Комплекс микрогидроударной очистки внутренней поверхности труб теплообменного агрегата - RU2772008C1
Код документа: RU2772008C1
Чертежи
Описание
Изобретение относится к устройствам, предназначенным для очистки поверхностей, в частности, для чистки внутренних поверхностей труб или систем трубопроводов, путем механического воздействия потока текучей среды, например, сильным напором струи с использованием чистящих устройств, введенных в трубы и движущихся вдоль них.
Очистка труб теплообменных агрегатов производится для удаления солей, выпадающих из воды и отлагающихся на стенках барабанов, коллекторов и труб. Выпадение солей происходит при нагревании и испарении воды, причем в некоторых случаях выпадающие соли равномерно покрывают внутренние стенки плотной и трудноотделимой коркой, которая называется накипью. В котлах встречается твердая, вязкая и рыхлая накипь. Наиболее опасной является вязкая накипь, обладающая низкой теплопроводностью. Наличие слоя накипи затрудняет теплопередачу от газов к воде. В некоторых случаях слой накипи толщиной 0,2 мм может вызвать недопустимый перегрев стенок труб, вызывающий пережог металла. На внутренней поверхности экранных труб котлов высокого давления, особенно в зоне максимальных тепловых напряжений, появляются отложения накипи, которые могут привести к появлению свищей и к развитию интенсивной подшламовой коррозии, чаще всего около сварных соединений.
Известны комплексы гидродинамической очистки внутренней поверхности труб теплообменных агрегатов от накипи, органических и химических отложений (US20190163207, US20200356117, US20150068563, US20140336828, US20140336827, US20160129552, US10040169, US20140333525, US10265834B2, US20140336793, RU 2641277), основанных на использовании чистящих струйных головок, вводимых в полости теплообменных труб.
Наиболее близким по назначению и эффективности очистки труб теплообменных агрегатов от накипи, органических и химических отложений относится комплекс гидродинамической очистки поверхностей на основе микрогидроударного эффекта, является патент (RU 2641277, кл. B08B 3/02, B05B 1/02, 2018 г). Устройство для гидродинамической очистки поверхностей на основе микрогидроударного эффекта содержит подвижный микрогидроударный очиститель, шланг высокого давления и насосную станцию. Микрогидроударный очиститель выполнен в виде насадки, содержащей проточный канал с профилем, образованным расположенным соосно и последовательно сопряженным друг с другом входным конфузором, резонансной камерой и диффузором. Для обеспечения обратно-поступательного перемещения насадки в каналах труб теплообменных агрегатов в процессе их чистки насадка выполнена с диаметром, меньшим диаметра очищаемых каналов, и снабжена ручным приводом в виде полужесткой силовой трубы, соответствующего диаметра. Вход водоподающей трубы соединен через шланг высокого давления с выходом насосной станции.
Недостатком известного устройства является невысокая производительность гидродинамической очистки внутренней поверхности труб на основе микрогидроударного эффекта, из-за использования ручной очисткой труб и ручного контроля качества их очистки по сопротивлению прохождения насадки в указанных каналах.
Проблемой, на которую направлено изобретение, является автоматизация процесса микрогидроударной очистки труб теплообменного агрегата с одновременным автоматическим контролем качества указанной очистки.
Техническим результатом изобретения является повышение производительности и качества гидродинамической очистки внутренней поверхности труб теплообменных агрегатов на основе микрогидроударного эффекта.
Поставленная проблема и заявленный технический результат достигаются тем, что комплекс микрогидроударной очистки внутренней поверхности труб теплообменного агрегата содержит подвижную насадку микрогидроударной очистки, шланг высокого давления и насосную станцию. Согласно изобретению комплекс дополнительно содержит электромеханический робот очистки с числовым программным управлением, выдвижная пустотелая штанга которого выполнена из упругого материала и соединена по входу через шланг высокого давления с выходом насосной станции, а по выходу - с насадкой микрогидроударной очистки. Электромеханический робот очистки содержит также механизмы двухкоординатного продольного и поперечного перемещения штанги от приводов соответствующих реверсивных электродвигателей с возможностью ее позиционирования и дифференциальный датчик местоположения штанги и скорости её движения, соединенный по сигнальному выходу с сигнальным входом электромеханического робота очистки, управляющие выходы которого соединены с управляющими входами соответствующих электродвигателей.
