Система установки рабочего цилиндра в заданное положение, применение системы и машина - RU2448282C2
Код документа: RU2448282C2
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к системе, которая определена в ограничительной части пункта 1 формулы изобретения. Изобретение также относится к применениям системы, которые определены в ограничительных частях пунктов 9, 10 и 11. Кроме того, изобретение относится к машине, которая определена в ограничительной части пункта 12 формулы изобретения.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Из уровня техники известны системы установки в заданное положение рабочих цилиндров в различных машинах. Рабочий цилиндр представляет собой гидравлический цилиндр, который приводит в действие инструмент машины. Такой рабочий цилиндр содержит камеру для рабочей текучей среды и шток рабочего поршня для регулировки объема указанной камеры. Система обычно содержит перекачивающее устройство какого-либо типа, такое как насос, для подачи гидравлической текучей среды в рабочий цилиндр для того, чтобы перемещать шток его рабочего поршня и, в конечном итоге, приводить в действие инструмент машины, присоединенный к штоку рабочего поршня. Гидравлическая текучая среда направляется между перекачивающим устройством и рабочим цилиндром по гибкому гидравлическому трубопроводу, который может содержать клапан или клапаны для управления потоком гидравлической текучей среды.
Например, в публикации FI 111610 В раскрыта упомянутая выше система, в которой гидравлический перекачивающий цилиндр служит в качестве перекачивающего устройства. Он содержит камеру для текучей среды и шток, который может перемещаться для регулировки объема указанной камеры. Камера для текучей среды перекачивающего цилиндра через гибкий гидравлический трубопровод и клапан или группу клапанов соединена с камерой для рабочей текучей среды для перекачки гидравлической текучей среды между камерой для текучей среды перекачивающего цилиндра и камерой для рабочей текучей среды.
В публикации FI 111610 В назначение рабочего цилиндра состоит в том, чтобы регулировать путем удлинения и укорочения рабочего цилиндра предварительную нагрузку пружины, которая поворачивает лезвия для снятия коры по направлению к бревну, с которого должна быть снята кора. Регулирующий элемент, который можно перемещать в осевом направлении, так называемый осевой подшипник, присоединен к ротору машины, снимающей кору, и осевое перемещение этого элемента удлиняет/укорачивает перекачивающие цилиндры, предусмотренные во вращающемся роторе, и, при увеличении/уменьшении объема камеры для текучей среды перекачивающих цилиндров гидравлическая текучая среда через гибкий гидравлический трубопровод удлиняет/укорачивает рабочие цилиндры для установки их длины, соответствующей регулировке давления лезвий, снимающих кору.
Проблема системы, соответствующей упомянутой публикации, состоит в том, что в ней предпринята попытка выполнения регулировки давления лезвия во время работы по результатам измерения давления во внешней гидравлической системе, которая перемещает упомянутый выше осевой регулирующий элемент. На деле это не является достаточным основанием для регулировки и не очень хорошо функционирует, то есть недостаточно быстро и точно, потому что упомянутое выше давление совсем не показывает действительного давления гидравлической замкнутой системы, образованной перекачивающими и рабочими цилиндрами и вращающейся вместе с ротором. Когда снятие коры с бревна начинается, это создает сильные и неожиданные силы, отгибающие лезвия наружу, которые передаются как удар давления из рабочего цилиндра в перекачивающий цилиндр и поэтому создают нагрузку на подшипник осевого регулирующего элемента. Также во время снятия коры внезапные и сильные флуктуации давления передаются подшипнику осевого регулирующего элемента. В примере варианта выполнения согласно фиг.4 публикации FI 111610 В между перекачивающим цилиндром и рабочим цилиндром размещен аккумулятор давления. Аккумулятор давления до некоторой степени компенсирует удары давления, но недостаточно, создавая тяжелую нагрузку на осевой подшипник.
Дополнительной проблемой известных систем для установки в заданное положение рабочих цилиндров обычно является их сложность, которая делает их очень дорогими.
При установке в заданное положение используемой для этого величиной часто является давление на рабочей стороне, измерить которое во многих случаях трудно или совершенно невозможно, как, например, когда рабочий цилиндр установлен в недоступном месте, таком как вращающаяся или дистанционно управляемая часть машины.
ЦЕЛЬ ИЗОБРЕТЕНИЯ
Целью изобретения является устранение недостатков, отмеченных выше.
Одной конкретной целью изобретения является создание системы, которая дает возможность точной и быстрой установки в заданное положение гидравлического рабочего цилиндра.
Дополнительной целью изобретения является создание системы, по возможности недорогой и простой, для установки в заданное положение гидравлического рабочего цилиндра.
Дополнительной целью изобретения является создание системы, в которой полностью предотвращена передача флуктуации давления из рабочего цилиндра в перекачивающий цилиндр.
Еще одной целью изобретения является создание машины, в которой сжимающие щеки захватного устройства могут быть установлены в заданное положение, а их сжимающее давление точно отрегулировано.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Система в соответствии с изобретением отличается тем, что представлено в пункте 1 формулы изобретения. Применения ее в соответствии с изобретением указаны в пунктах 9, 10 и 11 формулы изобретения. Машина в соответствии с изобретением отличается тем, что представлено в пункте 12 формулы изобретения.
Изобретение относится к системе для установки в заданное положение рабочего цилиндра. Рабочий цилиндр - это гидравлический цилиндр, который приводит в действие инструмент машины. Рабочий цилиндр содержит камеру для рабочей текучей среды и шток рабочего поршня для регулировки объема указанной камеры путем перемещения штока рабочего поршня. Система содержит перекачивающее устройство для перекачивания текучей среды в рабочий цилиндр для перемещения штока рабочего поршня и гибкий гидравлический трубопровод для направления текучей среды между перекачивающим устройством и рабочим цилиндром. Система также содержит клапан или группу клапанов для управления потоком текучей среды в гибком гидравлическом трубопроводе. Перекачивающее устройство представляет собой перекачивающий цилиндр, который является гидравлическим цилиндром и содержит камеру для текучей среды и шток, который выполнен с возможностью перемещения для регулировки объема указанной камеры, которая присоединена через гибкий гидравлический трубопровод и клапан или группу клапанов к камере для рабочей текучей среды для перекачивания гидравлической текучей среды между камерой для текучей среды перекачивающего цилиндра и камерой для рабочей текучей среды.
