Плавучая опора или судно, оснащенное устройством обнаружения движения свободной поверхности тела жидкости - RU2520622C2
Код документа: RU2520622C2
Чертежи





















Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к судам или плавучим опорам или платформам для бестарной перевозки или хранения жидкости, оборудованных средствами обнаружения движения свободной поверхности жидкости внутри резервуаров, резервуаров судна для перевозки или хранения жидкости.
Более конкретно, изобретение касается судов для криогенной перевозки сжиженного природного газа (СПГ) или сжиженного метана, или же других газов, находящихся в сжиженном состоянии при крайне низкой температуре, например пропана, бутана, этилена или любого другого газа, плотность которого в сжиженном состоянии ниже плотности воды, перевозимого крупными партиями в жидком состоянии при по существу атмосферном давлении.
Уровень техники
При перевозке сжиженных газов при давлении, близком к атмосферному, их необходимо охлаждать до низких температур для сохранения их жидкого состояния. Они помещаются в резервуары большого размера, имеющие сферическую или цилиндрическую форму с поперечным сечением предпочтительно в виде многоугольника, имеющие, в частности, форму параллелепипеда, причем в указанных резервуарах предусмотрена чрезвычайно высокая термоизоляция, ограничивающая испарение газа и обеспечивающая поддержание приемлемой температуры стальных конструкций судна. Суда, как правило, совершают переход либо с полной загрузкой (95-98%), либо с незначительными остатками газа (3-5%) на дне резервуара, чтобы обеспечить постоянное поддержание резервуаров и системы термоизоляции в холодном состоянии для ускорения их загрузки путем устранения необходимости их постепенного и, следовательно, медленного и связанного со значительными затратами рабочего времени охлаждения.
Управление такими судами чрезвычайно сложно в связи с опасностями, связанными с хранением газа и соответствующей возможностью взрыва. Поэтому все техническое оборудование, имеющееся на борту, должно соответствовать крайне жестким стандартам безопасности, так как малейшая искра может вызвать воспламенение, причем такая искра может возникнуть от столкновения металлических предметов, в результате использования простого электрического выключателя или же вследствие передачи радиосигнала, уровень энергии которого превосходит установленное пороговое значение. Такие ограничения определены чрезвычайно жесткими правилами, в соответствии с которыми все элементы оборудования должны соответствовать условиям, определенным стандартами АТЕХ (от фр. «Atmosphere Explosive» - взрывоопасная атмосфера), известными специалистам в данной области.
Во время транспортировки содержимое резервуаров ведет себя как жидкость со свободной поверхностью, в результате чего внутри резервуара могут возникнуть явления сильного волнения, или «плескания» жидкости (также обозначаемые английским термином «sloshing»), в частности, при ударах волн о вертикальные стенки резервуара и о стенки трехгранного угла, образуемого на стыке двух вертикальных стенок и потолка указанного резервуара. Такие явления особенно значительны вследствие того, что транспортируемые жидкости имеют крайне низкую вязкость, меньшую вязкости воды.
Опасность возникновения таких явлений существует как на танкерах для перевозки сжиженного метана, так и на стоящих на якоре платформах для хранения сжиженного газа, обозначаемых аббревиатурой FPSO (от англ. Floating Production Storage & Offloading), т.е. на плавучих платформах для добычи, хранения и отгрузки продукта, при наличии волнения на море и даже при практически спокойном море, когда груз сжиженного газа входит в резонанс с возмущением, создаваемым даже слабым волнением, воздействующим на судно. В случае возникновения такого резонанса «плескание» может стать чрезвычайно сильным и привести к выплескиванию жидкости на вертикальные стенки или в углы резервуара, что может привести к повреждению системы хранения сжиженного газа или системы термоизоляции, расположенной непосредственно за указанной системой хранения.
Такие явления «плескания» могут возникать в условиях относительно спокойного моря, но как правило, возникают лишь при определенных уровнях заполнения резервуаров, причем любое состояние моря (определяемое эффективной высотой волнения, периодичностью волн, углом падения волн, балластировкой судна и т.д.) может стать опасным при определенной высоте заполнения резервуара.
Раскрытие изобретения
Задача, на решение которой направлено настоящее изобретение, заключается в предотвращении явлений волнения жидкости типа «плескания» в резервуарах судов для транспортировки или хранения сжиженного газа, в частности, сжиженного метана или СПГ, путем обнаружения явлений, предшествующих возникновению указанного «плескания». В нижеследующем описании термин «СПГ» использован для обозначения метана в сжиженном состоянии, т.е. сжиженного природного газа, а термины «метан» или «газообразный метан» обозначают его газообразное состояние.
Обнаружение таких явлений, предшествующих возникновению указанного «плескания», позволяет капитану судна внести необходимые изменения в движение судна, например, изменив его курс или скорость, чтобы ослабить резонансные явления, которые могут привести к возникновению «плескания», опасного для целостности судна. Аналогичным образом, если судно оборудовано средствами статического или динамического гашения «плескания», например, внешними стабилизаторами (добавочными рулями) или активным балластом, или же средствами гашения, предусмотренными непосредственно в резервуарах указанного судна, то обнаружение таких явлений, предшествующих возникновению указанного «плескания», обеспечивает возможность тонкой регулировки и настройки параметров указанных систем с целью ослабления или полного прекращения опасных явлений.
Авторы изобретения испытали различные средства обнаружения движения свободной поверхности жидкости внутри резервуаров судов или плавучих платформ, но чувствительность таких средств не позволяет получать полезную информацию, в частности, чувствительность детектирующих устройств, основанных на измерении свободной поверхности внутренней стенки резервуара, содержащего указанную свободную поверхность жидкости, при помощи сонаров или ультразвуковых устройств.
Проблема обнаружения движения вызвана трудностями определения положения свободной поверхности СПГ в связи с условиями чрезвычайно низкой температуры; кроме этого для корректного анализа свободной поверхности в зонах, важных с точки зрения возможной опасности возникновения «плескания», способного привести к разрушительным последствиям, требуется установка слишком большого количества датчиков.
В рамках настоящего изобретения авторы используют устройства для обнаружения движения свободной поверхности жидкости, приспособленные для указанных обстоятельств, и основанные в частности на принципе работы датчиков вибрации стенки, находящейся в прямом или непрямом контакте с указанной жидкостью, т.е. стенки, которой передается вибрация стенок резервуара, предпочтительно с помощью вибрационных акселерометров, регистрирующих изменения ускорения g как функцию от времени.
Точнее, в соответствии с настоящим изобретением предлагается судно или плавучая платформа для транспортировки или хранения жидкости, представляющей собой сжиженный газ, предпочтительно метан, этилен, пропан или бутан, охлажденный в, по меньшей мере, одном большом резервуаре, предпочтительно цилиндрической формы с многоугольным поперечным сечением, оборудованном термоизоляцией и имеющем большие размеры, причем, по меньшей мере, его наименьший размер в горизонтальном направлении, в частности его ширина, превосходит 20 м, и предпочтительно составляет от 25 м до 50 м, а объем превышает 10000 м3; причем указанный большой резервуар 2 удерживается внутри корпуса судна несущей конструкцией, отличающееся тем, что содержит множество устройств для обнаружения возмущения жидкости внутри указанного большого резервуара (резервуаров), далее называемых «маячками», которые содержат:
a) вибрационный датчик, представляющий собой вибрационный акселерометр, выполненный с возможностью измерения амплитуды ускорения (д) как функции от времени (t) вибрационных перемещений стенки указанного большого резервуара или стенки судна, не находящейся в соприкосновении с морской водой, причем указанная стенка судна может представлять собой палубу судна или стенку внутренней конструкции судна, предпочтительно стенку части внутренней конструкции, несущей указанный большой резервуар; причем указанные датчики прикреплены к такой стенке снаружи указанного большого резервуара,
b) электронный вычислительный модуль, содержащий микропроцессор и встроенную память, выполненный с возможностью обработки сигнала, измеренного указанным вибрационным датчиком, с целью, по меньшей мере, устранения собственных фоновых шумов судна и обнаружения движения жидкости внутри указанного большого резервуара путем сравнения значений обработанного таким образом сигнала с заранее определенными пороговыми значениями, по превышении которых возмущение свободной поверхности жидкости считается представляющим опасность повреждения и разрушительной деформации указанной стенки, и
c) средства передачи указанного сигнала после его обработки указанным электронным вычислительным модулем в центральный модуль или контроллер, предпочтительно установленный на судовом мостике.
Под «стенкой внутренней конструкции судна» следует понимать, в частности, внутреннюю стенку корпуса судна с двойным корпусом или стенку системы поддержки и/или изоляции указанного большого резервуара внутри корпуса.
Собрав различные данные сигналов от разных маячков в указанном центральном модуле, специалист в данной области может ввести эти данные в математическую модель, предоставляющую инструкции по управлению судном и/или по уровню наполнения резервуара (резервуаров), причем указанные инструкции предназначены для уменьшения или устранения опасности возникновения «плескания», т.е. повреждения или разрушительной деформации указанной стенки. В частности, речь идет об инструкциях, касающихся курса или скорости движения судна в случае транспортного судна или об инструкциях, касающихся уровней наполнения его резервуара (резервуаров) в случае, если судно используется как судно-хранилище, описанное ниже.
