Спортивный тренажер с комбинированным движением - RU2700962C1
Код документа: RU2700962C1
Чертежи













Описание
Изобретение относится к спортивному тренажеру с комбинированным движением, в частности, к спортивному тренажеру с пультом управления для настройки конфигурации соединительных узлов тренажера с целью выбора траектории движения педалей без использования ручной настройки, обеспечивая тем самым пользователю возможность выбора множества режимов движения, включая режим эллиптического движения, режим степпера и режим велосипеда.
Уровень техники
Для тренировки мышц тела внутри помещения могут использоваться различные спортивные тренажеры, позволяя человеку заниматься физподготовкой дома или в спортзале для улучшения своей физической формы или восстановления после травмы. Обычно потребителями для занятий внутри помещения выбираются такие тренажеры как беговые дорожки, тренажеры «лестница», гребные тренажеры, велотренажеры и т.д. В связи с развитием новых технологий повышенным спросом у потребителей пользуются спортивные тренажеры со специальной траекторией движения. Но хотя такие тренажеры и создают тренировочный эффект, они обеспечивают только один режим движения. Эти тренажеры не могут обеспечивать более одного режима движения. Не существует какого-либо одного тренажера, который мог бы обеспечивать и режим эллиптического движения, и режим степпера, и режим велосипеда. Кроме того, известные тренажеры требуют, чтобы пользователь следовал их траекториям движения. Если траектория движения тренажера спроектирована неправильно, то во время занятий на нем пользователь может почувствовать боль в мышцах ног. При использовании неправильно спроектированного тренажера в течение определенного периода времени возможно получение травмы.
Раскрытие изобретения
Одна из целей настоящего изобретения заключается в создании спортивного тренажера с комбинированным движением, который обеспечивает возможность выполнения множества движений или тренировочных режимов. С помощью пульта управления пользователь может изменять конфигурацию соединительных механизмов устройства, заставляя педали тренажера перемещаться по требуемой траектории без использования ручной настройки. Кроме того, пульт управления содержит множество кнопок точной настройки, с помощью которых можно производить дополнительную регулировку траектории и сопротивления. Траектория, по которой перемещаются педали, является эргономичной, так что пользователь может быть защищен от получения травмы.
В частности, спортивный тренажер содержит опорную раму, блок передачи, кривошипный узел, пару соединенных с кривошипами шатунов, пару соединительных механизмов и пульт управления. Опорная рама выполнена с возможностью установки спортивного тренажера надлежащим образом на полу. Блок передачи содержит первое колесо, установленное на опорной раме; а кривошипный узел содержит центральную ось, закрепленную в центре первого колеса и проходящую через опорную раму, так что первое колесо имеет возможность вращения на опорной раме. Соединительные механизмы расположены с соответствующих двух сторон от вертикальной оси, проходящей вдоль передней вертикальной стойки опорной рамы и с соответствующих двух сторон от вертикальной оси, проходящей через соответствующий шарнир, неподвижно установленный на средней поперечной балке опорной рамы. Каждый из соединительных механизмов содержит несколько звеньев и педаль, способную под действием пользователя перемещаться по замкнутой траектории. Пульт управления выполнен с возможностью изменения по команде пользователя конфигурации соединительных механизмов, так что спортивный тренажер позволяет получить множество режимов движения для выбора пользователем.
При использовании такого спортивного тренажера можно производить настройку шатунов и полого регулировочного звена с целью изменения режима движения, осуществляемого устройством, и сопротивления (нагрузки), обеспечиваемой данным режимом, так что каждая педаль может перемещаться по замкнутой траектории, которая является эргономичной, так что пользователь может быть защищен от получения травмы.
Другие особенности и преимущества настоящего изобретения станут более понятными из дальнейшего описания со ссылками на чертежи.
