Способ адаптивного воздействия на живой организм (варианты) - RU2645923C2
Код документа: RU2645923C2
Чертежи



Описание
Изобретение относится к физиотерапии, в частности к способам электроимпульсного воздействия на живой организм (далее - электровоздействие), а конкретно к СКЭНАР-терапии или другим способам электровоздействия, в которых для генерации стимулов применяют индуктивный накопитель энергии, и может быть использовано для лечебных, реабилитационных, профилактических целей, а также при выполнении исследований, связанных с изучением влияния на живой организм воздействия электростимуляции.
Имеется достаточно большое количество патентов, в которых изложены способы и технические средства для осуществления СКЭНАР-терапии (см., например, патенты RU 2325929, 2325930, 2155614, 2161904, 2211712, 2113249 и др.), а также способы лечения различных заболеваний с использованием СКЭНАР-терапии (см., например, патенты RU 2405595, 2377032, 2344852, 2380124, 2294216, 2250785, 2175564, 2296551, 2285550, 2212907).
Известен способ электровоздействия на ткани биологического объекта стимулами, подаваемыми через электроды, выявление реакции тканей на стимулы и управление шириной и амплитудой стимулов в зависимости от выявленной реакции тканей биологического объекта (см. международную заявку на изобретение WO 0209809A1, A61N 1/36, опубл. 07.02.2002).
В данном способе электроимпульсного воздействия применяют одиночные стимулы, в зависимости от реакции тканей управляют шириной (длительностью) и амплитудой стимулов. Формирование стимулов без использования индуктивного накопителя энергии исключает возможность параметрического управления их формой, а управление лишь двумя параметрами стимулов сужает возможности оптимизации воздействия в зависимости от реакции тканей и функциональные возможности электровоздействия, вследствие чего снижается его эффективность. К снижению эффективности приводит также и практически неизменная и наперед заданная форма стимулов, вызывающая эффект «привыкания».
Известен способ электростимуляции, включающий воздействие на ткани биологического объекта стимулами, подаваемыми через электроды, и управление длительностью стимулов в соответствии с оценкой электрофизиологических параметров состояния межэлектродных тканей, производимой одновременно с электростимуляцией биологического объекта (см. международную заявку на изобретение WO 1990010472 A1, A61N 1/36, опубл. 20.09.1990).
Известен также способ СКЭНАР-терапии, включающий воздействие на ткани биологического объекта стимулами, формируемыми с использованием индуктивного накопителя энергии и подаваемыми на указанные ткани через электроды, возбуждение за счет упомянутого воздействия электрических колебаний в тканях биологического объекта между электродами и адаптивное управление длительностью стимулов в соответствии с реакцией организма на электровоздействие с исключением появления у пациента болевых ощущений при проведении СКЭНАР-терапии (см. патент RU 2355443, A61N 1/36, опубл. 20.05.2009).
В данных способах СКЭНАР-терапии на ткани биологического объекта воздействуют одиночными стимулами и управляют длительностью (или частотой и длительностью) стимулов. Адаптация, заявленная в описании последнего изобретения, сводится к обеспечению комфортности воздействия путем подстройки длительности стимулов (фактически - энергии воздействия) согласно некой базе данных в зависимости от частоты свободных колебаний. Использование индуктивного накопителя энергии, образующего совместно с тканями биологического объекта контур ударного возбуждения, обеспечивает параметрическое управление формой стимулов, что снижает известный эффект «привыкания» и повышает эффективность воздействия. Однако использование единичных стимулов не позволяет интенсифицировать воздействие при сохранении его комфортности, а также исключает управление параметрами пачек стимулов, что не позволяет оптимизировать воздействие с учетом реакции организма и снижает функциональные возможности электровоздействия.
Наиболее близким к заявляемому является принятый за прототип известный способ электровоздействия, включающий воздействие на ткани биологического объекта стимулами, формируемыми с использованием индуктивного накопителя энергии и подаваемыми на указанные ткани через электроды, возбуждение за счет упомянутого воздействия электрических колебаний в колебательном контуре, образованном индуктивностью указанного накопителя и импедансом межэлектродных тканей, и управление длительностью электровоздействия и/или изменением формы стимулов в соответствии с протеканием электрохимических процессов в тканях биологического объекта под воздействием стимулов (см. патент RU 2325929, МПК A61N 1/08 A61N 1/36, опубл. 10.06.2008 г.).
В описании прототипа указано, что управление формой стимулов производят на трех уровнях:
- параметрическое управление контуром ударного возбуждения,
- управление путем подключения к индуктивному накопителю демпфирующих RC-цепей и
- изменение параметров пачек стимулов (числа стимулов в пачке, расстояния между стимулами и частоты следования пачек).
Такой спектр возможностей управления стимулами и использование пачек вместо единичного стимула, позволяют повысить эффективность электровоздействия по отношению к предыдущим способам. Тем не менее, недостатком прототипа является невозможность управления стимулами в соответствии с текущими значениями параметров электрических колебаний, например отсутствие синхронизации очередного стимула пачки с фазой свободных колебаний предыдущего стимула. В результате снижается степень адаптации стимулирующего воздействия электрических стимулов к состоянию стимулируемых тканей и функциональные возможности электровоздействия, вследствие чего снижается эффективность электроимпульсной терапии. При этом возможно появление у пациента дискомфортных и даже болевых ощущений, что снижает уровень комфортности терапии.
Задачей группы изобретений является создание способа электровоздействия, обеспечивающего адаптивное управление стимулами в соответствии с текущими значениями параметров колебаний (в том числе синхронизацию очередного стимула пачки с фазой свободных колебаний предыдущего стимула и/или изменение формы и/или амплитуды каждого из стимулов пачки) за счет оптимизации момента измерения с учетом характера изменений межэлектродного импеданса, повышения тем самым степени адаптации электровоздействия к состоянию стимулируемых тканей и комфортности воздействия, а также расширение функциональных возможностей электровоздействия.
Решение поставленной задачи достигается тем, что в способе электровоздействия, включающем установку электродов на ткани биологического объекта и пропускание через них пачек электрических стимулов, формируемых при помощи индуктивного накопителя в виде, например, катушки индуктивности, или трансформатора, или автотрансформатора, измеряют параметры свободных колебаний, возникающих в колебательном контуре, образованном индуктивностью указанного накопителя и импедансом межэлектродных тканей, во время воздействия текущей пачки стимулов и в соответствии с результатами измерений управляют длительностью воздействия, и/или параметрами стимулов в этой же пачке и/или в любых последующих пачках стимулов, в том числе управляют моментом начала очередного стимула в пачке в зависимости от фазы свободных колебаний предыдущего стимула.
