Способ и устройство для отделения литой линзы от оболочечной формы - RU2364507C2
Код документа: RU2364507C2
Чертежи






Описание
Изобретение касается способа отделения литой линзы от оболочечной формы, согласно ограничительной части п.1 формулы изобретения, и предназначенного для этого устройства.
Из международной заявки на патент WO 02/087861 известна поточная линия производства оптических линз. При этом способе изготовления мономер заливается в полость, ограниченную двумя оболочечными формами и уплотнением, и полимеризуется, за счет чего образуется линза. Затем уплотнение удаляется и линза в разделительном устройстве отделяется от обеих оболочечных форм. Обе оболочечных формы по очереди отделяются от линзы. Разделительное устройство состоит из крепления, которое укрепляет линзу, одного источника силы, который оказывает силовое воздействие на линзу преимущественно в месте раздела между линзой и оболочечной формой, и второго источника силы, который оказывает силовое воздействие на оболочечную форму.
Отделение линзы от обеих оболочечных форм - это деликатный процесс, при котором существует значительный риск, что линзы и/или оболочечные формы в процессе разделения повреждаются или разрушаются. По этой причине разделение происходит все еще вручную, и способ разделения по заявке WO 02/087861 оказался непригодным. В документе US 4251474 упомянут шпатель, который используется для разделения линзы и оболочечной формы.
Предмет изобретения
В основе изобретения лежит задача - разработать способ и устройство, которое делает возможным отделение линзы от обеих оболочечных форм без повреждения линзы или оболочечных форм.
Упомянутая задача решается согласно изобретению посредством отличительных признаков п.1, 6 и 11 формулы изобретения.
Обе оболочечные формы обозначаются, в общем, как задняя и передняя оболочечные формы. Однако в этом способе неважно, какая из обеих оболочечных форм обозначена как задняя и какая как передняя оболочечная форма. Обращенная к линзе сторона оболочечной формы будет обозначаться как активная сторона, а противолежащая линзе сторона - как пассивная.
Для отделения линзы от обеих оболочечных форм предлагается способ, в котором разделительный инструмент с усилием проводится по линзе вдоль места разделения между линзой и отделяемой от линзы оболочечной формы. Разделительный инструмент выполнен предпочтительно тупым и прокатывается по линзе, по возможности без того, чтобы скользить или тереться по линзе. Это зависит только от относительных движений:
- может перемещаться либо разделительный инструмент, либо комплекс из линзы и оболочечной формы по отношению к положению места разделения;
- разделительным инструментом при разделительном процессе нажимает с предварительно определенной силой на линзу, или линзой нажимают с предварительно определенной силой на разделительный инструмент;
- либо поворачивается комплекс из линзы и оболочечной формы и разделительный инструмент пассивно прокатывается по линзе, либо поворачивается разделительный инструмент, а линза пассивно прокатывается по разделительному инструменту.
Разделительный процесс происходит предпочтительно в то время как посредством захвата прикладывается сила тяги к пассивной стороне передней оболочечной формы, поскольку ее нужно отделять, или соответственно - к линзе, если нужно отделять линзу от задней оболочечной формы. Тем не менее, при определенных линзах может требоваться, чтобы в начале разделительного процесса захватом первоначально производилась сила давления на оболочечную форму и соответственно линзу, и только в ходе разделительного процесса, но прежде, чем линза и отделяемая оболочечная форма полностью отделены друг от друга, сила давления снижается и производится сила тяги. Сила тяги и сила давления могут прикладываться во время разделительного процесса также попеременно согласно определенному профилю, чтобы поддерживать разделительный процесс.
Кроме того, захват может производить дополнительно или вместо силы тяги и силы давления, срезывающее усилие, т.е. направленную сбоку силу на оболочечную форму и/или линзу.
Устройство, особенно подходящее для реализации способа, охватывает поворачивающийся вокруг первой поворотной оси, приводимый в действие от первого двигателя держатель, который закрепляет заднюю оболочечную форму, захват, преимущественно вакуумный захват, который прикладывает силу тяги к передней оболочечной форме или после ее удаления - к линзе, поворачивающийся вокруг второй оси разделительный инструмент, который прижимают посредством источника силы сбоку к линзе, второй двигатель для изменения измеренной вдоль первой поворотной оси высоты H разделительного инструмента, и управляющее устройство, управляющее вторым двигателем таким образом, что высота H разделительного инструмента следует за местом раздела между отделяемой оболочечной формой и линзой, при этом тем не менее он нажимает на линзу, а не на отделяемую оболочечную форму.
Положение поворота оболочечной формы характеризуется углом поворота Θ. Оболочечная формы имеет маркировку для угла поворота Θ=0°. Прежде чем может проводиться разделительный процесс, должны быть известны положение поворота отделяемой оболочечной формы и высота места раздела между отделяемой оболочечной формой и линзой как функции угла поворота Θ. Кроме того, должна быть известна азимутальная позиция ΘS разделительного инструмента.
