Механизм наведения на солнце - RU2145692C1
Код документа: RU2145692C1
Чертежи

Описание
Предметом изобретения является механизм наведения на солнце, то есть механизм, который двигает устройства прикладной солнечной техники (в дальнейшем - солнечные преобразователи) в зависимости от положения солнца.
Известны системы, состоящие из нескольких механизмов наведения на солнце (механизмов наведения), гидравлические исполнительные органы которых приводятся в движение от общего источника давления. Каждый механизм наведения должен при этом управляться автономно, что может быть реализовано только с помощью сложной и дорогостоящей системы управления. К тому же подобный механизм потребляет много энергии (см. DЕ 2715334). Известны также гидравлические механизмы наведения с противовесом, который при опускании солнечного преобразователя поднимается и аккумулирует при этом энергию, которая затем используется для последующего поднятия солнечного преобразователя. Подобный противовес обеспечивает экономичный привод, но в то же время ведет к дополнительному удорожанию конструкции.
Целью изобретения является устранение вышеуказанных недостатков.
Указанная цель, предоставить простое управление для систем, состоящих из нескольких механизмов наведения, достигается в принципе тем, что исполнительные органы двух механизмов наведения связаны друг с другом гидравлически таким образом, что достаточно двигать только один солнечный преобразователь в соответствии с перемещением солнца, чтобы другой солнечный преобразователь двигался тоже в соответствии с перемещением солнца, причем без применения какого-либо дополнительного управления. Указанные два механизма наведения могут быть частью системы, состоящей из нескольких механизмов наведения. Если солнечный преобразователь и/или части с изменяющимся по высоте положением одного из этих механизмов наведения использовать в качестве аккумулирующего энергию противовеса, то получится установка, состоящая из двух