Возможен также вариант выполнения заявляемого способа электровоздействия, при котором измеряют параметры свободных колебаний последнего стимула пачки и в соответствии с результатами этих измерений управляют длительностью воздействия параметрами стимулов в следующей пачке и/или в любых последующих пачках стимулов, в том числе управляют моментом начала очередного стимула в пачке в зависимости от фазы свободных колебаний предыдущего стимула.
Наконец, возможен вариант выполнения заявляемого способа электровоздействия, в соответствии с которым по окончании пачки и до начала следующей формируют зондирующий стимул, измеряют параметры его свободных колебаний и в соответствии с результатами этих измерений управляют длительностью воздействия, параметрами стимулов в следующей пачке и/или в любых последующих пачках стимулов, в том числе управляют моментом начала очередного стимула в пачке в зависимости от фазы свободных колебаний предыдущего стимула.
В любом из указанных выше вариантов выполнения заявляемого способа электровоздействия в качестве управляемых параметров стимулов принимают количество стимулов в пачке, и/или временной интервал между смежными стимулами пачки, и/или форму и/или амплитуду каждого из стимулов пачки, и/или частоту следования последующих пачек стимулов.
Техническим результатом, получаемым при использовании изобретения, является повышение эффективности и комфортности электровоздействия.
Благодаря адаптивному управлению стимулами расширяются функциональные возможности электровоздействия, появляется возможность осуществлять выбор оптимальной для терапии структуры воздействующего сигнала, повышается степень адаптации электровоздействия к реакции тканей биологического объекта. Как следствие, повышается терапевтический эффект от электровоздействия и снижается возможность появления у пациента болевых ощущений, что, в конечном итоге, обеспечивает повышение эффективности и комфортности электровоздействия.
Сущность изобретения поясняется чертежами, на которых изображены:
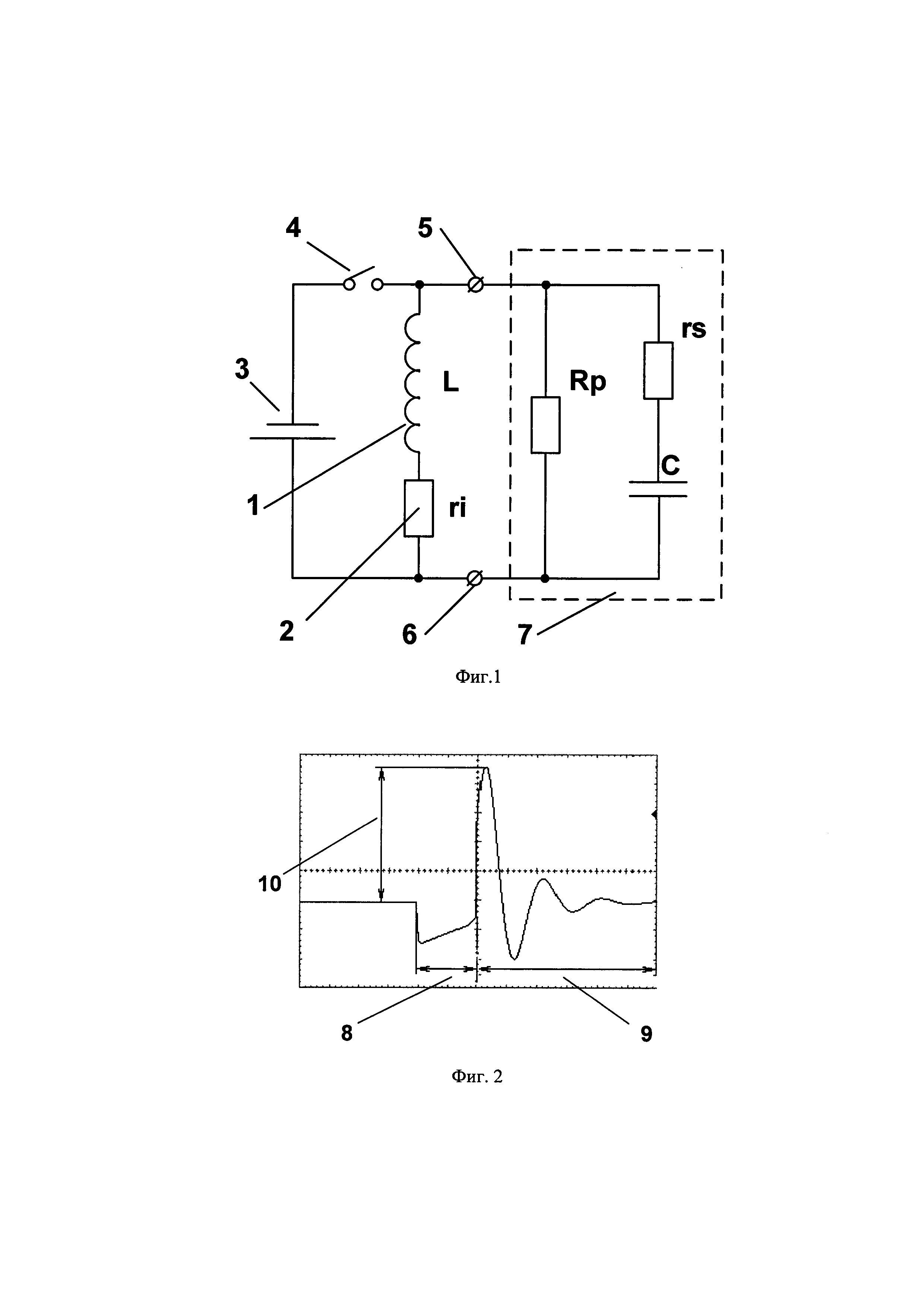
