Лазерная система мягкой стыковки для системы медицинской лучевой терапии - RU2230492C2
Код документа: RU2230492C2
Чертежи




Описание
Настоящее изобретение относится к области систем и способов управления положением медицинских систем лучевой терапии относительно аппликатора, в частности к лазерной системе мягкой стыковки для управления положением системы операционной электроннолучевой терапии относительно аппликатора.
Радиационное воздействие уже в течение долгого времени используется для лечения различных видов раковых опухолей путем непосредственной обработки злокачественной опухоли повышенной дозой радиации через операционную область. В самых ранних системах радиационного воздействия в качестве источника радиации использовался источник рентгеновского излучения. В более поздних системах оперативной лучевой терапии в качестве инструмента воздействия стали использоваться пучки высокоэнергетических электронов, которые обеспечивают равномерное распределение дозы излучения по обрабатываемой области с резким падением дозы за пределами указанной области, что минимизирует воздействие радиации на здоровые ткани.
В типичном варианте реализации процедуры оперативной электронно-лучевой терапии объем злокачественной опухоли удаляется таким образом, чтобы минимизировать остаточную область, подверженную болезни. Энергия электронов и размер обрабатываемой области выбираются исходя из объема злокачественной опухоли, подлежащей удалению. В ходе операции на злокачественную опухоль воздействует одинаковая доза излучения, в то время как доза, воздействующая на здоровые ткани, сохраняется на минимальном уровне. Примером системы оперативной электронно-лучевой терапии является патент США № 5321271, выданный 14 июня 1994 г. на имя Шонберга и соавторов.
Для реализации оперативной электронно-лучевой терапии раковых опухолей используются специальные трубки, называемые аппликаторами, которые задают форму и направляют электронный пучок на необходимую область ткани пациента, не позволяя электронному пучку воздействовать на здоровые ткани. Облучающая головка, генерирующая электронный пучок, должна быть точно совмещена с аппликатором для поддержания симметричности и однородности электронного пучка.
При одном из способов совмещения облучающей головки с аппликатором, известном как жесткая стыковка, аппликатор присоединен непосредственно к облучающей головке. Жесткая стыковка не является идеальным вариантом реализации системы, поскольку при этом способе аппликатор одновременно контактирует с пациентом и с достаточно большой и тяжелой облучающей головкой системы. Если облучающая головка случайно придет в движение, аппликатор может задеть и повредить пациента.
При мягкой стыковке облучающая головка не находится в непосредственном контакте с аппликатором. В одном из существующих способов мягкой стыковки используется веерообразная ориентация лазерного луча вокруг металлического стержня, соосного с осью аппликатора. Основание указанного стержня и верхняя часть аппликатора расположены на изоцентре установки. Осуществление стыковки по схеме стержня и диска предполагает, что верхняя часть аппликатора находится на одном уровне по высоте с изоцентром установки и что центральная линия аппликатора находится в плоскости, перпендикулярной центру вращения установки лучевой терапии. Портативные установки лучевой терапии не имеют фиксированного положения изоцентра, а положение плоскости пациента строго задается геометрией конструкции, что затрудняет использование схемы.
В другом существующем способе осуществления мягкой стыковки многочисленные точки воздействия лазерного излучения выстроены вдоль линии, намеченной на верхней части аппликатора. Схема стыковки с большим числом лазерных пучков предполагает наличие восьми точек воздействия лазерных лучей, создаваемых четырьмя парами лазеров, которые сливаются в четыре точки на окружности, намеченной на верхней поверхности аппликатора. Взаимно ортогональные движения, осуществляемые при выстраивании точек в линию, приводят к одинаковым движениям точек воздействия на поверхности аппликатора. Это затрудняет определение того, какое движение процедурной головки оптимально для достижения выстраивания точек воздействия.
Все существующие схемы стыковки имеют один или несколько недостатков, включая риск повреждения пациента, затрудненность выстраивания точек воздействия в необходимом порядке и отсутствие блокировки, которая позволила бы исключить использование системы до достижения выстраивания точек воздействия. Следовательно, необходимо разработать новые улучшенные способы и устройства для осуществления стыковки медицинских систем лучевой терапии с аппликатором.