В соответствии с изобретением клапан или группа клапанов содержит средства обеспечения свободной подачи гидравлической текучей среды из камеры для текучей среды перекачивающего цилиндра в камеру для рабочей текучей среды, предотвращения обратного потока гидравлической текучей среды из камеры для рабочей текучей среды в камеру для текучей среды перекачивающего цилиндра, когда давление гидравлической текучей среды поднимается выше заданного предельного давления на стороне управления, которая является стороной перекачивающего устройства относительно клапана или группы клапанов, и обеспечения свободного обратного потока гидравлической текучей среды из камеры для рабочей текучей среды в камеру для текучей среды перекачивающего цилиндра, когда давление гидравлической текучей среды на указанной стороне управления становится ниже заданного предельного давления.
Система может быть использована, например, в машине для снятия древесной коры типа ротор-отверстие для установки в заданное положение рабочих цилиндров лезвий, снимающих кору, для точной регулировки их положения и/или рабочего усилия. Система также может быть использована для установки в заданное положение рабочих цилиндров, приводящих в действие сжимающие щеки гидравлических захватов машины для точной регулировки положения и/или сжимающего усилия сжимающих щек. Кроме этого, система также может быть использована для установки в заданное положение рабочих цилиндров валов толкателя, подъемных стрел и сочлененных стрел-манипуляторов машины.
Изобретение также относится к машине, которая содержит захватное устройство. Захватное устройство содержит основание захватного устройства и по меньшей мере одну пару сжимающих щек, соединенных с основанием захватного устройства с возможностью поворота вокруг взаимно параллельных осей. Каждый рабочий цилиндр присоединен на одном конце к основанию захватного устройства, а на другом конце - к сжимающей щеке для сближения сжимающих щек для захвата объекта и, соответственно, разведения для освобождения объекта. Каждый рабочий цилиндр представляет собой гидравлический цилиндр и содержит камеру для рабочей текучей среды и шток рабочего поршня, предназначенный для регулировки объема указанной камеры путем его перемещения. Машина дополнительно содержит систему установки в заданное положение рабочих цилиндров. Система содержит перекачивающее устройство, предназначенное для перекачивания гидравлической текучей среды в рабочий цилиндр, для перемещения штока рабочего поршня, гибкий гидравлический трубопровод, предназначенный для направления гидравлической текучей среды между перекачивающим устройством и рабочим цилиндром, и клапан или группу клапанов, предназначенных для управления потоком текучей среды в гибком гидравлическом трубопроводе. Система образует замкнутый гидравлический контур.
В соответствии с изобретением, перекачивающее устройство представляет собой перекачивающий цилиндр, который является гидравлическим цилиндром и содержит камеру для текучей среды и шток, который выполнен с возможностью перемещения для регулировки объема указанной камеры. Камера для текучей среды перекачивающего цилиндра через гибкий гидравлический трубопровод и клапан или группу клапанов соединена с камерой для рабочей текучей среды для перекачивания гидравлической текучей среды между камерой для текучей среды перекачивающего цилиндра и камерой для рабочей текучей среды. Клапан или группа клапанов содержит средства обеспечения свободной подачи гидравлической текучей среды из камеры для текучей среды перекачивающего цилиндра в камеру для рабочей текучей среды, предотвращения обратного потока гидравлической текучей среды из камеры для рабочей текучей среды в камеру для текучей среды перекачивающего цилиндра, когда давление гидравлической текучей среды на стороне управления становится выше заданного предела, причем указанной стороной управления является сторона перекачивающего устройства относительно клапана или группы клапанов, и обеспечения свободного обратного потока гидравлической текучей среды из камеры для рабочей текучей среды в камеру для текучей среды перекачивающего цилиндра, когда давление гидравлической текучей среды на указанной стороне управления падает ниже заданного предела.
Преимущество изобретения состоит в том, что шток рабочего поршня исключительно точно повторяет перемещение и положение штока поршня перекачивающего цилиндра. Клапан или группа клапанов предотвращает возможные флуктуации давления из-за передачи с рабочей стороны на сторону управления. Рабочей стороной является сторона рабочего цилиндра в системе относительно клапана или группы клапанов.
В одном варианте выполнения системы средства обеспечения свободной подачи гидравлической текучей среды содержат обратный клапан, который обеспечивает свободную подачу гидравлической текучей среды из камеры для текучей среды перекачивающего цилиндра в камеру для рабочей текучей среды и предотвращает ее обратный поток.
В одном варианте выполнения системы средства предотвращения и обеспечения обратного потока гидравлической текучей среды из камеры для рабочей текучей среды в камеру для текучей среды перекачивающего цилиндра содержат клапан контроля давления, такой как обратный клапан контроля давления или подобный ему, управляющим давлением которого является давление стороны управления.
В одном варианте выполнения система содержит приводное устройство, предназначенное для перемещения штока поршня перекачивающего цилиндра.
В одном варианте выполнения системы приводное устройство представляет собой механическое, электрическое, гидравлическое и/или пневматическое линейное приводное устройство.
В одном варианте выполнения система содержит детектор положения, предназначенный для определения положения штока поршня перекачивающего цилиндра, для точного определения положения штока рабочего поршня.
В одном варианте выполнения система содержит манометр для измерения гидравлического давления на рабочей стороне.
В одном варианте выполнения система содержит несколько рабочих цилиндров.
В одном варианте выполнения машины средства обеспечения свободной подачи гидравлической текучей среды содержат обратный клапан, который обеспечивает свободную подачу гидравлической текучей среды из камеры для текучей среды перекачивающего цилиндра в камеру для рабочей текучей среды и предотвращает ее обратный поток.
В одном варианте выполнения машины средства предотвращения и обеспечения обратного потока гидравлической текучей среды из камеры для рабочей текучей среды в камеру для текучей среды перекачивающего цилиндра содержат клапан контроля давления, такой как обратный клапан контроля давления или подобный ему, управляющим давлением которого является давление стороны управления.