на фиг. 1 - функциональная схема выходного каскада аппарата СКЭНАР и электрического эквивалента межэлектродных тканей биологического объекта;
на фиг. 2 - пример стимула;
на фиг. 3 - форма стимулов до установки электродов на биологический объект;
на фиг. 4 - форма стимулов сразу после установки электродов на биологический объект;
на фиг. 5 - форма стимулов через 5 с после установки электродов на биологический объект;
на фиг. 6 - форма стимулов через 30 с после установки электродов на биологический объект;
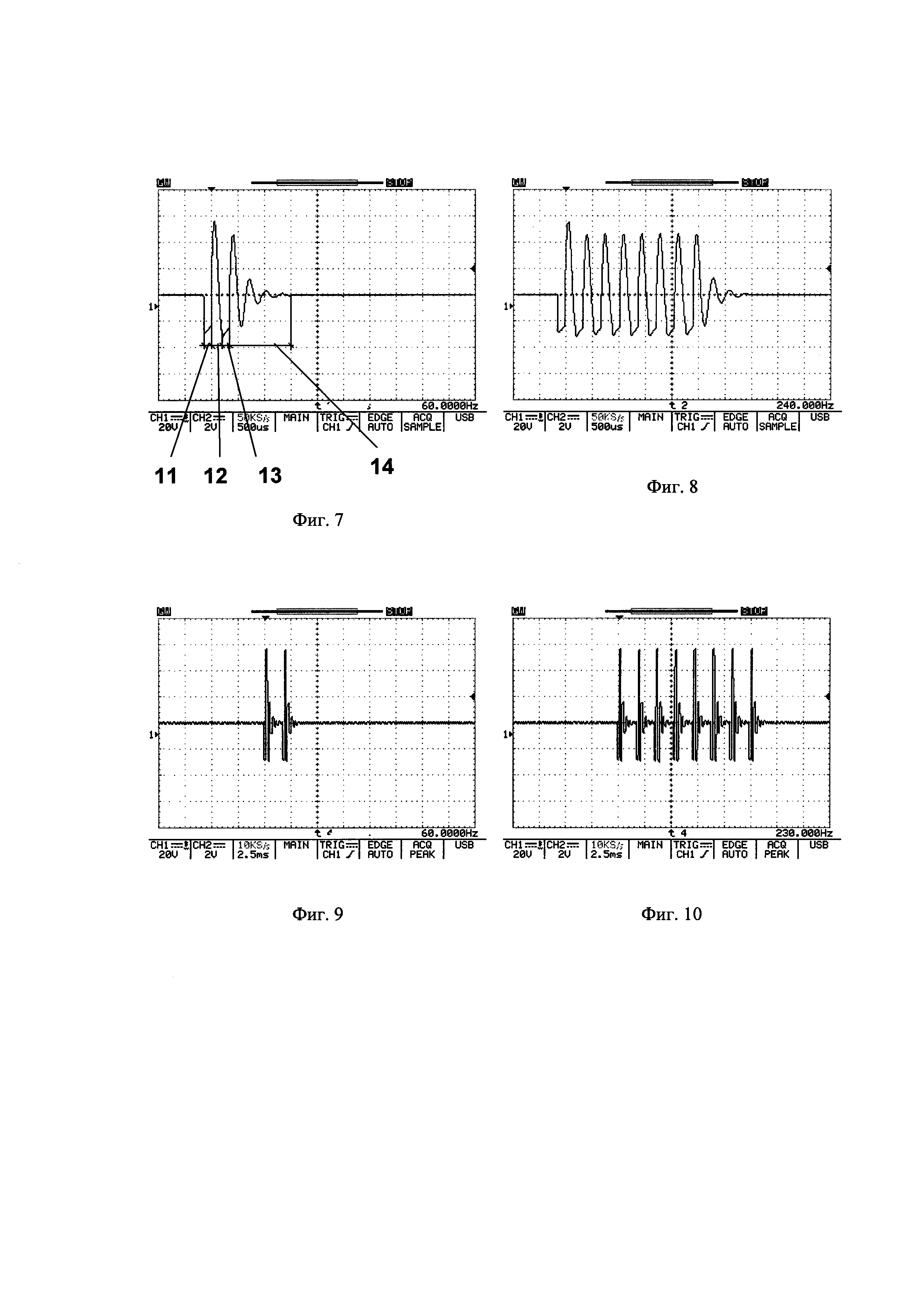
на фиг. 7 - форма пачки стимулов с числом стимулов I=2 и зазором G=200 мкс;
на фиг. 8 - форма пачки стимулов с числом стимулов I=8 и зазором G=200 мкс;
на фиг. 9 - форма пачки стимулов с числом стимулов I=2 и зазором G=1600 мкс;
на фиг. 10 - форма пачки стимулов с числом стимулов I=8 и зазором G=1600 мкс;
на фиг. 11 - форма пачки стимулов с числом стимулов I=2 с запуском накачки второго стимула по завершении колебаний первого стимула;
на фиг. 12 - форма пачки стимулов с числом стимулов I=2 при запуске накачки второго стимула в момент минимума третьего колебания первого стимула;
на фиг. 13 - форма пачки стимулов с числом стимулов I=2 при запуске накачки второго стимула в момент максимума третьего колебания первого стимула;
на фиг. 14 - форма пачки стимулов с числом стимулов I=2 при запуске накачки второго стимула при переходе через нуль между вторым и третьим колебанием первого стимула;
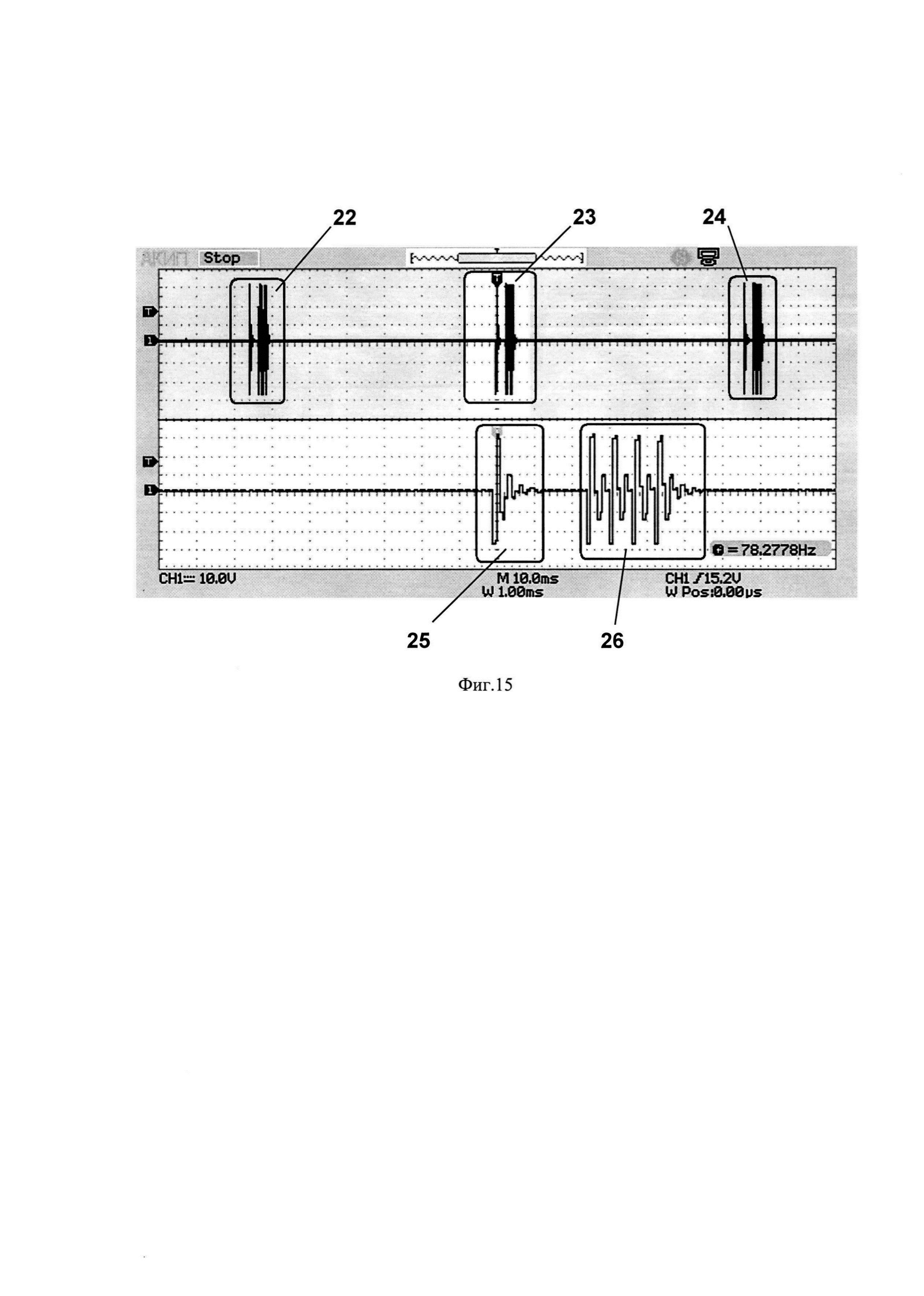
на фиг. 15 - форма пачек стимулов с зондирующим стимулом между пачками;
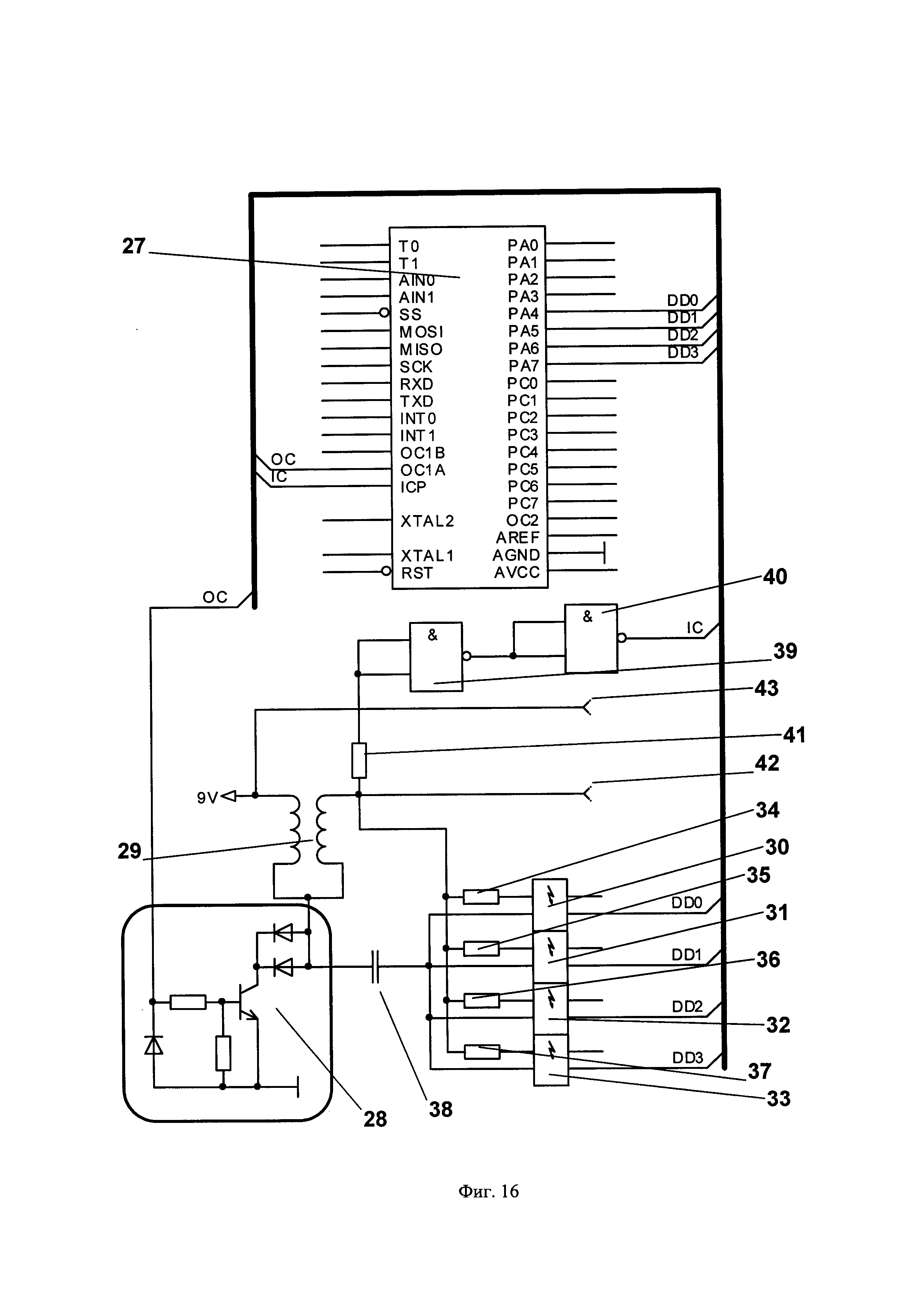
на фиг. 16 - фрагмент схемы электростимулятора нейроадаптивного «СКЭНАР-1-НТ»;
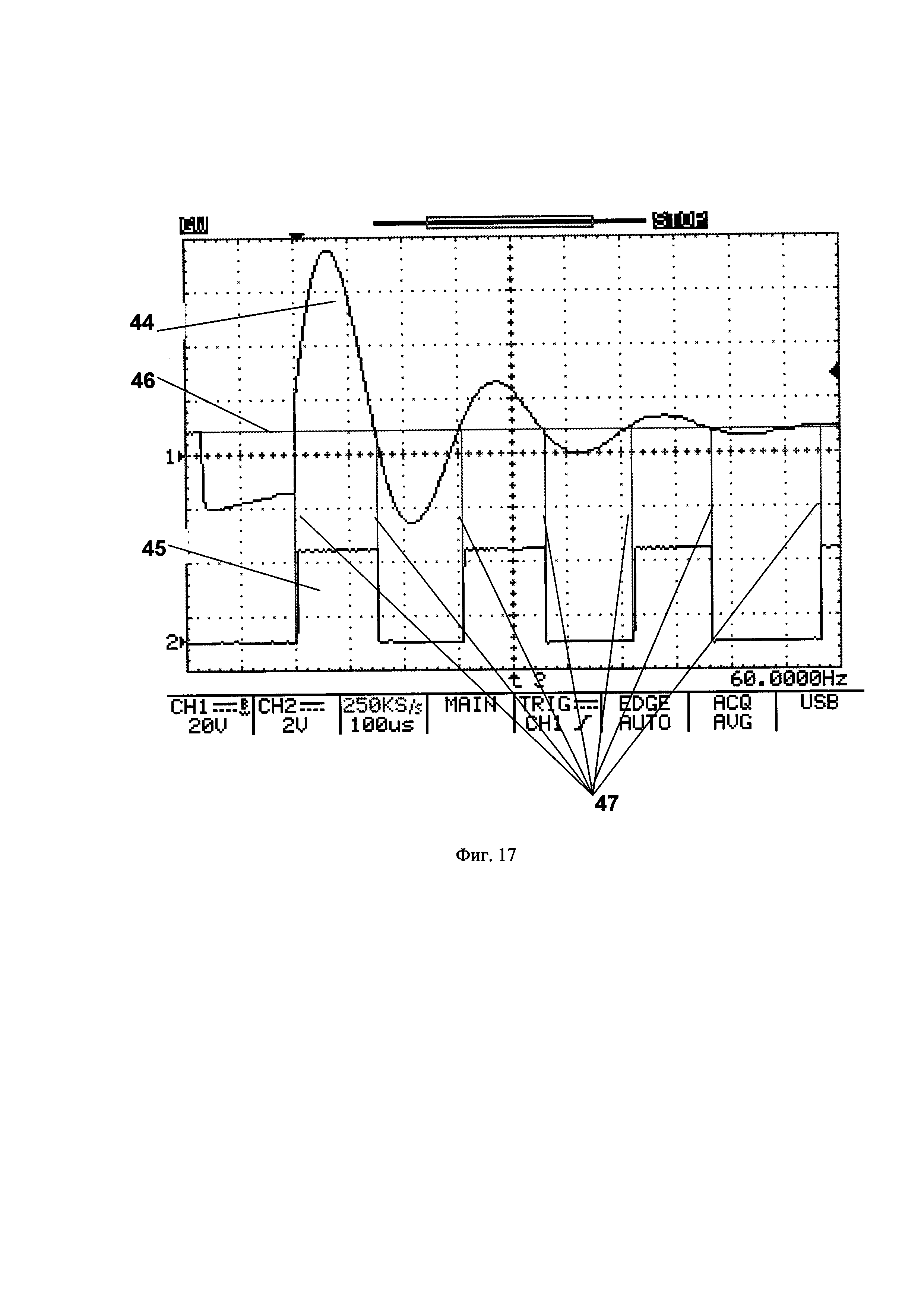
на фиг. 17 - осциллограмма стимулов и выхода компаратора в электростимуляторе нейро-адаптивном «СКЭНАР-1-НТ»;
на фиг. 18 - пример определения моментов минимума и максимума колебаний по времени соседних переходов через нуль.
