Устройство электростимуляции мышц - RU2749177C2
Код документа: RU2749177C2
Чертежи


Описание
Настоящее изобретение относится к устройствам электростимуляции мышц.
Устройство электростимуляции мышц известно как один пример устройств для тренировки мышц. Устройство электростимуляции мышц порождает течение электрического тока в мышечном волокне с целью напряжения или расслабления мышцы. Считается, что это приводит к росту мышцы. Например, в патентном документе 1 предложено устройство электростимуляции мышц. Описанное в патентном документе 1 устройство электростимуляции мышц прикреплено, например, к животу и стимулирует соответствующие мышцы.
Патентный документ 1: JP2017-6644.
Мы приобрели следующие знания относительно устройств электростимуляции мышц. Желательно, чтобы беспроводное устройство электростимуляции мышц обеспечивало некоторую степень свободы верхней или нижней конечности во время тренировки. Один возможный подход к решению этой проблемы заключается во встраивании батареи первичных элементов или аккумуляторной батареи в устройство электростимуляции мышц с целью приведения в действие устройства электростимуляции мышц с использованием упомянутой батареи. Если период времени исчерпания емкости этой батареи является коротким, то это может привести к коротким циклам смены или зарядки батареи и плохим потребительским свойствам.
Чтобы увеличить цикл смены или зарядки батареи, может быть увеличена емкость встроенной батареи. Тем не менее, устройство электростимуляции мышц носится на теле, и, таким образом, желательно уменьшение размера и веса. При увеличении емкости встроенной батареи, будут увеличиваться размер и вес батареи, что противоречит к потребности в уменьшении размера и веса.
На основе сказанного выше мы поняли, что устройства электростимуляции мышц могут быть улучшены с точки зрения эффективности электростимуляции мышц.
С учетом сказанного, общая задача настоящего изобретения заключается в том, чтобы предложить устройство электростимуляции мышц, которое способно эффективно осуществлять электростимуляцию мышц.
Для решения указанной выше задачи устройство электростимуляции мышц, соответствующее варианту осуществления настоящего изобретения, содержит основную часть с поверхностью контакта, которая расположена вокруг участка нижней конечности или верхней конечности, на котором расположено устройство. Поверхность контакта продолжается в направлении Х, окружая участок, на котором расположено устройство, и в направлении Y, которое перпендикулярно направлению Х, основная часть снабжена парой электродов, расположенных на расстоянии в направлении Y, и каждый электрод из пары электродов имеет форму полосы, протяженность которой в направлении Х больше протяженности в направлении Y, и выполнен с возможностью порождения течения электрического тока в участке, на котором расположено устройство, вдоль направления протяженности мышечного волокна в участке, на котором расположено устройство.
В соответствии с этим вариантом осуществления изобретения электроды в форме полос, протяженность которых в направлении Х больше протяженности в направлении Y, позволяют течь электрическому току в участке, на котором расположено устройство, вдоль направления протяженности мышечного волокна.
В качестве дополнительных вариантов настоящего изобретения также могут быть использованы на практике необязательные комбинации упомянутых выше структурных элементов и замены структурных элементов и реализации изобретения в форме способов, устройств и систем.
Далее варианты осуществления изобретения будут описаны только в качестве примера со ссылками на приложенные чертежи, которые также являются примерами и не ограничивают изобретение, при этом аналогичные элементы обозначены одинаковыми ссылочными позициями на разных фигурах.
На фиг. 1 показан вид, схематично изображающий пространство рядом с парой электродов, прикрепленных к некоторому участку, на котором расположено устройство;
на фиг. 2A и 2В - виды, схематично показывающие тренировочную систему, которая использует устройство электростимуляции мышц, соответствующее первому варианту осуществления изобретения;
на фиг. 3 - вид, показывающий структурную схему, иллюстрирующую функциональные признаки тренировочной системы по фиг. 2A и 2B;
на фиг. 4 - вид спереди устройства электростимуляции мышц по фиг. 2A и 2B;
на фиг. 5 - вид сверху устройства электростимуляции мышц по фиг. 2A и 2B;
на фиг. 6 - вид сзади устройства электростимуляции мышц по фиг. 2A и 2B;
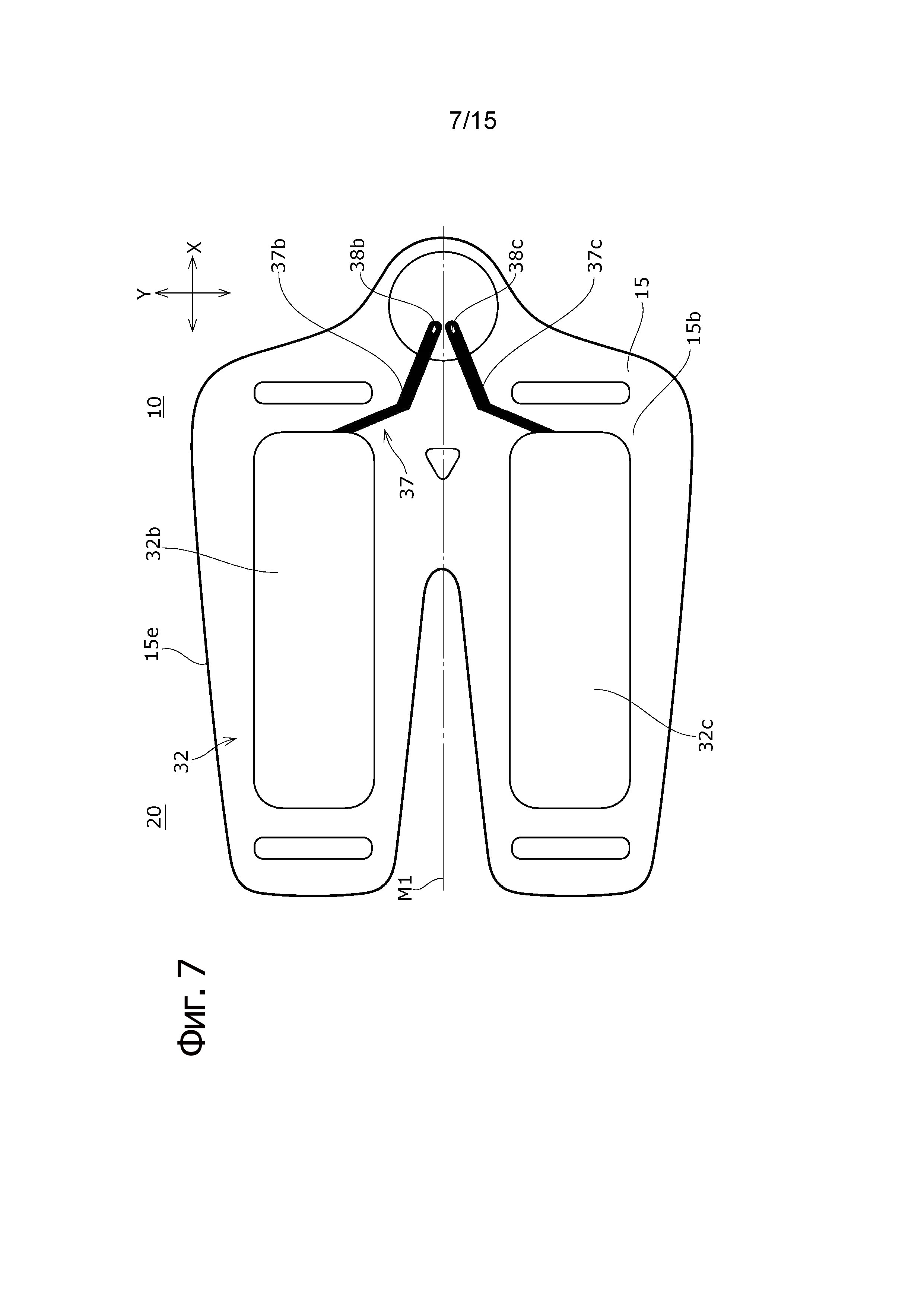
на фиг. 7 - вид сзади, показывающий пример расположения проводов устройства электростимуляции мышц по фиг. 2A и 2B;
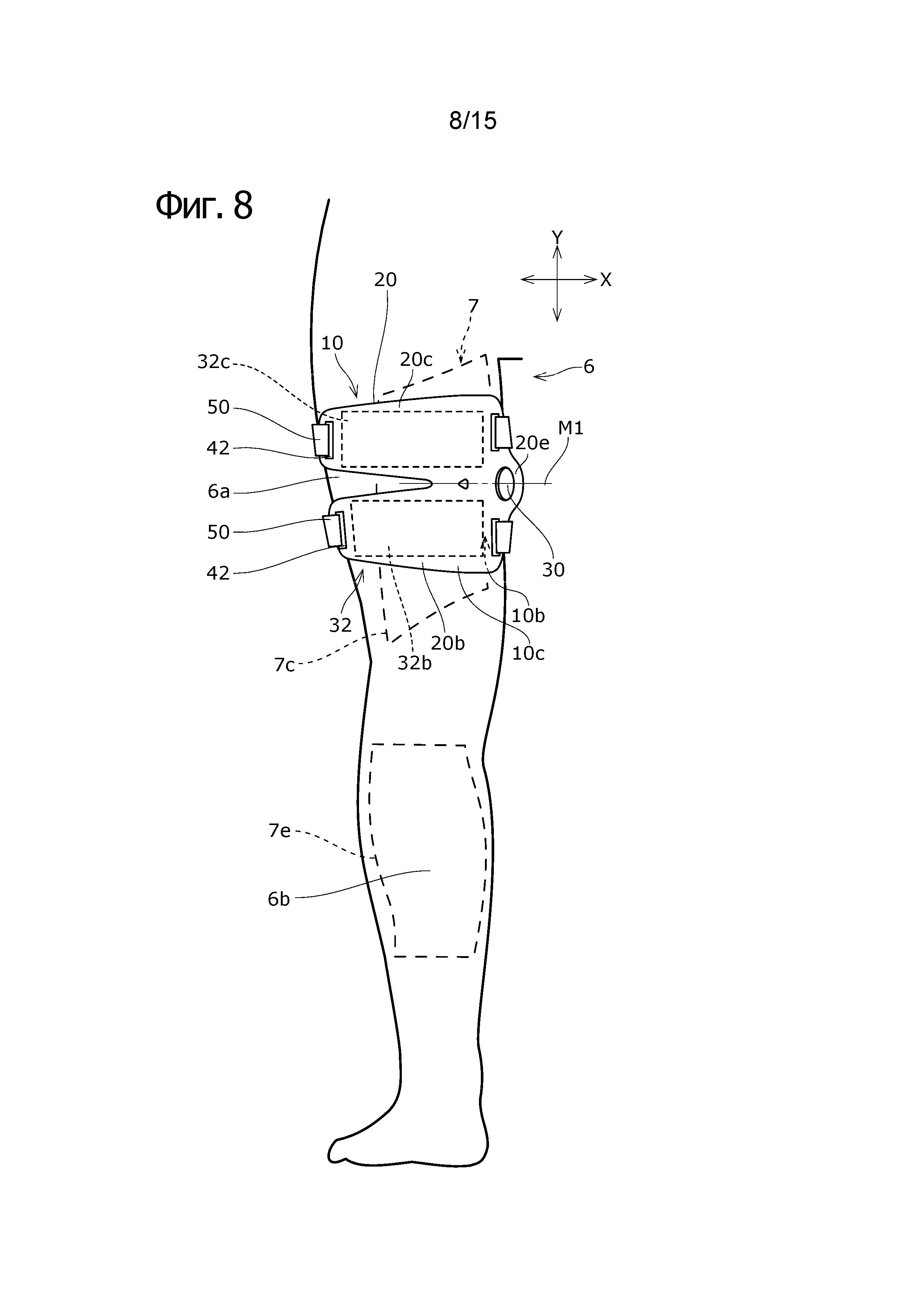
на фиг. 8 - вид, схематично показывающий устройство электростимуляции мышц по фиг. 2A и 2B, расположенное сзади верхнего участка ноги;
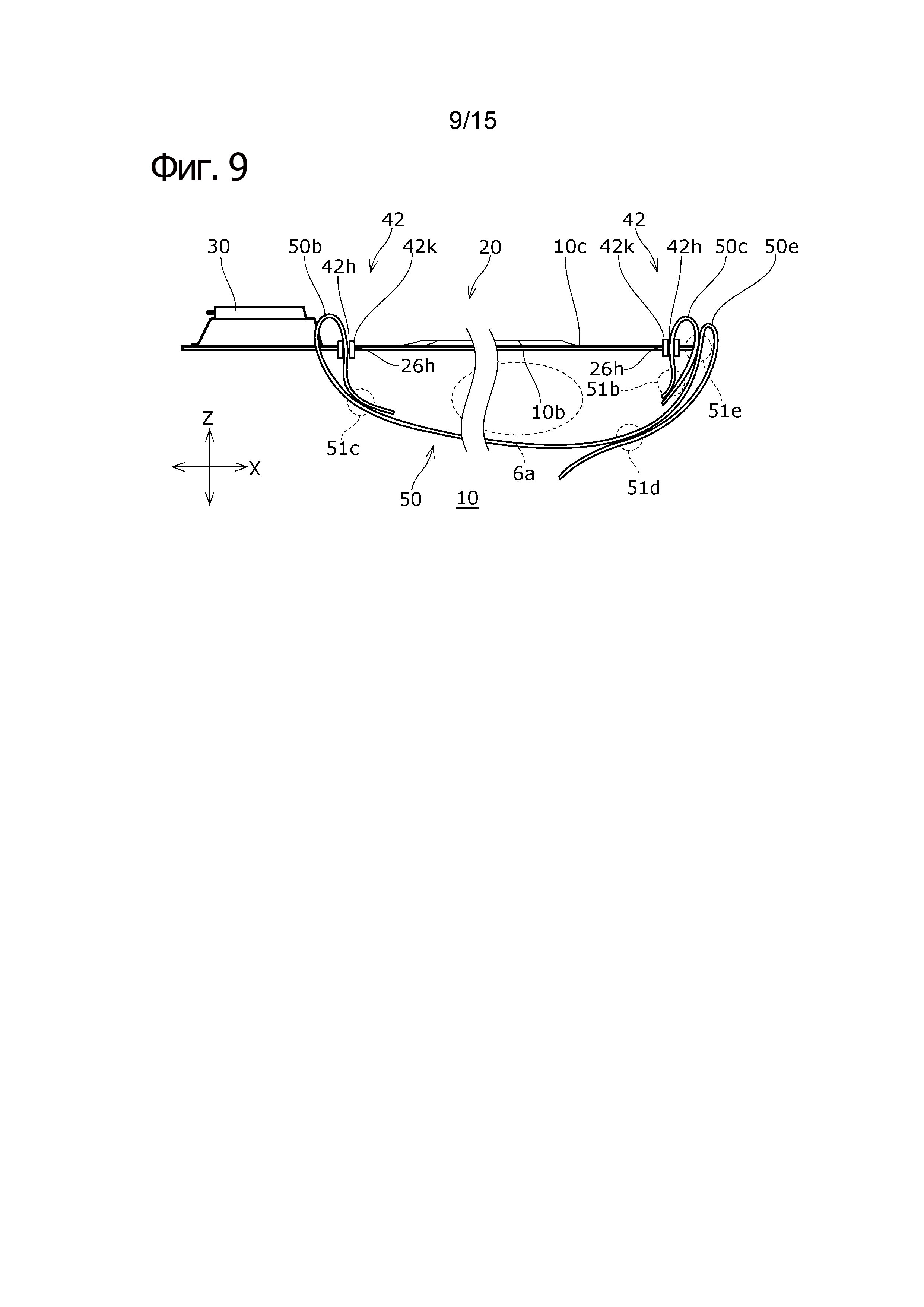
