Устройство для восстановления равновесия человеческого тела - RU2203119C2
Код документа: RU2203119C2
Чертежи








Описание
Изобретение относится к усовершенствованному устройству, предназначенному для восстановления равновесия человеческого тела.
Такое восстановление равновесия, необходимое по многим причинам, влечет за собой выполнение операций по коррекции и реабилитации, которые можно отнести к "общей биомеханике". Такие операции требуются, в частности, в случае неподвижности тазового пояса, плечевого пояса и всего позвоночного столба. Они могут также выполняться при возвращении на место крестца относительно подвздошной кости, что вызвано полученной травмой, или при травмах нижних конечностей, или гравитационных микротравмах, сопровождающих и усугубляющих состояние в пожилом возрасте.
Наряду с этими операциями "общей биомеханики" целесообразно также иметь возможность восстановить нарушения осанки, следующие за приступами головокружения, операциями и гравитационными нарушениями равновесия различного происхождения, и полного перепрограммирования картины нагрузки проприорецепторов голеностопных суставов и коленей.
Для восстановления таким образом равновесия обратились также к методам западной и азиатской традиционной медицины, нацеленным на получение достаточного равновесия человеческого скелета и основанным на чередующихся поворотах, растяжениях и изгибаниях от ног до головы; такие методы, однако, доступны только здоровым людям, и поэтому являются исключительно профилактическими методами, которые должны применяться на осознанной и долгосрочной основе.
Кроме этих методов в течение длительного времени предлагалось изготавливать устройство для автоматического выполнения восстановительных движений.
Таким образом, как вытекает из документа FR-2561911, предлагается устройство для растяжения позвоночного столба человека под воздействием веса его тела, причем решение, описанное в этом документе, относится к разновидности шарнирного стола, позволяющего поместить пациента в положение, обеспечивающее утоление боли.
Решение такого рода допускает лечение пациентов, чьи межпозвоночные диски демонстрируют патологию сжатия, допуская также растягивание страдающих артритом тазобедренных суставов.
Оно не может поэтому быть использовано в случаях, когда существует намерение выполнять вращательные движения, в особенности таза. Кроме того, шарнирный стол такого типа сложен в эксплуатации и очень неудобен для пользователя.
Для поддержания подвижности таза предлагается, как видно из FR-A-2608057, изготавливать кресло, состоящее из сиденья, которое поворачивается в горизонтальной плоскости вокруг вертикальной оси, в то время как спинка остается неподвижной относительно указанного сиденья.
Конструкция такого типа допускает, таким образом, вращение таза в том или другом направлении относительно неподвижного торса, причем существует возможность, в зависимости от вида лечения, изменять амплитуду вращательного движения. Кроме того, такая конструкция позволяет зафиксировать сиденье и заставить работать суставы (голеностопы, колени) путем движения скользящих блоков, на которые пользователь ставит ноги.
Хотя такая установка допускает поддержания подвижности таза и суставов, она не пригодна, однако, для истинного восстановления равновесия тела, предусматривающего восстановление подвижности скелета во всех трех направлениях в пространстве по координатам X, Y и Z.
В этом отношении патент Швейцарии 328969 предлагает аппарат, состоящий из двух устройств, предназначенных для закрепления сиденья пациента, причем эти устройства установлены на доске, которая может двигаться относительно среднего горизонтального положения. Первое передаточное устройство придает колебательное движение относительно оси и второе устройство придает доске колебательное движение на поверхности, которая по меньшей мере, приблизительно располагается в вертикальной плоскости, причем все это выполняется таким образом, что доске придается движение, являющееся результирующей указанных двух колебательных движений.
Поэтому устройство такого типа может придавать тазу пациента комбинированное колебательное движение как в горизонтальной, так и в вертикальной плоскости, причем амплитуду колебания в вертикальной плоскости перед использованием можно регулировать.
И в данном случае нет возможности действительно восстановить равновесие тела и, более того, конкретное решение, описанное в этом документе, предусматривает средства, несовместимые с лечением, нацеленным на восстановление равновесия тела. Это объясняется тем, что ноги пациента зафиксированы в "блоках", что может оказаться опасным для коленей, если только придаваемое им движение не будет бесконечно мало. Наличие ремня для крепления таза не допускает крестцово-подвздошной подвижности. И, наконец, корсет, удерживающий грудную клетку, может мешать дыханию, и не допускает работы туловища на скручивание. Более того, ни в коем случае устройство не предусматривает осуществление лечения в сидячем положении.
