Способ управления приводом движения лотка загрузочного устройства шахтной печи - SU1143316A3
Код документа: SU1143316A3
Чертежи
Описание
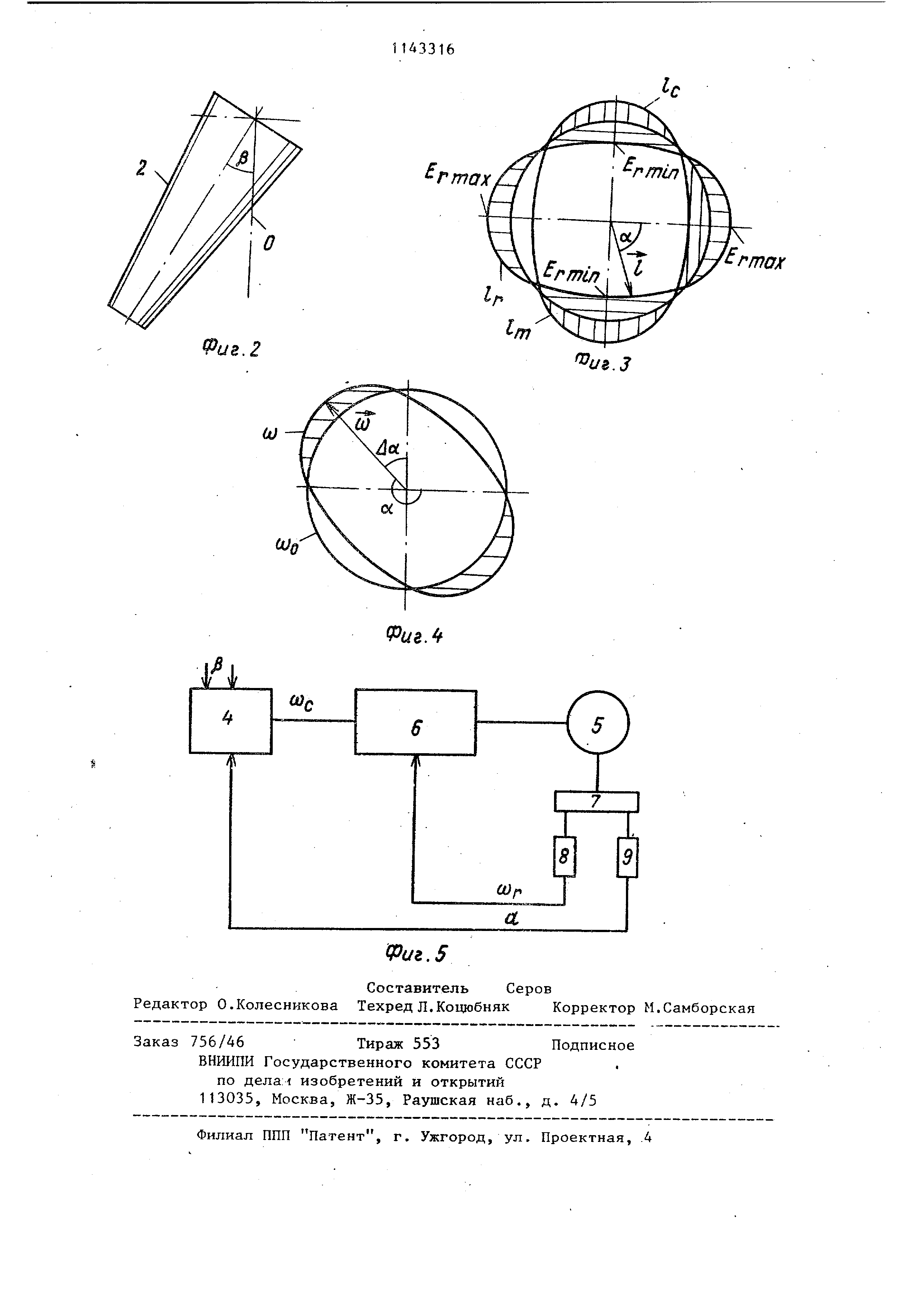
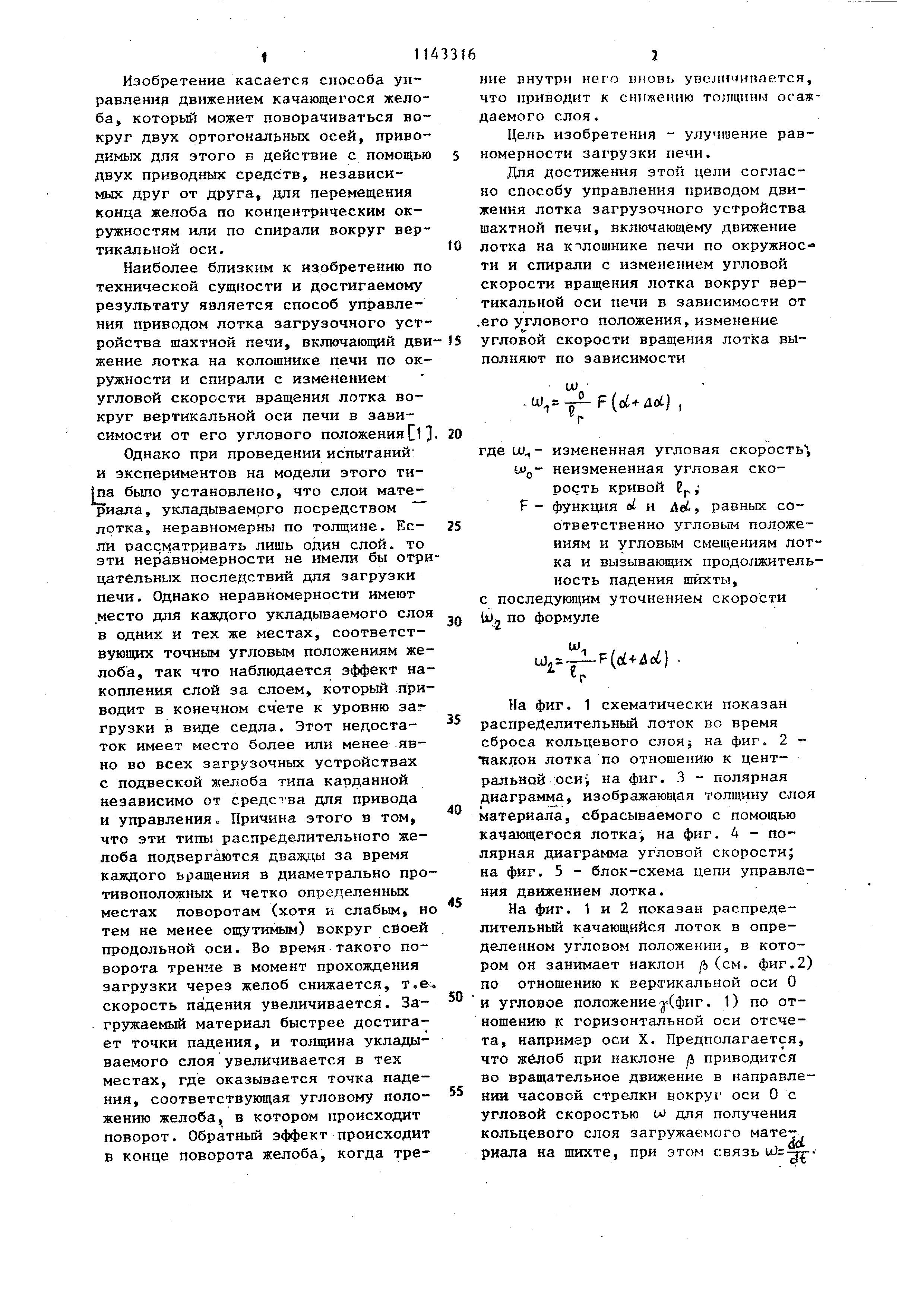
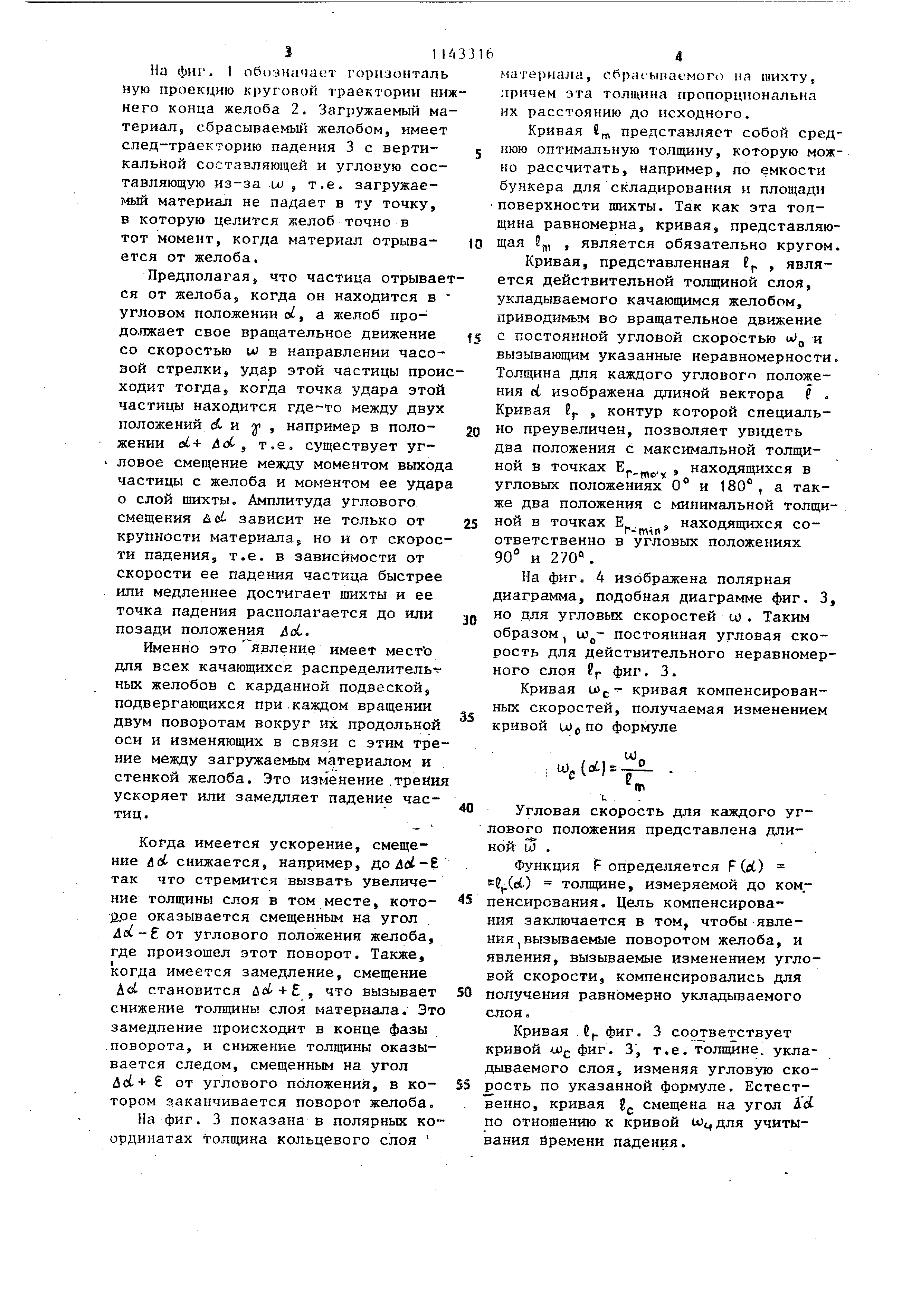
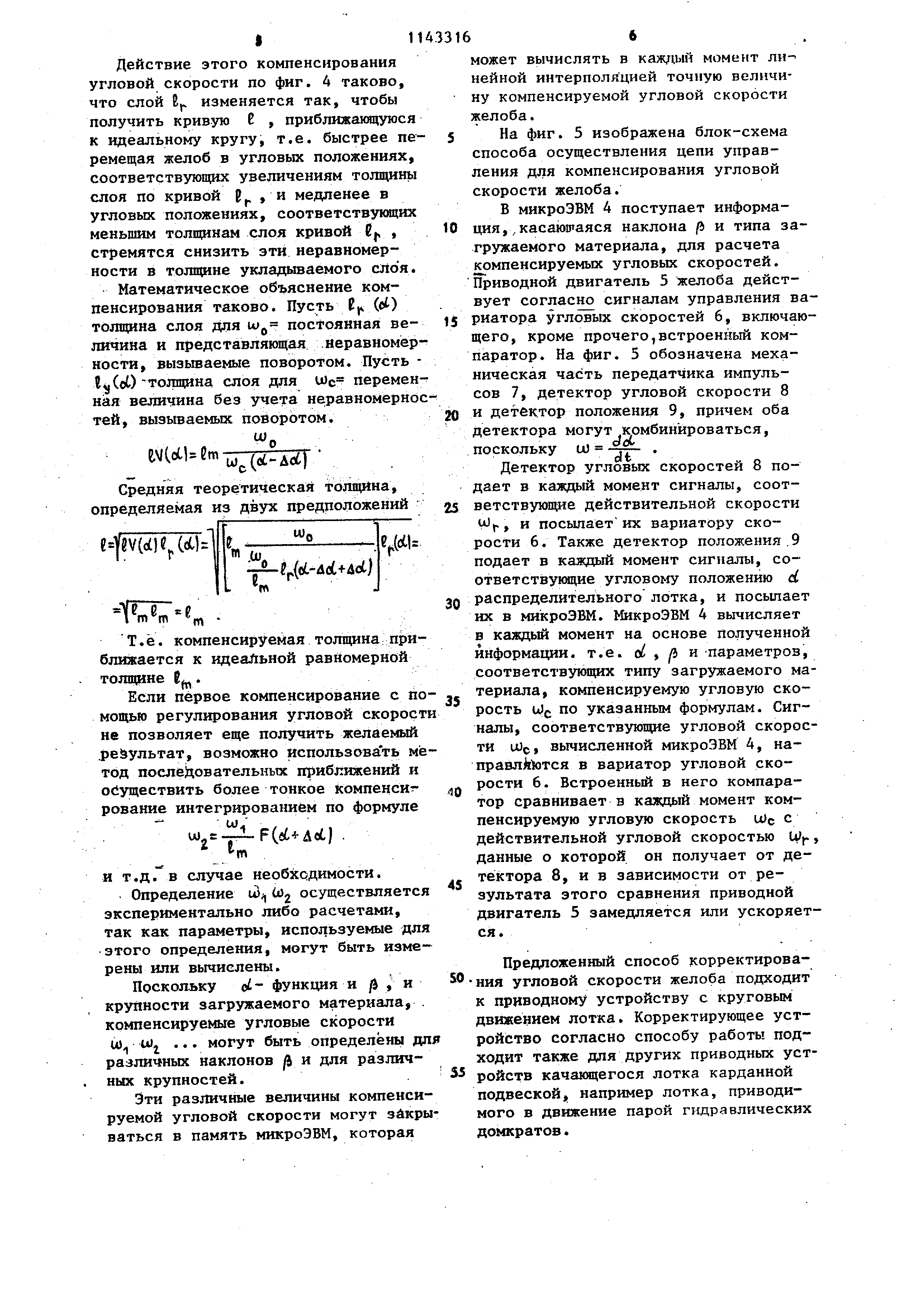
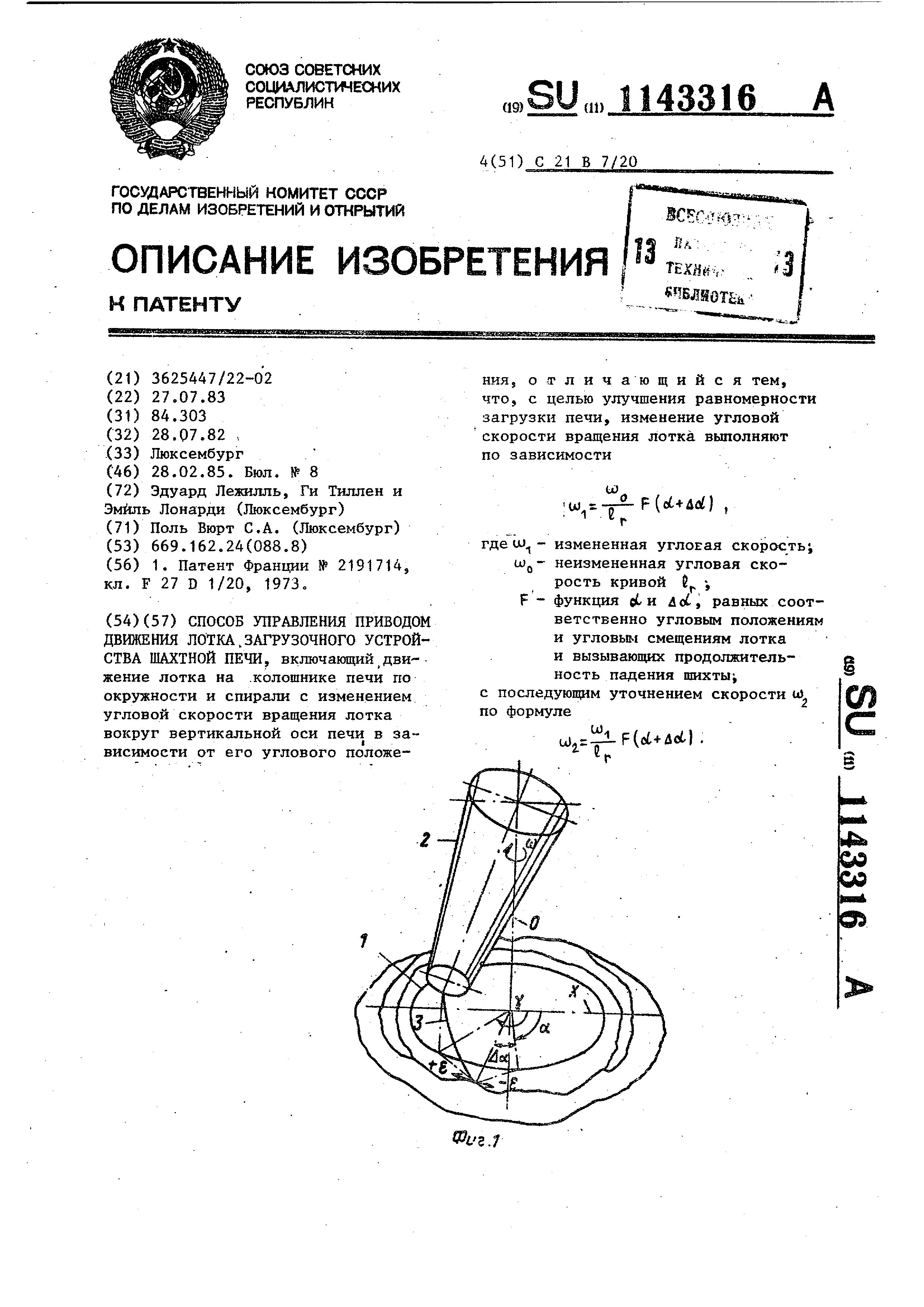
11 Изобретение касается способа управления движением качающегося желоба , который может поворачиваться вокруг двух ортогональных осей, приводимых для этого в действие с помощью двух приводных средств, независимых друг от друга, для перемещения конца желоба по концентрическим окружностям или по спирали вокруг вертикальной оси. Наиболее близким к изобретению по технической сущности и достигаемому результату является способ управления приводом лотка загрузочного устройства шахтной печи, включаюпщй дви жение лотка на колошнике печи по окружности и спирали с изменением угловой скорости вращения лотка вокруг вертикальной оси печи в зависимости от его углового положения l Однако при проведении испытаний и экспериментов на модели этого ти|па было установлено, что слои материала , укладываемого посредством лотка, неравномерны по толщине. Если рассматривать лишь один слой, то эти неравномерности не имели бы отри цательных последствий для загрузки печи. Однако неравномерности имеют место для каждого укладываемого слоя в одних и тех же местах, соответствующих точным угловым положениям желоба , так что наблюдается эффект накопления слой за