I Изобретение относится к системе .управления автоматическими прессовыми
линиями для изготовления листовых деталей за несколько рабочих циклов, и состоящих из головного
пресса и нескольких последующих прессов, каждьй из .которых снабжен , автономным регулируемыгл приводом,
действующим в допустимомдиапазоне рассогласования положения один относительно другого, причем у каждого
пресса имеется подающее и разгрузочное устройства, а меаду соседними
разгрузочным и подающим устройствами размещается транспортирующий механизм .
Известны различные варианты управления автоматической прессовой линией , в основу которых заложены две
принципиально отличающиеся системы. К одной системе относятся автоматические
синхронизированные прессовые линии с прессамиJ работающими в нецрерывном режиме на основе строгой
поточной схемы для транспортировки заготовок от позиции на протяжении -всей линии, (патент ФРГ № 146080,
54 b 3/60,1935;: патент ФРГ 1602570, 58а 15/14, 1970, патент США№3199439 100-43, 1965) З .
Условием работы такой линии является полная синхронность всех прессов
при сохранеии определенного жесткого допуска рассогласования углов кривошипов всех прессов, а
также регулировке скорости приводов прессов относительно головного
пресса, как это реализуется в известных схемах управления; /Патент ГДР 9594, 42 R2 13/64, 1972J заявку
ФРГ 156803, 15 d 28/04, 1936, заявка ФРГ № 1752946, 21 С 62/30,1970, заявка ФРГ № 1763397, 21 С 62/30,
1971, заявка ФРГ 1777355, В 21 D 43/05, 1972. 4 - В .
Недостаток подобных прессовых линий заключается в том, что они постоянно
изменяют число оборотов двигателя и маховика в зависимости от управляемой величины. Для этого требуются
большие затраты на электронику и систему регулирования скорости привода.
Для получения короткого времени регулировки при больших инерционных
моментах, т.е. сохранение углового допуска в рассогласовании, требуется
, чтобы главный привод прессов был избыточных размеров по сравнению с другими прессами, работающими в
единичном режиме с целью выравниван я Моментов ускорения и замедления
требующих для изменения скорости.
Кроме того, для подобных систем
требуется использование дорогостоящих 4-квадрантовых приводов с тиристорным -управ-пением.
В связи со сложностью таких линий при их техническом обслуживании,
ремонте и переналадке у потребителя возрастут экспл атационные затраты,
а также потребуется высококвалифицированный персонал, что не удовлетворяет
условиям работы в кузнечно-прессовых цехах и не обеспечивает требуемой высокой производительности.
Ко второй системе управления относятся известные автоматические
прессовые линии, у которых все пресс работают единичными ходами. (Заявка
ФРГ I 2209233, 49т41/02, 1977. Журнал Shut Metal Industries, март 1962, с. 209-211) И и lOj.
К таким системам управления относятся такжр линии, в которых головной
пресс работает в непрерывном режиме, а последующие - в единичном ( заявка ФРГ № 1271067, 7 С 43/05,
1968 (прототип) llj .
В таких линиях для транспортировк
заготовки от позиции к позиции требуется также поточная система подачи
. Управление такими линиями осуществляется относительно просто. Недостаток таких линий заклкУчается в
низкой производительности по сравнению с синхронизированными автоматическими
прессовыми линиями, а также в повышенной нагрузке на главные и вспомогательные приводы (муфта и
тормоз), а также на приводные передачи средств автоматизации, акая нагрузка связана с большим износом, увеличением расхода энергии и больши шумом.
