Устройство для вакуумного закупоривания медицинского контейнера - RU2760614C2
Код документа: RU2760614C2
Чертежи





Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к устройству для закупоривания медицинского контейнера в виде шприца или тому подобного с использованием вакуума, системе для закупоривания медицинского контейнера, содержащей такое устройство, и способу закупоривания медицинского контейнера таким устройством или системой с использованием вакуума.
УРОВЕНЬ ТЕХНИКИ
Предварительно заполненные инъекционные устройства являются традиционными контейнерами для доставки лекарств или вакцин пациентам и включают в себя шприцы, картриджи и автоинъекторы или тому подобное. Они обычно содержат герметизирующую пробку, со скольжением введенную в контейнер, заполненный фармацевтическим препаратом, чтобы обеспечить персонал готовым к использованию устройством для инъекций пациентам.
Контейнер имеет по существу цилиндрическую форму и содержит проксимальный конец с возможностью закупоривания герметизирующей пробкой, дистальный конец, куда фармацевтический препарат выталкивается из контейнера, и боковую стенку, простирающуюся между проксимальным концом и дистальным концом контейнера. На практике герметизирующая пробка предназначена для перемещения, под давлением, оказываемым штоком плунжера, от проксимального конца корпуса контейнера к дистальному концу корпуса контейнера, с вытеснением при этом содержащегося в корпусе контейнера лекарственного средства.
По сравнению с пустыми инъекционными устройствами, которые заполняются хранящимся в ампуле фармацевтическим препаратом непосредственно перед инъекцией в тело пациента, использование предварительно заполненных инъекционных устройств имеет несколько преимуществ. В частности, за счет ограничения подготовки перед инъекцией, предварительно заполненные инъекционные устройства обеспечивают снижение медицинских ошибок дозирования, минимизацию риска микробного загрязнения и повышенное удобство использования для персонала. Кроме того, такие предварительно заполненные контейнеры могут стимулировать и упрощать самостоятельный прием лекарства пациентами, что позволяет снизить стоимость терапии и улучшить уровень ее соблюдения пациентами. Наконец, предварительно заполненные инъекционные устройства уменьшают потерю ценного фармацевтического препарата, что обычно происходит, когда фармацевтический препарат переносится из ампулы в незаполненное инъекционное устройство. Это приводит к увеличению количества возможных инъекций для данной произведенной партии фармацевтического продукта, со снижением тем самым затрат на закупку и поставку.
Предварительно заполненные инъекционные устройства обычно получают путем заполнения пустого медицинского контейнера требуемым фармацевтическим препаратом, затем закупоривания заполненного контейнера под вакуумом или с помощью вентиляционной трубки или комбинации того и другого.
Используемый в данном документе термин "вакуум" означает низкое давление, значительно ниже атмосферного давления 1013,25 гектопаскаля (гПа) (равного 1,013 бар) и, предпочтительно, близкое к 0 гПа.
Заполненный контейнер в общем случае закупоривают сразу после заполнения лекарственным средством корпуса контейнера с использованием закупоривающих машин согласно следующему способу: медицинский контейнер, который должен быть закупорен, помещают на приспособленную для этого подставку (например, в гнезде или закрепленную непосредственно на закупоривающей машине) проксимальным концом вверх, то есть дистальным концом вниз, и удерживают в этом положении.
В случае закупоривания вентиляционной трубкой пробка сжимается в трубке, обычно называемой "вентиляционной трубой", наружный диаметр которой меньше внутреннего диаметра контейнера, так, чтобы обеспечить циркуляцию воздуха между вентиляционной трубой и контейнером, прежде чем пробка будет установлена в контейнер.
В случае вакуумного закупоривания присасывающаяся манжета, сообщающаяся с камерой переменного давления, устанавливается на дистальном конце контейнера таким образом, чтобы плотно закрывать его. В это время давление внутри камеры переменного давления и давление в участке медицинского контейнера над препаратом, по существу, равны атмосферному давлению Р0. Камера переменного давления соединена с вакуумным насосом или подобным устройством и находится под вакуумом. В результате камера переменного давления и давление в участке медицинского контейнера над препаратом находятся под вакуумом, при давлении Р1, меньшем, чем начальное давление Р0. Герметизирующая пробка, ранее располагавшаяся внутри камеры, перемещается тогда поршневым штоком к проксимальному концу контейнера над препаратом. Нарушение вакуума внутри камеры переменного давления заставляет затем пробку перемещаться дальше вниз по медицинскому контейнеру до достижения равновесия давления: медицинский контейнер после этого закупорен.
Основное преимущество данного способа закупоривания медицинских контейнеров под вакуумом заключается в том, что оставшийся пузырь внутри закупоренного контейнера, образовавшийся из небольшого объема воздуха, оставшегося между пробкой и поверхностью препарата, уменьшается, следовательно, насколько это возможно. Кроме того, из-за малого сжатия пробки, к пробке прикладываются меньшие усилия, что приводит к меньшему количеству дефектов, особенно на пробках с покрытием.
Данный способ осуществляется с использованием больших и тяжелых машин, что подразумевает следующие недостатки.
Лабораторные весовые машины, которые обычно используются в этой области техники, не могут быть подвергнуты стерилизации. Действительно, эти машины не могут быть легко перемещены оператором и не могут быть помещены в автоклав из-за их размеров, массы и конструкции. Они также включают в себя электрические и электронные компоненты, которые не могут быть обработаны в автоклаве.
Кроме того, поскольку процесс вакуумного закупоривания медицинских контейнеров обычно осуществляется в чистых помещениях для обеспечения стерильности медицинских контейнеров, соответствующее оборудование также должно быть размещено в чистых помещениях.
Процесс быстрого и простого выполнения вакуумного закупоривания медицинского контейнера, который не обязательно проводить в стерильных условиях, таким образом, должен быть в любом случае проведен в чистом помещении, так как машины не могут быть перемещены из упомянутых чистых помещений. Например, асептическое заполнение в малых объемах может быть выполнено в не полностью стерильной среде, такой как под колпаком с ламинарным потоком. Такая среда малого объема не позволяет размещать тяжелое оборудование для закупоривания из-за его габаритов, массы и того, что оно не может быть стерилизовано.
Однако работа в чистом помещении очень ограничивает оператора, который должен одеваться соответствующим образом и соблюдать строгие и специфические рабочие процедуры, что значительно удлиняет и усложняет выполнение вакуумного закупоривания.