В соответствии с первым аспектом настоящего изобретения обеспечивается система мягкой стыковки для медицинских систем лучевой терапии, включающая облучающую головку, аппликатор, имеющий фиксированное положение относительно пациента, а также средства регулировки положения облучающей головки относительно аппликатора. Система мягкой стыковки включает один или более сенсорных модулей для определения положения облучающей головки относительно аппликатора и генерирования одного или более сигналов, описывающих положение облучающей головки, а также систему визуализации, показывающую положение облучающей головки относительно аппликатора. Положение облучающей головки может регулироваться до достижения нужного положения при помощи указанной системы визуализации.
Устройство может включать несколько сенсорных модулей для определения положения облучающей головки по осям X, Y и Z, а также наклон облучающей головки по осям Х и Y относительно аппликатора. Сенсорные модули могут включать первый сенсорный модуль для определения положения облучающей головки по оси Y и наклона облучающей головки по оси Y, второй сенсорный модуль для определения положения облучающей головки по оси Y и наклона облучающей головки по оси Х и третий сенсорный модуль для определения положения облучающей головки по оси Z.
Первый и второй сенсорные модули могут включать генераторы лазерного излучения, соединенные с облучающей головкой, для направления линейного пучка лазерного излучения на отражающий поверхность, жестко соединенную с аппликатором таким образом, чтобы часть линейного пучка лазерного излучения отражалась от отражающей поверхности. Массив фотосенсоров, определяющих положение облучающей головки, соединенный с облучающей головкой, принимает часть линейного лазерного пучка, отраженную от отражающей поверхности, и генерирует сигнал положения облучающей головки. Часть линейного лазерного пучка, отраженная от отражающей поверхности, зависит от положения аппликатора и характеризует положение аппликатора. Массив фотосенсоров, определяющих наклон облучающей головки, соединенный с облучающей головкой и ориентированный перпендикулярно линейному лазерному пучку, определяет наклон отражающей поверхности относительно облучающей головки и генерирует сигнал наклона облучающей головки.
Третий сенсорный модуль может включать генератор линейного пучка лазерного излучения, соединенный с облучающей головкой и служащий для направления линейного пучка лазерного излучения на отражающую поверхность, и массив фотосенсоров, определяющих положение облучающей головки по оси Z, соединенный с облучающей головкой и ориентированный перпендикулярно линейному пучку лазерного излучения, который служит для принятия пучка лазерного излучения и генерирования сигнала положения по оси Z.
Устройство визуализации может включать первый, второй, третий, четвертый и пятый массивы светодиодов, соответственно характеризующие положение по оси X, положение по оси Y, положение по оси Z, наклон по оси Х и наклон по оси Y. Светящиеся светодиоды первого, второго и третьего массивов светодиодов характеризуют положение облучающей головки относительно аппликатора. Светящиеся светодиоды четвертого и пятого массивов светодиодов характеризуют угол наклона облучающей головки относительно аппликатора.
Система стыковки может также включать средства реагирования на сигналы положения облучающей головки для генерирования блокирующего сигнала, который позволил бы исключить облучение пациента облучающей головкой до тех пор, пока сигналы положения облучающей головки не свидетельствуют о достижении необходимого положения облучающей головки относительно аппликатора.
В соответствии со вторым аспектом настоящего изобретения обеспечивается способ осуществления мягкой стыковки облучающей головки с аппликатором. Способ включает шаги определения положения облучающей головки относительно аппликатора и генерирования одного или более сигналов положения указанной облучающей головки, которые визуализируют положение облучающей головки относительно аппликатора на устройстве визуализации в соответствии с поступающими сигналами положения облучающей головки относительно аппликатора таким образом, что устройство визуализации визуализирует указанное положение облучающей головки.
Для обеспечения лучшего описания настоящего изобретения в указанном описании приводятся ссылки на сопроводительные фигуры, включенные в настоящее описание в виде ссылок и среди которых:
На фиг.1 приводится схематическая диаграмма примера медицинской системы лучевой терапии, включающей систему мягкой стыковки в соответствии с настоящим изобретением.
На фиг.2 приводится схематическая диаграмма фрагмента системы мягкой стыковки в виде вдоль оси пучка излучения.