Цифровой блок управления может быть выполнен в виде контроллера или микроЭВМ, который снабжён цифровой картой труб теплообменного агрегата, программой управления выдвижной пустотелой штанги в поперечной и продольной плоскости на основе цифровой карты.
Цифровой блок управления также снабжён программой оценки чистоты полости труб теплообменного агрегата, на основе данных дифференциального датчика о снижении скорости продольного движения штанги при пониженной проходимости насадки микрогидроударной очистки в зоне повышенного загрязнения труб теплообменного агрегата.
Введение электромеханического робота очистки, снабжение его выдвижной пустотелой штангой для возвратно - поступательного перемещения насадки в каналах труб теплообменного агрегата, снабжение его дифференциальным датчиком движения выдвижной пустотелой штанги, а также наличие цифрового блока управления с программой определения места загрязнения каналов труб теплообменного агрегата по данным датчика движения, позволяет автоматизировать процесс микрогидроударной очистки труб теплообменного агрегата, с одновременным контролем качества указанной очистки, а также исключить необходимость остановки процесса очистки труб, а за счет реверсивной тяги выдвижной пустотелой штанги обеспечить повторную очистку места загрязнения.
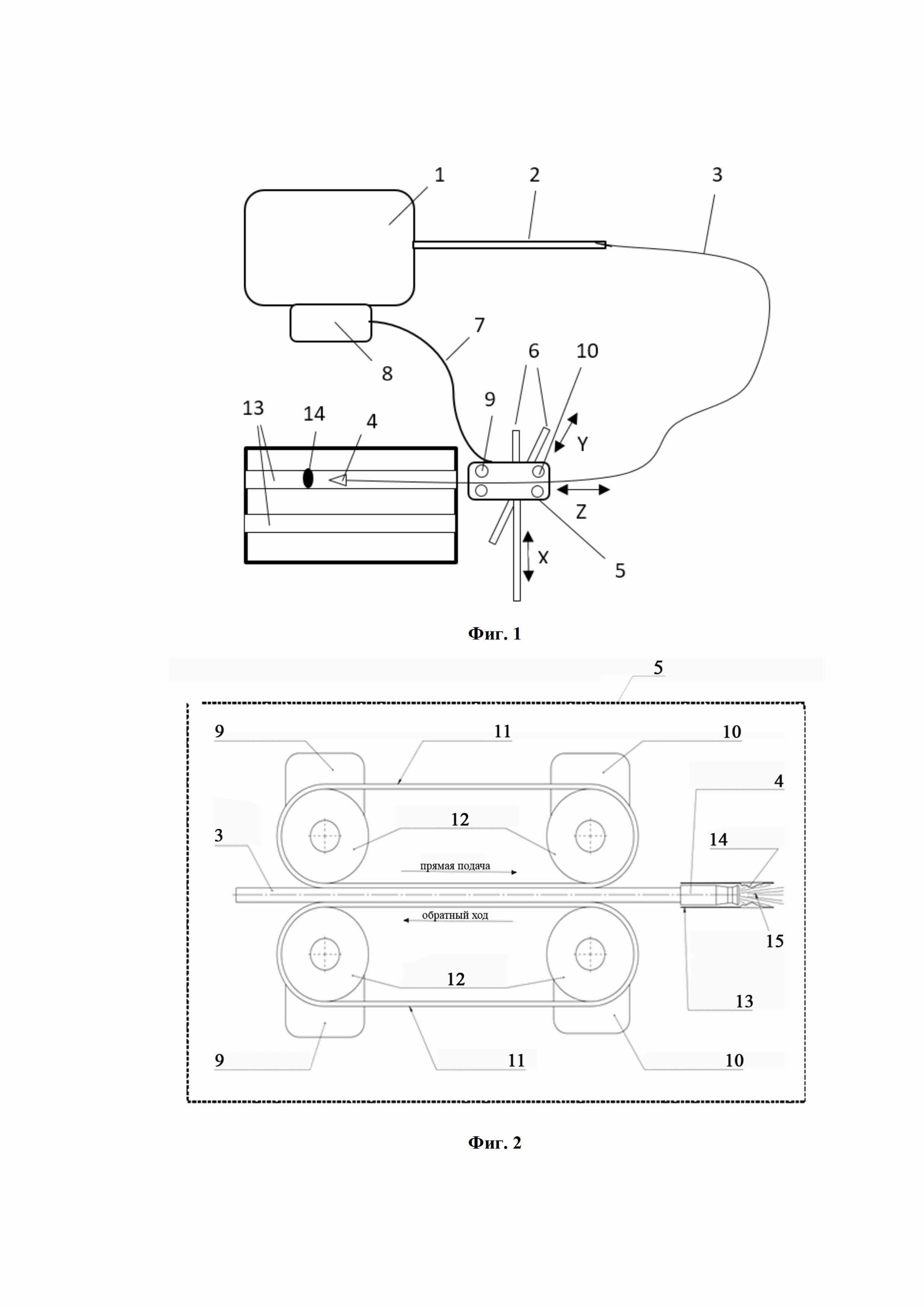
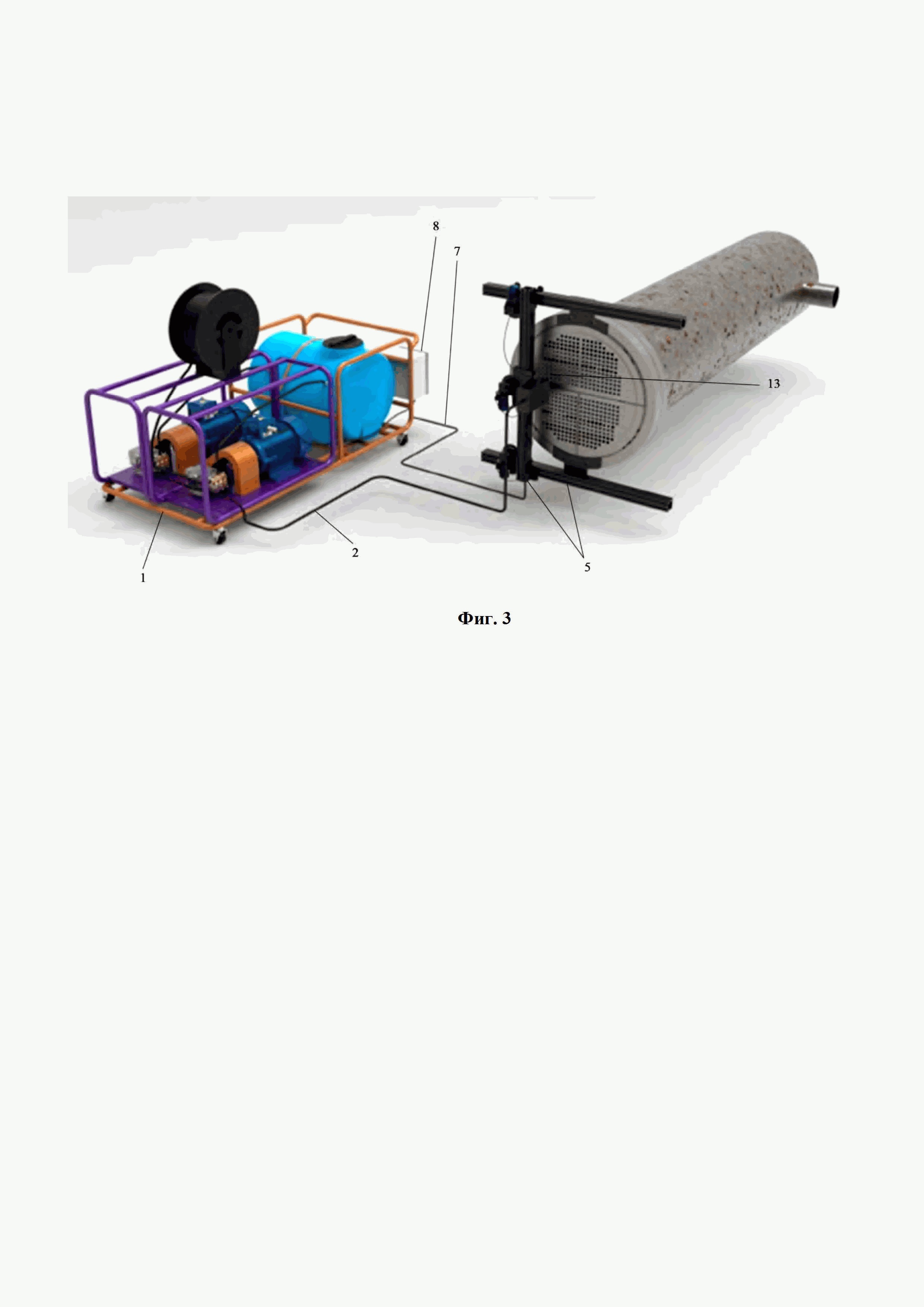
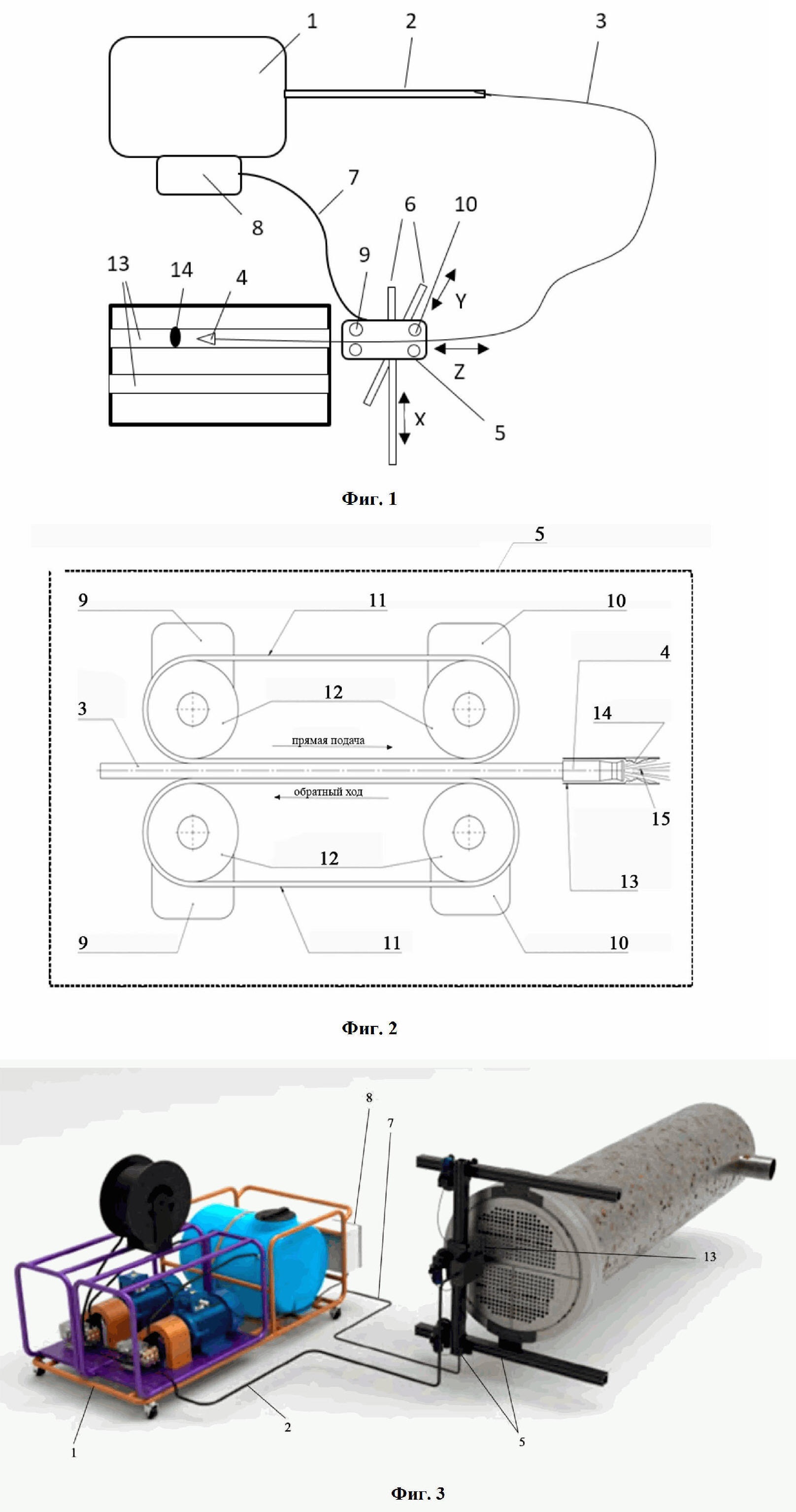
Сущность комплекса микрогидроударной очистки внутренней поверхности труб теплообменного агрегата иллюстрируется следующими рисунками, где на фиг. 1 представлена функциональная схема автоматизированного комплекса микрогидроударной очистки труб с цифровым блоком управления; на фиг. 2 - механизм продольного возвратно - поступательного перемещения выдвижной пустотелой штанги, оснащенного электродвигателем и дифференциальным датчиком местоположения штанги и скорости её движения; на фиг. 3 – фотография экспериментального образца комплекса микрогидроударной очистки, соединенного с трубами теплообменного агрегата.
На чертежах позициями обозначено:
1 – насосная установка высокого давления, генерирующая напор воды с давлением 180-500 бар и расходом 12-40 литров в минуту. Установка приводится в действие электрическим мотором (на фиг. не показано).