Как следствие, существует острая потребность в устройстве для вакуумного закупоривания медицинского контейнера, которое можно одновременно стерилизовать и легко и быстро перемещать из одного места в другое, чтобы использовать без ограничений по площади, и которое можно использовать вне чистых помещений.
Кроме того, существует также потребность в устройстве, которое является простым в использовании, позволяя быстро и просто выполнять процесс вакуумного закупоривания медицинского контейнера, в частности, перед клинической процедурой, включающей использование инъекционного устройства, содержащего такой медицинский контейнер.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей изобретения является, таким образом, создание устройства для вакуумного закупоривания медицинского контейнера, которое преодолевает недостатки известных устройств.
Такое усовершенствованное устройство можно стерилизовать, легко и быстро перемещать без ограничения по площади применения.
Устройство дает возможность быстро и просто выполнять вакуумное закупоривание медицинского контейнера, в частности, перед клинической процедурой, включающей в себя использование инъекционного устройства, содержащего такой медицинский контейнер.
Одним из объектов изобретения является устройство для вакуумного закупоривания медицинского контейнера, содержащее:
- основной корпус, определяющий внутренний объем, который содержит камеру переменного давления, выполненную с возможностью подсоединения к вакуумному насосу;
- систему держателя пробки, сообщающуюся с камерой переменного давления и выполненную с возможностью приема и удержания пробки в фиксированном положении по отношению к основному корпусу и соосно с направлением движения поршневого штока;
- поршневой шток, выполненный с возможностью перемещения во внутреннем объеме основного корпуса вдоль продольной оси между проксимальным исходным положением, в котором поршневой шток удален от пробки, и дистальным рабочим положением, в котором поршневой шток контактирует с пробкой и толкает ее в медицинский контейнер;
- систему держателя контейнера, предусмотренную в основном корпусе, расположенную дистально относительно системы держателя пробки и сообщающуюся с камерой переменного давления, причем упомянутая система держателя контейнера выполнена с возможностью приема проксимального конца медицинского контейнера, подлежащего закупориванию, и удержания медицинского контейнера в положении выравнивания с направлением движения поршневого штока так, что при перемещении поршневой шток выталкивает пробку из системы держателя пробки в медицинский контейнер для закупоривания медицинского контейнера.
В данной заявке “дистальное направление“ следует понимать в значении направления введения пробки в медицинский контейнер, а ”проксимальное направление" следует понимать в значении направления, противоположного упомянутому направлению введения пробки в медицинский контейнер.
В соответствии с другими опциональными признаками устройства согласно изобретению:
- основной корпус содержит первую часть, включающую в себя вставку, выполненную с возможностью направления поршневого штока вдоль продольной оси, и вторую часть, дистально примыкающую к первой части, включающую в себя камеру переменного давления, систему держателя пробки и систему держателя контейнера;
- первая часть и вторая части выполнены с возможностью избирательного соединения друг с другом или отделения друг от друга;
- первая часть и вторая часть предпочтительно соединены резьбовым соединением или защелкивающимся соединением; первая часть и вторая часть альтернативно могут быть соединены другими подходящими соединениями, при условии, что может быть достигнута достаточная герметичность, например, с последующим размещением уплотнения в соединении;
- основной корпус содержит, по меньшей мере, две вторые части, каждая из которых содержит систему держателя контейнера, выполненную с возможностью приема конца медицинского контейнера различного размера;
- система держателя контейнера содержит:
проксимальную стенку, снабженную отверстием, сообщающимся с камерой переменного давления, причем отверстие выровнено с продольной осью поршневого штока и выполнено так, что при надавливании на поршневой шток упомянутый поршневой шток проходит через отверстие,
дистальную стенку, обращенную к проксимальной стенке и соединенную с проксимальной стенкой боковой стенкой, снабженной прорезью, причем дистальная стенка снабжена сквозным пазом, сопряженным с прорезью и простирающимся в дистальной стенке от прорези,
проксимальная стенка, дистальная стенка и боковая стенка образуют между собой гнездо, способное принимать конец медицинского контейнера, вставленный в прорезь и перемещаемый вдоль паза для выравнивания с направлением движения поршневого штока;
- проксимальная стенка системы держателя контейнера содержит углубление, снабженное отверстием, причем углубление выполнено с возможностью контакта с концом медицинского контейнера и радиальной блокировки медицинского контейнера, когда медицинский контейнер расположен в гнезде, и когда в камере переменного давления создан вакуум;
- система держателя контейнера сконфигурирована так, что при приеме контейнера системой держателя контейнера проксимальный конец контейнера обращен к поверхности системы держателя контейнера и контактирует с ней в осевом направлении; таким образом, поверхность системы держателя контейнера закрывает проксимальный конец контейнера, обеспечивая тем самым эффективное уплотнение устройства за счет предотвращения утечки воздуха между устройством и окружающей средой;
- система держателя пробки выполнена с возможностью удержания пробки в осевом, а также в радиальном направлении;
- держатель пробки выполнен с возможностью радиального сжатия пробки;
- держатель пробки выполнен с возможностью радиального сжатия пробки, с обеспечением при этом возможности прохождения воздуха через держатель пробки;
- система держателя пробки содержит множество блокирующих элементов, имеющих изогнутую поверхность, причем изогнутая поверхность выполнена с возможностью радиального сжатия пробки;
- система держателя пробки содержит множество блокирующих элементов, расположенных в виде венца, причем система держателя пробки устроена так, что поршневой шток при перемещении проходит через центр венца для отодвигания пробки от блокирующих элементов;
- блокирующие элементы предпочтительно имеют грибовидную форму, причем каждый блокирующий элемент содержит ножку, увенчанную увеличенной головкой, и каждый блокирующий элемент соединен с соседним элементом кольцевой стенкой, образующей стенку венца, так что при расположении в системе держателя пробки пробка контактирует с ножками блокирующих элементов и блокируется в проксимальном направлении по отношению к направлению движения поршневого штока из исходного положения в рабочее положение головками блокирующих элементов, а пробка вместе с блокирующими элементами и стенкой венца образует множество проходов для циркуляции воздуха;
- система держателя пробки предпочтительно содержит два набора блокирующих элементов, причем соответствующие блокирующие элементы двух наборов выполнены в виде двух концентрических венцов, причем каждый блокирующий элемент соединен с соседним элементом кольцевой стенкой, образующей стенку каждого венца, и:
блокирующие элементы первого набора образуют угловые части, радиально простирающиеся от стенки первого венца,
блокирующие элементы второго комплекта образуют опорные части, радиально простирающиеся от стенки второго венца, причем каждый опорный сегмент включает в себя, по меньшей мере, одну перфорацию;
- блокирующие элементы двух наборов выполнены так, что при расположении в системе держателя пробки пробка контактирует с вершиной угловых частей и блокируется в дистальном направлении опорными сегментами, причем перфорации упомянутых опорных частей предназначены для циркуляции воздуха между камерой и контейнером;
- поршневой шток содержит рукоятку для перемещения пользователем вручную;
- устройство является портативным, то есть его можно носить в одной руке пользователя во время использования и транспортировать из одного места в другое. Размеры и вес устройства предпочтительно приспособлены для этой цели.