В одном варианте выполнения машины система содержит детектор положения, предназначенный для определения положения штока поршня перекачивающего цилиндра для точного определения положения штока рабочего поршня.
В одном варианте выполнения машины система содержит детектор давления, предназначенный для обнаружения гидравлического давления на стороне управления, для регулировки сжимающего давления захватного устройства.
В одном варианте выполнения машины захватное устройство предназначено для захвата достаточно тяжелых цилиндрических объектов, таких как рулон бумаги.
В одном варианте выполнения машины захватное устройство предназначено для захвата достаточно легко сжимаемых объектов, таких как картонная коробка.
В одном варианте выполнения машина представляет собой автопогрузчик.
В одном варианте выполнения машина содержит вал толкателя, подъемную стрелу и/или шарнирно сочлененную стрелу-манипулятор, на одном конце которых расположено захватное устройство.
В одном варианте выполнения машина представляет собой колесное транспортное средство, к которому присоединен вал толкателя, подъемная стрела и/или шарнирно сочлененная стрела-манипулятор.
В одном варианте выполнения машина является устройством, выполненным с возможностью погружения в воду, снабженным захватывающим манипулятором, на одном конце которого расположено захватное устройство.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение подробно описано с помощью примеров вариантов его выполнения со ссылками на прилагаемые чертежи, на которых:
Фиг.1 изображает гидравлическую схему первого варианта выполнения системы в соответствии с изобретением,
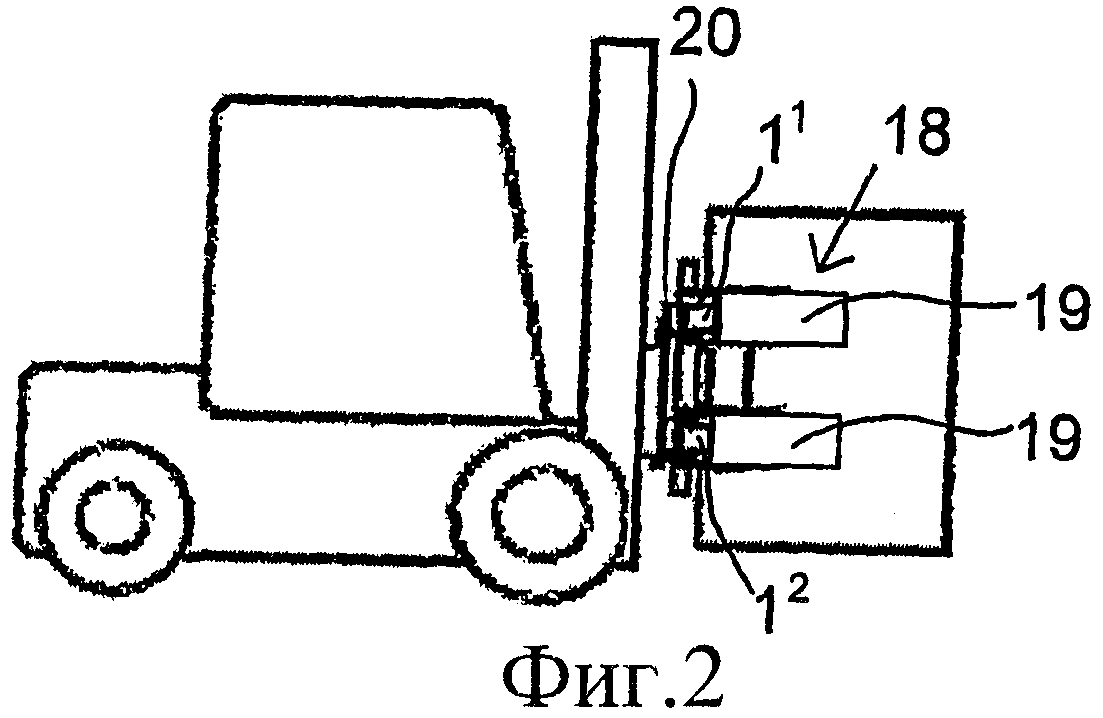
Фиг.2 упрощенно изображает вид сбоку машины, а именно автопогрузчика с вилочным подъемником, снабженного захватным устройством для рулона бумаги,
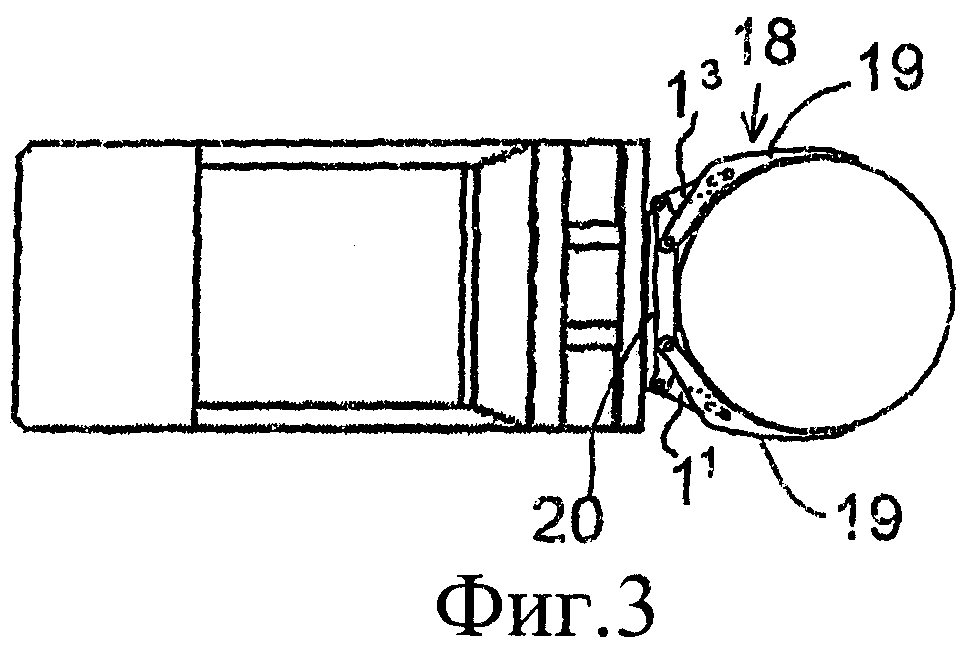
Фиг.3 изображает вид сверху автопогрузчика с вилочным подъемником, изображенного на фиг.2,
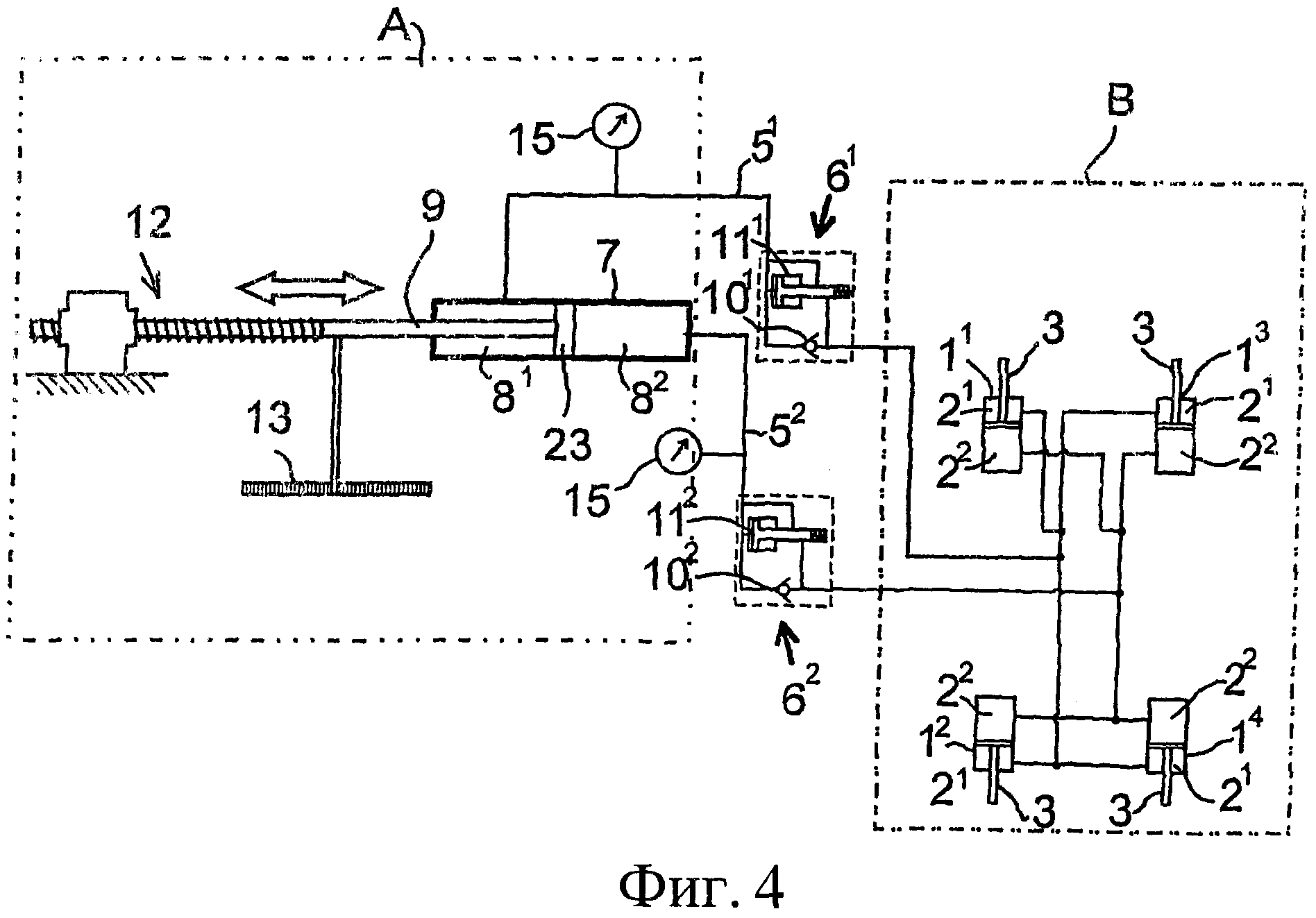
Фиг.4 изображает гидравлическую схему машины, изображенной на фиг.2, основанную на втором варианте выполнения системы в соответствии с изобретением,
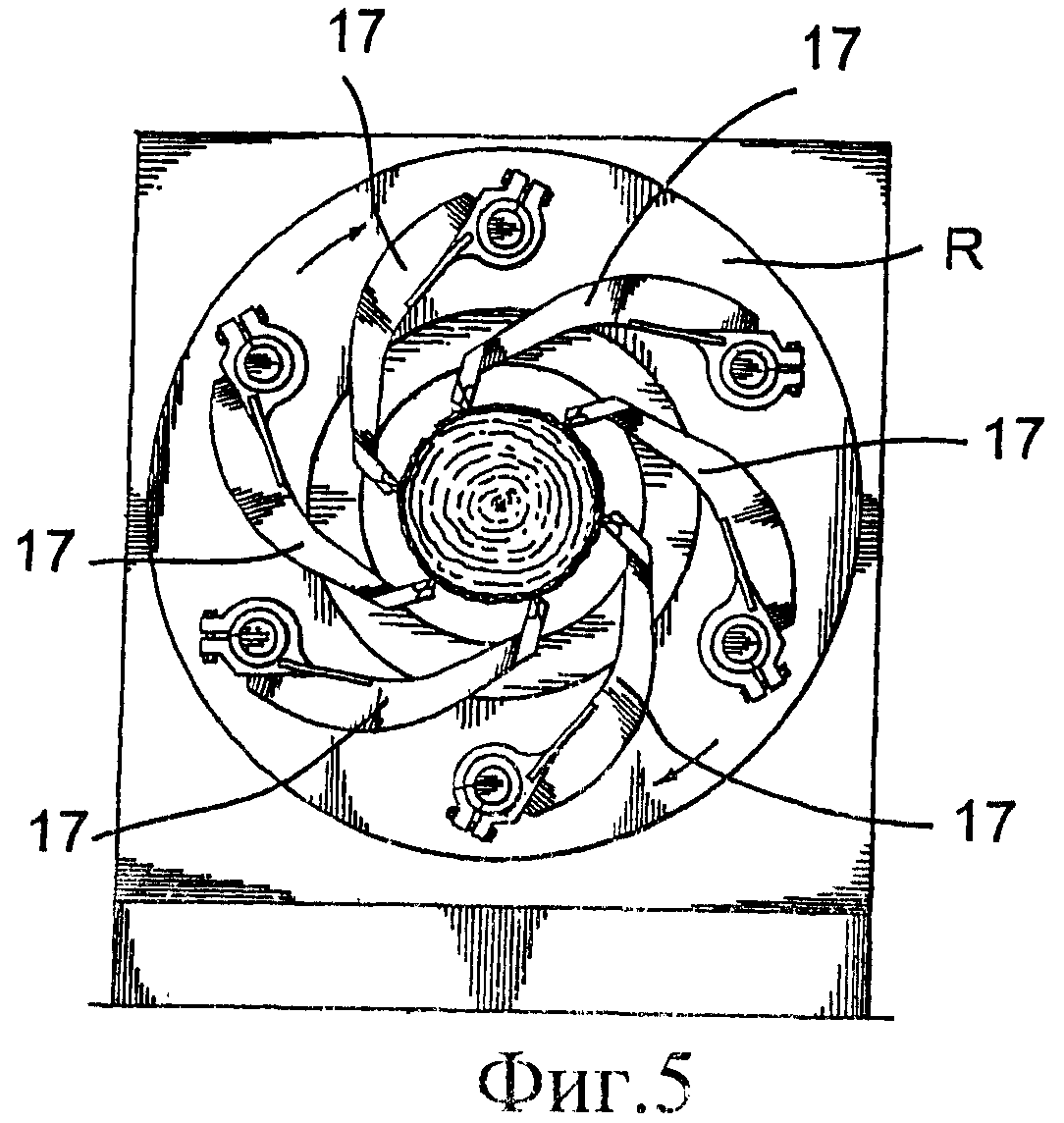
Фиг.5 упрощенно изображает машину для снятия древесной коры, и
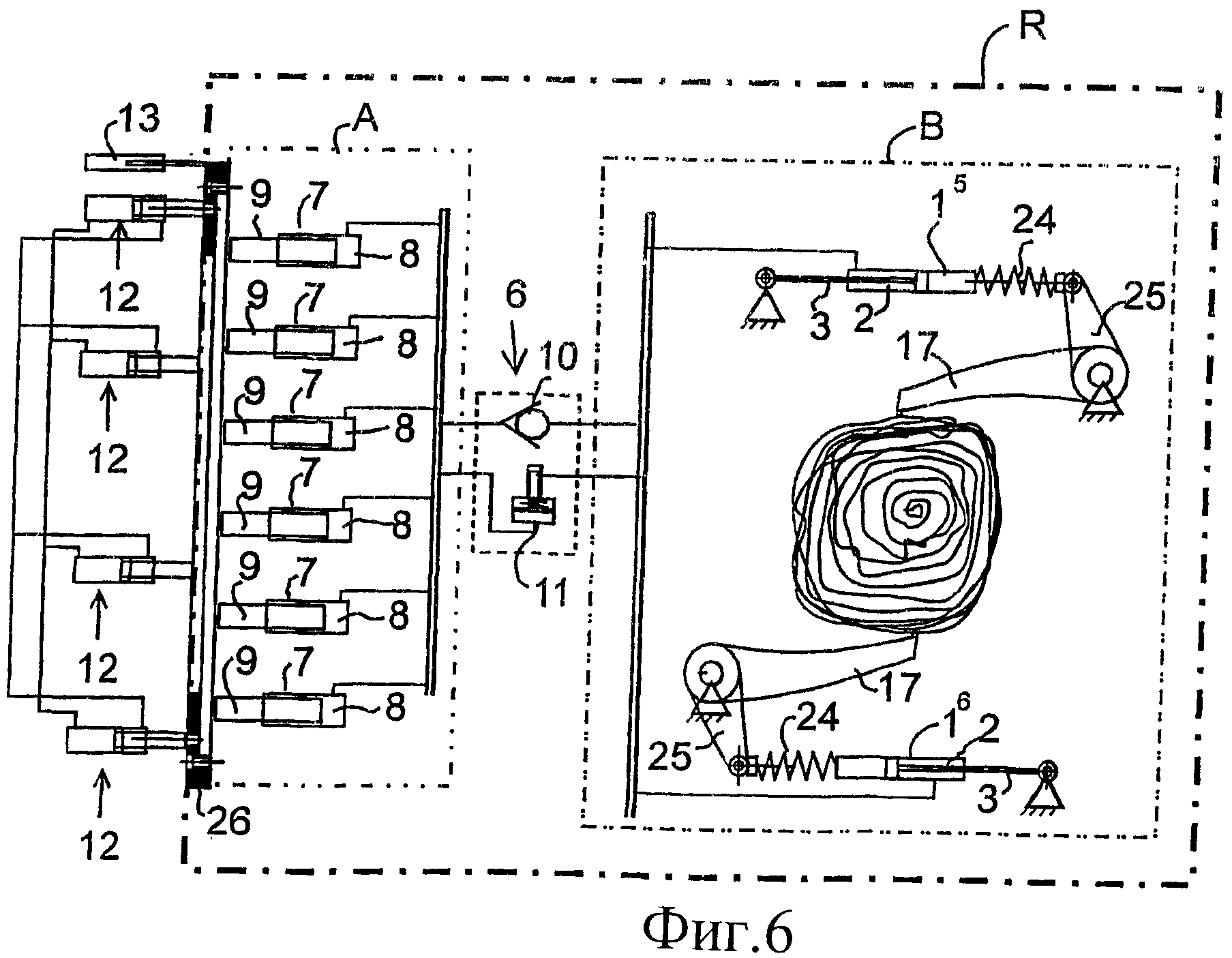