Обращенная к месту раздела кромка оболочечной формы математически определена функцией R(Θ), которая описывает положение кромки относительно исходного положения оболочечной формы в функции угла поворота Θ. Функция R(Θ) либо определяется для каждой оболочечной формы измерением и сохраняется в доступной управляющему устройству памяти, либо регистрируется посредством сенсора во время процесса разделения.
Расположение Hv(Θ) места раздела между передней оболочечной формой и линзой получается как Hv(Θ) = H1 - Rv(Θ), причем высота H1 обозначает высоту исходного положения передней оболочечной формы, если комплекс из линзы и обеих оболочечных форм зафиксирован на держателе, а функция Rv(Θ) обозначает отнесенную к передней оболочечной форме функцию R(Θ). Расположение места раздела Hh(Θ) между задней оболочечной формой и линзой получается как Hh(Θ)=H2+Rh(Θ), причем высота H2 обозначает высоту исходного положения задней оболочечной формы, если комплекс зафиксирован на держателе, а функция Rh(Θ) обозначает отнесенную к задней оболочечной форме функцию R(Θ). Высота H1 должна устанавливаться измерением перед процессом разделения, так как линза при отверждении испытывает определенную усадку, если только линза не состоит из материала, который не сокращается при отверждении. Высота H2, как правило, постоянна и поэтому должна определяться только однажды при калибровке разделительного устройства.
Место раздела между отделяемой оболочечной формой и линзой характеризуется математической функцией без расширения, в то время как разделительный инструмент обнаруживает конечную толщину и соответственно расширение. При отделении передней оболочечной формы от линзы высота разделительного инструмента в функции угла поворота Θ регулируется на высоту Hv(Θ)-ΔH0, причем константа ΔH0 обозначает сопряженную с толщиной разделительного инструмента величину смещения. Константа ΔH0составляет, например, 0,3 мм. При отделении задней оболочечной формы от линзы высота разделительного инструмента в функции угла поворота Θ регулируется на высоту Hv(Θ)+ΔH0. Таким образом в обоих случаях гарантировано, что разделительный инструмент каждый раз рядом с местом раздела между отделяемой оболочечной формой и линзой нажимает на линзу и следует за местом раздела, однако разделительный инструмент не нажимает на оболочечную форму.
Имеются линзы, которые имеют уплощение. Уплощение может происходить, например, от разливки. Чтобы избегать повреждения при таких линзах, производимое разделительным инструментом усилие сокращается преимущественно до нулевого значения, если уплощение находится в области разделительного инструмента.
Разделительный процесс может поддерживаться подводом разделительного средства, если бы оно было в форме жидкости, например мыльного раствора, газа или порошка, или смеси из них. Кроме того, разделительное средство может быть холодным, чтобы вызывать охлаждение линзы. Альтернативно, разделительное средство может быть горячим, чтобы поддерживать разделительный процесс.
Произведенное разделительным инструментом на линзу усилие может быть направлено ортогонально на боковую стенку линзы или направлено под постоянным или варьируемым углом, зависимым от угла поворота Θ.
Изобретение разъясняется в последующем подробнее посредством примера изготовления и посредством чертежей.
Краткое описание чертежей
Фиг.1 показывает вид сбоку устройства для отделения литой линзы от передней и задней оболочечной формы,
Фиг.2, 3 - вид сбоку и соответственно в разрезе части устройства,
Фиг.4 - вид линзы сверху,
Фиг.5-7 - различные профили силы, и
Фиг.8, 9 - другие устройства для отделения литой линзы от оболочечных форм.
Фиг.1 показывает устройство для отделения литой линзы 1 от передней оболочечной формы 2 и задней оболочечной формы 3 схематически и при виде сбоку. Обе оболочечных формы 2, 3 и линза 1 представляют собой комплекс 4. Устройство содержит держатель 7, поворачивающийся вокруг первой поворотной оси 5 и приводимый в действие от первого 6 двигателя, который закрепляет заднюю оболочечную форму 3 комплекса 4, преимущественно выполненный как вакуумный присасывающий захват 8, который производит на переднюю оболочечную форму 2 и соответственно после ее удаления - на линзу 1 усилие, силу давления или силу тяги, разделительный инструмент 9, на который нажимают посредством источника силы 10 сбоку на линзу 1, второй двигатель 11, чтобы переставлять измеренную вдоль первой поворотной оси 5 высоту H разделительного инструмента 9, и управляющее устройство 12, которое управляет вторым двигателем 11 в зависимости от угла поворота Θ отделяемой оболочечной формы так, что разделительный инструмент 9 всегда непосредственно рядом с местом 13 раздела между отделяемой оболочечной формой 2 и соответственно 3 и линзой 1 нажимает на линзу 1, т.е. так, что высота H разделительного инструмента 9 следует высоте места 13 раздела. Устройство включает факультативно один или несколько роликов 14 противодавления, которые противодействуют произведенному разделительным инструментом 9 усилию. Если имеются в наличии два ролика 14 противодавления, то они расположены симметрично в отношении направления силы, которую производит разделительный инструмент 9 на линзу 1.