слоем, который приводит в конечном счете к уровню заг грузки в виде седла. Этот недостаток имеет место более или менее явно во всех загрузочных устройствах с подвеской желоба типа карданной независимо от средства для привода и управления. Причина этого в том, что эти типы распределительного желоба подвергаются за время каждого вращения в диаметрально противоположных и четко определенных местах поворотам (хотя и слабым, но тем не менее ощутимым) вокруг сйоей продольной оси. Во время такого поворота трение в момент прохождения загрузки через желоб снижается, т.е скорость падения увеличивается. Загружаемый материал быстрее достигает точки падения, и толщина укладываемого слоя увеличивается в тех местах, где оказывается точка падения , соответствующая угловому положению желоба, в котором происходит поворот. Обратный эффект происходит в конце поворота желоба, когда трение внутри него нновь увсличипае-тся, что приводит к снижению толщишл осаждаемого слоя. Цель изобретения - улучшение равномерности загрузки печи. Для достижения этой цели согласно способу управления приводом движения лотка загрузочного устройства шахтной печи, включающему движение лотка на колошнике печи по окружности и спирали с изменением угловой скорости вращения лотка вокруг вертикальной оси печи в зависимости от .его углового положения, изменение угловой скорости лотка выполняют по зависимости , /-F() где ш - измененная угловая скорость Ыр- неизмененная угловая скорость кривой Е|, , F - функция ei и Ле(,, равных соответственно угловым положениям и угловь м смещениям лотка и вызывающих продолжительность падения шихты, с последующим уточнением скорости Ыл по формуле () . На фиг. 1 схематически показан распределительный лоток во время сброса кольцевого слоя на фиг. 2 наклон лотка по отношению к центральной ;оси на фиг. 3 - полярная диаграмма, изображающая толщину слоя материала, сбрасываемого с помощью качающегося лотка-, на фиг. 4 - полярная диаграмма угловой скорости; на фиг. 5 - блок-схема цепи управления движением лотка. На фиг. 1 и 2 показан распределительный качающийся лоток в определенном угловом положении, в котором он занимает наклон (см. фиг.2) по отношению к вертикальной оси О и угловое положение у(фиг. 1) по отношению к горизонтальной оси отсчета , например оси X. Предполагается, что жёлоб при наклоне приводится во вращательное движение в направлении часовой стрелки вокруг оси О с угловой скоростью (А для получения кольцевого слоя загружаемого материала на шихте, при этом связь и)т. 31Г На фнг. 1 об1Г:значает горизонталь ную проекцию круговой траектории ни него конца желоба 2. Загружаемый ма териал, сбрасываемы желобом, имеет след-траекторию падения 3 с вертикальной составляющей и угловую составляющую из-за UI , т.е. загружаемый материал не падает в ту точку, в которую целится желоб точно в тот момент, когда материал отрывается от желоба. Предполагая, что частица отрывае ся от желоба, когда он находится в угловом положении о, а желоб продо , свое вращательное движение со скоростью iV в направлении часовой стрелки, удар этой частицы прои ходит тогда, когда точка удара этой частицы находится где-то между двух положений dC и у , например в положении oi+ J т.