Фиг.6 изображает часть гидравлической схемы машины, изображенной на фиг.5, основанную на третьем варианте выполнения системы в соответствии с изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фиг.1 упрощенно изображает вид системы установки в заданное положение рабочего цилиндра 1. Пример содержит рабочий цилиндр 1 и стол 21, который прикреплен к штоку 3 рабочего поршня цилиндра и на верхней части которого размещена масса 22. Рабочий цилиндр содержит камеру 2 для рабочей текучей среды. Объем камеры 2 можно регулировать перемещением штока 3 рабочего поршня. Система содержит гидравлический перекачивающий цилиндр 7, шток 9 поршня перекачивающего цилиндра, который может перемещаться для перекачивания гидравлической текучей среды из камеры 8 для текучей среды перекачивающего цилиндра 7 в камеру 2 и из камеры 2 обратно в камеру 8 с обеспечением вертикального перемещения штока 3 и прикрепленного к нему стола 21 в подходящее положение. Гидравлическая текучая среда направляется между перекачивающим цилиндром 7 и рабочим цилиндром 1 через гибкий гидравлический трубопровод 5. Гибкий гидравлический трубопровод 5 снабжен клапаном 6 или группой клапанов для управления потоком гидравлической текучей среды. Система образует замкнутый гидравлический контур.