на фиг. 9 - вид сверху, показывающий пример поясных элементов устройства электростимуляции мышц по фиг. 2A и 2B;
на фиг. 10 - вид, показывающий блок-схему, иллюстрирующую пример работы устройства электростимуляции мышц по фиг. 2A и 2B;
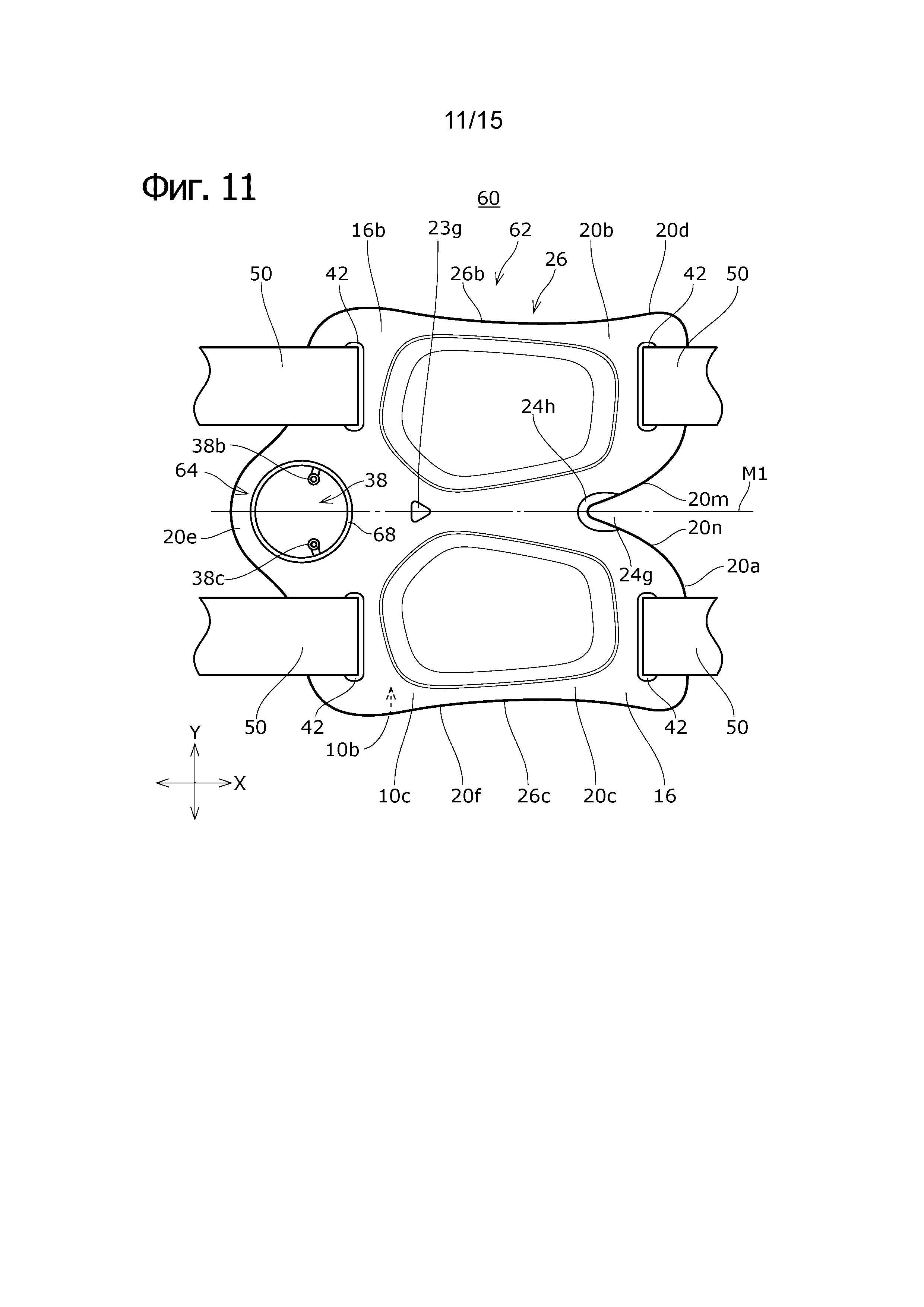
на фиг. 11 - вид спереди устройства электростимуляции мышц, соответствующего второму варианту осуществления изобретения;
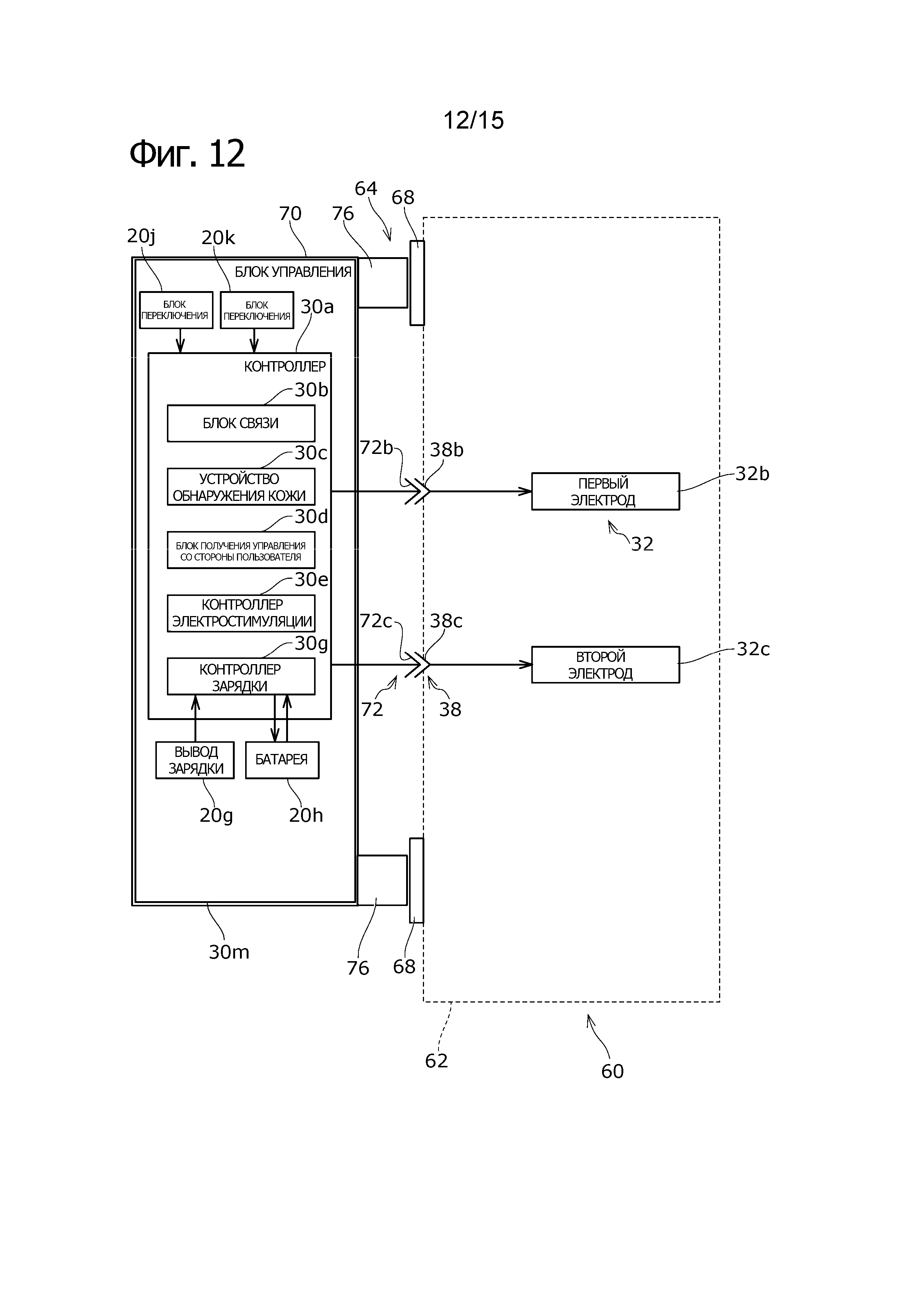
на фиг. 12 - вид, показывающий структурную схему, иллюстрирующую устройство электростимуляции мышц по фиг. 11;
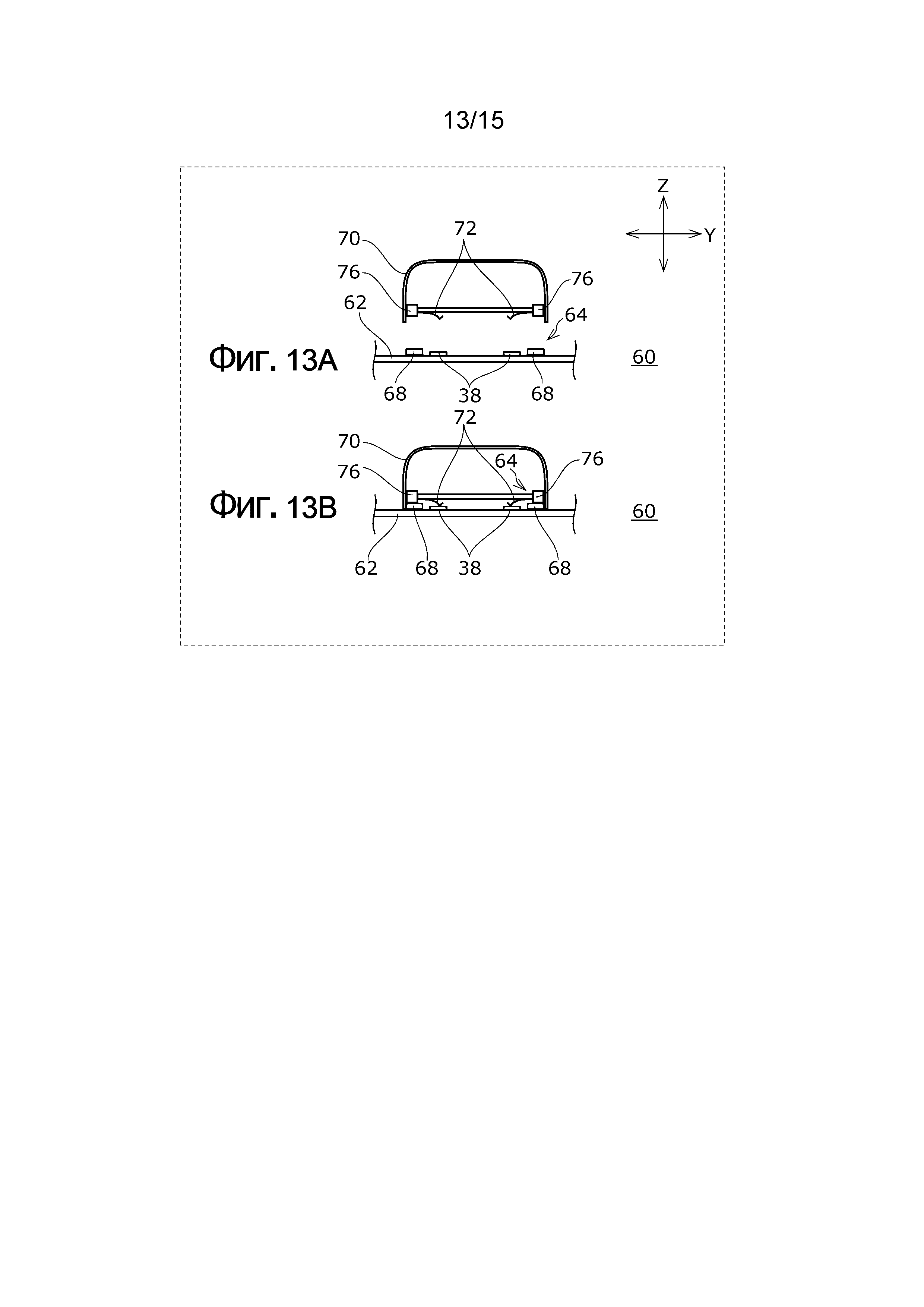
на фиг. 13A и 13B - виды сбоку, схематично показывающие пространство, окружающее механизм крепления устройства электростимуляции мышц по фиг. 11;
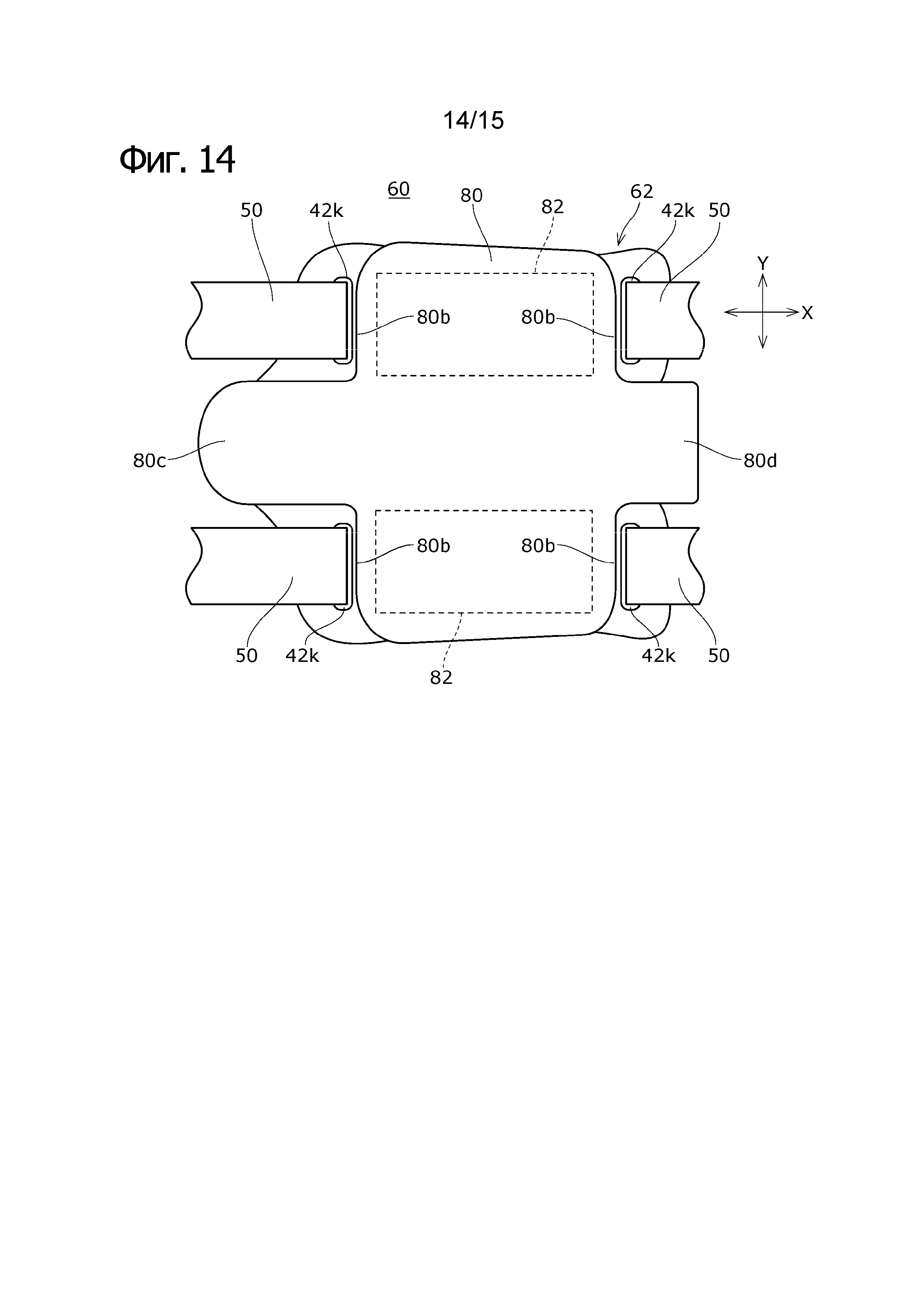
на фиг. 14 - вид сзади, показывающий лист установки, приклеенный к устройству электростимуляции мышц по фиг. 11; и
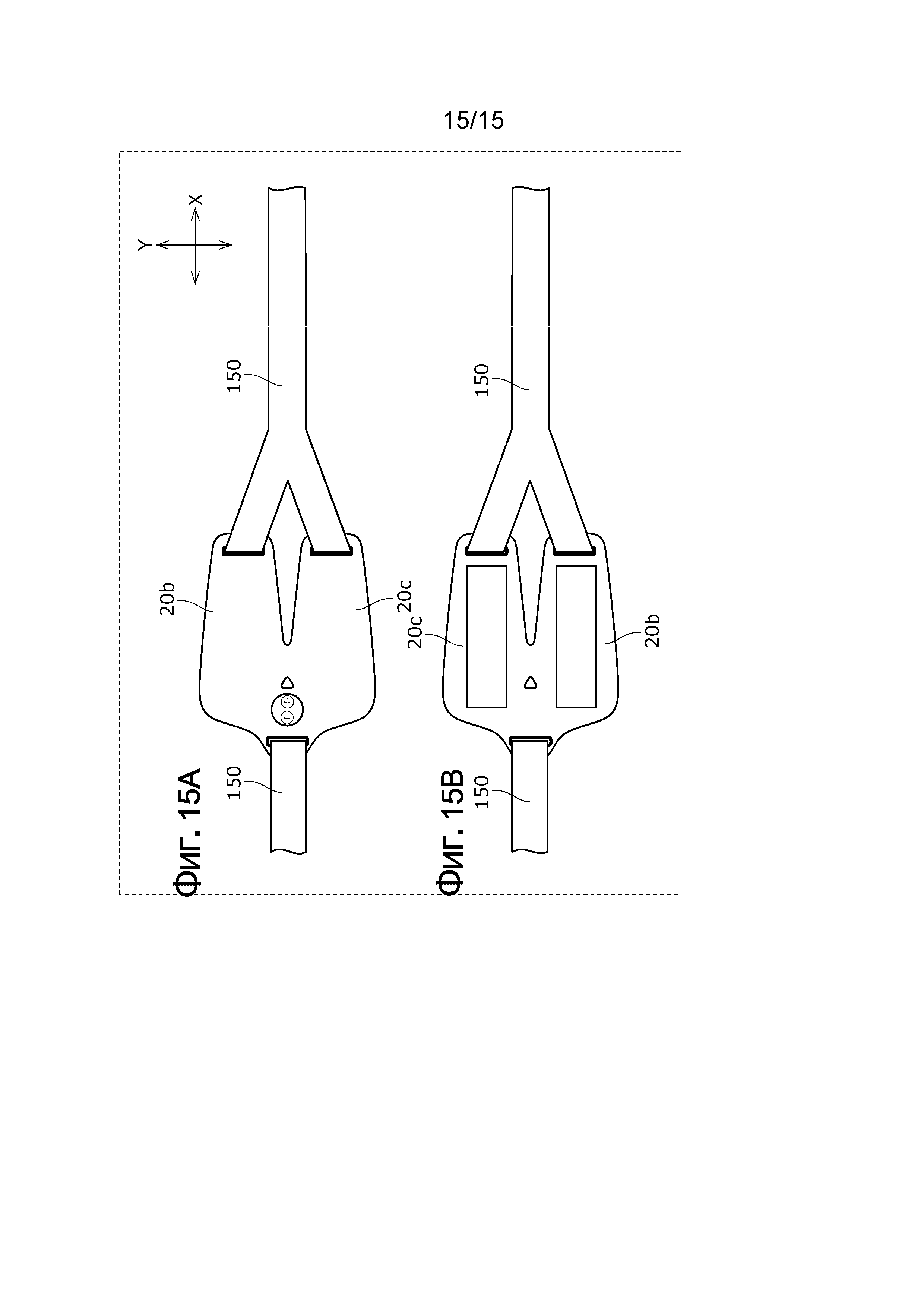
на фиг. 15A и 15B - виды, схематично показывающие поясной элемент, соответствующий четвертой модификации.
Далее изобретение будет описано со ссылками на предпочтительные варианты осуществления изобретения. Указанное не предназначено для ограничения объема настоящего изобретения, а просто является примером реализации изобретения.
Мы приобрели следующие знания относительно устройств электростимуляции мышц, которые прикреплены к верхней конечности или нижней конечности с целью использования для эффективного стимулирования мышц.
Во многих случаях верхнюю конечность и нижнюю конечность можно рассматривать, с точки зрения формы, как цилиндр, диаметр которого постепенно уменьшается к концу. На фиг. 1 схематично показано пространство рядом с парой электродов 43, прикрепленных к цилиндрическому участку 41, на котором расположено устройство. Основная мышца 44m участка 41, на котором расположено устройство, имеет ширину 44w мышцы вдоль направления по окружности цилиндрической формы (здесь и далее называется направлением Х) и длину 44d мышцы вдоль направления протяженности цилиндрической формы (здесь и далее называется направлением Y). Волокно мышцы 44m расположено в направлении Y вдоль передней и задней части кости рядом с центром между двумя суставами 41n. Считается, что ширина 44w мышцы 44m немного меньше ширины 41w полупериметра участка 41, на котором расположено устройство, и считается, что длина 44d мышц немного меньше расстояния между двумя суставами 41n. Нерв 44s, управляющий мышцей, проходит через мышцу 44m. Для тренировки мышцы 44m эффективно электрически стимулировать нерв 44s, проходящий в области, определенной шириной 44w мышцы и длиной 44d мышцы. На основе сказанного выше, ширина области расположения электродов 43 в направлении Х (здесь и далее называется шириной 43w области) может быть больше ширины 44w мышцы и, например, может соответствовать ширине 41w полупериметра верхней конечности или нижней конечности.
Далее рассмотрим длину области расположения электродов 43 в направлении Y (здесь и далее называется длиной 43d области). Длина 43d области может находиться в пределах длины 44d мышцы. Тем не менее, если электроды 43 слишком близки к суставу 41n рядом с участком, на котором расположено устройство, электроды 43 могут сильно давить на сустав 41n, когда сустав 41n согнут. По этой причине, желательно, чтобы длина 43d области была до некоторой степени меньше длины 44d мышцы. Пара электродов 43 может быть выполнена с возможностью размещения в прямоугольной области, определенной шириной 43w области и длиной 43d области, которые определены приведенными выше условиями.
В соответствии с нашим исследованием, если длина электродов 43 в направлении Y (здесь и далее называется длиной 43р электродов) чрезвычайно велика, стимуляция, ощущаемая телом, может быть слабой. Возможно, это объясняется тем, что электрический ток, стимулирующий нерв 44s, который управляет мышцей 44m, не увеличивается при увеличении длины 43р электродов. Также считается, что если длина 43р электродов увеличена, то может быть увеличен электрический ток, текущий в теле, и может быть сокращен срок службы батареи, в течение которого батарея способна порождать течение электрического тока. По существу, желательно, чтобы длина 43р электродов была такой, чтобы она была в диапазоне, при котором возможен охват нерва 44s, управляющего мышцей.