е. существует угловое смещение между моментом выход частицы с желоба и моментом ее удар о слой шихты. Амплитуда углового смещения fici зависит не только от крупности материала} но и от скорос ти падения, т.е. в зависимости от скорости ее падения частица быстрее или медленнее достигает шихты и ее точка падения располагается до или позади положения Лоб. Именно это явление имеет место для всех качающихся распределитель ных желобов с карданной подвеской, подвергающихся при.каждом вращении двум поворотам вокруг их продольной оси и изменяющих в связи с этим тре ние между загружаемым материалом и стенкой желоба. Это изменение .трени ускоряет или замедляет падение частиц . Когда имеется ускорение, смещение /Jut снижается, например, до так что стремится вызвать увеличение толщины слоя в том месте, котоЙре оказывается смещенным на угол ЛеС- от углового положения желоба, где произошел этот поворот. Также, когда имеется замедление, смещение АоС становится Да + , что вызывает снижение толщины слоя материала. Это замедление происходит в конце фазы .поворота, и снижение толщины оказывается следом, смещенным на угол 4о(.+ от углового положения, в котором заканчивается поворот желоба. На фиг. 3 показана в полярных ко ординатах толщина кольцевого слоя материала, сбряс-ыпаемого ил шихту, причем эта толщина пропорциональна их расстоянию до исходного. Кривая if представляет собой среднюю оптимальную толщину, которую можно рассчитать, например, по емкости бункера для складирования и площади поверхности шихты. Так как эта толщина равномерна кривая, представляющая 5,,, , является обязательно кругом. Кривая, представленная , является действительной толщиной слоя, укладываемого качающимся желобом, приводимым во вращательное движение с постоянной угловой скоростью uip и вызывающим указанные неравномерности. Толщина для каждого углового положения ci изображена длиной вектора Р . Кривая f. , контур которой специально преувеличен, позволяет увидеть два положения с максимальной толщиной в точках Ер , находящихся в угловых положениях О и 180°, а также два положения с минимальной толщиной в точках Е, . , находящихся соответственно в угловых положениях 90° и 270. На фиг. 4 изображена полярная диаграмма, подобная диаграмме фиг. 3, но для угловых скоростей и) . Таким образом , Wjj- постоянная угловая скорость для действительного неравномерного слоя г фиг. 3. Кривая tOj.- кривая компенсированных скоростей, получаемая изменением кривой иОрПО формуле LO : U)e(oC) Угловая скорость для каждого угового положения представлена длиной ы . . Функция F определяется F(ct) ) толщине, измеряемой до компенсирования . Цель компенсирования заключается в том, чтобы явления вызьшаемые поворотом желоба, и явления, вызываемые изменением угловой скорости, компенсировались для олучения равномерно укладываемого слоя, Кривая . Pf. фиг. 3 соответствует кривой w фиг. 3, т.