Говоря точнее, каждый из маячков содержит:
указанный электронный вычислительный модуль, выполненный с возможностью осуществления следующих этапов обработки сигнала:
1.1) использования в режиме реального времени преобразования Фурье, предпочтительно быстрого преобразования Фурье, сигналов изменения амплитуды ускорения (д) указанной стенки как функции от времени (t), измеренных указанным в пункте а) вибрационным акселерометром, с целью вычисления изменения амплитуды ускорения (д) как функции от частоты F вибрационных колебаний сигнала, полученного в пункте а), в течение заданного периода At времени, предпочтительно с последующим вычислением спектральной плотности энергии и/или спектральной плотности мощности,
1.2) устранения путем фильтрации сигнала фоновых шумов, вызванных собственной вибрацией судна,
1.3) вычисления максимальных временных значений ускорения, получаемых при помощи обратного преобразования Фурье, предпочтительно обратного быстрого преобразования Фурье, изменений амплитуды ускорения (g) как функции от частоты (F), полученных на этапе 1.1), после фильтрации на этапе 1.2), и вычисления максимальных значений спектральной плотности энергии (е1, е2) и/или максимальных значений спектральной плотности мощности (Р0), и, предпочтительно, вычисления значений спектральной энергии и значений спектральной мощности, соответственно, по измерениям спектральной плотности энергии и/или спектральной плотности мощности, полученным на этапе 1.1), после фильтрации на этапе 1.2), и
1.4) сравнения указанных максимальных временных значений ускорения и, предпочтительно, указанных максимальных значений спектральной плотности энергии и/или максимальных значений спектральной плотности -мощности и, также предпочтительно, указанных значений спектральной энергии и спектральной мощности, соответственно, полученных на этапе 1.3), с соответствующими заранее определенными пороговыми значениями S1, emax, pmах, по превышении которых возмущение свободной поверхности жидкости считается представляющим опасность повреждения и разрушительной деформации указанной стенки, и
- указанные средства передачи, выполненные с возможностью их активации указанным электронным вычислительным модулем и с возможностью передачи указанных максимальных временных значений ускорения и, предпочтительно, указанных максимальных значений спектральной плотности энергии и/или максимальных значений спектральной плотности мощности и, более предпочтительно, указанных значений спектральной энергии и спектральной мощности, соответственно, полученных на этапе 1.3), в центральный модуль, предпочтительно установленный на судовом мостике и обеспечивающий сбор данных, передаваемых всеми указанными маячками; причем указанные данные передаются в центральный модуль, предпочтительно установленный на судовом мостике и собирающий данные, передаваемые всеми указанными маячками, если, по меньшей мере, один из маячков зарегистрирует превышение одного из указанных на этапе 1.4) пороговых значений.
Способы производимых на этапах 1.1) и 1.3) вычислений для преобразования временного сигнала при помощи преобразования Фурье и вычисления спектральной мощности и спектральной плотности известны специалистам в области обработки сигналов. Способы вычислений спектральной энергии и спектральной мощности, которым соответствуют интегралы кривых спектральной плотности энергии и спектральной плотности мощности, соответственно, также известны специалистам в области обработки сигналов.
На этапе 1.4) вероятность деформации или повреждения указанной стенки, связанная с указанным пороговым значением, соответствует вероятности возникновения резонанса движения свободной поверхности жидкости.
При использовании данного способа все вычисления в режиме реального времени производит указанный вычислительный модуль, предусмотренный в составе маячка, который передает в центральный контроллер только результаты вычислений, представляющие собой более компактные и быстро передаваемые данные в сравнении с временным сигналом, передача которого привела бы к постоянной загрузке средств передачи, энергопотребление которых вносит основной вклад в энергопотребление маячка. Таким образом, передачу результатов обработки сигнала производят только в случае превышения пороговых значений.
На этапе 2) указанные средства передачи, исходно находящиеся в режиме ожидания, активируются командой, поступающей от указанного вычислительного модуля, если пороговое значение было превышено.
Подразумевается, что указанный вычислительный модуль содержит встроенную память, выполненную с возможностью сохранения данных, получаемых от датчиков с течением времени, в результате чего вычислительный модуль может впоследствии анализировать глобальное поведение свободной поверхности жидкости с течением времени, в частности, когда судно находится на защищенной стоянке или во время перехода в спокойных условиях, т.е. в отсутствие опасности движения свободной поверхности жидкости и, в частности, опасности возникновения «плескания», причем такие наблюдения могут быть увязаны со значениями бортовой и/или килевой качки судна, что позволяет оценить фоновые шумы, создаваемые самим судном в отсутствие значительного движения свободной поверхности жидкости, и, таким образом, определить указанные пороговые значения, упомянутые выше.
Более конкретно, указанный вибрационный акселерометр представляет собой пьезорезистивный акселерометр.
Такие пьезорезистивные регистрационные акселерометры позволяют регистрировать частоты в диапазоне от 0 до 5-10 кГц с точностью измерений порядка 3%-5%. Пьезорезистивные акселерометры такого типа обеспечивают возможность определения состояния полного покоя, т.е. нулевого ускорения.
Также могут быть использованы и акселерометры других типов, например, пьезоэлектрические акселерометры, емкостные акселерометры, индуктивные акселерометры, измерители напряжения типа тензометров и др.
Указанный вибрационный датчик предпочтительно представляет собой трехосевой вибрационный акселерометр. Такие трехосевые акселерометры выполнены с возможностью измерения амплитуды вибрации стенки в трех пространственных направлениях как функции от времени.
Указанные средства передачи предпочтительно содержат антенну и приемопередатчик, выполненный с возможностью преобразования электрических сигналов, поступающих из указанного вычислительного модуля, в радиоволны, которые передаются антенной.
В соответствии с другим вариантом осуществления изобретения указанные средства передачи содержат проводные средства передачи, включающие кабели, соединенные с интерфейсом для преобразования сигнала, выполненным с возможностью преобразования сигнала в нужный для передачи по указанным кабелям вид, предпочтительно оптоволоконные кабели, соединенные с интерфейсами, которые преобразуют указанные данные из электрического сигнала, поступающего из указанного электронного вычислительного модуля, в световые сигналы.
В первом варианте осуществления изобретения указанный маячок дополнительно содержит вспомогательное устройство, выполненное с возможностью обнаружения собственных движений судна и активации указанного электронного вычислительного модуля указанного маячка и других электронных вычислительных модулей других маячков того же резервуара и других резервуаров судна или плавучей платформы для осуществления обработки по указанным этапам 1.1)-1.3) и 2); причем активация указанных электронных вычислительных модулей происходит в случае превышения заранее определенного порогового значения амплитуды движений судна, предпочтительно значения угла наклона стенки корпуса судна.
Вспомогательное устройство типа инклинометра или инерциального блока позволяет обнаруживать собственные движения судна, такие как бортовую и килевую качку, рыскание, вертикальную, продольную и поперечную качку и др.
В соответствии с другим вариантом осуществления изобретения маячок не содержит каких-либо вспомогательных устройств для обнаружения собственных движений судна.
В частности, указанное устройство для обнаружения движений судна представляют собой инклинометр маятникового типа или инерциальный блок, предпочтительно выполненные с возможностью определения угла бортовой качки бортовой стенки корпуса судна или плавучей платформы, причем указанное пороговое значение угла бортовой качки составляет, по меньшей мере, 5°, а предпочтительно от 5° до 10° относительно вертикали.
В режиме ожидания устройство потребляет крайне малое количество энергии, т.к. вычислительный модуль работает в режиме ожидания по чрезвычайно простому циклу. Однако в случае возникновения потенциально критических условий вычислительный модуль анализирует все данные, поступающие от вибрационного датчика, и производит обработку сигнала, а результаты указанной обработки передаются в центральный контроллер в случае превышения, по меньшей мере, одного из пороговых значений.
В случае активации одного из маячков соответствующим ему инклинометром в оптимальном варианте также производится активация всех остальных маячков так, чтобы все маячки заведомо находились в рабочем режиме. Таким образом, обеспечивается высокий уровень избыточности системы активированных маячков, т.к. каждый из них может активироваться собственным инклинометром и передавать информацию о переходе в рабочий режим во все другие маячки, а также в центральный контроллер. Это позволяет радикально уменьшить вероятность того, что какой-либо из маячков останется в режиме ожидания.
В приведенном выше описании двух режимов активации электронного вычислительного модуля под «активацией электронного вычислительного модуля» следует понимать ситуацию, в которой такой модуль исходно находился в режиме ожидания, а затем автоматически перешел в рабочий режим для осуществления обработки и передачи данных по вышеописанным этапам b) и с); причем активация указанных средств 5d передачи производится указанным электронным вычислительным модулем 5b.
В соответствии с другим вариантом осуществления изобретения указанный электронный вычислительный модуль выполнен с возможностью активации согласно измерению порогового значения амплитуды ускорения (д) как функции от времени.
В оптимальном варианте на каждый из указанных маячков подается питание от источника питания, содержащего аккумуляторную батарею или ионистор (конденсатор чрезвычайно большой емкости), или предпочтительно литиевый гальванический элемент, который обеспечивает питание указанного вибрационного акселерометра, электронного вычислительного модуля, средств передачи и предпочтительно указанных устройств для обнаружения движений судна.
Также в оптимальном варианте указанный источник питания дополнительно содержит термопару, действующую по принципу эффекта Зеебека, холодный спай которой установлен между холодной внутренней стенкой резервуара и указанным маячком, который образует горячий спай термопары, причем указанная термопара позволяет генерировать постоянный ток, питающий указанный маячок и предпочтительно постоянно заряжающий указанную аккумуляторную батарею или ионистор.
В соответствии с предпочтительным вариантом осуществления изобретения указанные маячки жестко прикреплены к палубе судна и/или к боковой стенке системы поддержки и изоляции стенок указанного большого резервуара внутри корпуса судна и напротив бортовой стенки корпуса, причем указанные маячки расположены вблизи углов указанного большого резервуара на его продольных концах.