Предлагаемый способ электровоздействия может быть реализован, например, с помощью электростимулятора нейроадаптивного СКЭНАР-1-НТ (далее - аппарата СКЭНАР). Функциональная схема выходного каскада аппарата СКЭНАР включает индуктивный накопитель энергии 1 (фиг. 1) с внутренним активным сопротивлением 2, подключенный к источнику питания 3 через ключ 4 и к электродам 5 и 6, которые накладываются на ткани биологического объекта, электрический эквивалент которых представлен RC-цепочкой 7 (см. книгу "Методы клинической нейрофизиологии" / Под ред. В.Б. Гречина. Л.: Наука. 1977, с. 7-8) и включает сопротивление Rp и емкость С двойного слоя, а также сопротивление rs межэлектродных тканей.
На фиг. 2 показан пример формы стимула: 8 - первая стадия стимула (накачка), 9 - вторая стадия стимула (свободные колебания), 10 - амплитуда первого импульса второй стадии стимула (далее по тексту - амплитуда стимула).
Аппарат СКЭНАР работает следующим образом.
В исходном положении ключ 4 разомкнут. При замыкании ключа 4 начинается первая стадия 8 формирования стимула, в процессе которой на индуктивный накопитель 1 подается напряжение от источника питания 3, которое вызывает протекание через нее линейно увеличивающегося тока и тем самым накопление индуктивным накопителем 1 электромагнитной энергии. Т.е. в этот момент происходит "накачивание" энергии в индуктивный накопитель 1, отсюда другое название первой стадии стимула - "накачка".
На этой стадии параллельно межэлектродным тканям 7 подключены индуктивный накопитель 1 с активным сопротивлением 2, а также источник питания 3, последовательно соединенный с ключом 4. Поскольку внутреннее сопротивление источника питания 3 и ключа 4 (единицы Ом, эти сопротивления на схеме не показаны из-за малых величин) существенно меньше импеданса межэлектродных тканей 7, форма стимула в течение первой стадии практически не зависит от импеданса межэлектродных тканей 7.