С точки зрения порождения течения электрического тока в нерве 44s в обширной области в направлении Y, целесообразно уменьшить длину 43р электродов и соответственно увеличить расстояние 43е между противоположными краями пары электродов 43. Тем не менее, слишком малая длина электродов приводит к нестабильному контакту с телом. Следовательно, желательно уменьшить длину 43р электродов до такой степени, чтобы контакт не стал нестабильным. На основе упомянутого выше, каждый электрод из пары электродов 43 может иметь форму полосы, протяженность которой в направлении Y больше протяженности в направлении Х. По существу, продольное направление пары электродов 43 может быть расположено вдоль направления Х, чтобы предоставить паре электродов 43 возможность порождения электрического тока в направлении Y в участке 41, на котором расположено устройство. Благодаря такому расположению электродов, возможно породить течение электрического тока в участке 41, на котором расположено устройство, вдоль направления протяженности мышечного волокна. Каждый электрод из пары электродов 43, по существу, может иметь форму полосы. Например, форма электрода может быть такой, как форма тыквы, с неровностями или изогнутыми участками на окружности, такой как скошенная или трапециевидная форма, содержащая непараллельные противоположные стороны, такой как эллиптическая или продолговатая форма, содержащая эллиптическую дугу или круговую дугу и так далее.
Далее будет рассмотрен угол расположения пары электродов 43 прямоугольной формы. С точки зрения увеличения области, в которой возможно осуществлять электростимуляцию нерва 44s, желательно, чтобы продольное направление пары электродов 43, по существу, располагалось параллельно направлению Х, как показано на фиг. 1. Тем не менее, пара электродов 43 может быть расположена под углом, чтобы соответствовать трехмерной форме мышцы 44m или сустава 41n. В качестве примера, расстояние между парой электродов 43 может быть таким, что оно постепенно уменьшается от одного конца вдоль направления Y по направлению к другому концу. По существу, пара электродов 43 может быть расположена в форме буквы V с отсутствующей вершиной, при этом один конец одного электрода из пары электродов 43 приближается к одному концу другого электрода из пары электродов 43. Если угол, образованный продольными направлениями пары электродов 43, слишком велик, один конец одного электрода из пары электродов 43 слишком сильно приближается к одному концу другого электрода из пары электродов 43, в результате чего возможно неравномерное распределение электрического тока и узкая область, в которой стимулируют нерв 44s. Подтверждено, что в этих случаях получают практическую применимость тогда, когда угол, образованный продольными направлениями пары электродов 43, находится в диапазоне от 90° и меньше.
Далее рассмотрим ширину 43v электродов, которая является шириной электродов в направлении Х. Фактически, пара электродов зафиксирована на изолирующем листе и обернута вокруг, например, полупериметра участка 41, на котором расположено устройство. Пояс или подобное может быть присоединен к листу, чтобы стабильным образом зафиксировать лист на участке 41, на котором расположено устройство. Для этого желательно, чтобы ширина 43v электродов была уменьшена на величину, определенную элементом для соединения пояса. По существу, ширина 43v электродов может быть длиной, полученной вычитанием ширины элемента для соединения пояса из ширины 41w полупериметра участка 41, на котором расположено устройство. Ширина 43v электродов может совпадать с шириной 43w области.
Благодаря приданию формы паре электродов 43 на основе описанного выше, возможно эффективно тренировать несколько мышц 44m, таких как четырехглавая мышца бедра, в широкой области. Благодаря использованию электродов, выполненных так, как описано выше, возможно тренировать мышцу спереди и мышцу сзади участка 41, на котором расположено устройство.
Варианты осуществления изобретения разработаны на основе описанных выше соображений, и далее будет приведена их конкретная конфигурация.
Настоящее изобретение будет описано на основе предпочтительных вариантов осуществления изобретения со ссылками на чертежи. В этих вариантах осуществления изобретения и их модификациях одинаковые или эквивалентные элементы должны быть обозначены одинаковыми ссылочными позициями и, соответственно, должны отсутствовать повторные объяснения. Для облегчения понимания размер элементов на чертежах будет увеличен или уменьшен. Те элементы, которые не участвуют в описании вариантов осуществления изобретения, отсутствуют на чертежах.
Термины, содержащие порядковые числительные, такие как первый и второй, используются для описания набора структурных элементов, но эти термины используются исключительно для отделения одного структурного элемента от другого, и они не должны ограничивать структурные элементы.
Первый вариант осуществления изобретения
Далее со ссылками на фиг. 2А-10 будет описано устройство 10 электростимуляции мышц, соответствующее первому варианту осуществления изобретения. Устройство 10 электростимуляции мышц является устройством для тренировки мышц верхней конечности, таких как бицепс руки и трицепс руки, и мышц нижней конечности, таких как четырехглавая мышца, мышцы задней поверхности бедра и трицепс голени. Далее будет приведено описание примера тренировки мышцы нижней конечности.