механизмов наведения, с минимальным потреблением энергии, что дает, особенно в случае тяжелых солнечных преобразователей, значительные преимущества. Исполнительные органы могут быть реализованы с помощью поворотных гидромоторов или цилиндров. Различного рода улучшения и специальные исполнения описаны в дополнительных пунктах формулы изобретения.
2 К
описанию изобретения приведены следующие эскизы:
фиг. 1 - установка, состоящая из двух одноосных механизмов наведения на солнце,
фиг. 2 - установка, состоящая из двух двухосных
механизмов наведения на солнце,
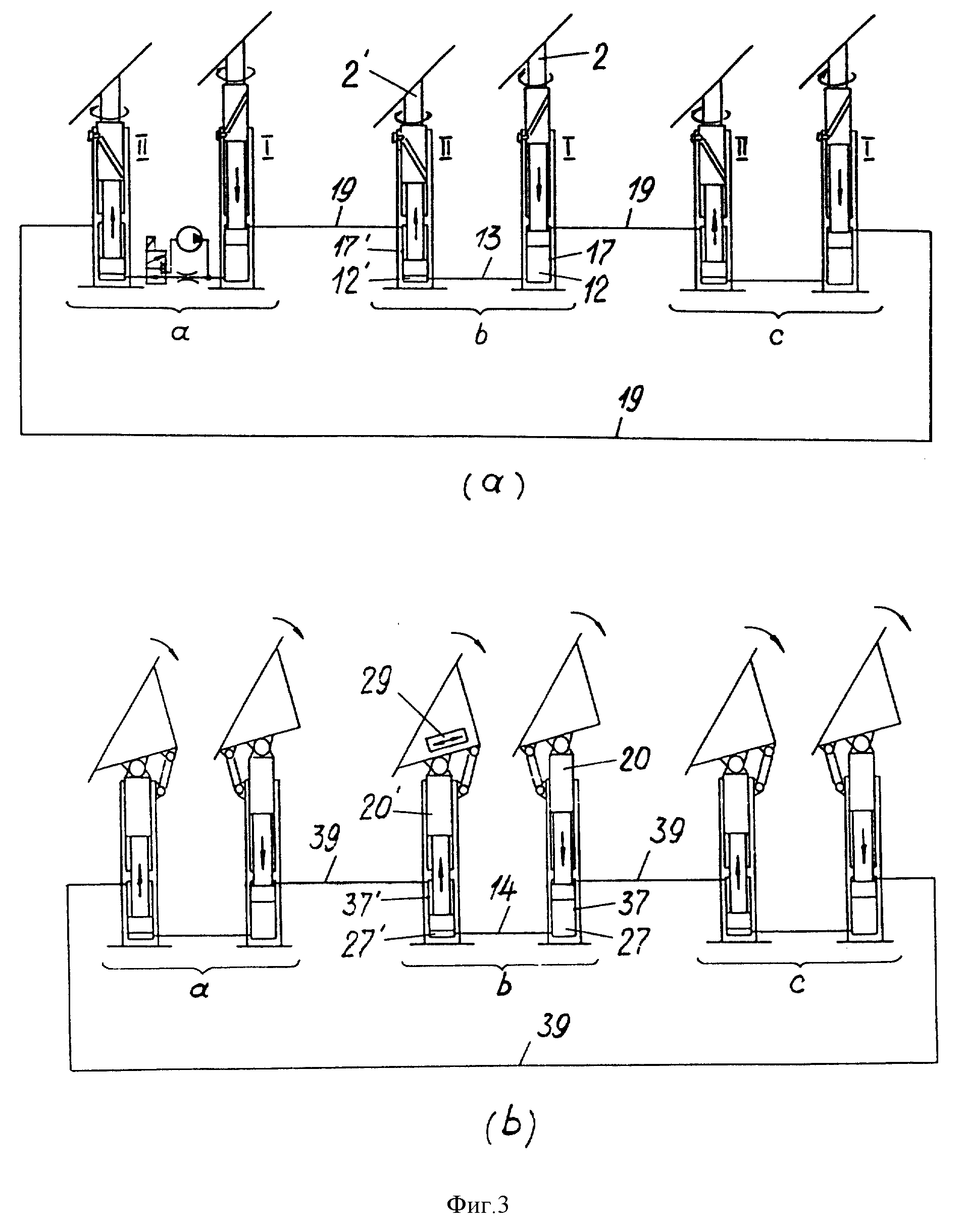
фиг.3 - система, состоящая из нескольких установок.
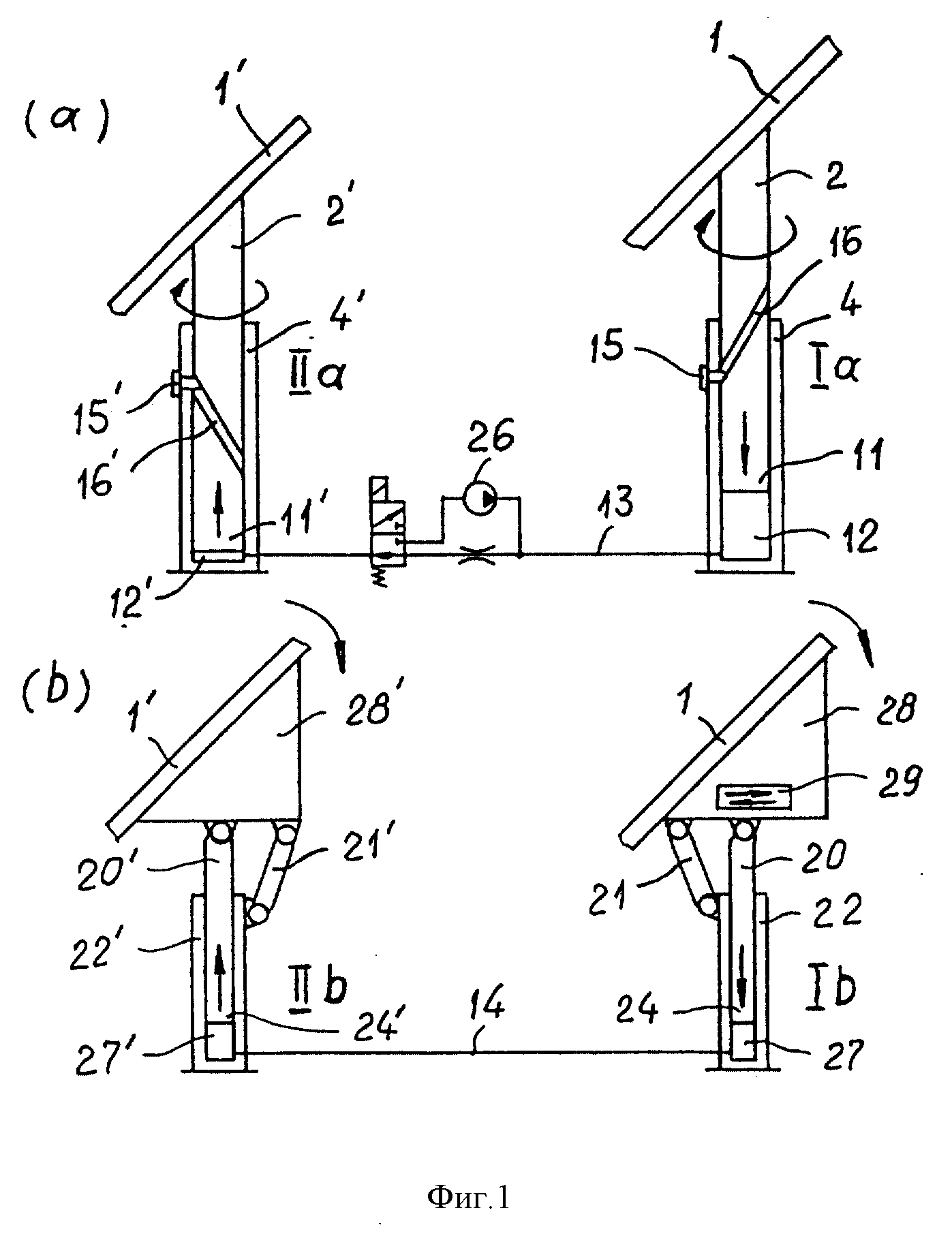
На фиг. 1a и 1b показаны соответственно по одному механизму наведения (Ia, Ib), который имеет опору (2, 20), перемещающуюся в направляющей трубе (4, 22). Опора (2, 20) несет сверху солнечный преобразователь, опирается снизу на гидравлический цилиндр одностороннего действия (12, 27) и, аналогично гидравлическим весам, через гидравлическую силовую передачу, состоящую из гидравлического цилиндра одностороннего действия (12, 27), гидропровода (13, 14) и второго гидравлического цилиндра одностороннего действия (12', 27'), соединена с противовесом, который действует как накопитель энергии. Причем вместо гидравлической силовой передачи возможно также применение механической силовой передачи. В качестве противовеса служат солнечный преобразователь и части с изменяющимся по высоте положением второго аналогичного механизма наведения (IIa, IIb). Механизмы наведения связаны друг с другом таким образом, что при опускании опоры (2, 2', 20, 20') одного из механизмов наведения опора другого механизма наведения одновременно поднимается, при этом направления вращения обеих солнечных преобразователей совпадают. В механизмах наведения, имеющих преимущественно вертикальную ось вращения (см. фиг. 1а), совпадение направления вращения обоих солнечных преобразователей