Краткое описание чертежей
На фиг. 1 показан спортивный тренажер согласно одному из вариантов осуществления изобретения, вид в перспективе;
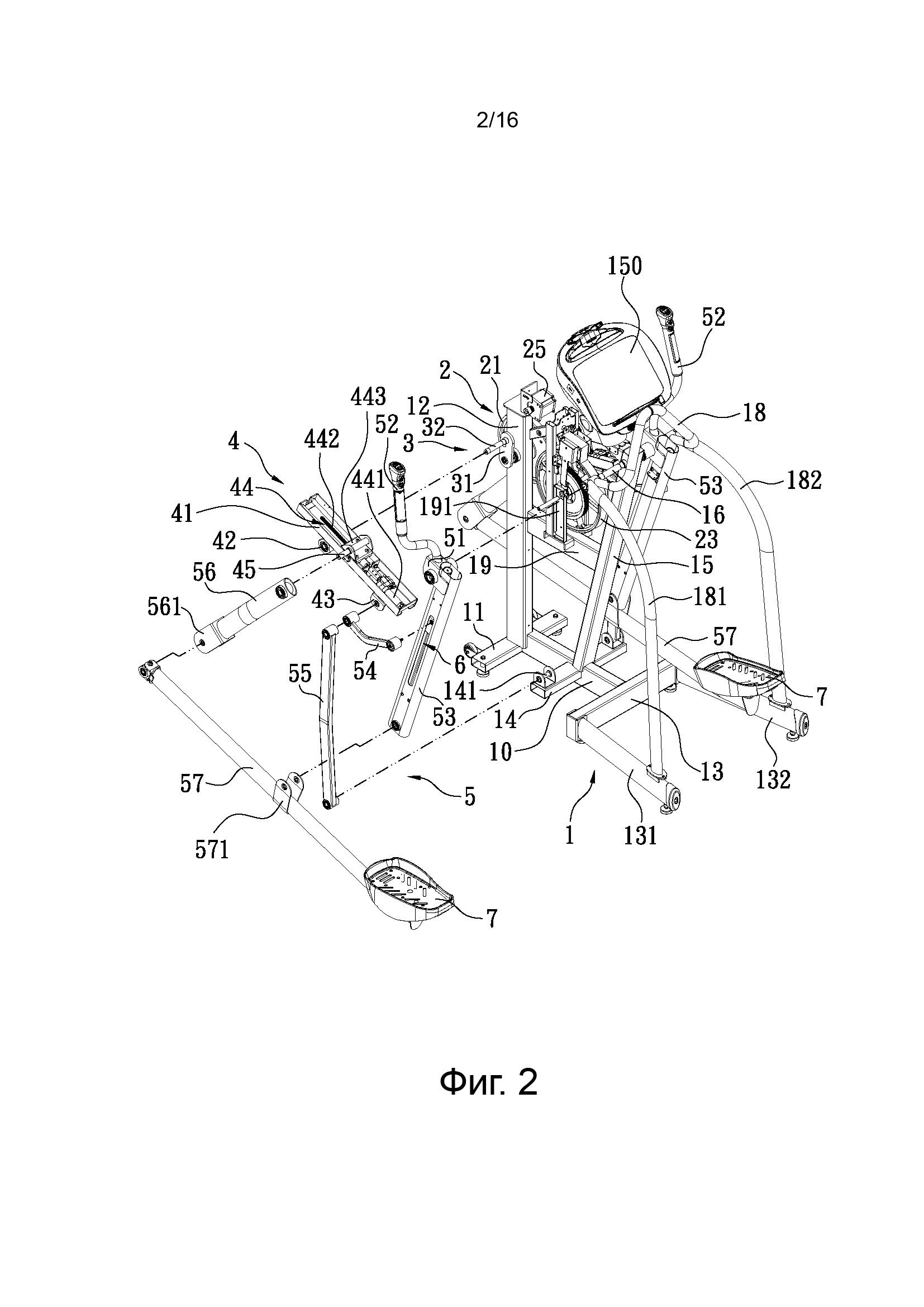
на фиг. 2 – спортивный тренажер в частичное разобранном виде;
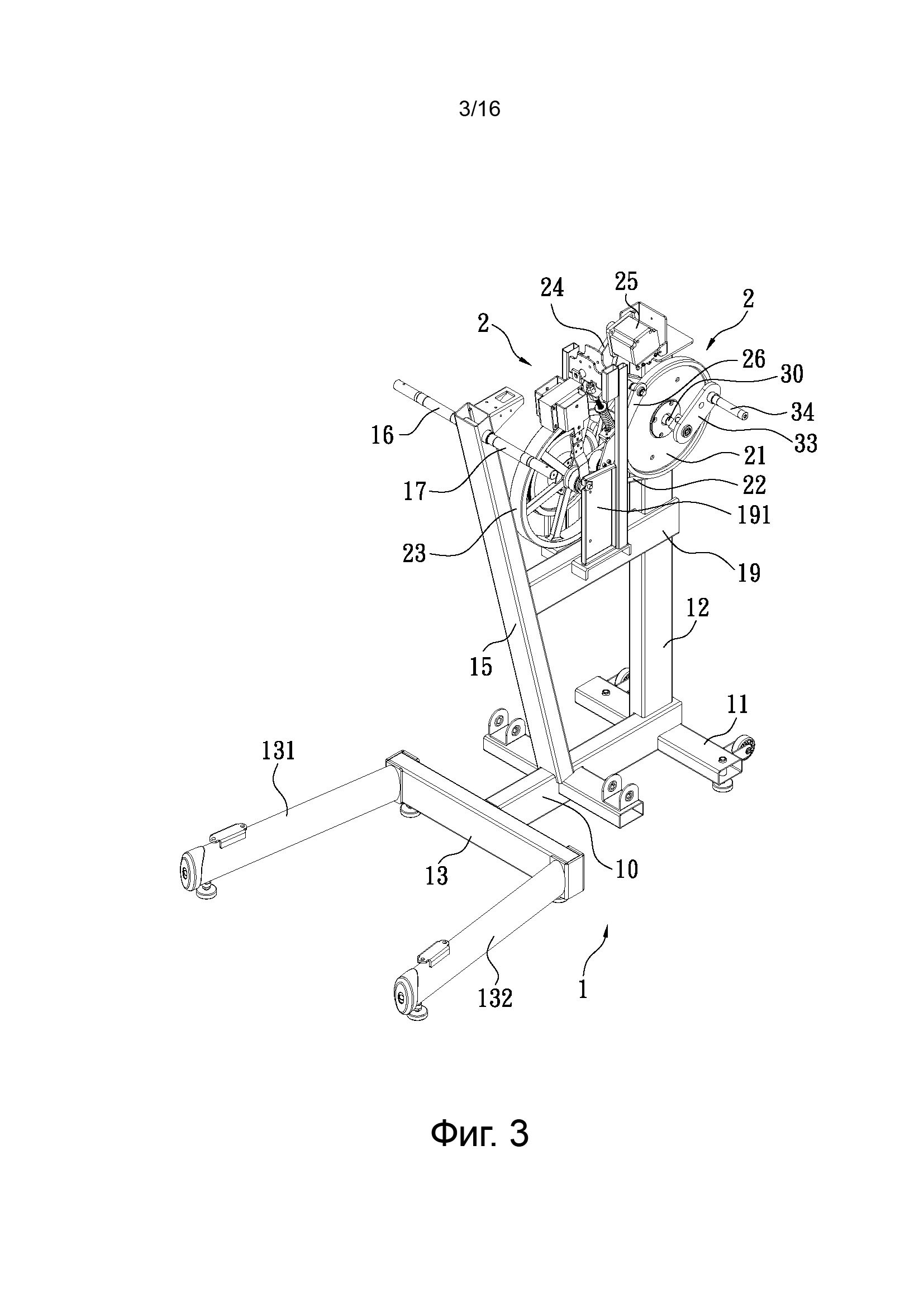
на фиг. 3 – опорная рама спортивного тренажера с установленным на ней блоком передачи, вид в перспективе;
на фиг. 4 – блок передачи, установленный на опорной раме, вид сбоку в увеличенном масштабе;
на фиг. 5 – соединенный с кривошипом шатун, включающий в себя блок перемещения, вид в плане;
на фиг. 6 – полое регулировочное звено, включающее в себя подъемно-опускающий блок, вид в плане;
на фиг. 7 – пульт управления спортивным тренажером;
на фиг. 8 – спортивный тренажер, вид сбоку;
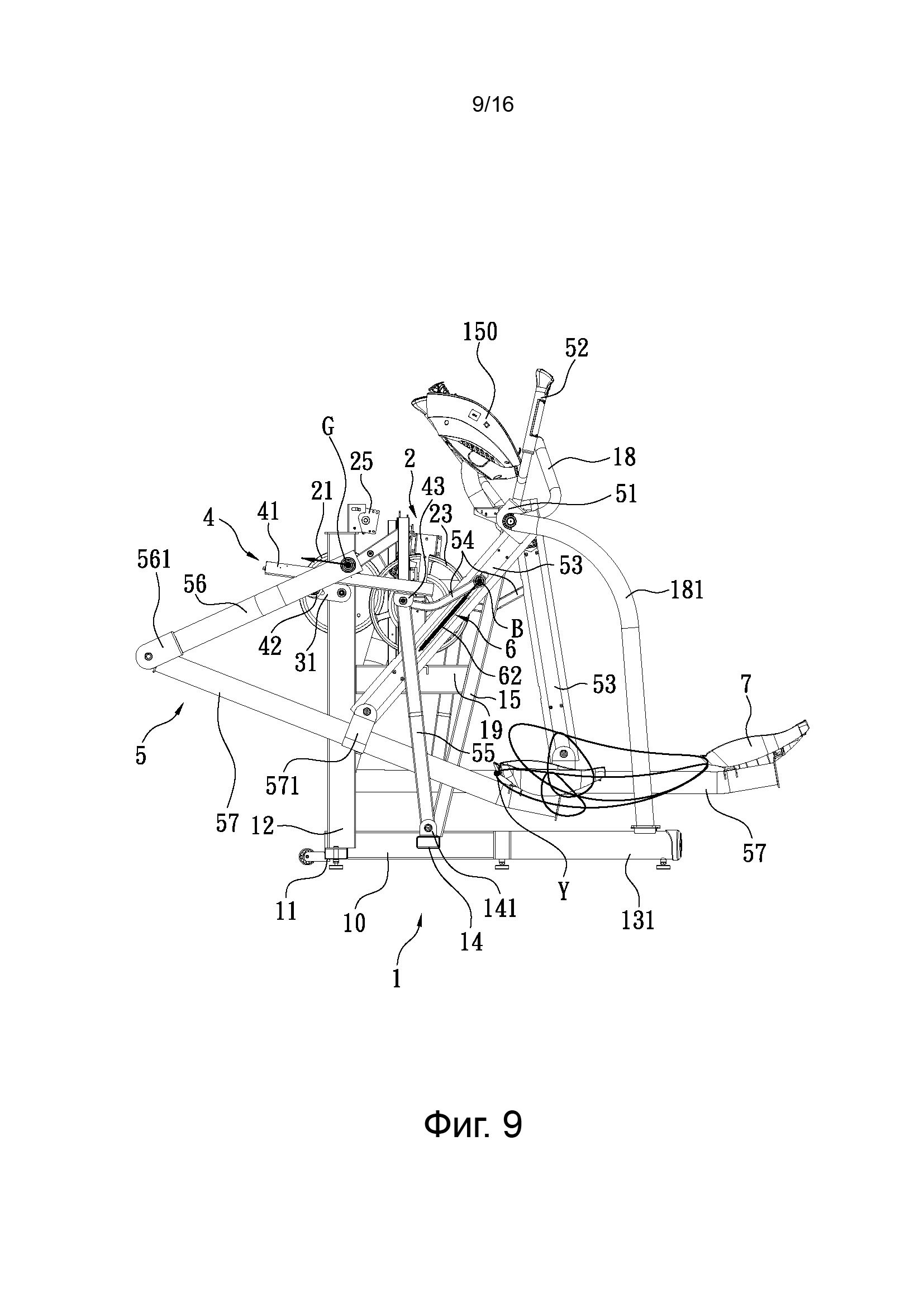
на фиг. 9 схематично показан спортивный тренажер с несколькими траекториями движения педалей в соответствии с настройками подъемно-опускающего блока в полом регулировочном звене и блока перемещения в шатуне, вид сбоку;
на фиг. 10 схематично показан спортивный тренажер с траекторией движения педалей, соответствующей установке подъемно-опускающего блока в верхнее положение, а блока перемещения – в крайнее заднее положение;
на фиг. 11 схематично показан спортивный тренажер с траекторией движения педалей, соответствующей установке подъемно-опускающего блока в верхнее положение, а блока перемещения – в крайнее переднее положение;
на фиг. 12 схематично показан спортивный тренажер с траекторией движения педалей, соответствующей установке подъемно-опускающего блока в нижнее положение, а блока перемещения – в крайнее заднее положение;
на фиг. 13 схематично показан спортивный тренажер с траекторией движения педалей, соответствующей установке подъемно-опускающего блока в нижнее положение, а блока перемещения – в крайнее переднее положение;
на фиг. 14 схематично показан спортивный тренажер с траекторией движения педалей, соответствующей режиму «велосипед», при нажатии на клавишу режима «велосипед» на пульте управления;
