения затвора (20). Поводок (4) затвора (20) или его часть имеет зубчатый венец, входящий в шестерню (9), установленную с возможностью вращения на/в шатуне (3) на передней стороне. Затвор (20) при вращении кривошипа (1) движется посредством шатуна (3). Обеспечивается работа привода затвора без рывков и толчков, что позволяет уменьшить силы инерции, приводную мощность и повысить скорострельность орудия. 7 з.п. ф-лы, 5 ил.
Формула
- кривошип (1) выполнен с возможностью приведения в движение через свою ось вращения (М);
- шатун (3) расположен с возможностью перемещения задним концом (Eh) в пазу (1.1) кривошипа (1), а передним концом (Еv) соединен с затвором (20) или его поводком (4) через шестерню (9), причем
- кривошип (1) и шатун (3) соединены между собой через ось (11), расположенную в пазу (1.1);
- на заднем конце 5(Еh) шатуна (3) с возможностью движения в управляющей канавке (6) вдоль нее расположено, по меньшей мере, одно средство скольжения (5);
- управляющая канавка (6) выполнена замкнутой криволинейной и имеет определенные участки (α1, α2, α3, α4) в качестве профиля движения затвора (20);
- поводок (4) затвора (20) или его часть имеет зубчатый венец, входящий в шестерню (9), установленную с возможностью вращения на/в шатуне (3) на передней стороне, причем
- затвор (20) при вращении кривошипа (1) движется посредством шатуна (3).
Комментарии