Система для наматывания и/или разматывания подающих бобин - RU2585190C1
Код документа: RU2585190C1
Чертежи

Описание
УРОВЕНЬ ТЕХНИКИ
Изобретение относится к системе для наматывания и/или разматывания резинового листового материала для шин и промежуточной прокладки на подающие бобины или с них.
Известна система для наматывания или разматывания резинового листового материала для шин и промежуточной прокладки на подающие бобины и с них. В известной системе подающая бобина и бобина для прокладки вручную поднимаются и загружаются на станцию наматывания. После завершения разматывания или наматывания подающей бобины операторам необходимо заменить подающую бобину и бобину для прокладки на станции наматывания новой подающей бобиной и новой бобиной для прокладки, соответственно. Эти операции по замене прерывают процесс наматывания и, кроме того, являются опасными из-за веса и размера бобин и близости различных подвижных частей станции наматывания.
Целью настоящего изобретения является обеспечение системы для наматывания и/или разматывания резинового листового материала для шин и промежуточной прокладки на подающие бобины или с них, причем непрерывность наматывания и/или разматывания может быть увеличена.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В соответствии с первым аспектом изобретение обеспечивает систему для наматывания и/или разматывания резинового листового материала для шин и промежуточной прокладки на подающие бобины или с них, содержащую первую секцию управления бобиной, вторую секцию управления бобиной и секцию наматывания, расположенную между первой секцией управления бобиной и второй секцией управления бобиной, причем система обеспечена с первой станцией и второй станцией, причем каждая станция содержит первую группу несущих элементов для удерживания подающей бобины и вторую группу несущих элементов для удерживания бобины для прокладки, по существу, в тандеме относительно подающей бобины, причем первая станция и вторая станция размещаются в положении управления в первой секции управления бобиной и второй секции управления бобиной, соответственно, для управления загрузкой и/или разгрузкой подающих бобин и бобин для прокладки на станции или с них, и причем первая станция и вторая станция выполнены таким образом, чтобы сменно перемещаться из их соответствующих положений управления в секциях управления бобинами в положение наматывания в секции наматывания, и наоборот.
Посредством сменного перемещения первой станции и второй станции в секцию наматывания бобины из станции, которая находится в секции управления бобиной, могут быть уже разгружены, и новые бобины могут загружаться, при этом резиновый листовой материал наматывается или разматывается на или с подающей бобины в другой станции, которая одновременно находится в положении наматывания в секции наматывания. Таким образом, новая группа подающей бобины и бобины для прокладки может быть уже загружена на станцию, которая находится в секции управления бобиной, до входа этой станции в секцию наматывания. Таким образом, время на замену бобин для наматывания и/или разматывания может быть уменьшено, и в результате прерывание входа резинового листового материала может быть уменьшено. Более того, так как все операции управления выполняются в секциях управления бобинами, количество операций, которые подлежат выполнению в опасной окружающей среде секции наматывания, может быть уменьшено или даже сведено до нуля.
В варианте осуществления первая станция и вторая станция функционально соединены таким образом, чтобы перемещаться в зависимости друг от друга, причем вторая станция находится в положении управления в ее соответствующей секции управления бобиной, когда первая станция находится в положении наматывания в секции наматывания, и наоборот. Посредством перемещения первой станции и второй станции в зависимости друг от друга может быть достигнуто, что перемещение первой станции в положение наматывания заставляет вторую станцию перемещаться в ее соответствующее положение управления, и наоборот.
В варианте осуществления первая станция и вторая станция функционально соединены друг с другом таким образом, чтобы быть совместно подвижными. Посредством совместного перемещения первой станции и второй станции может быть автоматически достигнуто, что перемещение первой станции в положение наматывания заставляет вторую станцию перемещаться в ее соответствующее положение управления, и наоборот.
В варианте осуществления первая станция и вторая станция неподвижно прикреплены друг к другу. Неподвижное закрепление между первой станцией и второй станцией может обеспечивать то, что они могут перемещаться синхронно.
В варианте осуществления система содержит первую перегородку, которая располагается между первой станцией и второй станцией. Первая перегородка может предотвращать или детектировать проход оператора или объекта из первой станции во вторую станцию, и наоборот. Следовательно, первая перегородка может заслонять одну станцию от другой.
В варианте осуществления первая перегородка функционально соединена со станциями таким образом, чтобы быть подвижной в зависимости от станций, причем первая перегородка заслоняет первую станцию на стороне первой станции, обращенной ко второй секции управления бобиной, когда первая станция находится в положении наматывания в секции наматывания, и причем первая перегородка заслоняет вторую станцию на стороне второй станции, обращенной к первой секции управления бобиной, когда вторая станция находится в положении наматывания. Когда подающая бобина одной станции наматывается или разматывается в секции наматывания, оператор, заслоняемый посредством первой перегородки от опасных перемещений бобин в секции наматывания, может безопасно управлять загрузкой и разгрузкой бобин в соседней станции в соответствующей секции управления бобиной.