Другим объектом изобретения является система вакуумного закупоривания медицинского контейнера, содержащая вышеописанное устройство. Согласно предпочтительному варианту осуществления, система содержит вакуумный насос и вакуумный клапан для создания вакуума и регулировки давления в камере переменного давления данного устройства до давления Р1, меньшего атмосферного давления Р0, и обратный клапан для нарушения вакуума так, чтобы отрегулировать давление в камере переменного давления обратно до атмосферного давления Р0. Система предпочтительно содержит цифровой дисплей, связанный с датчиком, размещенным внутри камеры переменного давления, чтобы измерять и отображать для оператора давление в камере переменного давления.
Еще одним объектом настоящего изобретения является способ вакуумного закупоривания медицинского контейнера с использованием устройства или системы, описанных выше. Способ содержит последовательные этапы, на которых:
a) помещают пробку в систему держателя пробки;
b) помещают медицинский контейнер, предварительно заполненный препаратом, в систему держателя контейнера;
c) создают вакуума в камере переменного давления для уменьшения давления внутри камеры переменного давления;
d) перемещают поршневой шток в рабочее положение так, чтобы поместить пробку внутрь медицинского контейнера, когда давление снизится до нужного уровня;
e) нарушают вакуум, чтобы увеличить давление внутри камеры переменного давления и заставить пробку перемещаться дальше вниз по медицинскому контейнеру к поверхности препарата.
Предпочтительно при осуществлении данного способа устройство удерживается в руке пользователя, и, по меньшей мере, этапы a), b) и с) выполняются пользователем вручную.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие признаки и преимущества изобретения станут очевидны из подробного описания, приведенного ниже со ссылкой на прилагаемые чертежи, на которых:
фиг.1 представляет собой вид в аксонометрии варианта осуществления устройства согласно изобретению;
фиг.2А, 2В, 2С представляют собой виды в аксонометрии трех разрезов устройства, показанного на фиг.1, в соответствии с тремя различными положениями поршневого штока;
фиг.3 представляет собой вид в аксонометрии варианта осуществления системы держателя пробки настоящего устройства;
фиг.4 представляет собой вид в аксонометрии другого варианта осуществления системы держателя пробки настоящего устройства;
фиг.5 представляет собой схематическое изображение системы, содержащей устройство согласно изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Согласно изобретению предложено устройство 1 для вакуумного закупоривания медицинского контейнера 28, которое является простым при использовании и перемещении. В частности, при обращении с устройством 1 оператор может быстро и просто выполнить вакуумное закупоривание медицинского контейнера 28.
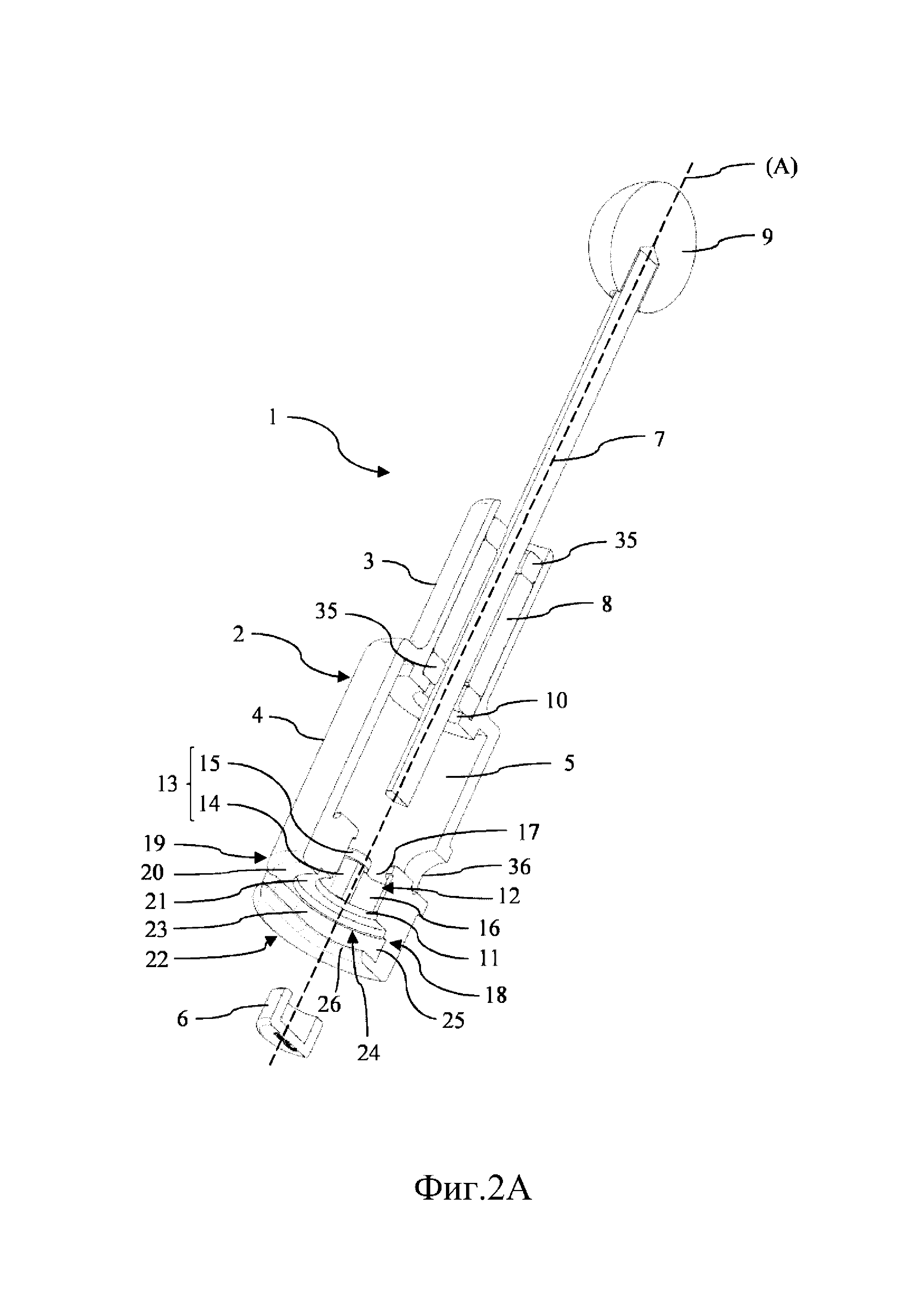
Устройство 1 содержит основной корпус 2, систему 12 держателя пробки, приспособленную для удержания пробки 6 в фиксированном положении до ее установки в контейнер 28, подлежащий закупориванию, поршневой шток 7, перемещаемый внутри основного корпуса 2 вдоль продольной оси (А) для помещения пробки 6 в проксимальный конец контейнера 28, подлежащего закупориванию, и систему 18 держателя контейнера, приспособленную для удержания контейнера 28 в фиксированном положении вдоль продольной оси (А) передвижения поршневого штока.