Кроме технической сферы самой реабилитации предлагается также, более конкретно для целей спортивных тренировок, выпускать качающиеся доски, которые могут быть или могут не быть механизированы, как это очевидно, в частности из документов США US-A-2827894 и US-A-4290601, с возможностью регулировать амплитуду колебания перед использованием, предусмотренную в первом из этих документов, и с возможностью предварительно задать амплитуду колебания, предусмотренную во втором документе.
В сфере спортивных тренировок предлагаются, как видно из US-A-4313603, устройства, состоящие из платформы, на которой стоит пользователь и которая может выполнять придаваемые ей чередующиеся вращательные движения в горизонтальной плоскости, причем движение достигается с помощью средств, которые приводятся в действие непосредственно пользователем.
Что касается документов, рассмотренных выше, то решения, описанные в последних трех документах, также не позволяют восстановить подвижность скелета во всех трех направлениях в пространстве, вне зависимости от того, производится ли это в стоячем, сидячем или ином положении, при том, что эти условия имеют ключевое значение для истинного восстановления равновесия человеческого тела.
В настоящее время найден и является предметом настоящего изобретения новый тип подвижной платформы, на которой пациент может удерживаться в вертикальном, сидячем или ином положении, которая имеет простую конструкцию, удобна в эксплуатации, многофункциональна и не только позволяет поддерживать подвижность таза и суставов, но и допускает истинное восстановление равновесия человеческого тела за счет придания подвижности во всех трех направлениях в пространстве с координатами X, Y и Z, допуская выполнение чередующихся и ритмичных последовательностей сжатия и снятия нагрузки, поддающихся регулированию по всем параметрам, причем такое устройство позволяет в основе скорректировать нарушения равновесия в центре тяжести человеческого тела, расположенном в тазе.
Эти нарушения равновесия, которые с возрастом последовательно усиливаются из-за недостаточной терапии, ведут к появлению медленной и неуверенной походки и затем к падениям, которым подвержен стареющий человеческий организм.
Устройство, являющееся предметом настоящего изобретения, допускает выполнение всех операций, ведущих к восстановлению равновесия всего человеческого скелета, а именно - эффективное осуществление восстановления подвижности крестцово-подвздошных суставов, поясничного отдела позвоночника, торако-скапулярно-цервикального комплекса.
Этого согласно изобретению достигают путем придания подвижности центрам тяжести участков тела лиц, находящихся в сидячем, стоячем, согнутом, согнутом на три четверти и т.д., во всех трех направлениях в пространстве с координатами X, Y и Z. Такое придание подвижности достигается с помощью комбинации боковых колебаний, поворота вокруг диагонали между поясами, чередующихся вращений таза и торса и наклонов вперед-назад.
Вся эта мышечно-составная активность вызывается автоматически с помощью контролируемой механизации в пределах физиологического диапазона движения скелета и без какого-либо вмешательства со стороны пациента.
В случае необходимости возможно выполнение активной работы с преодолением сопротивления с целью улучшения мышечной динамики.
Это устройство допускает также полное перепрограммирование картины нагрузки проприорецепторов голеностопных суставов и коленей.
Оно допускает также реабилитацию голеностопных суставов и восстановление полного диапазона движения. Кроме того, устройство, являющееся предметом настоящего изобретения, может использоваться вне зависимости от телосложения пациента.
В целом устройство, являющееся предметом настоящего изобретения и позволяющее восстановить равновесие человеческого тела, состоит, по существу, из подвижной круглой платформы, предназначенной для поддержки пациента и совершающей придаваемое ей колебательное движение, причем указанная платформа совершает придаваемое ей колебательное движение вокруг центральной точки опоры, а это движение сочетается с возвратно-поступательным вращательным движением, осуществляясь посредством одного двигателя, соединенного с передаточными средствами, и без вмешательства пациента, в плоскости платформы, поддерживающей пациента, вокруг геометрической оси, перпендикулярной указанной платформе и проходящей через ее центр, причем амплитуда и скорость как колебания, так и вращения могут регулироваться и меняться в процессе использования; кроме того, устройство содержит средство, позволяющее удерживать пациента на платформе в стоячем, сидячем или согнутом положении.