достигается с помощью друг относительно друга противоположно направленных винтовых направляющих (16 и 16') (на эскизе - винтовые пазы (16, 16') с ведущими пальцами (15, 15')), которые преобразуют поступательное движение опоры в соответствующее вращательное движение. В механизмах наведения, имеющих преимущественно горизонтальную осью вращения (см. фиг. 1b), сопадение направления вращения обоих солнечных преобразователей достигается посредством действия штанг (21, 21'), которые одним концом шарнирно соединены с несущей конструкцией (28, 28') солнечного преобразователя, причем эти шарнирные соединения расположены с разных сторон относительно точек соединения опор (20, 20') с соответствующими несущими конструкциями (28, 28'). Другой конец штанги (21, 21') шарнирно соединен с направляющей (22, 22') или с другим фиксированным пунктом. В другом варианте исполнения направляющие трубы (22, 22') имеют шарнирное закрепление относительно поверхности земли, при этом штанги (21, 21') закреплены неподвижно; или направляющие трубы (22, 22') и штанги (21, 21') закреплены неподвижно, при этом опора (20, 20') и конструкция (28, 28') соединяются через дополнительную качающуюся штангу. Движение обоих солнечных преобразователей в одном направлении (например, в течение дня) происходит потому, что солнечный преобразователь и части с изменяющимся положением по высоте одного из механизмов наведения (Iа) (см. фиг. 1а) имеют несколько больший вес, чем те же элементы другого механизма наведения (IIа); движение обеих солнечных установок в другом направлении (например, ночью) осуществляется, например, с помощью насоса (26). Управление установки с горизонтальной осью вращения (см. фиг.1b) осуществляется, например, посредством перемещения только одного груза (29), который расположен на конструкции (28) механизма наведения (Ib) и снабжен, к примеру, электрическим приводом, другой механизм наведения (IIb) принудительно выполняет при этом правильное движение.