После достижения заданной величины накопленной энергии индуктивный накопитель 1 отключают от источника питания 3, размыкая ключ 4. При этом начинается вторая стадия 9 формирования стимула, в процессе которой энергия, накопленная в предыдущей стадии индуктивным накопителем 1, через электроды 5 и 6 передается на ткани биологического объекта 7 и возбуждает свободные электрические колебания в колебательном контуре, образованном индуктивностью накопителя 1 и импедансом межэлектродных тканей 7. Теперь небольшое внутреннее сопротивление 2 индуктивного накопителя 1 включено последовательно с импедансом межэлектродных тканей 7, поэтому форма колебаний полностью определяется импедансом межэлектродных тканей 7 и индуктивностью накопителя 1.
Другое название второй стадии - «свободные колебания». Такой способ возбуждения колебаний известен под названием «ударное возбуждение», а указанный контур под названием «контур ударного возбуждения». При этом не имеет значения конкретное исполнение индуктивного накопителя - в виде катушки индуктивности, трансформатора или автотрансформатора. Важна лишь способность элемента, подключенного к электродам, накапливать электромагнитную энергию.
Амплитуда стимула 10 зависит как от энергии, накопленной во время первой стадии (длительности первой стадии 8), так и от параметров импеданса межэлектродных тканей 7.
Описанные стадии следуют друг за другом в течение всей процедуры СКЭНАР-терапии.
Предлагаемый способ электровоздействия осуществляется следующим образом.
Электроды 5 и 6 аппарата СКЭНАР устанавливают на ткани биологического объекта и с помощью аппарата СКЭНАР в описанном выше порядке формируют двухстадийные стимулы на электродах 5 и 6.
Поскольку ткани биологического объекта содержат сложный комплекс водных растворов, при их контакте с электродами 5 и 6 на границе металлических электродов 5, 6 и упомянутых тканей формируется разность потенциалов (двойной электрический слой), называемая электродным потенциалом (см. книгу: Методы клинической нейрофизиологии. Под ред. В.Б. Гречина. Л.: Наука, 1977, с. 7-8).
В результате формирования двойного электрического слоя, а также под воздействием стимулов, передаваемых через электроды 5 и 6 на ткани биологического объекта, их импеданс изменяется во времени. Это, в свою очередь, приводит к изменению во времени параметров электрических колебаний в упомянутом колебательном контуре.