В соответствии с другими характеристиками указанных маячков:
- указанные маячки расположены напротив двугранного угла, образованного на стыке вертикальной продольной боковой стенки, вертикальной поперечной стенки и потолочной стенки указанного большого резервуара, или трехгранного угла, образованного двумя плоскостями потолочной стенки указанного большого резервуара, расположенными под углом друг к другу, и поперечной вертикальной стенкой указанного большого резервуара,
- указанные маячки прикреплены к указанной стенке сваркой или приклеиванием,
- каждый из указанных маячков содержит контейнер, в котором заключены указанные вибрационные датчики, электронный вычислительный модуль, средства передачи сигнала и, предпочтительно, вспомогательное устройство обнаружения, причем указанный контейнер прикреплен к указанной стенке и указанному источнику питания.
Поскольку маячки установлены в потенциально взрывоопасной атмосфере, они должны соответствовать жестким стандартам, известным как стандарты АТЕХ. Данные стандарты точно определяют конструктивные правила, касающиеся электрических контуров, герметичности контейнеров, уровней мощности передачи радиоантенны и т.д., исключающие возможность возникновения любых искр, которые могли бы привести к воспламенению газовой среды и, следовательно, к взрыву.
В особо предпочтительном варианте осуществления изобретения указанное судно представляет собой старое транспортное судно типа танкера для транспортировки сжиженного метана, переделанное в плавучее хранилище и поставленное на якорь в постоянном местоположении, причем уровень наполнения, по меньшей мере, одного из его резервуаров определяется как функция возмущения жидкости, которую он содержит, определенная и рассчитанная указанным устройством для обнаружения возмущения жидкости.
В соответствии с настоящим изобретением также предлагается способ обнаружения возмущения свободной поверхности жидкости внутри резервуара (резервуаров) судна, включающий в себя последовательные этапы, на которых:
1) осуществляют указанную обработку сигнала, предпочтительно после активации указанного электронного вычислительного модуля, когда движения судна достигают порогового значения, и
2) осуществляют указанную передачу значений, полученных на этапе 1), из электронного вычислительного модуля в центральный модуль.
Краткое описание чертежей
Другие особенности и преимущества настоящего изобретения станут ясны из нижеследующего описания, приведенного в качестве примера, не накладывающего каких-либо ограничений и содержащего ссылки на прилагаемые чертежи. На чертежах:
- на фиг.1 представлена в поперечном разрезе во фронтальной проекции плавучая платформа типа FSRU (Floating Storage and Regaseification Unit) для хранения и регазификации СПГ, оборудованная устройствами обнаружения движения свободной поверхности жидкости внутри резервуара 2 прямоугольного вертикального сечения, предусмотренного в указанной плавучей платформе,
- на фиг.2 представлено в поперечном разрезе во фронтальной проекции судно (танкер) для транспортировки СПГ, оборудованное устройствами обнаружения движения свободной поверхности жидкости внутри резервуара 2 с восьмиугольным сечением, предусмотренного в указанном судне,
- на фиг.3 представлено в виде сверху судно (танкер) для транспортировки СПГ, содержащее три резервуара, оборудованное устройствами обнаружения движения свободной поверхности жидкости внутри указанных резервуаров,
- на фиг.4 представлена в поперечном разрезе в боковой проекции нижняя часть резервуара, в правой части которого предусмотрено устройство обнаружения движения свободной поверхности жидкости груза с питанием, обеспечиваемым термопарой, действующей по принципу эффекта Зеебека,
- на фиг.4А представлено в увеличенном виде устройство по фиг.4,
- на фиг.5 представлены в виде сверху два резервуара СПГ, оборудованные устройствами обнаружения движения свободной поверхности жидкости с радиопередатчиками,
- на фиг.6 представлены в виде сверху два резервуара СПГ, оборудованные устройствами обнаружения движения свободной поверхности жидкости, соединенные между собою и с судовым мостиком судна локальной проводной сетью,
- фиг.7А-7В подробно иллюстрируют работу устройств для обнаружения «плескания», соответственно, в беспроводном варианте (7А) и в варианте с подсоединением к локальной проводной сети (7В),
- фиг.8А-8В подробно иллюстрируют режим работы устройств обнаружения движения свободной поверхности жидкости, или маячков, на основе информации о собственном движении судна,
- фиг.9А-9В подробно иллюстрируют режим срабатывания устройств обнаружения движения свободной поверхности жидкости на основе информации о срабатывании какого-либо из указанных устройств обнаружения движения свободной поверхности жидкости,
- фиг.10А-10В подробно иллюстрируют режим срабатывания устройств обнаружения движения свободной поверхности жидкости на основе информации о возникновении явлений движения свободной поверхности жидкости,
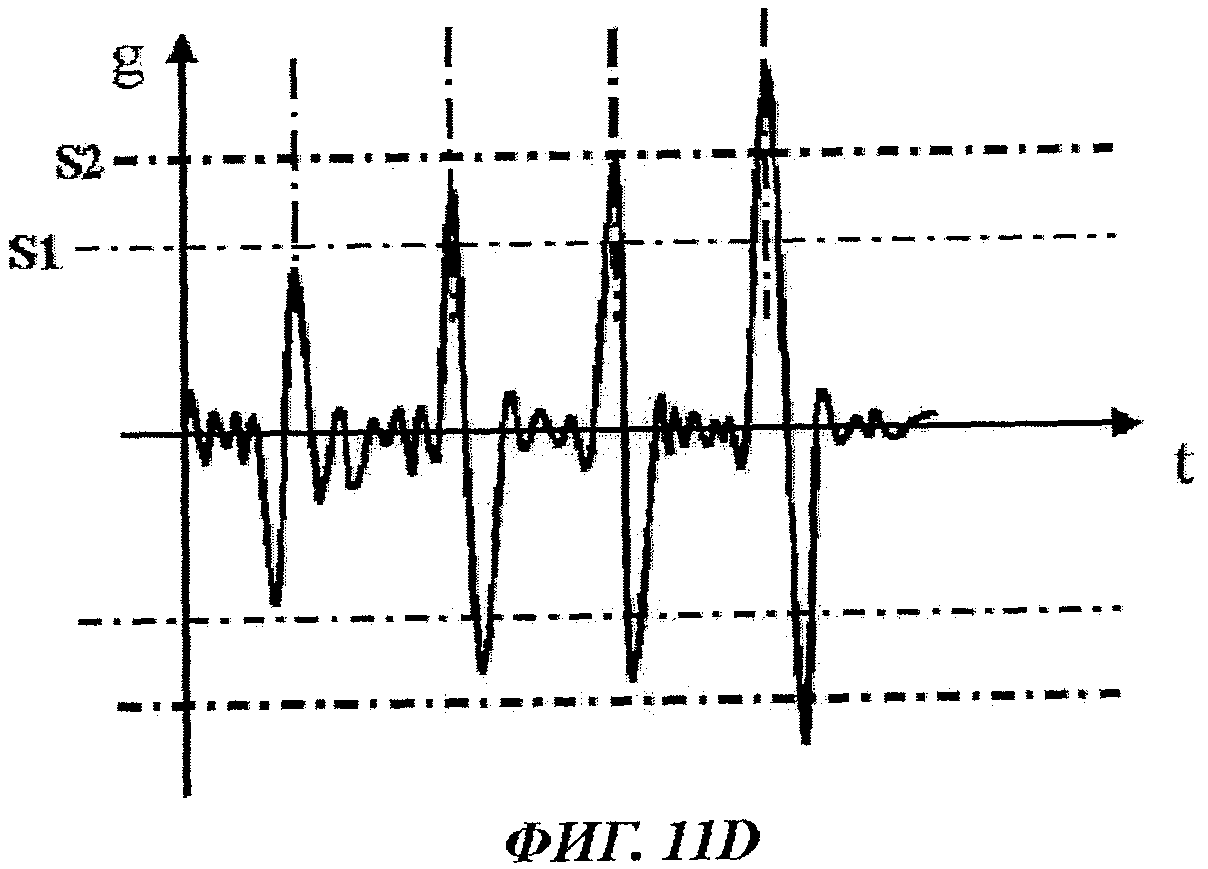
- на фиг.11A-11D представлены диаграммы сбора и обработки сигналов с проведением быстрого преобразования Фурье (БПФ) на разных этапах в процессе осуществления изобретения,
- на фиг.12А и 12В представлены диаграммы обработки сигналов с вычислением спектральной плотности мощности (СПМ) на разных этапах в процессе осуществления изобретения,
- на фиг.13А и 13В представлены диаграммы обработки сигналов с вычислением спектральной плотности энергии (СПЭ) на разных этапах в процессе осуществления изобретения.
Осуществление изобретения
На фиг.1 представлено в поперечном разрезе судно 1 типа FSRU, стоящее на якорях, с которыми оно связано концами (тросами) 1b, соединенными с лебедками 1с; судно установлено в районе нефтяного месторождения и принимает поступающий по трубопроводам (не представлены) газ, получаемый из устьев подводных скважин, причем указанный газ обрабатывают на борту судна в установках 1d с целью его охлаждения до температуры ниже -163°С и хранят в виде жидкости 3 в резервуарах 2 вплоть до его перегрузки в танкеры, которые обеспечивают перевозку указанного газа, по-прежнему в жидком виде, к потребителю. Резервуары 2 в форме прямоугольных параллелепипедов имеют объем 24000 м3, причем их ширина составляет 20 м, длина - 40 м, а высота - 30 м, а объем наиболее крупных резервуаров может достигать 60000 м3 и более. Судно оборудовано устройствами для обнаружения движения свободной поверхности жидкости, в дальнейшем описании называемыми «маячками» или же «устройствами для обнаружения "плескания"» согласно изобретению, а именно четырьмя автономными маячками 5-1, расположенными вблизи углов резервуаров на их продольных концах, соответственно, слева (по бакборту) в районе палубы 4а и внизу, внутри корпуса судна, в контакте со стенкой 2а-1 системы 2а термоизоляции резервуара 2, и справа (по штирборту) сверху и снизу внутри корпуса судна, в контакте со стенкой 2а-1 системы 2а термоизоляции резервуара 2.