Возможность регулирования позволяет пользователю, с одной стороны, разместиться на платформе в то время, когда платформа находится в горизонтальном положении, и с другой стороны, позволяет изменять амплитуду и скорость как колебания, так и вращения в зависимости от выполняемого курса лечения, причем можно изменять эти факторы согласно программе в процессе применения в зависимости от выполняемого курса лечения.
Кроме того, конструкция устройства, являющегося предметом настоящего изобретения позволяет также использовать платформу в горизонтальной плоскости, прекращать колебательное движение, оставив только вращательное движение.
Согласно одному варианту реализации, допускающему выполнение разнообразных курсов лечения, данная базовая платформа соединена со средством, позволяющим удерживать в вертикальном положении на подвижной платформе по меньшей мере позвоночный столб.
Кроме того, преимущественно применяются опоры для рук, причем эти опоры могут быть размещены относительно пациента или по сторонам, и/или перед ним, и/или выше него, образуя в последнем случае скобы для вытяжения.
Опоры для рук предпочтительно должны регулироваться по высоте. Кроме того, в случае боковых опор они могут также выполнять придаваемое им возвратно-поступательное скользящее движение по горизонтали.
И, наконец, устройство, являющееся предметом настоящего изобретения, предпочтительно соединяется со средствами, допускающими выполнение в случае необходимости вытяжения вдоль оси тела, в особенности в случае, когда пациент находится в стоячем, вертикальном положении.
В этом случае эти средства состоят, например, из стационарной стойки в форме скобы, поддерживающей элемент, состоящий из охватывающего подборок ремня, позволяющего удерживать пациента в вертикальном положении, с одновременной возможностью выполнения вытяжения вдоль оси тела; в такое случае подбородочный ремень преимущественно крепят к концу троса, подвергаемого воздействию регулируемого тянущего усилия, причем это усилие прилагают, например, используя противовес, который может скользить по вертикальной опорной направляющей, или любое другое аналогичное средство.
Следовательно, с помощью такого устройства можно разместить пациента на платформе в любом положении, в том числе в стоячем, согнутом или сидячем.
Когда пациент проходит курс лечения в сидячем положении, сиденье крепят непосредственно к подвижной платформе. В этом случае сиденье не имеет спинки и имеет форму сиденья типа табурета, на котором пациент может располагаться или обычным образом - согнутые в коленях ноги перед собой, или ноги по сторонам, как будто сидя в седле. Такое сиденье может быть ориентировано под углом 90o относительно каждой стороны горизонтальной плоскости и наклонено вверх и вниз относительно вертикальной оси при возможности варьировать величину наклона, причем этот наклон преимущественно находится в пределах 5-30o.
Изобретение и преимущества, которыми оно обладает, можно будет лучше понять из приведенного далее варианта его реализации в виде не
устанавливающего ограничений описания, проиллюстрированного на прилагаемых чертежах, где
на фиг.1 и 2 показаны соответственно изображения в вертикальной проекции и сверху устройства,
изготовленного согласно настоящему изобретению;
на фиг.3 показано изображение в вертикальной проекции спереди, более детально демонстрирующее конструкцию такого устройства;
на фиг. 4
- изображение сверху, демонстрирующее способ управления подвижной платформой;
на фиг.5 - изображение в вертикальной проекции конструкции с фиг.4, демонстрирующее платформу в горизонтальном
положении;
на фиг. 6 - изображение в направлении А с фиг.4, демонстрирующее, каким образом наклоняется опорная платформа для того, чтобы иметь возможность придать ей колебательное движение;
на фиг. 7 - изображение в направлении В с фиг.4, демонстрирующее, каким образом можно придать указанной опорной платформе вращение с чередованием направления;
на фиг.8 и 9 показаны
соответственно изображения в вертикальной проекции и сверху альтернативной формы реализации изобретения.