Целью изобретения является снижение технологических затрат при изготовлеийи с достижекием таких же
эксплуатационнь1х параметров, в частности производительности, как и в
известных синхронизированных автоматических прессовых линиях, снижение
издержек производства, а также расходов на техобслуживание и ремонт у потребителя по сравнению с известными
техническими решениями. Исходя из цели изобретения, решается задача создания таких автомати
. ческих прессовых линий, у которых издержки на управление будут значительно ниже, чем у известных до этого
синхронизированных линий, и будет возможным применение обычных отдельных прессов с приводами обычных раа
меров,а также достижение более высокой производительности по сравне-. нию с линиями, где прессы работают
единичными ходами или же Головной пресс работает в непрерывном режиме а последующие прессы - одиночными
ходами. Это достигается путем исключения пауз между отдельными ходами прессов и с одновременным уменьше
нием частоты включения прессов и средств автоматизации, что позволяет обеспе ить повышение срюка службы
узлов, подвергающихся большой нагруз ке (муфта и тормоз), а также передачи ;1ля средств автоматизации.
Для синхронизирования прессов в пределах доступного диапазона их углового рассогласования один относи
тельно другого последующие прессы оснащены дополнительно к имекяцемуся
приводу регулировки числа оборотов устройством двухпозиционного измеивния скорости, чем обеспечивается
настройка верхнего или нижнего предела числа оборотов в рамках заданно