Точнее, маячки 5-1 расположены вблизи:
- углов 2d, образующих двугранный угол на стыке продольной боковой стенки 2f и поперечной боковой стенки 2g, и
- углов 2d при дне, образующих двугранный угол на стыке донной стенки 2h, продольной боковой стенки 2f и поперечной боковой стенки 2g на продольном конце резервуара.
Резервуары 2 жестко прикреплены к корпусу 4а, 4b судна несущими конструкциями 11 в виде металлических двутавровых балок, равномерно распределенных и обеспечивающих соединение между, с одной стороны, поверхностями внешней стенки 2а-1 оболочки 2а резервуара 2 (в свою очередь, жестко прикрепленной к стенкам 2f, 2h резервуара 2) и, с другой стороны, внутренними стенками корпуса судна.
Маячки, находящиеся вблизи верхних углов 2d, расположены либо на палубе 4а плавучей платформы, либо у продольной боковой стенки 2а-1 изоляционной системы напротив бортовой стенки 4b корпуса судна.
Маячки, находящиеся вблизи нижних углов 2g, предпочтительно расположены у боковой стенки 2а-1 системы 2а изоляции резервуара 2 внутри корпуса судна и напротив его бортовой стенки 4b.
Работа маячков раскрыта более подробно в дальнейшем описании изобретения.
Свободная поверхность 3а сжиженного метана (СПГ), находящегося в резервуаре 2, в общем случае бывает несколько возмущена в соответствии с возмущением свободной поверхности жидкости, вызываемым волнением, ветром и течением, воздействующими на судно. В случае ухудшения гидрометеорологических условий такое возмущение может возрастать и приводить к возникновению значительного размера волн, бьющихся и отражающихся от стенок резервуара, и способных их повредить.
Во время перехода или стоянки на якоре судно подвержено воздействию гидрометеорологических условий, т.е. волнения, течений и ветра, в результате чего содержимое резервуаров подвержено постоянному возмущению, вызываемому указанными волнением, течениями и ветром. Таким образом, в пределах резервуара 2 возникает своего рода волнение, которое отражается от боковых стенок 2f, сохраняя при таком отражении собственную энергию, т.е. период и амплитуду волнения. Это приводит к возникновению возмущения поверхности, которое может быть более или менее сильным в зависимости от состояния моря. Волны, отражающиеся таким образом от стенок, складываются между собой, причем уровень возмущения может постепенно спадать, если сложение волн происходит в разной фазе, или возрастать, если происходит сложение волн, совпадающих по фазе.
Таким образом, при воздействии на судно 1 внешнего волнения 10, которое может возникать в открытом море или быть вызвано ветром или течением, или движения бортовой и килевой качки, рыскания, а также поперечной, продольной и вертикальной качки вызывают возмущение свободной поверхности жидкости, содержащейся в резервуаре 2, в результате чего внутри указанного резервуара могут возникнуть резонансные явления, порождаемые вышеописанным сложением множественных отражений от стенок резервуара.
Такие явления могут быть значительными и связаны с опасностью повреждения систем хранения и изоляции сжиженного газа. Такие явления могут возникать не только во время шторма, но и в умеренную погоду, в случае совпадения некоторых параметров, связанных с поведением судна, формой его резервуаров и уровнем наполнения указанных резервуаров.
Например, поперечное волнение малой амплитуды, например, с эффективной высотой волны Hs=1,25 м, при определенном периоде волнения, например, Т=8-10 с, не представляет никакой опасности при полностью заполненных или пустых резервуарах, а также на промежуточных уровнях заполнения; однако для некоторого точного значения уровня заполнения, например, равного 70-80%, именно в таких конкретных условиях могут возникнуть резонансные явления, вызывающие опасное поведение груза сжиженного газа, которое может привести к чрезвычайно сильному резонансному прибою на стенках резервуаров. Такие прибойные волны могут повредить или даже разрушить системы хранения или изоляции, что связано со значительной опасностью для судна и всей его команды.
Наиболее сильные движение и турбулентность обычно в большей степени возникают в вертикальных углах на продольных концах резервуара; в частности, наиболее сильные удары наблюдаются в трехгранных углах, образованных двумя вертикальными стенками, боковой и поперечной, и потолком резервуара.
Вертикальные углы 2d при потолке резервуара представляют собой зоны, в которых, благодаря форме трехгранного угла, образованного двумя вертикальными стенками и потолком резервуара, при наличии прибойной волны возникает опасность чрезвычайно сильных соударений; поэтому в оптимальном варианте маячки 5-1, 5-2 устанавливают вблизи указанных углов резервуара.
На фиг.2 представлено в поперечном разрезе другое судно 1 типа танкера для перевозки сжиженного метана, оборудованное устройствами 5-1,5-2 для обнаружения движения свободной поверхности жидкости или «плескания» по изобретению, причем явление «плескания» возникает здесь на поверхности 3b и в данном случае порождает прибойную волну в верхней части левой стенки 2f резервуара СПГ.
В левой части (по бакборту) палубы судна установлены два маячка 5-1 автономного типа, соединенные радиосвязью, с одной стороны, с центральным контроллером 6, предпочтительно представляющим собой персональный компьютер (ПК), установленный в центре управления, предпочтительно на судовом мостике, а с другой стороны, с другими маячками 5-1, как будет подробно разъяснено ниже. В правой части (по штирборту) палубы судна установлены два маячка 5-2 проводного типа, соединенные с тем же центральным контроллером 6 посредством локальной вычислительной сети 5d-3.
Более конкретно, в поперечном восьмиугольном сечении резервуара 2 потолочная стенка образована горизонтальной центральной стенкой 2е-2 и двумя наклонными боковыми потолочными стенками 2е-1, идущими вниз к продольным боковым стенкам 2f.
Таким образом, такой резервуар содержит трехгранные углы, расположенные на его продольных концах, а именно:
- первые трехгранные углы 2d, образованные продольной боковой стенкой 2f, концевой поперечной стенкой 2g и смежной с ними наклонной потолочной стенкой 2е-1, и
- трехгранные углы 2 с, образованные концевой поперечной стенкой 2g и двумя смежными с нею потолочными стенками 2е-1, 2е-2, расположенными под углом одна к другой.
Как подробно показано на фиг.7А и 7В, маячки 5-1 и 5-2 образованы следующими элементами:
1. вибрационный датчик 5а, представляющий собой вибрационный акселерометр, а точнее, акселерометр, обеспечивающий возможность измерения изменений вибрационного ускорения g вибрации стенки, на которой он установлен, в зависимости от времени. Такая вибрация стенки палубы 1а, на которой установлены такие датчики, связана с вибрацией стенок резервуара 2, поскольку резервуар установлен в корпусе судна или плавучей платформы и жестко прикреплен к нему несущей конструкцией 11, которая передает вибрацию резервуара 2 на корпус 1а-1е судна; более конкретно, акселерометры представляют собой трехосевые акселерометры, известные специалистам в данной области т.е. акселерометры, выполненные с возможностью измерения линейного ускорения в трех пространственных направлениях, в предпочтительном варианте - пьезорезистивные акселерометры, обеспечивающие возможность измерения ускорения в диапазоне от нуля до некоторого максимального значения. Для обеспечения возможности наиболее точного измерения вибрации такие маячки 5а приварены или приклеены к стенке, на которой они установлены,
2. электронный вычислительный модуль 5b, содержащий микропроцессор и встроенный модуль памяти,
3. средства 5d передачи данных (сигнала), которые могут быть двух типов для разных типов маячков:
- автономных маячков 5-1 или
- проводных маячков 5-2.
В случае автономных маячков 5-1 указанные средства передачи содержат антенну 5d-1 и приемопередатчик 5d-2, выполненные с возможностью преобразования электрических сигналов, поступающих из указанного вычислительного модуля 5b, в радиоволны, которые передаются антенной 5d-1.
В случае проводных маячков 5-2 указанные средства передачи содержат кабели 5d-3 соединяющие интерфейс 5d-4 для преобразования сигнала, позволяющий сделать его пригодным для передачи по указанным кабелям 5d-3, которые предпочтительно представляют собой оптоволоконные кабели, соединенные с интерфейсами 5d-4, которые преобразуют указанные данные электрического сигнала, поступающего из электронного вычислительного модуля 5b, в световые сигналы.
В соответствии с одним из вариантов осуществления изобретения маячки 5-1, 5-2 содержат устройство 5с обнаружения движения судна, которое может представлять собой инклинометр, например, маятникового типа, или инерциальный блок, предпочтительно выполненные с возможностью определения угла бортовой качки (крена) бортовой стенки 4b корпуса судна или плавучей платформы.
Такое устройство 5с выполнено с возможностью активации указанного электронного вычислительного модуля 5b данного маячка и других электронных вычислительных модулей данного резервуара и других резервуаров судна или плавучей платформы для осуществления указанных этапов b.1)-b.3) и с) обработки данных, причем активация указанных электронных вычислительных модулей производится по достижении амплитудой движения судна заранее определенного порогового значения, которое предпочтительно представляет собой величину угла наклона стенки корпуса судна, причем такое пороговое значение соответствует углу бортовой качки (крена) величиной не менее 5°, а предпочтительно - от 5° до 10° относительно вертикали.
