Устройство для транспортировки контейнеров из пластмассы - RU2686148C2
Код документа: RU2686148C2
Чертежи





Описание
Область техники
Изобретение относится к устройству для перемещения контейнеров из пластмассы, например, преформ из термопластичного материала, такого как ПЭТ или любого другого подходящего материала, используемого в процессах пневмоформования, например, при вытяжке с раздувом.
Уровень техники
Известны различные типы устройств для транспортировки изготовленных из пластмассы контейнеров. В частности, известны транспортировочные устройства для транспортировки преформ из термопластичного материала по существу цилиндрической формы по заданной траектории в системе пневмоформования готовых контейнеров.
Обычно, линия с закрепленными на ней транспортировочными устройствами числом «n» перемещается вдоль траектории, пересекающей по меньшей мере одну зону термообработки преформ, так что эти заготовки достигают оптимальной температуры, необходимой для последующего пневмоформования или вытяжки с раздувом.
Известные транспортировочные устройства работают вдоль указанной траектории только на двух уровнях высоты или на двух высотах, и установка преформы в указанные устройства и последующее снятие с указанного устройства могут быть достаточно сложными.
Таким образом, существует необходимость в создании усовершенствованного устройства для транспортировки контейнеров из пластмассы, в котором были бы устранены вышеуказанные недостатки.
Раскрытие изобретения
Задачей изобретения является создание устройства для транспортировки контейнеров из пластмассы, обладающего более высокой эффективностью по сравнению с известными транспортировочными устройствами.
Другой задачей изобретения является создание устройства для транспортировки контейнеров, содержащего меньшее количество компонентов, чем известные транспортировочные устройства.
Поставленные задачи решаются в устройстве для транспортировки контейнера из пластмассы, в частности, преформы для производства готового контейнера посредством операции выдувания, содержащего:
- опорную раму, установленную с возможностью скольжения по заданной траектории и включающую в себя первое плечо с первым направляющим отверстием и второе плечо со вторым направляющим отверстием;
- продольный стержень с продольной осью X, проходящий через указанные первое и второе направляющие отверстия, оси которых соосны указанной оси X, с возможностью перемещения вдоль этой оси X и/или вращения вокруг указанной оси X; и
- захват, прикрепленный к первому концу продольного стержня и выполненный с возможностью захвата и удержания конца транспортируемого контейнера;
средство регулировки шага перемещения продольного стержня и захвата вдоль указанной оси X, причем указанный шаг имеет заданную максимальную величину, а указанное средство регулировки выполнено с возможностью обеспечения первого перемещения захвата вниз с первым шагом c1 из исходного положения L0 в положение захвата L1, в котором контейнер захвачен захватом; второго перемещения захвата вместе с контейнером вверх из указанного положения захвата L1 в исходное положение L0 и третьего перемещение захвата вверх на второй шаг c2 из исходного положения L0 в свободное положение L2 для освобождения контейнера от указанного захвата.
Устройство характеризуется тем, что диаметр центрального участка (15) продольного стержня (20) меньше диаметра примыкающих к нему участков, причем этот центральный участок ограничен первым (15') и вторым (15'') упорами, выполненными на стержне (20), а средство регулировки содержит два кольцевых элемента (4, 6), соосно расположенных снаружи центрального участка (15), причем наружный диаметр этих кольцевых элементов больше диаметра первого (24') и второго (25') направляющих отверстий, и первый упругий элемент (5), расположенный вдоль центрального участка (15) между указанными двумя кольцевыми элементами (4, 6), при этом когда продольный стержень (20) не перемещается вдоль оси (X), два кольцевых элемента (4,6) и первый упругий элемент (5) удерживают захват (22) в исходном положении (L0).
Устройство характеризуется тем, что за счет усилия, создаваемого первым упругим элементом (5), в исходном положении (L0) первый кольцевой элемент (4) уперт в первый упор (15') и/или в первое плечо (24), а второй кольцевой элемент (6) уперт во второй упор (15'') и/или во второе плечо (25); в положении захвата (L1) часть центрального участка (15) входит во второе направляющее отверстие (25'), первый кольцевой элемент (4) смещен вниз первым упором (15'), а второй кольцевой элемент (6) уперт во второе плечо (25); а в свободном положении (L2) часть центрального участка (15) входит в первое направляющее отверстие (24'), второй кольцевой элемент (6) поднят вторым упором (15''), а первый кольцевой элемент (4) уперт в первое плечо (24).
Устройство характеризуется тем, что внутренняя поверхность кольцевых элементов (4, 6) выполнена с возможностью скольжения по внешней поверхности центрального участка (15) стержня (20).