Из представленных в качестве примера на фиг. 3-6 осциллограмм реальной формы стимулов на коже пациента (рамкой в правом верхнем углу выделены результаты автоматического измерения амплитуды стимула) при постоянной энергии стимулов следует, что максимальная амплитуда стимулов, на холостом ходу достигавшая 300 В (фиг. 3, до установки), сразу после установки электродов на ткани снижается до 228 В (фиг. 4), затем в течение 5 с падает до 90 В (фиг. 5), а еще через 25 с снижается до 42-46 В (фиг. 6).
Практика СКЭНАР-терапии показывает, что такое существенное (более чем в пять раз) изменение максимальной амплитуды стимулов не отражается на субъективных ощущениях пациентов, возникающих в процессе электровоздействия. Ощущения пациентов зависят от энергии стимулов, которая определяется длительностью накачки.
Терапевтический эффект электровоздействия также зависит от энергии стимулов, однако увеличение энергии единичного стимула не всегда допустимо, поскольку может вызвать у пациентов нежелательные дискомфортные и даже болевые ощущения. Добиваться же усиления терапевтического эффекта путем увеличения частоты стимулов при их неизменной энергии не всегда возможно, поскольку известный «эффект привыкания» усиливается при увеличении частоты стимулов, снижая эффективность электровоздействия (некоторые способы борьбы с «эффектом привыкания» при традиционной электротерапии описаны, например, в патентах RU 2017508, A61N 1/36, опубликованном 15.08.1994, и RU 2054954, A61N 1/36, дата публикации 27.02.1996).
Поэтому рациональным средством повышения интенсивности электроимпульсного воздействия и оказываемого им терапевтического эффекта при постоянных значениях энергии и частоты стимулов является формирование вместо единичных стимулов пачек стимулов, в каждой из которых стимулы следуют друг за другом с гораздо большей частотой, чем частота следования пачек. При этом суммарная энергия пачки возрастает пропорционально количеству I входящих в нее стимулов (устоявшийся термин - «интенсивность»), что повышает эффективность электровоздействия, а «эффекта привыкания» пациента к росту числа импульсов в единицу времени (эквивалентной частоты) не отмечается, что обусловлено невысокой частотой следования пачек.
С ростом числа стимулов в пачках субъективное ощущение от электровоздействия усиливается значительно медленнее, чем растет количество стимулов, что предоставляет большие возможности индивидуального подбора для каждого пациента параметров стимулов при проведении СКЭНАР-терапии.
На фиг. 7-10 представлены осциллограммы СКЭНАР-стимулов на константной нагрузке в виде RC-цепи для пачек с числом стимулов I=2 и I=8 при минимальном и максимальном для аппаратов СКЭНАР-НТ зазорах (интервалах времени между стимулами в пачках, принятое обозначение - Gap) Gapmin=200 мкс, Gapmax - 1600 мкс. На фиг. 7 обозначены: 11 - накачка первого стимула, 12 - незавершенные свободные колебания (при зазоре 200 мкс), 13 - накачка второго стимула, 14 - полностью затухающие свободные колебания. Для данной нагрузки при малых значениях зазора свободные колебания 12, начавшиеся сразу после окончания накачки первого стимула 11, не успевают затухнуть полностью, их прерывает накачка 13 следующего стимула. При этом низкий импеданс цепи накачки (см. выше описание принципа работы аппаратов СКЭНАР) шунтирует (демпфирует) колебательный контур и электрические колебания в последнем почти мгновенно прекращаются, вследствие чего часть энергии предыдущего стимула расходуется вхолостую. Этот эффект хорошо виден при попарном сравнении фиг. 7 и 9 и фиг. 8 и 10 соответственно: при малом зазоре амплитуда второго и последующих стимулов заметно меньше таковой у первого стимула, а при большом зазоре, когда свободные колебания полностью затухают до начала очередной накачки, амплитуды всех стимулов в пачке одинаковы. Свободные колебания 14 последнего стимула в пачке всегда успевают затухнуть до начала следующей пачки стимулов.
В результате наложения стимулов может снизиться эффективность электровоздействия и, соответственно, терапевтический эффект от СКЭНАР-терапии.
Указанное наложение смежных стимулов в пачках можно исключить путем синхронизации (согласования) начала запуска каждой новой накачки с текущей фазой свободных колебаний.
На фиг. 11 показана пачка из двух стимулов, где обозначены:
- накачка первого стимула 15,
- первое, второе и третье колебания второй стадии первого стимула 16, 17 и 18 соответственно,
- момент окончания колебаний второй стадии первого стимула 19,
- накачка второго стимула 20,
- уровень «ноля» 21.
В пачке, показанной на фиг. 11, накачка второго стимула начинается по завершении свободных колебаний первого стимула (вариант 1 синхронизации).
В качестве примеров синхронизации начала очередной накачки накопителя 1 с текущей фазой свободных колебаний на фиг. 12-14 показан вид пачек с тем же числом стимулов I=2 для трех других вариантов момента запуска накачки очередного (второго в пачке) стимула:
- в момент минимума третьего колебания 18 (фиг. 12) (вариант 2);
- в момент максимума третьего колебания 18 (фиг. 13) (вариант 3);
- при переходе через нуль между вторым 17 и третьим 18 колебаниями (фиг. 14) (вариант 4).
Для наглядности на фиг. 12-14 серым цветом показана форма свободных колебаний в случае, если бы не была начата очередная фаза зарядки индуктивного накопителя 1.
При СКЭНАР-терапии с использованием синхронизации момента начала каждой новой накачки с текущей фазой свободных колебаний было установлено, что несмотря на внешне незначительное различие форм стимулов разница в субъективном восприятии электровоздействия отмечается всеми пациентами. При этом большинство из них описывает свои ощущения как «более колючие» для вариантов 3 и 4 (фиг. 13 и фиг. 14) и «менее колючие» для вариантов 1 и 2 (фиг. 11 и фиг. 12), а остальные как «более сильные» для вариантов 3 и 4 и «более слабые» для вариантов 1 и 2. В связи с этим исходя из ощущений пациентов можно заключить, что варианты 1 и 2 более предпочтительны, поскольку обеспечивают более комфортное СКЭНАР-воздействие при одной и той же воздействующей энергии.
С другой стороны, «более колючие» (фиг. 13 и фиг. 14) стимулы также могут использоваться для расширения функциональных возможностей электровоздействия, когда, например, нужно добиться более сильной или более выраженной реакции на воздействие, не увеличивая его суммарную энергию.
Таким образом, за счет управления моментом начала накачки очередного стимула в пачке (синхронизацией) с текущей фазой свободных колебаний, а также за счет выбора рационального значения числа стимулов в пачке (например, как указано в описании прототипа) можно при почти неизменных ощущениях пациентов заметно увеличить общую энергию электровоздействия, ускорить ответные реакции организма на него и в целом повысить терапевтический эффект от СКЭНАР-терапии при комфортных для пациентов ощущениях от воздействия.