Захват 8 смонтирован на автоматическом манипуляторе 15, а именно - преимущественно посредством пружины 16. Захват 8 смонтирован, кроме того, с возможностью поворота вокруг второй поворотной оси 17, чтобы захват 8 мог поворачиваться совместно с передней оболочечной формой 2, если первый двигатель 6 поворачивает держатель 7 с комплексом 4 вокруг первой поворотной оси 5. Поворотная ось 17 в идеальном случае совпадает с поворотной осью 5. Так как это, однако, не может точно достигаться из-за неизбежных допусков, захват 8 смонтирован на автоматическом манипуляторе 15 с определенной радиальной игрой. Вместо монтажа посредством пружины 16 также мог бы быть предусмотрен пневматический монтаж захвата 8 на автоматическом манипуляторе 15. При этом решении производимое захватом 8 усилие может регулироваться пневматически.
Силовой источник 10 преимущественно является пневматически управляемым посредством двух нагнетательных камер 18, 19 поршнем 20. Давление в первой нагнетательной камере 18 является, например, постоянным, а давление во второй нагнетательной камере 19 управляется клапаном. Разница господствующих в обеих нагнетательных камерах 18, 19 давлений определяет производимое поршнем 20 усилие.
Максимальное отклонение силового источника 10 ограничивается упором для обеспечения того, что при разделительном процессе, если линза 1 и оболочечная форма деформируются и возникает щель между линзой 1 и отделяемой оболочечной формой 2 или 3, разделительный инструмент 9 не приходит в контакт с отделяемой оболочечной формой, так как иначе оболочечная форма могла бы повреждаться.
Фиг.2 показывает держатель 7, захват 8 и разделительный инструмент 9 при виде сбоку, фиг.3 показывает те же самые части в разрезе. На фиг.2 виден ход обоих мест 13 раздела. Пунктирной линией 21 и соответственно 22 представлена кривая, по которой проводится разделительный инструмент 9.
Держатель 7 содержит направляющую 23 (фиг.3), на которой лежит пассивная сторона 24 задней оболочечной формы 3, и деформируемый элемент 25 уплотнения, который уплотняет полость 26, образованную между держателем 7 и задней оболочечной формой 3.
Передняя и задняя оболочечные формы 2 и соответственно 3 содержат по одной маркировке 28 (так называемая ТАБО-схема, фиг.2), которая служит как рекомендация для угла поворота, например, характеризует угол поворота Θ=0°. Пассивная сторона оболочечной формы 2, 3 является, как правило, шаровой поверхностью 29 (фиг.3), которая переходит на краю в ровный участок площади 30. Этот ровный участок площади 30 плохо подходит как исходная поверхность для функции R(Θ), которая характеризует высоту кромки активной стороны оболочечной формы. Поэтому расчет и определение функции R(Θ) предпочтительно происходит по отношению к шаровой поверхности 29, и разъясняется подробнее на примере задней оболочечной формы 3, но подходит, равным образом, для передней оболочечной формы 2. Задняя оболочечная форма 3 располагается на направляющей 23 держателя 7. Направляющая 23 - это тор, величина которого рассчитана так, что шаровая поверхность пассивной стороны 24 в области ее кромки накладывается на направляющую 23. При этом оболочечная форма располагается на держателе 7 таким образом, что она центрирована по возможности наиболее симметрично в отношении поворотной оси 5. Теперь держатель 7 поворачивается, до тех пор пока маркировка 28 не занимает предназначенного положения. Держатель 7 поворачивается теперь один раз на 360° и при этом измеряется высота кромки 31 активной стороны 32 посредством сенсора как функция угла поворота Θ и сохраняется как функция R(Θ). Это измерение должно проводиться только единожды. Оно происходит предпочтительно на отдельной измерительной станции, которая содержит такой же держатель, как держатель 7. Другая возможность состоит в том, чтобы помещать дополнительную маркировку 36 на кромке оболочечной формы, которая служит как рекомендация для функции R(Θ).
Разделительный инструмент 9 является предпочтительно вращающимся вокруг оси 33 диском, кромка которого выполнена тупой, чтобы диск не врезался в линзу 1. Кромка диска, например, имеет ширину примерно 0,5 мм. Ось 33 - это пассивная ось, так что кромка диска прокатывается по линзе 1 без скольжения или притирания, когда первый двигатель 6 поворачивает комплекс 4. Ось 33 разделительного инструмента 9 предпочтительно наклонена по отношению к поворотной оси 5 на предварительно заданный угол α, чтобы производимое разделительным инструментом 9 усилие на линзу 1 имело поддерживающую силу тяги захвата 8 компоненту. Сила тяги захвата 8 по определению направлена вдоль оси вращения 5 и в направлении, противоположном держателю 7.