В варианте осуществления первая перегородка функционально соединена со станциями таким образом, чтобы быть совместно подвижной. Посредством совместного перемещения первой станции, второй станции и первой перегородки может быть автоматически достигнуто то, что перемещение первой станции в положение наматывания заставляет первую перегородку заслонять сторону первой станции, обращенную ко второй секции управления бобиной, и что перемещение второй станции в положение наматывания заставляет первую перегородку заслонять сторону второй станции, обращенную к первой секции управления бобиной.
В варианте осуществления первая перегородка неподвижно соединена с, по меньшей мере, одной из станций. Неподвижное закрепление между первой перегородкой и первой станцией и/или второй станцией может обеспечивать то, что они могут перемещаться синхронно.
В варианте осуществления система содержит вторую и/или дополнительные перегородки, которые, в комбинации с первой перегородкой, размещены таким образом, чтобы образовать щит вокруг секции наматывания и первой секции управления бобиной, когда первая станция находится в положении наматывания в секции наматывания, и которые, в комбинации с первой перегородкой, размещены таким образом, чтобы образовать экран вокруг секции наматывания и второй секции управления бобиной, когда вторая станция находится в положении наматывания в секции наматывания. Посредством образования щита вокруг секции наматывания и секции управления пустой бобиной, связанной со станцией, которая находится в положении наматывания в секции наматывания, перегородки могут эффективно заслонять другую секцию управления бобиной от других секций.
В варианте осуществления вторая и/или дополнительные перегородки являются сменно подвижными между первым положением, в котором они заслоняют первую секцию управления бобиной, и вторым положением, в котором они заслоняют вторую секцию управления бобиной. Посредством сменного перемещения перегородок количество перегородок, требуемых для эффективного экранирования указанных секций, может быть уменьшено.
В варианте осуществления одна или более перегородок, каждая, заданы границей группы, содержащей ограждение, стенку, область оптического детектирования или матрицу лучей света. Ограждение или стенка могут предотвращать физический проход объектов или оператора. Хотя область оптического детектирования или матрица лучей света не могут физически предотвращать такой проход, они могут детектировать такой проход и предпринимать соответствующее действие, например остановку системы 1. В случае задания перегородки областью оптического детектирования или матрицей лучей света указанная перегородка может легко и мгновенно активироваться или деактивироваться.
В варианте осуществления каждая станция содержит каретку, которая обеспечивает возможность перемещения станции между ее соответствующей секцией управления бобиной и секцией наматывания, причем, предпочтительно, первая группа несущих элементов и вторая группа несущих элементов проходят на противоположных сторонах каретки. Посредством несущих элементов, проходящих на обеих сторонах кареток, вес бобин может равномерно балансироваться относительно каретки.
В варианте осуществления система содержит направляющую, которая проходит через каждую из секций в направлении, в котором секции располагаются рядом друг с другом, причем каретки станций располагаются на направляющей. Направляющая может способствовать перемещению кареток между различными секциями.
В варианте осуществления первая группа несущих элементов и вторая группа несущих элементов являются подвижными относительно друг друга в осевом направлении бобин. Группы несущих элементов могут перемещаться в осевом направлении бобин для выравнивания группы несущих элементов для загрузки или разгрузки бобины. Более того, группы несущих элементов могут перемещаться в осевом направлении бобин для регулировки спаренного выравнивания бобин во время наматывания или разматывания, для корректировки неровностей материала, подлежащего наматыванию.
В варианте осуществления каждая группа несущих элементов содержит два кронштейна, которые предназначены для сцепления с осью бобины с обеих сторон бобины, причем для каждой группы несущих элементов кронштейны являются подвижными относительно друг друга в осевом направлении бобины. Благодаря наличию кронштейнов каждой группы несущих элементов, подвижных относительно друг друга, кронштейны могут перемещаться по направлению друг к другу для сцепления с бобиной. Кроме того, промежуточное расстояние между кронштейнами может варьироваться для приспосабливания различных размеров бобин.
В варианте осуществления кронштейны являются подвижными относительно друг друга поступательным образом в осевом направлении бобины. Поступательное перемещение может обеспечивать то, что кронштейны являются способными соосно сцепляться с бобиной.
В варианте осуществления система дополнительно содержит первый подъемный механизм в первой секции управления бобиной и второй подъемный механизм во второй секции управления бобиной, причем подъемные механизмы предназначены для поднятия или опускания подающих бобин и бобин для прокладок на и с их соответствующих станций. Подъемные механизмы могут уменьшать опасность для операторов, управляющих во время управления тяжелыми бобинами.