Для обеспечения адаптивного управления стимулами в соответствии с изменениями импеданса тканей биологического объекта в предлагаемом способе при проведении СКЭНАР-терапии контролируют параметры электрических колебаний (длительности фаз и количество колебаний, длительность и степень затухания колебаний и т.д.), возбуждаемых в колебательном контуре, а адаптацию (подстройку) стимулов в соответствии с текущими значениями параметров колебаний осуществляют путем управления параметрами стимулов в пачках, такими как синхронизация очередного стимула пачки с фазой свободных колебаний предыдущего стимула, форма и/или амплитуда каждого из стимулов пачки, частота следования пачек.
Представленные на фиг. 11-14 осциллограммы сняты на неизменной нагрузке, имитирующей межэлектродный импеданс. В реальности в силу указанных выше причин межэлектродный импеданс непрерывно меняется. Для сохранения рационального момента запуска накачки по отношению к свободным электрическим колебаниям необходимо непрерывно контролировать параметры указанных колебаний. В противном случае эффективность электровоздействия может снижаться, либо у пациента могут возникнуть дискомфортные ощущения. Одновременно с управлением моментом запуска накачки можно управлять также другими параметрами стимулов в пачках (количеством I и/или формой стимулов, например, как указано в описании прототипа) и/или частотой следования пачек стимулов, поскольку от этого также в большой степени зависит эффективность электровоздействия.
Кроме того, можно управлять также формой и/или амплитудой каждого из стимулов пачки индивидуально. Например, при числе стимулов в пачке более 1 можно увеличивать амплитуду второго и следующих стимулов от минимума или, например, от половины установленного по ощущениям уровня до этого уровня, что даст более «мягкие» ощущения, чем пачка стимулов равной амплитуды, и позволит регулировать амплитуду в больших пределах. Поскольку форма стимулов зависит от подэлектродного импеданса, управлять ею можно, например, подключая параллельно электродам демпфирующие RC-цепочки с теми или иными параметрами. Это позволяет управлять индивидуально и формой каждого стимула в пачке, изменяя «остроту» ощущений еще и за счет изменения уровня демпфирования.
Возможно также управление вышеперечисленными параметрами стимулов как в текущей пачке, так и в следующей, и/или в любой из последующих пачек стимулов, или в нескольких последующих пачках стимулов подряд. То же касается и частоты следования пачек стимулов, которой можно управлять в зависимости от параметров свободных колебаний - для следующей пачки стимулов или для нескольких последующих пачек.
В соответствии с предлагаемым способом СКЭНАР-терапии контроль параметров свободных колебаний и адаптивное управление стимулами могут осуществляться по следующим трем вариантам.
Первый вариант предусматривает прямой контроль текущего колебательного процесса, при котором параметры свободных колебаний измеряют непосредственно во время воздействия каждого стимула текущей пачки. По результатам этих измерений устанавливают рациональные значения параметров текущей пачки стимулов (момент начала очередного стимула в пачке относительно текущей фазы колебаний и/или количество I и/или форму стимулов), и/или частоту следования последующих пачек стимулов, и/или параметры последующих пачек стимулов. При этом используют одинаковые установки параметров для всех стимулов пачки либо управляют параметрами каждого стимула в пачке раздельно.
Данный вариант обеспечивает наибольшую точность контроля параметров свободных колебаний, поскольку позволяет измерять их в реальном времени и, таким образом, учитывать все изменения межэлектродного импеданса на текущий момент.
Для выполнения указанных измерений в реальном времени необходим быстродействующий аналого-цифровой преобразователь (АЦП), а для своевременного формирования очередного стимула пачки (например, в момент пересечения нуля, как это сделано в варианте синхронизации 4) требуется достаточно высокопроизводительный микроконтроллер.
Кроме того, поскольку форма колебаний меняется непрерывно (в том числе и в течение каждого колебания), для подстройки момента запуска очередной накачки необходимо прогнозировать изменения формы. Это дополнительно повышает требования к производительности микроконтроллера и программному обеспечению.
Поэтому предусмотрен второй вариант контроля параметров свободных колебаний и адаптивного управления стимулами, в соответствии с которым указанные параметры измеряют во время воздействия на ткани биологического объекта последнего стимула пачки. Во время паузы между предыдущей и последующей пачками определяют и устанавливают рациональные значения параметров последующей пачки стимулов (момент начала очередного стимула в пачке относительно фазы колебаний (синхронизацию) и/или количество I и/или форму стимулов), и/или частоту следования последующих пачек стимулов, и/или параметры последующих пачек стимулов.
Положительная особенность данного варианта состоит в том, что колебательный процесс последнего стимула пачки всегда завершается без каких-либо помех, поскольку на него не может наложиться первый стимул очередной пачки. При этом обеспечивается точное определение параметров указанных колебаний после их завершения, благодаря чему исключается необходимость прогнозирования указанных параметров. За счет этого в сравнении с предыдущим вариантом существенно снижаются требования к производительности микроконтроллера и упрощается программное обеспечение. При этом вместо быстродействующего АЦП можно использовать более простой узел - компаратор, который обеспечивает прямое измерение числа колебаний и моментов перехода указанных колебаний через нуль.
При понижении частоты следования пачек стимулов до 20-30 Гц (при увеличении паузы между пачками свыше 30 мс) за время паузы происходят достаточно заметные изменения межэлектродного импеданса, способные снизить точность согласования момента начала очередного стимула в пачке с текущей фазой колебаний и/или корректировки частоты следования последующих пачек стимулов и/или параметров стимулов в последующих пачках, вследствие чего может понизиться эффективность электровоздействия и/или степень комфортности процедуры СКЭНАР-терапии.
В связи с этим предлагается третий вариант контроля параметров колебаний и адаптивного управления, в соответствии с которым по окончании последнего стимула пачки, но до начала формирования следующей пачки (т.е. в паузе между двумя смежными пачками) формируют единичный зондирующий стимул.
На фиг. 15 приведен пример таких стимулов. На верхней осциллограмме имеются три пачки стимулов 22, 23 и 24, на ней светлым фоном выделен участок с пачкой стимулов 23, который в увеличенном (растянутом) виде приведен на нижней осциллограмме. Здесь хорошо виден зондирующий стимул 25, колебательный процесс которого успевает полностью завершиться до начала основной пачки импульсов 26.
При этом измеряют параметры колебаний указанного зондирующего стимула и по результатам этих измерений устанавливают момент начала очередного стимула в пачке относительно фазы колебаний (синхронизацию), и/или параметры стимулов в последующих пачках, и/или частоту следования последующих пачек стимулов, и/или параметров стимулов в любых последующих пачках.