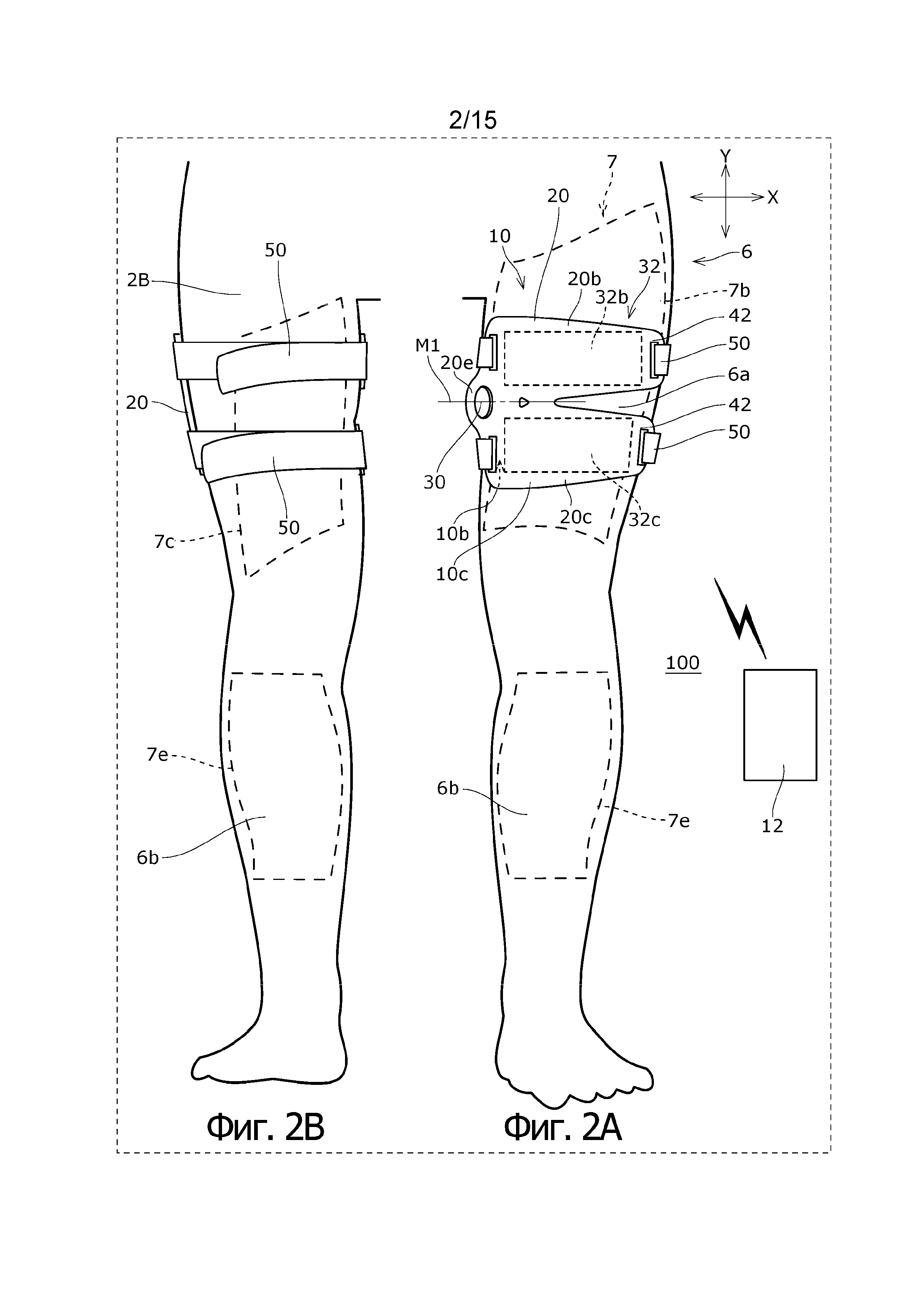
На фиг. 2A и 2В схематично показана тренировочная система 100, которая использует устройство 10 электростимуляции мышц, соответствующее первому варианту осуществления изобретения. Со ссылками на фиг. 2A-2В, на фиг. 2A показана нижняя конечность 6 спереди, а на фиг. 2B нижняя конечность 6 показана сзади. В частности, устройство 10 электростимуляции мышц может быть использовано для передней мышцы 7b верхнего участка 6а ноги, такой как четырехглавая мышца, для задней мышцы 7с верхнего участка 6а ноги, такой как мышца задней поверхности бедра, и для мышцы 7е нижнего участка 6b ноги, такой как трицепс голени. В примере, показанном на фиг. 2A-2B, устройство 10 электростимуляции мышц прикреплено к верхнему участку 6а ноги пользователя для осуществления электростимуляции мышцы 7b. Устройство 10 электростимуляции мышц, соответствующее первому варианту осуществления изобретения, может аналогично использоваться для мышцы 7е нижнего участка 6b ноги.
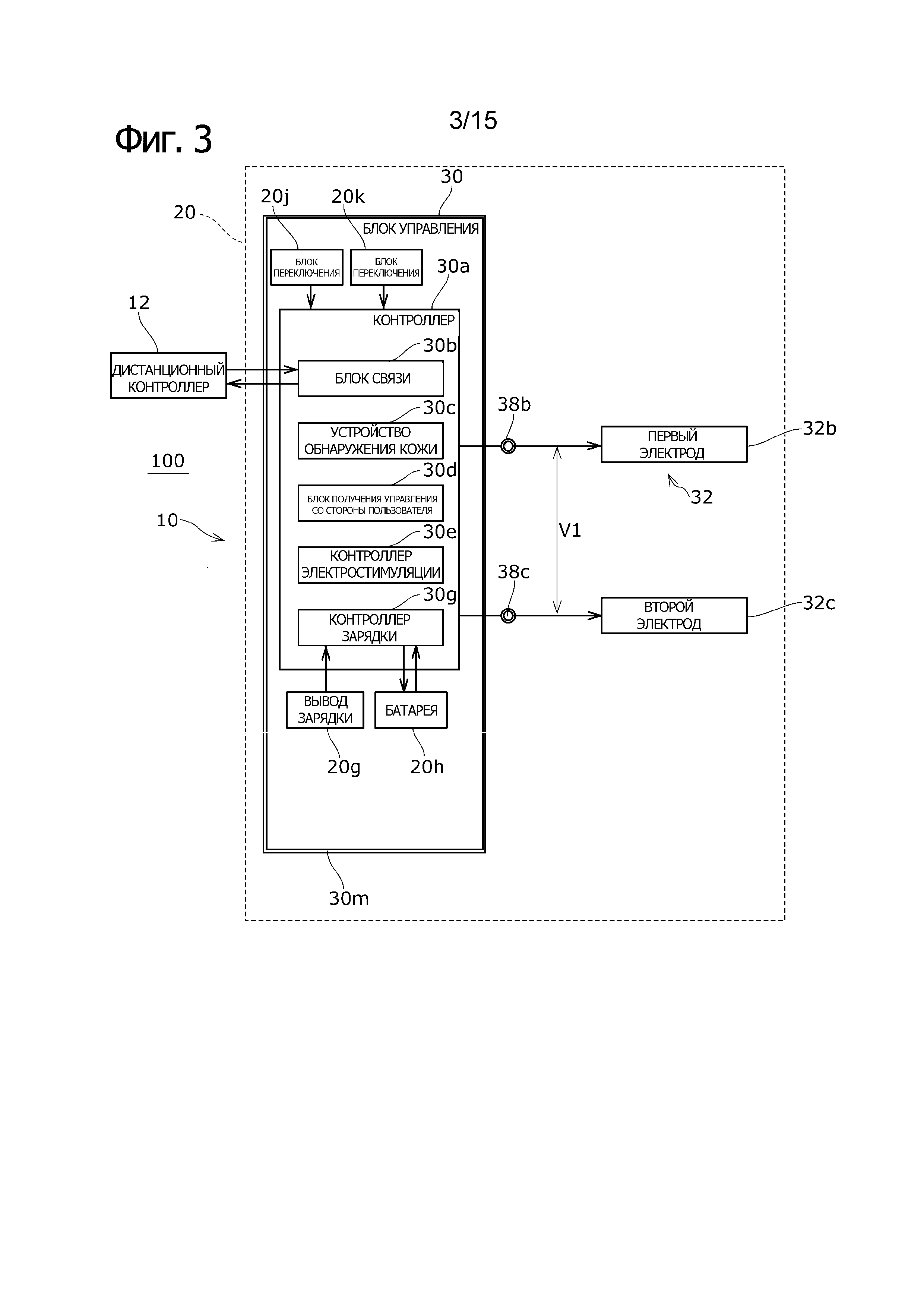
На фиг. 3 показана структурная схема, иллюстрирующая функциональные признаки тренировочной системы 100, в котороей используется устройство 10 электростимуляции мышц. Тренировочная система 100 содержит устройство 10 электростимуляции мышц и дистанционный контроллер 12.
Дистанционный контроллер 12 является любым из множества конечных устройств, которыми управляет пользователь. Например, дистанционный контроллер 12 может быть ПК, планшетом или смартфоном. Дистанционный контроллер 12 управляет работой устройства 10 электростимуляции мышц в соответствии с управлением со стороны пользователя. Дистанционный контроллер 12 принимает от устройства 10 электростимуляции мышц результат определения рабочего состояния. В качестве примера, устройство 10 электростимуляции мышц может передавать информацию об устройстве на дистанционный контроллер 12 с помощью Bluetooth (зарегистрированный товарный знак) или Wi-Fi (зарегистрированный товарный знак) и принимать управляющую информацию пользователя от дистанционного контроллера 12.
Дополнительно, устройство 10 электростимуляции мышц определяет рабочее состояние устройства 10 электростимуляции мышц и подает результат определения на дистанционный контроллер 12 с помощью беспроводного или проводного соединения.
Дистанционный контроллер 12 отображает информацию на сенсорной панели в соответствии с рабочим состоянием, полученным от устройства 10 электростимуляции мышц. Посмотрев на дисплей сенсорной панели дистанционного контроллера 12, пользователь может узнать о рабочем состоянии устройства 10 электростимуляции мышц. Дистанционный контроллер 12 выполнен с возможностью определения управления со стороны пользователя с помощью сенсорной панели. Пользователь может осуществить операцию касания путем легкого однократного касания сенсорной панели своим пальцем или путем смахивания в определенном направлении на сенсорной панели, при этом палец прижат к сенсорной панели. Дистанционный контроллер 12 выполнен с возможностью выработки управляющей информации пользователя на основе операции касания пользователя и передачи этой информации на устройство 10 электростимуляции мышц.
Как показано на фиг. 2A-2В, устройство 10 электростимуляции мышц, соответствующее первому варианту осуществления изобретения, для использования расположено вокруг верхнего участка 6а нижней конечности 6. Устройство 10 электростимуляции мышц содержит поверхность 10b контакта, которая выполнена с возможностью расположения вокруг верхнего участка 6а ноги при ношении устройства 10 электростимуляции мышц. Поверхность 10b контакта продолжается в направлении Х и в направлении Y, которое перпендикулярно направлению Х, когда поверхность 10b контакта разложена вдоль плоской поверхности. Направление Х и направление Y просто определяют ориентацию поверхности 10b контакта. Поверхность 10b контакта может содержать некоторый участок, продолжающийся в направлении, которое наклонено относительно направления Y. Направление, перпендикулярное направлению Х и направлению Y, определяют как направление Z (не показано на фиг. 2A-2B). Направление Z перпендикулярно поверхности 10b контакта.
В примере, показанном на фиг. 2A-2В, устройство 10 электростимуляции мышц надето так, что направление Y поверхности 10b контакта выровнено с направлением протяженности (вертикальное направление) нижней конечности 6, а направление Х поверхности 10b контакта окружает верхний участок 6а ноги. Далее направление Y может быть обозначено как направление вверх или направление вниз, а направление Z может быть обозначено как направление толщины. Определение направлений, приведенное выше, не должно ограничивать ориентацию устройства 10 электростимуляции мышц при его использовании, и устройство 10 электростимуляции мышц может быть использовано в любом направлении.
Устройство 10 электростимуляции мышц содержит основную часть 20 и два поясных элемента 50, которые находятся на некотором расстоянии друг относительно друга в направлении Y. Основную часть 20 направляют вокруг передней или задней части верхнего участка 6а ноги. Поясные элементы 50 располагают от одного конца основной части 20, направляют вокруг задней или передней части верхнего участка 6а ноги в направлении по окружности и соединяют с другим концом основной части 20. Поясные элементы 50 будут описаны ниже.
Основная часть 20 снабжена блоком 30 управления, поясными соединителями 42 и парой электродов 32, которые расположены на некотором расстоянии друг от друга в направлении Y. Блок 30 управления является электронным блоком, выполненным с возможностью подачи напряжения на пару электродов 32 для стимуляции мыщц. Поясные соединители 42 являются элементами для соединения двух поясных элементов 50 с основной частью 20. Пара электродов 32 представляет собой листовые электроды, которые подают на тело напряжение для стимуляции мыщц. Пара электродов 32 содержит первый электрод 32b и второй электрод 32с, которые расположены на некотором расстоянии в направлении Y. В этом примере первый электрод 32b и второй электрод 32с выполнены так, что их продольные направления параллельны направлению Х.
Два элемента 20b, 20c в форме полос, продолжающихся в направлении Х, расположены в направлении Y, так что основная часть 20 в целом, по существу, имеет форму прямоугольника. Основная часть 20 может, по существу, иметь форму квадрата. Два элемента 20b, 20c в форме полос могут быть соединены в некоторых участках и отделены в других участках. Пара поясных соединителей 42 может быть предусмотрена на соответствующих концах каждого из двух элементов 20b, 20c в форме полос в направлении Х.
Блок 30 управления может быть предусмотрен в центре основной части 20 в направлении Y и вблизи одного конца основной части 20 в направлении Х. Центр основной части 20 может быть расположен на прямой линии М1, делящей пополам основную часть 20 в направлении Y и продолжающейся в направлении Х. Блок 30 управления может быть предусмотрен в выступающем участке 20е, который выступает от конца основной части 20 в направлении Х. Основная часть 20 может быть выполнена симметрично относительно блока 30 управления путем включения в ее состав двух элементов 20b, 20c в форме полос. В частности, основная часть 20 может иметь осевую симметрию относительно прямой линии М1. Пара электродов 32 может быть расположена симметрично относительно блока 30 управления. В частности, пара электродов 32 может быть выполнена с осевой симметрией относительно прямой линии М1. Благодаря симметричной форме, как описано выше, устройство 10 электростимуляции мышц, которое используется для верхней конечности или нижней конечности, может быть надлежащим образом использовано для соответствующих участков просто путем изменения ориентации устройства.
В этом примере основная часть 20 прикреплена к верхнему участку 6а ноги. Пара электродов 32 выполнена с возможностью порождения течения электрического тока для осуществления стимуляции в мышце 7b верхнего участка 6а ноги вдоль направления Y. По существу, пара электродов 32 выполнена с возможностью порождения течения электрического тока вдоль окружности в мышце 7b верхнего участка 6а ноги вдоль направления протяженности мышечного волокна.