В соответствии со вторым аспектом изобретение обеспечивает способ для наматывания и/или разматывания резинового листового материала для шин и промежуточной прокладки на подающие бобины или с них, использующий систему, содержащую первую секцию управления бобиной, вторую секцию управления бобиной и секцию наматывания, расположенную между первой секцией управления бобиной и второй секцией управления бобиной, причем система обеспечена с первой станцией и второй станцией, причем каждая станция содержит первую группу несущих элементов для удерживания подающей бобины и вторую группу несущих элементов для удерживания бобины для прокладки, по существу, в тандеме относительно подающей бобины, причем способ содержит этапы размещения первой станции и второй станции в положении управления в первой секции управления бобиной и второй секции управления бобиной, соответственно, загрузки и/или разгрузки подающих бобин и бобин для прокладки на или со станций и сменного перемещения первой станции и второй станции из их соответствующих положений управления в секциях управления бобинами в положение наматывания в секции наматывания, и наоборот.
Снова, посредством сменного перемещения первой станции и второй станции в секцию наматывания бобины из станции, которая находится в секции управления бобиной, могут быть уже разгружены, и новые бобины могут загружаться, при этом резиновый листовой материал наматывается или разматывается на подающую бобину или с нее в другой станции, которая, одновременно, находится в положении наматывания в секции наматывания.
В варианте осуществления первая станция и вторая станция перемещаются в зависимости друг от друга, причем способ содержит этап перемещения второй станции в положение управления в ее соответствующей секции управления бобиной, когда первая станция находится в положении наматывания в секции наматывания, и наоборот. Посредством перемещения первой станции и второй станции в зависимости друг от друга может быть достигнуто, что перемещение первой станции в положение наматывания заставляет вторую станцию перемещаться в ее соответствующее положение управления, и наоборот.
В варианте осуществления первая станция и вторая станция совместно перемещаются. Посредством совместного перемещения первой станции и второй станции может быть автоматически достигнуто, что перемещение первой станции в положение наматывания заставляет вторую станцию перемещаться в ее соответствующее положение управления, и наоборот.
В варианте осуществления система содержит первую перегородку, которая располагается между первой станцией и второй станцией, причем способ содержит этапы перемещения первой перегородки в зависимости от станций, тем самым заслоняя первую станцию на стороне первой станции, обращенной ко второй секции управления бобиной, когда первая станция находится в положении наматывания в секции наматывания, и заслоняя вторую станцию на стороне второй станции, обращенной к первой секции управления бобиной, когда вторая станция находится в положении наматывания. Когда подающая бобина одной станции наматывается или разматывается в секции наматывания, оператор, заслоняемый посредством первой перегородки от опасных перемещений бобин в секции наматывания, может безопасно управлять загрузкой и разгрузкой бобин в соседней станции в соответствующей секции управления бобиной.
В варианте осуществления первая перегородка и станции совместно перемещаются. Посредством совместного перемещения первой станции, второй станции и первой перегородки может быть автоматически достигнуто то, что перемещение первой станции в положение наматывания заставляет первую перегородку заслонять сторону первой станции, обращенную ко второй секции управления бобиной, и что перемещение второй станции в положение наматывания заставляет первую перегородку заслонять сторону второй станции, обращенную к первой секции управления бобиной.
В варианте осуществления система содержит датчик, причем способ содержит этапы детектирования конца прокладки посредством датчика, когда прокладка наматывается на одну из бобин, управления вращением бобины, на которую наматывается прокладка, исходя из определенного конца прокладки, таким образом, что после управляемого вращения определенный конец прокладки располагается в заданном положении на бобине. Таким образом, заданное положение конца прокладки на бобине может легко определяться оператором.
В соответствии с третьим аспектом изобретение обеспечивает способ для наматывания и/или разматывания резинового листового материала для шин и промежуточной прокладки на подающие бобины или с них, использующий систему, содержащую секцию управления бобиной с подающей бобиной и бобиной для прокладки, причем способ содержит этапы детектирования конца прокладки посредством датчика, когда прокладка наматывается на одну из бобин, управления вращением бобины, на которую наматывается прокладка, исходя из определенного конца прокладки, таким образом, что после управляемого вращения определенный конец прокладки располагается в заданном положении на бобине. Таким образом, заданное положение конца прокладки на бобине может легко определяться оператором.