Группа клапанов 6 содержит обратный клапан 10, который обеспечивает свободную подачу гидравлической текучей среды из камеры 8 в камеру 2, но предотвращает обратный поток. Клапан 11 контроля давления, в свою очередь, предотвращает обратный поток гидравлической текучей среды из камеры 2 в камеру 8 в том случае, когда давление гидравлической текучей среды на стороне А управления поднимется выше заданного предела. Таким образом, управляющим давлением клапана 11 контроля давления является давление на стороне А управления. Стороной А управления, которая на фиг.1 обозначена штрих-пунктирной линией (три точки - два штриха), является сторона перекачивающего цилиндра 7 относительно клапана или группы клапанов 6, 10, 11. Клапан 11 контроля давления дает возможность свободного обратного течения гидравлической текучей среды из камеры 2 в камеру 8 в том случае, когда давление гидравлической текучей среды на упомянутой стороне А управления падает ниже заданного предельного давления, что происходит, как только давление в камере 8 перекачивающего цилиндра 7 понижается вследствие перемещения штока 9 поршня перекачивающего цилиндра, так что возрастает объем камеры 8. Шток 3 рабочего поршня точно следует за движением штока 9, и клапан или группа клапанов 6, 10, 11 предотвращают возможные флуктуации давления от перекачки с рабочей стороны В на сторону А управления. Рабочей стороной В является сторона рабочего цилиндра 1 относительно клапана или группы клапанов 6, 10, 11, которая обозначена на фиг.1 штрих-пунктирной линией (две точки - один штрих). Шток 9 может перемещаться с помощью любого подходящего приводного устройства 12. Приводное устройство 12 может быть любым подходящим механическим, электрическим, гидравлическим и/или пневматическим линейным приводным устройством. Положение штока 9 может быть определено с помощью детектора 13 положения. Если положение штока 9 известно, то также известно точное положение штока 3 и, следовательно, стола 21. Пользователь может следить за детектором 13 положения для регулировки положения стола 21. Рабочий цилиндр 1 может быть установлен на большом расстоянии от перекачивающего цилиндра 7, так что можно осуществить удаленное и очень точное управление различными инструментами, которые могут быть расположены в совершенно недоступных местах.
Предпочтительно, чтобы клапан или группа клапанов 6 были физически расположены вблизи рабочего цилиндра 1 с тем, чтобы мог быть использован гибкий гидравлический трубопровод с низким сопротивлением давлению.
На фиг.2 и 3 машиной является вилочный автопогрузчик, снабженный захватным устройством 18. В этом примере захватным устройством 18 является захватное устройство для рулона бумаги. Захватное устройство 18 содержит основание 20 и две пары сжимающих щек 19, присоединенных к основанию с возможностью поворота относительно взаимно параллельных осей. Каждый рабочий цилиндр 11, 12, 13, 14 на одном конце присоединен к основанию 20 захватного устройства, а на другом конце - к сжимающей щеке 19, так что рабочие цилиндры 11, 12, 13, 14 могут быть использованы для сближения сжимающих щек 19 для того, чтобы захватить рулон бумаги, и, соответственно, для удаления их друг от друга, чтобы освободить рулон бумаги. Точная установка в заданное положение сжимающих щек 19 является исключительно важной. Во-первых, точная установка в заданное положение делает возможной регулировку щек таким образом, что они не будут касаться других рулонов, близких к рулону, который нужно захватить. Во-вторых, когда щеки осуществили захват, точная установка в заданное положение обеспечивает достаточное сжимающее усилие, так что рулон бумаги не соскользнет вниз между щеками. Такое соскальзывание портит верхние слои рулона. Поэтому захват должен быть плотным, но не слишком, так чтобы рулон бумаги не оказался сдавленным между щеками. То же самое относится к захватным устройствам для картонных коробок, которые зажимают их противоположные стороны. При этом требуется исключительно точная регулировка сжимающего усилия, достигаемая путем точной установки в заданное положение, так чтобы не были смяты и повреждены коробки и их содержимое.
Как на примере, изображенном на фиг.1, каждый из четырех показанных рабочих цилиндров 11, 12, 13, 14 является гидравлическим цилиндром, который содержит камеру 2 и шток 3 для регулировки объема камеры 2 путем перемещения штока рабочего поршня.
Изображенная на фиг.4 система установки в заданное положение содержит перекачивающий цилиндр 7 для перекачивания гидравлической текучей среды в рабочие цилиндры 11, 12, 13, 14 для перемещения их штоков 3. Следует отметить, что на схеме изображены только части, являющиеся основными для функционирования изобретения, которое может содержать и другие составные части. Однако, существенная особенность системы состоит в том, что она образует замкнутый гидравлический контур. Поток гидравлической текучей среды в гибком гидравлическом трубопроводе 5 контролируется с помощью клапана или группы клапанов 6. Перекачивающий цилиндр 7 здесь является гидравлическим цилиндром двойного действия. Перекачивающий цилиндр 7 содержит две камеры 81, 82 для текучей среды, расположенные на каждой стороне поршня 23, и шток 9, который может перемещаться для регулировки объема камер 81, 82. Первая камера 81 соединена через первый гибкий гидравлический трубопровод 51 и первый клапан или группу клапанов 101, 111 с первой камерой 21 для рабочей текучей среды рабочих цилиндров 11, 12, 13, 14 двойного действия, так что гидравлическая текучая среда может перекачиваться между первой камерой 81 и первыми камерами 21. Обратный клапан 101 дает возможность свободной подачи гидравлической текучей среды от первой камеры 81 в первую камеру 21 и предотвращает обратный поток. Клапан 111 контроля давления предотвращает обратный поток гидравлической текучей среды из первой камеры 21 в первую камеру 81 в том случае, когда давление гидравлической текучей среды на стороне А управления поднимется выше заданного предела. Клапан 111 контроля давления обеспечивает свободный обратный поток гидравлической текучей среды из первой камеры 21 в первую камеру 81 в том случае, когда давление гидравлической текучей среды на упомянутой стороне управления А падает ниже заданного предела.