На фиг.3 приводится схематическая диаграмма первого типа сенсорного модуля лазерного излучения системы мягкой стыковки, приведенной на фиг.1 и 2;
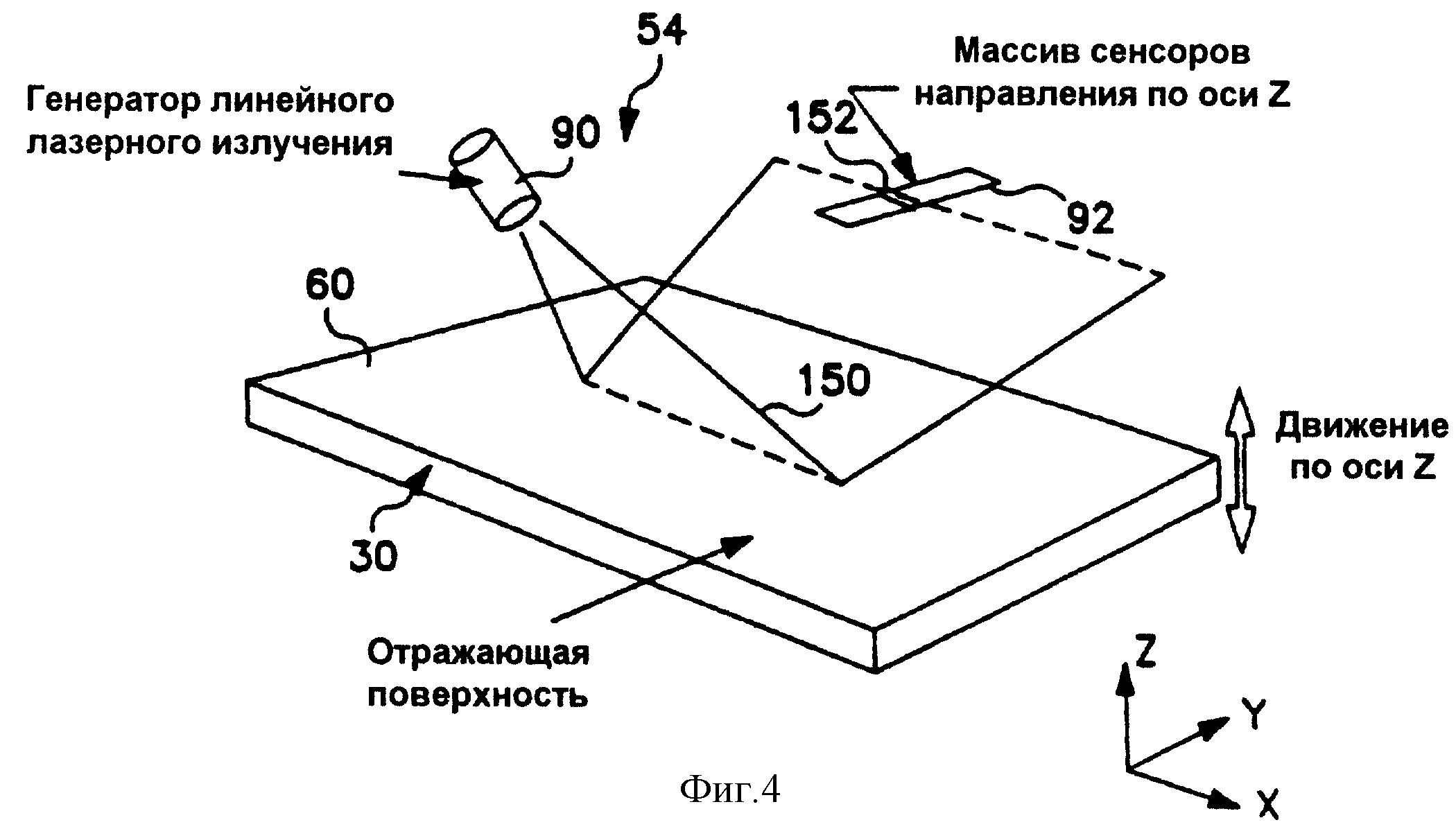
На фиг.4 приводится схематическая диаграмма второго типа сенсорного модуля лазерного излучения системы мягкой стыковки, приведенной на фиг.1 и 2;
На фиг.5 приводится блок-схема системы мягкой стыковки в соответствии с настоящим изобретением;
На фиг.6 иллюстративно приводится устройство визуализации системы мягкой стыковки в соответствии с настоящим изобретением.