на фиг. 15 – кинематическая схема спортивного тренажера, иллюстрирующая различные возможные траектории движения педалей;
на фиг. 16 – кинематическая схема спортивного тренажера, соответствующего другому варианту его выполнения.
Предпочтительные варианты осуществления изобретения
На фиг. 1 и 2 показан спортивный тренажер с комбинированным движением согласно одному из возможных вариантов осуществления изобретения. Этот спортивный тренажер способен обеспечивать множество режимов движения и в основном содержит опорную раму 1, блок передачи 2, кривошипный узел 3, пару соединенных с кривошипами шатунов 4, пару соединительных механизмов 5 и пульт управления 150, с помощью которого пользователь может включать требуемый режим движения, чтобы педали тренажера перемещались по требуемой траектории движения без ручной настройки устройства. Кроме того, пульт управления 150 позволяет пользователю осуществлять точную настройку траектории движения педалей и установку требуемой нагрузки, чтобы педали тренажера перемещались по эргономичной замкнутой траектории, позволяя пользователю избежать получения травмы при использовании тренажера.
Опорная рама 1 содержит главную продольную балку 10, переднюю поперечную балку 11, установленную на переднем конце главной продольной балки 10, заднюю поперечную балку 13, установленную на заднем конце главной продольной балки 10, среднюю поперечную балку 14, установленную в средней части главной продольной балки 10, переднюю вертикальную стойку 12, поднимающуюся вверх от точки пересечения главной продольной балки 10 с передней поперечной балкой 11, левую боковую балку 131, отходящую назад от одного конца задней поперечной балки 13, правую боковую балку 132, отходящую назад от другого конца задней поперечной балки 13, и заднюю вертикальную стойку 15, отходящую вверх от точки пересечения главной продольной балки 10 со средней поперечной балкой 14. Пульт управления 150, называемый также панелью