Устройство характеризуется тем, что длина центрального участка (15) вдоль оси (X) равна или меньше расстояния между первым (24) и вторым (25) плечами.
Устройство характеризуется тем, что первый упругий элемент (5) выполнен так, что его максимальная деформация cmax равна либо указанной величине первого шага (c1), которая представляет собой перемещение первого кольцевого элемента (4) при смещении стержня (20) вниз, либо величине второго шага (c2), которая представляет собой перемещение второго кольцевого элемента (6) при смещении стержня (20) вверх.
Устройство характеризуется тем, что, когда стержень (20) находится в исходном положении (L0), величины первого (c1) и второго (c2) шагов меньше расстояния между первым и вторым кольцевыми элементами (4, 6).
Устройство характеризуется тем, что длина первого шага (c1) равна длине второго шага (c2).
Устройство характеризуется тем, что содержит подвижный предохранитель (11), имеющий торцевую пластину (11') с отверстием (31), в которое может входить по меньшей мере часть контейнера и захвата (22), при их перемещении вдоль указанной оси (X), и соединенный с опорной рамой (3) с возможностью скольжения параллельно указанной оси (X) для перемещения указанной торцевой пластины (11') из первого положения, удаленного от опорной рамы (3), во второе положение, расположенное рядом с опорной рамой (3).
Устройство характеризуется тем, что исходное положение (L0) либо находится рядом, либо совпадает с указанным первым положением торцевой пластины (11').
Устройство характеризуется тем, что подвижный предохранитель (11) выполнен с возможностью скольжения по одному или нескольким вертикальным стержням (13), жестко прикрепленным к концу опорной рамы (3), предпочтительно, к концу второго плеча (25).
Устройство характеризуется тем, что подвижный предохранитель (11) представляет собой конструкцию (30), первый конец которой соединен с одним или несколькими вертикальными стержнями (13) с возможностью скольжения по ним, а на втором конце конструкции (30) закреплена торцевая пластина (11').
Устройство характеризуется тем, что указанная конструкция (30) содержит первый скользящий элемент (10), приспособленный для скольжения по криволинейной поверхности, при этом между этой конструкцией (30) и опорной рамой (3) расположен второй упругий элемент (9), так что торцевая пластина (11') удерживается посредством указанного второго упругого элемента (9) в своем первом положении, а при поднятом при скольжении по соответствующей криволинейной поверхности первом скользящем элементе (10) торцевая пластина (11') поднимается в свое второе положение, сжимая при этом второй упругий элемент (9).
Устройство характеризуется тем, что содержит расположенный на втором конце стержня (20) над захватом (22) фиксатор (21) для удаления и установки захвата другой формы.
Устройство характеризуется тем, что содержит выталкивающее приспособление для выталкивания контейнера из захвата, содержащее по меньшей мере один трубчатый элемент (7, 8) соосный оси (X) и окружающий захват (22), первый конец которого жестко прикреплен ко второму плечу (25), а второй конец приспособлен для вступления в контакт с верхней кромкой контейнера для его перемещения при переходе из исходного положения (L0) в свободное положение (L2); и направляющий элемент (14), прикрепленный к нижнему концу стержня (20) и выполненный с возможностью скольжения внутри по меньшей мере одного трубчатого элемента (7, 8) для осевого и радиального направления стержня (20) и захвата (22).
Устройство характеризуется тем, что содержит элементы (1, 2) передачи для передачи вращательного и/или поступательного движения продольному стержню (20), при этом указанные элементы (1, 2) передачи выполнены в виде единого целого со вторым концом продольного стержня (20).
Другим объектом изобретения является конвейерная линия для перемещения контейнеров из пластмассы, содержащая множество звеньев, каждое из которых содержит по меньшей мере одно указанное выше устройство для транспортировки.
Еще одним объектом изобретения является способ работы указанного устройства для транспортировки, включающий в себя этапы, на которых:
а) устанавливают продольный стержень в исходное положение L0;
б) перемещают продольный стержень вдоль оси X вниз из указанного исходного положения L0 в положение захвата L1, в котором контейнер захватывают захватом;
в) перемещают продольный стержень вдоль оси X вверх из положения захвата L1 в исходное положение L0; и
г) перемещают продольный стержень вдоль оси X вверх из исходного положения L0 в свободное положение L2 для освобождения контейнера от захвата).