На фиг. 2 показаны два друг с другом связанных двухосных механизма наведения, которые представляют собой комбинацию из одноосных механизмов наведения, описанных под фиг.1a и фиг.1b. Внутренняя опора (20) передвигается внутри внешней опоры (2), которая в свою очередь перемещается в направляющей трубе (4). Каждый поршень (11, 11') привода внешней опоры имеет по периметру паз кольцевой формы (18, 18'), причем эти пазы соединены через гидропровод (14) друг с другом и через гидравлические соединения (25, 25') соответственно с цилиндрами (27, 27') привода внутренней опоры (20, 20'). Выше и ниже кольцевого зазора (18, 18'), длина которого не меньше хода опоры (2, 2'), находятся поршневые уплотнения (23). Таким образом, гидравлическое силовое соединение (12, 13, 12') опор (2, 2') и гидравлическое силовое соединение (27, 25, 18, 14, 18', 25', 27') опор (20, 20') являются независимыми друг относительно друга при любом положении опор. Штанги (21, 21') соединены шарнирно с конструкциями (28, 28') и с внешними опорами (2, 2') таким образом, чтобы направления вращения солнечных преобразователей совпадали.
На фиг. 3a или фиг. 3b показана система, состоящая из трех установок (а, b, с), причем каждая установка включает в себя два механизма наведения в соответствии с фиг. 1a или фиг. 1b. Привод опор (2, 2', 20, 20') осуществляется цилиндрами двухстороннего действия (17, 17', 37, 37'), расположенными снизу. Установки (a, b, с) соединены друг с другом через верхние полости указанных цилиндров, причем соответственно одна верхняя полость цилиндра механизма наведения (I), принадлежащая одной установке, соединена посредством гидропровода (19, 39) только с одной верхней полостью цилиндра механизма наведения (II), принадлежащей другому механизму наведения. Таким образом, управление целой группой механизмов наведения осуществляется посредством управления только одним механизмом наведения. В общем случае общий вес подвижных элементов всех механизмов наведения (I) (см. фиг. 3а) больше, чем общий вес подвижных элементов всех механизмов наведения (II).
Реферат
Устройство предназначено для обеспечения наведения на солнце преобразователей его энергии. Установка состоит из двух механизмов наведения на солнце, обеспечивающих перемещение преобразователей, при этом механизмы соединены друг с другом через гидравлическую или пневматическую прямую силовую передачу, причем при перемещении солнечного преобразователя, приводимого в движение одним из указанных механизмов наведения в соответствии с перемещением солнца, обеспечивается в соответствии с последним и перемещение другого преобразователя, приводимого в движение вторым механизмом. Устройство позволяет обеспечить экономичное и простое управление солнечными преобразователями. 2 с. и 11 з.п. ф-лы, 3 ил.
Формула
01.06.93 - по пп.1 - 7;
02.03.94 - по пп.8 - 11;
07.12.93 - по пп.12 и 13.
Комментарии