Согласно варианту осуществления с фиг.1, основной корпус 2 устройства имеет по существу цилиндрическую форму и содержит первую часть 3 и вторую часть 4, дистально примыкающую к первой части. Вместе первая вторая части основного корпуса 2 образуют внутренний объем, ограниченный их боковыми стенками, при этом первая часть 3 предпочтительно имеет меньший диаметр, чем вторая часть 4.
Основной корпус 2 содержит во второй части 4 камеру 5 переменного давления, расположенную внутри внутреннего объема. Камера 5 переменного давления сконфигурирована для подключения к вакуумному насосу 30 (как показано на фиг.4) или аналогичному устройству через выход 36, предусмотренный в соответствующем участке боковой стенки второй части 4 основного корпуса 2. Таким образом, давление внутри камеры 5 переменного давления может быть изменено, в частности, уменьшено ниже атмосферного давления, так что в камере 5 переменного давления создается вакуум.
Как показано на фиг.2А, 2В и 2С, поршневой шток 7 устройства простирается вдоль продольной оси (А) и может перемещаться внутри внутреннего объема основного корпуса 2 вдоль продольной оси (А) от первой части 3 основного корпуса 2 ко второй части 4 основного корпуса и наоборот. В варианте осуществления с фиг.1 продольная ось (А) поршневого штока 7 соответствует оси вращения устройства 1, вокруг которой вращается основной корпус 2. В частности, поршневой шток 7 может перемещаться через камеру 5 переменного давления вдоль продольной оси (А) и пересекает первое отверстие 10 и второе отверстие 11 основного корпуса 2, расположенные соответственно на проксимальном и дистальном концах второй части 4 основного корпуса 2.
Направление движения поршневого штока 7 вдоль оси (А) от первой части 3 ко второй части 4 основного корпуса обозначено как “дистальное направление”, тогда как направление движения поршневого штока 7 вдоль оси (А) от второй части 4 к первой части 3 основного корпуса 2 обозначено как “проксимальное направление".
Если подробнее, поршневой шток 7 может перемещаться, когда его толкает пользователь, между исходным положением, показанным на фиг.2А, в котором дистальный конец поршневого штока расположен в камере 5, вблизи первого отверстия 10 между двумя частями 3, 4 основного корпуса 2, и рабочим положением, показанным на фиг.2С, в котором дистальный конец поршневого штока 7 контактирует с пробкой 6 и толкает упомянутую пробку в контейнер 28, размещенный в системе 18 держателя контейнера до перемещения поршневого штока. Положение поршневого штока 7, показанное на фиг.2B, соответствует промежуточному положению, в котором дистальный конец поршневого штока 7 контактирует с пробкой 6 до ее перемещения в дистальном направлении.
Для облегчения понимания настоящего текста расположение элементов, составляющих устройство 1, будет описано относительно проксимального или дистального направлений движения поршневого штока 7, как описано выше.
Поршневой шток 7 приводится в движение вдоль оси (А) вставкой 8, расположенной в первой части 3 устройства 1.
Вставка 8 сообщается с камерой 5 переменного давления через первое отверстие 10 основного корпуса 2, пересекаемое поршневым штоком 7. Вставка 8 герметизирована как от камеры 5, так и от окружающей среды с помощью радиальных уплотнительных колец 35, расположенных на обоих ее концах.
Устройство может быть опционально снабжено приводом (не представлен) для приведения в движение поршневого штока 7 вдоль оси (А). Привод предпочтительно является пневматическим приводом или электрическим приводом, поскольку оба весьма практичны в использовании, в отличие, например, от гидравлического привода, для работы которого требуется гидравлическая система. Привод приспособлен к тому, чтобы устройство можно стерилизовать и переносить, и в частности, так, что устройство можно использовать в стерильных условиях, таких как под колпаком с ламинарным потоком.
Поршневой шток 7 предпочтительно снабжен рукояткой 9. Таким образом, использование поршневого штока 7 оператором становится проще и удобнее, причем в то же время с более точным позиционированием поршневого штока вдоль основного корпуса 2.
Система 12 держателя пробки выполнена с возможностью приема и удержания пробки 6 в определенном положении и ее выравнивания с продольной осью (А), а также с направлением движения поршневого штока 7 до помещения упомянутой пробки 6 в контейнер 28. Система держателя пробки предпочтительно выполнена с возможностью удержания пробки как в осевом, так и в радиальном направлениях.
Система 12 держателя пробки устройства 1 расположена так, чтобы сообщаться с камерой 5 и, предпочтительно, внутри камеры 5.
В варианте осуществления, показанном на фигурах 1, 2А, 2B и 2C, система 12 держателя пробки расположена, в частности, на дистальном конце второй части 4 основного корпуса 2, в непосредственной близости от второго отверстия 11 основного корпуса. Таким образом, при удержании системой 12 держателя пробки, пробка 6 располагается вблизи контейнера 28, подлежащего закупориванию, что уменьшает длину перемещения поршневого штока 7 до того, как поршневой шток контактирует с пробкой 6 и толкает ее в упомянутый контейнер 28. Таким образом, пробке 6 не приходится перемещаться по всей камере 5, что позволяет обойтись без использования приводного или направляющего средства для удержания выравнивания пробки по оси (А).