Зондирующий стимул должен располагаться как можно ближе к следующей пачке стимулов, но при этом на расстоянии, гарантирующем завершение его колебаний до начала первого стимула следующей пачки.
Данный вариант обеспечивает высокую точность определения момента начала накачки при формировании стимулов в следующей пачке даже при низких частотах следования пачек стимулов.
Анализ представленных вариантов контроля параметров колебаний и адаптивного управления стимулами показывает, что каждый из них имеет свою оптимальную область применения.
Первый вариант является наиболее универсальным и обеспечивает высокую точность управления, но при этом предъявляет высокие требования к его аппаратно-алгоритмическому обеспечению и, в общем случае, требует наличия быстродействующего АЦП и микроконтроллера с большой вычислительной мощностью.
Второй вариант является наиболее простым в реализации, наименее требовательным к его программно-алгоритмическому обеспечению, вычислительной мощности микроконтроллера и позволяет вместо АЦП использовать простейший компаратор.
Третий вариант сложнее второго, но проще первого варианта в части реализации и обеспечивает более высокую точность определения момента начала очередной накачки при формировании стимулов в пачке даже для низких частот следования пачек стимулов.
В каждом из трех вариантов используют одинаковые установки параметров для всех стимулов следующей пачки либо управляют параметрами каждого стимула в следующей пачке раздельно.
Кроме того, в каждом из трех вариантов можно управлять длительностью воздействия. Поскольку изменение параметров свободных колебаний вызывается вариациями подэлектродного импеданса, который, в свою очередь, зависит от местной и общей реакции организма на воздействие, изменение параметров колебаний может служить и критерием длительности воздействия. Например, если в течение некоторого времени не происходит изменений одного или нескольких из указанных параметров, это означает, что реакция на воздействие стабилизировалась и воздействие можно прекратить.
Для практической реализации любого из описанных вариантов осуществления контроля параметров электрических колебаний и адаптивного управления стимулами могут быть использованы серийно выпускаемые аппараты СКЭНАР, например аппарат «СКЭНАР-1-НТ», фрагмент схемы которого показан на фиг. 16 (цепи питания, управления, индикации и прочие второстепенные цепи на фрагменте не показаны).
Микроконтроллер 27 обеспечивает обработку нажатий клавиатуры, индикацию на экране и звуковую, формирование управляющих импульсов, измерение параметров свободных колебаний стимулов, расчет моментов запуска очередной накачки, управление цепями, воздействующими на форму стимулов, и т.д.
Ключ 28 с цепями защиты (соответствует ключу 4 функциональной схемы на фиг. 1) управляет выходным индуктивным накопителем 29, выполненным на автотрансформаторе (соответствует индуктивному накопителю 1 с внутренним сопротивлением 2 функциональной схемы на фиг. 1).
Ключи 30-33 совместно с резисторами 34-37 и конденсатором 38 образуют переключаемые RC-цепочки и обеспечивают управление формой стимулов (демпфирование), как это было описано выше.
На элементах 39 и 40 выполнен компаратор, выделяющий моменты перехода через нуль свободных колебаний стимулов. Через резистор 41 на вход компаратора поступает сигнал с активного электрода 42. Пассивный электрод 43 подключен к цепям питания.
На фиг. 17 показана форма стимулов 44 на нагрузке, имитирующей межэлектродный импеданс и выходной сигнал 45 компаратора 40.
На верхней осциллограмме серым цветом показана «нулевая линия» 46 - примерный уровень переключения компаратора. Вертикальные линии 47 показывают моменты этих переключений. Таким образом, выходной сигнал компаратора дает непосредственную информацию о моментах перехода колебаний через нуль. Моменты же достижения колебаниями минимумов и максимумов легко определить простейшими вычислениями (полусуммой времен соответствующих переходов через нуль). Принцип таких вычислений поясняется на фиг. 18. На осциллограмме 48 в качестве примера выделено второе колебание, которое в увеличенном виде представлено на врезке 49. Начало второго колебания, его середина и конец обозначены 50, 51 и 52 соответственно. Половины временных интервалов между началом и серединой, а также между серединой и концом этого колебания обозначены 53 и 54 соответственно. Эти моменты, как видно на врезке 49, соответствуют максимуму (53) и минимуму (54) амплитуды второго колебания и рассчитываются микроконтроллером как полусумма времен переходов через нуль 50 и 51, а также 51 и 52 соответственно.
Таким образом, аппарат «СКЭНАР-1-НТ» без каких бы то ни было изменений в схемотехнике позволяет реализовать второй и третий варианты предлагаемого способа. Для реализации первого варианта вместо компаратора необходимо использовать аналого-цифровой преобразователь с временем преобразования менее 1 мкс, подключенный к микроконтроллеру по параллельному или последовательному интерфейсу (например, МАХ153).
Предлагаемый способ электровоздействия обеспечивает возможность осуществления адаптивного управления стимулами в соответствии с текущими значениями параметров электрических колебаний. При этом повышается степень адаптации стимулирующего воздействия электрических импульсов к функциональному состоянию стимулируемых тканей биологического объекта, благодаря чему повышается терапевтический эффект от электровоздействия и обеспечивается необходимый уровень комфортности для пациентов при выполнении СКЭНАР-терапии.
Предлагаемый способ может быть применен как в существующих, так и во вновь создаваемых аппаратах для оказания общерегулирующего воздействия и лечения широкого круга заболеваний, в том числе для обезболивания, ускорения заживления ожогов, переломов, а также при реабилитации после физических нагрузок и травм.
Реферат
Группа изобретений относится к физиотерапии, а именно к способам электроимпульсного воздействия на живой организм. Способ адаптивного электровоздействия включает установку электродов на ткани биологического объекта и пропускание через них пачек электрических стимулов, формируемых при помощи индуктивного накопителя в виде катушки индуктивности, или трансформатора, или автотрансформатора, управление длительностью воздействия и/или параметрами стимулов в зависимости от параметров свободных колебаний, возникающих в колебательном контуре, образованном индуктивностью накопителя и импедансом межэлектродных тканей, при этом в первом варианте выполнения способа измеряют параметры свободных колебаний во время воздействия текущей пачки стимулов и в соответствии с результатами этих измерений управляют параметрами стимулов в этой же пачке и/или в любых последующих пачках стимулов, в том числе управляют моментом начала очередного стимула в пачке в зависимости от фазы свободных колебаний предыдущего стимула. Во втором варианте выполнения измеряют параметры свободных колебаний последнего стимула пачки. В третьем варианте выполнения способа по окончании пачки и до начала следующей формируют зондирующий стимул, измеряют параметры его свободных колебаний. Использование изобретений позволяет повысить эффективность электровоздействия. 3 н. и 3 з.п. ф-лы, 18 ил.
Формула
Документы, цитированные в отчёте о поиске
Адаптивный электростимулятор
Комментарии