Отделение линзы 1 от обеих оболочечных форм 2, 3 происходит согласно следующим технологическим шагам способа, которые описаны подробно.
1. Состоящий из обеих оболочечных форм 2, 3 и линзы 1 комплекс 4 размещается на держателе 7 и фиксируется на нем.
Комплекс 4 точно размещается автоматическим манипулятором 15 на направляющей 23 держателя 7, причем пассивная сторона 24 задней оболочечной формы 3 лежит на направляющей 23 держателя 7. Размещение происходит таким образом, что пассивная сторона центрируется по возможности наиболее симметрично к поворотной оси 5. При этом уплотнительный элемент 25 и/или сильфон 34, несущий уплотнительный элемент 25, деформируется. Теперь полость 26 вакуумируется, так что комплекс 4 будет зафиксирован на креплении 7.
2. Положение поворота комплекса 4 устанавливается так, что маркировка 28 передней оболочечной формы 2 занимает предназначенное положение поворота Θ=0°.
Теперь первый двигатель 6 поворачивает держатель 7 до того, как маркировка 28 передней оболочечной формы 2 занимает предназначенное положение поворота. Угол Θ=0° соответствует этому положению поворота. Для распознавания маркировки 28 имеется в наличии первый датчик (здесь не представлен).
Расположение Hv(Θ) места раздела между передней оболочечной формой 2 и линзой 1 зависит не только от передней оболочечной формы 2, но и от толщины линзы 1, т.е. от интервала между обеими оболочечными формами 2, 3. Если линза 1 при отверждении сокращается, то ход места раздела Hv(Θ) между передней оболочечной формой 2 и линзой 1 не может рассчитываться, а должен определяться измерением посредством второго (не представленного) сенсора. Если, напротив, линза 1 при отверждении не сокращается, то может рассчитываться ход места раздела Hv(Θ) между передней оболочечной формой 2 и линзой 1.
3. Определяется высота H1, которую занимает исходное положение пассивной стороны передней оболочечной формы 2.
Определение высоты H1 происходит посредством третьего сенсора 35 в форме траекторного сенсора. Траекторный сенсор является, например, микропереключателем, который опускается и замыкает электрический контакт, как только микропереключатель касается пассивной стороны передней оболочечной формы 2. Как только электрический контакт замыкается, микропереключатель передает его актуальную позицию как высоту H1 в управляющее устройство 12. Микропереключатель позиционирован так, что он регистрирует высоту H1 на том месте пассивной стороны передней оболочечной формы 2, на котором лежала пассивная сторона при определении функции R(Θ) на направляющей 23 держателя 7.
Если передняя оболочечная форма 2 снабжена маркировкой 36, то как высота H1 определяется высота маркировки 36. В этом случае третий сенсор 35 является оптическим датчиком, который расположен не поверх комплекса 4, а сбоку, рядом с комплексом 4.
Управляющее устройство 12 исполняет сопряженную с передней оболочечной формой 2 функцию R(Θ)=Rv(Θ) из доступной ему памяти, которая описывает интервал кромки передней оболочечной формы 2 от исходного положения на пассивной стороне в функции угла Θ. Ход места раздела 13 между передней оболочечной формой 2 и линзой 1 задан посредством Hv(Θ)=H1-Rv(Θ).
4. Разделительный инструмент 9 правильно позиционируют по высоте и нажимают им сбоку на линзу 1.
Теперь управляющее устройство 12 рассчитывает значение H(Θ=ΘS) и управляет вторым двигателем 11 таким образом, что разделительный инструмент 9 занимает высоту Hv(ΘS)-ΔH0, причем угол ΘS означает азимутальное положение разделительного инструмента 9 и константа ΔH0 означает соответствующую толщине разделительного инструмента 9 величину смещения. Затем к поршню 20 силового источника 10 прикладывается предварительно определенная разность давления так, что разделительный инструмент 9 теперь нажимает на линзу 1 непосредственно ниже места раздела 13 между передней оболочечной формой 2 и линзой 1.
5. Сила тяги прикладывается к передней оболочечной форме 2.
Автоматический манипулятор 15 приподнимается на предварительно заданную дистанцию. Так как теперь удерживаемый захватом 8 комплекс 4 зафиксирован на держателе 7, пружина 16 разгибается и захват 8 пркладывает определенную степенью растяжения пружины 16 и ее коэффициентом жесткости силу тяги к передней оболочечной форме 2.
Альтернативно, первоначально прикладывается сила давления на переднюю оболочечную форму 2. Однако сила давления станет сокращаться в ходе следующего технологического шага 6 - прежде чем линза 1 и отделяемые оболочечные формы (2, 3) полностью разделены друг с другом - и будет возрастать сила тяги.