Система 12 держателя пробки содержит множество блокирующих элементов 13. Согласно варианту осуществления, показанному на фигурах 1 и 2А-В-С, и 3, блокирующие элементы 13 расположены в венце, проходящем вокруг второго отверстия 11. Система 12 держателя пробки предпочтительно расположена таким образом, что ось (А) проходит через центр венца, что позволяет поршневому штоку 7 проходить через центр венца, толкая при этом пробку 6.
Блокирующие элементы 13 простираются параллельно продольной оси (А) движения поршневого штока 7 и связаны вместе стенкой 16 венца. Они имеют предпочтительно грибовидную форму, то есть состоят из ножки 14, увенчанной увеличенной головкой 15. Когда пробка 6 расположена в системе 12 держателя пробки, боковая стенка пробки контактирует с ножками 14 блокирующих элементов 13, а проксимальный конец пробки 6 упирается в головку 15 блокирующих элементов 13. Поэтому, когда давление в камере 5 переменного давления уменьшается ниже атмосферного давления, из-за чего пробка 6 притягивается в проксимальном направлении за счет перепада давления между давлением в камере 5 и давлением в контейнере 28, пробка 6 упирается в головку 15 блокирующих элементов 13 и не может перемещаться проксимально в камеру 5. Следовательно, пробка 6 остается в своем положении в системе 12 держателя пробки до тех пор, пока ее не подтолкнет поршневой шток 7. Ножки 14, окружающие пробку 6, удерживают пробку в радиальном направлении. Упомянутые ножки 14 могут быть выполнены так, чтобы сжимать пробку радиально для дальнейшего улучшения осевой и радиальной блокировки пробки.
Кроме того, система 12 держателя пробки сконфигурирована так, чтобы образовать по отношению к пробке 6, по меньшей мере, один проход 17 циркуляции воздуха, когда упомянутая пробка 6 расположена в системе 12 держателя пробки. Таким образом, воздух может течь с одной стороны системы 12 держателя пробки к другой стороне.
Когда пробка 6 расположена в системе 12 держателя пробки, границы головок 15 блокирующих элементов 13, стенки 16 венца и пробка 6 образуют воздухообменный проход 17 для течения воздуха из камеры 5 в контейнер 28 и наоборот.
При создании вакуума в камере 5 воздух течет в проксимальном направлении из внутренней части контейнера 28 к вакуумному насосу 30 (показанному на фиг.4) через проходы 17 циркуляции воздуха и камеру 5. Когда вакуум нарушается, воздух течет в дистальном направлении от вакуумного насоса 30 к контейнеру 28 через камеру 5 и проходы 17 циркуляции воздуха.
Другой вариант осуществления системы 12 держателя пробки показан на фиг.4. Система держателя пробки в данном варианте расположена в том же месте, что и система держателя пробки в варианте, показанном на фигурах 1, 2A, 2B, 2C и 3.
Согласно фиг.4, система 12 держателя пробки содержит два набора блокирующих элементов, включая первый набор 37 и второй набор 38 блокирующих элементов, расположенных, соответственно, в двух концентрических венцах, которые окружают второе отверстие 11. Система 12 держателя пробки предпочтительно устроена так, что продольная ось (А) проходит через центр венцов, что позволяет поршневому штоку 7 при проталкивании пробки 6 проходить через центр венцов.
В первом наборе блокирующих элементов 37 блокирующие элементы образуют угловые части, предпочтительно, треугольные части, которые простираются радиально (т.е. в направлении, перпендикулярном оси (А)) от стенки 39 первого венца, соединяющей каждую угловую часть с соседней частью.
Во втором наборе блокирующих элементов 38 блокирующие элементы образуют опорные части, которые радиально простираются от стенки 40 второго венца, соединяющего каждый опорный сегмент с соседним, и равномерно разнесены друг от друга вдоль стенки 40. Каждый опорный сегмент 38 содержит, по меньшей мере, одну перфорацию 41, которая простирается в осевом направлении (т. е. в направлении, параллельном оси (А)) через опорную часть. Перфорации 41 опорных частей 38, которые могут быть частично закрыты пробкой 6, когда последняя располагается в системе 12 держателя пробки, служат проходом циркуляции воздуха для протекания воздуха из камеры 5 в контейнер 28 и наоборот. Угловые части 37 предпочтительно смещены от опорных частей 38 для обеспечения лучшего протекания воздуха. Функция такого прохода циркуляции воздуха уже обсуждалась выше для предыдущего варианта осуществления системы 12 держателя пробки. Когда пробка 6 расположена в системе 12 держателя пробки, боковая стенка пробки 6 контактирует с вершинами угловых частей 37, а проксимальный конец пробки 6 упирается в опорные части 38.Поэтому, когда давление в камере 5 переменного давления уменьшается ниже атмосферного давления, заставляя, тем самым, пробку 6 притягиваться в проксимальном направлении за счет перепада давления ΔP (разность между давлением P0, в общем случае атмосферным давлением среды, окружающей медицинский контейнер 27, и давлением Р1 внутри устройства после механического позиционирования пробки под воздействием вакуума), пробка 6 упирается в опорные части 38, и предотвращается ее проксимальное перемещение в камеру 5. Таким образом, пробка 6 остается в своем положении в системе 12 держателя пробки до тех пор, пока ее не протолкнет поршневой шток 7. Угловые части 37, окружающие пробку 6, поддерживают пробку радиально. Упомянутые угловые части 37 могут быть выполнены с возможностью радиального сжатия пробки для дальнейшего улучшения осевой и радиальной блокировки пробки.
Внутренние участки 42 опорных частей 38 предпочтительно изогнуты так, что изгиб опорных частей 38 формирует внутренний круг, который по существу соответствует форме поршневого штока 7. Разумеется, что размеры опорных частей 38 и угловых частей 37 приспособлены для обеспечения осевой блокировки пробки 6 и обеспечения возможности смещения поршневого штока 7 через систему 12 держателя пробки для того, чтобы толкать пробку 6.
Вариант осуществления с фиг.4 особенно предпочтителен для небольших пробок, например пробок для контейнеров объемом менее 5 мл.