Способ также характеризуется тем, что используют подвижный предохранитель (11), содержащий торцевую пластину (11') с отверстием (31), в которое может входить по меньшей мере часть контейнера и захвата (22) при их перемещении вдоль указанной оси (X), причем указанный подвижный предохранитель (11) соединен с опорной рамой (3) с возможностью скольжения параллельно указанной оси (X) для смещения торцевой пластины (11') из первого положения, удаленного от опорной рамы (3), во второе положение, расположенное рядом с опорной рамой (3), при этом:
на этапе а) торцевая пластина (11') находится в своем первом положении;
на этапе б) по меньшей мере один конец контейнера (12) вводят в отверстие (31) торцевой пластины (11') в ее первом положении; а
между этапами в) и г) торцевую пластину (11') перемещают вдоль оси (X) вверх из ее первого положения в ее второе положение для выхода из зоны указанного конца контейнера.
Таким образом, устройство согласно изобретению может работать на трех рабочих уровнях, а именно:
- на уровне захвата L1, на котором захват входит внутрь верхней части транспортируемого контейнера;
- на исходном уровне L0, на котором контейнер удерживается захватом;
- на свободном уровне L2, на котором захват перемещается вверх, освобождая контейнер.
Предпочтительно, устройство для транспортировки работает только на вышеуказанных трех рабочих уровнях L1, L0 и L2.
Все известные устройства для транспортировки, используемые в установках и в технологии вытяжки с раздувом работают только на двух уровнях, поскольку исходный уровень совпадает с одним из других уровней (уровнем захвата или свободным уровнем). Использование трех разных рабочих уровней в сочетании с вертикальным перемещением возможного подвижного предохранителя для защиты горлышка контейнера обеспечивает по сравнению с известными устройствами преимущества, заключающиеся в упрощении операций вставки и захвата контейнеров.
Другое усовершенствование заключается в принципе работы с двумя соосно установленными кольцевыми элементами с проходящим через них стержнем, расположенными снаружи центрального участка этого стержня, при этом между указанными кольцевыми элементами расположен первый упругий элемент. Действительно, первый упругий элемент обеспечивает лишь однократное перемещение на шаг c1 при смещении стержня вниз из исходного положения, или от уровня L0, и на шаг c2 при перемещении стержня вверх из исходного положения, или от уровня L0. Точки покоя первого упругого элемента и кольцевых элементов могут изменяться для каждого перемещения вверх или вниз, обеспечивая возможность регулировки относительно внутренней поверхности первого или второго плеча опорной рамы и упоров продольного стержня, ограничивающих его центральный участок. Первый упругий элемент выполнен так, что его максимальная деформация cmax может равняться величине шагов c1 или c2 в зависимости от того, какой из них больше, но не может равняться сумме этих шагов, т.е. (c1+c2). В одном из вариантов выполнения шаг c1 может равняться шагу c2. Единственная функция первого упругого элемента заключается в удержании продольного стержня на исходном уровне L0.
Одним из преимуществ устройства согласно изобретению является меньшее количество составных элементов. Фактически, такое устройство для транспортировки может использоваться без выталкивающего приспособления, называемого выталкивающей муфтой. Действительно, такое выталкивающее приспособление включает в себя по меньшей мере один трубчатый элемент, внутри которого скользит внутренний направляющий элемент, прикрепленный к нижнему концу продольного стержня, для осевого и радиального направления продольного стержня и устройства для зажима или захвата преформы, которые должны быть точно отцентрированы относительно указанного трубчатого элемента, чтобы избежать контакта между различными металлическими частями. При использовании устройства для транспортировки без выталкивающего приспособления, т.е. без наружного трубчатого элемента и внутреннего направляющего элемента, освобождение контейнера из захвата, входящего внутрь горлышка, происходит благодаря удерживающему усилию, создаваемому, например, боковыми зажимными губками, взаимодействующими с наружной поверхностью горлышка, которые являются частью колеса для транспортировки контейнеров.
Вместо этого оно может выполнять функцию вышеуказанного выталкивающего приспособления в случаях, когда преформы имеют горлышко сложной формы, или ограниченную зону захвата для зажимных губок. В таких случаях освобождение преформ из захвата посредством одних только зажимных губок может быть очень важным.
Однако в варианте выполнения устройства с внутренним направляющим элементом и наружным трубчатым элементом достигается преимущество по сравнению с известными устройствами, имеющими выталкивающее приспособление и только два рабочих уровня захвата, которое заключается в том, что выталкивающее приспособление согласно изобретению больше не должно обязательно располагаться заподлицо с верхним краем горлышка контейнера, следовательно, устраняются проблемы, связанные с прохождением нестабильной, вибрирующей заготовки с высокой скоростью под захватом. Действительно, в известных устройствах преформа обычно удерживается на уровне захвата L1 зажимным кольцом, выталкивающее приспособление расположено заподлицо с верхним краем горлышка заготовки, а захват или зажим начинает перемещаться от исходного уровня L0 и смещается вниз для захвата заготовки на уровне захвата L1. Затем захват поднимается на исходный уровень L0 для выталкивания заготовки, что осуществляется посредством удара о нижний конец выталкивающего приспособления. Поскольку в этой известной конфигурации преформа не перемещается относительно выталкивающего приспособления, головка или выталкивающее приспособление всегда должно находиться заподлицо с верхним краем горлышка.