Эти технологические шаги служили для подготовки. Теперь может проводиться собственно разделительный процесс для отделения передней оболочечной формы 2 от линзы 1. При этом нужно обращать внимание на то, что высота Hv(Θ) относится к линзе 1, причем угол Θ=0° соответствует расположению маркировки 28, однако разделительный инструмент 9 имеет азимутальный угол ΘS. Необходима трансформация угла, которая должна учитывать, кроме того, направление поворота держателя 7.
Если линза приблизительно кругла, то происходит собственно разделительный процесс, согласно следующему технологическому шагу способа.
6. Управляющее устройство 12 побуждает первый двигатель 6 к повороту и регулирует второй двигатель 11 таким образом, что высота HIst разделительного инструмента 9, соответственно актуальному углу Θ поворота передней оболочечной формы 2, занимает высоту Hv(ΘS-Θ)-ΔH0.
Управляющее устройство 12 и первый двигатель 6 известным способом работают совместно таким образом, что управляющему устройству 12 известен угол Θ поворота передней оболочечной формы 2.
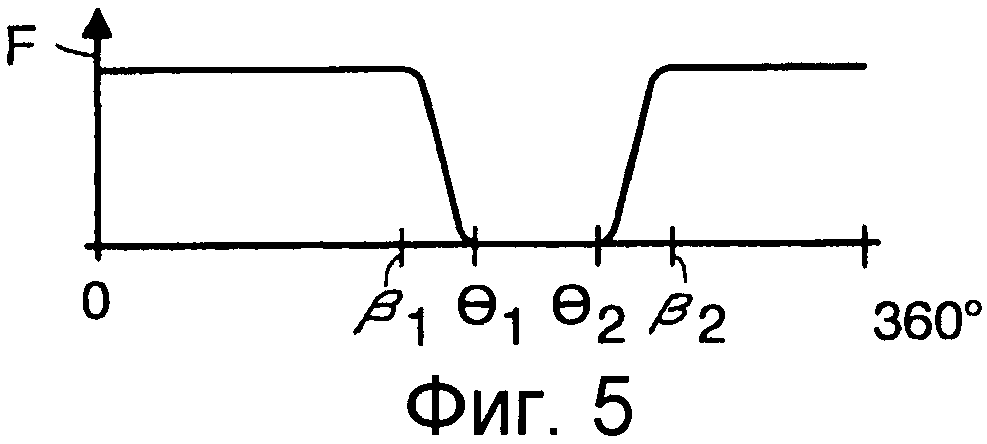
Фиг.4 показывает при виде сверху линзу 1 с уплощением 37. Кромка линзы 1 является круглой в широкой области угла φ и прямолинейной в пределах дополнительной угловой области 360°-φ. Этот прямой участок соответствует уплощению. Угол Θ1, при котором начинается прямой участок, и угол Θ2, при котором кончается прямой участок, собственно известны, однако не очень точно. Существует определенный риск в том, что передняя оболочечная форма 2 или линза 1 будут повреждаться на концах уплощения 37. Чтобы устранять этот риск, либо сильно сокращается произведенное силовым источником 10 усилие, предпочтительно до нулевого значения, либо даже разделительный инструмент 9 снимается с комплекса 4 каждый раз и до тех пор, пока уплощение 37 находится в области разделительного инструмента 9, т.е. для угла Θ1<Θ<Θ2 или для угла Θ1-δ<Θ<Θ2+δ, причем угол δ представляет собой небольшой угол допуска, который имеет расчетную погрешность, с которой известны углы Θ1 и Θ2.
Если линза содержит такое уплощение 37, то отделение происходит преимущественно согласно следующему технологическому шагу способа.
6'. Управляющее устройство 12 побуждает первый двигатель 6 к повороту и регулирует, во-первых, второй двигатель 11 таким образом, что высота HIst разделительного инструмента 9, соответственно актуальному углу Θ поворота передней оболочечной формы 2, занимает высоту Hv(ΘS-Θ)-ΔH0, и регулирует, во-вторых, произведенное силовым источником 10 усилие F, согласно предварительно заданному, зависимому от угла поворота Θ профилю F(ΘS-Θ).
Фиг.5 показывает первый пример силового профиля F(Θ). Угол поворота Θ простирается естественно на область от 0° до 360°. Сила F постоянна в диапазонах от 0° до Я1 и от Я2 до 360°, причем угол Я1<Θ1 и угол Я2>Θ2. В области от Я1 до Θ1 сила F сокращается до нулевой величины, в области от Θ2 до Я2 сила снова возрастает до постоянной величины.
Фиг.6 показывает второй пример силового профиля F(Θ), при котором приложенная сила на нескольких оборотах держателя 7 (представлены 3*360°) непрерывно возрастает.