управления или электронной панелью управления, расположен на верхнем конце задней вертикальной стойки 15. Как показано на фиг. 7, пульт управления 150 содержит кнопку 153 включения режима эллиптического движения, кнопку 151 включения режима степпера и кнопку 152 включения режима велосипеда, а также множество кнопок 154 точной настройки. На задней вертикальной стойке 15 под пультом управления 150 расположены левая ось 16 и правая ось 17. Между левой и правой осями 16 и 17 закреплена опора 18 для рук. Между левой осью 16 и левой боковой балкой 131 расположен левый поручень 181, а между правой осью 17 и правой боковой балкой 132 установлен правый поручень 182. Между передней вертикальной стойкой 12 и задней вертикальной стойкой 15 расположена горизонтальная соединительная балка 19. От горизонтальной соединительной балки 19 отходит вертикальная балка 191.
Как показано на фиг. 3 и 4, на опорной раме 1 установлен блок передачи 2, содержащий первое колесо 21, первый ремень 22, второе колесо 23, выполненное из стальной отливки, второй ремень 24, электрогенератор 25 и натяжной шкив 26. Первое колесо 21 установлено на передней вертикальной стойке 12 опорной рамы 1. Второе колесо 23 установлено на вертикальной балке 191, отходящей вверх от соединительной балки 19. Электрогенератор 25 установлен в верхней части передней вертикальной стойки 12. Первый ремень 22 проходит вокруг первого колеса 21 и шкива (не показан), установленного соосно второму колесу 23, а второй ремень 24 проходит вокруг другого шкива (не показан), установленного соосно второму колесу 23, и шкива (не показан), установленного на ведомой оси электрогенератора 25, так что первое колесо 21 может вращать второе колесо 23, которое, в свою очередь, может вращать вал электрогенератора 25 для выработки электроэнергии. Натяжной шкив 26 контактирует с первым ремнем 22, поглощая энергию вибрации при использовании тренажера и, следовательно, снижая уровень шума и увеличивая срок службы спортивного тренажера.