Различные аспекты и признаки, описанные и показанные в описании изобретения, могут применяться по отдельности, где это возможно. Эти индивидуальные аспекты, в частности аспекты и признаки, описанные в прилагаемых зависимых пунктах формулы изобретения, могут задавать предмет выделенных заявок на патент.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение будет объясняться на основании иллюстративного варианта осуществления, показанного на прилагаемых схематичных чертежах, на которых:
на фиг. 1 показана система для наматывания и разматывания подающих бобин в соответствии с первым вариантом осуществления изобретения, в первом положении; и
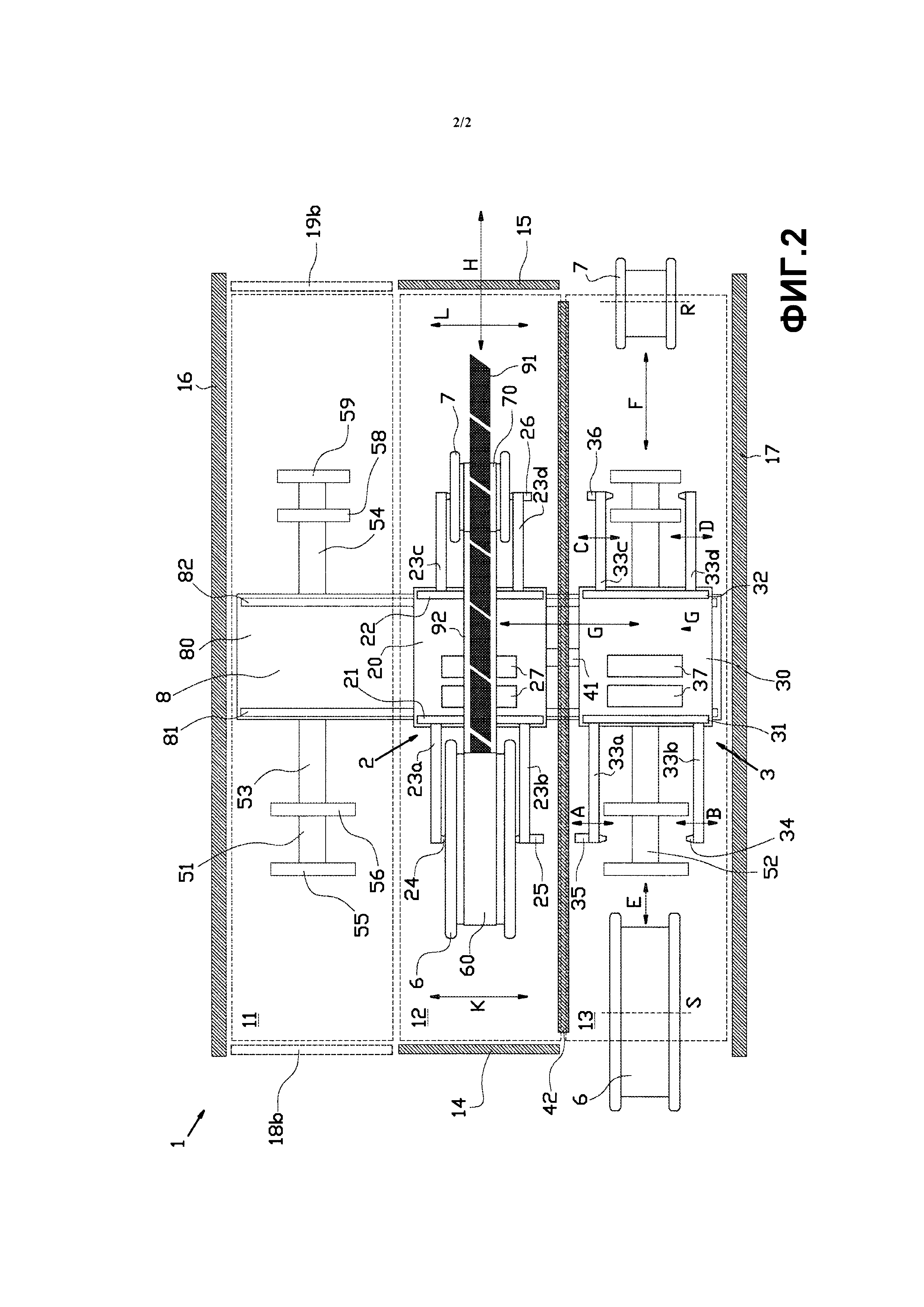
на фиг. 2 показана система в соответствии с фиг. 1 во втором положении.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На фиг. 1 и 2 показана система 1 для наматывания и/или разматывания прорезиненных листов или резинового листового материала 91 для шин и промежуточной прокладки 92 на подающие бобины 6 или с них в соответствии с иллюстративным вариантом осуществления изобретения.
В этом примере резиновый листовой материал 91 содержит множество отрезанных резиновых полос с металлическим армирующим кордом. Такие полосы обычно известны как брекеры, которые образуют слой каркаса сырой шины. Прокладка 92 содержит непрерывный слой нелипкого материала.
В режиме наматывания системы 1 прокладка 92 подается из рулона 70 прокладки 92 на полной бобине 7 для прокладки и объединяется с резиновым листовым материалом 91 до наматывания на изначально пустую подающую бобину 6 для образования рулона 60. Резиновый листовой материал 91 накладывается на промежуточную прокладку 92 таким образом, что когда резиновый листовой материал 91 наматывается в виде рулона 60 на подающую бобину 6, резиновый листовой материал 91 каждого оборота рулона 60 вокруг подающей бобины 6 отделяется посредством промежуточной прокладки 92 от предыдущего и/или последующего оборота резинового листового материала 91. Таким образом, посредством промежуточной прокладки 92 прилипание друг к другу множества оборотов резинового листового материала 91 в рулоне 60 может быть предотвращено.
В режиме разматывания системы 1 прокладка 92 и резиновый листовой материал 91 возвращаются обратно на изначально пустую бобину 7 для прокладки с полной подающей бобины 6, и резиновый листовой материал 91 отделяется от прокладки 92.