В остальной части описания изобретение будет описано на примере устройства, в котором пациент помещен в вертикальном стоячем положении, но которое может также использоваться пациентом в сидячем положении, когда единственной адаптацией устройства, являющегося предметом настоящего изобретения, является установка на подвижной платформе, являющейся ключевым элементом изобретения, сиденья, на котором сидит пациент. В таком случае сиденье не должно иметь спинки, должно иметь конструкцию, при которой пациент может сидеть нормально или верхом. Кроме того, указанное сиденье предпочтительно должно устанавливаться на опоре, высота которой регулируется, и может быть ориентировано или в горизонтальной плоскости относительно каждой из сторон, или же может быть наклонено вверх и вниз.
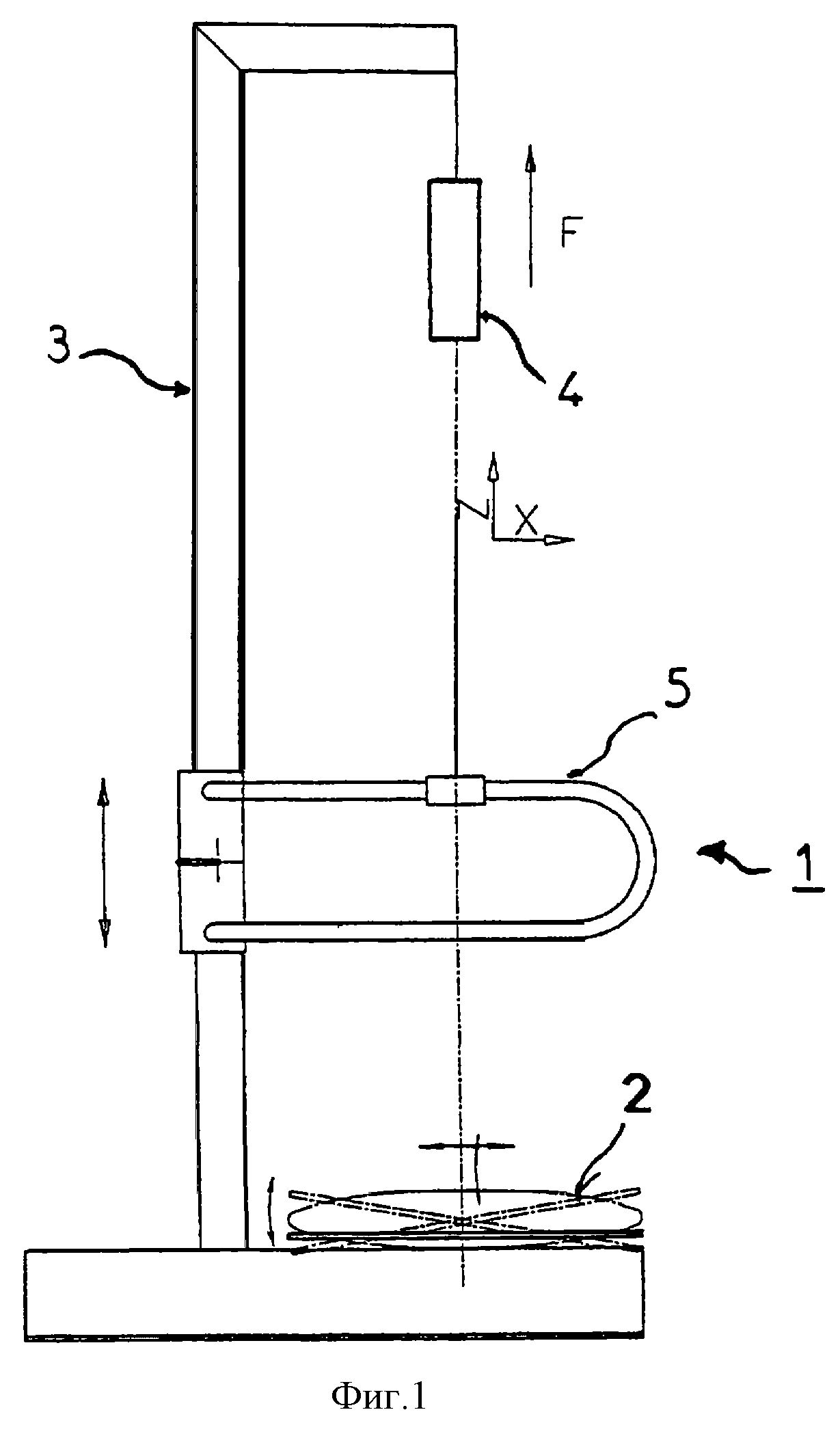
Как показано на прилагаемых чертежах и, более конкретно, на фиг.1-3, устройство, являющееся предметом настоящего изобретения и обозначенное в целом позицией (1) состоит, в целом, из механизированной платформы (2), которая служит опорой для ног пациента, причем эта платформа выполняет колебательное движение относительно центральной опорной оси наряду с придаваемым ей вращательным движением с поочередно меняющимся направлением вращения.