Как показано на фиг. 1 – 3, кривошипный узел 3 содержит центральную ось 30, левый кривошип 31 и правый кривошип 33. Центральная ось 30 проходит через центр первого колеса 21 и далее сквозь переднюю вертикальную стойку 12, так что колесо 21 имеет возможность вращения на передней вертикальной стойке 12. Левый кривошип 31 прикреплен к одному концу центральной оси 30, а правый кривошип 33 – к другому концу центральной оси 30 и направлен противоположно левому кривошипу 31. Кроме того, кривошипный узел 3 содержит левый шатунный палец 32 и правый шатунный палец 34, причем левый шатунный палец 32 расположен на конце левого кривошипа 31, расположенного на расстоянии от центральной оси 30; а правый шатунный палец 34 расположен на конце правого кривошипа 33, находящегося на расстоянии от центральной оси 30.
Как показано на фиг. 1, 2 и 5, каждый из шатунов 4 содержит полый корпус 41, имеющий передний шарнир 42 и задний шарнир 43. Внутри полого корпуса 41 расположено перемещающее устройство 44 и блок 443 перемещения, приводимый в действие перемещающим устройством 44. Передний шарнир 42 каждого шатуна 4 шарнирно соединен с соответствующим левым или правым шатунными пальцами 32, 34, что показано точкой H на фиг. 8. Как показано на фиг. 5, перемещающее устройство 44 содержит электромотор 441 и резьбовой шток 442, вращаемый электромотором 441. Блок 443 перемещения находится в зацеплении с резьбой штока 442. Блок 443 перемещения содержит шарнирный палец 45 (фиг. 2 и 5), показанный точкой G на фиг. 8. Таким образом, электромотор 441 может вращать резьбовой шток 442, который, в свою очередь, перемещает блок 443 перемещения, так что шарнир G может совершать линейное перемещение вдоль полого корпуса 41, обеспечивая возможность регулирования положения точки G.
Как показано из фиг. 1, 2, 6 и 8, каждый из соединительных механизмов 5, установленных с одной стороны опорной рамы 1 и соединенных с блоком передачи 2, содержит полое регулировочное звено 53 с шарниром 51 в своей верхней части, боковое звено 56, нижнее звено 57 с педалью 7 на своем заднем конце, по существу вертикальное звено 55 и верхнее звено 54. На шарнире 51 смонтирована рукоятка 52. Шарнир 51 каждого соединительного механизма 5 соединен с соответствующей левой или правой осью 16, 17 задней вертикальной стойки 15. Рассматривая, например, левый соединительный узел 5, можно видеть, что шарнир 51 соединен с левой осью 16 задней вертикальной стойки 15 (левая ось 16 обозначена точкой A). Полое регулировочное звено 53 содержит подъемно-опускающее устройство 6, предназначенное для перемещения подъемно-опускающего блока 63, шарнирно соединенного в точке B с одним концом верхнего звена 54. Задний шарнир 43 шатуна 4 соединен с другим концом верхнего звена 54 и верхним концом по существу вертикального звена 55 (задний шарнир 43 обозначен точкой C, указывающей на штифт данного шарнира). Нижний конец по существу вертикального звена 55 шарнирно соединен с шарниром 141, неподвижно установленным на средней поперечной балке 14 и обозначенным точкой E. Боковое звено 56 на своем нижнем конце содержит шарнир 561, с которым соединен передний конец нижнего звена 57 (шарнир 561 обозначен точкой F). Шарнирный палец 45 блока перемещения 443, показанный точкой G, шарнирно соединен с верхним концом бокового звена 56. В середине нижнего звена 57 установлен шарнир 571, соединенный с нижним концом полого регулировочного звена 53 (шарнир 571 обозначен точкой D).
Как показано на фиг. 6 и 8, подъемно-опускающее устройство 6, смонтированное в полом регулировочном звене 53, содержит электромотор 61 и резьбовой шток 62, отходящий от ведущего вала электромотора 61. Резьбовой шток 62 входит в зацепление с подъемно-опускающим блоком 63, содержащим шарнир (обозначенный точкой B), соединенный с одним концом верхнего звена 54 (также показано на фиг. 10). Таким образом, электромотор 61 может вращать резьбовой шток 62, который, в свою очередь, перемещает блок 63, так что шарнир B может совершать линейное перемещение вдоль полого регулировочного звена 53, обеспечивает возможность регулирования положения точки B.