го диапазона регулируемого числа обо ротов в зависимости от рассогласования
каждого последующего пресса и головного пресса или каждого пресса ;и предыдущего.
Настроечным элементом двухпозиционного устройства регулирования ско. .рости является сдвоенная муфта -с
двумя дополнительно включаекЕФ1И различными ступенями передач для верхнего и нижнего предела числа
оборотов, расположенная между ма- ховиком и кривошипным валом. Пределы
работы двухпозиционного устройства определяются на подашцем устройстве Ксшдого последующего пресса к
разгрузочному устройству головного пресса или к разгрузочному устройству
предыдущего пресса или же непбс-. родственно на каждом прессе, . Рассогласование, т.е. сопоставление заданного и фактического значений пределов, работы двухпозиционного
устройства, производится за счет одного или двух выключателей на каждом прессе. Рассогласование между
прессами образуется схемой формиро-. вания сигнала, вкдпочеаацей настроечный
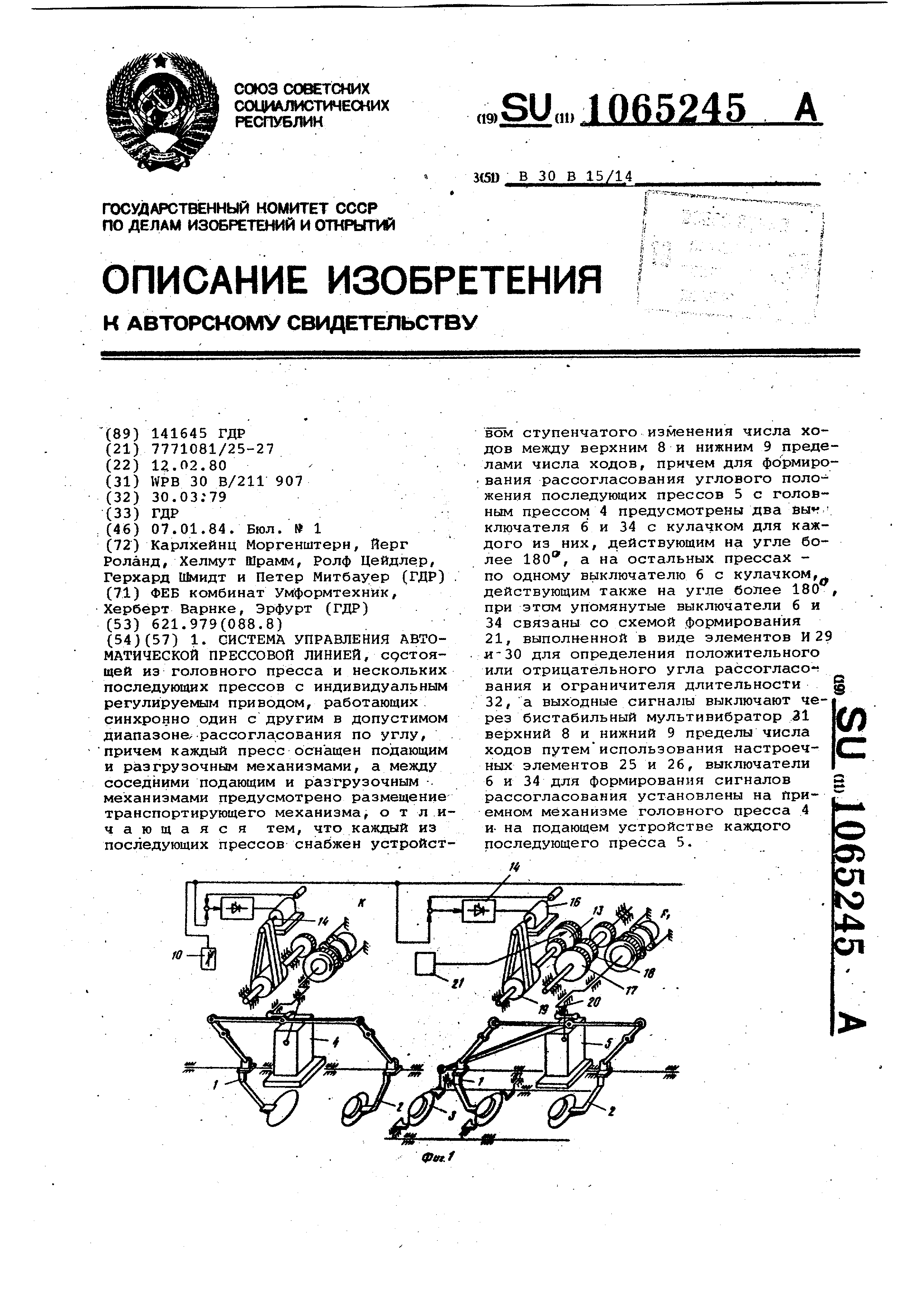
элемент для верхнего и нижнего предела 4исла оборотов. На фиг.1.показана прессовая, линия
, .состоящая из головного пресса с несколькими последуннцими прессами,
каждый из которых содержит собственный привод регулировки числа оборотов , работающий в одном допустимом
диапазоне синхронно, при этом у каждого пресса имеется подакйцее и разгрузочное
устройство, а первый последующий пресс линии имеет устройство (сдвоенная муфта) с двумя ступенями
передач между маховиком и коленчатым валом; на фиг.2 - отношение члс
числа оборотов при работе линий, последующие прессы которой регулируются