е. толщине, уклаываемого слоя, изменяя угловую скоость по указанной формуле. Естестенно , кривая BC смещена на угол AcL о отношению к кривой учитыания йремени падения. Действие этого компенсирования угловой скорости по фиг. 4 таково, что слой Е изменяется так, чтобы получить кривую Е , приближаняцуюся к идеальному кругу, т.е. быстрее перемещая желоб в угловых положениях, соответствующих увеличениям толщинь слоя по кривой В f. , и медленее в угловых положениях, соответствующих меньшим толщинам слоя кривой Б|, стремятся снизить эти неравномерности в толщине укладываемого слоя. Математическое объяснение компенсирования таково. Пусть Е (с) толщина слоя для ш постоянная величина и представляющая неравномерности , вызываемые поворотом. Пусть l (ot) толщина слоя для u)c- переменная величина без учета неравномернос тей, вызываемых поворотом. ,| Средняя теоретическая толщина, определяемая из двух предположений (otK(dL)| Т.е. компенсируемая толщина приближается к идeaJlьиoй равйомерной толщине 8 Если первое компенсирование с по мощью регулирования угловой скорост не позволяет еще получить желаемый .результат, возможно использоваГть ме тод последовательных приближений и ойуществить более тонкое компенситрование интегрированием по формуле ) и т.