Как показано на фиг. 8, одной из конструктивных особенностей настоящего изобретения является то, что шарнир 561 бокового звена 56 (обозначенный точкой F) и нижний конец полого регулировочного звена 53 (обозначенный точкой D) расположены, соответственно, с двух сторон от вертикальной оси V, проходящей через центр первого колеса 21 (обозначенный точкой Q) и по передней вертикальной стойке 12; шарнир 561 бокового звена 56 (обозначенный точкой F) и педаль 7 расположены, соответственно, с двух сторон от вертикальной оси X, проходящей через соответствующий шарнир 141, неподвижно установленный на средней поперечной балке 14. Таким образом, спортивный тренажер может обеспечивать множество режимов движения, так что каждая педаль 7 может перемещаться по множеству траекторий Y (фиг. 9), являющихся более эргономичными, чем траектории движения педалей обычных спортивных тренажеров. Это позволяет защитить пользователя от получения травмы. Эллиптическая траектория движения каждой педали 7 может быть определена взаимно перпендикулярными большой и малой осями (длина большой оси больше длины малой оси).
Соответствующий изобретению спортивный тренажер может обеспечивать множество режимов движения, включая режим эллиптического движения, режим степпера и режим велосипеда. С помощью пульта управления 150 пользователь может посылать команду с целью настройки шатунов 4 и/или подъемно-опускающего устройства 6 в полом регулировочном звене 53 с целью изменения конфигурации каждого соединительного механизма 5, чтобы спортивный тренажер мог работать в режиме движения, желательном для пользователя.
Траекторию Y движения каждой педали 7 и соответствующую нагрузку можно регулировать путем изменения положений блоков перемещения 443 шатунов 4 или подъемно-опускающих блоков 63 полых регулировочных звеньев 53, как показано на фиг. 9 – 14. При работе спортивного тренажера шарнирный палец 45, обозначенный точкой G, перемещается по практически эллиптической траектории.
Как видно на фиг. 10, 11, при перемещении точки B подъемно-опускающего блока 63 в верхнее положение, траектория движения Y каждой педали 7 заставляет пользователя совершать больший шаг и затрачивать при этом большее усилие. С помощью шатуна 4 можно осуществлять тонкую регулировку этой траектории, представляющей собой практически замкнутый эллипс. При перемещении точки G в крайнее заднее положение, как показано на фиг. 10, каждая педаль 7 перемещается по эллиптической замкнутой траектории Y1. При перемещении точки G в крайнее переднее положение, как показано на фиг. 11, каждая педаль 7 перемещается по эллиптической замкнутой траектории Y2, малая ось которой больше малой оси эллиптической траектории Y1, показанной на фиг. 10. При перемещении точки B подъемно-опускающего блока 63 в нижнее положение, как показано на фиг. 12 и 13, траектория, по которой перемещается каждая педаль 7, превращается в эллиптическую замкнутую траекторию с приподнятым передним участком, так что пользователь должен совершать шаги меньшего размера. Нагрузка, испытываемая при этом пользователем, аналогична нагрузке при подъеме по лестнице, вследствие чего режим работы тренажера, соответствующий данной траектории, называется режимом степпера. С помощью шатуна 4 можно осуществлять тонкую регулировку этой траектории. При перемещении точки G в крайнее заднее положение, как показано на фиг. 12, каждая педаль 7 перемещается по эллиптической замкнутой траектории Y3. При перемещении точки G в крайнее переднее положение, как показано на фиг. 13, каждая педаль 7 перемещается по эллиптической замкнутой траектории Y4, малая ось которой больше малой оси эллиптической траектории Y3, показанной на фиг. 12.
Как видно на фиг. 7, при включении пользователем кнопки 153 режима эллиптического движения на пульте управления 150 точка B подъемно-опускающего блока 63 перемещается в верхнее положение, так что каждая педаль 7 может двигаться по эллиптической замкнутой траектории Y1, Y2 (фиг. 10 и 11), требующей от пользователя выполнения больших шагов с высокой нагрузкой. При этом положении точки B спортивный тренажер работает в режиме эллиптического движения по выбору пользователя. Кроме того, одна кнопка точной настройки 154 на пульте управления 150 дает возможность перемещения точки G, расположенной на шарнирном пальце 45 каждого шатуна 4, вдоль полого корпуса 41, что дает возможность регулирования длины малой оси эллиптической траектории.
Как показано на фиг. 7, при включении пользователем на пульте управления 150 кнопки 151 режима степпера точка B подъемно-опускающего блока 63 перемещается в нижнее положение, так что каждая педаль 7 может двигаться по эллиптической замкнутой траектории Y3, Y4 с приподнятым передним участком (фиг. 12 и 13), требующей от пользователя выполнения небольших шагов. При этом положении точки B спортивный тренажер работает в режиме степпера. Кроме того, одна кнопка точной настройки 154 на пульте управления 150 дает возможность перемещения точки G, расположенной на шарнирном пальце 45 каждого шатуна 4, вдоль полого соединительного корпуса 41, что дает возможность регулирования наклона малой оси эллиптической траектории.