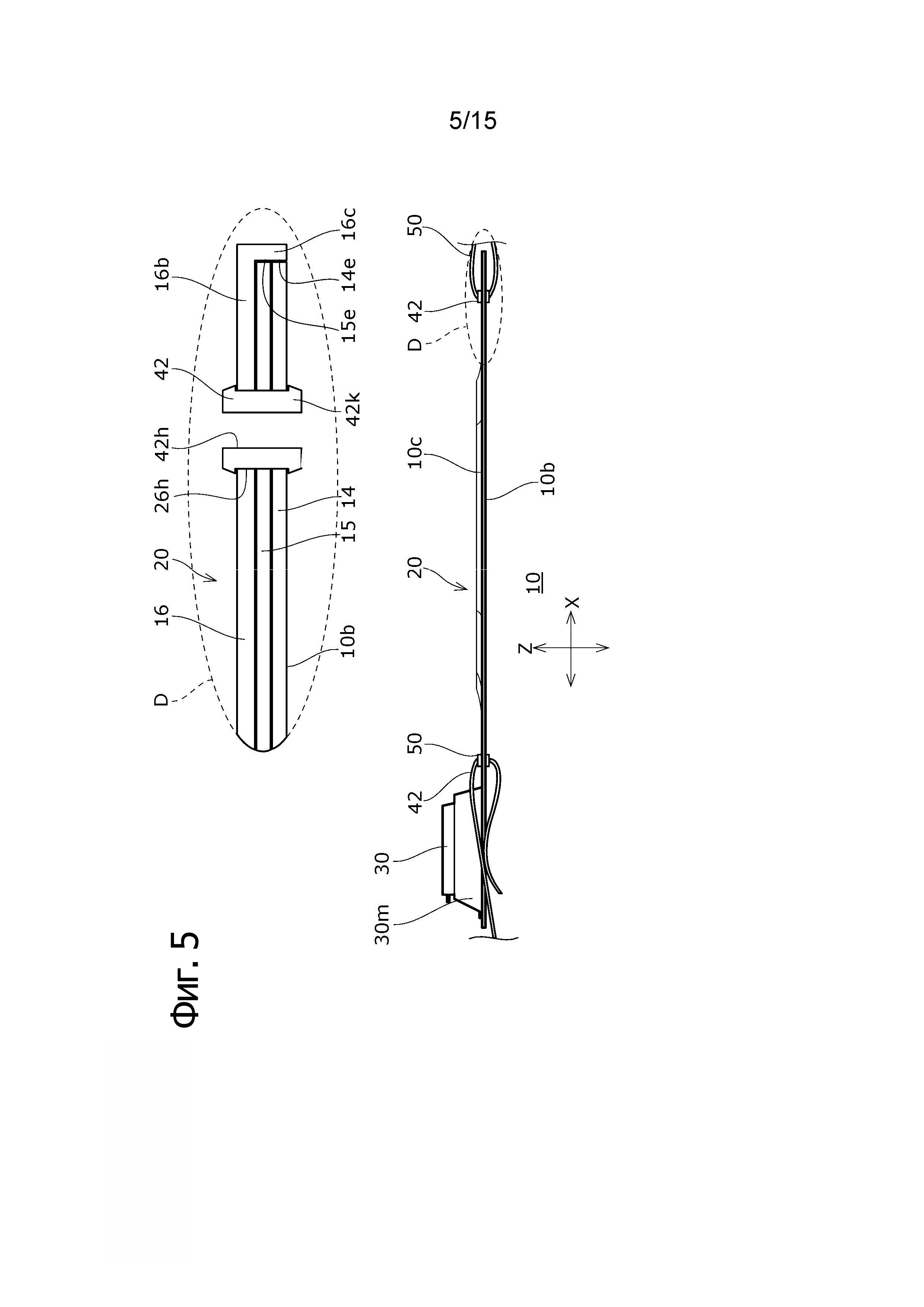
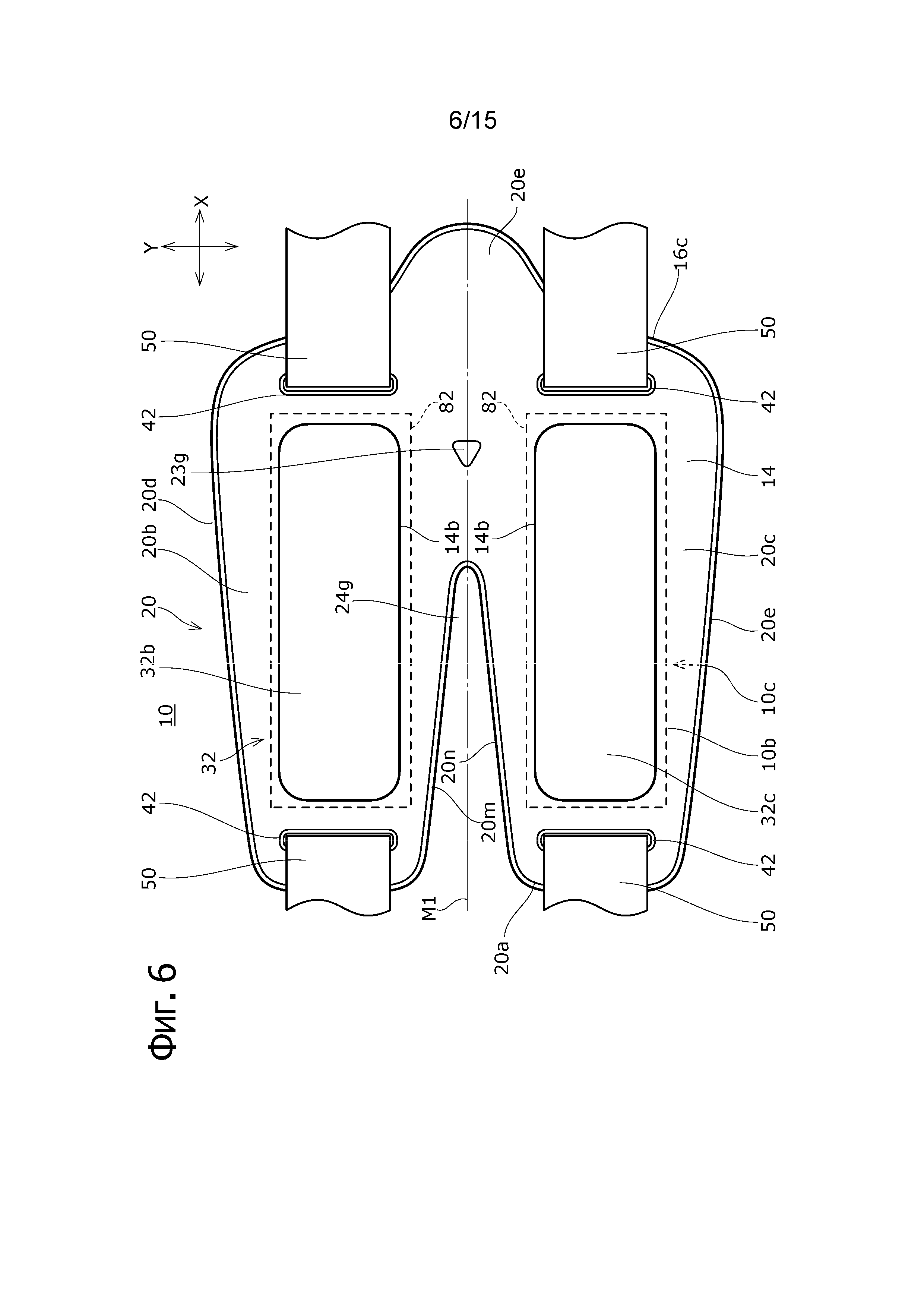
На фиг. 4 показан вид спереди устройства 10 электростимуляции мышц. На фиг. 5 показан вид сверху устройства 10 электростимуляции мышц. На фиг. 6 показан вид сзади устройства 10 электростимуляции мышц. На фиг. 7 показан вид сзади, иллюстрирующий пример расположения проводов 37 устройства 10 электростимуляции мышц. На фиг. 4-7 показаны виды спереди поверхности 10b контакта соответствующих блоков, благодаря раскладыванию устройства 10 электростимуляции мышц. Как показано на фиг. 4-7, направление X, которое соответствует направлению по окружности нижней конечности 6, и направление Y, которое соответствует вертикальному направлению нижней конечности 6, обозначены прямыми линиями Х и Y со стрелками в разложенном состоянии.
Основная часть
Основная часть 20 может содержать многослойную структуру. В качестве примера, основная часть 20 содержит первый основной элемент 14, второй основной элемент 15 и закрывающий элемент 16. Первый основной элемент 14 является элементом, который выполнен с возможностью расположения на нижней конечности 6, и в разложенном положении он имеет форму плоского листа. Поверхность 10b контакта, которая контактирует с верхним участком 6а ноги, расположена на задней поверхности первого основного элемента 14. Первый основной элемент 14 содержит отверстие 14b, которое открывает пару электродов 32 на поверхности 10b контакта. Первый основной элемент 14 может быть выполнен путем объединения нескольких элементов. Стойкость проводов 37 устройства 10 электростимуляции мышц из этого примера обеспечивается большей по сравнению с ситуацией, когда не предусмотрен первый основной элемент 14.
Второй основной элемент 15 является элементом, поддерживающим пару электродов 32 и проводов 37, и в разложенном состоянии имеет форму плоского листа. Второй основной элемент 15 может быть выполнен с возможностью объединения нескольких элементов. Второй основной элемент 15 из этого примера выполнен так, что объединены участки, соответствующие основной части 20. Задняя поверхность второго основного элемента 15 снабжена парой электродов 32. Например, пара электродов 32 может быть выполнена путем печати электропроводного материала, такого как серебряная паста. Пара электродов 32 может быть выполнена путем травления. Второй основной элемент 15 снабжен проводами 37, которые электрически соединены с парой электродов 32. Например, провода 37 могут быть выполнены путем печати электропроводного материала, такого как серебряная паста. Провода 37 могут быть выполнены путем травления. Провода 37 могут быть проводной схемой.
Закрывающий элемент 16 является элементом, расположенным на стороне второго основного элемента 15, противоположно первому основному элементу 14. Закрывающий элемент 16 содержит листовой участок 16b, в разложенном состоянии имеющий форму плоского листа, и краевой закрывающий участок 16с, продолжающийся в направлении толщины (направление Z) от внешнего края листового участка 16b по направлению ко второму основному элементу 15. Внешний поверхностный участок 10с листового участка 16b закрывающего элемента 16 снабжен блоком 30 управления. Закрывающий элемент 16 может быть выполнен путем объединения нескольких элементов. Закрывающий элемент 16 из этого примера выполнен с возможностью закрывания основной части 20 с целью объединения.
Благодаря тому, что первый основной элемент 14 и второй основной элемент 15 выполнены тонкими, их внешние края 14е и 15е также будут тонкими. Когда устройство 10 электростимуляции мышц надето на нижней конечности 6, внешние края 14е, 15е могут контактировать с нижней конечностью 6, вызывая у пользователя дискомфортное тактильное ощущение. Чтобы избежать этого, закрывающий элемент 16 из этого примера содержит краевой закрывающий участок 16с, который закрывает внешние края 14е, 15е первого основного элемента 14 и второго основного элемента 15. В соответствии с этой конфигурацией, краевой закрывающий участок 16с закрывает внешние края 14е, 15е, так что увеличивается площадь контакта между основной частью 20 и нижней конечностью 6 и улучшается тактильное ощущение пользователя при ношении устройства. Краевой закрывающий участок 16с из этого примера имеет форму полоски, окружающей внешние края 14е, 15е. Обеспечивается большая жесткость закрывающего элемента 16 из этого примера по сравнению с ситуацией, когда не предусмотрен краевой закрывающий участок 16с. Кроме того, когда устройство 10 электростимуляции мышц надето на тело, внешние края 14е, 15е могут врезаться в кожу. Благодаря краевому закрывающему участку 16с, могут быть уменьшены влияние на кожу и боль в ней.
Этот вариант осуществления изобретения не ограничивает материал первого основного элемента 14 и второго основного элемента 15. Для указанной цели может подойти любой изолирующий материал, который достаточно гибок, чтобы его обернули вокруг нижней конечности 6. Первый основной элемент 14 и второй основной элемент 15 из этого примера выполнены из эластомера, такого как полимер на основе полиэтилентерефталата. Этот вариант осуществления изобретения не ограничивает материал закрывающего элемента 16. Для указанной цели может подойти любой изолирующий материал, который достаточно гибок, чтобы его обернули вокруг нижней конечности 6. В качестве примера, закрывающий элемент 16 может быть выполнен из полимерного материала, который тверже материала первого основного элемента 14 и второго основного элемента 15. Закрывающий элемент 16 из этого примера выполнен из эластомера, такого как силиконовый полимер. В этом случае закрывающий элемент 16 защищает первый основной элемент 14 и второй основной элемент 15, предотвращает их повреждение при обращении и способен придать основной части 20 подходящую жесткость. Благодаря использованию устройства 10 электростимуляции мышц, температура тела передается силиконовому полимеру и там сохраняется. Следовательно, пользователь может ощущать тепло при использовании устройства, и ожидается, что благодаря гипертермическому действию улучшается циркуляция крови.
Например, основная часть 20 расположена относительно нижней конечности 6 так, что основная часть 20 выровнена с мышцей 7b верхнего участка 6а ноги. Основная часть 20 продолжается в направлении Х и направлении Y и выполнена тонкой в направлении Z. Основная часть 20 снабжена парой электродов 32, которые расположены на некотором расстоянии друг от друга в направлении Y. Как описано выше, пара электродов 32 выполнена с возможностью порождения течения электрического тока в мышце 7b верхнего участка 6а ноги в направлении, которое перпендикулярно направлению по окружности. Основная часть 20 имеет форму, которая, по существу, считается прямоугольной, в которой продольное направление выровнено в направлении Х на виде спереди. Здесь и далее, форма, которую, по существу, можно считать прямоугольной, может быть формой, в которой пара противоположных сторон имеет длину, составляющую 30% или больше от общей длины.
Пространство между устройством 10 электростимуляции мышц и верхним участком 6а ноги может стать влажным из-за пота, выделяющегося во время тренировки. Для решения этой проблемы основная часть 20 из этого примера снабжена одним или несколькими вентиляционными отверстиями 23g, которые выполнены в местах, которые находятся на некотором расстоянии от пары электродов 32. Как показано на фиг. 4, вентиляционные отверстия 23g размещены в местах, расположенных на некотором расстоянии от электродов и проводов. В этом случае влаги между устройством 10 электростимуляции мышц и верхним участком 6а ноги меньше по сравнению с конфигурацией, при которой не предусмотрены вентиляционные отверстия. Дополнительное преимущество от размещения вентиляционных отверстий 23g заключается в увеличении гибкости основной части 20. С помощью изменения количества и расположения вентиляционных отверстий 23g можно регулировать гибкость основной части 20.
Во многих случаях поверхность по окружности верхнего участка 6а ноги имеет форму конической поверхности с радиусом кривизны, который постепенно увеличивается по направлению к основанию. По этой причине, в некоторых участках основной части 20 образуются складки при расположении основной части на верхнем участке 6а ноги, если основная часть 20 не снабжена участком разветвления. Когда образуются складки, пара электродов 32 может быть наклонена относительно поверхности по окружности верхнего участка 6а ноги, участки электродов 32 могут быть подняты и контакт может стать нестабильным. По этой причине участок основной части 20 в направлении Х может разделиться в направлении Y на несколько участков, чтобы соответствовать разным радиусам кривизны. В качестве примера, основная часть 20 имеет разветвляющуюся форму, в которой участок в направлении Х разветвляется в направлении Y и создается промежуток 24g. По существу, основная часть 20 содержит два элемента 20b, 20c в форме полос, которые разделены промежутком 24g. Край 20m элемента 20b в форме полосы прилегает к промежутку 24g. Край 20n элемента 20c в форме полосы прилегает к промежутку 24g. По существу, промежуток 24g является областью, расположенной между краями 20m, 20n в направлении Y. Два элемента 20b, 20c в форме полос соединены в некоторой части, но отделены в другой части. Каждый элемент из элементов 20b, 20с в форме полос из этого примера имеет форму полосы, размер которой в направлении Х больше размера в направлении Y. Промежуток 24g выполнен направленным внутрь в направлении Х от конца 20а основной части 20 в направлении Х.