Электромеханический робот очистки, включает:
2 – шланг высокого давления, передающий поток жидкости под высоким давлением к насадке. Шланг имеет длину до 80 метров;
3 – выдвижная пустотелая штанга, в виде полужесткого шланга, из упругого материала длинной до 15 метров, соединяющая шланг 2 высокого давления с насадкой микрогидроударного очистителя накипи, предназначенной для непосредственной очистки труб;
4 – подвижная насадка микрогидроударного очистителя, преобразующая поток жидкости высокого давления в распыляемый конус, производящий очистку засоров и отложений на внутренних поверхностях труб;
5 – механизм продольного обратно - поступательного перемещения штанги 3 вдоль оси Z;
6 – механизм двухкоординатного перемещения и позиционирования выдвижной пустотелой штанги по осям X, Y;
7 – канал обратной связи в виде сигнального кабеля;
8 – цифровой блок управления, в виде управляющего контроллера или микроЭВМ, монтируется на насосной установке 1 и представляет собой промышленный компьютер с программой управления, обеспечивающий перемещение выдвижной пустотелой штанги 3 на расстояние по заданной программе, осуществляющий контроль скорости перемещения с помощью датчиков перемещения;
9 – дифференциальные датчики перемещения выдвижной пустотелой штанги 3, передающие сигналы по кабелю 7 обратной связи в цифровой блок 8 управления, контролирующие по заданной программе перемещение выдвижной пустотелой штанги 3;
10 – реверсивные электродвигатели перемещения, обеспечивающие по заданной программе линейное перемещение выдвижной пустотелой штанги 3 с насадкой 4 на ее конце;
11 – приводной ремень механизма 5 продольного обратно - поступательного перемещения;
12 – направляющие ролики, по которым производится перемещение выдвижной пустотелой штанги 3;
13 – очищаемая труба теплообменного агрегата;
14 – место засора;
15 – область микрогидроударного воздействия
Механизмы 5 и 6 двухкоординатного продольного и поперечного перемещения выдвижной пустотелой штанги 3 от приводов реверсивных электродвигателей 10 перемещения, а также - дифференциальный датчик 9 перемещения и скорости её движения соединены по сигнальному выходу с цифровым блоком 8 управления.