С этой платформой соединена стационарная стойка (3), в данном случае в форме скобы, которая поддерживает элемент (4), - в данном случае охватывающего подбородок ремня, позволяющего удерживать пациента в вертикальном положении на платформе (2), с одновременной возможностью выполнения при желании вытяжения вдоль оси тела.
Как ясно показано на фиг.3, это вытяжение просто можно получить путем крепления подбородочного ремня (4) к концу троса, подвергаемого воздействию растягивающего усилия (F), развиваемого, например, посредством противовеса (5), который может скользить по вертикальной стойке (3), допуская стабилизацию вертикального колебательного движения головы пациента синхронно с колебанием платформы (2). По всем признакам противовеса (5) массой пять килограммов достаточно для большинства проходящих курс лечения пациентов. Ясно, что такой противовес можно заменить на более тяжелый или более легкий. Аналогичным образом возможно использование любой другой системы балансировки.
Как было указано ранее, подвижная платформа с опорой для ног (2) имеет механизированную конструкцию и может, с одной стороны, выполнять придаваемое ей колебательное движение относительно центральной опорной оси и, с другой стороны, выполнять придаваемое ей вращательное движение с поочередно меняющимся направлением вращения, причем эти движения изображены на фиг.1 и 2.
На фиг.3-6 проиллюстрирован один вариант реализации, позволяющий добиться такого сочетания движений, а также способ, которым можно регулировать их амплитуду.
На фиг. 3-6 колебательное движение, амплитуда которого может регулироваться, достигается путем установки платформы (2) на центральной опорной оси (6) посредством шарового шарнира (7). Опорная ось (6) платформы (2) устанавливается на конце штока (8) цилиндрического исполнительного механизма (9).
С нижней стороны платформы (2) расположено кольцо (10), к которому прижаты два ролика (11), приводимые во вращение вокруг вертикальной оси Z посредством шатуна (12), соединенного с ведущим диском (13). Диск (13) приводится во вращение двигателем (14) посредством шкива (15) и приводного ремня (16). Ведущий диск (13) установлен на колесиках (17). Кроме того, на периферии кольца помещен ролик (18), скользящий по вертикальной боковой направляющей (19) и предназначенный для того, чтобы не допустить вращения диска и получить таким образом колебательное движение.
Благодаря такой конструкции оказывается возможным придать колебательное движение платформе (2) путем простого варьирования ее наклона относительно горизонтали просто за счет применения цилиндрического исполнительного механизма.
Амплитуда колебаний будет зависеть от наклона платформы (2), который может достигать целых 10o.
Согласно настоящему изобретению платформа (2) совершает также придаваемое ей вращательное движение. Как ясно видно из фиг.4, 6 и 7, такое вращательное движение получают путем движения направляющей (19), по которой движется ролик (18), установленный на периферии платформы (2). Для этого направляющую (19) устанавливают на опору (20), которая может скользить по неподвижному основанию (21). Эксцентрик (22) управляет соединительным штоком (23).
Эксцентрик (22) приводится во вращение, например, посредством двигателя (14) через приводной ремень (25), к которому прижимается натяжное устройство для ремня (24). За счет регулирования эксцентричности можно варьировать амплитуду вращения платформы (2) с чередованием направления. Такая регулируемая амплитуда вращения с чередованием направления может достигать 30o.
В качестве двигателя используется обычный двигатель с возможностью или регулировать число оборотов вручную, или программировать его, например, с изменением в процессе выполнения процедур. В то время как при обычном применении двигатель всегда вращается в одном направлении можно предусмотреть изменение с заданной частотой направления его вращения на противоположное.