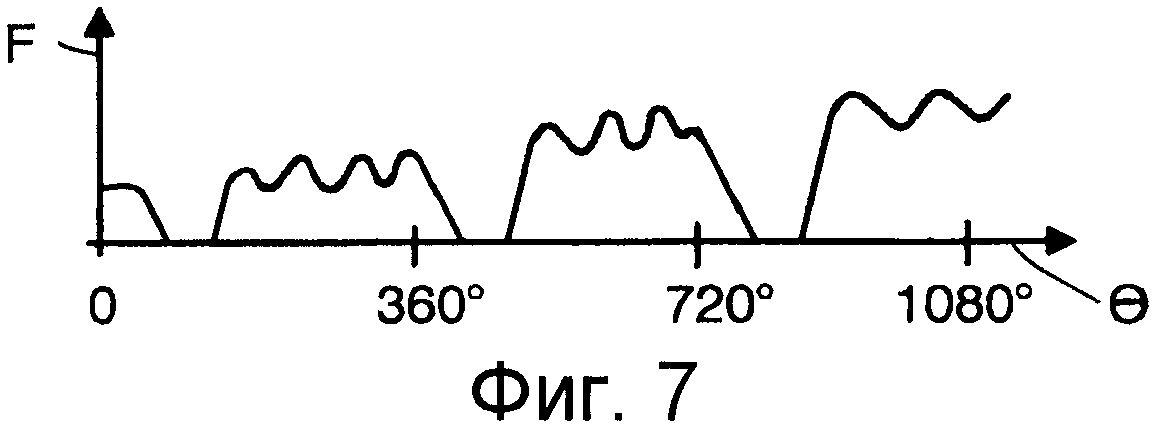
Фиг.7 показывает третий пример силового профиля F(Θ), при котором приложенная сила дополнительно содержит колебательную составляющую.
Когда разделительный процесс закончен, передняя оболочечная форма 2 снимается с линзы 1 вследствие произведенной захватом 8 силы тяги. Таким образом гарантировано, что линза 1 не может быть поцарапана, как только линза 1 и передняя оболочечная форма 2 отделены друг от друга. Как только датчик зарегистрирует этот подъем, управляющее устройство 12 останавливает первый двигатель 6 и сдвигает силовой источник 10 в его положение покоя, в котором разделительный инструмент 9 больше не касается комплекса 4. Автоматический манипулятор 15 помещает удаленную переднюю оболочечную форму 2 на конвейерную ленту.
Теперь аналогичным способом происходит отделение линзы 1 от задней оболочечной формы 3. Управляющее устройство 12 исполняет сопряженную с задней оболочечной формой 3 функцию R(Θ)=Rh(Θ) из памяти, которая описывает интервал кромки задней оболочечной формы 3 от ее пассивной стороны в функции угла Θ. Высота H2 задней оболочечной формы 3 определена высотой H2 направляющей 23 крепления 7 и не должна определяться каждый раз. Ход места раздела между задней оболочечной формой 3 и линзой 1 задан как Hh(Θ)=H2+Rh(0). Если задняя оболочечная форма 3, тем не менее, снабжена маркировкой 36, то как высота H2 определяется высота маркировки 36.
7. Положение поворота комплекса 4 устанавливается так, что маркировка 28 задней оболочечной формы 3 занимает предназначенное положение поворота Θ=0°.
8. Разделительный инструмент 9 позиционируется на высоту Hh(Θ=ΘS)+ΔH0 и прижимается к комплексу 4.
9. Захват 8 контактирует с линзой 1 и прикладывает усилие, как правило силу тяги, к линзе 1.
Теперь может проводиться собственно разделительный процесс для отделения линзы 1 от задней оболочечной формы 3.
10. Управляющее устройство 12 побуждает первый двигатель 6 к повороту и регулирует второй двигатель 11 таким образом, что высота HIst разделительного инструмента 9, соответственно актуальному углу Θ поворота задней оболочечной формы 3, занимает высоту Hh(ΘS-Θ)+ΔH0.
Или при линзах с уплощением 37
10'. Управляющее устройство 12 побуждает первый двигатель 6 к повороту и регулирует, во-первых, второй двигатель 11 таким образом, что высота HIst разделительного инструмента 9, соответственно актуальному углу Θ поворота задней оболочечной формы 3, занимает высоту Hh(ΘS-Θ)+ΔH0, и регулирует, во-вторых, произведенное силовым источником 10 усилие F, согласно предварительно заданному, зависимому от угла поворота Θ профилю F(ΘS-Θ).
Когда разделительный процесс закончен, линза 1 снимается с задней оболочечной формы 3 вследствие произведенной захватом 8 силы тяги. Как только датчик регистрирует это отслаивание, управляющее устройство 12 останавливает первый двигатель 6 и сдвигает силовой источник 10 в его положение покоя. Автоматический манипулятор 15 помещает линзу 1 и затем заднюю оболочечную форму 3 на конвейерную ленту.