Соответственно, вторая камера 82 для текучей среды перекачивающего цилиндра присоединена через второй гибкий гидравлический трубопровод 52 и второй клапан или группу клапанов 102, 112 ко второй камере 22 для рабочей текучей среды рабочих цилиндров 11, 12, 13, 14 двойного действия, так что гидравлическая текучая среда может быть перекачана между второй камерой 82 и второй камерой 22. Обратный клапан 102 дает возможность свободной подачи гидравлической текучей среды от второй камеры 82 в камеру 22 и предотвращает обратный поток. Клапан 112 контроля давления предотвращает обратный поток гидравлической текучей среды из второй камеры 22 во вторую камеру 82 в том случае, когда давление гидравлической текучей среды на стороне А управления поднимается выше заданного предела. Клапан 112 контроля давления обеспечивает свободный обратный поток гидравлической текучей среды из второй камеры 22 во вторую камеру 82 в том случае, когда давление гидравлической текучей среды на упомянутой стороне управления А падает ниже заданного предела. Поэтому штоки 3 рабочих поршней близко следуют за движением штока 9. Система, изображенная на фиг.4, также содержит детектор 13 положения для обнаружения положения штока 9 поршня перекачивающего цилиндра для определения точного положения штока 3 рабочего поршня. На фиг.4 изображено электрическое приводное устройство с шариковым винтом, предназначенное для перемещения штока 9 поршня перекачивающего цилиндра 7. По сравнению с гидравлическим приводным устройством, электрический привод обеспечивает то преимущество, что нет необходимости тянуть гибкие гидравлические трубопроводы к труднодоступному месту, так как вместо них требуется только электрический провод для того, чтобы подвести электрическую энергию к приводному устройству.
Система также содержит детектор 15 давления для обнаружения гидравлического давления на стороне А управления для того, чтобы точно отрегулировать сжимающее давление, прикладываемое к объекту со стороны захватывающих щек. Детектором давления может быть датчик давления, который выдает сигнал на устройство управления. Для ограничения сжимающего давления на стороне А управления может быть установлена максимальная величина давления, которая не может быть превышена и может быть использована в автоматизированной системе устройством управления для регулировки приводного устройства 12 для регулировки давления рабочей стороны В и, следовательно, сжимающего давления захватывающих щек, так чтобы рабочий цилиндр не использовал избыточную мощность. Как вариант, детектор 15 давления может быть манометром, за показаниями которого пользователь может следить для того, чтобы регулировать приводное устройство 12, используя устройство ручного управления. Когда захватное устройство выполнило захват объекта, но еще нет какого-либо сжимающего давления, оно регулируется с использованием детектора давления. Регулировка сжимающего давления при этом будет выполнена путем перемещения штока поршня перекачивающего цилиндра с помощью приводного устройства.
Фиг.5 и 6 изображают в качестве еще одного варианта выполнения изобретения машину типа ротор-отверстие для снятия коры с древесного ствола. Бревно подают перпендикулярно плоскости изображения на фиг.5 через центральное отверстие вращающегося ротора R, так что окорочные лезвия 17, присоединенные к ротору R с возможностью поворота, снимают кору с бревна.
Фиг.6 изображает систему для установки в заданное положение рабочих цилиндров 1. Каждый рабочий цилиндр 1 присоединен через пружину 24 к качающемуся рычагу 25, который жестко присоединен к окорочному лезвию 17. Рабочий цилиндр 1 регулирует растяжение пружины 24 и, посредством этого, положение лезвий, равно как и давление лезвия на бревно.
Растяжение пружин 24 может быть полностью изменено независимо от давления в рабочих цилиндрах 1. Давление окорочных лезвий на бревно может быть изменено при непрерывном контроле на протяжении всей длины бревна, и требуемое давление может быть рассчитано и изменено в любое время независимо от нагрузки. Расчеты и регулировки, таким образом, легко могут быть автоматизированы.
Клапан 6 дает возможность свободного перемещения текучей среды со стороны А управления в рабочие цилиндры 1, но предотвращает передачу мгновенного давления, действующего в рабочих цилиндрах 1, назад в систему управления, предотвращая таким образом любые не являющиеся необходимыми нагрузки на сторону А управления без какого-либо воздействия на выполнение регулировки. Отправной точкой для функционирования клапана 6 является установка на уровень предельного давления, так что подаваемое давление ниже предельного уровня обеспечивает возможность обратного потока гидравлической текучей среды из рабочих цилиндров назад на сторону управления, снижая, таким образом, количество текучей среды, действующей в рабочих цилиндрах 1, и расширяя, посредством этого, протяженность свободного положения соединения, образованного пружиной 24 и рабочим цилиндром 1 и создающего нагрузку на лезвия. Давление лезвий на бревно может регулироваться во время работы от нуля до максимальной величины абсолютно непрерывно. Система регулирует растяжение пружин, создающих нагрузку на лезвия, меняя длину рабочих цилиндров, отходящих от пружин, на основе количества гидравлической текучей среды в камерах 2 для рабочей текучей среды, и не зависит от флуктуации давления в рабочих цилиндрах 1, вызванных созданной на машину нагрузкой.
