Формула
1. Система (10) очистки воздуха, включающая в себя:
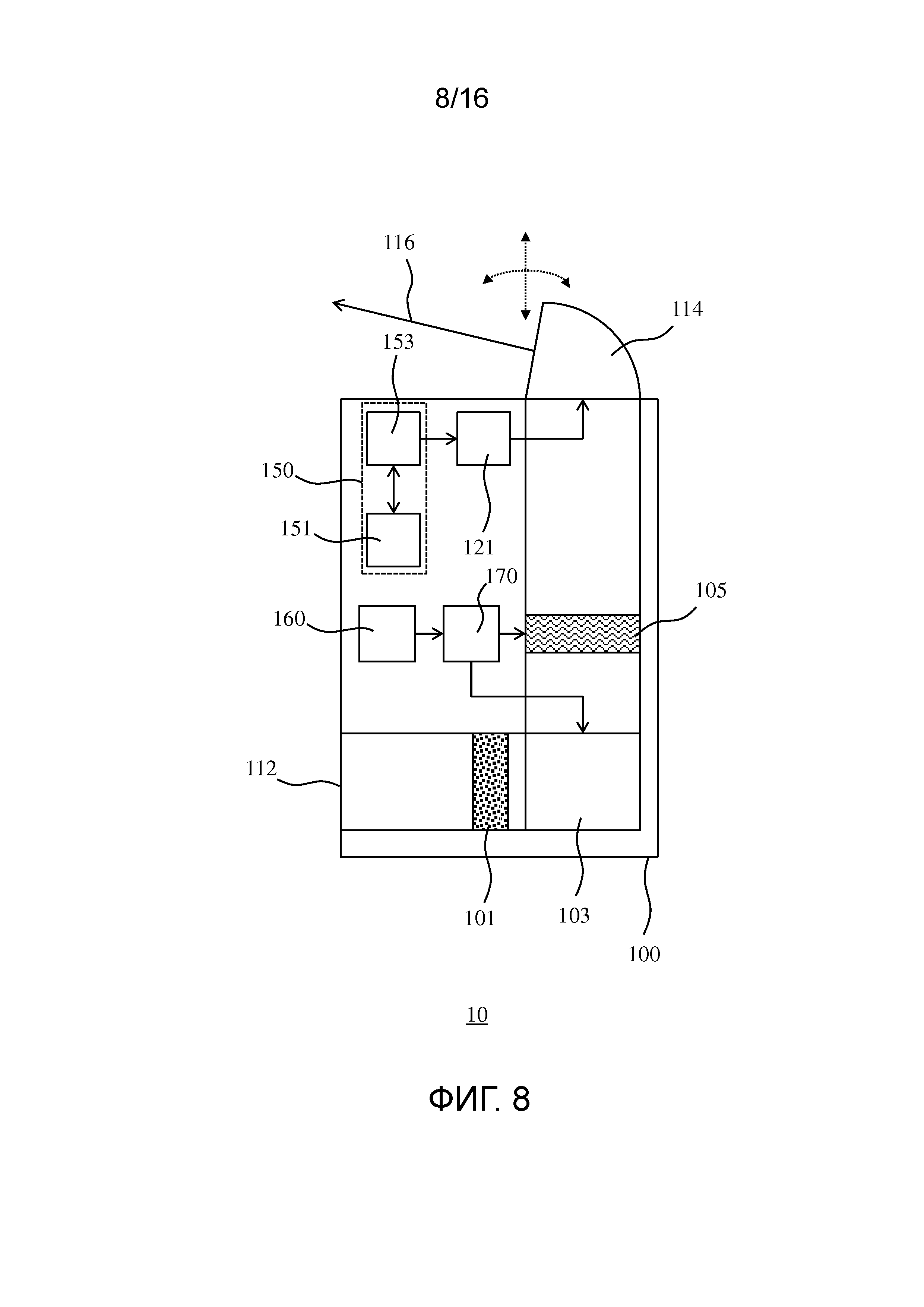
агрегат (100) для очистки воздуха, содержащий:
выпуск (114) воздуха, предназначенный для вытеснения воздуха в целевом направлении (116) в некоторую область и содержащий регулировочный механизм (121), выполненный с возможностью регулирования целевого направления в ответ на сигнал регулирования целевого направления, чтобы направить выпуск воздуха к лицу человека в упомянутой области;
по меньшей мере одну удаляющую загрязнения структуру (101) между впуском воздуха и выпуском воздуха и
агрегат (113) для перемещения воздуха, предназначенный для
перемещения воздуха от впуска воздуха к выпуску воздуха через упомянутую по меньшей мере одну удаляющую загрязнения структуру,
система (10) очистки воздуха дополнительно включает в себя датчик (160, 135), выполненный с возможностью определения параметра дыхания человека, причем агрегат для очистки воздуха выполнен с возможностью вытеснения воздуха в зависимости от параметра дыхания; и
датчик представляет собой датчик (160, 135) дыхания, а система очистки воздуха дополнительно содержит контроллер (153, 170), реагирующий на датчик дыхания, выполненный с возможностью по меньшей мере обнаружения фазы вдоха цикла дыхания человека в качестве параметра дыхания.
2. Система очистки воздуха по п.1, в которой контроллер выполнен с возможностью увеличения расхода воздуха, вытесняемого посредством выпуска (114) воздуха, в течение обнаруженной фазы вдоха цикла дыхания.
3. Система (10) очистки воздуха по п.2, дополнительно содержащая устройство (105) подачи вещества, реагирующее на контроллер (153, 170), причем контроллер выполнен с возможностью запуска высвобождения вещества устройством подачи вещества в воздух, вытесняемый выпуском (114) воздуха, в течение обнаруженной конкретной фазы цикла дыхания.
4. Система (10) очистки воздуха по п.2 или 3, в которой контроллер (153, 170) выполнен с возможностью увеличения расхода воздуха, вырабатываемого агрегатом (103) для перемещения воздуха, и/или регулирования диаметра выпуска (114) для воздуха в течение обнаруженной фазы вдоха цикла дыхания.