д. в случае необходимости. Определение u)/, (rig осуществляется экспериментально либо расчетами, так как параметры, используемые для этого определения, могут быть измерены или вычислены. Поскольку d- функция и /J , и крупности загружаемого материала, . компенсируемые угловые скорости й) Wj ... могут быть определены дл различных наклонов |i и для различных крупностей., Эти различные величины компенсируемой угловой скорости могут зАкры ваться в память микроэвм, которая может вычислять в каждый момент линейной интерполяцией точную величину компенсируемой угловой скорости желоба. На фиг. 5 изображена блок-схема способа осуществления цепи управления для компенсирования угловой скорости желоба. В микроэвм 4 поступает информация ,,касающаяся наклона р и типа загружаемого материала, для расчета компенсируемых угловых скоростей. Приводной двигатель 5 желоба действует согласно сигналам управления вариатора yrnoibtx скоростей 6, включающего , кроме прочего,встроенный компаратор . На фиг. 5 обозначена механическая часть передатчика импульсов 7, детектор угловой скорости 8 и детектор положения 9, причем оба детектора могут комбинироваться, поскольку UJ . . Детектор угловых скоростей 8 подает в каждый момент сигналы, соответствующие действительной скорости ы 1, и посылает их вариатору скорости 6. Также детектор положения.9 подает в каждый момент сигналы, соответст вующие угловому положению d распределительного лотка, и посыпает их в микроэвм. Микроэвм 4 вычисляет в каждый момент на основе полученной информации, т.