Как только наматывание или разматывание для определенной подающей бобины 6 и определенной бобины 7 для прокладки завершено, они подлежат быстрой замене на или смене новой подающей бобиной 6 и новой бобиной 7 для прокладки для обеспечения непрерывности производственного процесса шин.
С этой целью система 1 в соответствии с изобретением содержит первую станцию 2 и вторую станцию 3, которые размещены таким образом, чтобы быть сменно подвижными в направлении G смены между положением управления бобиной для управления загрузкой и разгрузкой подающих бобин 6 и бобин 7 для прокладки и положением наматывания для наматывания или разматывания подающих бобин 6 и бобин 7 для прокладки образом, который будет описываться более подробно в дальнейшем.
Как схематично показано на фиг. 1 и 2, система 1 может быть разделена на первую секцию 11 управления бобиной, секцию 12 наматывания и вторую секцию 13 управления бобиной. Секция 12 наматывания размещена между первой секцией 11 управления бобиной и второй секцией 13 управления бобиной. Секции 11-13 расположены рядом друг с другом в направлении G смены. В этом примере секции 11-13 имеют вытянутую прямоугольную форму и примыкают друг к другу вдоль их продольных сторон. Система 1 обеспечена с основной направляющей 8, которая проходит через каждую из секций 11-13 в направлении G смены. Основная направляющая 8 содержит основание 80, например заводской пол или возвышенность на заводском полу. На основании 80 основная направляющая 8 обеспечена с группой основных рельсов 81, 82, которые способствуют перемещению станций 2, 3 между различными секциями 11-13 в направлении G смены. Как показано на фиг. 1 и 2, каждая из станций 2, 3 отводится или размещается в их собственной секции 11, 13 управления бобиной, когда другая станция 2, 3 находится в положении наматывания в секции 12 наматывания.
Как показано на фиг. 1 и 2, каждая станция 2, 3 обеспечена с кареткой 20, 30, которая размещена на основных рельсах 81, 82 основной направляющей 8 таким образом, чтобы быть подвижной по основной направляющей 8 в направлении G смены. Станции 2, 3 размещаются и перемещаются относительно друг друга таким образом, что первая станция и вторая станция 2, 3 сменно перемещаются из положения управления в их соответствующих секциях 11, 13 управления бобинами в положение наматывания в секции 12 наматывания. Более конкретно, перемещение кареток 2, 3 между положениями, как показано на фиг. 1 и 2, достигается, причем на фиг. 1 показана ситуация, в которой вторая станция 3 находится в положении наматывания в секции 12 наматывания, а первая станция 2 находится в положении управления в первой секции 11 управления бобиной, и причем на фиг.2 показана ситуация, в которой первая станция 2 находится в положении наматывания в секции 12 наматывания, а вторая станция 3 находится в положении управления во второй секции 13 управления бобиной. Когда первая станция 2 и вторая станция 3 находятся в секции 12 наматывания, их соответствующие секции 11, 13 управления бобинами являются неактивными в том смысле, что не выполняются операции управления.
В этом иллюстративном варианте осуществления каретки 20, 30 станций 2, 3 взаимно соединены или прикреплены друг к другу посредством соединения 41 таким образом, что станции 2, 3 являются способными совместно перемещаться или перемещаться синхронно. Так как перемещение одной из станций вызывает перемещение другой, только один привод (не показан) требуется для автоматического достижения вышеупомянутого зависимого перемещения. В альтернативном варианте осуществления станции 2, 3 перемещаются индивидуально посредством отдельных приводов. Однако, в таком альтернативном варианте осуществления приводы управляются в зависимости друг от друга для достижения вышеупомянутого зависимого перемещения станций 2, 3.
Каждая каретка 20, 30 обеспечена с первым кронштейном 23а, 33а и вторым кронштейном 23b, 33b, которые образуют первую группу несущих элементов, и третьим кронштейном 23с, 33с и четвертым кронштейном 23d, 33d, которые образуют вторую группу несущих элементов. Первая группа несущих элементов и вторая группа несущих элементов проходят от противоположных сторон каретки 20, 30 с первым кронштейном 23а, 33а и вторым кронштейном 23b, 33b, удерживающими подающую бобину 6 на одной стороне каретки 20, 30, и с третьим кронштейном 23с, 33с и четвертым кронштейном 23d, 33d, удерживающими бобину 7 для прокладки на противоположной стороне каретки 20, 30, соответственно. В этом примере несущие элементы проходят в направлении, поперечном относительно направления G смены. В результате, первая группа несущих элементов и вторая группа несущих элементов также проходят на противоположных сторонах основной направляющей 8.
Кронштейны 23a-d, 33a-d обеспечены с зажимами 24, 34 на их соответствующих дистальных концах, причем зажимы 24, 34 размещены для сцепления подающей бобины 6 и бобины 7 для прокладки на их соответствующих осях S, R. Подающая бобина 6 и бобина 7 для прокладки являются вращаемыми относительно кронштейнов 23a-d, 33a-d вокруг их соответствующих осей S, R. Для каждой группы несущих элементов один из кронштейнов, в этом случае второй кронштейн 23b, 33b и четвертый кронштейн 23d, 33d, обеспечены с приводами 25, 26 бобин для приведения в действие и/или торможения вращения соответствующей сцепленной бобины.