Разумеется, инъекционное устройство может содержать и другие варианты осуществления системы держателя пробки, не выходя при этом из объема настоящего изобретения. Например, система держателя пробки может содержать множество блокирующих элементов, имеющих изогнутую поверхность, которая выполнена с возможностью радиального сжатия пробки.
Как отмечалось ранее, система 12 держателя пробки позволяет удерживать пробку 6 до ее введения в контейнер в положении, в котором пробка по существу выровнена с осью (А) движения поршневого штока 7. Когда поршневой шток толкают в дистальном направлении, поршневой шток 7 сталкивается с пробкой 6 и толкает упомянутую пробку в дистальном направлении внутрь контейнера 28, через проксимальный конец контейнера.
Система 18 держателя контейнера устройства выполнена с возможностью приема проксимального конца контейнера 28, подлежащего закупориванию. Система 18 держателя контейнера расположена дистально относительно системы 12 держателя пробки и сконфигурирована так, чтобы удерживать контейнер 28 в положении, по существу выровненном c осью (А) передвижения поршневого штока 7, так что при движении в дистальном направлении поршневой шток 7 толкает пробку 6, ранее расположенную в системе 12 держателя пробки, в контейнер 28.
В целом система 18 держателя контейнера сконфигурирована так, что при приеме контейнера 28 в систему держателя контейнера проксимальный конец контейнера обращен в осевом направлении к поверхности системы держателя контейнера и контактирует с ней. Таким образом, поверхность системы держателя контейнера закрывает проксимальный конец контейнера, обеспечивая тем самым эффективное уплотнение устройства, поскольку предотвращаются любые утечки воздуха между устройством и окружающим пространством.
Согласно варианту осуществления с фигур 1 и 2А-В-С, система 18 держателя контейнера расположена на дистальном конце второй части 4 основного корпуса 2, в непосредственной близости от системы 12 держателя пробки, минимизируя тем самым расстояние между пробкой 6, расположенной в системе 12 держателя пробки, и контейнером 28. Это позволяет уменьшить длину перемещения поршневого штока 7, причем поршневой шток касается пробки 6 и толкает ее дистальном направлении в упомянутый контейнер 28, по причинам, объясненным выше.
Система 18 держателя контейнера содержит проксимальную стенку 19, дистальную стенку 22, обращенную к проксимальной стенке, и боковую стенку 23, соединяющую проксимальную и дистальную стенки. Проксимальная стенка 19, дистальная стенка 22 и боковая стенка 23 образуют гнездо 24, сконфигурированное для приема проксимального конца контейнера 28, подлежащего закупориванию.
Система 18 держателя контейнера позволяет удерживать вставленный в него контейнер 28 в фиксированном положении, а также закреплять контейнер, предотвращая его выпадение из устройства 1, когда пробка 6 устанавливается в контейнер.
Согласно варианту осуществления с фигур 1 и 2А-В-С, проксимальная стенка 19 содержит кромку 20, которая окружает углубление 21, причем упомянутое углубление соответствует дистальному концу второй части 4 основного корпуса. Прокладка или присоска (не изображено на фигурах) расположена в углублении 21 так, чтобы простираться между вторым отверстием 11 и кромкой 20. Прокладка предотвращает любую утечку воздуха между устройством и окружающей средой и может быть изготовлена из любого подходящего материала, например, резины. Прокладка предпочтительно представляет собой круглое в сечении кольцо или может быть плоской.
При расположении в системе 18 держателя контейнера, проксимальный конец контейнера 28 вставлен в углубление 21 и контактирует с прокладкой, предотвращая тем самым любую утечку при создании вакуума, и закрывает второе отверстие 11 основного корпуса 2. Контейнер 28 также выровнен со вторым отверстием 11 и, в результате, с продольной осью (А) движения поршневого штока 7.
Кроме того, с практической точки зрения, когда при создании вакуума в камере 5 достигается давление Р1, ниже атмосферного давления Р0, контейнер 28, который толкается в проксимальном направлении усилиям, создаваемыми вакуумом, прижимается, в результате, к проксимальной стенке 19.
Боковая стенка 23 снабжена прорезью 25, а дистальная стенка 22 снабжена сквозным пазом 26, сопряженным с прорезью 25, причем упомянутый паз простирается от прорези через дистальную стенку 22. Практически, проксимальный конец контейнера 28 вставляется через прорезь 25 боковой стенки и перемещается в радиальном направлении вдоль паза 26 дистальной стенки до тех пор, пока контейнер 28 не выровняется со вторым отверстием 11 основного корпуса 2. Затем проксимальный конец контейнера 28 перемещается вверх, к прокладке, расположенной в углублении 21.
Паз 26 сконфигурирован так, что он позволяет вставлять контейнер 28, избегая при этом падения указанного контейнера с устройства. Для этого ширина паза 26 предпочтительно меньше ширины проксимального конца контейнера 28.
Паз 26 выполнен таким образом, что внутренняя поверхность паза контактирует с корпусом контейнера 28. В частности, паз 26 может быть сконфигурирован так, чтобы предотвратить радиальное перемещение вставленного в него контейнера 28, если только контейнер не перемещается оператором. Паз предпочтительно выполнен из жесткого материала и гладкого материала, такого как жесткий пластик или, например, металла (алюминий, нержавеющая сталь), для облегчения вставки в него контейнера, а также, чтобы способствовать удержанию контейнера в фиксированном положении в гнезде 24 во время закупоривания контейнера.
С этой целью паз 26 может содержать регулировочные средства для регулировки ширины паза.
Для этой же цели конструкция как прорези 25, так и паза 26 может быть адаптирована в соответствии с типом контейнера 28, предназначенного к закупориванию устройством 1.
Когда контейнер 28 представляет собой, например, шприц или подобное устройство, поскольку ширина проксимального конца контейнера 28 больше ширины его корпуса, ширина прорези 25 больше ширины паза 26. Данная конфигурация представлена на фигурах 1 и 2А-В-С. Вход паза 26 ограничен двумя выступающими частями 27, сформированными в дистальной стенке, которая обращена к проксимальной стенке. В такой конфигурации проксимальный конец контейнера 28 при вставлении в паз 26 может упираться в выступающие части 27, предотвращая тем самым выпадение контейнера из паза.