На фиг.3 представлено в виде сверху судно (танкер) для транспортировки СПГ, содержащее три резервуара 2-1,2-2,2-3 восьмиугольного сечения, причем первый резервуар 2-1, расположенный слева, оборудован четырьмя маячками 5-1 автономного типа согласно изобретению, установленными снаружи палубы судна на вертикальных внешних углах 2d указанного резервуара, на его продольных концах.
Расположенный в середине резервуар 2-2 также оборудован четырьмя маячками 5-1, установленными внутри судна, в его верхней части, между внешним бортом 1е судна и внешней стенкой 2-1 изолирующей оболочки 2а резервуара 2-2 СПГ. Наконец, расположенный справа резервуар 2-3 оборудован восемью маячками 5-1 по фиг.2, расположенными, соответственно, с внешней стороны четырех углов 2d и четырех углов 2с, в местах соединения наклонных потолочных стенок 2-1 с центральной стенкой 2-2 потолка резервуара, как показано в разрезе на фиг.2.
Устройства для обнаружения движения свободной поверхности жидкости, или маячки 5-1, 5-2 установлены либо в непосредственном соприкосновении с внешней стенкой 4а, 4b судна, предпочтительно на уровне палубы 4а указанного судна, как показано на фиг.2, либо внутри судна, например, в проходе, предусмотренном в пространстве между бортом 4b судна и изоляционной оболочкой 2а резервуара СПГ, как показано на фиг.1 и 4-4А. Во всех вариантах устройство 5-1, 5-2 для обнаружения движения свободной поверхности жидкости жестко прикреплено к стенке, на которой оно установлено. Оно механически прикреплено либо при помощи сварки 5-4, либо при помощи заклепок, либо, в предпочтительном варианте, просто приклеено к стенке так, чтобы обеспечить полную передачу любой вибрации указанной стенки на устройство 5-1, 5-2 с минимальными потерями. Таким образом, устройства 5-1, 5-2 для обнаружения движения свободной поверхности жидкости в некотором роде «слушают» все, что происходит внутри резервуаров для хранения СПГ.
Устройство 5 для обнаружения «плескания» может быть либо устройством 5-1 автономного типа, которое передает информацию по радиосвязи, как подробно показано на фиг.5 и 7А, либо устройством 5-2 проводного типа, которое передает информацию, например, через локальную проводную вычислительную сеть 5d-3, как подробно показано на фиг.6 и 7В.
На фиг.7А представлено устройство 5-1 для обнаружения «плескания», или маячок автономного типа. Оно состоит из трехосевого акселерометра 5а, связанного соединением 5а-1 с вычислительным модулем 5b, причем питание на оба эти элемента поступает от ионистора или аккумуляторной батареи 5е, а в предпочтительном варианте - от литиевого гальванического элемента с крайне долгим сроком службы. Данные, получаемые в результате вычислений, производимых вычислительным модулем 5b, передаются по радиосвязи при помощи приемопередатчика 5d-2, оборудованного антенной 5d-1.
В случае устройства 5-2 проводного типа, представленного на фиг.7В, оно состоит из трехосевого акселерометра 5а, соединенного с вычислительным модулем 5b, причем питание на оба эти элемента поступает через проводное соединение 5d-6 из сети 5d-3. Данные, получаемые в результате вычислений, производимых вычислительным модулем 5b, передаются в центральный модуль 6.
На фиг.5 представлены в плане два резервуара 2-1, 2-2, на четырех углах каждого из которых предусмотрено по маячку 5-1 автономного типа, непосредственно после активации одного из маячков 5а-1 устройством 5с инклинометра, в результате чего указанный маячок осуществляет радиосвязь с центральным контроллером 6 и со всеми остальными маячками 5-1 обоих резервуаров с целью их активации.
На фиг.6 аналогичным образом представлены в плане два резервуара 2-1, 2-2, на четырех углах каждого из которых предусмотрено по маячку 5-2 проводного типа, осуществляющие связь с центральным контроллером 6 и со всеми остальными маячками через локальную сеть 5d-3.
Режим работы маячков обоих типов, т.е автономных маячков 5-1 и проводных маячков 5-2, одинаков. Он подробно описан со ссылками на фиг.8, 9 и 10.
В отсутствие движений судна все маячки находятся в покое, в режиме ожидания, в котором их энергопотребление крайне мало, что представляет значительное преимущество в случае использования автономных маячков 5-1 с питанием от аккумуляторных батарей. В случае активации любого из маячков он осуществляет индивидуальный обмен сигналами с управляющим компьютером 6, предпочтительно расположенным на мостике, как показано на фиг.1. Кроме того, указанный маячок одновременно передает информацию на все остальные маячки и активирует их, в результате чего они переходят в режим сбора данных, обработки данных и осуществления связи с центральным контроллером 6.
На фиг.8А представлена ситуация, в которой активация одного из маячков вызвана устройством 5с, которое может представлять собой инклинометр или инерциальный блок, чувствительный к собственным движениям судна. Радиосигнал 8а передается в центральный контроллер 6, а радиосигнал 8b передается на все маячки группы с целью их активации. После активации маячка трехосевой акселерометр 5а передает данные в вычислительный модуль 5b, который обрабатывает их в соответствии с процедурой, описанной ниже, а затем передает данные, полученные в результате обработки сигнала, по радиосвязи в контроллер 6. Указанный контроллер 6 обрабатывает все данные, полученные от различных маячков 5-1, 5-2, что позволяет ему определить картину возмущения свободной поверхности жидкости, находящейся в резервуаре, и оценить, связано ли такое возмущение с опасностью возникновения «плескания», которое может привести к повреждению оборудования.
Контроллер 6 предпочтительно вводит данные, полученные от разных маячков, в математическую модель, которая позволяет получить команды управления судном, изменяющие скорость и/или направление его движения так, чтобы уменьшить или полностью устранить опасность возникновения «плескания».
В ситуации, представленной на фиг.9А, активация вычислительного модуля 5b маячка 5 вызвана радиосигналом 8b, поступающим непосредственно от первого маячка, или радиосигналом 8с, поступающим от центрального контроллера 6, который, в свою очередь, получил данные, поступающие от указанного первого маячка. Процесс сбора и передачи данных, представленный на фиг.9В, идентичен описанному выше со ссылками на фиг.8В.
Наконец, на фиг.10А представлена ситуация, в которой активация маячка вызвана сигналом, поступающим от его акселерометра 5а, причем данный сигнал вызван, например, возникновением явления резонанса свободной поверхности жидкости СПГ, в то время как собственные движения судна незначительны и не достигают порогового значения срабатывания устройства 5с, которое может представлять собой инклинометр или инерциальный блок. Маячок отправляет сигнал 8а в центральный контроллер 6 вместе с сигналом 8b во все остальные маячки с целью их активации. Процесс сбора и передачи данных, представленный на фиг.10В, идентичен описанному выше со ссылками на фиг.9В.
В случае использования проводных соединений 5d-2 те же данные, что описаны выше со ссылками на фиг.8, 9 и 10 для случая соединений по радиосвязи, передают в соответствии с известными решениями по локальной проводной сети 5d-3, имеющей топологию типа шины, звезды или кольца, которая связывает все маячки и центральный контроллер 6.
Обработка сигналов в маячке 5 схематично проиллюстрирована на фиг.11-13.
В нормальном режиме работы, т.е. вне стадий самонастройки, описанных ниже, в случае срабатывания маячка, например, в результате превышения бортовой и/или килевой качкой заданного порогового значения, зарегистрированного, например, инклинометром 5с, вычислительный модуль получает непосредственно из измерения сигнала информацию о точном значении периода указанной бортовой или килевой качки, что позволяет оценить вероятность возмущения и усиления движения свободной поверхности жидкости, которое может выродиться в «плескание», при помощи математического моделирования поведения свободной поверхности жидкости в различных резервуарах. На основе представленного на фиг.11А временного сигнала, соответствующего указанному периоду возмущения, т.е. указанному периоду бортовой и/или килевой качки, программное обеспечение, предусмотренное в вычислительном модуле 5b, может производить обработку различных типов в соответствии с конфигурацией указанного сигнала.
Так, в случае импульсного малорезонансного сигнала, т.е. сигнала, содержащего малое количество гармонических составляющих, в соответствии со способами, известными специалистам в области обработки сигналов, систематически используется хорошо применимое к нему быстрое преобразование Фурье (БПФ), преобразующее указанный временной сигнал, который может иметь большую или малую амплитуду, но предпочтительно имеет некоторую центральную частоту, в сигнал g=f(Гц).
На фиг.11В и 11С представлены зависимости ускорения (g) от частоты (Hz), соответствующие результатам обработки сигнала посредством БПФ (фиг.11В) и последующего отфильтровывания фоновых шумов (фиг.11С). На фиг.11D представлена зависимость ускорения от времени после фильтрации и обработки сигнала с использованием обратного быстрого преобразования Фурье (ОБПФ), на которой ясно видны превышения заранее определенных пороговых значений S1, S2 и т.д.
На основе данного процесса БПФ в соответствии со способами, известными специалистам в области обработки сигналов, вычисляется спектральная плотность мощности (СПМ=g2Hz). Данное вычисление предпочтительно в случае сигналов ударного типа, возбуждающих всю конструкцию судна и содержащиеся в нем конструкции резервуара и опор резервуара, т.е. действующих как на глобальном, так и на локальном уровне, и имеющих резонансную частоту, причем также происходит возбуждение соседних частот и их гармоник.