Комплекс микрогидроударной очистки внутренней поверхности труб теплообменного агрегата работает следующим образом.
Перед началом работ производят первичное программирование системы с учетом числа очищаемых труб 13, а также их геометрическое расположение. Также программируют уровень допустимых остаточных загрязнений на поверхности труб 13 (количество, протяжённость, глубина слоя загрязнений). Комплекс в работу запускает управляющая программа цифрового блока 8 управления. Механизм 5 продольного обратно - поступательного перемещения осуществляет перемещение выдвижной пустотелой штанга 3 с установленной на ней насадкой 4 вдоль очищаемой трубы 13. Механизм двухкоординатного перемещения и позиционирования 6 обеспечивает перемещение выдвижной пустотелой штанги от одной трубы 13 к другой. При обнаружении места 14 засора остаточных загрязнений, величина которых превышает допустимую, с определением глубины каждого места 14 засора иеё протяжённости, подается сигнал от дифференциальных датчиков 9 перемещения по каналу 7 обратной связи на цифровой блок 8 управления, который подает сигнал реверсивным электродвигателям 10 перемещения для возвратного – поступательного перемещения штанги 3 на заданное расстояние при помощи механизма 5 и повторного перемещения штанги 3 с наконечником 4 к обнаруженному месту 14 засора для повторного воздействия микрогидроударного воздействия на место 14 засора. При замедлении скорости подачи насадки 4 менее установленного порога, программа цифрового блока 8 управления запускает алгоритм повторной очистки.
Возможность контроля за проведением очистки труб теплообменного агрегата, повышает производительность очистки за счет возможности своевременного повторного микрогидроударного воздействия на место засора, без остановки запущенного процесса.
В настоящее время комплекс микрогидроударной очистки внутренней поверхности труб теплообменного агрегата находится на стадии экспериментального образца.
Реферат
Изобретение относится к устройствам, предназначенным для чистки внутренних поверхностей труб. Комплекс микрогидроударной очистки внутренней поверхности труб теплообменного агрегата содержит подвижную насадку микрогидроударного очистителя, шланг высокого давления и насосную станцию. Комплекс дополнительно содержит электромеханический робот очистки с числовым программным управлением, выдвижная пустотелая штанга которого выполнена из упругого материала и соединена по входу через шланг высокого давления с выходом насосной станции, а по выходу - с подвижной насадкой. Электромеханический робот очистки содержит также механизмы и двухкоординатного продольного и поперечного перемещения штанги от приводов соответствующих реверсивных электродвигателей с возможностью ее позиционирования, а также дифференциальный датчик местоположения штанги и скорости её движения, соединенный по сигнальному выходу с сигнальным входом электромеханического робота очистки, управляющие выходы которого соединены с управляющими входами соответствующих электродвигателей. Техническим результатом изобретения является повышение производительности и качества гидродинамической очистки внутренней поверхности труб теплообменных агрегатов на основе микрогидроударного эффекта. 2 з.п. ф-лы, 3 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство и способ для гидродинамической очистки поверхностей на основе микрогидроударного эффекта
Комментарии