Кронштейны 23a, 23b, 33a, 33b первой группы несущих элементов индивидуально соединяются с первой регулировочной направляющей в виде первого регулировочного рельса 21, 31 на одной стороне катерки 20, 30. Кронштейны 23c, 23d, 33c, 33d второй группы несущих элементов индивидуально соединяются со второй регулировочной направляющей в виде второго регулировочного рельса 22, 32 на противоположной стороне катерки 20, 30 относительно первой группы несущих элементов. Первые кронштейны 23а, 33а, вторые кронштейны 23b, 33b, третьи кронштейны 23с, 33с и четвертые кронштейны 23d, 33d являются индивидуально перемещаемыми относительно друг друга вдоль соответствующих регулировочных рельсов 21, 22, 31, 32 поступательным образом в первом направлении А сцепления, втором направлении В сцепления, третьем направлении С сцепления и четвертом направлении D сцепления, соответственно. Перемещение кронштейнов 23a-d, 33a-d обеспечивает возможность сцепления или расцепления зажимов 24 от бобин 6, 7 в различных положениях вдоль основной направляющей 8. Таким образом, не требуется точно центрировать бобины 6, 7 между кронштейнами 23a-d, так как кронштейны 23a-d являются способными перемещаться относительно положения бобины 6, 7. Дополнительно, для каждой группы несущих элементов расстояние между двумя соответствующими кронштейнами 23a-d, 33a-d указанной группы несущих элементов может увеличиваться или уменьшаться для того, чтобы приспосабливать различные размеры бобин 6, 7.
Первые кронштейны 23а, 33а и вторые кронштейны 23b, 33b, однако, также могут управляться таким образом, чтобы совместно перемещаться в первом направлении К выравнивания вдоль первого регулировочного рельса 21, 31. Аналогичным образом, третьи кронштейны 23с, 33с и четвертые кронштейны 23d, 33d могут управляться таким образом, чтобы совместно перемещаться во втором направлении L выравнивания вдоль второго регулировочного рельса 22, 32. Это обеспечивает возможность перемещения первой группы несущих элементов и второй группы несущих элементов и, таким образом, бобин 6, 7, подлежащих удерживанию между указанными несущими элементами, подлежащими перемещению относительно друг друга. Как показано на фиг. 1 и 2, подающая бобина 6 и бобина 7 для прокладки удерживаются, по существу, в последовательном или спаренном выравнивании относительно друг друга таким образом, что подающая бобина 6 и бобина 7 для прокладки могут соединяться друг с другом, по существу, в одной и той же плоскости для наматывания или разматывания во взаимодействии резинового листового материала 91 и прокладки 92 на или с подающей бобины 6. Однако могут требоваться небольшие регулировки спаренного выравнивания в первом направлении К выравнивания или втором направлении L выравнивания для компенсации неровностей наматывания прокладки 92 и/или резинового листового материала 91 на прокладке 92.
Как показано на фиг. 1 и 2, первая секция 11 управления бобиной и вторая секция 13 управления бобиной обеспечены с первым подъемным механизмом 51 и вторым подъемным механизмом 52, соответственно. Каждый из подъемных механизмов 51, 52 содержит первую подъемную балку 53 и вторую подъемную балку 54, проходящие на противоположных сторонах основной направляющей 8, параллельно относительно группы несущих элементов станций 2, 3. Первая подъемная балка 53 обеспечена с двумя поперечными поддерживающими штангами 55, 56, которые расположены на расстоянии друг от друга для поддерживания между поддерживающими штангами 55, 56 подающей бобины 6 вдоль части ее окружности. Вторая подъемная балка 54 обеспечена с двумя поперечными поддерживающими штангами 58, 59, которые расположены на расстоянии друг от друга для поддерживания между поддерживающими штангами 58, 59 бобины 7 для прокладки вдоль части ее окружности.
В соединении 41 между станциями 2, 3 система 1 обеспечена с первой перегородкой 42. Первая перегородка 42, предпочтительно, проходит между станциями 2, 3 вдоль, по существу, всей длины секций 11-13, в продольном направлении секций 11-13. Первая перегородка 42 либо неподвижно соединена с соединением 41 для совместного перемещения или синхронного перемещения со станциями 2, 3, либо обеспечена с ее собственным приводом, который управляется образом, в котором станции 2, 3 и первая перегородка перемещаются в зависимости друг от друга. В этом примере первая перегородка 42 содержит ограждение или стенку, которая задает физическую границу между первой станцией 2 и второй станцией 3. Когда вторая станция 3 находится в положении наматывания в секции 12 наматывания, как показано на фиг. 1, первая перегородка 42 заслоняет вторую станцию 3 на стороне второй станции 3, обращенной к первой секции 11 управления бобиной. Когда первая станция 2 находится в положении наматывания в секции 12 наматывания, как показано на фиг. 2, первая перегородка 42 заслоняет первую станцию 2 на стороне первой станции 2, обращенной ко второй секции 13 управления бобиной. Таким образом, оператор, заслоняемый посредством первой перегородки 42 от опасных перемещений бобин 6, 7 в секции 12 наматывания, может безопасно управлять загрузкой и разгрузкой бобин 6, 7 в соседней секции 11, 13 управления бобиной.