Вычисление спектральной плотности энергии (СПЭ=g2×s/Hz), известное специалистам в области обработки сигналов, предпочтительно в случае переходного сигнала, короткого или длинного, так как оно позволяет оценить посредством усреднения длительность временного сигнала, отобранного для БПФ, например, равную Δt=2 с, как показано на фиг.11А.
На фиг.12А и 12В представлены графики СПМ, на которых в соответствии с известными методиками по оси ординат отложены значения функции g2Hz, а по оси абсцисс - частота Hz, причем кривая представляет, соответственно, результаты обработки сигнала функцией СПМ (фиг.12А) и последующей фильтрации фоновых шумов (фиг.12В). Тогда спектральная мощность g2 равна интегралу функции g2Hz по фиг.12В, т.е. площади заштрихованной области на фиг.12В, заключенной между кривой, осью ординат, верхним порогом Fb фильтрации и нижним порогом Fa фильтрации.
На фиг.13А и 13В представлены графики СПЭ, на которых в соответствии с известными методиками по оси ординат отложены значения функции g2×s/Hz, т.е. квадрата ускорения, умноженного на время и деленного на частоту, а по оси абсцисс - частота Hz, причем кривая представляет, соответственно, результаты обработки сигнала функцией СПЭ (фиг.13А) и последующей фильтрации фоновых шумов (фиг.13В). Тогда спектральная энергия (g2×t) равна интегралу функции g2×s/H2 по фиг.13В, т.е. площади заштрихованной области на фиг.13В, заключенной между кривой, осью ординат, верхним порогом фильтрации и нижним порогом фильтрации.
После обработки сигнала в вычислительном модуле в соответствии с тремя вышеописанными режимами вычислений, полученные данные передаются в центральный контроллер 6 только в случае превышения максимальных пороговых значений.
Для случая вычисления СПМ, результат которого представлен на фиг.12В, пороговое значение срабатывания передачи данных в центральный контроллер 6 определено следующим образом:
либо если кривая превышает предельное значение pmах; в таком случае, передается величина пика (или пиков) P0 мощности и соответствующее ему значение частоты (частот) F0, а также суммарная спектральная мощность, соответствующая площади заштрихованной на данном графике области,
- либо если суммарная спектральная мощность, определяемая интегралом кривой по фиг.12В превышает заданное значение, т.е. площадь заштрихованной области на фиг.12В превышает заранее установленное пороговое значение; в таком случае, передается значение указанной суммарной спектральной мощности, а также, в случае необходимости, определенные ранее величины пиков и соответствующие им значения частоты.
Для случая вычисления СПЭ, результат которого представлен на фиг.13В, пороговое значение срабатывания передачи данных в центральный контроллер 6 определено следующим образом:
- либо если кривая превышает предельное значение emax; в таком случае, передается величина пика (или пиков) е1, е2 энергии и соответствующая ей частота (частоты) F1, F2, а также суммарная спектральная энергия, соответствующая площади заштрихованной на данном графике области,
- либо если суммарная спектральная энергия, представленная интегралом кривой по фиг.13В превышает заданное значение, т.е. площадь заштрихованной области на фиг.13В превышает заранее установленное пороговое значение; в таком случае, передается значение указанной суммарной спектральной энергии, а также, в случае необходимости, определенные ранее величины пиков и соответствующие им значения частоты.
На фиг.12В представлен один пик высотой Р0, превышающий заранее заданное пороговое значение pmах.
На фиг.13В представлены два пика энергии e1 и е2, не превышающие заданное пороговое значение emax, в результате чего сигнал, соответствующий данным пикам, не вызывает активации передачи данных в центральный контроллер 6.
В случае превышения, по меньшей мере, одного из заранее установленных пороговых значений в ходе различных операций обработки временного сигнала по фиг.11А, описанных выше в связи с вычислениями БПФ, СПМ и СПЭ, все результаты различных операций обработки данных или их часть, а предпочтительно - все единовременные результаты трех операций обработки данных, передаются в центральный контроллер 6 для объединения с данными, поступающими от других датчиков, в математической модели, представляющей поведение свободной поверхности жидкости в различных резервуарах для хранения СПГ судна.
В результате использования такого принципа работы вычислительный модуль 5b маячка 5 осуществляет все вычисления в режиме реального времени, но передает в центральный контроллер 6 лишь результаты вычислений, представляющие собой компактные и быстро передаваемые данные, в отличие от временного сигнала, передача которого постоянно загружала бы используемые средства передачи, будь то средства радиосвязи или локальная сеть. Так, временной сигнал длительностью δt=2 с занимал бы средства передачи данных в течение 100% времени, в то время как передача результатов вычислений ОБПФ, СПМ и СПЭ происходит лишь в случае превышения одного из пороговых значений и занимает временной промежуток длительностью порядка 0,1-0,5 с, что приводит к быстрому высвобождению средств передачи и резко ограничивает энергопотребление маячка, основную часть мощности в котором потребляют указанные средства передачи.
Вычислительный модуль 5b постоянно получает данные от датчика 5а, обрабатывает их в непрерывном или ином режиме, сохраняет их во внутренней памяти и впоследствии анализирует глобальное поведение системы, как правило, в то время, когда судно находится на защищенной стоянке или в спокойных условиях, т.е. в отсутствие опасности движения свободной поверхности жидкости и, в частности, «плескания». Такие наблюдения, коррелируемые с уровнем бортовой и килевой качки судна, позволяют оценить собственные фоновые шумы судна в отсутствие значительного движения свободной поверхности жидкости или явлений «плескания» и, таким образом, определить пороговые значения, описанные со ссылками на фиг-11D, 12В и 13В и относящиеся, соответственно, к операциям вычисления ОБПФ, СПМ и СПЭ. Со временем такие заранее установленные пороговые значения могут быть либо автоматически скорректированы вычислительным модулем 5b, работающим в режиме самонастройки после осуществления синтеза результатов всех трех одновременных операций обработки, описанных выше, либо изменены центральным контроллером после глобальной обработки данных, полученных от всех маячков в течение длительного периода времени, с корреляцией такой глобальной обработки с реальным поведением судна и его груза сжиженного газа.
Спектральным плотностям соответствуют следующие английские термины, известные специалистам в данной области:
- СПМ: PSD (Power Spectral Density),
- СПЭ: ESD (Energy Spectral Density).
Фильтрация сигналов позволяет отсеять паразитные частоты, как правило, сосредоточенные в области крайне низких и крайне высоких частот. Такая фильтрация позволяет удалить так называемые фоновые шумы, т.е. шумы, создаваемые окружением судна. Таким образом, можно получить представление возмущения свободной поверхности жидкости, находящейся в резервуаре, в частности, в терминах спектральной энергии, т.к. измеряемое вибрационное ускорение связано с массой жидкости, движущейся внутри резервуара, а указанная спектральная энергия представляет собой меру локального возмущения свободной поверхности жидкости внутри резервуара. Затем полученные значения спектральной энергии сравниваются с заранее установленными пороговыми значениями в режиме реального времени.
В случае достижения или превышения какого-либо заранее установленного порогового значения вычислительный модуль 5b осуществляет обратное быстрое преобразование Фурье (ОБПФ), что позволяет вернуться к сигналу, представляющему изменения ускорения g как функции от времени t, уже исключив на предшествующих этапах фильтрации указанные фоновые шумы. Таким образом, в режиме реального времени доступны сигналы изменения ускорения для свободной поверхности жидкости как функции от времени, и вероятность возникновения потенциально опасного «плескания», а также пиков ускорения, соответствующих реальным ударам о стенки резервуаров или же квази-ударам, т.е. нарастающим резонансам, которые могут в течение крайне короткого времени привести к возникновению ударов, опасных для целостности корпуса и, следовательно, всего судна.
Такие данные, обработанные в вычислительном модуле 5b, передаются через регулярные или нерегулярные интервалы в центральный контроллер 6, который обрабатывает все полученные данные и точно устанавливает место возникновения явления «плескания», определяя номер соответствующего резервуара и место зарегистрированного возмущения или ударов, связанных с «плесканием», а также в случае необходимости определяет масштаб такого явления.
Как показано на фиг.11D, процедура вычислений в вычислительном модуле 5b в оптимальном варианте определяет несколько пороговых значений, например, два пороговых значения:
- первое пороговое значение S1, до достижения которого данные передаются в стандартном режиме, через регулярные и достаточно большие интервалы, а по превышении которого интервал между двумя передачами данных уменьшается, например, в два раза, т.к. существует опасность возникновения резонансных явлений, которые могут привести к опасному «плесканию»,
- второе пороговое значение S2, по превышении которого частота передач данных значительно увеличивается, например, в 5 раз, причем центральный контроллер 6 считает данный маячок приоритетным по сравнению с другими маячками, пока те не достигли указанного порогового значения S2.