Упрощенные схематические диаграммы примеров медицинских систем лучевой терапии, включающих систему мягкой стыковки в соответствии с настоящим изобретением, приводятся на фигурах 1 и 2. Система лучевой терапии 10 включает облучающую головку 12 и аппликатор 20. Облучающая головка 12 генерирует пучок излучения 14, например электронный пучок, который через аппликатор 20 поступает на участок тела пациента 24, Система лучевой терапии 10 может быть реализована, например, системой электронно-лучевой терапии Mobetron, производимой компанией Intraop Medical Inc., Санта Клара, штат Калифорния. Аппликатор 20 включает кольцевое зеркало 30 и цилиндрическую трубку аппликатора 32, выдвигающуюся из зеркала 30 в направлении пациента 24. Аппликатор 20 жестко закреплен относительно пациента 24 посредством крепежного устройства 40, которое обычно закрепляется на хирургическом столе, на котором располагается пациент. Облучающая головка 12 может двигаться с тремя степенями свободы, а также наклоняться относительно аппликатора 20.
Во время хирургической процедуры осуществляют приведение аппликатора в определенное фиксированное положение относительно облучаемого участка тела пациента.
Для обеспечения надлежащей работы системы лучевой терапии облучающая головка 12 должна быть точно совмещена с аппликатором 20. В частности, ось облучающей головки 12 должна быть коллинеарной с осью цилиндрической трубки аппликатора 32, и между облучающей головкой 12 и аппликатором 20 должно соблюдаться фиксированное расстояние S, как правило, около 4 сантиметров. Правильное взаимное расположение облучающей головки и аппликатора может обеспечиваться засчет контроля положения облучающей головки 12 относительно аппликатора 20 по осям X, Y и Z, а также контроля угла наклона облучающей головки 12 относительно аппликатора 20 по осям Х и Y.
Для обеспечения надлежащего расположения облучающей головки 12 относительно аппликатора 20 система лучевой терапии 10 включает систему мягкой стыковки. Стыковка, обеспечиваемая указанной системой, определена термином "мягкая" в том смысле, что облучающая головка 12 не находится в непосредственном физическом контакте с аппликатором 20. Система мягкой стыковки включает сенсорные модули 50, 52 и 54, которые схематично изображены на фиг.1 и 2. Сенсорные модули 50, 52 и 54 установлены на облучающей головке 12 вблизи прохождения электронного пучка 14. Каждый из сенсорных модулей направляет лазерный пучок на отражающую поверхность 60 кольца 30. Лазерные пучки отражаются обратно от отражающей поверхности на сенсорные устройства в составе соответствующих сенсорных модулей, в результате чего осуществляется определение положения и угла наклона облучающей головки, что подробно описано ниже.
Как показано на фиг.2, сенсорный модуль 50 включает лазерный светодиод 70 и массивы фотосенсоров 72 и 74. Массив фотосенсоров 72 определяет положение облучающей головки по оси X, а массив фотосенсоров 74 определяет наклон облучающей головки по оси Y. Сенсорный модуль 52 включает лазерный светодиод 80 и массивы фотосенсоров 82 и 84. Фотосенсор 82 определяет положение облучающей головки по оси Y, а массив фотосенсоров 84 определяет наклон облучающей головки по оси X. Сенсорный модуль 54 включает лазерный светодиод 90 и массив фотосенсоров 92, который определяет положение облучающей головки по оси Z.
Система мягкой стыковки дополнительно включает устройство визуализации 100, которая может быть установлена на облучающей головке 12, и электронный блок 110 (фиг.5), с помощью которого осуществляется соединение между сенсорными модулями и системой визуализации 100. Устройство визуализации 100 в предпочтительном варианте включает массивы светодиодов, которые характеризуют положение и ориентацию в пространстве облучающей головки 12 относительно аппликатора 20.
Из фиг.6 лучше всего видно, что устройство визуализации 100 может включать линейный массив светодиодов 120 для визуализации положения облучающей головки по оси Y, линейный массив светодиодов 122 для визуализации положения облучающей головки по оси X, нелинейный массив светодиодов 124 для визуализации наклона облучающей головки по оси X, нелинейный массив светодиодов 126 для визуализации наклона облучающей головки по оси Y и линейный массив светодиодов 128 для визуализации положения облучающей головки по оси Z. В каждом массиве отдельный светодиод характеризует положение или наклон облучающей головки. При регулировке положения облучающей головки 12 изменяется светящийся светодиод в одном или более массивов светодиодов. По достижении необходимого положения облучающей головки засвечивается светодиод в центре каждого из массивов светодиодов. Массивы светодиодов 120 и 122 могут образовывать конфигурацию светодиодов в форме креста, причем в центре каждого из массивов светодиодов расположен светодиод 160.