Перекачивающие цилиндры 7 подают требуемое количество гидравлической текучей среды, которое измеряется датчиком 13 положения. Обратный клапан 10 позволяет текучей среде свободно перетекать в цилиндры 1, которые регулируют давление лезвий и предварительно нагружают пружины 24 соответственно количеству поданной в них текучей среды. Чем больше количество текучей среды в камерах 2 для рабочей текучей среды рабочих цилиндров 1, которые создают нагрузку на пружины, то есть чем меньше длина рабочего цилиндра 1, тем больше сила, используемая пружинами 24 для прижатия лезвий 17 к бревну, с которого снимается кора. Клапан 11 контроля давления перекрывает течение в обратном направлении каждый раз, когда подаваемое давление превышает предельное значение, установленное для клапана 11. Для уменьшения давления лезвий может быть уменьшено количество текучей среды в рабочем цилиндре 1 путем увеличения количества текучей среды в камере 8 для текучей среды перекачивающего цилиндра 7 до величины, соответствующей требуемому количеству текучей среды, так что подаваемое давление падает ниже упомянутого ранее предельного давления, и, так как обратный поток быстро наполняет незаполненную часть объема, образовавшуюся в перекачивающем цилиндре 7, давление опять возрастает до тех пор, пока не станет соответствовать предельному давлению, останавливая, таким образом, обратный поток при требуемом количестве. Система образует замкнутый гидравлический контур.
Предпочтительно, чтобы усилие было направлено к перекачивающему цилиндру 7 с помощью отдельного осевого подшипника 26, который может быть нагружен по оси в обоих направлениях путем его осевого сдвига, в соответствии с описанием патента FI 111610 В, однако усилие может быть также приложено к перекачивающему цилиндру 7 или клапану 6; 10, 11 с помощью давления масла с использованием вращающегося соединителя между статором и ротором. В последнем случае система эффективно предотвращает воздействие сильных флуктуаций давления на рабочей стороне В на соединитель, которые могут привести к утечке гидравлической текучей среды и другим подобным проблемам.
Изобретение не ограничивается только примерами вариантов его выполнения, описанными выше; напротив, возможны многие изменения в пределах объема изобретения, определенного формулой изобретения.
Реферат
Система, применение системы предназначены для установки рабочего органа машины, например, типа ротор-отверстие для снятия древесной коры или подъемных стрел и шарнирно сочлененных стрел-манипуляторов в заданное положение. В системе, содержащей рабочий цилиндр (1), клапан или группа клапанов (6; 10, 11) содержит средства подачи гидравлической текучей среды из камеры (8) перекачивающего цилиндра (7) в камеру (2) рабочего цилиндра (1), предотвращающие обратный поток гидравлической текучей среды из камеры (2) в камеру (8) перекачивающего цилиндра (7), когда давление гидравлической текучей среды на стороне (А) управления поднимается выше заданного предельного давления, и обеспечения свободного обратного потока гидравлической текучей среды из камеры (2) в камеру (8) перекачивающего цилиндра (7), когда гидравлическое давление текучей среды на стороне (А) управления падает ниже заданного предельного давления. Шток (3) рабочего поршня близко следует перемещению штока (9) поршня перекачивающего цилиндра, и клапан или группа клапанов (6; 10, 11) предотвращают передачу флуктуации давления от рабочей стороны (В) на сторону (А) управления. Технический результат - повышение точности установки рабочего органа машины в заданное положение. 5 н. и 15 з.п. ф-лы, 6 ил.
Формула
захватное устройство (18), которое содержит основание (20), по меньшей мере, одну пару сжимающих щек (19), присоединенных к основанию захватного устройства с возможностью поворота вокруг взаимно параллельных осей, и рабочие цилиндры (1:11, 12, 13, 14), каждый из которых присоединен на одном конце к основанию захватного устройства, а на другом конце - к сжимающей щеке, для сближения сжимающих щек для захвата объекта и, соответственно, разведения для освобождения объекта, причем каждый рабочий цилиндр (1) является гидравлическим цилиндром, содержащим камеру (2) для рабочей текучей среды и шток (3) рабочего поршня, предназначенный для регулировки объема указанной камеры (2),
и систему установки в заданное положение рабочих цилиндров (11, 12, 13, 14), содержащую перекачивающее устройство (4; 7), предназначенное для перекачивания гидравлической текучей среды в рабочий цилиндр (11, 12, 13, 14) для перемещения штока (3) рабочего поршня, гибкий гидравлический трубопровод (5), предназначенный для направления гидравлической текучей среды между перекачивающим устройством (4; 7) и рабочим цилиндром, и клапан или группу клапанов (6), предназначенных для управления потоком гидравлической текучей среды в гибком гидравлическом трубопроводе, и образующую замкнутый гидравлический контур, причем система дополнительно содержит детектор (13) для определения точного положения штока (2) рабочего поршня, отличающаяся тем, что перекачивающим устройством (4) является перекачивающий цилиндр (7), который представляет собой гидравлический цилиндр и содержит камеру (8) для текучей среды и шток (9) поршня, выполненный с возможностью перемещения для регулировки объема камеры для текучей среды перекачивающего цилиндра, которая через гибкий гидравлический трубопровод (5) и клапан или группу клапанов (6; 10, 11) соединена с камерой (2) для рабочей текучей среды для перекачивания гидравлической текучей среды между камерой (8) для текучей среды перекачивающего цилиндра и камерой (2) для рабочей текучей среды, при этом клапан или группа клапанов (6; 10, 11) содержит средства обеспечения свободной подачи гидравлической текучей среды из камеры (8) для текучей среды перекачивающего цилиндра в камеру (2) для рабочей текучей среды, предотвращения обратного потока гидравлической текучей среды из камеры (2) для рабочей текучей среды в камеру (8) для текучей среды перекачивающего цилиндра, когда давление гидравлической текучей среды поднимается выше заданного предельного давления на стороне (А) управления, которая является стороной перекачивающего устройства (4; 7) относительно клапана или группы клапанов (6; 10, 11), и обеспечения свободного обратного потока гидравлической текучей среды из камеры (2) для рабочей текучей среды в камеру (8) для текучей среды перекачивающего цилиндра, когда давление гидравлической текучей среды на указанной стороне (А) управления становится ниже заданного предельного давления; и тем, что детектор (13) положения, для определения точного положения штока (2) рабочего поршня выполнен с возможностью определения положения штока (8) поршня перекачивающего цилиндра.
Комментарии