Если разделительный процесс должен поддерживаться подводом разделительного средства, то рядом с разделительным инструментом 9 расположена форсунка, которая транспортирует разделительное средство на обрабатываемую разделительным инструментом 9 поверхность.
В примере величина ΔH0 была константой. Однако величина ΔH0может быть зависимой от угла поворота Θ величиной ΔH0(Θ). Таким образом, также может учитываться возрастающая во время разделительного процесса деформация отделяемой оболочечной формы.
Описанное устройство отличается простотой конструкции. Однако, поскольку это зависит только от относительного движения, когда разделительный инструмент должен следовать за местом 13 раздела между отделяемой оболочечной формой и линзой, высота разделительного инструмента 9 также могла бы быть поддержана постоянной, а высота держателя 7 быть подвижной. Кроме того, силовой источник 10 мог бы воздействовать на держатель 7 или на ролик 14 противодавления (а не на разделительный инструмент 9), чтобы производить 1 влияющее на линзу усилие от разделительного инструмента 9. Ход места раздела 13 может измеряться также во время разделительного процесса посредством сенсора, причем выходной сигнал сенсора обрабатывается управляющим устройством 12 и преобразуется в установочную команду для второго двигателя 11 разделительного инструмента 9.
При описанном устройстве первый двигатель 6 поворачивает держатель 7 и разделительный инструмент 9 поворачивается пассивно. Наоборот, первый двигатель 6 мог бы поворачивать разделительный инструмент 9 и пассивно поворачивать держатель 7.
Описанное устройство содержит два ролика 14 противодавления и единственный разделительный инструмент 9. Однако можно предусматривать больше, чем один разделительный инструмент, например два или три, и сокращать число роликов противодавления. При этом высота каждого разделительного инструмента регулируется управляющим устройством 12 в отдельности, соответственно его азимутальной позиции и углу поворота Θ отделяемой оболочечной формы 2 и соответственно 3.
Фиг.8 показывает следующее устройство, при котором разделительный инструмент 9 занимает твердую высоту и второй двигатель 11 может устанавливать высоту H держателя 7.
Фиг.9 показывает устройство, выполненное как непрерывная технологическая станция, для отделения литых линз от их оболочечных форм. Устройство содержит разделительный инструмент 9 с постоянной высотой H в форме прямого, преимущественно тупого лезвия 38 и несколько держателей 7 для размещения в каждом по одному полному комплексу 4 или комплексу 4, у которого одна оболочечная форма уже была отделена. Держатели 7 транспортируются линейным приводом 39 параллельно разделительному средству 38 в направлении, обозначенном x, причем линзы 1 прижимаются к разделительному средству 38 (или разделительное средство 38 к линзам 1), и прокатываются по разделительному средству 38. Высота H каждого держателя 7 регулируется посредством встроенного в держатель 7 двигателя 40 в отдельности. Управляющее устройство 12 управляет высотой H каждого отдельного держателя 7 индивидуально, так что высота каждого держателя 7, соответственно его актуальному углу поворота, следует за местом раздела между линзой 1 и отделяемой от линзы 1 оболочечной формой 2 или 3. К каждому держателю 7, кроме того, присоединен захват (не представлен), который производит силу тяги, силу давления и/или срезающее усилие на переднюю оболочечную форму 2 и соответственно на линзу 1. Робот передает комплекс 4 на держатель 7 на входной стороне устройства.
Здесь с иллюстративными целями представлялись и описывались предпочтительные в настоящее время примеры выполнения изобретения, но возможны многочисленные вариации и модификации, которые остаются в пределах концепции и области действия этого изобретения.
Здесь определенно еще раз указывается на то, что для формулы изобретения не играет никакой роли, какая из обеих оболочечных форм обозначается как задняя оболочечная форма и какая - как передняя оболочечная форма.
Реферат
Изобретение относится к способу и устройству отделения литой линзы от оболочечной формы. Способ отделения литой линзы от оболочечной формы заключается в том, что разделительный инструмент проводится с усилием по линзе вдоль места раздела между линзой и оболочечной формой, причем поворачивается комплекс из линзы и оболочечных форм и разделительный инструмент пассивно прокатывается по линзе, либо поворачивается разделительный инструмент и линза пассивно прокатывается по разделительному инструменту. Устройство для отделения отлитой линзы от обеих оболочечных форм содержит поворачивающийся вокруг первой поворотной оси держатель, причем положение поворота характеризуется углом поворота 9, поворачивающийся вокруг второй поворотной оси захват, силовой источник и разделительный инструмент, выполненный с возможностью вращения вокруг третьей оси и прижима сбоку к линзе; первый двигатель для поворота держателя или разделительного инструмента, второй двигатель для изменения измеренной вдоль первой поворотной оси высоты Н, управляющее устройство, управляющее вторым двигателем, причем высота Н разделительного инструмента и/или держателя следует за высотой места раздела между отделяемой оболочечной формой и линзой в зависимости от угла поворота 9. Изобретение делает возможным отделение линзы от обеих оболочечных форм без повреждения линзы или оболочечных форм. 3 н. и 8 з.п. ф-лы, 9 ил.