Предпочтительные варианты выполнения устройства приведены в зависимых пунктах формулы и являются неотъемлемой частью описания.
Другие особенности и преимущества изобретения станут более понятны из дальнейшего описания одного из вариантов его осуществления со ссылками на чертежи.
Краткое описание чертежей
На фиг. 1 показано устройство согласно первому варианту осуществления изобретения, вид в перспективе;
на фиг. 2 - то же, другой вид в перспективе;
на фиг. 3 - то же, вид в разрезе;
на фиг. 4 - фрагмент фиг. 3 в увеличенном масштабе;
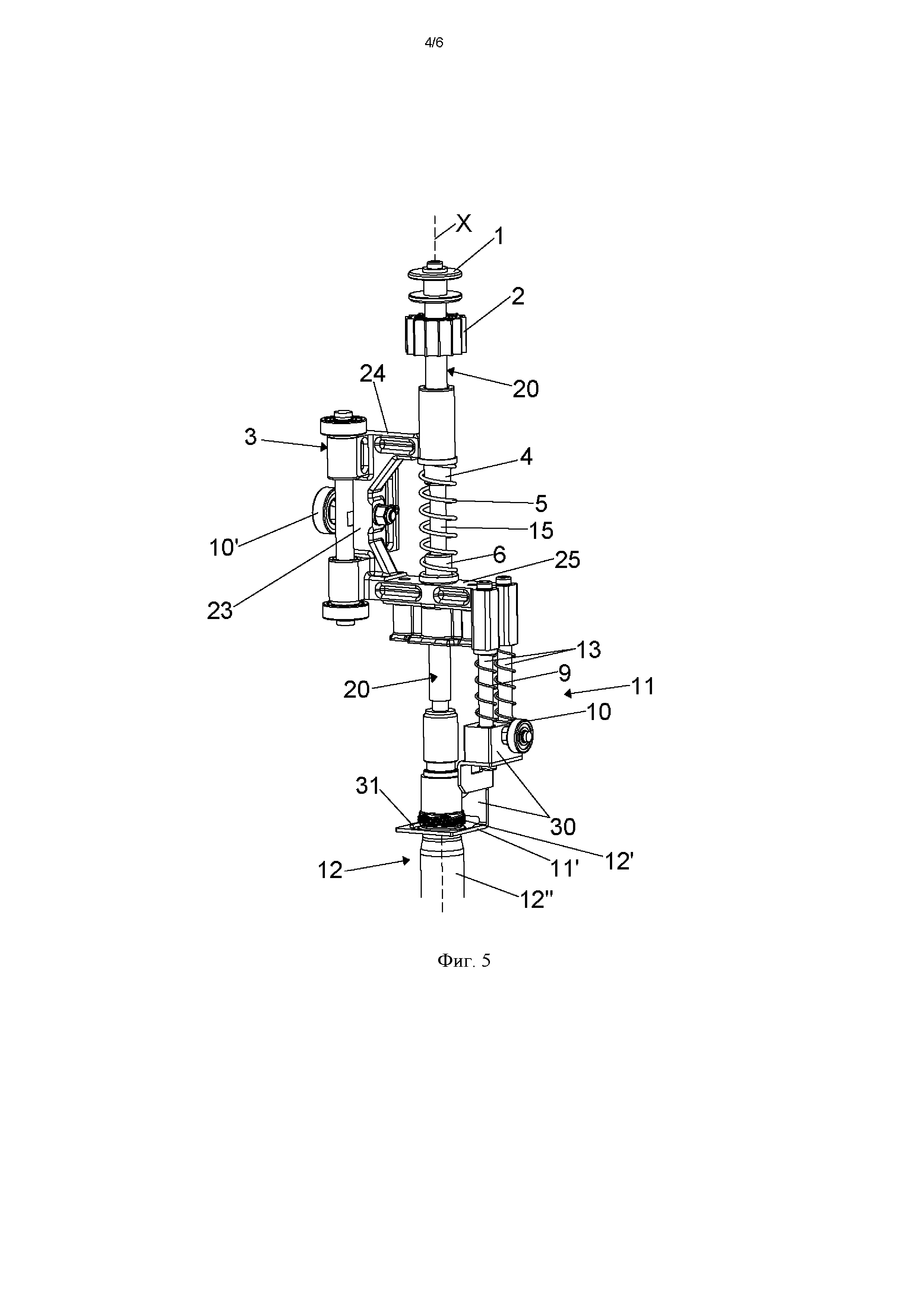
на фиг. 5 - устройство согласно второму варианту осуществления изобретения, вид в перспективе;
на фиг. 6 показана последовательность технологических этапов, выполняемых устройством по фиг. 1;
на фиг. 7 - последовательность технологических этапов, выполняемых устройством по фиг. 5.