между верхним и нижним числом оборотов в пределах регулируемого диапазона/
на фиг.З - блок-схема принципа действия прессовой линии с приводом регулировки числа оборотов и
синхронизированнем углового рассогласования с помощью двухпозиционного
устройства по фиг. на фиг.4 блок-схема принципа действия линии
с приводс1ми регулировки числа оборотов и синхронизированием угла рассогласования
посредством двухпозиционного устройства по фиг.6/ на фиг.5 - схема формирования сигнала
рассогласования двумя выключателями головного пресса и одним выключателем
каждого последукицего пресса с помощью схемы формирования сигнгшов
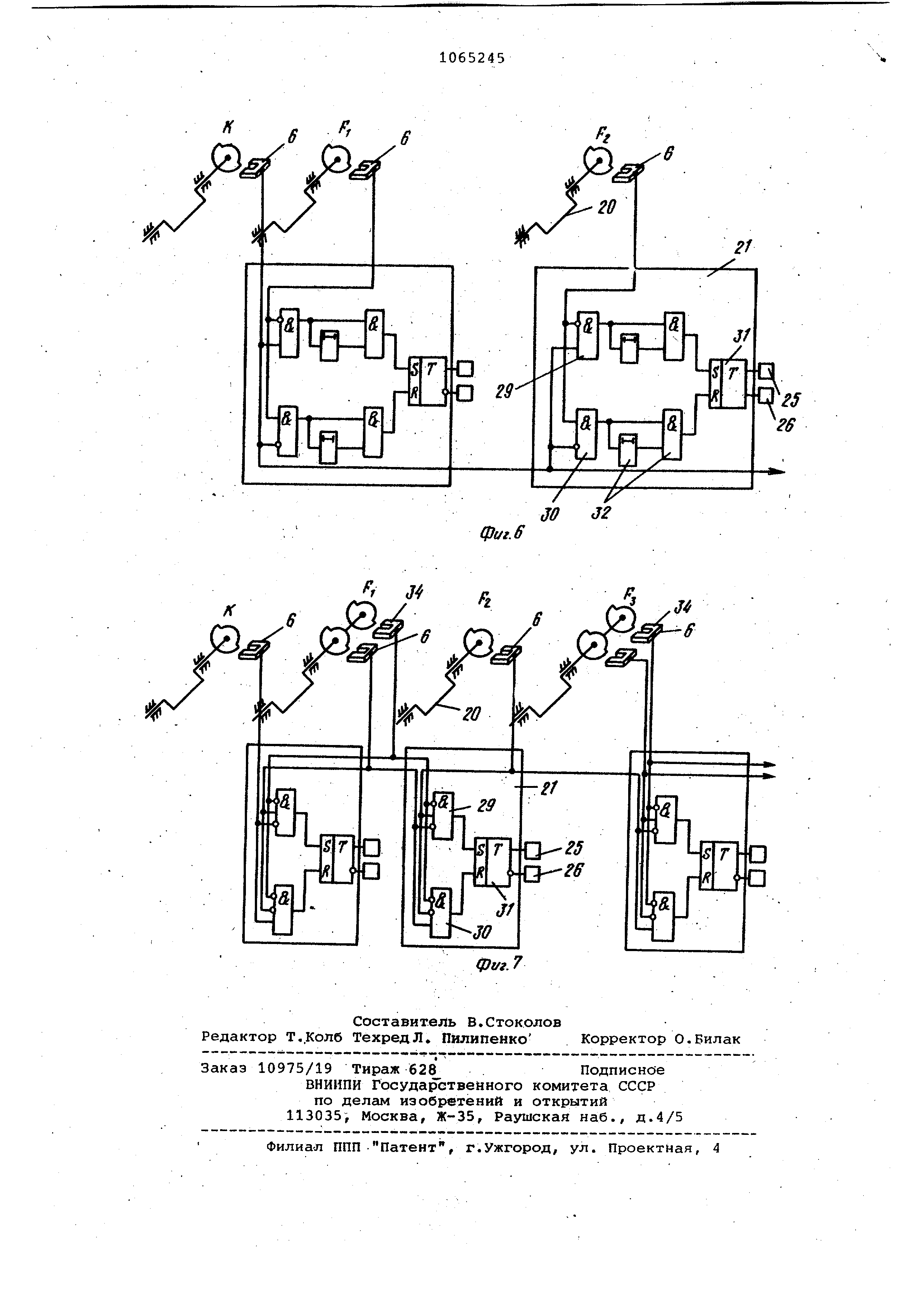
между головным и каждым последующим . прессом; на фиг.6 - схема формирования
сигналов рассогласования посредством выключения каждого из прессов
со схемой формирования между головным и каждым последующим прессом/
на фиг.7 - схема формирования сигналов рассогласования посредством вы-ключателя
на каждом прессе и второго выключателя на кгикдом втором прессе и схемы формирования между
соответствующим прессом и его предыдущим прессом. Как видно из фиг.1, для приспообления
к различным технологическим условиям положительным является оснащение каждого пресса, расположенного
в линии, приводом с регулируемым числом оборотов.При этом предпочтение
отдается приводу постоянного тока. Запуск двигателя осуществляется многократно
с помощью одноквадратного тиристорного преобразователя. Диапазон настройки числа ходов или
оборотов от ПА,ИН ДО акой линии составляет 1:2.