Основная часть 20 из этого примера выполнена с осевой симметрией относительно прямой линии, продолжающейся в направлении Х через центр промежутка 24g в направлении Y. В этом примере пара электродов 32 предусмотрена в соответствующих областях, которые отделены промежутком 24g основной части 20. Элементы 20b, 20с в форме полос, которые разделены промежутком 24g основной части 20, независимо охватывают окружность верхнего участка 6а ноги, так что вряд ли будут образовываться складки, и контакт с телом может быть стабилизирован. Разветвляющаяся форма позволяет независимо изгибаться элементам 20b, 20с в форме полос и уменьшает складки при наличии изменения толщины, как в верхнем участке 6а ноги. Размер промежутка 24g в направлении Y, который является глубиной выреза разветвляющейся формы, может быть большим, если устройство подлежит расположению на верхнем участке нижней конечности, и может быть малым, если устройство подлежит расположению на верхней конечности.
Если блок 30 управления расположен снаружи на теле, с большой вероятностью блок 30 управления повредят из-за столкновения, например, с ножкой стола при перемещении пользователя. Для решения указанной проблемы, устройство 10 электростимуляции мышц из этого примера выполнено так, чтобы блок 30 управления мог быть расположен на теле направленным внутрь, когда устройство 10 электростимуляции мышц расположено или спереди, или сзади верхнего участка 6а ноги. Более конкретно, основная часть 20 выполнена симметрично относительно блока 30 управления. На фиг. 8 схематично показано устройство 10 электростимуляции мышц, расположенное в задней части верхнего участка 6а ноги. Устройство 10 электростимуляции мышц в состоянии, показанном на фиг. 8, может тренировать мышцу 7с, находящуюся сзади верхнего участка 6а ноги. В этом примере основная часть 20 выполнена с возможностью расположения перевернутой относительно случая, показанного на фиг. 2. Благодаря такому расположению основной части 20, блок 30 управления расположен на теле направленным внутрь, так что уменьшается вероятность столкновения блока 30 управления, например, с ножкой стола и, соответственно, повреждения.
Далее будет снова сделана ссылка на фиг. 2-7. При наличии участка разветвления, разделяющегося промежутком 24g, напряжение может быть сконцентрировано в участке основной части 20, прилегающем к нижней части промежутка 24g, что может привести к такой проблеме, как трещина в этом участке. Для решения указанной проблемы, участок основной части 20 из этого примера, прилегающий к нижней части промежутка 24g, содержит толстый участок 24h, выполненный более толстым по сравнению с другими местами. В частности, толстый участок 24h может быть предусмотрен вокруг участка основной части 20, который прилегает к низу промежутка 24g. Форма толстого участка 24h может быть определена с помощью моделирования в соответствии с требуемой стойкостью.
Провода
Как показано на фиг. 7, провода 37 из этого примера предусмотрены на задней поверхности 15b второго основного элемента 15. Провода 37 содержат провод 37b и провод 37с. Провод 37b электрически соединяет вывод 38b и первый электрод 32b. Провод 37с электрически соединяет вывод 38с и второй электрод 32с.
Пара электродов
Как описано выше, пара электродов 32 содержит первый электрод 32b и второй электрод 32с, которые расположены на некотором расстоянии в направлении Y. Продольное направление каждого электрода из пары электродов 32 расположено параллельно направлению Х. Каждый электрод из пары электродов 32 имеет форму полосы, протяженность которой в направлении Х больше протяженности в направлении Y. Каждый электрод из пары электродов 32, по существу, может иметь форму полосы. Например, форма электрода может быть такой, как форма тыквы, с неровностями или изогнутыми участками на окружности, такой как скошенная или трапециевидная форма, содержащая непараллельные противоположные стороны, такой как эллиптическая или продолговатая форма, содержащая эллиптическую дугу или круговую дугу и так далее. В этом примере каждый из электродов 32, по существу, имеет прямоугольную форму. Каждый электрод из пары электродов 32 расположен протяженным в направлении Х, которое является направлением по окружности верхнего участка 6а ноги, и порождает течение электрического тока в направлении Y в мышце 7b верхнего участка 6а ноги. Пара электродов 32 предусмотрена на втором основном элементе 15 и открыта на поверхности 10b контакта из отверстия 14b в первом основном элементе 14. Первый электрод 32b электрически соединен с выводом 38b с помощью провода 37b, а второй электрод 32с электрически соединен с выводом 38с с помощью провода 37с.
Когда устройство 10 электростимуляции мышц расположено на теле для использования, гелевая подушка 82 (смотри фиг. 6) расположена между электродами и телом. Гелевая подушка 82 является клейкой. Благодаря своей клейкости, гелевая подушка 82 играет роль обеспечения проводимости между телом и каждым электродом. Гелевую подушку 82 приклеивают к каждому электроду устройства 10 электростимуляции мышц. Устройство 10 электростимуляции мышц выполнено с возможностью расположения на теле с приклеенной гелевой подушкой 82. Устройство 10 электростимуляции мышц поддерживается на теле с помощью клейкости гелевой подушки 82. В этом примере, гелевая подушка 82 приклеена на каждый электрод из пары электродов 32 для использования, как показано на фиг. 6.
Блок управления
Далее будет приведено описание блока 30 управления. Структурные элементы блока 30 управления, показанного на фиг. 3, и структурные элементы блока 70 управления, описанного ниже, могут быть реализованы в виде аппаратного обеспечения, такого как устройства или механические компоненты, например, с помощью центрального обрабатывающего блока (CPU) компьютера, и в виде программного обеспечения, такого как компьютерная программа и так далее. На фиг. 3 показаны функциональные блоки, реализованные с помощью взаимодействия этих элементов. Следовательно, специалистам в рассматриваемой области после прочтения настоящего описания ясно, что функциональные блоки могут быть реализованы разными способами с помощью комбинации аппаратного обеспечения и программного обеспечения.
Блок 30 управления содержит контроллер 30a, блоки 20j и 20k переключения, вывод 20g зарядки и батарею 20h, которые расположены в корпусе 30m. Корпус 30m расположен в центре основной части 20 и выполнен в виде внешней оболочки блока 30 управления. Корпус 30m может быть выполнен из различных полимерных материалов. Блоки 20j, 20k переключения расположены спереди блока 30 управления. Блоки переключения могут быть обозначены как SW блоки. Блоки 20j, 20k переключения определяют, что пользователь удерживает переключатель нажатым и выводят результат определения на контроллер 30а. Блоки 20j, 20k переключения могут содержать электрический контакт, который замкнут, когда переключатель не удерживают нажатым, и разомкнут, когда переключатель удерживают нажатым. Поверхность блока 20j переключателя из этого примера обозначена знаком плюса, а поверхность блока 20k переключателя из этого примера обозначена знаком минус.
Батарея 20h электрически соединена с контроллером 30a и подает электрическую энергию на контроллер 30a. Батарея 20h может являться батареей первичных элементов. В этом примере используется перезаряжаемая литий-ионная батарея. Батарея 20h может быть заменяемой, но в этом примере применяется встроенная батарея. Вывод 20g зарядки принимает электрическую энергию для заряда батареи 20h и выводит электрическую энергию на контроллер 30а. В качестве вывода 20g зарядки могут быть использованы разные соединительные устройства. В этом примере используется соединительное устройство USB (зарегистрированный товарный знак). Например, вывод 20g зарядки расположен на нижней поверхности блока 30 управления. Батарею 20h заряжают электрической энергией, принятой выводом 20g зарядки. Батарея 20h может быть выполнена с возможностью подзаряда с помощью системы зарядки неконтактного типа, такой как беспроводная система зарядки.
Контроллер 30a содержит блок 30b связи, устройство 30с обнаружения кожи, блок 30d получения управления со стороны пользователя, контроллер 30е электростимуляции и контроллер 30g зарядки. Блок 30b связи выполнен с возможностью передачи рабочего состояния устройства 10 электростимуляции мышц на дистанционный контроллер 12. Дистанционный контроллер 12 показывает рабочее состояние, полученное от блока 30b связи. Блок 30b связи получает управляющую информацию пользователя на основе операции касания, введенной в дистанционном контроллере 12. Контроллер 30а управляет работой устройства 10 электростимуляции мышц в соответствии с управляющей информации пользователя, полученной с помощью блока 30b связи.
Блок 30d получения управления со стороны пользователя получает результат определения из блоков 20j, 20k переключения. Блок 30d получения управления со стороны пользователя определяет напряжение, соответствующее сопротивлению блока переключения. Если определенное напряжение равно или больше некоторого порогового значения, блок 30d получения управления со стороны пользователя определяет, что блок переключения удерживается нажатым. Если определенное напряжение меньше упомянутого порогового значения, блок 30d получения управления со стороны пользователя определяет, что блок переключения не удерживается нажатым. Контроллер 30а определяет способ управления устройством 10 электростимуляции мышц в соответствии с комбинацией состояний блоков переключения, указывающих, удерживается ли нажатым переключатель, и в соответствии с длительностью нажатия блока переключения.
Управление со стороны пользователя с помощью блоков 20j, 20k переключения может быть запрещено, когда осуществляются действия с дистанционным контроллером 12. Устройство 10 электростимуляции мышц из этого примера выполнено так, что управление со стороны пользователя с помощью блоков 20j, 20k переключения возможно, когда осуществляются действия с дистанционным контроллером 12. В этом случае пользователь может управлять устройством 10 электростимуляции мышц с помощью блоков 20j, 20k переключения даже тогда, когда пользователь находится далеко от дистанционного контроллера 12 и не может использовать дистанционный контроллер 12 для управления.
Устройство 30с обнаружения кожи определяет, контактируют ли электроды с кожей. Устройство 30с обнаружения кожи определяет сопротивление между парой электродов 32. Устройство 30с обнаружения кожи решает, что электроды контактируют с кожей, когда определенное сопротивление меньше некоторого порогового значения, и решает, что электроды не контактируют с кожей, когда определенное сопротивление больше или равно указанному пороговому значению.
Когда устройство 30с обнаружения кожи определяет, что электроды контактируют с кожей, контроллер 30е электростимуляции подает на пару электродов 32 электрическую энергию, соответствующую предварительно заданному выходному напряжению в течение заранее заданного промежутка времени работы (например, 20 минут) и с заранее заданным интервалом. По существу, верхний участок 6а ноги пользователя электрически стимулируют в течение упомянутого промежутка времени работы. Выходное напряжение может быть изменено с помощью дистанционного контроллера 12 или блоков 20j, 20k переключения. Выходное напряжение в контроллере 30е электростимуляции из этого примера повышается каждый раз, когда удерживают нажатым блок 20j переключения, и падает каждый раз, когда удерживают нажатым блок 20k переключения.
Контроллер 30g зарядки управляет электрической энергией для зарядки, принятой выводом 20g зарядки, и подает электрическую энергию на батарею 20h. Контроллер 30g зарядки управляет величиной электрического тока, подаваемого на батарею 20h в соответствии со скоростью зарядки батареи 20h. Например, если скорость зарядки мала, контроллер 30g зарядки увеличивает электрический ток, подаваемый на батарею 20h. Если скорость зарядки велика, контроллер 30g зарядки уменьшает электрический ток, подаваемый на батарею 20h. Если граница увеличения скорости зарядки мала в сравнении с величиной накопленного заряда, то определяют, что батарея вышла из строя и батарея больше не заряжается.
Поясные соединители
Основная часть 20 снабжена парой поясных соединителей 42 для соединения поясных элементов 50 с двумя элементами 20b, 20с в форме полос соответственно. На фиг. 9 показан вид сверху, иллюстрирующий пример двух поясных элементов 50, соединенных с устройством 10 электростимуляции мышц. Для простоты понимания на фиг. 9 показана основная часть 20, продолжающаяся в направлении Х, и показан верхний участок 6а ноги, масштаб которого уменьшен по сравнению с фактическим масштабом. Один конец 50b пояса поясных элементов 50 соединен с одним соединителем из пары поясных соединителей 42, а основная часть 20 обернута вокруг верхнего участка 6а ноги, который является участком, на котором расположено устройство. В этом состоянии другой конец пояса из поясных элементов 50 соединен с другим соединителем из пары поясных соединителей 42. Более конкретно, концы пояса поясных элементов 50, направленных вокруг некоторого участка верхнего участка 6а ноги, соответствуют паре поясных соединителей 42.
Желательно, чтобы устройство 10 электростимуляции мышц можно было легко прикрепить к телу. Для решения указанной задачи, когда один конец 50b пояса поясных элементов 50 соединен с одним соединителем из пары поясных соединителей 42 и основная часть 20 обернута вокруг участка, на котором расположено устройство, другой соединитель из пары поясных соединителей 42 расположен в области, в которой другой конец пояса поясных элементов 50 может быть направлен через другой соединитель из пары поясных соединителей 42. Более конкретно, пара поясных соединителей 42 предусмотрена в каждом из двух элементов 20b, 20с в форме полос, и они находятся на некотором расстоянии друг от друга в направлении Х. Когда основная часть 20 обернута в направлении Х, пара поясных соединителей 42 выровнена с направлением Х. По этой причине другой конец пояса поясных элементов 50, соединенный с одним соединителем из поясных соединителей 42, автоматически расположен на другом соединителе из пары поясных соединителей 42, так что пояс может быть легко соединен с поясными соединителями 42.
Поясные соединители 42 содержат пару прямоугольных трубчатых элементов 42k. Каждый из прямоугольных трубчатых элементов 42k является прямоугольным трубчатым элементом, окружающим отверстие 42а, через которое направляют пояс поясных элементов 50. Каждый из прямоугольных трубчатых элементов 42k, по существу, имеет форму, предоставляющей собой прямоугольник, продолжающийся продольно в направлении Y на виде спереди. По существу прямоугольное отверстие 42h, вытянутое в направлении Y, расположено в центре. Прямоугольные трубчатые элементы 42k могут быть выполнены, в качестве примера, из некоторого полимерного материала. Пара прямоугольных трубчатых элементов 42k предусмотрена в каждом из двух элементов 20b, 20с в форме полос и они находятся на некотором расстоянии друг от друга в направлении Х. Благодаря использованию прямоугольных трубчатых элементов 42k, силу от поясных элементов 50 принимают прямоугольные трубчатые элементы 42k. Следовательно, нагрузка, действующая на закрывающий элемент 16, распределяется и препятствует возникновению расслоения или деформации внешнего вида поясных элементов 50 по сравнению со случаем, когда не предусмотрены прямоугольные трубчатые элементы 42k. Кроме того, может быть сдержано перемещение многослойной структуры первого основного элемента 14, второго основного элемента 15 и закрывающего элемента 16.
Поясные элементы
В качестве поясных элементов могут быть использованы различным образом выполненные элементы. Например, поясные элементы могут быть выполнены в виде шнура, полосы и так далее. Поясные элементы из этого примера являются элементами в форме полос, которые выполнены из ткани и на обеих поверхностях которых находятся липучки.
В этом примере один из пары прямоугольных трубчатых элементов 42k снабжен крепежным элементом 50с. Пояс поясных элементов 50 соединяет другой элемент из пары прямоугольных трубчатых элементов 42k и крепежный элемент 50с. В этом примере крепежный элемент 50с является элементом в форме полосы, который выполнен из ткани и содержащий липучку. Крепежный элемент 50с проходит через отверстие 42h одного элемента из прямоугольных трубчатых элементов 42k и затем загибается назад. Концы крепежного элемента 50с соединены вместе с помощью липучки 51b. Крепежный элемент 50с может быть выполнен более коротким по сравнению с поясом поясных элементов 50.