Альтернативно, когда контейнер 28 представляет собой цилиндр или подобное устройство, поскольку ширина цилиндра одинакова по всей его длине, ширина прорези 25 может быть такой же, как ширина паза 26. В данной конфигурации проксимальный конец контейнера 28 не может упираться в дистальную стенку 22, но контейнер 28 все же может удерживаться в пазу 26, если этот паз сконфигурирован так, что он предотвращает радиальное перемещение введенного в него контейнера 28, как описано ранее.
Уплотнение также может быть адаптировано в соответствии с типом контейнера 28. Например, когда контейнер представляет собой шприц или подобное устройство, уплотнение может быть плоским уплотнением, тогда как, если контейнер представляет собой цилиндр, уплотнение может быть уплотнением круглого сечения.
В отличие от вакуумных закупоривающих инструментов предшествующего уровня техники, которые не содержат какой-либо системы держателя контейнера (контейнер просто размещают с выравниванием с поршневым штоком), система держателя контейнера устройства согласно изобретению прикреплена к корпусу; таким образом, контейнер зафиксирован на основном корпусе во время использования. Это способствует, наряду с общей конструкцией устройства, имеющей уменьшенные размеры и массу, изготовлению устройства ручным и удобным в переноске для использования, особенно для осуществления быстрой и простой реализации вакуумного закупоривания медицинского контейнера. Кроме того, устройство - либо в целом, либо только вторая часть 4, то есть та часть устройства, которая, вероятно, будет контактировать с препаратом, содержащимся в контейнере, - может быть легко стерилизовано в автоклаве.
Устройство ручное, что означает возможность его ношения в одной руке при использовании и транспортировке из одного места в другое. Размеры и масса устройства успешно приспособлены для этой цели. Например, основной корпус 2 предпочтительно имеет длину от 20 до 30 сантиметров, массу менее 1 килограмма, более предпочтительно, от 50 до 300 граммов и диаметр от 5 до 10 сантиметров.
При использовании устройства пользователь может удерживать основной корпус по существу в вертикальном положении одной рукой, а другой рукой устанавливать медицинский контейнер в системе держателя контейнера. Затем, для создания вакуума в устройстве, пользователь может продолжать удерживать основной корпус одной рукой и регулировать при этом вакуум с помощью вакуумного насоса 30 и вакуумного клапана 31, соответственно, другой рукой, прежде чем толкать поршневой шток 7 этой другой рукой. При необходимости устройство, разумеется, может быть закреплено на подходящем устройстве, позволяющем облегчить процесс, таком как кронштейн, например.
В предпочтительном варианте осуществления устройства первая часть 3, включающая в себя вставку 8, и вторая часть 4, включающая в себя камеру 5 переменного давления, систему 12 держателя пробки и систему 18 держателя контейнера, могут быть выполнены с возможностью отделения друг от друга. Другими словами, первая и вторая части 3, 4 можно избирательно соединять друг с другом при использовании устройства 1 или, наоборот, отделять друг от друга. Поршневой шток 7 предпочтительно также может быть отделен от первой части 3 устройства.
Таким образом, для определенного применения вакуумного закупоривания медицинского контейнера 28 можно стерилизовать только вторую часть 4 устройства и повторно использовать ранее стерилизованную первую часть 3 без необходимости стерилизовать ее снова. То же самое относится и к поршневому штоку 7, когда этот поршневой шток был стерилизован с первой частью перед применением.
Резьбовое соединение или, например, соединение с защелкиванием особенно хорошо подходят для соединения и разделения первой и второй частей 3, 4 устройства. В альтернативном варианте первая часть и вторая части могут быть соединены посредством других подходящих соединений, при условии, что может быть достигнута достаточная герметичность, например, с дополнительным размещением уплотнения на соединении.
Кроме того, устройство 1 может содержать, по меньшей мере, две вторые части 4, причем каждая вторая часть содержит систему 18 держателя контейнера, сконфигурированную для приема конца медицинского контейнера 28 различного размера.
Таким образом, можно приспособить устройство 1 к контейнеру 28 любого заданного размера с множеством съемных вторых частей 4, системы 12 держателя контейнера которых соответствуют размерам контейнеров 28.
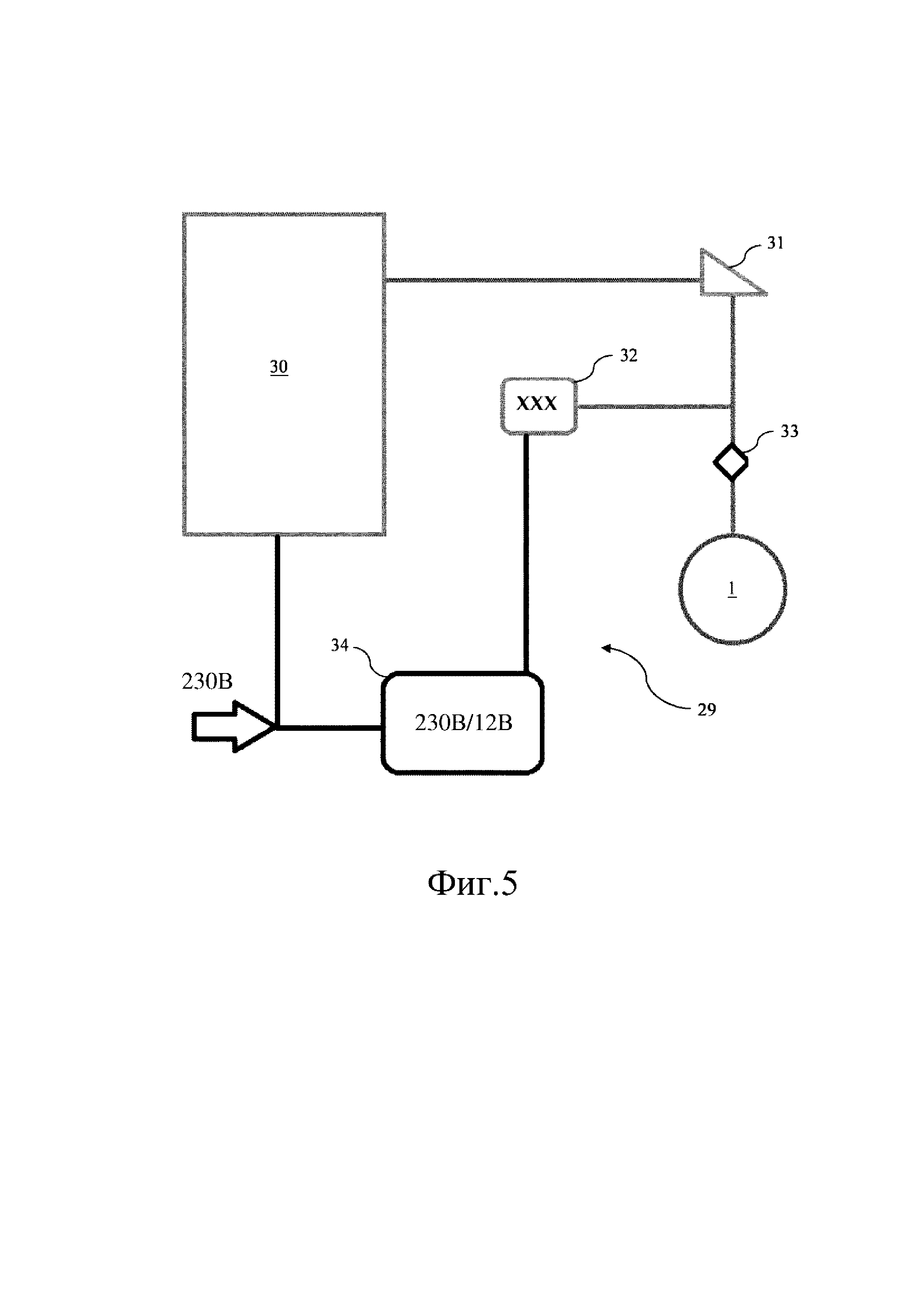
Другим объектом изобретения является система 29 для вакуумного закупоривания медицинского контейнера 28, содержащая устройство 1 как описано ранее и способ вакуумного закупоривания контейнера 28 с использованием такого устройства 1 или системы 29. Этот процесс будет дополнительно пояснен на системе, показанной на фиг.5.