Однако настройка числа ходов не выравнивает рассогласование, возникающее
в связи с различными потреб- с лениями тока при работе пресса и точности регулировки приводов. Это
изменение рассогласования работы прессов один относительно другого возникает и тогда, когда запуск ,пресса
произошел без рассогласования . При каждой технологической перестройке на новую заготовку возникают
новые различные потребления рабочего тока, которые, в свою оче-редь , приводят к другому положению
приводов прессов.
На приведенных чертежах (фиг.1-7)
Обозначены подающее устройство 1, разгрузочное устройство 2, заготовки
3, головной пресс 4, последующий 20 пресс 5, выключатель 6 с управляющим кулачком, действующим более
чем на 180, выключатель 7, верхний
8 и нижний 9 пределы числа оборотов
, центральный датчик 10 заданно- 25 го значения, диапазон 11 регулировки
числа оборотов, сельсин-датчик 12,
сдвоенная муфта 13, однократный привод
14, сельсин-приемник 15, двигатель 16, ступень передачи 17, сту- ЗО
пень передачи 18, маховик 19, кривошипный вал 20, схема обработки 21,
тактированный механизм транспортировки 22, петля 23, контактный ролик 24. настроечный элемент 25 для
верхнего и 26 для нижнего предела числа оборотов, распушитель 27, электрический вал 28, схема И 29 для
положительного и 30 для отрицательного отклонения фазы, бистабильный
.-40 мультивибратор 31, ограничитель дли
тельности импульса 32, устройство
33для формирования рассогласования
фазы посредством петли, выключатель
34с кулачком, действующим более
чем на 180.45
Предложенное техническое решение
обеспеч.ивает последующие прессы 5 верхним и нижним пределом числа оборотов
8 и 9, выравниваются посредством двухпозиционного устройства по- 50
следующего пресса 5 и головного пресса 4 или соответствующего предыдущего пресса.
Подача листов подающему устройству 1 головного пресса 4 осуществляется 55
посредством,известного подающего устройства.
Между соседними прессами 4 и 5 .
расположено поточное транспортирующее устройство 22. Приемный меха- 60
низм 2 головного пресса 4 передает заготовку 3 на площадку транспортирующего
устройства 22, это устройство передает заготовку 3 на приемную площадку. Транспортирующее устройст- .j
во 22 может приводиться в действия как от предыдущего, так и от последующего
пресса 4, 5 или собственным приводом. В зависимости от рода привода транспортирующего устройства
22 передающая площадка пресса 4 или 5 находится или на грузовой площадке , или на приемной площадке
транспортирующего устройства 22.
Если нет транспортирующего устройства
22, то разгрузочная позиция приемного механизма 2 является одновременно грузовой позицией подающего
механизма 1.
Как видно цз фиг.2 у головного пресса 4 появляютсяиные средние
значения числа ходов в диапазоне Л и /3 для диапазона регулировки числа
оборотов 11, который задается значением 5 W, чем для последующих.прессов
5 со средними числами оборотов f Б,,р. Изменения средних чисел оборотов
вызываются разницей времени хода , что приводит к такому фазовому сдвигу..
Характерным признаком такого принципа управления является то. что число
ходов последующих прессов 5 колеблется по сравнению со средним числом
ходов головного пресса 4 в интервала между верхним и нижним пределом числа
оборотов 8 и 9. Расхождение среднего числа ходов или головного пресса
4 с верхним и нижним пределом числа оборотов 8 и 9 последующих прессов является только приблизительно
постоянным,так как верхний и нижний предел числа обормотов образуется за
счет постоянного скачка числа i оборотов 1. Этот скачок числа оборотов
5 может быть одинаков как для всех последующих прессов 5 линии, как это
представлено на-фиг.2, так и для каждого отдельного последующего пресса линии, и задаваться отдельно.
В связи с различным рабочим потреблением тока прессами 4 и 5, а также
за счет точности регулировки появляются расхождения среднего числа
ходов ct, ,, главного пресса 4 и / , S,6,ру последуюпЫх прессов 5.