Один конец пояса поясных элементов 50 проходит через отверстие 42h другого элемента из прямоугольных трубчатых элементов 42k и загибается назад. Конец, который загнут назад, соединен с промежуточным участком пояса поясных элементов 50 с помощью липучки 51c. Другой конец пояса поясных элементов 50 загнут назад для регулировки длины (здесь и далее называется загнутым назад участком 50е). Загнутый назад участок 50е, который является другим концом пояса поясных элементов 50, соединен с другим промежуточным участком пояса поясных элементов 50 с помощью липучки 51d.
Загнутый назад участок 50е выполнен с возможностью соединения с крепежным элементом 50с с помощью липучки 51е. Устройство 10 электростимуляции мышц располагают вокруг верхнего участка 6а ноги пользователя, когда загнутый назад участок 50е откреплен от второго поясного элемента 50с. Устройство 10 электростимуляции мышц располагают на верхнем участке 6а ноги благодаря соединению загнутого назад участка 50е с крепежным элементом 50с, когда устройство 10 электростимуляции мышц расположено вокруг окружности верхнего участка 6а ноги. Благодаря изменению положения загиба загнутого назад участка 50е, может быть легко отрегулирована длина по окружности.
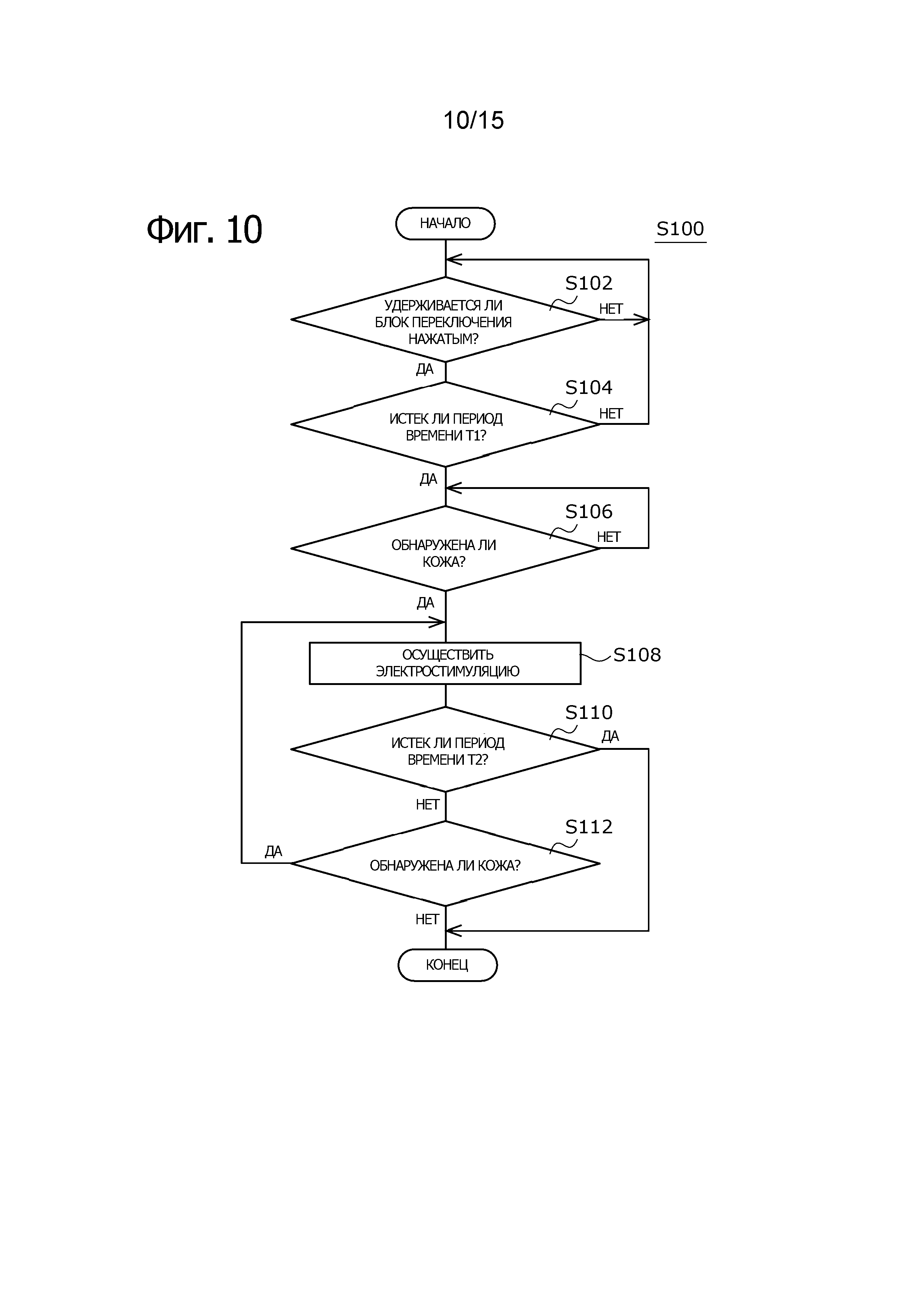
Далее будет описана работа устройства 10 электростимуляции мышц, выполненного так, как описано выше. На фиг. 10 показана блок-схема, иллюстрирующая пример работы устройства 10 электростимуляции мышц. На фиг. 10 показан процесс S100, который начинают с включения электропитания, при этом на верхнем участке 6а ноги пользователя надето устройство 10 электростимуляции мышц, указанный процесс описан от начала электростимуляции верхнего участка 6а ноги до окончания электростимуляции.
Когда процесс начат, контроллер 30а определяет, удерживается ли нажатым блок 20j переключения (этап S102). Если блок 20j переключения не удерживается нажатым (НЕТ на этапе S102), контроллер 30а возвращает управление на этап S102 и повторяет этап S102. Если блок 20j переключения удерживается нажатым (ДА на этапе S102), контроллер 30а определяет, истек ли заранее заданный период Т1 времени (этап S104).
Если заранее заданный период Т1 времени не истек (НЕТ на этапе S104), то контроллер 30а возвращает управление на этап S102 и повторяет этапы S102 - S104. Если заранее заданный период Т1 времени истек (ДА на этапе S104), то контроллер 30а переходит на этап S106. Период Т1 времени на этапе S104 может быть определен в соответствии с желаемой спецификацией. В этом примере период Т1 времени определен равным 2 секундам. По существу, пользователь может включить устройство 10 электростимуляции мышц путем удерживания блока 20j переключения нажатым в течение 2 секунд.
На этапе S106 контроллер 30а определяет, контактируют ли электроды с кожей (этап S106). Если электроды не контактируют с кожей (НЕТ на этапе S106), контроллер 30а возвращает процесс на этап S106 после ожидания в течение заранее заданного периода времени.
Если электроды контактируют с кожей (ДА на этапе S106), контроллер 30а начинает осуществлять электростимуляцию верхнего участка 6а ноги (этап S108). На этом этапе, контроллер 30е электростимуляции подает изменяющуюся электрическую энергию в течение заранее заданного интервала на пару электродов 32.
Контроллер 30a, после осуществления этапа S108, определяет, истек ли заранее заданный период Т2 времени (этап S110). Период Т2 времени на этапе S110 может быть определен в соответствии с желаемым временем тренировки. В этом примере период Т2 времени определен равным 20 минутам. По существу, пользователь может продолжить тренировку до истечения 20 минут. Если заранее заданный период Т2 времени не истек (НЕТ на этапе S110), контроллер 30а определяет, контактируют ли электроды с кожей (этап S112).
Если электроды контактируют с кожей (ДА на этапе S112), контроллер 30а возвращает процесс на этап S108 и продолжает осуществлять электростимуляцию. Если электроды не контактируют с кожей (НЕТ на этапе S112), контроллер 30а прерывает электростимуляцию и заканчивает процесс S100. По существу, контроллер 30а прерывает электростимуляцию при откреплении электродов от тела 2, даже если не истек период Т2 времени. Если заранее заданный период Т2 времени истек (ДА на этапе S112), контроллер 30а прерывает электростимуляцию и заканчивает процесс S100.
Процесс S100 является только примером, и могут быть добавлены другие этапы, или этапы могут быть удалены или модифицированы, или последовательность этапов может быть изменена.
Далее будет описаны достоинства устройства 10 электростимуляции мышц, соответствующего описанному выше первому варианту осуществления изобретения.
Устройство 10 электростимуляции мышц, соответствующее первому варианту осуществления изобретения, содержит основную часть 20 с поверхностью 10b контакта, которая выполнена с возможностью расположения вокруг участка нижней конечности или верхней конечности, на котором расположено устройство. Поверхность 10b контакта продолжается в направлении Х, окружая участок, на котором расположено устройство, и в направлении Y, которое перпендикулярно направлению Х. Основная часть 20 снабжена парой электродов 32, которые расположены на некотором расстоянии друг от друга в направлении Y. Каждый электрод из пары электродов 32 имеет форму полосы, протяженность которой в направлении Х больше протяженности в направлении Y, и выполнен с возможностью порождения течения электрического тока в участке, на котором расположено устройство, вдоль направления протяженности мышечного волокна в участке, на котором расположено устройство. В соответствии с этой конфигурацией, протяженность электродов в направлении Х сравнительно велика, так что они могут стимулировать мышцу в большой области в направлении Х. Кроме того, так как протяженность электродов в направлении Y сравнительно мала, может быть сдержан электрический ток, текущий в теле, и может быть увеличен срок службы батареи, в течение которого батарея способна порождать течение электрического тока, по сравнению с ситуацией, когда указанная протяженность велика. Порождение течения электрического тока в направлении Y в участке, к которому прикреплено устройство, позволяет электрическому току течь в направлении протяженности мышцы. Таким образом, можно эффективно стимулировать нерв, который управляет мышцей, и можно эффективно тренировать мышцу. Это позволяет эффективно стимулировать мышцу с помощью электрического тока.
В устройстве 10 электростимуляции мышц, которое соответствует первому варианту осуществления изобретения, продольные направления пары электродов 32 расположены, по существу, параллельно друг другу. В соответствии с этой конфигурацией, может быть стимулирован более широкая область мышцы в участке, на котором расположено устройство.
В устройстве 10 электростимуляции мышц, которое соответствует первому варианту осуществления изобретения, основная часть 20 снабжена вентиляционными отверстиями 23g, которые выполнены в положениях, находящихся на некотором расстоянии от пары электродов 32. В соответствии с этой конфигурацией, влаги между устройством 10 электростимуляции мышц и верхним участком 6а ноги меньше по сравнению с конфигурацией, в которой не предусмотрены вентиляционные отверстия.
В устройстве 10 электростимуляции мышц, которое соответствует первому варианту осуществления изобретения, основная часть 20 содержит первый основной элемент 14, второй основной элемент 15 и закрывающий элемент 16. Первый основной элемент 14 содержит отверстие 14b, которое открывает пару электродов 32. Второй основной элемент 15 снабжен парой электродов 32. Закрывающий элемент 16 расположен на стороне второго основного элемента 15, противоположно первому основному элементу 14. В соответствии с этой конфигурацией, улучшена стойкость проводов 37 по сравнению с ситуацией, когда не предусмотрен первый основной элемент 14.
В устройстве 10 электростимуляции мышц, которое соответствует первому варианту осуществления изобретения, основная часть 20 имеет разветвляющуюся форму, в которой участок в направлении Х разветвляется в направлении Y с помощью промежутка 24g. Участок основной части 20, прилегающий к промежутку 24g, содержит толстый участок 24h, выполненный более толстым по сравнению с другими местами.
В соответствии с этой конфигурацией, улучшена прочность участка, прилегающего к промежутку 24g, минимизированы такие проблемы, как трещины, и улучшена стойкость.
В устройстве 10 электростимуляции мышц, которое соответствует первому варианту осуществления изобретения, основная часть 20 снабжена парой поясных соединителей 42 для крепления поясных элементов 50. Когда один конец 50b пояса поясных элементов 50 соединен с одним соединителем из пары поясных соединителей 42 и основная часть 20 обернута вокруг участка, на котором расположено устройство, другой соединитель из пары поясных соединителей 42 расположен в области, в которой загнутый назад участок 50е пояса поясных элементов 50 может быть направлен через другой соединитель из пары поясных соединителей 42. В соответствии с этой конфигурацией, загнутый назад участок 50е пояса поясных элементов, соединенный с одним соединителем из поясных соединителей 42, автоматически расположен рядом с другим соединителем из пары поясных соединителей 42, так что устройство может быть легко расположено на теле.
В устройстве 10 электростимуляции мышц, которое соответствует первому варианту осуществления изобретения, основная часть 20 содержит блок 30 управления для подачи напряжения на пару электродов 32. Пара электродов 32 расположена симметрично относительно блока 30 управления. В соответствии с этой конфигурацией, основная часть 20 может быть надета так, что блок 30 управления направлен внутрь тела при тренировке как мышцы на передней части участка, на котором расположено устройство, так и мышцы на задней части этого участка. Благодаря направленному внутрь расположению блока 30 управления на теле, уменьшается вероятность столкновения блока 30 управления, например, с ножкой стола, и его повреждения. Благодаря направленному внутрь расположению блока 30 управления на теле, пользователь может чувствовать, что блок 30 управления все время расположен по направлению к центру тела и ему не нужно заботиться о том, чтобы следить за блоком 30 управления.
Второй вариант осуществления изобретения
Далее со ссылками на фиг. 11-13 опишем устройство 60 электростимуляции мышц, соответствующее второму варианту осуществления изобретения. На чертежах и в описании второго варианта осуществления изобретения структурные элементы и элементы, совпадающие или аналогичные элементам из первого варианта осуществления изобретения, будут обозначены такими же ссылочными позициями. Повторные объяснения надлежащим образом опущены, а признаки, отличные от признаков первого варианта осуществления изобретения, будут подчеркнуты.
Блок 30 управления устройства 10 электростимуляции мышц, которое соответствует первому варианту осуществления изобретения, описан как соединенный с основной частью 20 в качестве единого целого, но изобретение не ограничено этим признаком. Например, основная часть может не содержать блока управления, и блок управления может быть выполнен как отдельное устройство. Блок управления может быть выполнен с возможностью съемной установки с использованием механизма крепления, который предусмотрен на основной части.
На фиг. 11 показан вид спереди основной части 62 устройства 60 электростимуляции мышц, соответствующего второму варианту осуществления изобретения. Устройство 60 электростимуляции мышц меньше по размеру по сравнению с устройством 10 электростимуляции мышц, которое соответствует первому варианту осуществления изобретения, и может быть подходящим образом использовано для мышцы верхней конечности, такой как бицепс руки и трицепс руки, и мышцы нижней конечности худого тела. На фиг. 12 показана структурная схема, иллюстрирующая признаки устройства 60 электростимуляции мышц. На фиг. 13A и 13B показаны виды сбоку, схематично иллюстрирующие пространство, окружающее механизм 64 крепления устройства 60 электростимуляции мышц. На фиг. 13А и 13В показан пример блока 70 управления, который может быть прикреплен к устройству 60 электростимуляции мышц.