На фиг.3 приводится эскиз примера сенсорного модуля 50. Лазерный светодиод 70 генерирует веерообразный линейный пучок лазерного излучения 140. Лазерные светодиоды для создания линейных пучков лазерного излучения в настоящее время доступны на рынке. Линейный пучок лазерного излучения 140 падает на отражающую поверхность 60 кольца 30 вдоль линии 138, параллельной оси X. Линейный пучок лазерного излучения 140 отражается от отражающей поверхности 60 под углом, зависящим от угла наклона отражающей поверхности 60 относительно светодиода 70. Массив фотосенсоров 74 представляет собой линейный массив фотосенсоров, ориентированный перпендикулярно линейному пучку лазерного излучения 140. Как видно из фиг.3, место, в котором линейный пучок лазерного излучения 140 падает на массив фотосенсоров 74, зависит от угла наклона 144 отражающей поверхности 60 относительно лазерного светодиода 70. Таким образом, фотосенсорный элемент 146 массива фотосенсоров 74, на который падает пучок 140, характеризует угол наклона 144.
Массив фотосенсоров 72 может представлять собой линейный массив фотосенсоров и расположен параллельно линейному пучку лазерного излучения 140. Массив фотосенсоров 72 расположен таким образом, чтобы воспринимать линейный пучок лазерного излучения 140, когда угол наклона отражающей поверхности 60 относительно облучающей головки 12 составляет 0° . Лазерный светодиод 70 расположен относительно кольца 30 таким образом, чтобы часть линейного пучка лазерного излучения 140 отражалась от отражающей поверхности 60, а другая часть указанного пучка излучения 140 проходила через край 142 отражающей поверхности 60 и, следовательно, не отражалась. Таким образом, длина линейного пучка лазерного излучения 140, отраженного и освещающего массив фотосенсоров 72, зависит от положения кольца 30 относительно лазерного фотодиода 70 вдоль оси X. Это означает, что при движении облучающей головки 12 вдоль направления оси Х относительно кольца 30 отраженная часть линейного пучка лазерного излучения 140 освещает большую или меньшую часть массива фотосенсоров 72. Таким образом, освещенная часть массива фотосенсоров 72 характеризует положение облучающей головки 12 относительно кольца 30 по оси X.
Сенсорный модуль 52 может иметь конфигурацию, аналогичную конфигурации сенсорного модуля 50, но ориентирован таким образом, чтобы определять положение облучающей головки по оси Y и наклон облучающей головки по оси X. В сенсорном модуле 52 линейный пучок лазерного излучения, генерируемый лазерным фотодиодом 80, падает на отражающую поверхность 60 вдоль линии, параллельной оси Y, в результате чего происходит определение положения облучающей головки по оси Y и наклон облучающей головки по оси X, как описано выше.
Эскиз сенсорного модуля 54 приводится на фиг.4. Лазерный светодиод 90 направляет веерообразный линейный пучок лазерного излучения 150 на отражающую поверхность 60, расположенную на кольце 30. Предполагается, что кольцо 30 расположено таким образом, что отражающая поверхность 60 перпендикулярна электронному пучку 14. Массив фотосенсоров 92 представляет собой линейный массив фотосенсоров, ориентированный перпендикулярно линейному пучку лазерного излучения 150. Линейный пучок лазерного излучения 150 падает на отражающую поверхность 60 под относительно малым углом и отражается на массив фотосенсоров 92. Место, в котором отраженный линейный пучок лазерного излучения 150 падает на массив фотосенсоров 92, зависит от положения отражающей поверхности 60 относительно облучающей головки 12 по оси Z. Таким образом, элемент 152 массива фотосенсоров 92, освещаемый отраженным линейным пучком лазерного излучения 150, характеризует положение облучающей головки 12 относительно аппликатора 20 по оси Z.