Одинаковые элементы или компоненты устройств на чертежах обозначены одинаковыми позициями.
Осуществление изобретения
На чертежах показаны два варианта выполнения устройства для транспортировки контейнеров из пластмассы, например, преформ из ПЭТ (полиэтилентерефталата) или любого другого подходящего термопластичного материала.
Понятия «выше» или «ниже» используются в настоящем описании только для того, чтобы охарактеризовать положение показанных на чертежах элементов, и не ограничивают объем изобретения. Кроме того, в описании рассматривается преформа, представляющая собой выполненный из пластмассы контейнер, но это не исключает возможности использования устройства согласно изобретению для транспортировки контейнеров по существу цилиндрической формы, отличных от указанных преформ.
На фиг. 1-4 показано транспортировочное устройство в соответствии с первым вариантом осуществления изобретения.
Устройство содержит:
- опорную раму 3, выполненную с возможностью перемещения вдоль направляющей или криволинейной поверхности по заданной траектории и снабженную, например, сбоку, по меньшей мере одним скользящим элементом 10', например, роликом или другим аналогичным элементом, для скольжения по указанной траектории;
- продольный стержень 20, определяющий продольную ось X и установленный в направляющих отверстиях 24', 25 опорной рамы 3 с возможностью вертикального скольжения вдоль оси X;
- зажим или захват 22, расположенный на нижнем конце стержня 20 и приспособленный для захвата и удержания преформы при ее перемещении по вышеуказанной траектории;
- фиксатор 21 захвата, расположенный на нижнем конце стержня 20 над захватом 22 и приспособленный для удаления и установки захвата другой формы;
- первый элемент 1 передачи, расположенный на верхнем конце стержня 20 для передачи поступательного движения стержню 20 вдоль оси X;
- второй элемент 2 передачи, расположенный на верхнем конце стержня 20 для передачи вращательного движения стержню 20 вокруг оси X;
- средство регулировки поступательного хода продольного стержня 20 и захвата 22 для обеспечения возможности работы захвата 22 на трех рабочих уровнях или положениях, а именно в первом исходном положении L0; во втором положении захвата L1, находящемся ниже первого положения, и в третьем свободном положении L2, находящимся выше первого положения.
Возможно наличие подвижного предохранителя 11 для защиты горлышка преформы от нагревания во время термообработки, осуществляемой при перемещении по указанной траектории. Указанный предохранитель 11 соединен с опорной рамой 3 и может вертикально перемещаться вдоль оси X при перемещении по меньшей мере второго скользящего элемента 10, например, ролика или другого аналогичного элемента, по дополнительной направляющей или криволинейной поверхности.
Указанный второй скользящий элемент 10 по существу выполняет функцию кулачкового толкателя, при работе устройства следующего по криволинейной поверхности (не показана), задающей вертикальное перемещение подвижного предохранителя 11. Этот элемент будет описан ниже.
Предпочтительно, но не обязательно, опорная рама 3 имеет по существу С-образную конструкцию.
Корпус 23 рамы 3 расположен снаружи, и из него выступает скользящий элемент 10'.
В первом плече 24 С-образной рамы 3 выполнено первое направляющее отверстие 24', соосное оси X, через которое проходит стержень 20.
Во втором плече 25 С-образной рамы 3 выполнено второе направляющее отверстие 25', соосное оси X, через которое проходит стержень 20.
Таким образом, первое и второе направляющие отверстия 24' и 25' имеют единую ось, совпадающую с продольной осью X.
Диаметр центрального участка 15 продольного стержня 20 меньше диаметра примыкающих к нему участков, которые всегда соосны оси X. Центральный участок 15 ограничен верхним и нижним упорами 15' и 15'', выполненными на стержне 20. Длина центрального участка 15 по существу равна расстоянию между первым и вторым плечами 24 и 25 рамы 3 по оси X или меньше этого расстояния.
Предпочтительно указанное средство регулировки шага перемещения стержня 20 содержит два кольцевых элемента 4 и 6, расположенных соосно снаружи центрального участка 15 стержня 20, и первый упругий элемент 5, например, винтовую или другую пружину сжатия, концы которой прикреплены к соответствующим кольцевым элементам 4, 6 для прижатия их в исходном положении L0 устройства к соответствующим упорам 15', 15'' посредством усилия пружины. Внутренняя поверхность кольцевых элементов 4, 6 может скользить по внешней поверхности центрального участка 15 стержня 20. При перемещении вдоль оси X стержень 20 скользит внутри одного из указанных кольцевых элементов, при этом другой кольцевой элемент перемещается вместе со стержнем 20.