Режим работы маячка, подробно описанный выше, основан на самонастройке (автоматической подстройке) вычислительного модуля с течением времени, причем указанная самонастройка приводит к постепенному изменению некоторых параметров программного обеспечения, встроенного в вычислительный модуль 5b. Такие параметры заранее устанавливаются при запуске оборудования на борту судна и изменяются с течением времени как результат самонастройки в соответствии с общим поведением системы и результатами анализа, осуществляемого различными маячками и центральным контроллером 6. При этом изначально основным параметрам присваиваются консервативные значения, т.е. устанавливаются, как правило, достаточно низкие пороговые значения, которые впоследствии автоматически корректируются в сторону более жестких и более реалистичных значений в соответствии с реальным поведением свободной поверхности жидкости и соответствующего поведения судна. Так, при запуске оборудования, когда судно, например, находится в порту или совершает переход на крейсерской скорости в условиях спокойного моря, анализ сигналов, поступающих от датчиков 5а, позволяет весьма быстро выделить фоновые шумы, свойственные данной системе в различных нормальных ситуациях, и эффективно отсеять их в процессе обработки типа БПФ. В число основных параметров, устанавливаемых изначально, но которые могут изменяться при помощи самонастройки со временем, в течение, например, нескольких дней, нескольких недель, нескольких месяцев или нескольких лет, в частности, входят:
- диапазоны значений (минимальные и максимальные значения) периодов бортовой качки судна, которые могут породить опасное движение свободной поверхности жидкости, в зависимости от известных уровней заполнения резервуаров,
- диапазоны значений (минимальные и максимальные значения) частотных полос, используемых при фильтрации сигналов, а также заранее установленные пороговые значения S1, S2 и т.д. для вычислений БПФ и ОБПФ,
- уровни спектральной энергии или спектральной мощности, определяемые для вычислений СПМ и СПЭ.
В совокупности такие параметры образуют на практике математическую модель общего поведения свободных поверхностей жидкости с соответствующими переменными, нахождение которых внутри определенных диапазонов значений связано с опасностью возникновения резонансов, способных вызывать опасные явления «плескания», в то время как вне таких диапазонов значений опасность возникновения резонансов минимальна или практически отсутствует.
Маячки 5 содержат встроенные вычислительные средства значительной мощности, что позволяет передавать по каналам радиосвязи (в случае маячков 5-1 автономного типа) или по локальной сети 5d-3 (в случае маячков 5-2 проводного типа) только результаты обработки сигналов, значительно снижая тем самым загрузку центрального контроллера 6, который лишь объединяет данные с результатами обработки сигналов, обобщает их и выдает в распоряжение капитана судна точную информацию о поведении груза в каждом из резервуаров для хранения СПГ.
Все маячки, как маячки 5-1 автономного типа, так и маячки 5-2 проводного типа, установлены в газоопасной среде и должны быть выполнены с защитой от воспламенения, т.е. соответствовать европейским стандартам, известным под названием «АТЕХ». Для этого все конструктивные элементы маячков 5, т.е. вибрационные датчики 5а, вычислительный модуль 5b, средства 5с обнаружения движения судна и источник 5е питания, заключены в кожух 5-3, соответствующий стандартам АТЕХ. Вне кожуха 5-3, изображенного на фиг.7А и 7В пунктирной линией, расположена только часть передающих средств, таких как радиоантенна 5d-1 и проводные сети 5d-3.
Использование маячков 5-2 проводного типа требует установки локальной вычислительной сети и обеспечения энергопитания. Однако в оптимальном варианте локальная сеть 5d-3 выполнена на основе оптического волокна, а питание маячка, также в оптимальном варианте, обеспечивается при помощи встроенной аккумуляторной батареи 5е, как в случае автономных маячков 5-1. Это значительно упрощает установку различных компонентов в данных условиях с необходимостью соблюдения стандартов АТЕХ.
В оптимальном варианте электронные компоненты вычислительного модуля 5b, используемые для обработки сигнала, а также компоненты, используемые для средств интерфейса передачи (интерфейс 5d-2 в случае автономного маячка 5-1 и интерфейс 5d-4 в случае проводного маячка 5-2) обладают низким энергопотреблением в рабочем режиме и крайне низким или практически нулевым энергопотреблением в режиме ожидания. В таком случае, энергия для питания таких маячков поступает от аккумуляторных батарей 5е с долгим сроком службы и долгим временем разрядки, а в оптимальном варианте - от литиевых гальванических элементов, срок службы которых превышает 2 или 3 года. Таким образом, оборудование сохраняет работоспособность в течение нескольких лет, причем в оптимальном варианте замена всех элементов питания производится систематически в ходе регулярного обслуживания судна.
В предпочтительном варианте осуществления изобретения, проиллюстрированном на фиг.4 и 4А, энергопитание автономного маячка обеспечивает устройство 9, представляющее собой термопару, работающую по принципу эффекта Зеебека, и установленное внутри корпуса судна, между бортом 4b и изоляционной стенкой 2а-1 резервуара. Для этого маячок 5-1 устанавливают на изоляционной стенке 2а-1 резервуара, в которой заранее просверлено отверстие 9а небольшого диаметра, например, 5 мм, проходящее сквозь данную стенку до стенки 2, 2f первичного или вторичного уплотнения; затем в отверстие вставляют термопару так, чтобы холодный спай 9-2 находился в соприкосновении с внутренней холодной стенкой 2, 2f, которая в случае первичного уплотнения находится при температуре -163°С. Холодный спай в соответствии с известным способом соединяют при помощи двухжильного провода с горячим спаем, расположенным в корпусе 9-3, который находится при температуре окружающей среды, т.е. при температуре от 10°С до 20°С. В соответствии с известным принципом эффекта Зеебека (термоэлектрического эффекта) такая разность температур создает электрический ток, обеспечивающий постоянное питание маячка и, в предпочтительном варианте, постоянную зарядку аккумуляторной батареи (не представлена) или ионистора, т.е. конденсатора чрезвычайно большой емкости. Таким образом, поскольку в режиме ожидания энергопотребление практически отсутствует, зарядка аккумуляторной батареи или ионистора происходит с максимальной эффективностью, а при переходе маячка в рабочий режим операции обработки сигналов и передачи данных полностью потребляют вырабатываемый ток, а недостающий ток поступает от накопительных элементов, т.е. указанной батареи или указанного ионистора. Преимущество такой конструкции состоит в ее высокой надежности практически неограниченном сроке работы без необходимости в каком-либо обслуживании в течение всего срока эксплуатации судна, разумеется, при условии, что срок службы электронных компонентов сравним со сроком эксплуатации судна, который может превышать 20-30 лет и более.
В рамках настоящего изобретения описаны маячки 5-1 автономного типа и маячки 5-2 проводного типа. Каждый из этих типов обладает своими преимуществами. Так, в применении к существующим судам маячки 5-1 автономного типа обладают определенным преимуществом, поскольку такие маячки соответствуют стандартам АТЕХ и заключают в себе всю необходимую функциональность. Они могут быть установлены на уже существующем оборудовании и закреплены на палубе или внутри корпуса судна, на изоляционной стенке, простым приклеиванием, что не требует проведения никаких работ, обычно считающихся опасными при проведении во взрывоопасных средах.
Использование маячков 5-2 проводного типа требует установки локальной сети по всей длине судна до центрального контроллера 6, расположенного на судовом мостике. Конфигурация такого типа предназначена, в частности, для вновь строящихся судов, в то время как маячки 5-1 автономного типа и в этом случае обладают значительными преимуществами, так как их использование полностью устраняет необходимость в развертывании указанной локальной сети 5d-3, связанном со значительными расходами, так как длина таких судов достигает нескольких сотен метров. В установках такого типа на большие расстояния стоимость прокладки локальной сети часто составляет от 70 до 85% общей стоимости установки. Таким образом, использование автономных маячков резко сокращает стоимость установки, в то же время упрощая установку таких маячков и их внедрение в газоопасную среду, требующую применения оборудования по стандартам АТЕХ.
Процедуры обеспечения соответствия стандартам АТЕХ известны специалистам в данной области; компоненты, используемые в составе маячков 5-1 и 5-2, в частности, датчик 5а и вычислительный модуль 5b в соответствующем стандартами АТЕХ корпусе 5-3 входят в ассортимент изделий ВАСС компании CEGELEC (Франция). Компоненты 5d-2, обеспечивающие радиопередачу данных от автономного маячка 5-1, выпускает, например, компания ASM (Австрия) под обозначением ASCell3911. Такие компоненты осуществляют обмен сигналами на разрешенных стандартных частотах ISM 868 МГц, 433 МГц и 315 МГц, что соответствует требованиям законодательства различных промышленно развитых стран. Данные компоненты обладают ограниченным радиусом действия, от 25 до 1000 м в зависимости от модели и от типа среды (закрытая или открыта среда) и энергопотреблением в режиме передачи от 10 до 12 мА при напряжении 2-3,5 В, а в режиме ожидания - порядка 0,5 мкА, т.е. практически нулевым, что является значительным преимуществом с точки зрения срока службы аккумуляторных батарей или литиевых гальванических элементов. Компоненты данного типа встроены в описанный выше корпус 5-3, соответствующий стандартам АТЕХ.
В случае использования соединений внутри судна при установке маячков между бортом судна и резервуаром для хранения СПГ в оптимальном варианте дополнительно устанавливаются промежуточные маячки, предназначенные исключительно для приема сообщений и их дальнейшей передачи. Таким образом, переходя от маячка к маячку, сообщение постепенно доходит до каждого из маячков, а также до центрального контроллера 6, расположенного на судовом мостике.
В рамках описания маячка был описан режим активации указанного маячка с использованием инклинометра или инерциального блока 5с; однако в оптимальном варианте для выполнения данной функции выгодно использовать основной трехосевой акселерометр 5а при условии, что он обладает достаточной чувствительностью для корректного обнаружения движений судна, а также пороговыми значениями, обеспечивающими срабатывание данного маячка. Для этого вычислительный модуль 5b постоянно анализирует сигналы, поступающие от указанного основного акселерометра и выявляет движения судна и, в частности, его бортовую и килевую качку, активируя в случае необходимости описанную выше процедуру сбора, обработки и передачи данных.