Поскольку при работе системы могут создаваться помехи от окружающего света, в предпочтительном варианте перед каждым из массивов фотосенсоров 72, 74, 82, 84 и 92 устанавливается полосно-пропускающий оптический фильтр с узкой полосой пропускания. Каждый полосно-пропускающий оптический фильтр имеет полосу пропускания, которая соответствует длине волны соответствующего лазерного светодиода. Как показано на фиг.5, выходные сигналы фотосенсоров 72, 74, 82, 84 и 92 поступают на электронный блок 110. Электронный блок 110 включает стандартную схему, преобразующую выходные сигналы соответствующих фотосенсоров в сигналы, воспринимаемые устройство визуализации 100. В частности, электронный блок 110 подает питание на один или более светодиодов каждого из массивов светодиодов 120, 122, 124, 126 и 128 устройства визуализации 100.
Количество светящихся элементов массива светодиодов 122 определяется количеством элементов массива фотосенсоров 72, освещенных линейным пучком лазерного излучения 140 (фиг.3). Таким образом, при движении облучающей головки 12 вдоль направления оси Х относительно аппликатора 20 количество светящихся элементов массива светодиодов 122 изменяется. Аналогично количество светящихся элементов массива светодиодов 120 характеризует положение облучающей головки 12 относительно аппликатора 20 по оси Y, которое определяется массивом фотосенсоров 82.
Элемент массива светодиодов 126 светится в зависимости от того, какой элемент 146 массива фотосенсоров 74 (фиг.3) освещается линейным пучком лазерного излучения 140. При изменении угла наклона 144 аппликатора 20 относительно облучающей головки 12 по оси Y светится разное количество массива светодиодов 126. Когда угол наклона 144 аппликатора 20 относительно облучающей головки 12 по оси Y составляет 0°, светится элемент 162 массива светодиодов 126. Аналогично элемент 164 массива светодиодов 124 светится, когда угол наклона облучающей головки 12 относительно аппликатора 20 по оси Х составляет 0°.
Элемент массива светодиодов 128 светится в зависимости от того, какой элемент 152 массива фотосенсоров 92 (фиг.4) освещается линейным пучком лазерного излучения 150. Когда облучающая головка 12 находится в корректном положении относительно аппликатора 20 по оси Z, светится элемент 166 массива светодиодов 128. Когда положения облучающей головки 12 относительно аппликатора 20 по осям X, Y и Z, а также углы наклона облучающей головки 12 относительно аппликатора 20 по осям Х и Y корректны, что означает, что облучающая головка 12 и аппликатор 20 совмещены корректно и по положению, и по углу наклона, светится элемент 160 массивов светодиодов 120 и 122.
В каждом из описанных случаев светящийся элемент соответствующего массива светодиодов устройства визуализации 100 зависит от положения соответствующего линейного пучка лазерного излучения на соответствующем массиве фотосенсоров. Элементы массивов светодиодов 120, 122, 124, 126 и 128 могут быть снабжены цветовой кодировкой для визуального выделения корректного положения. Например, красные светодиоды могут использоваться для визуализации неправильного положения, в то время как светодиоды 160, 162, 164 и 166, которые соответствуют корректному положению и углу наклона облучающей головки относительно аппликатора, могут быть зелеными.
Электронный блок 110 в предпочтительном варианте включает систему, обеспечивающую возможность блокировки. Электронный блок 110 генерирует блокирующий сигнал, поступающий на ту часть системы лучевой терапии 10, которая осуществляет генерирование электронного пучка 14. Сигнал системы блокировки запрещает генерирование электронного пучка 14 до тех пор, пока облучающая головка 12 не будет приведена в корректное положение и не будет иметь корректную ориентацию относительно аппликатора 20. Таким образом, электронный блок 110 может включать схему мониторинга положения облучающей головки 12 относительно аппликатора 20 по осям X, Y и Z и наклона облучающей головки 12 относительно аппликатора 20 по осям Х и Y. По достижении корректного положения облучающей головки относительно аппликатора по осям X, Y и Z, а также корректного угла наклона облучающей головки относительно аппликатора по осям Х и Y, что определяется светящимися элементами 160, 162, 164 и 166 устройства визуализации 100, сигнал системы блокировки разрешает генерирование электронного пучка 14.
При работе системы производится определение положения облучающей головки относительно аппликатора и генерирование одного или более сигналов положения указанной облучающей головки. При этом аппликатор и облучающая головка являются независимыми элементами системы.
Производится также визуализация положения облучающей головки относительно аппликатора на устройстве визуализации в соответствии с сигналами положения головки и регулирование положения головки относительно аппликатора до достижения нужного положения головки в соответствии с показаниями устройства визуализации.