Как видно на фиг. 7, при нажатии пользователем на пульте управления 150 кнопки 152 режима велосипеда каждая педаль 7 может перемещаться по эллиптической замкнутой траектории (фиг. 14), длина большой оси которой больше длины малой оси, но отношение длины малой оси к длине большой оси выше, чем в рассмотренных ранее режимах. Как показано на фиг. 14 и 15, пользователь может нажимать кнопку 154 точной настройки на пульте управления 150 для одновременного регулирования положения блока перемещения 443, обозначенного точкой G (расположенной на шарнирном пальце 45), и подъемно-опускающего блока 63, обозначенного точкой B, с целью незначительного изменения длин большой и малой осей для получения конкретных замкнутых траекторий Y51, Y52 или Y53. Перемещение подъемно-опускающего блока 63 и его точки B по линейной траектории осуществляется с помощью резьбового штока 62. Перемещение блока перемещения 443 и его точки G по линейной траектории осуществляется с помощью резьбового штока 442. В целях более подробной иллюстрации режимов движения спортивного тренажера линейную траекторию перемещения точки B подъемно-опускающего блока 63 можно разделить на три равных участка, получив при этом пять положений B1, B2, B3, B4 и B5 точки B в направлении снизу-вверх, при этом положение B1 является нижним положением точки B, а положение B5 – её верхним положением. Аналогичным образом, линейную траекторию перемещения точки G блока перемещения 443 можно разделить на два равных участка, получив при этом три положения G1, G2 и G3 точки G в направлении спереди назад, при этом положение G1 является крайним передним положением точки G, а положение G3 – её крайним задним положением. В частности, траектория движения каждой педали 7 может быть определена положением точки B и положением точки G; в целом, она может быть описана уравнением B + G → Y, которое означает следующее: когда положение точки B соответствует положению точки G, они могут образовывать замкнутую траекторию Y. При работе тренажера в режиме велосипеда путем нажатия кнопки 154 точной настройки можно переместить точку B подъемно-опускающего блока 63 в положение B2, а точку G блока перемещения 443 можно переместить в положение G1. Таким образом, каждая педаль 7 может перемещаться по замкнутой траектории, определяемой выражением: B2 + G1 → Y51. Путем повторного нажатия кнопки 154 точной настройки точку B подъемно-опускающего блока 63 можно переместить в положение Bx, находящееся между положением B1 и положением B2, но немного ближе к положению B2, а точку G блока перемещения 443 можно переместить в положение Gx, находящееся между положением G1 и положением G2. Таким образом, каждая педаль 7 может перемещаться по замкнутой траектории 52, определяемой выражением: Bx + Gx → Y52. Путем повторного нажатия кнопки 154 точной настройки точку G блока перемещения 443 можно переместить в положение G2. Таким образом, каждая педаль 7 может перемещаться по замкнутой траектории 53, определяемой выражением: Bx + G2 → Y53. При работе тренажера в режиме велосипеда, замкнутые траектории Y51, Y52 и Y53, по которым перемещаются педали 7, являются разными, причем каждая траектория имеет большую ось определенной длины и малую ось определенной длины. Таким образом, режим велосипеда включает в себя три траектории: B2 + G1 → Y51, Bx + Gx → Y52 и Bx + G2 → Y53; при которых точка B может находиться в положениях B2 или Bx, а точка G может находиться в положениях G1, Gx или G2. Таким образом, путем перемещения точек B и G в соответствующие положения, как было показано выше, можно получить конкретные замкнутые траектории движения Y51, Y52 или Y53 каждой из педалей 7. При работе тренажера в режиме эллиптического движения, когда точка B подъемно-опускающего блока 63 перемещается в верхнее положение B5, каждая педаль 7 может двигаться по эллиптической замкнутой траектории, требующей от пользователя выполнения больших шагов с высокой нагрузкой, причем данную траекторию можно дополнительно изменить с помощью шатуна 4. Когда точка G блока перемещения 443 перемещается в крайнее заднее положение G3, каждая педаль 7 может двигаться по замкнутой траектории Y1, определяемой выражением B5 + G3 → Y1. Когда точка G блока перемещения 443 перемещается в крайнее переднее положение G1, каждая педаль 7 может двигаться по замкнутой траектории Y2, определяемой выражением B5 + G1 → Y2. Если в режиме эллиптического движения пользователю требуется небольшая длина шага, точку B подъемно-опускающего блока 63 можно переместить в положение B3. Шатун 4 можно использовать для незначительного изменения траектории движения педалей 7. Например, при перемещении точки G блока перемещения 443 в положение G3, каждая педаль 7 будет двигаться по замкнутой траектории Y6, определяемой выражением B3 + G3 → Y6. При перемещении точки B подъемно-опускающего блока 63 в положение B3 и перемещении точки G блока перемещения 443 в положение G1, каждая педаль 7 может двигаться по замкнутой траектории Y7, определяемой выражением B3 + G1 → Y7. Таким образом, режим эллиптического движения включает в себя четыре комбинации: B5 + G3 → Y1, B5 + G1 → Y2, B3 + G3→ Y6 и B3 + G1 → Y7. Иными словами, точку B можно перемещать в положение B3 или B5, а точку G при этом можно перемещать в положение G1 или G3. В режиме степпера при перемещении точки B подъемно-опускающего блока 63 в нижнее