Система 1 дополнительно содержит вторую перегородку 14 и третью перегородку 15, которые стратегически расположены на поперечных сторонах секции 12 наматывания. Вторая перегородка 14 и третья перегородка 15 содержат стенку или ограждение, которые, в комбинации со стенкой или ограждением первой перегородки 42, образуют физический щит вокруг трех сторон секции 12 наматывания. Система 1 также обеспечена с четвертой перегородкой 16 и пятой перегородкой 16, которые расположены вдоль внешних продольных сторон первой секции 11 управления бобиной и второй секции 13 управления бобиной, соответственно. В заключение, оставшиеся поперечные стороны первой секции 11 управления бобиной и второй секции 13 управления бобиной обеспечены с шестой перегородкой 18а, 18b и седьмой перегородкой 19а, 19b, содержащими область оптического детектирования или матрицу лучей света. Шестая перегородка 18а, 18b и седьмая перегородка 19а, 19b могут просто и мгновенно выборочно активироваться или деактивироваться для каждой из секций 11, 13 управления бобинами для обеспечения прохода операторов и объектов между секциями 11, 13 управления бобинами и окружающей средой снаружи системы 1.
Вместе перегородки 14-17, 18a, 18b, 19a, 19b, 42 образуют экран вокруг секции 12 наматывания и неактивной секции 11, 13 управления бобиной, шестая перегородка 18а, 18b и седьмая перегородка 19а, 19b на активной секции 11, 13 управления бобиной деактивируются. Таким образом, одна из станций 2, 3, которая находится в ее положении управления в ее соответствующей секции 11, 13 управления бобиной, является доступной, при этом операторы, управляющие загрузкой и разгрузкой бобин 6, 7 указанной одной станции 2, 3 в указанной активной секции 11, 13 управления бобиной, полностью заслоняются от других секций.
Для специалистов в данной области будет очевидным, что варианты типов границ, которые образуют каждую перегородку 14-17, 18a, 18b, 19a, 19b, 42, подпадают под объем изобретения. Каждая из перегородок 14-16, 18a, 18b, 19a, 19b, 42 может содержать границу, заданную стенкой, областью оптического детектирования или матрицей лучей света или другими средствами детектирования и/или предотвращения прохода. Ограждение и стенка могут предотвращать проход оператора или объектов из одной станции или секции в другую. Хотя область оптического детектирования или матрица лучей света не могут физически предотвращать проход, они могут детектировать такой проход и предпринимать соответствующее действие, например остановку системы 1, в случае неразрешенного прохода.
Способ наматывания и разматывания резинового листового материала 91 для шин и промежуточной прокладки 92 на или с подающих бобин 6 будет объясняться ниже на основании фиг. 1 и 2. Так как обе станции 2, 3 повторяют цикл, по существу, одних и тех же этапов во время способа, только этапы касательно первой станции 2 будут описываться подробно, а этапы касательно второй станции 3 будут кратко рассматриваться.
На фиг. 1 показана ситуация, в которой первая станция 2 находится в положении управления в первой секции 11 управления бобиной. Если система 1 находится в режиме наматывания, полная подающая бобина 6 с рулоном 60 резинового листового материала 91 и прокладки 92 и пустая бобина 7 для прокладки разгружаются с и опускаются с первой станции 2 посредством первого подъемного механизма 51 в направлениях E, F загрузки/разгрузки, и новая пустая подающая бобина 6 и полная бобина 7 для прокладки с рулоном 70 прокладки 92 поднимаются на и загружаются на первую станцию 2 посредством первого подъемного механизма 51 в направлениях E, F загрузки/разгрузки. Если система 1 находится в режиме разматывания, пустая подающая бобина 6 и полная бобина 7 для прокладки с рулоном 70 прокладки 92 разгружаются и опускаются с первой станции 2 посредством первого подъемного механизма 51 в направлениях E, F загрузки/разгрузки, и новая полная подающая бобина 6 с рулоном 60 резинового листового материала 91 и прокладки 92 и пустая бобина 7 для прокладки поднимаются на и загружаются на первую станцию 2 посредством первого подъемного механизма 51 в направлениях E, F загрузки/разгрузки.
Когда зажимы 24 кронштейнов 23a-d сцепились с заново загруженными бобинами 6, 7, первый подъемный механизм 51 может опускаться таким образом, что бобины 6, 7 свободно подвешиваются на кронштейнах 23а-d. Затем, прокладка 92 с полной бобины 6, 7 частично разматывается таким образом, что ее свободный конец может соединяться с окружностью пустой бобины 6, 7. Первая станция 2 теперь готова к перемещению в направлении G смены в секцию 12 наматывания, непосредственно после завершения наматывания бобин 6, 7 второй станции 3 в секции 12 наматывания.