Прессы 4 и 5 оснащены приводами с регулированием числа оборотов и
с одноквадрантными тиристорными устройствами/ питаемыми через выпрямитель
тока. В соответствии с технологическими условиями для всех прессов линии задается одинаковое значение
пределов регулировки числа оборотов 11 &W(t или SWF : SWf j посредством
центрального-датчика 10. В фиг.4-7 представлены варианты синхронизирования
фаз прессовых линий двухпозиционными выключателями. Настроечный элемент регулятора в последующем
прессе согласно фиг.1 состоит из сдвоенной муфты 13, благодаря которой rionepeMeFJHo включаются две различных ступени передачи 17 и 18. Требующееся передаточное отношение
обоих ступеней передач 17 и 18 получается из среднего числа ходов го ловного, пресса 4 при наименььаем чи
ле оборотови tritn . Целесообразно размещение сдвоенной муфты 13 между маховиком 19 и кривошипным валом 20
последующих прессов 5, так/ чтобы на,копленная энергия маховика 19 использовалась для быстрого перевода
. на большее число оборотив HJJH инерционность маховика 19 для перевода работающих масс на нижнее число
оборотов. Для формирования рассогласования фаз последующих-прессов 5с.
главным преесом 4 имеется схема 21 формирования сигналов, подчиненная каждому из последующих прессов 5 и
соединенная на входе с одним из выключателей 6 на каждом из последующ
прессов, а на -выходе - с настроечным элементом сдвоенной муфты 13. Кроме
того, все схемы формирования соедииены на входе с выключателями 6 и 3
на головном прессе. Все выключатели 6 приводятся в действие управляющим
кулачком, действующим преимуществен но на угле более 180 , который евязан
с кривошипным валом 20 соответствующего пресса. При несинхронной работе последую
щего пресса 5 с головным прессом 4 выходные сигналы выключателя, относ
щегося к данному прессу поступают в соответствующую схему формирования .
со сдвигом по фазе. С помощью ячеек И 29 определяется направление сдвига, по фазе. Для задания верхнего
и нижнего предела сдвига по фазе имеется выключа.тель 34, по этому он приводится в действие управляющим
кулачком, действующим на угле более чем 180, и который соединен с кривошипным валом 20 головного пресса.
Кулачок выключателя 34 головного пресса 4 установлен преимущественно
11
0tft.2 . симметрично с кулачком выключателя
6. Все выключатели б и их соответствующие кулачки расположены так, чтобы
при синхронной работе приводились в действие одновременно. Если одним.
из последукнцих прессов 5 достигается сдвиг по фазе, который больше, чем
половина расхождения действующего кулачка 6 или 34, то последователь, ность импульсов, сформированная в
ячейках И 29 и 30 выдается на, подключенный бистабильный мультивибратор 31 и действует как незатухающий
сигнал на настроечные элементы 25 или 26, подчиненный соответствующему выходу с целью включения верхнего
или нижнего пределов числа оборотов 8 и 9. Вариант формирования рассогласоваг.
ния в регуляторе представлен на фиг,6. При этом выключатель 34 из фиг.5 и соответствующие входы ячеек
И 29 или 30 заменяются ограничителем длительности импульсов 32, состоя-щим
из элемента задержки, а также из схемы И. Тем самым лишь с определенной
длительностью импульсов,: соответствующей допустимому, сдвигу по
фазе прессов обрабатывается после овательность импульсов, сформированная схемой И 29 или 30.
На фиг.7 представлен пример такой же схемы формирования, как на фиг.5.
При этом сдвиг по, фазе всех прессов определяется относительно предыдущего
пресса и регулирует так же, как и на фиг. 5, число оборотов или. фазы
сортветствующего пресса. Из этого следует, что выключатель 34 можно
использовать только для соответствующих двух соседних подключенных прессов
и потому он повторяется несколько раз. Признано изобретением по результатам
экспертизы, осуществленной Ведомством по изобретательству Германской Демократической Республики
.
J2}
jT л /,
фиг. J
5E7w, еэ




Комментарии