В частности, два кольцевых элемента 4 и 6 имеют кольцевые выступы 4' и 6', наружный диаметр которых больше диаметра направляющих отверстий 24' и 25'. В качестве альтернативы, кольцевые элементы 4 и 6 могут быть цилиндрическими и не иметь выступов, но их диаметр должен быть больше диаметра направляющих отверстий.
При такой конфигурации, когда стержень 20 находится в исходном положении, кольцевой выступ 4' или кольцевой элемент 4 в целом упирается одновременно в упор 15' и в плоскую поверхность первого плеча 24 рамы 3, а кольцевой выступ 6' или кольцевой элемент 6 в целом упирается одновременно в упор 15'' и в плоскую поверхность второго плеча 25 рамы 3.
Когда стержень 20 перемещается вниз вдоль оси X, часть центрального участка 15 входит в направляющее отверстие 25', кольцевой элемент 4 опускается под действием верхнего упора 15', а кольцевой элемент 6 остается неподвижным, упираясь во второе плечо 25, так что стержень 20 скользит через указанный кольцевой элемент 6.
Если стержень 20 перемещается вверх вдоль оси X, часть центрального участка 15 входит в направляющее отверстие 24', кольцевой элемент 6 поднимается под действием нижнего упора 15'', а кольцевой элемент 4 остается неподвижным, упираясь в первое плечо 24, так что стержень 20 скользит через указанный кольцевой элемент 4.
Предпочтительно, конструкция упругого элемента 5, удерживаемого между двумя кольцевыми элементами 4, 6, выбрана так, что его максимальная деформация cmax равна либо величине c1, являющейся шагом кольцевого элемента 4 при смещении стержня 20 вниз, либо величине c2, являющейся шагом кольцевого элемента 6 при смещении стержня 20 вверх. В одном из вариантов выполнения величины c1 и c2 равны. В любом случае величины шагов c1 и c2 всегда должны быть меньше расстояния между двух кольцевых элементов 4, 6, когда стержень 20 находится в исходном положении или на уровне L0.
Что касается подвижного предохранителя 11, то он установлен с возможностью скольжения ниже внешнего края второго плеча 25, например, он может скользить по одной или нескольким направляющим 13, установленным параллельно оси X на соответствующем расстоянии от нее и жестко прикрепленным к наружному краю второго плеча 25.
В частности, подвижный предохранитель 11 включает в себя конструкцию 30, на которой установлен скользящий элемент 10. Конструкция 30 своей верхней частью соединена с вертикальными, предпочтительно двумя, стержнями 13, с возможностью скольжения по ним, а к ее нижнему концу прикреплена торцевая пластина 11'.
Торцевая или защитная пластина 11', например, имеет прямоугольную форму, расположена по существу перпендикулярно оси X и имеет отверстие 31, например, круглое, диаметр которого превышает максимальный наружный размер горлышка преформы в направлении, перпендикулярном направлению ее продольной оси. Таким образом, диаметр отверстия 31, как правило, больше максимально выступающего наружного диаметра зажимного кольца преформы, следовательно, горлышко преформы 12 при перемещении вдоль своей продольной оси может проходить через отверстие 31, не задевая за его края.
Защитная пластина 11' удерживается в своем нижнем положении, так называемом положением защиты, посредством второго упругого элемента, например, по меньшей мере одной винтовой пружины 9, установленной вокруг по меньшей мере одного вертикального стержня 13, причем концы этой пружины прикреплены, соответственно, ко второму плечу 25 и к конструкции 30. В своем нижнем положении пластина 11' расположена на высоте, при которой она отделяет и защищает горлышко 12' преформы 12, удерживаемой в положении L0 захватом 22, от воздействия тепла, выделяемого нагревающим средством на по меньшей мере одном участке траектории прохождения преформы, и обращена к корпусу 12'' преформы. Таким образом, механические элементы, являющиеся важными элементами для последующего этапа транспортировки посредством зажимных губок, удерживают горлышко преформы до момента ее преобразования в готовый контейнер в процессе вытяжки с раздувом. И наоборот, когда скользящий элемент 10 поднимается, скользя по соответствующей криволинейной поверхности, пластина 11' поднимается в свое верхнее положение, обеспечивая доступ к преформе захватного элемента 40, который снимает эту преформу с транспортировочного устройства. Упругий элемент 9 сжимается в указанном верхнем положении между конструкцией 30 и вторым плечом 25 опорной рамы 3.