Система 29 содержит устройство 1, вакуумный насос 30, микрометрический или любой другой вакуумный клапан 31, обратный клапан 33, датчик давления (не представлен), соединенный с цифровым дисплеем 32, и источник питания 34.
Вначале пробка 6 расположена в системе 12 держателя пробки устройства 1, находящейся под атмосферным давлением Р0. Контейнер 28, предварительно заполненный препаратом, помещается затем в систему 18 держателя контейнера упомянутого устройства 1. В это время поршневой шток 7 находится в исходном положении. Камеру 5 переменного давления, если это еще не сделано, соединяют с вакуумным насосом 30 через выпуск 36. Затем в камере 5 создают вакуум до тех пор, пока давление не достигнет заданного давления Р1, ниже атмосферного давления Р0. Давление регулируется с помощью микрометрического вакуумного клапана 31, которым можно управлять вручную, и давление в камере 5 можно контролировать с помощью цифрового дисплея 32, который получает данные измерения давления от датчика, расположенного внутри камеры 5 или в вакуумной линии. Контейнер 28 притягивают в проксимальном направлении к устройству 1 непосредственно силой вакуума или на первом этапе оператором, в то время как пробка 6 остается в своем положении в системе 12 держателя пробки.
После того, как давление, читаемое на дисплее 32, достигает заданного давления P1, поршневой шток 7 толкают в дистальном направлении вдоль оси (А) к рабочему положению, при этом упомянутый поршневой шток толкает пробку 6 в дистальном направлении от системы 12 держателя пробки к внутренней части контейнера 28. Затем поршневой шток 7 перемещается в проксимальном направлении назад в исходное положение.
Отметим, что положение пробки 6 внутри контейнера 28 не обязательно должно быть точным, если только пробка 6 не расположена слишком близко к проксимальному концу контейнера 28.
Затем, при нарушении вакуума посредством обратного клапана 33, давление внутри камеры 5 повышается и заставляет пробку 6 перемещаться дальше вниз по контейнеру 28 к поверхности препарата: контейнер тогда закупоривается.
Если подробнее, пробка 6 перемещается вниз сама, без помощи поршневого штока 7. Действительно, давление в части контейнера между пробкой 6 и поверхностью препарата равно Р1, в то время как давление с другой стороны пробки увеличивается. Перепад давления заставляет пробку 6 перемещаться в дистальном направлении до тех пор, пока не будет достигнуто равновесие давлений, что соответствует положению пробки 6, в котором последняя находится прямо над поверхностью препарата.
Благодаря устройству 1, этапы способа могут выполняться оператором вручную в следующем порядке. В частности, оператор может:
1) вручную установить пробку 6 в системе 12 держателя пробки устройства 1,
2) поместить контейнер 28 в систему 18 держателя контейнера устройства 1, и
3) толкать поршневой шток 7 в дистальном направлении, чтобы поместить пробку 6 внутрь медицинского контейнера 28.
Это позволяет быстро и просто выполнять вакуумное закупоривание медицинского контейнера в любых условиях окружающей среды, таких как чистые помещения, стерильная среда или неконтролируемая среда, и легко переключаться с одной на другую.
Реферат
Группа изобретений относится к медицинской технике. Устройство для вакуумного закупоривания медицинского контейнера содержит основной корпус, определяющий внутренний объем, который содержит камеру переменного давления, выполненную с возможностью подсоединения к вакуумному насосу; систему держателя пробки, сообщающуюся с камерой переменного давления и выполненную с возможностью приема и удержания пробки в положении выравнивания с направлением движения поршневого штока, и поршневой шток, перемещаемый внутри внутреннего объема основного корпуса вдоль продольной оси между проксимальным исходным положением и дистальным рабочим положением, в котором поршневой шток толкает пробку в медицинский контейнер. Система держателя контейнера, предусмотренная в основном корпусе, расположена дистально по отношению к системе держателя пробки и сообщается с камерой переменного давления. Система держателя контейнера предназначена для приема проксимального конца медицинского контейнера, подлежащего закупориванию, и удержания медицинского контейнера выровненным с направлением движения поршневого штока, так что при перемещении поршневой шток толкает пробку из системы держателя пробки в медицинский контейнер, чтобы закупорить медицинский контейнер. Раскрыты система для вакуумного закупоривания медицинского контейнера и способ вакуумного закупоривания. Технический результат состоит в быстром и простом выполнении вакуумного закупоривания медицинского контейнера. 3 н. и 13 з.п. ф-лы, 7 ил.
Комментарии