Пусть, например, на танкере для перевозки сжиженного метана, содержащем четыре резервуара СПГ суммарным объемом 135,000 м3, на каждом из углов 2с, 2d каждого из указанных резервуаров установлено по автономному маячку, причем указанные маячки установлены на палубе 4а.
Каждый из маячков заранее настроен на обработку сигналов, поступающих от трехосевого акселерометра 5а в диапазоне периодов колебаний свободной поверхности жидкости, соответствующем волнению с периодом от 4-5 секунд до 15-18 секунд. Период 6t наблюдения для вычисления БПФ, представленный на фиг.10А, принят равным 6t=2 с, что, по существу, соответствует двум циклам БПФ для коротких периодов и до 9 циклов БПФ для длинных периодов.
Каждый из маячков 5 работает в режиме постоянного наблюдения, т.е. постоянно осуществляет сбор данных о движениях судна (бортовой и килевой качке и т.д.), но в режиме ожидания относительно обработки и передачи данных, т.е. практически не потребляет энергии. В случае достижения заранее определенного порога срабатывания, например, угла бортовой качки в 8°, производятся вычисления БПФ и другие вычисления, связанные со спектральной энергией, с заранее установленным периодом наблюдений 5t=2 с. Затем вычислительный модуль сравнивает каждые данные с эталонными данными после фильтрации, произведенной в соответствии с описанием, приведенным выше со ссылками на фиг.10С. Если данная энергия превосходит указанное эталонное значение, производятся вычисления ОБПФ с целью выявления возможных ударов и квазиударов и их классификации по амплитуде в соответствии с заранее установленными пороговыми значениями S1, S2, S3 и т.д. Все вычисления производятся при помощи вычислительного модуля 5b с очень высокой скоростью, за время, значительно меньшее соответствующего периода качки; затем результаты вычислений сохраняются в модуле памяти вычислительного модуля 5b. Одновременно с этим, когда требуется, результаты передаются в центральный контроллер 6 через модуль радиосвязи или по локальной сети 5d-3. В указанном контроллере полученные данные объединяются с синхронными или квазисинхронными данными, поступающими от каждого из остальных маячков, установленных на судне, после чего капитан судна получает точную информацию о возбуждении свободной поверхности жидкости в каждом из резервуаров судна.
Данные, собираемые каждым из маячков, сохраняются и обрабатываются в его внутренних элементах. С течением времени, по прошествии нескольких дней, нескольких недель или нескольких месяцев плавания и сбора данных, различные заранее установленные пороговые значения корректируются, в сторону повышения или понижения, при помощи простой процедуры самонастройки (автоматической подстройки) вычислительного модуля 5b. Результаты указанных корректировок передаются через регулярные промежутки времени в контроллер 6, который обеспечивает согласованность всех маячков. При необходимости центральный контроллер 6 может воздействовать на каждый из маячков посредством простой передачи по радиосвязи или по локальной сети 5d-3 с целью изменения заранее установленных пороговых значений или с целью изменения программ вычислений, сбора данных или самонастройки. Аналогичным образом, центральный контроллер может изменять в дистанционном режиме указанные эталонные пороговые значения. В оптимальном варианте такие изменения также осуществляются в ходе операций обслуживания каждого из маячков или при замене маячков на маячки нового поколения.
Устройство согласно изобретению представляет особенный интерес в случае старых судов для перевозки сжиженного метана, приспособленных к использованию в качестве неподвижных плавучих хранилищ, устанавливаемых либо вблизи мест производства СПГ, либо в береговой зоне в качестве терминалов приема и регазификации. Действительно, такие суда устаревшей конструкции часто обладают ухудшенной или даже нарушенной изоляцией резервуаров в связи с долгим сроком службы, который в некоторых случаях может превышать 30-40 лет. Кроме того, средства передвижения судов такого типа также могут быть устаревшими в силу низкой производительности старых двигателей, в результате чего такие суда отправляют на утилизацию, в то время как основная конструкция судна может по-прежнему оставаться вполне работоспособной. Таким образом, конверсия таких судов представляет большой интерес, поскольку необходимость в использовании основного двигателя отсутствует, а недостаточная эффективность изоляционной системы не является критическим недостатком, а в некоторых случаях даже может быть выгодна. Действительно, низкая эффективность изоляционной системы приводит к усилению эффекта «выкипания» (boil-off), т.е. к значительной газификации СПГ в результате тепловых потерь, что в условиях приемных терминалов является не недостатком, а преимуществом, поскольку назначение таких терминалов состоит именно в регазификации газа перед его отправкой на сушу или в его преобразовании в электроэнергию на локальных теплоэлектростанциях. Кроме того, такие танкеры для перевозки метана старого типа могли совершать переходы только с полной загрузкой или практически пустыми: переходы с частичной загрузкой для них были запрещены, так как они не обладали достаточной защитой от явлений «плескания». Установка устройств для обнаружения возмущения жидкости согласно изобретению при таком использовании старых метановых танкеров позволяет быстро получить точные сведения о поведении жидкости в зависимости от состояния моря и разработать режимы эксплуатации, обеспечивающие высокий уровень безопасности работы, устанавливая уровень наполнения каждого из резервуаров в соответствии с возможностью возбуждения при данном уровне наполнения и данном состоянии моря. Таким образом, к концу предварительного периода эксплуатации математическая модель может быть скорректирована при помощи процедур автоматической подстройки, что позволит определить критические уровни наполнения для различных состояний моря. В таком случае, используя перекачку СПГ из одного резервуара в другой при возникновении потенциально критических условий, легко исключить наличие в каком-либо из резервуаров соответствующего критического уровня наполнения, что обеспечит предотвращение возникновения опасных явлений «плескания».
Реферат
Изобретение относится к области судостроения и касается судов или плавучих платформ, предназначенных для перевозки или хранения жидкости, в частности криогенной перевозки сжиженного природного газа или иных газов в сжиженном состоянии. Предлагается судно или плавучая платформа (1) для транспортировки или хранения жидкости (3), представляющей собой сжиженный газ, предпочтительно метан, этилен, пропан или бутан, охлажденный в по меньшей мере одном большом резервуаре (2), предпочтительно цилиндрической формы с многоугольным поперечным сечением, оборудованном термоизоляцией (2а) и имеющем большие размеры, причем по меньшей мере его наименьший размер в горизонтальной плоскости, в частности его ширина, превосходит 20 м, а предпочтительно составляет от 25 до 50 м, а объем превышает 10000 м, причем указанный большой резервуар (2) установлен внутри корпуса (4) судна на несущей конструкции (11). Судно или плавучая платформа содержит множество устройств для обнаружения возмущения жидкости внутри указанного большого резервуара (указанных больших резервуаров), называемых «маячками» (5, 5-1, 5-2), содержащих: а) вибрационный датчик, представляющий собой вибрационный акселерометр, b) электронный вычислительный модуль, содержащий микропроцессор и встроенную память, выполненный с возможностью обработки сигнала, измеренного указанным вибрационным датчиком (5а), с целью, по меньшей мере, устранения собственных фоновых шумов судна, с) средства передачи указанного сигнала после его обработки указанным электронным вычислительным модулем в центральный модуль или контроллер (6), предпочтительно установленный на судовом мостике. Технический р
Формула
a) вибрационный датчик (5а), представляющий собой вибрационный акселерометр, выполненный с возможностью измерения амплитуды ускорения (g) как функции от времени (t) вибрационных перемещений стенки указанного большого резервуара или стенки судна, не находящейся в соприкосновении с морской водой, причем указанная стенка судна может представлять собой палубу (4а) судна или стенку (2а-1) внутренней конструкции судна, предпочтительно стенку части внутренней конструкции, несущей указанный большой резервуар, причем указанные датчики прикреплены к такой стенке снаружи указанного большого резервуара,
b) электронный вычислительный модуль (5b), содержащий микропроцессор и встроенную память, выполненный с возможностью обработки сигнала, измеренного указанным вибрационным датчиком (5а), с целью, по меньшей мере, устранения собственных фоновых шумов судна и обнаружения движения жидкости внутри указанного большого резервуара путем сравнения значений обработанного таким образом сигнала с заранее определенными пороговыми значениями, по превышении которых возмущение свободной поверхности жидкости (3) считается представляющим опасность повреждения и разрушительной деформации указанной стенки, и
c) средства (5d) передачи указанного сигнала после его обработки указанным электронным вычислительным модулем в центральный модуль или контроллер (6), предпочтительно установленный на судовом мостике.
- указанный электронный вычислительный модуль, выполненный с возможностью осуществления следующих этапов обработки сигнала:
- указанные средства (5d) передачи, выполненные с возможностью их активации указанным электронным вычислительным модулем (5b) и с возможностью передачи указанных максимальных временных значений ускорения и, предпочтительно, указанных максимальных значений спектральной плотности энергии (е1, е2) и/или максимальных значений спектральной плотности мощности (P0) и, более предпочтительно, указанных значений спектральной энергии и спектральной мощности соответственно, полученных на этапе 1.3), в центральный модуль (6), предпочтительно установленный на судовом мостике и обеспечивающий сбор данных, передаваемых всеми указанными маячками (5), причем указанные данные передаются в центральный модуль, предпочтительно установленный на судовом мостике и собирающий данные, передаваемые всеми указанными маячками, если по меньшей мере один из маячков зарегистрирует превышение одного из указанных на этапе 1.4) пороговых значений.
1) осуществляют указанную обработку сигнала, предпочтительно после активации указанного электронного вычислительного модуля, когда движения судна достигают порогового значения, и
2) осуществляют указанную передачу значений, полученных на этапе 1), из указанного электронного вычислительного модуля (5b) в указанный центральный модуль (6).
Комментарии