Устройство 60 электростимуляции мышц, которое соответствует второму варианту осуществления изобретения, не содержит блока управления на основной части 62, а содержит механизм 64 крепления и выводы 38 приема электроэнергии. Блок 70 управления выполнен как устройство, отдельное от основной части 62, и его прикрепляют к основной части 62 с помощью механизма 64 крепления. Блок 70 управления снабжен выводами 72 подачи электроэнергии. Когда блок 70 управления установлен на основной части 62, выводы 72 подачи электроэнергии контактируют с выводами 38 приема электроэнергии и электрическая энергия подается на выводы 38 приема электроэнергии для осуществления электростимуляции.
Основная часть 62 второго варианта осуществления изобретения соответствует основной части 20 первого варианта осуществления изобретения и снабжена всеми признаками и характеристиками, которые не предусмотрены в блоке 30 управления. Блок 70 управления подает напряжение на пару электродов 32. Блок 70 управления соответствует блоку 30 управления первого варианта осуществления изобретения и снабжен всеми признаками и характеристиками блока 30 управления.
Участок уменьшения силы контакта
Если сустав согнут, когда устройство 60 электростимуляции мышц расположено на верхней конечности или нижней конечности, окружение центра внешнего края основной части в направлении Y может войти в жесткий контакт с суставом, что дает пользователю дискомфортное тактильное ощущение. В частности, с учетом короткого расстояния от внешнего края основной части 62 до локтевого сустава, когда устройство расположено на верхней конечности, внешний край 20d может жестко контактировать с локтевым суставом, когда локтевой сустав согнут. Для решения указанной проблемы, устройство 60 электростимуляции мышц, которое соответствует второму варианту осуществления изобретения, содержит участок 26 уменьшения силы контакта в области внешнего края основной части 62, которая контактирует с суставом рядом с участком, на котором расположено устройство, когда сустав согнут, указанный участок 26 уменьшения силы контакта выполнен для уменьшения силы контакта с суставом.
Например, участок 26 уменьшения силы контакта может содержать, в области внешнего края, направленной к центру сустава, снижающийся участок, который направлен от сустава. В основной части 62 из этого примера, участок 26 уменьшения силы контакта содержит дугообразные снижающиеся участки 26b, 26c, которые выполнены в форме снижающейся дуги. Благодаря наличию дугообразных снижающихся участков 26b, 26c, внешние края 20d, 20f имеют изогнутую форму, показанную на фиг. 11. Дугообразные снижающиеся участки 26b, 26c расположены на соответствующих внешних краях 20d, 20f основной части 62 в направлении Y. Соответственно, может быть уменьшена сила контакта, даже тогда, когда основная часть 62 надета перевернутой.
Механизм крепления
Основная часть 62 снабжена механизмом 64 крепления и выводами 38 приема электроэнергии. Механизм 64 крепления является механизмом для съемного прикрепления блока 70 управления к основной части 62. Механизм 64 крепления может быть выполнен так, что блок 70 управления может быть прикреплен или откреплен с использованием некоторого инструмента. Желательно, чтобы блок 70 управления мог быть прикреплен или откреплен вручную без использования инструмента. Для настройки механизма 64 крепления в основной части 62 может быть применен механизм крепления, основанный на любом из различных принципов, таких как принцип крепежных элементов общего назначения. Одним примером механизма 64 крепления, который может быть использован, является механизм, использующий магнитное притяжение, механизм, содержащий крюк и вырез, сцепляемый с крюком, механизм, содержащий внешнюю резьбу и внутреннюю резьбу, механизм, содержащий липучку, и механизм, содержащий кнопку.
В механизме 64 крепления из этого примера блок 70 управления снабжен магнитом 76, а основная часть 62 снабжена магнитным элементом 68, который магнитным образом притягивает магнитный полюс магнита 76. Магнитное притяжение между магнитным полюсом магнита 76 и магнитным элементом 68 поддерживает блок 70 управления в основной части 62. Когда к блоку 70 управления прикладывают силу, превосходящую притяжение магнита 76, блок 70 управления отделяется от основной части 62. На фиг. 13А показано устройство 60 электростимуляции мышц, к которому не прикреплен блок 70 управления. На фиг. 13В показано устройство 60 электростимуляции мышц, к которому прикреплен блок 70 управления.
Выводы приема электроэнергии
Выводы 38 приема электроэнергии содержат два вывода 38b, 38c, которые расположены с заранее заданным интервалом в основной части 62. Аналогично первому варианту осуществления изобретения, выводы 38b, 38c соединены с первым электродом 32b и вторым электродом 32с из пары электродов 32. Поверхность выводов 38b, 38c может быть обработана с целью предотвращения ржавления поверхности электродов. Например, выводы могут быть покрыты благородным металлом. Выводы 38 приема электроэнергии могут быть выполнены как пружинные элементы, чтобы сделать устойчивым давление контакта с выводами 72 подачи электроэнергии.
Выводы подачи электроэнергии
Выводы 72 подачи электроэнергии содержат выводы 72b, 72c, расположенные в местах, которые выровнены с выводами 38b, 38c из выводов 38 приема электроэнергии. Например, выводы 72b, 72c могут быть выполнены в виде пружинных элементов. Выводы 72b, 72c подают электрическую энергию на выводы 38b, 38c для осуществления электростимуляции.
Как описано в первом варианте осуществления изобретения, основная часть 20 может быть расположена симметрично относительно блока 70 управления. В частности, основная часть 62 может быть выполнена с осевой симметрией относительно прямой линии М1. Пара электродов 32 может быть расположена с осевой симметрией относительно блока 70 управления. В частности, пара электродов 32 может быть выполнена с осевой симметрией относительно прямой линии М1.
Способ хранения
Далее со ссылками на фиг. 14 будет описан пример способа хранения устройства 60 электростимуляции мышц. На фиг. 14 показан вид сзади, иллюстрирующий лист 80 установки, приклеенный к устройству 60 электростимуляции мышц. Устройство 60 электростимуляции мышц может храниться так, что гелевая подушка 82 приклеена к задней стороне после использования. Следовательно, лист 80 установки, обладающий определенной жесткостью, может быть приклеен к задней стороне гелевой подушки 82.
Размер листа 80 установки может превосходить размер основной части 62, и форма листа 80 установки может быть прямоугольной. Желательно, чтобы устройство хранилось с прикрепленными поясными элементами 50. Для удовлетворения этому требованию лист 80 установки снабжен вырезанным участком 80b в областях, где контактируют прямоугольные трубчатые элементы 42k и поясные элементы 50. Благодаря наличию вырезанного участка 80b, лист 80 установки может быть тесно прикреплен к гелевой подушке 82 на некотором расстоянии от прямоугольных трубчатых элементов 42k и поясных элементов 50. Участки листа 80 установки, за исключением вырезанных участков 80b в четырех углах, образуют удлинения 80с, 80d, которые продолжаются в соответствующие стороны в направлении Х. Для гладкости поверхность листа 80 установки может быть снабжена некоторым покрытием.
Устройство 60 электростимуляции мышц может быть приклеено к листу 80 установки и может храниться в сумке для хранения. Сумка для хранения может быть выполнена из ткани или полимерного листа. Таким образом, устройство может храниться с прикрепленной гелевой подушкой 82, и уменьшается вероятность приклеивания к гелевой подушке 82 посторонних материалов или сумки.
Устройство 60 электростимуляции мышц, соответствующее второму варианту осуществления изобретения и выполненное так, как описано выше, в случае, когда прикреплен блок 70 управления, работает аналогично устройству 10 электростимуляции мышц, которое соответствует первому варианту осуществления изобретения.
Устройство 60 электростимуляции мышц, соответствующее второму варианту осуществления изобретения, обеспечивает такие же преимущества, как и устройство 10 электростимуляции мышц, которое соответствует первому варианту осуществления изобретения. Кроме того, устройство 60 электростимуляции мышц, которое соответствует второму варианту осуществления изобретения, обеспечивает следующее преимущество.
В устройстве 60 электростимуляции мышц, которое соответствует второму варианту осуществления изобретения, участок 26 уменьшения силы контакта, выполненный с возможностью уменьшения силы контакта с суставом, расположен в области внешнего края основной части 62, которая контактирует с суставом рядом с участком, на котором расположено устройство, когда сустав согнут. В соответствии с этой конфигурацией, может быть уменьшена сила контакта с согнутым суставом по сравнению с ситуацией, когда не предусмотрен участок уменьшения силы контакта. Этот может уменьшить дискомфортное тактильное ощущение в участке, на котором расположено устройство, вызванное силой контакта.
Основная часть 62 устройства 60 электростимуляции мышц, которое соответствует второму варианту осуществления изобретения, снабжено механизмом 64 крепления, благодаря которому блок 70 управления может быть прикреплен с возможностью разъединения, при этом блок 70 управления подает напряжение на пару электродов 32. В соответствии с этой конфигурацией, один блок управления может быть заменяемым образом использован в основных частях разных типов. Кроме того, если основная часть выйдет из строя, может быть заменена только основная часть. Это более экономно и экономит много ресурсов по сравнению со случаем незаменяемого блока управления.
Выше настоящее изобретение описано на основе вариантов осуществления изобретения. Варианты осуществления изобретения предназначены только для иллюстрации, и специалистам в рассматриваемой области ясно, что в рамках объема настоящего изобретения возможны изменения и модификации и что такие изменения и модификации также будут в рамках объема настоящего изобретения. Следовательно, описание из настоящего документа и чертежи необходимо рассматривать как иллюстрации, и они не должны ограничивать объем настоящего изобретения.
Далее будет приведено описание модификаций. На чертежах и в описании модификаций структурные элементы и элементы, совпадающие или аналогичные элементам из вариантов осуществления изобретения, будут обозначены такими же ссылочными позициями. Повторные объяснения надлежащим образом опущены, а признаки, отличные от признаков вариантов осуществления изобретения, будут подчеркнуты.
Первая модификация
В вариантах осуществления изобретения поясные элементы 50 описаны как используемые для расположения устройства электростимуляции мышц на теле, но варианты осуществления изобретения не ограничены этим признаком. Клейкость гелевой подушки может быть использована для прикрепления устройства электростимуляции мышц к телу.
Вторая модификация
В вариантах осуществления изобретения блок 30 управления описан как расположенный направленным в сторону конца в направлении Х, но варианты осуществления изобретения не ограничены таким расположением. Блок 30 управления может быть расположен в промежуточной области основной части 20 в направлении Х. В частности, центр блока 30 управления может быть расположен в положении, которое делит пополам основную часть 20 в направлении Х.
Третья модификация
В вариантах осуществления изобретения продольные направления пары электродов 32 описаны как расположенные, по существу, параллельно друг другу, но варианты осуществления изобретения не ограничены этим расположением. Пара электродов 32 может быть расположена под углом друг к другу. В качестве примера, расстояние между парой электродов может быть таким, что оно постепенно уменьшается от одного конца в направлении Y по направлению к другому концу. В этой конфигурации легко расположить каждый электрод из пары электродов в соответствии с трехмерной формой мышцы или сустава участка, на котором расположено устройство. Например, пара электродов может быть расположена в форме буквы V с отсутствующим верхним концом, при этом один конец одного электрода из пары электродов приближается к одному концу другого электрода из пары электродов.
В этом случае, если угол, образованный продольными направлениями пары электродов 43, слишком велик, один конец одного электрода из пары электродов 43 слишком сильно приближается к одному концу другого электрода из пары электродов, в результате чего возможно неравномерное распределение электрического тока и узкая область, в которой стимулируют нерв. С учетом сказанного, угол, образованный продольными направлениями пары электродов, может быть выполнен равным 90° и меньше. Подтверждается, что в этом диапазоне получается практическое применение.
Четвертая модификация
В вариантах осуществления изобретения описан пример, в котором поясные элементы 50, соответственно, предусмотрены для двух элементов 20b, 20с в форме полос, и два элемента 20b, 20с в форме полос независимо обернуты вокруг участка, на котором расположено устройство, но варианты осуществления изобретения не ограничены этим признаком. В качестве альтернативы, для двух элементов 20b, 20с в форме полос может быть предусмотрен один поясной элемент. На фиг. 15A и 15B схематично показан поясной элемент 150, соответствующий четвертой модификации. На фиг. 15А схематично показан вид спереди, а на фиг. 15В схематично показан вид сзади. Как показано на фиг. 15A и 15B, поясной элемент 150, соответствующий четвертой модификации, содержит разделенные Y-образные участки. Y-образные участки поясного элемента 150, соответственно, соединяют с элементами 20b, 20с в форме полос, и один поясной элемент 150 прикрепляет два элемента 20b, 20с в форме полос к участку, на котором расположено устройство. Благодаря такому использованию поясного элемента 150 с Y-образными участками, может быть надета основная часть, обладающая разветвляющейся структурой, которая может быть легко приспособлена к форме тела.
Пятая модификация
В вариантах осуществления изобретения дистанционный контроллер 12 описан как содержащий сенсорную панель, приспособленную для ввода операций касания и отображения, но варианты осуществления изобретения не ограничены этим признаком. Ввод управления со стороны пользователя может быть осуществлен с помощью дистанционного контроллера 12 с использованием устройства управления со стороны пользователя, которое отлично от сенсорной панели, на основе изображения, показываемого на устройстве отображения, которое отлично от сенсорной панели. Примером устройства отображения является жидкокристаллическое устройство, а примером устройства управления со стороны пользователя является кнопочный переключатель, такой клавиатура.
Описанные выше модификации обладают такими же достоинствами, что и варианты осуществления изобретения.
В качестве вариантов осуществления изобретения также могут быть использованы произвольные комбинации вариантов осуществления изобретения и комбинации некоторого варианта осуществления настоящего изобретения и некоторой модификации. Новый вариант осуществления изобретения, созданный благодаря некоторой комбинации, будет обладать объединенными достоинствами упомянутого варианта осуществления изобретения и упомянутой модификации.
Реферат
Изобретение относится к технике для тренировки мышц. Устройство электростимуляции мышц содержит основную часть с поверхностью контакта, которая расположена вокруг участка нижней или верхней конечности, на котором расположено устройство. Поверхность контакта продолжается в направлении Х, окружая участок, на котором расположено устройство, и в направлении Y, которое перпендикулярно направлению Х. Основная часть снабжена парой электродов, которые расположены на расстоянии друг от друга в направлении Y. Каждый электрод из пары электродов выполнен в форме полосы, протяженность которой в направлении Х больше протяженности в направлении Y. Электроды порождают течение электрического тока в участке вдоль направления протяженности мышечного волокна в участке, на котором расположено устройство. Основная часть содержит два элемента в форме полос, которые разделены промежутком. Пара электродов предусмотрена в соответствующих областях, которые отделены промежутком основной части. Обеспечивается независимый охват окружности участка конечности, так что вряд ли будут образовываться складки, и контакт с телом может быть стабилизирован. Разветвляющаяся форма позволяет независимо изгибаться элементам в форме полос и уменьшает складки при наличии изменения толщины участка конечности. 5 з.п. ф-лы, 15 ил.
Комментарии