В первом варианте осуществления изобретения устройство также включает в себя выталкивающее приспособление для выталкивания преформы из захвата.
Это выталкивающее приспособление содержит:
- первый трубчатый элемент 7, жестко прикрепленный своим верхним концом ко второму плечу 25 опорной рамы 3;
- второй трубчатый элемент 8, прикрепленный к нижнему концу первого трубчатого элемента 7 и окружающий захват 22, причем нижняя плоская кромка второго трубчатого элемента выполнена с возможностью контакта с верхней плоской кромкой транспортируемой преформы, а форма второго трубчатого элемента соответствует форме горлышка преформы;
- направляющий элемент 14, прикрепленный к нижнему концу стержня 20 над фиксатором 21 захвата и установленный с возможностью скольжения внутри первого трубчатого элемента 7 для осевого и радиального направления продольного стержня 20 и захвата 22 преформы.
Первый трубчатый элемент 7, второй трубчатый элемент 8 и направляющий элемент 14 соосны оси X.
Первый трубчатый и второй трубчатые элементы 7 и 8 также могут быть изготовлены в виде единой детали или единого трубчатого элемента, и направляющий элемент 14 скользит внутри этого единого трубчатого элемента.
На фиг. 5 показан второй вариант осуществления изобретения, который по существу аналогичен описанному выше первому варианту, за исключением того, что в устройстве по второму варианту отсутствует выталкивающее приспособление, т.е. в нем отсутствуют первый трубчатый элемент 7, второй трубчатый элемент 8 и внутренний направляющий элемент 14. Таким образом, вышеуказанные элементы следует считать дополнительными. В зависимости от требований, определяемых типом транспортируемых контейнеров, рабочими скоростями, степенью приоритета задачи сокращения расходов, и т.д., может использоваться либо первый, либо второй вариант осуществления изобретения.
Устройство по второму варианту его выполнения при необходимости может содержать дополнительный подвижный предохранитель 11.
Работа устройства по первому варианту осуществления поясняется со ссылкой на фиг. 6.
Этап 0. Стержень 20 с захватом 22 находятся в исходном положении на промежуточном уровне L0, удерживаются в этом положении посредством кольцевых элементов 4 и 6, упирающихся в опорную раму 3, и упоров 15 и 15' стержня 20 под действием усилия, создаваемого упругим элементом 5. Защитная пластина 11' также находится на исходном уровне L0 в своем нижнем положении.
Этап 1. Преформу 12 необходимо поднять и транспортировать в направлении, перпендикулярном продольной оси X стержня 20 и захвата 22, например, опирающегося на транспортировочную звездочку посредством зажимного кольца, причем указанное зажимное кольцо находится на уровне захвата L1 ниже промежуточного уровня L0.
Этап 2. При смещении вертикально вниз элемента 1 передачи стержень 20 также смещается вниз, перемещаясь на шаг c1 по оси X так, что захват 22 достигает уровня захвата L1 и взаимодействует с внутренней поверхностью верхней части или горлышка 12' преформы 12. При этом, кольцевой элемент 4 смещается на расстояние, равное шагу c1, под действием верхнего упора 15', а кольцевой элемент 6 остается неподвижным, контактируя со вторым плечом 25 опорной рамы 3. Пластина 11' во время этого этапа остается на исходном уровне L0.
Этап 3. При смещении элемента 1 передачи вертикально вверх, стержень 20 поднимается по оси X на шаг c1, переводя захват 22, и, следовательно, преформу 12, с уровня захвата L1 на исходный уровень L0. При этом горлышко преформы входит в отверстие 31 защитной пластины 11'. На этом этапе устройство находится в такой же конфигурации, как на этапах 0 и 1 (на уровне L0), а защитная пластина 11' (снова на уровне L0) защищает горлышко 12', которое находится над указанной пластиной 11', от воздействия потока тепла, направленного на корпус 12'' преформы, который расположен под указанной пластиной 11'. В этой конфигурации, устройство скользит посредством по меньшей мере одного скользящего элемента 10' по части пути, образующего траекторию перемещения преформы, на которой эта преформа 12 проходит по меньшей мере через одну зону термообработки, вращаясь вокруг оси X за счет вращения элемента 2 передачи, закрепленного на стержне 20.
Этап 4. Механическое воздействие на скользящий элемент 10, который вращается при скольжении по соответствующей криволинейной поверхности, приводит к подъему только защитного приспособления 11 и, следовательно, пластины 11' на шаг c3, который отличается от c1 или равен c1, пока предохранитель не достигнет своего верхнего положения. При этом упругие элементы 9 сжимаются, и пластина 11' поднимается до тех пор, пока преформа 12 полностью не освободится, в результате чего исчезает эффект разделения преформы на две части. Захват 22 на этом этапе остается на исходном уровне L0.