Устройство визуализации 100 используется оператором для совмещения облучающей головки 12 относительно аппликатора 20. В частности, оператор может использовать систему позиционирования 200, приведенную на фиг.1, для осуществления контроля положения и ориентации облучающей головки 12 относительно аппликатора 20. Система позиционирования 200 может включать приводы, регулирующие положение и ориентацию облучающей головки 12. Система позиционирования 200 может иметь, например, кнопки управления для изменения положения положения облучающей головки 12 относительно аппликатора 20 по осям X, Y и Z и наклона облучающей головки 12 относительно аппликатора 20 по осям Х и Y. Оператор осуществляет манипулирование с помощью системы позиционирования 200 до тех пор, пока устройство визуализации 100 не сигнализирует корректное положение облучающей головки 12 относительно аппликатора 20. В этот момент сигнал системы блокировки разрешает генерирование электронного пучка 14, после чего пациент может получать необходимые процедуры.
В качестве иллюстрации приводится пример осуществления позиционирования с помощью системы мягкой стыковки в соответствии с настоящим изобретением. Когда облучающая головка 12 наклонена в одной из плоскостей, активизируется светодиод одного из нелинейных массивов светодиодов, соответствующего данной плоскости. Данный светодиод сигнализирует наклон облучающей головки в соответствующей плоскости. Когда ось электронного пучка перпендикулярна отражающей поверхности, в указанной плоскости светится только центральный светодиод соответствующего массива светодиодов. Светодиод, сигнализирующий наклон в перпендикулярной плоскости, действует аналогичным образом. Когда ось электронного пучка перпендикулярна отражающей поверхности 60 в обеих взаимно перпендикулярных плоскостях облучающая головка 12 перемещается до достижения ею центра аппликатора 20 по осям Х и Y. По мере движения облучающей головки, например, вдоль оси X, активизируется часть светодиодов горизонтального массива светодиодов 122. Когда облучающая головка достигает центрального положения на оси электронного пучка по оси X, светится ровно половина светодиодов массива светодиодов 122, включая два светодиода на обоих краях большого центрального элемента 160. Движение облучающей головки вдоль оси Y приводит к активизации светодиодов вертикального массива светодиодов 120 аналогичным образом. По мере того как меняется расстояние от облучающей головки 12 до аппликатора 20 по оси Z активизируются отдельные элементы массива светодиодов 128, соответствующие положению по оси Z. Когда положение облучающей головки по оси Z корректно, загорается центральный элемент 166 массива светодиодов 128. Если облучающая головка 12 корректно позиционирована относительно аппликатора 20 и по положению, и по углу наклона, загорается большой центральный элемент 160 устройства визуализации, сигнализируя о завершении процедуры стыковки и об активизации разрешающего сигнала системы блокировки.
Во избежание проблем, связанных с помехами от окружающего света, лазерные лучи системы мягкой стыковки могут быть модулированными. Синхронизированная регистрация излучения фотодетекторами, связанными с аналоговым компьютером, позволяет не прибегать к использованию полосно-пропускающих оптических фильтров. За счет использования двух массивов фотодетекторов и светодиодных дисплеев система может быть реализована с использовании только двух лазеров и двух детекторов. В этом случае светодиодный дисплей будет иметь только один массив светодиодов для определения положения облучающей головки по осям Х и Y и один массив светодиодов для определения положения облучающей головки по оси Z.
В настоящем описании приводится и описывается то, что на данный момент считается предпочтительным вариантом реализации настоящего изобретения, однако для специалистов в настоящей области должно быть очевидным, что в описании могут быть произведены различные изменения и модификации без ущерба для сути изобретения, которая заявляется в нижеприведенной формуле.
Реферат
Изобретение относится к области медицины, а именно к области систем и способов управления положением медицинских систем лучевой терапии относительно аппликатора. Система медицинской лучевой терапии включает облучающую головку, аппликатор, положение которого относительно пациента фиксировано, и устройство для регулировки положения облучающей головки относительно аппликатора. Система мягкой стыковки включает один или более модулей сенсорных головок для определения положения облучающей головки относительно аппликатора и генерации одного или более сигналов, описывающих указанное положение, а также устройство визуализации, принимающее указанные сигналы положения облучающей головки и визуализирующее положение облучающей головки относительно аппликатора. Положение облучающей головки может регулироваться исходя из показаний устройства визуализации до достижения нужного положения. 3 с.п. ф-лы, 6 ил.

Комментарии