И, наконец, устройство, являющееся предметом изобретения, содержит боковые опоры (5), которые могут регулироваться по высоте и которым может быть придано возвратно-поступательное скользящее движение по горизонтали.
В варианте реализации, проиллюстрированном на фиг.1-3, боковые опоры (5) являются полукруглыми и расстояние между ними можно регулировать с помощью соединительных штоков (26).
Команда на возвратно-поступательное скольжение по горизонтали передается от вращательного движения платформы (2) с чередованием направления, с его усилением.
Кроме того, движение боковых опор (5) может быть замедлено для того, чтобы обеспечить сопротивление движению пациента.
Предпочтительно боковые опоры (5) крепятся на стойке (3).
И, наконец, возможно применение дополнительных опор, например, расположенных перед пациентом или над ним.
Альтернативный вариант, проиллюстрированный на фиг.8 и 9, содержит платформу (2), привод которой осуществляется способом, сходным со способом, описанным выше.
Отличия заключаются, в основном, в конструкции дополнительных средств и более конкретно опор, которые могут быть связаны с такой платформой.
В этом альтернативном варианте по боковым сторонам платформы (2) размещаются две вертикальные портальные рамы (30), закрепленные по четырем углам конструкции (31), образующей навес над указанной платформой и ее средствами привода.
На этих двух портальных рамах (30) по сторонам, перед и над пациентом размещаются опоры для рук (32, 33).
Аналогичным образом портальные рамы могут быть использованы в качестве опорных средств (не показаны), допускающих вытяжение вдоль оси тела.
В этой форме боковые опоры (32) состоят из двух телескопических стержней, концы которых могут скользить вдоль стоек портальных рам (30), позволяя устанавливать их или горизонтально, или под углом, меняя также высоту положения таких опор.
Передние опоры (33), изображенные только на фиг.8, также опираются своими концами на боковые портальные рамы (30).
Они могут состоять из отдельного узла (33), установленного таким образом, что он может скользить вдоль стоек портальной рамы (30) и содержит стержневую опору (34) с изменяемой угловой ориентацией.
Однако предпочтительным и изображенным на фиг.8 является использование ряда передних опор (34), расположенных на различных уровнях на стойках передней рамы (30), а захваты для рук (34) предварительно ориентируются относительно пациента, проходящего курс лечения.
И, наконец, верхняя поперечина (35) может позволить прикрепить к ней средство, допускающее выполнение вытяжения вдоль оси тела.
В некоторых случаях, когда возникает потребность размещения пациента на платформе в очень специфическом положении, существует возможность, как показано на фиг. 9, снабдить платформу ремнем (36), который, в свою очередь, соединяется с каждой из боковых стоек портальных рам (30) стяжками (37), которые могут быть упругими или неупругими.
Два варианта реализации изобретения допускают действительное восстановление равновесия тела, и это осуществляется с использованием всех или части элементов, из которых они состоят.
А именно, устройство этого типа может работать только с использованием одной платформы или с использованием платформы с ручными опорами, в особенности боковыми ручными опорами, или же с использованием платформы, ручных опор и качающегося головодержателя для снятия нагрузок, причем пациент может стоять, находиться в согнутом положении или сидеть на сиденье, установленном на платформе.
Ниже приведены сведенные воедино различные режимы работы и полученные результаты.
ПРИМЕНЕНИЕ ОДНОЙ ПЛАТФОРМЫ
В этом случае с пациентом, стоящим на платформе вертикально, достигаются следующие результаты:
а) подъем и наклон платформы поднимает половину таза с одной стороны: вертикальная ось Z и одновременное опускание другой стороны, а также схождение и расхождение расположенных ниже позвоночных
сегментов в поперечной плоскости;
б) вращение платформы вызывает вращение и смещение вперед половины таза с одной стороны относительно поперечной оси Х и в то же время вращение и смещение
назад противоположной половины таза; и
в) наклон платформы ведет к изменению угла половины таза, вызывая боковое поступательное движение относительно сагиттальной оси Y.