Этап 5. Как только пластина 11' выходит из зоны, занимаемой преформой 12, которая удерживается захватом 22, захватный элемент 40, например, зажимные губки, установленные на транспортировочном устройстве для извлечения термообработанных преформ, приближается к транспортировочному устройству и захватывает эту преформу 12 за горлышко, например, входя в соответствующую канавку, выполненную между захватным кольцом и резьбой горлышка. На этом этапе захват 22 остается на исходном уровне L0, а пластина 11' остается в своем верхнем положении.
Этап 6. При смещении элемента 1 передачи вверх на шаг c2, равный или отличный от шага c1, стержень 20 и, следовательно, захват 22 поднимаются, и захват достигает уровня L2, который называется уровнем извлечения или освобождения преформы. При подъеме горлышко 12' преформы 12 упирается в нижнюю кромку трубчатого элемента 8, который прекращает свое перемещение вверх, в результате чего преформа 12, зажатая захватным элементом 40, полностью отсоединяется от захвата 22. На этом этапе упругий элемент 5 деформируется на величину, равную шагу c2, поскольку кольцевой элемент 6 смещается вверх на величину, равную c2, под действием нижнего упора 15'' стержня 20, а кольцевой элемент 4 остается неподвижным, контактируя с первым плечом 24 опорной рамы 3. На этом этапе пластина 11' остается в своем верхнем положении.
Этап 7. Захватный элемент 40 отводит преформу 12 от транспортировочного устройства.
Этап 8. На этом этапе, как захват 22, так и защитная пластина 11' возвращаются в исходное положение, т.е. в положение L0, перемещаясь обратно на шаг c2 и c3, соответственно, посредством вертикального перемещения вниз элемента 1 передачи и смещения скользящего элемента 10 вниз по соответствующей криволинейной поверхности. В зависимости от предъявляемых требований, этот этап можно разделить на два разных этапа.
По окончании этапа 8 устройство согласно изобретению находится в том же самом исходном положении, что и на этапе 0, т.е. готово выполнить описанные выше этапы с новой преформой.
Что касается второго варианта выполнения устройства, этапы работы этого устройства, показанные на фиг. 7, идентичны этапам работы устройства по первому варианту, за исключением того, что на этапе 7 стержень 20 и, следовательно, захват 22, поднимаются, и захват 22 достигает уровня освобождения L2. В этом варианте выполнения преформа 12 во время подъема непосредственно блокируется только захватным элементом 40, который взаимодействует с частью горлышка этой преформы. Таким образом, преформа 12 полностью отсоединяется от захвата 22, оставаясь прикрепленной к захватному элементу; упругий элемент 5 деформируется на шаг c2, поскольку кольцевой элемент 6 смещается вверх на величину, равную c2, под действием нижнего упора 15'' стержня 20, а кольцевой элемент 4 остается неподвижным, контактируя с первым плечом 24 опорной рамы 3. На этом этапе пластина 11' остается в своем верхнем положении.
Исходное положение L0 стержня 20, и, следовательно, захвата 22, может не совпадать с нижним положением пластины 11'. В любом случае, оба вышеуказанных положения находятся рядом друг с другом.
Реферат
Группа изобретений относится к устройству для транспортировки контейнера из пластмассы, к конвейерной линии для перемещения контейнера из пластмассы и способу работы устройства. Устройство содержит опорную раму (3), скользящую по заданной траектории; продольный стержень (20) с продольной осью (X), проходящий через направляющие отверстия (24′, 25′), выполненные в опорной раме с возможностью перемещения вдоль указанной оси (X) и/или вращения вокруг этой оси (X). К первому концу продольного стержня (20) прикреплен захват (22) для захвата и удержания конца транспортируемого контейнера. Устройство также имеет привод перемещения продольного стержня (20) и захвата (22) на определенный шаг вдоль указанной оси (X), так что захват (22) может работать на трех рабочих уровнях или в трех положениях, в частности: в первом исходном положении (L0), во втором положении захвата (L1) и в третьем свободном положении (L2). Конвейерная линия для перемещения контейнера из пластмассы содержит множество звеньев, каждое из которых содержит по меньшей мере одно устройство по изобретению. Способ работы устройства для транспортировки включает в себя установку и перемещение стержня вдоль осей для захвата контейнера и его перемещения. Способ осуществляет этапы работы устройства по изобретению. Технический результат, достигаемый при использовании группы изобретений, заключается в том, чтобы при транспортировке контейнера из пластмассы, обладающего более высокой эффективности. 3 н. и 16 з.п. ф-лы, 7 ил.
Комментарии