е. о , Д и параметров, соответствующих типу загружаемого материала , компенсируемую угловую скорость Ыс по указанным формулам. Сигналы , соответствующие угловой скорости u)c, вычисленной микроэвм 4, наnpaBnktoTCH в вариатор угловой скорости 6. Встроенный в него компаратор сравнивает в каждый момент компенсируемую угловую скорость u)c с действительной угловой скоростью Wf, данные о которой он получает от детектора 8, и в зависимости от результата этого сравнения приводной двигатель 5 замедляется или ускоряется . Предложенный способ корректирования угловой скорости желоба подходит к приводному устройству с круговым движением лотка. Корректирующее устройство согласно способу работы подходит также для других приводных устройств качающегося лотка карданной подвескойj, например лотка, приводимого в движение парой гидравлических домкратов.
Реферат
СПОСОБ УПРАВЛЕНИЯ ПРИВОДОМ ДВИЖЕНИЯ ЛОТКА,ЗАГРУЗОЧНОГО УСТРОЙСТВА ШАХТНОЙ ПЕЧИ, включающий дви- жение лотка на .колошнике печи по окружности и спирали с изменением угловой скорости вращения лотка вокруг вертикальной оси печи в зависимости от его углового положения что заг ско по где с п по ЙЬ СА9 00 Ф , отличающийся тем, , с целью улучшения равномерности рузки печи, изменение угловой рости вращения лотка выполняют зависимости . u.(i+Aoi) , 1 к UJ - измененная углосая скорость; Шц- неизмененная угловая скорость кривой С , F - функция ot-и Aoi, равных соответственно угловым положениям и угловым смещениям лотка и вызывающих продолжительность падения шихты; оследующим уточнением скорости и) формуле FU.dot). г
Комментарии