5. Система (10) очистки воздуха по п.1, дополнительно содержащая всасывающее устройство (130), включающее в себя:
всасывающее отверстие (131), выполненное с возможностью захвата воздуха, выдыхаемого человеком, причем всасывающее отверстие включает в себя всасывающее устройство (133) и по меньшей мере один датчик, включая датчик (135), выполненный с возможностью определения параметра дыхания человека во всасывающем отверстии, причем упомянутый по меньшей мере один датчик выполнен с возможностью мониторинга анализируемого вещества, представляющего интерес, в выдыхаемом воздухе; и
устройство (137, 153) мониторинга, выполненное с возможностью мониторинга показателей жизнедеятельности человека исходя из данных датчика, выдаваемых упомянутым по меньшей мере одним датчиком, в качестве параметра дыхания, причем агрегат для очистки воздуха выполнен с возможностью вытеснения воздуха в зависимости от показателей жизнедеятельности, контролируемых устройством мониторинга.
6. Система (10) очистки воздуха по п.5, в которой упомянутый по меньшей мере один датчик (135) представляет собой по меньшей мере один из: датчика O2, датчика CO2, датчика относительной влажности и датчика температуры газа.
7. Система (10) очистки воздуха по п.5 или 6, в которой контроллер (153, 170) выполнен с возможностью запуска генерирования потока воздуха, направляемого человеку, во время мониторинга показателей жизнедеятельности с помощью устройства (135, 153) мониторинга.
8. Система (10) очистки воздуха по п.5 или 6, в которой всасывающее устройство (130) дополнительно содержит направляющую поверхность (132), проходящую от всасывающего отверстия (130),
причем контроллер (170) выполнен с возможностью запуска генерирования потока воздуха, направляемого к направляющей поверхности, во время мониторинга показателей жизнедеятельности с помощью устройства (135, 153) мониторинга.