Формула
что разделительный инструмент (9) проводится с усилием по линзе (1) вдоль места раздела между линзой (1) и оболочечной формой (2, 3), причем поворачивается комплекс из линзы (1) и оболочечных форм (2, 3) и разделительный инструмент (9) пассивно прокатывается по линзе (1), либо поворачивается разделительный инструмент (9) и линза (1) пассивно прокатывается по разделительному инструменту (9).
что усилие регулируется согласно зависимому от угла поворота оболочечной формы (2, 3) профилю.
фиксирование состоящего из линзы (1) и одной или двух оболочечных форм (2, 3) комплекса (4) на поворачивающемся вокруг поворотной оси (5) держателе (7), причем угол поворота отделяемой оболочечной формы (2, 3) обозначен как угол поворота θ,
регулировка высоты разделительного инструмента (9) или держателя (7) и задействование разделительного инструмента (9) с усилием, так что разделительный инструмент (9) рядом с местом (13) раздела между отделяемой оболочечной формой (2, 3) и линзой (1) нажимает на линзу (1), и
вращение держателя (7), причем высота разделительного инструмента (9) или высота держателя (7) следует ходу высоты места (13) раздела, соответственно актуальному углу поворота θ.
фиксирование состоящего из линзы (1) и одной или двух оболочечных форм (2, 3) комплекса (4) на поворачивающемся вокруг поворотной оси (5) держателе (7), причем угол поворота отделяемой оболочечной формы (2, 3) обозначен как угол поворота θ,
регулировка высоты разделительного инструмента (9) или держателя (7) и задействование разделительного инструмента (9) с усилием, так что разделительный инструмент (9) рядом с местом (13) раздела между отделяемой оболочечной формой (2, 3) и линзой (1) нажимает на линзу (1), и
вращение держателя (7), причем высота разделительного инструмента (9) или высота держателя (7) следует ходу высоты места (13) раздела, соответственно актуальному углу поворота θ.
прикладывается дополнительная сила к передней оболочечной форме (2) и/или к линзе (1), если нужно отделять от линзы (1) заднюю оболочечную форму (3), и что дополнительная сила создается как сила тяги уже в начале разделительного процесса или, по меньшей мере, прежде, чем линза (1) и отделяемая оболочечная форма (2, 3) полностью отделены друг от друга.
поворачивающийся вокруг первой поворотной оси (5) держатель (7), на котором может фиксироваться задняя оболочечная форма (3), причем положение поворота отделяемой оболочечной формы (2, 3) характеризуется углом поворота θ,
поворачивающийся вокруг второй поворотной оси (17) захват (8) для приложения усилия к передней оболочечной форме (2) или после ее удаления, к линзе (1),
силовой источник (10) и разделительный инструмент (9), выполненный с возможностью вращения вокруг третьей оси (33) вращения и прижима посредством силового источника (10) сбоку к линзе (1),
первый двигатель (6) для поворота держателя (7) или разделительного инструмента (9),
второй двигатель (11) для изменения измеренной вдоль первой поворотной оси (5) высоты Н разделительного инструмента (9) или держателя (7),
управляющее устройство (12), управляющее вторым двигателем (11) так, что разделительный инструмент (9) нажимает на линзу (1) рядом с местом (13) раздела между отделяемой оболочечной формой (2, 3) и линзой (1), причем высота Н разделительного инструмента (9) и/или держателя (7) следует за высотой места (13) раздела между отделяемой оболочечной формой (2, 3) и линзой (1) в зависимости от угла поворота θ.
управляющее устройство (12) регулирует производимое силовым источником (10) усилие согласно зависимому от угла поворота θ профилю.
третья ось (33) вращения разделительного инструмента (9) наклонена по отношению к первой поворотной оси (5) на предварительно заданный угол (α).
третья ось (33) вращения разделительного инструмента (9) наклонена по отношению к первой поворотной оси (5) на предварительно заданный угол (α).
третья ось (33) вращения разделительного инструмента (9) может передвигаться по отношению к первой поворотной оси (5).
разделительный инструмент (9) с прямым разделительным средством (38),
несколько вращающихся вокруг оси держателей (7), на которых может фиксироваться задняя оболочечная форма (3), каждый с двигателем (40) для изменения высоты держателя (7) относительно разделительного средства (38),
линейный привод (39), который транспортирует держатели (7) параллельно разделительному средству (38), причем линзы (1) прокатываются по разделительному средству (38), и
управляющее устройство (12), которое индивидуально управляет двигателями (40) держателей (7) так, что высота линзы (1) следует за высотой места раздела между линзой (1) и отделяемой от линзы (1) оболочечной формой (2, 3).
Комментарии