положение B1, передний участок эллиптической замкнутой траектории, по которой движется каждая педаль 7, поднимается вверх, а длина шага уменьшается. Траекторию, по которой движется каждая педаль 7, можно подвергнуть тонкой регулировке с помощью шатуна 4. Например, при перемещении точки G блока перемещения 443 в крайнее заднее положение G3 каждая педаль 7 будет совершать движение по эллиптической замкнутой траектории Y3, которая определяется выражением B1 + G3 → Y3. При перемещении точки G блока перемещения 443 в крайнее переднее положение G1 каждая педаль 7 движется по эллиптической замкнутой траектории Y4, определяемой выражением B1 + G1 → Y4. Таким образом, режим степпера включает в себя две комбинации: B1 + G3 → Y3 и B1 + G1 → Y4. Иными словами, точку B можно переместить в положение B1, а точку G при этом можно перемещать в положение G1 или положение G3. На основании изложенного видно, что три основных режима движения включают в себя множественные комбинации, определяемые, соответственно, следующими выражениями: B2 + G1 → Y51, Bx + Gx → Y52, Bx + G2 → Y53 (режим велосипеда); B5 + G3 → Y1, B5 + G1 → Y2, B3 + G3→ Y6, B3 + G1 → Y7 (режим эллиптического движения); B1 + G3 → Y3, B1 + G1 → Y4 (режим степпера). Как уже было указано, траектории Y51, Y52, Y53, Y1, Y2, Y3, Y4, Y6 и Y7 являются разными, т.е. каждая траектория является замкнутой, имеет большую ось конкретной длины и малую ось конкретной длины, и может быть получена путем перемещения точки B блока перемещения 443 в одно из положений B1, Bx, B2, B3, B4, B5 и перемещения точки G подъемно-опускающих блоков 63 в одно из положений G1, Gx, G2, G3, G4.
На фиг. 16 показан еще один возможный вариант выполнения спортивного тренажера согласно настоящему изобретению, который, в целом, содержит опорную раму (не показана), блок передачи (не показан), кривошипный узел 3, пару шатунов 4, пару соединительных механизмов, и пульт управления (не показан). Опорная рама, блок передачи и пульт управления не изображены, поскольку они аналогичны этим элементам в описанном выше варианте выполнения. Блок передачи, аналогичный блоку передачи в рассмотренном выше варианте, установлен на опорной раме и содержит первое колесо, установленное на опорной раме, и электрогенератор, приводимый этим первым колесом. Кривошипный узел 3, аналогичный описанному выше кривошипному узлу, содержит центральную ось, проходящую через центр первого колеса и далее через опорную раму, таким что первое колесо имеет возможность вращения на опорной раме. Левый кривошип установлен на одном конце центральной оси, а правый кривошип установлен на другом конце центральной оси и направлен в противоположную сторону. Каждый из соединительных механизмов содержит полое регулировочное звено 53 с шарниром 51 на своем верхнем конце, боковое звено 56, нижнее звено 57 с закрепленной на его заднем конце педалью 7, по существу вертикальное звено 55 и верхнее звено 54. Полое регулировочное звено 53 содержит подъемно-опускающее устройство (не показано), предназначенное для перемещения подъемно-опускающего блока (не показан), шарнирно соединенного с одним концом верхнего звена 54. Нижний конец по существу вертикального звена 55 шарнирно соединен с фиксированным шарниром опорной рамы. Шарнир 51 полого регулировочного звена 53 шарнирно соединен с опорной рамой. В нижней части бокового звена 56 имеется шарнир, соединенный с нижним звеном 57. Нижний конец полого регулировочного звена 53 шарнирно соединен с передним концом нижнего звена 57. Каждый из шатунов 4 содержит полый корпус (не обозначен) с передним шарниром (не обозначен) и задним шарниром (не обозначен), перемещающее устройство (не показано) и блок перемещения (не показан), приводимый перемещающим устройством и снабженный шарнирным пальцем (не обозначен), соединенным с верхним концом бокового звена 56. Передний шарнир каждого шатуна 4 соединен с одним концом соответствующего кривошипа 31, 33. Задний шарнир каждого шатуна 4 соединен с другим концом верхнего звена 54 и верхним концом по существу вертикального звена. Педаль 7 в данном варианте выполнения также может двигаться по множеству эллиптических замкнутых траекторий Y, которые являются эргономичными, так что пользователь защищен от риска получения травмы.
Спортивный тренажер согласно настоящему изобретению позволяет пользователю изменять конфигурацию соединительных механизмов 5 с помощью пульта управления 150, чтобы задавать требуемый режим движения, что дает возможность каждой педали 7 двигаться по эргономичной замкнутой траектории, благодаря чему пользователь защищен от риска получения травмы.
Реферат
Спортивный тренажер с комбинированным движением включает в себя пульт управления (150), обеспечивающий возможность работы в множестве различных режимов движения и позволяющий пользователю подавать команду на изменение конфигурации соединительных механизмов (5) спортивного тренажера, чтобы тренажер работал в требуемом режиме движения без ручной настройки и педаль (7) на каждом соединительном механизме (5) перемещалась по замкнутой траектории. Пульт управления (150) позволяет также пользователю осуществлять точную настройку траектории и соответствующей её нагрузки. Траектория, по которой перемещается каждая педаль (7), является эргономичной, так что пользователь защищен от получения травмы. 11 з.п. ф-лы, 16 ил.
Комментарии