На фиг. 2 показана ситуация, в которой первая станция 2 переместилась из ее положения управления в первой секции 11 управления бобиной в положение наматывания в секции 12 наматывания. В этом положении привод 25, 26 пустой бобины 6, 7 может приводиться в действие для принятия присоединенной прокладки 92 с полной бобины 6, 7. Когда прокладка 92 перенесена с полной бобины 6, 7 на пустую бобину 6, 7, привод 25, 26 полной бобины 6, 7 приводится в действие для поддержания натяжения в прокладке 92 и для предотвращения провисания прокладки 92. В режиме наматывания системы 1 резиновый листовой материал 91 накладывается на прокладку 92 до наматывания прокладки 92 вокруг подающей бобины 6. В режиме разматывания системы 1 резиновый листовой материал 91 отделяется от прокладки 92 до наматывания прокладки 92 на бобину 7 для прокладки. Резиновый листовой материал 91 подается или извлекается посредством конвейера (не показан) вдоль направления Н входа/выхода резинового листового материала.
Как только наматывание бобин 6, 7 первой станции 2 было завершено, первая станция 2 может перемещаться обратно снова в ее положение управления в первой секции 11 управления бобиной для разгрузки бобин 6, 7 и замены их новыми бобинами 6, 7, после чего вышеупомянутые этапы могут повторяться.
Во время вышеупомянутых этапов вторая станция 3 сменялась первой станцией 2 посредством перемещения в положение наматывания, при этом первая станция 2 была в положении управления, и наоборот. Во время загрузки и разгрузки бобин 6, 7 первой станции 2 бобины 6, 7 второй станции 3 взаимодействовали для наматывания или разматывания подающей бобины 6 в зависимости от режима системы 1. Когда первая станция 2 переместилась в положение наматывания, это заставило вторую станцию 3 перемещаться из положения наматывания в ее положение управления во второй секции 13 управления бобиной. Одновременно с тем, когда бобины 6, 7 первой станции 1 наматывались в секции 12 наматывания, подающая бобина 6 и бобина 7 для прокладки второй станции 3 разгружались и заменялись или взаимозаменялись новыми бобинами 6, 7 аналогичным образом, как описано раньше относительно разгрузки и загрузки бобин 6, 7 первой станции 2.
Посредством сменного перемещения первой станции 2 и второй станции 3 в секцию 12 наматывания новая подающая бобина 6 и бобина 7 для прокладки могут быть уже загружены на станцию 2, 3, которая находится в секции 11, 13 управления бобиной, до входа этой станции 2, 3 в секцию 12 наматывания. Таким образом, время на замену бобин 6, 7 для наматывания и/или разматывания может быть уменьшено, и в результате прерывание входа или выхода Н резинового листового материала 91 может быть уменьшено.
В варианте осуществления система 1 содержит датчик (не показан), причем способ содержит этап детектирования конца прокладки 92 посредством датчика, когда прокладка 92 наматывается на одну из бобин 6, 7. После определения конца прокладки 92 привод 25, 26 бобины 6, 7, на которую наматывается прокладка 92, управляется таким образом, что дополнительное вращение бобины 6, 7 за точку детектирования конца прокладки 92 является известным. Посредством управления указанным дополнительным вращением и посредством остановки вращения, как только конец прокладки 92 прошел заданное расстояние от точки детектирования, конечное положение конца прокладки 92 на бобине 6, 7 может точно управляться. В результате, заданное положение конца прокладки 92 на бобине 6, 7 может легко определяться оператором.
Следует понимать, что вышеприведенное описание включено для иллюстрации работы предпочтительных вариантов осуществления, и не подразумевается ограничивать объем изобретения. Из вышеприведенного рассмотрения многочисленные изменения будут очевидными для специалиста в данной области, которые, тем не менее, будут подпадать под идею и объем настоящего изобретения.
Реферат
Изобретение относится к системе для наматывания и/или разматывания резинового листового материала для шин и промежуточной прокладки на подающие бобины или с них. Система содержит первую секцию управления бобиной, вторую секцию управления бобиной и секцию наматывания, расположенную между первой секцией управления бобиной и второй секцией управления бобиной. Система обеспечена с первой станцией и второй станцией. Первая станция и вторая станция размещаются в положении управления в первой секции управления бобиной и второй секции управления бобиной соответственно, для управления загрузкой и/или разгрузкой подающих бобин и бобин для прокладки на или со станций. Первая станция и вторая станция выполнены таким образом, чтобы сменно перемещаться из их соответствующих положений управления в секциях управления бобинами в положение наматывания в секции наматывания, и наоборот. Изобретение обеспечивает повышение производительности процесса. 2 н. и 21 з.п. ф-лы, 2 ил.
Комментарии