Результатом этого комплексного движения скелета в трех направлениях является выполнение чередующихся и ритмических последовательностей сжатий и снятия напряжений во всех трех плоскостях в пространстве, которые воздействуют на суставы в целом и могут поэтому замедлить и стабилизировать, например, остаточные явления остеопороза, и добиться реабилитации суставов и хрящевого и дискового возмещения.
Сочетание движений такого типа способствует возникновению последовательности побуждений, подходящих для стимуляции.
Кроме того, так и позвоночный столб изменяют центр тяжести, уравновешивая таким образом давление позвонков на крестец и снимая подвздошное давление, что ведет к уменьшению какой-либо боли и улучшению походки.
ПРИМЕНЕНИЕ ПЛАТФОРМЫ И
БОКОВЫХ ОПОР
По сравнению с вариантом реализации, описанным выше, появляется возможность за счет предоставления опор для рук и выполнения этого на различной высоте добиться широкого
разнообразия положений фиксации части тела и локализации лопаточной части с распространением эффекта восстановления подвижности таза и несущей вес части на различных стадиях вдоль позвоночника и во
всех анатомических и механических положениях, оптимизируя таким образом восстановление подвижности таза и торса.
Боковые опоры позволяют также уменьшить или увеличить основные механические напряжения.
ПРИМЕНЕНИЕ ПЛАТФОРМЫ С БОКОВЫМИ ОПОРАМИ И С КАЧАЮЩИМСЯ ГОЛОВОДЕРЖАТЕЛЕМ ДЛЯ СНЯТИЯ НАГРУЗОК
Применение качающегося головодержателя для снятия нагрузок
(4), свободного во всех трех плоскостях пространства, позволяет удерживать голову вертикально или с небольшим снятием нагрузок, с тем, чтобы сопровождать движения, вызываемые платформой.
Это дает возможность обеспечить равновесие тела лиц, очень плохо ориентирующихся в пространстве, а также способствует расслаблению шейно-лопаточных мышц. Перед пациентом могут быть помещены визуальные метки, допускающие обращение к постуральному нарушению равновесия через визуальный постуральный ввод. В таком случае ручные опоры являются средством координации основных движений динамики и продвижения человека как пересекающейся последовательности движений плеч и тазового пояса.
ПРИМЕНЕНИЕ В СИДЯЧЕМ ПОЛОЖЕНИИ
Наряду с рассмотренными выше случаями применения, при
которых пациент находится в стоячем положении, существует возможность применения такого устройства с пациентом, находящимся в сидячем положении. В этом случае на платформе будет установлено сиденье
без спинки, которое может быть ориентировано под углом 90o относительно каждой стороны горизонтальной плоскости и наклонено на 5-30o вверх и вниз относительно вертикальной
оси.
Усовершенствование такого типа позволяет выбрать выполнение процесса постуральной реабилитации в сидячем положении, в особенности, в случае лиц с травмами нижних конечностей. Это позволяет также выполнять работу с позвоночным столбом избирательно в пределах указанной системы координат и дает возможность раскрывать пространство между отростками позвонков, характеризующее каждое соединение позвоночника, причем этот позвоночник со своими тремя отростками является фундаментальным элементом и базовой единицей позвоночного столба.
При таком применении существует возможность регулирования множества параметров, а именно: регулирования высоты, амплитуды вращения, наклона сиденья вперед и назад, положения, в котором находятся передние конечности и, возможно, применение эталонного головодержателя.
Устройство, подобное этому, имеющее особенно простую конструкцию, может быть использовано не только для реабилитации, но и для подготовки и уравновешивания скелета для проведения курса терапии позвоночника, хеиропрактики, остеопатии и т.п., до и после сеансов с целью закрепления результатов.
Возможно также его применение в области спорта в качестве тренажера.
Реферат
Изобретение касается устройства, предназначенного для восстановления равновесия человеческого тела и состоящего в основном из платформы 2, служащей опорой пациенту, проходящего курс лечения, и способной приводиться в действие с колебательным движением. Изобретение отличается тем, что указанная платформа имеет силовой привод и воспринимает свое колебательное движение вокруг центральной опорной оси 6 и движение, связанное с вращательным возвратно-поступательньм движением, причем амплитуда и скорость как колебаний, так и вращения могут регулироваться и могут варьироваться в процессе применения устройства. 8 з.п. ф-лы, 9 ил.
Комментарии