9. Система (10) очистки воздуха по п.1 или 5, в которой ориентация выпуска (114) для воздуха является регулируемой посредством регулировочного механизма или ориентация всего агрегата (100) для очистки воздуха является регулируемой посредством регулировочного механизма.
10. Система (10) очистки воздуха по п.1 или 5, дополнительно включающая в себя систему (150) управления, содержащую:
средство обнаружения присутствия, включающее в себя устройство (151) захвата изображения, выполненное с возможностью захвата изображения (1) упомянутой области; и
средство (153) обработки, выполненное с возможностью:
обрабатывать изображение, захватываемое устройством захвата изображения, чтобы распознать лицо (5) в упомянутом изображении и определить положение лица в упомянутой области; и
генерировать сигнал регулирования целевого направления на основе определяемого положения лица в упомянутой области.
11. Система (10) очистки воздуха по п.10, в которой:
устройство (151) захвата изображения выполнено с возможностью захвата последовательности изображений упомянутой области;
средство (153) обработки выполнено с возможностью обновления сигнала регулирования целевого направления в соответствии с изменением положения лица в упомянутой области, обнаруживаемым из упомянутой последовательности.
12. Система (10) очистки воздуха по п.10 или 11, в которой:
устройство (151) захвата изображения установлено на выпуске (114) воздуха или в непосредственной близости к нему.
13. Система (10) очистки воздуха по п.10, дополнительно содержащая устройство (157) пользовательского ввода, причем средство обработки также выполнено с возможностью:
систематически изменять сигнал регулирования целевого направления до тех пор, пока не произойдет прием пользовательского ввода, поступающего из устройства пользовательского ввода и характеризующего упомянутый воздух, вытесняемый в целевом направлении (116);
запускать устройство (151) захвата изображения с целью захвата изображения (1) области в ответ на принятый пользовательский ввод;
обрабатывать изображение, захваченное устройством захвата изображения, с целью распознавания лица на упомянутом изображении и определения положения лица в упомянутой области; и
коррелировать целевое направление с определяемым положением.
14. Машиночитаемый носитель информации, содержащий машиночитаемые команды программы, реализованные для того, чтобы при исполнении их на средстве (153) обработки, входящем в состав системы (150) управления для системы (10) очистки воздуха по п.1 или 5, заставлять средство обработки:
запускать устройство (151) захвата изображения системы управления с целью захвата (203) изображения (1) области, в которую выпуск (114) воздуха агрегата (100) для очистки воздуха способен вытеснять воздух в целевом направлении (116);
обрабатывать (205) изображение, захваченное устройством захвата изображения, чтобы распознать лицо (1) человека на упомянутом изображении и определить положение лица в упомянутой области;
запускать датчик для определения параметра дыхания человека;
генерировать (207) сигнал регулирования целевого направления на основе определяемого положения лица в упомянутой области;
генерировать сигнал управления генерированием потока воздуха на основе определяемого параметра дыхания; и
передавать генерируемый сигнал регулирования целевого направления и генерируемый сигнал управления генерированием потока воздуха в агрегат для очистки воздуха с целью управления целевым направлением выпуска воздуха и соответственного вытеснения чистого воздуха через выпуск воздуха.
15. Машиночитаемый носитель информации по п.14, дополнительно содержащий машиночитаемые команды программы, реализованные для того, чтобы при исполнении их на упомянутом средстве обработки заставлять средство обработки:
запускать устройство (151) захвата изображения с целью захвата (203) последовательности изображений (1) упомянутой области и
обновлять (207) сигнал регулирования целевого направления в соответствии с изменением положения лица (1) в упомянутой области, обнаруживаемым из упомянутой последовательности.















Комментарии